 Yannik Stradmann
Yannik Stradmann Johannes Schemmel
Johannes Schemmel- Kirchhoff-Institute for Physics, Heidelberg University, Heidelberg, Germany
The BrainScaleS-2 system is an established analog neuromorphic platform with versatile applications in the diverse fields of computational neuroscience and spike-based machine learning. In this work, we extend the system with a configurable realtime event interface that enables a tight coupling of its distinct analog network core to external sensors and actuators. The 1,000-fold acceleration of the emulated nerve cells allows us to target high-speed robotic applications that require precise timing on a microsecond scale. As a showcase, we present a closed-loop setup for commuting brushless DC motors: we utilize PyTorch to train a spiking neural network emulated on the analog substrate to control an electric motor from a sensory event stream. The presented system enables research in the area of event-driven controllers for high-speed robotics, including self-supervised and biologically inspired online learning for such applications.
1 Introduction
Often perceived to be one of the key features of biological cognitive systems, embodiment has become subject to increasing interest within the neuroscientific community (Kiverstein and Miller, 2015; Deng et al., 2019). While state-of-the-art neural networks often outperform humans in cognitive tasks, artificial agents still severely lack behind their mammalian counterparts in applications requiring precise control and coordination of movement. The field of neurorobotics tries to overcome these deficits by tightly interconnecting physical agents to brain-inspired computing solutions. This approach promises multiple advantages compared to the classical separation of control and cognition: on the one hand, it allows research on how to leverage the advantage biological nervous systems show when executing movement in complex environments. On the other hand, our understanding for artificial cognitive systems may improve when their response to a permanent stream of complex real-world stimuli is examined. The required tight coupling can be achieved by linking simulations of biologically inspired neural networks to either real-world robots (Hagras et al., 2004) or virtual agents in simulated environments (Falotico et al., 2017). While the latter in principle allows for arbitrary complexity in both, the physics and the neural network simulation, runtime constraints often lead to significant size and fidelity limits for both components. Physical robots, in contrast, inherently experience the rich dynamics of a real-world environment. This poses strong timing requirements on the—simulated—nervous system, which needs to interact with its surroundings in realtime. Especially for biologically inspired spiking neural networks (SNNs), this prerequisite has led to the deployment of specialized neuromorphic accelerators for neurorobotic tasks (Richter et al., 2016; Blum et al., 2017; Milde et al., 2017; Kreiser et al., 2018; Yan et al., 2021; DAngelo et al., 2022). These systems integrate specific analog or digital modules for the efficient simulation—or emulation—of spiking neurons and are thereby capable of running such networks at biological realtime. This makes them a versatile tool for robotic applications operating on time scales similar to those accessible by their biological example.
In contrast to these established neurorobotic platforms, the accelerated BrainScaleS-2 (BSS-2) system operates with time constants that are 1,000-fold accelerated compared to their biological counterparts, allowing the system to tackle robotic tasks far beyond human speed (Schreiber, 2021). In this work, we present a flexible realtime event interface for BSS-2 and showcase its application with a simple closed-loop controller for brushless electric motors. This problem is well-studied and has been solved with a multitude of different algorithms, both for senosored and sensorless applications (Pillay and Krishnan, 1989; Ko et al., 1993; Acarnley and Watson, 2006; Rodriguez and Emadi, 2007; Sathyan et al., 2009; Bosso et al., 2021). While an applicable agent can be built with affordable off-the-shelf components, it does require precise timing far beyond human performance and—due to the ubiquity of electric motors—still has high technological relevance. To showcase the realtime event interface for BSS-2, we therefore present a basic controller for sensored brushless motors that has been trained to mirror the behavior of a classical controller using standard machine-learning techniques and hardware-in-the-loop training (Schmitt et al., 2017; Yao et al., 2020). We envision this setup to be a versatile platform for research on the interaction of biologically plausible spiking neural networks with fast physical systems.
