 Yuehong Gong
Yuehong Gong Shaojun Zhang1
Shaojun Zhang1- 1School of Navigation and Shipping, Shandong Jiaotong University, Weihai, China
- 2School of Information Science and Engineering, Harbin Institute of Technology at Weihai, Weihai, China
- 3Zhejiang Jialan Ocean Electronics Co., Ltd., Zhoushan, China
To keep the global search capability and robustness for unmanned surface vessel (USV) path planning, an improved differential evolution particle swarm optimization algorithm (DePSO) is proposed in this paper. In the optimization process, approach to optimal value in particle swarm optimization algorithm (PSO) and mutation, hybridization, selection operation in differential evolution algorithm (DE) are combined, and the mutation factor is self-adjusted. First, the particle population is initialized and the optimization objective is determined, the individual and global optimal values are updated. Then differential variation is conducted to produces new variables and cross over with the current individual, the scaling factor is adjusted adaptively with the number of iterations in the mutation process, particle population is updated according to the hybridization results. Finally, the convergence of the algorithm is determined according to the decision standard. Numerical simulation results show that, compared with conventional PSO and DE, the proposed algorithm can effectively reduce the path intersection points, and thus greatly shorten the overall path length.
1. Introduction
With the increasing demands of marine monitoring and exploration, the unmanned surface vessel (USV) becomes widely used in water area environmental inspection. The main research direction in the application of the USV is flight path planning. The purpose of path planning is to obtain a scientific, safe, and concise path in a specific environment. As the USV navigation environment deteriorates, the problems needed to be solved in USV path planning are becoming harsher, and the amount of calculation is also increasing, so the path planning problem gets trickier. In recent years, many studies has have been done for USV flight path planning and swarm intelligence algorithm has been popularly used, including particle swarm optimization (PSO) (Xin et al., 2019; Krell et al., 2022), artificial fish swarm algorithm (Zhao et al., 2022), ant colony algorithm (Wang et al., 2022), genetic algorithm (GA) (Park et al., 2021), and etc. Among these intelligent algorithms, particle swarm optimization is the most widely used in the field of automatic control because of its simple principle, fewer parameters, fast optimization speed, small amount of calculation and other advantages (Khayati et al., 2019). At present, the application of particle swarm optimization algorithm in robot path planning is very active (Chen and Sun, 2021; Wu et al., 2022; Xiao et al., 2022), but the research on USV flight path planning is still a frontier field. In practical application, due to the irregular, complex and uncertain USV navigation environment, the algorithm is easy to fall into local extreme values, resulting in poor quality of generated paths, waste of time and resources. Therefore, improving the global search ability and robustness of the algorithm becomes a key content in USV flight path planning. The most popular use of PSO for global path planning is genetic particle swarm optimization (GaPSO), which combines the advantages of the genetic algorithm (GA) and the particle swarm optimization algorithm. In Pehlivanoglu (2012), an improved PSO for robot path planning is presented. In Zhang and Xing (2019), GA is combined with the voronoi diagram to generate the optimal path for autonomous unmanned aerial vehicles (UAVs). The applying of GaPSO can reduce the probability of falling into local optimal solutions, however, the global search capability needs to be enhanced. Differential evolution algorithm (DE) has been used in many fields such as intelligent machines, robots, equipments and so on Yang et al. (2011) and Yildiz (2013). Because of its strong global searching ability and high robustness, DE can be used to solve multiobjective, constrained and complex optimization problems.
Compared with genetic algorithms, the global exploration ability of DE is more obvious. However, the accuracy of the optimal solution and convergence speed are affected by the parameter settings and the mutation operations. To get a compromise between the optimal solution accuracy and optimization speed, many studies have been done on the values of the control parameters, including the population size NP, the crossover probability CR, and the scaling factor F. It is well known that the size of the population increases, the probability of finding the optimal solution is higher, however the amount of calculation and computation time may also increase. The value of F has a great influence on the speed of optimization. For a larger F value, the population is more abundant, but the amount of calculation is larger and the computation time is longer. With a smaller F, the optimal solution can be found faster, but the diversity of the population can't be guaranteed, so the algorithm will easily fall into a local optimum value. To obtain appropriate parameters, a lot of studies have been done. In Yildiz (2013), the authors pointed out that F should be set to 0.5. In Li et al. (2019), the authors suggested that F should between [0.4, 0.95]. The values of these parameters are difficult to select to obtain a better performance.