2 A realtime event interface for BrainScaleS-2
BSS-2 is a hybrid neuromorphic system that has primarily been designed to facilitate research of biologically inspired SNNs (Figures 1A, B; Pehle et al., 2022). In its core, it features 512 individually configurable analog neurons, each of which is capable of reproducing the rich dynamics of the adaptive-exponential (AdEx) neuron model with high fidelity (Brette and Gerstner, 2005; Billaudelle et al., 2022). Multiple of these neuron circuits can be combined to implement multi-compartment neurons and thereby resemble the spatial structure of biological dendrites (Kaiser et al., 2022). The neurons receive input from a total of 131,072 synapses per chip, each featuring a digitally programmable weight of 6 bit resolution. These synapses can be plastic on various different time scales: while short-term plasticity is natively integrated into the analog synapse array, spike-timing-dependent plasticity is implemented through the combination of synapse-local correlation sensors with two embedded SIMD processors. These plasticity processing units (PPUs) can be programmed to execute arbitrary C++ code at runtime and therefore be used to realize user-defined plasticity rules on-chip. To do so, they have access to various different observables in the analog and digital domain, e.g., event counters, membrane potentials or the correlation signals mentioned previously.
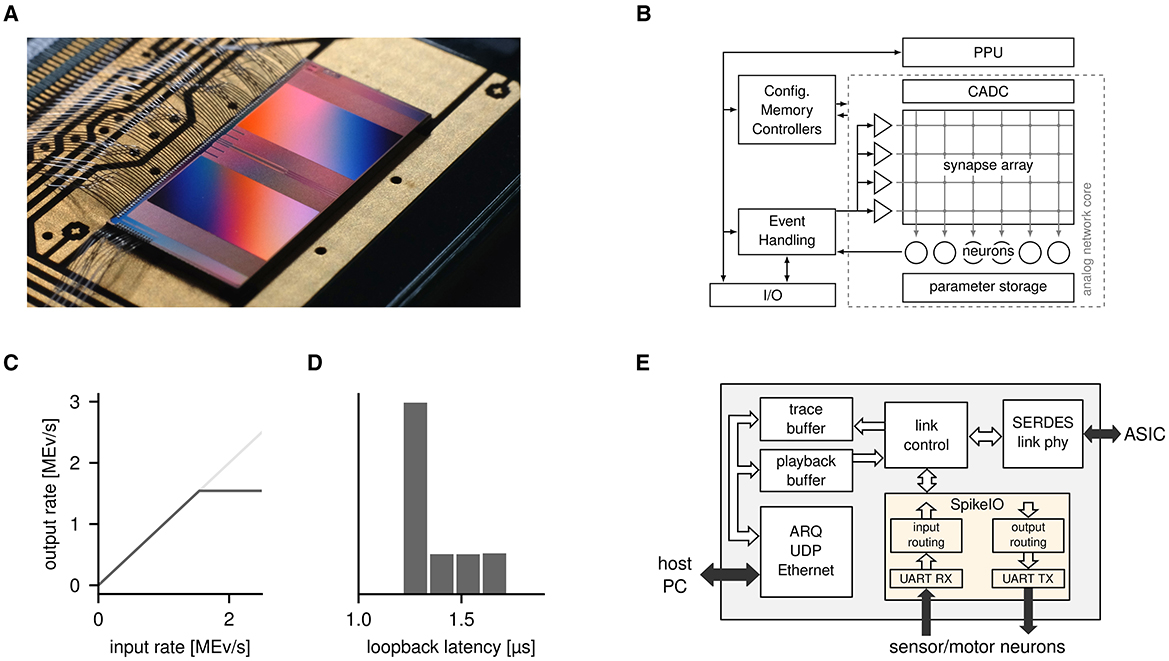
Figure 1. (A) Photograph of a BrainScaleS-2 (BSS-2) ASIC. (B) Schematic diagram of the BSS-2 ASIC with its distinctive analog network core. Figure adapted from Billaudelle et al. (2020). (C) Bandwidth measurement of the BSS-2 event interface. The presented realtime interface saturates at 1.5 MEv s-1 (full duplex), allowing for significant event traffic to/from external sensor and motor signals. (D) Loopback latency measurement of the presented BSS-2 event interface. We observe a mean roundtrip time of 1.2 μs for a spike to travel from the ASIC, through the realtime event interface and back into the ASIC. (E) Block-level diagram of the FPGA which accompanies the BSS-2 ASIC. The additions presented in this work have been highlighted in yellow: a bidirectional serial interface allows events from sensor and motor neurons to be injected/extracted in realtime. Routing tables for mapping events to/from the ASIC to virtual spike channels are configurable at runtime.