In order to get a better flight path with fast optimization speed and less computation, this paper proposed a discrete particle swarm optimization algorithm with differential evolution algorithm (DeDSO) for USV flight path planning. This algorithm combines the advantages of the conventional particle swarm optimization algorithm and the differential evolution algorithm, so as to enhance the global search ability and improve the path planning efficiency and stability. In order to ensure both high search speed and high precision solution, the scaling factor F in DE is self-adaptive with the iteration.
The remainder of this paper is organized as follows. Section 2 gives the mathematical model of USV automatic inspection problem. Section 3 introduces the working principle of conventional PSO, DE, and the improved DePSO. Section 4 gives the framework and implementation procedure of the DePSO. Section 5 describes the numerical simulation results and comparison. Finally, section 6 gives a short conclusion.
2. Mathematical model of USV automatic inspection problem
Flight path planning is a global optimization problem aims to search the optimal flight path for USVs. When USV is applied in water environment inspection, it is necessary to generate a sailing path. The path planning process of the USV is shown in Figure 1. Firstly, a feasible global path is drawn according to the regional map information by identifying the surrounding environment and the status information of the USVs. Then the ship navigates according to the specified path. During the navigation, the sensors monitor the surrounding environment, and the local path planning is used to avoid obstacles, and then the ship continues to travel according to the original path.
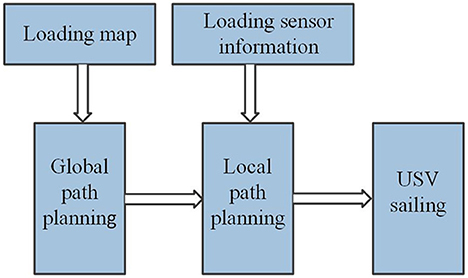
Figure 1. USV path planning process diagram.
The problem to be solved in this paper is to plan a global path for USVs applied in water area automatic inspection. In a certain water area, several sampling points are spread, which will be automatically inspected and sampled by the USVs. The purpose of flight path planning is to generate a route between the starting point and the destination, which ensures that all sampling points are inspected only once except the starting point, and the path formed should meet specific optimization objectives, which is equivalent to the traveling salesman problem (TSP) (Laporte, 2010; Zheng et al., 2022). The TSP model has been mainly used for single vehicle operating situations as described in this paper, and the main idea is to search the optimal path to visit all sampling points.
The objective function is the key point of an optimization problem. In our design, the optimization objective is demonstrated as function f, and the mathematical model corresponding to n sampling points is defined as Equation (1). Where D(i, i + 1) respects the distance between sampling point “i” and sampling point “i + 1.” In this paper, the USV sampling problem is corresponding to symmetry TSP problem, which satisfies D(i, j) = D(j, i), where i, j ∈ (1, 2, …, n).
3. Improved particle swarm optimization model
3.1. Particle swarm optimization algorithm
In particle swarm optimization, the updating of population tends to be closer to the optimal value. The optimization process of PSO is shown in Figure 2. Particles adjust their speed and direction of motion according to their own historical optimal value Pbest and global optimal value Gbest, and measure the merits of particles by optimizing the fitness value determined by the target, so as to drive the particles to the optimal value (Wu et al., 2017; Rauf et al., 2020).
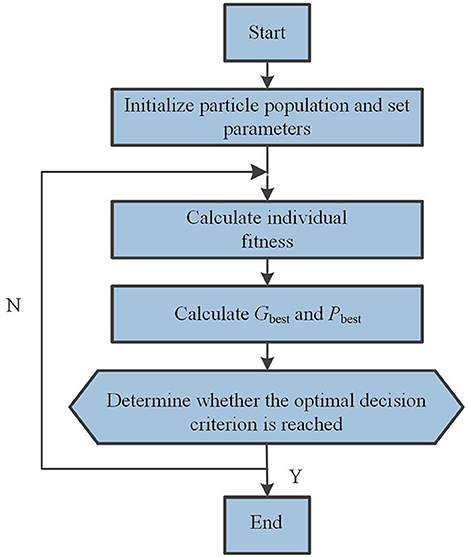
Figure 2. The optimization process of PSO.
The next generation particle position Xid(t+1) and velocity Vid(t) are calculated through Equations (2) and (3) respectively. In which, Xid(t) is the tth generation particle position; ω is the inertia weight, which determines the optimization speed of the algorithm; c1 and c2 decide the speed for the particle approaching Pbest and Gpest respectively; R1 and R2 are random numbers, and their values range from 0 to 1; In this paper, the fitness represents the length of the USV navigation route, the calculation formula is (4), in which (xi, yi) are the coordinates of the i th and the i+1 th sampling point, respectively. The pseudo code of PSO is presented in Table 1.
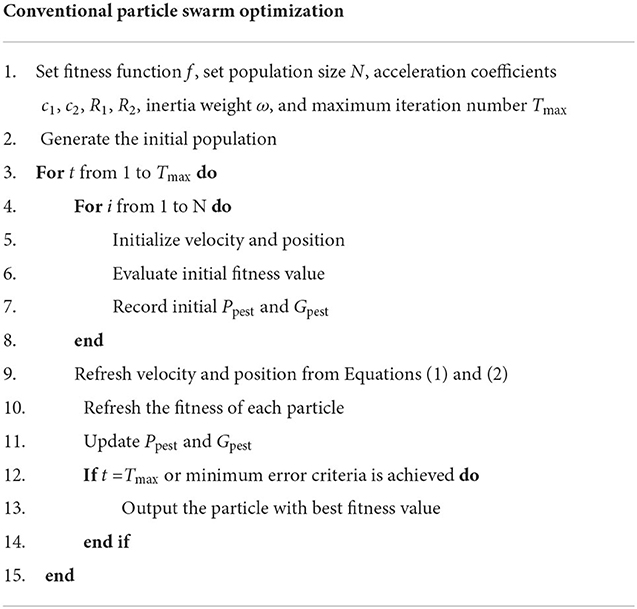
Algorithm I: Conventional PSO.
3.2. Differential evolution algorithm
Differential evolution algorithm is a bionic intelligent calculation method which simulates the natural evolutionary law to find the global optimal value. The optimization process of DE is shown in Figure 3. The main body of the algorithm generally includes three steps: mutation, crossover and selection (Yi et al., 2016; Bilal et al., 2020). The pseudo code of DE is presented in Table 2. Three different individual vectors are randomly selected to get a difference vector, denoted as Xr1, Xr2, and Xr3, and the mutation vector Vi was calculated according to Equation (5). The scaling factor F is set to control the influence of difference vector (Xr2-Xr3) on the evolution speed, and the value of F is generally between [0,1].
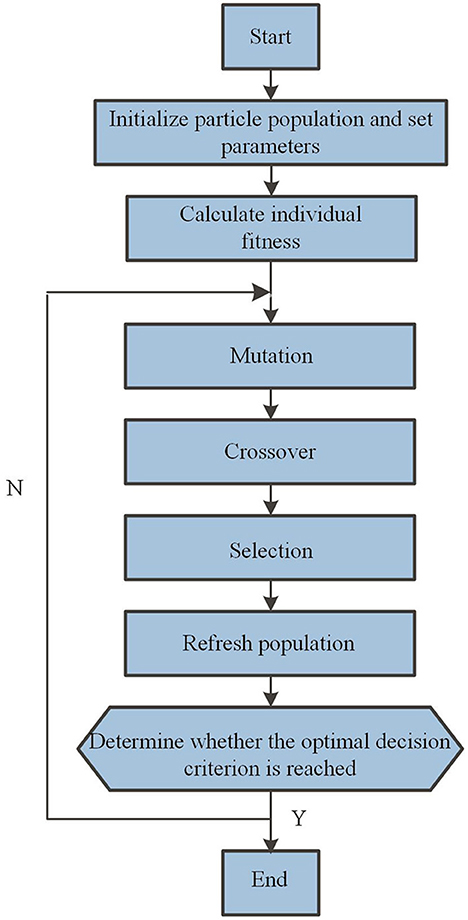
Figure 3. The optimization process of DE.
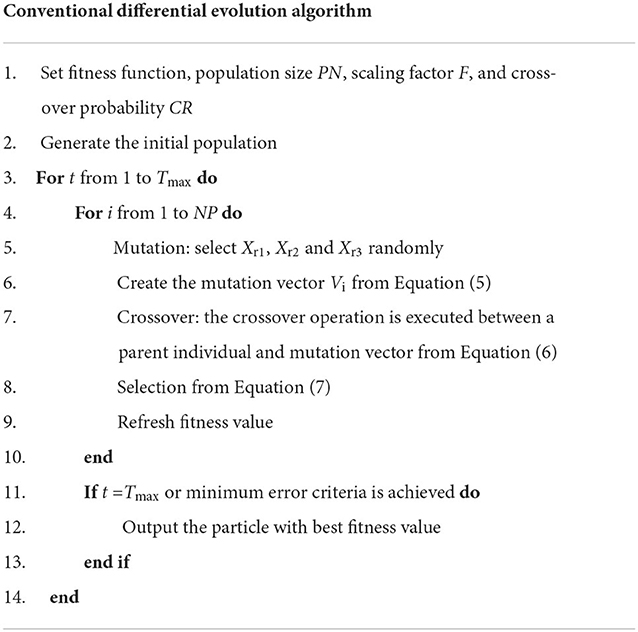
Algorithm II: Conventional DE.