Experiments on the BSS-2 system can be formulated using two different software frontends: for SNNs focussing on the complex dynamics found in biological systems, a backend for the PyNN meta-language (Davison et al., 2009) is provided. Workloads with a focus on computational neuroscience and machine learning can rely on native integration into PyTorch (Paszke et al., 2019), which especially allows for hardware-in-the loop training paradigms (Müller et al., 2022). In both cases, the experiment can be formulated in the Python programming language—the BSS-2 software stack will then compile a stream of instructions on a host computer and transfer it to the neuromorphic system.
Due to the tight realtime requirements of the system, these instructions are executed on an intermittent FPGA, which is accessible via Gigabit Ethernet. It buffers the instruction stream compiled on the host computer, streams the data to the BSS-2 ASIC, buffers network responses from the neuromorphic chip and sends them back to the host (Figure 1E, white components). As part of this work, we have extended this FPGA by a second event interface, which allows for event injection and extraction in realtime (Figure 1E, yellow components) and thereby enables robotic applications with the BSS-2 system.
To allow for a substantial amount of (virtual) spike channels without excessive I/O pin demands, we have chosen a serial protocol for receiving and transmitting sensor and motor events. Specifically, we integrate an Universal Asynchronous Receiver/Transmitter (UART), which is widely supported across all classes of embedded devices. Since the realtime nature of the application does not require time-stamped events, any word communicated over this interface represents the channel ID of an event happening at the current time. The word size—and therefore the amount of virtual event channels—can be configured at build time, while the bitrate is a runtime parameter that can be adapted to the requirements of different external spike sources and sinks. For the data link layer we rely on an open-source implementation,1 which uses octuple oversampling to decode events received via the asynchronous interface. With a system clock of 125 MHz and a single start and stop bit, we therefore expect a serialization latency of
where we have set an exemplary interface width of w = 8bit (256 event channels). Correspondingly, the link layer is expected to saturate at . The measurements depicted in Figures 1C, D indicate that these values are reached in the physical implementation: while the measured saturated event rate of 1.5MEvs-1 directly matches the expected Bmax, the measured median loopback latency of results from the sum of tserial and the serialization latency between FPGA and ASIC. The latter is expected to add an additional delay of at least 268 ns in each direction.
For translation between external events and the BSS-2 spike format, individual routing tables for the sending and receiving directions are connected to the UART module. These tables utilize block RAM on the FPGA to provide a dense, runtime-configurable mapping between external event addresses and those used by the neuromorphic system. Users can query the BSS-2 software for the spike labels assigned to their sensor and motor neuron populations. These values can then be used to program an arbitrary mapping to external event channel IDs.
3 Showcase: BLDC motor control
To showcase the application of the presented realtime event interface in a real-world scenario, we have selected the task of commuting an electric brushless DC (BLDC) motor. We have chosen this problem due to the simplicity of the physical setup and its precise timing requirements: BLDC motors—together with sensor and power electronics—are widely available off-the-shelf components, yet they rely on precisely controlled currents to operate reliably. With typical rotational speeds far above 10,000 min–1, the timing requirements for enabling individual coils are in the sub-millisecond regime and therefore go far beyond human capabilities (Kemp, 1973). At the same time, the task is particularly suitable for biologically-inspired spiking neural networks (SNNs), since the bipolar interaction of a permanent magnet with the current-induced electromagnetic field of the coils matches the concept of antagonistic muscle pairs in vertebrates.