The function of crossover operation is to hybridize the current individuals of the population with the mutation vector generated by the mutation, and generate new individuals randomly according to a certain probability, as shown in Equation (6). CR is the crossover probability, which determines the size of the hybridization probability, and its value is a real constant between [0,1].
The selection operation is based on the individual optimization objective to select one of the next generation individuals between the new vector generated by the crossover and the current vector. If the individual optimization objective of the new vector is better than the current vector, the new vector will be retained. Otherwise, the current vector individual will be inherited to the next generation. The selection formula is shown in Equation (7). In which, Xi(t) is the particle position before the t th iteration, Ui(t) is the new particle position after the differential evolution mutation operation of the t th iteration. Xi(t + 1) is the particle position after the t th iteration. f(Xi(t)) is the fitness value for particle position Xi(t), f(Ui(t)) is the fitness value for particle position Ui(t).
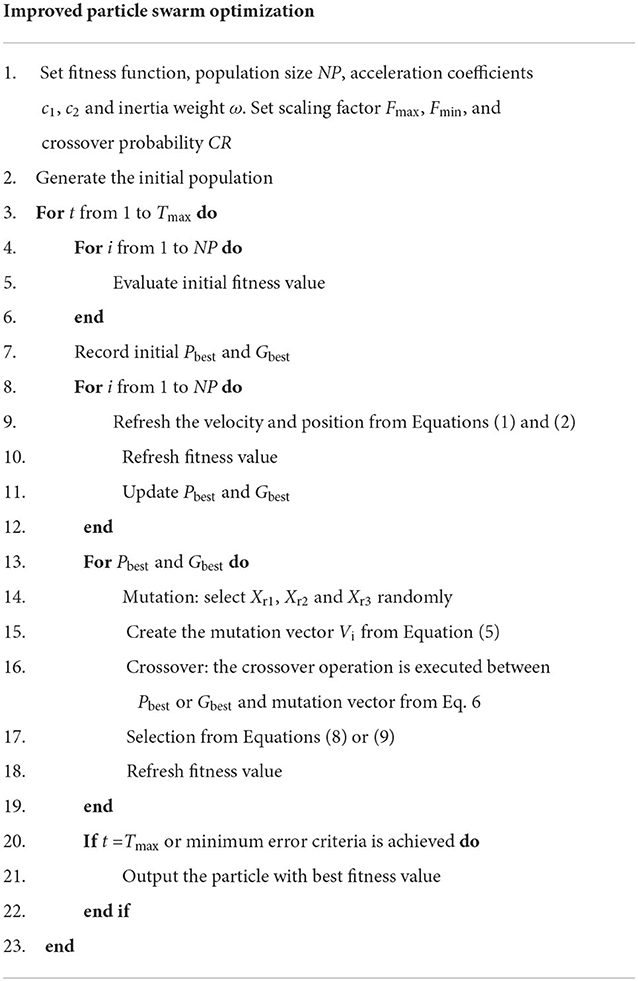
3.3. Differential evolution particle swarm optimization
In the process of population updating, the DePSO iterates from the formula of the particle swarm optimization algorithm to get a new generation of individuals, and then hybridizes them from the formula of the differential evolution algorithm. The object of hybridization is the individual optimal value Pbest and the global optimal value Gbest, the selection formula after crossing is shown in Equations (8) and (9).
In order to find a better balance between optimal solution accuracy and convergence speed, the zoom factor F is adjusted adaptively with the number of iterations. The improved formula is demonstrated in Equation (10), in which Fmax and Fmin are the maximum and minimum values of the zoom factor, Tmax is the maximum number of iterations, and t is the current number of iterations.
4. USV path planning problem
4.1. PSO applying in TSP problems
In the TSP issue corresponding to automatic inspection and sampling of unmanned pollution detection vessel, a huge number of paths will be generated during flight path planning, and the number of paths will increase factorially with the number of sampling points. A path is equivalent to a particle in PSO, the position of the particle is represented by the path sequence composed of the distribution of sampling points, and the velocity of the particle is represented by the commutator. The calculation process of optimization is realized by exchanging the position of sampling points.
Exchange operator: for two path sequences Xi = (Xi1, Xi2, …, Xn) and Xj = (Xj1, Xj2, …, Xjn), if the two sequences have different value at the same position, that is Xia ≠ Xja, thus Vij = (Xia, Xja) is called the exchange operator for the path sequence, as shown in Figure 4A.
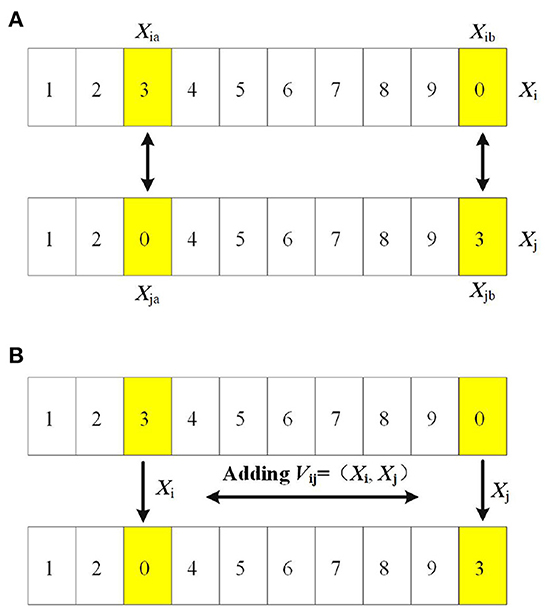
Figure 4. (A) Exchange operator. (B) Addition of position and velocity.
Exchange sequence: a sequence composed by the exchange operators, such as V= (V1,V2…,Vn), in which n is the number of locations corresponding to two cities with the same sequence but different values.
Position of the particle: the position of the particle is determined by the sequence of cities X= (X1, X2…, Xm), in which m is the number of the cities.
Velocity of the particle: the velocity of the particles is given by the exchange sequence V= (V1a, V2b…, Vmn), in which Vmn is the exchange operator.
Addition of position and velocity: in TSP, we form a new path sequence by the addition of position and velocity to the parent individual, as shown in Equation (11). On the basis of the original path sequence, the new path sequence is obtained by exchanging the city position according to the exchange operator, as shown in Figure 4B.
Subtraction between positions: the subtraction from a position to another position forms an exchange sequence that generates a new velocity. To form Vij = Xi − Xj, where Xi and Xj are the number of the cities. First we find the city in the 2th sequence which is the same to the 1st element in the 1st sequence, and form an exchange operator V(1,i). Then conduct this exchange operator to the first sequence and get a new 1st sequence. Later, find the first position in the 2st sequence with the same element in the new 1st sequence, and get an exchange operator V(2,i), this course will continue sequentially until the exchange sequence of two city sequences is obtained, as is shown in Equation (12).
Scalar multiplication of velocity: the scalar multiplication of velocity has a probabilistic meaning. For example, when Vim=cVja, the selection formula is shown in (13), in which c is a constant. During the calculation course, a random number rand is generated for each operator of Vja, compare c and rand, the value of Vim is determined by the comparison result.
4.2. DePSO applied in USV path planning
The improved differential evolution particle swarm optimization algorithm is applied to the automatic inspection sampling path planning process of USV. The initial particles are chosen randomly from the possible paths generated at the beginning, and the optimal path is found by the approach of optimal value of DePSO. In the updating and iteration process of each generation of particle population, the idea PSO and DE are combined. The specific implementation steps of the algorithm are shown in Figure 5, and the pseudo code is presented in Table 3.
Step 1: Modeling the environment according to the map model and the distribution of sampling points.
Step 2: Randomly select a certain number of path sequences as the initial particle population, and set the parameter values used in the algorithm.
Step 3: Refresh the population and calculate the fitness value of the particles;
Step 4: Find the individual optimal path Pbest and the population optimal path Gbest;
Step 5: Generate mutation vector according to mutation formula of differential evolution algorithm, and cross with Pbest and Gbest, respectively to get new path sequence. The fitness of the newly generated path sequence is calculated and compared with the fitness of Pbest and Gbest, respectively. If the path becomes shorter, the new particle position is retained, otherwise it is discarded. Update Pbest and Gbest while retaining the position of the new particle.
Step 6: Judge whether the optimal decision is reached; There are two judgment conditions: First, the minimum error criteria of fitness reaches the set accuracy; Second, reach the maximum number of iterations. If the one of the judgment conditions is met, the optimization ends. Otherwise, go back to the second step and the iteration continues.