For the particular demonstration, we use a small gimbal motor with 12N14P configuration and a nominal rotation rate of 205 min-1. Its current rotational angle is read out with 10 bit resolution by a magnetic sensor, which communicates these values via I2C to a microcontroller (Figure 2A, top). The latter serves as a bridge between the sensor and the BSS-2 event interface and is primarily used for encoding the current rotational angle into spikes. Algorithmically, we choose a value-unit representation, for which we pool the 1,024 available raw states into 256 sensor neurons. The resulting events are then injected into the analog network emulation on BSS-2 and processed by a single feed-forward layer of six leaky integrate-and-fire (LIF) neurons. Taking inspiration from biology, we utilize pulse-density modulation for the efferent motor signals. Similar to aforementioned antagonistic muscle pairs in biology, the activity of the output neurons directly corresponds to the state of the six transistors controlling the motor: each of the three phases i can either be driven high (only active), driven low (only active), or left floating. The decoding of the output event stream is handled by a second microcontroller, which momentarily enables the corresponding signal in a 6 bit parallel bus whenever a motor neuron spikes (Figure 2A, bottom). These signals are used by the output stage of a commercial motor driver to control an internal 3-phase H-bridge. Any activity of the motor neurons emulated on BSS-2 thereby creates physical movement, which in turn results in a change of the rotational angle and therefore potentially different inputs to the SNN.
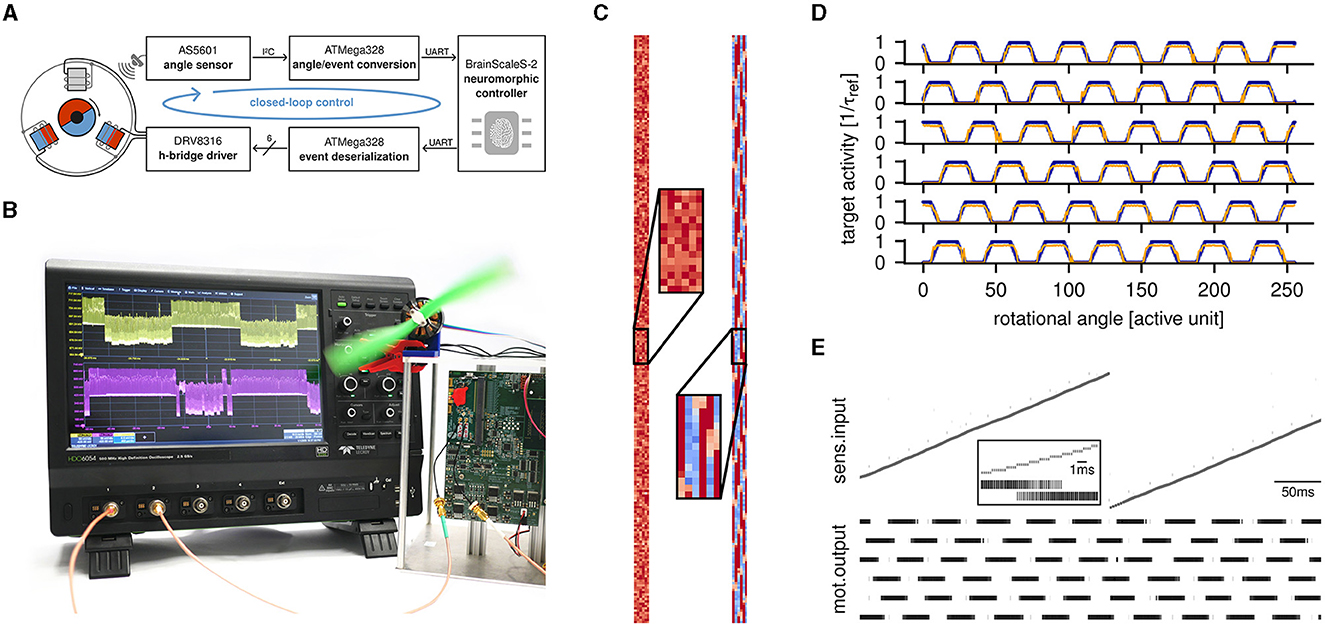
Figure 2. (A) Block diagram of the implemented closed-loop motor controller. The rotational angle is measured, converted to events and sent to the BSS-2 system in realtime. These sensory inputs are then processed by the spiking motor controller. Its motor outputs are converted to control signals for an H-bridge driver, which controls the coils of a BLDC motor. (B) Experimental setup for running the closed-loop experiment. The neuromorphic system is depicted on the right, with the BSS-2 ASIC hidden below the red dust cap. It controlls the small electric motor at the top, which drives a green propeller. The oscilloscope displays the membrane potential of two analog motor neurons on BSS-2. (C) Network weights before (left) and after (right) supervised training. The mapping between sensory input (vertical dimension) to motor output (horizontal dimension) is clearly visible after training. (D) Mapping from rotational angle to motor output. The blue data depicts a measurement of the behavior shown by a classical controller for BLDC motors. The orange curves represent spike rates measured on BSS-2 with simulated input after training. They have been normalized to 1/τref. (E) Rasterplot of the spiking motor controller during the closed-loop experiment. The motor neurons directly map to the six controllables of an H-bridge, while the sensory neurons represent the rotational angle of the motor. The transition phase for a single state shift is highlighted through magnification.