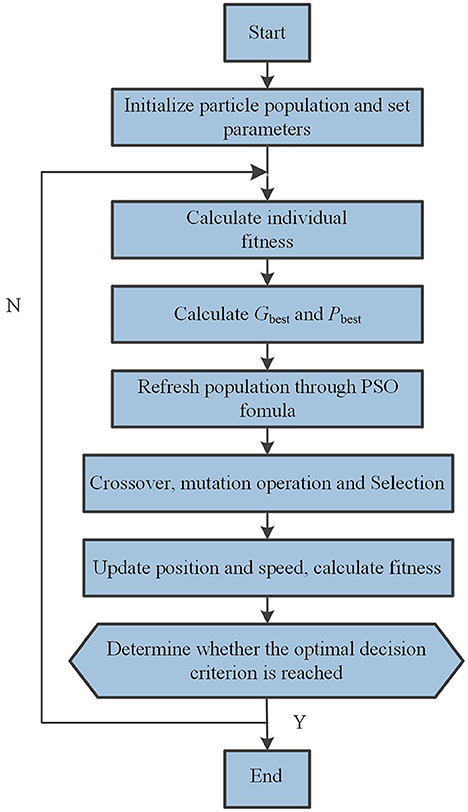
Figure 5. The optimization process of DePSO.
Algorithm III: DePSO.
5. Numerical simulation results and analysis
In order to verify the flight path planning effect of the improved DePSO for USV, numerically simulation is done to imitation the path planning process. The hardware platform and software environment applied in this experiment is demonstrated in Table 4.
Table 4. Experimental hardware and software environment.
In this paper, a 500 × 500 m sea environment shown in Figure 6 is chosen as the inspection map model. The simulation environment is set to be ideal. Assuming there are no obstacles in the sea area. The USV is set as a particle without considering the factors such as its volume and position. The environmental factors such as wind and waves are also not considered. Firstly, the USV navigation environment is modeled according to the water environment map and the sampling points distribution. Secondly the improved particle swarm optimization algorithm is applied for global path planning. For comparison, the path planning process of PSO, DE and DePSO were simulated, respectively. The coordinate settings of the 30 sampling points is shown in Figure 7A. The particle population size was selected as 200. The parameter c1 and c2 are set to 1, and the inertia weight ω is set to 1. For conventional DE, CR and the zoom factor F are set to 1. For DePSO, the maximum value of zoom factor Fmax is set to 1 and the minimum value Fmin is set to 0. Figures 7B–D give the comparison of the final results of route planning with conventional PSO, conventional DE, and DePSO, respectively, under the same map environment with 30 sampling points. Figure 7E gives the path length iterative process comparison for the three methods.

Figure 6. The sea environment map.
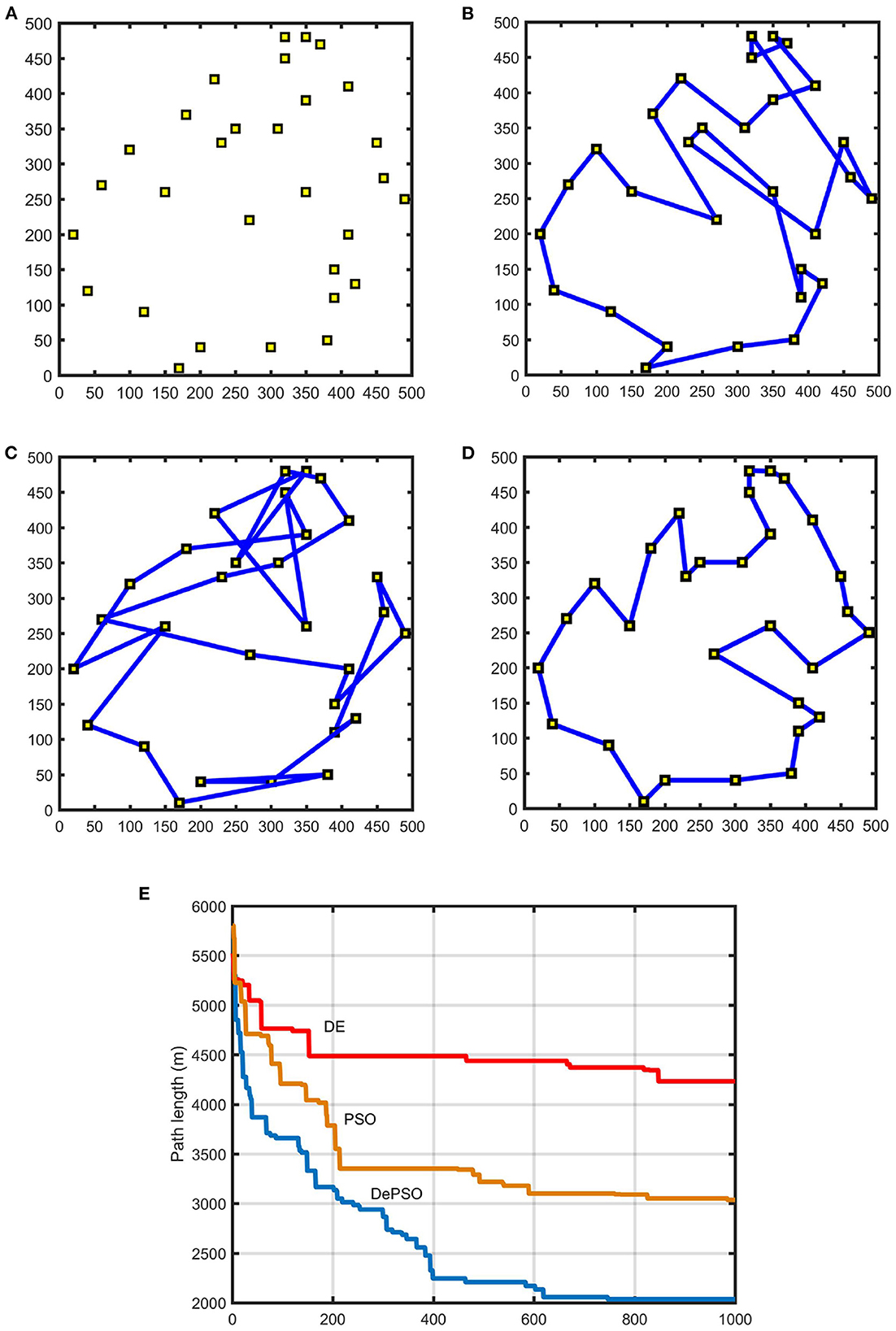
Figure 7. Path planning results for 30 sampling points: (A) Distribution of 30 sampling points. (B) Path planning result with conventional PSO. (C) Path planning result with conventional DE. (D) Path planning result with DePSO. (E) Path length iterative process comparison.
The coordinate settings of the 50 sampling points is shown in Figure 8A. Figures 8B–D demonstrate the comparison of the path planning results applying conventional PSO, conventional DE, and DePSO, respectively, under the same map environment with 50 sampling points, and Figure 8E gives the path length iterative process comparison.
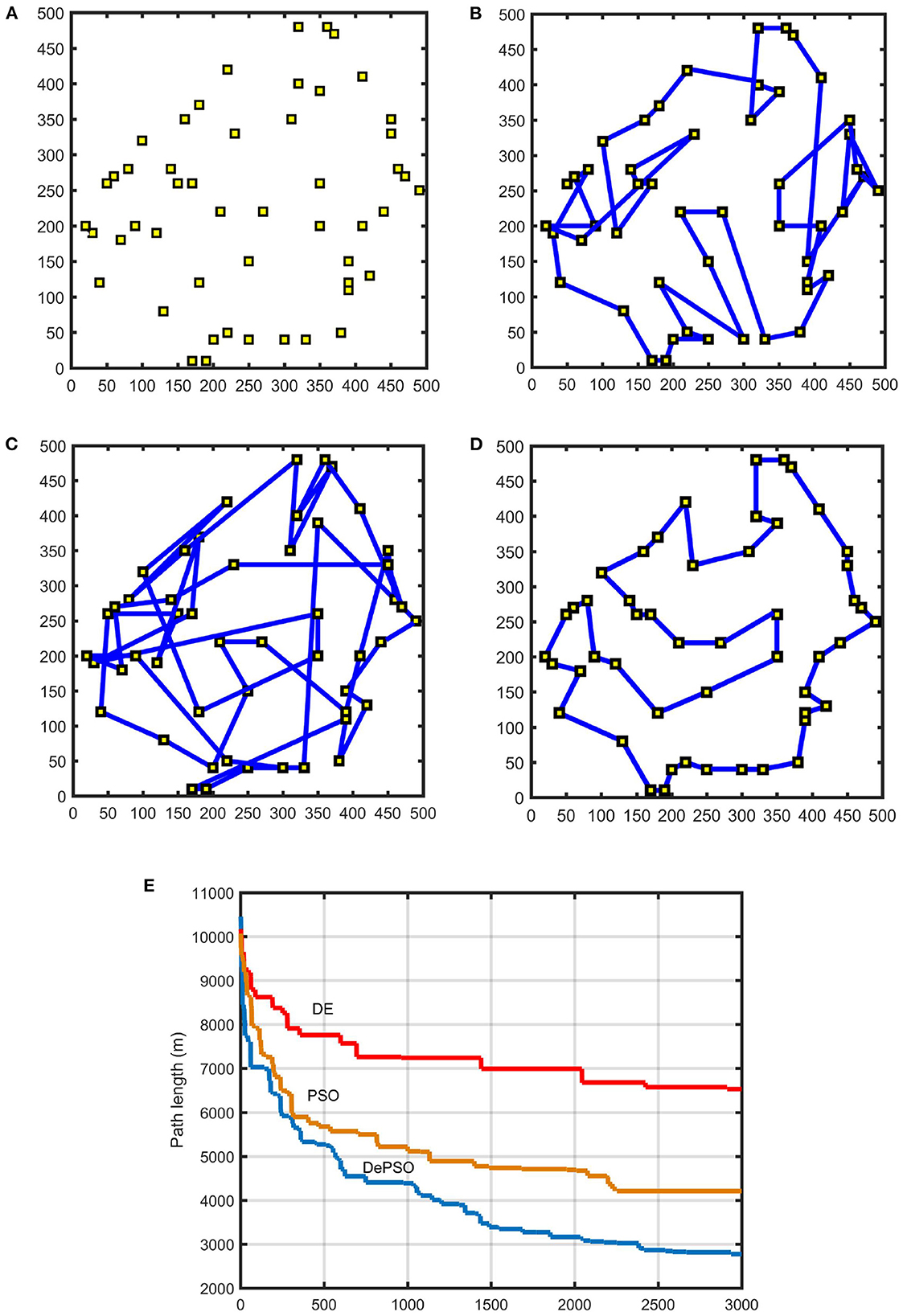
Figure 8. Path planning results for 50 sampling points: (A) Distribution of 50 sampling points. (B) Path planning result with conventional PSO. (C) Path planning result with conventional DE. (D) Path planning result with DePSO. (E) Path length iterative process comparison.
As the number of sampling points increases, the number of iterations needed to find the optimal path will also increase gradually. In Figure 7, the maximum number of iterations is 1,000. In Figure 8, the maximum number of iterations is 3,000.
As can be seen from the figures, compared with the conventional PSO and DE, by applying the proposed DePSO, the number of overlaps of the final paths is significantly reduced and the total path length is significantly shortened. Because of the combination of the two algorithms, the computation amount for an iteration is increased, so that the computation time is slightly increased. But this increasing time is negligible when comparing with speed enhancement brought by the algorithm improvement.