We trained this SNN-based motor controller using standard machine-learning techniques in PyTorch. To do so, we have recorded the behavior of an open-source reference BLDC motor controller (Skuric et al., 2022), lowpass-filtered the PWM outputs, and created a mapping of the current rotational angle to the resulting target activity per motor neuron (Figure 2D, blue curves). With this dataset at hand, we were able to train the SNN emulated on BSS-2 with the established hardware-in-the-loop paradigm: during training, the forward pass is evaluated on the analog neuromorphic substrate, while the gradients are computed on an idealized, differentiable model for the neuron's behavior. The presented results have been trained for 5 epochs against a L2 loss function with the Adam optimizer (Kingma and Ba, 2014), all parameters are summarized in Table 1. The orange curves in Figure 2D show the response of the hardware neurons for equal test stimuli across 20 trials post training. The strength of the neuronal response has been normalized to the inverse of the neuron's refractory time τref, as this poses an—unreachable—upper limit for the firing rate of every cell. Figure 2C shows the weight matrix of the feed-forward layer before (left) and after (right) training: when training from an initially random weight matrix, the correct mapping between the current angular position (vertical axis) and the corresponding active motor neuron (horizontal axis) clearly emerges.
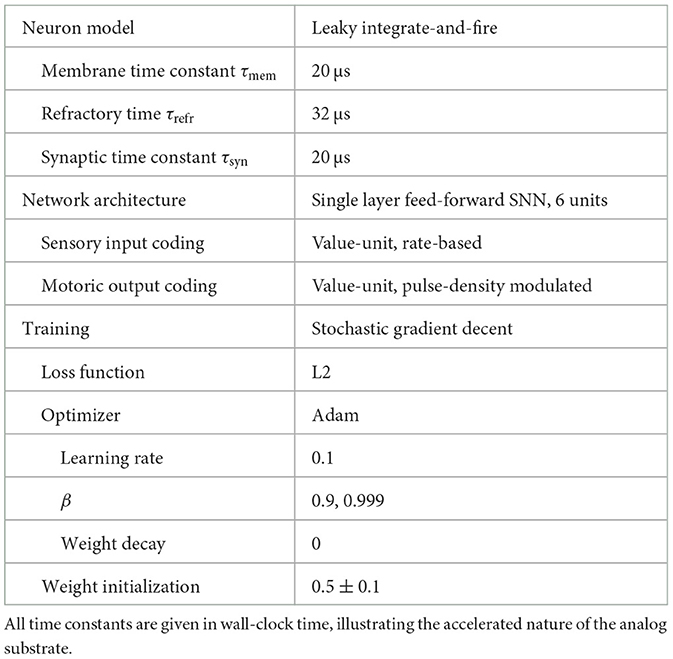
Table 1. Parameters for the presented SNN-based BLDC controller.
The full system in operation is depicted in Figure 2B, where the BSS-2 system (right side, with the ASIC hidden under a red dust cap) controls a small BLDC motor. The oscilloscope shows membrane recordings of the two motor neurons and , the areas of high activity are clearly separated from those with strong inhibition. Figure 2E shows a corresponding rasterplot with all involved signals. The linearly ascending sensory inputs indicate the continuous rotational motion of the motor, while the motor neurons show the expected repetitive six-phase commutation pattern.
4 Discussion
This work introduced a realtime spike interface for the accelerated neuromorphic BSS-2 platform, paving the way for high-speed robotic applications. Honoring the system's fast dynamics, it has been optimized for low latency, moderate bandwidth and high compatibility with embedded components for sensor inputs and motor outputs. Similar to Romero Bermudez et al. (2023), we have aimed for a generic interface, which we envision to be suitable for a cornucopia of robotic experiments. Its low latency allows users to tackle tasks requiring timing precision on microsecond-level.
As an initial application, we have shown an SNN-based controller for BLDC motors and thereby join the rank of neuromorphic control units for motor tasks that reaches back multiple decades (DeWeerth et al., 1991). The particular application has been made possible by the 1,000-fold acceleration factor of the BSS-2 system, which enables research on the unexplored grounds of biologically inspired controllers for high-speed robotic tasks. While the presented application relies on supervised training to mimic a classical controller, the setup allows for the exploration of self-supervised and—in combination with the on-chip plasticity processors—online learning. In these cases, the acceleration factor will not only enable the application of SNNs to robotic tasks with superhuman timing requirements, but also greatly reduce their training time. For the particular example of BLDC commutation, more complex networks would benefit from additional controllables and input quantities: in the afferent path, a rich sensory event stream encoding system properties like temperatures, coil currents and voltages is possible. For the motor neurons, the implemented biologically inspired pulse-density modulation might benefit from additional efferent signals for a more refined control of the coil currents. Since we implement both, the encoding and decoding between spikes and physical quantities in microcontrollers, such alterations to the system are possible without physical access. Together with the native integration of the presented realtime event interface into the BSS-2 software stack, this allows for the remote development of high-speed robotic applications through the EBRAINS platform.2
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
YS: Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Project administration, Software, Validation, Visualization, Writing – original draft, Writing – review & editing. JS: Conceptualization, Funding acquisition, Methodology, Project administration, Resources, Supervision, Writing – original draft, Writing – review & editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. The presented work has received funding from the European Union's Horizon 2020 Research and Innovation Programme under grant agreement nos. 720270, 785907, and 945539 (Human Brain Project, HBP) and Horizon Europe grant agreement no. 101147319 (EBRAINS 2.0), and from the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) under Germany's Excellence Strategy EXC 2181/1-390900948 (Heidelberg STRUCTURES Excellence Cluster). For the publication fee the authors acknowledge financial support by the Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) within the funding programme “Open Access Publikationskosten” as well as by Heidelberg University.
Acknowledgments
The authors express their thanks and gratitude to Sebastian Billaudelle, Joscha Ilmberger, and Philipp Spilger for their consistent support throughout all phases of this study. We extend our gratitude to all members of the Electronic Vision(s) group and thank them for operating the BrainScaleS-2 system.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1. ^Alex Forencich: Verilog UART, https://github.com/alexforencich/verilog-uart.
References
Acarnley, P. P., and Watson, J. F. (2006). Review of position-sensorless operation of brushless permanent-magnet machines. IEEE Trans. Industr. Electr. 53, 352–362. doi: 10.1109/TIE.2006.870868
Billaudelle, S., Stradmann, Y., Schreiber, K., Cramer, B., Baumbach, A., Dold, D., et al. (2020). “Versatile emulation of spiking neural networks on an accelerated neuromorphic substrate,” in 2020 IEEE International Symposium on Circuits and Systems (ISCAS) (Seville: IEEE). doi: 10.1109/iscas45731.2020.9180741
Billaudelle, S., Weis, J., Dauer, P., and Schemmel, J. (2022). “An accurate and flexible analog emulation of AdEx neuron dynamics in silicon,” in 2022 29th IEEE International Conference on Electronics, Circuits and Systems (ICECS) (Glasgow), 1–4. doi: 10.1109/ICECS202256217.2022.9971058
Blum, H., Dietmüller, A., Milde, M., Conradt, J., Indiveri, G., and Sandamirskaya, Y. (2017). “A neuromorphic controller for a robotic vehicle equipped with a dynamic vision sensor,” in Robotics: Science and Systems XIII (Cambridge, MA: Science and Systems Foundation). doi: 10.15607/rss.2017.xiii.035
Bosso, A., Conficoni, C., Raggini, D., and Tilli, A. (2021). A computational-effective field-oriented control strategy for accurate and efficient electric propulsion of unmanned aerial vehicles. IEEE/ASME Trans. Mechatr. 26, 1501–1511. doi: 10.1109/TMECH.2020.3022379
Brette, R., and Gerstner, W. (2005). Adaptive exponential integrate-and-fire model as an effective description of neuronal activity. J. Neurophysiol. 94, 3637–3642. doi: 10.1152/jn.00686.2005
DAngelo, G., Perrett, A., Iacono, M., Furber, S., and Bartolozzi, C. (2022). Event driven bio-inspired attentive system for the iCub humanoid robot on SpiNNaker. Neuromorph. Comput. Eng. 2:e024008. doi: 10.1088/2634-4386/ac6b50
Davison, A. P., Brüderle, D., Eppler, J., Kremkow, J., Muller, E., Pecevski, D., et al. (2009). PyNN: a common interface for neuronal network simulators. Front. Neuroinform. 2:2008. doi: 10.3389/neuro.11.011.2008
Deng, E., Mutlu, B., and Matarić, M. J. (2019). Embodiment in socially interactive robots. Found. Trends Robot. 7, 251–356. doi: 10.1561/2300000056
DeWeerth, S. P., Nielsen, L., Mead, C. A., and Åström, K. J. (1991). A simple neuron servo. IEEE Trans. Neural Netw. 2, 248–251. doi: 10.1109/72.80335
Falotico, E., Vannucci, L., Ambrosano, A., Albanese, U., Ulbrich, S., Vasquez Tieck, J. C., et al. (2017). Connecting artificial brains to robots in a comprehensive simulation framework: the neurorobotics platform. Front. Neurorobot. 11:2. doi: 10.3389/fnbot.2017.00002
Hagras, H., Pounds-Cornish, A., Colley, M., Callaghan, V., and Clarke, G. (2004). “Evolving spiking neural network controllers for autonomous robots,” in Proceedings ICRA '04 (IEEE) (New Orleans, LA), 4620–4626. doi: 10.1109/ROBOT.2004.1302446
Kaiser, J., Billaudelle, S., Müller, E., Tetzlaff, C., Schemmel, J., and Schmitt, S. (2022). Emulating dendritic computing paradigms on analog neuromorphic hardware. Neuroscience 489, 290–300. doi: 10.1016/j.neuroscience.2021.08.013
Kemp, B. J. (1973). Reaction time of young and elderly subjects in relation to perceptual deprivation and signal-on vs. signal-off conditions. Develop. Psychol. 8, 268–272. doi: 10.1037/h0034147
Kingma, D. P., and Ba, J. (2014). “Adam: a method for stochastic optimization,” in International Conference on Learning Representations (San Diego, CA).
Kiverstein, J., and Miller, M. (2015). The embodied brain: towards a radical embodied cognitive neuroscience. Front. Hum. Neurosci. 9:237. doi: 10.3389/fnhum.2015.00237
Ko, J. S., Lee, J. H., Chung, S. K., and Youn, M. J. (1993). A robust digital position control of brushless DC motor with dead beat load torque observer. IEEE Trans. Industr. Electr. 40, 512–520. doi: 10.1109/41.238020
Kreiser, R., Cartiglia, M., Martel, J. N., Conradt, J., and Sandamirskaya, Y. (2018). “A neuromorphic approach to path integration: a head-direction spiking neural network with vision-driven reset,” in 2018 IEEE International Symposium on Circuits and Systems (ISCAS) (Florence: IEEE). doi: 10.1109/iscas.2018.8351509
Milde, M. B., Dietmuller, A., Blum, H., Indiveri, G., and Sandamirskaya, Y. (2017). “Obstacle avoidance and target acquisition in mobile robots equipped with neuromorphic sensory-processing systems,” in 2017 IEEE International Symposium on Circuits and Systems (ISCAS) (Baltimore, MD: IEEE), 1–4. doi: 10.1109/iscas.2017.8050984
Müller, E., Arnold, E., Breitwieser, O., Czierlinski, M., Emmel, A., Kaiser, J., et al. (2022). A scalable approach to modeling on accelerated neuromorphic hardware. Front. Neurosci. 16:884128. doi: 10.3389/fnins.2022.884128
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J., Chanan, G., et al. (2019). “Pytorch: an imperative style, high-performance deep learning library,” in Advances in Neural Information Processing Systems 32, eds. H. Wallach, H. Larochelle, A. Beygelzimer, F. d'Alché-Buc, E. Fox, and R. Garnett (Red Hook, NY: Curran Associates, Inc.), 8024–8035.
Pehle, C., Billaudelle, S., Cramer, B., Kaiser, J., Schreiber, K., Stradmann, Y., et al. (2022). The BrainScaleS-2 accelerated neuromorphic system with hybrid plasticity. Front. Neurosci. 16:795876. doi: 10.3389/fnins.2022.795876
Pillay, P., and Krishnan, R. (1989). Modeling, simulation, and analysis of permanent-magnet motor drives, part II: the brushless DC motor drive. IEEE Trans. Industry Applicat. 25, 274–279. doi: 10.1109/28.25542
Richter, C., Jentzsch, S., Hostettler, R., Garrido, J. A., Ros, E., Knoll, A., et al. (2016). Musculoskeletal robots: scalability in neural control. IEEE Robot. Automat. Mag. 23, 128–137. doi: 10.1109/MRA.2016.2535081
Rodriguez, F., and Emadi, A. (2007). A novel digital control technique for brushless DC motor drives. IEEE Trans. Industr. Electr. 54, 2365–2373. doi: 10.1109/TIE.2007.900312
Romero Bermudez, J. P., Plana, L. A., Rowley, A., Hessel, M., Pedersen, J. E., Furber, S., et al. (2023). “A high-throughput low-latency interface board for SpiNNaker-in-the-loop real-time systems,” in Proceedings of the 2023 International Conference on Neuromorphic Systems, ICONS '23 (New York, NY: Association for Computing Machinery), 1–8. doi: 10.1145/3589737.3605969
Sathyan, A., Milivojevic, N., Lee, Y.-J., Krishnamurthy, M., and Emadi, A. (2009). An FPGA-based novel digital PWM control scheme for BLDC motor drives. IEEE Trans. Industr. Electr. 56, 3040–3049. doi: 10.1109/TIE.2009.2022067
Schmitt, S., Klähn, J., Bellec, G., Grübl, A., Güttler, M., Hartel, A., et al. (2017). “Neuromorphic hardware in the loop: training a deep spiking network on the BrainScaleS wafer-scale system,” in Proceedings of the 2017 IEEE International Joint Conference on Neural Networks (IJCNN) (Anchorage, AK), 2227–2234. doi: 10.1109/IJCNN.2017.7966125
Schreiber, K. (2021). Accelerated Neuromorphic Cybernetics. (Ph.D. thesis). Universität Heidelberg, Heidelberg, Germany.
Skuric, A., Bank, H. S., Unger, R., Williams, O., and González-Reyes, D. (2022). SimpleFOC: a field oriented control (FOC) library for controlling brushless direct current (BLDC) and stepper motors. J. Open Sourc. Softw. 7:4232. doi: 10.21105/joss.04232
Yan, Y., Stewart, T. C., Choo, X., Vogginger, B., Partzsch, J., Höppner, S., et al. (2021). Comparing Loihi with a SpiNNaker 2 prototype on low-latency keyword spotting and adaptive robotic control. Neuromorph. Comput. Eng. 1:e014002. doi: 10.1088/2634-4386/abf150
Keywords: analog neuromorphic computing, spiking neural networks, neurorobotics, closed-loop controller, high-speed robotics, motor control
Citation: Stradmann Y and Schemmel J (2024) Closing the loop: High-speed robotics with accelerated neuromorphic hardware. Front. Neurosci. 18:1360122. doi: 10.3389/fnins.2024.1360122
Received: 22 December 2023; Accepted: 05 March 2024;
Published: 26 March 2024.
Edited by:
Alex James, Digital University Kerala, IndiaReviewed by:
Kamilya Smagulova, King Abdullah University of Science and Technology, Saudi ArabiaChithra Reghuvaran, University College Dublin, Ireland
Copyright © 2024 Stradmann and Schemmel. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yannik Stradmann, eWFubmlrLnN0cmFkbWFubkBraXAudW5pLWhlaWRlbGJlcmcuZGU=