Table 5 lists the path planning results applying conventional PSO, conventional DE, and DePSO proposed in this paper when the sampling points are 20, 30, 40, 50, and 60, respectively. For each algorithm, 5 times of simulation are done, among which the best, average and worst path length are listed. Applying the conventional PSO and DE algorithms, there are many crossings in the path and the total length of the path lengths are long. Applying the DePSO proposed in this paper, the path complexity is greatly reduced and the path lengths are significantly shorter.

Table 5. Comparison of path lengths with PSO, DE, and DePSO.
Table 6 lists the path planning results applying the proposed DePSO with different population size when the sampling point number is 50. For each population size of 100, 200, 300, 400, and 500, 10 times of simulation are done, and the best, average and worst calculation time and path lengths are listed in Table 6. From this table we can get that, when population size rises, the optimization time becomes longer and the path lengths becomes shorter.
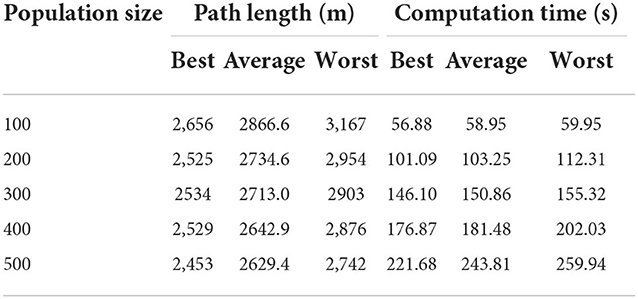
Table 6. Path planning results with different population sizes.
Table 7 lists the path planning results applying the proposed DePSO with different F ranges, when the population size is 200 and the sampling point number is 30. For each F range of [0,1], [0.05,0.95], [0.1,0.9], [0.15,0.85], and [0.2,0.8], 10 times of simulation are done, the best, average and worst calculation time and path lengths are listed. From Table 7 we can get that, the optimization result is also affected by the value range of zoom factor F. With small F range, the optimization course is fast, but the route length is longer. With the larger F value, the optimization time becomes longer and the path length is shorter.
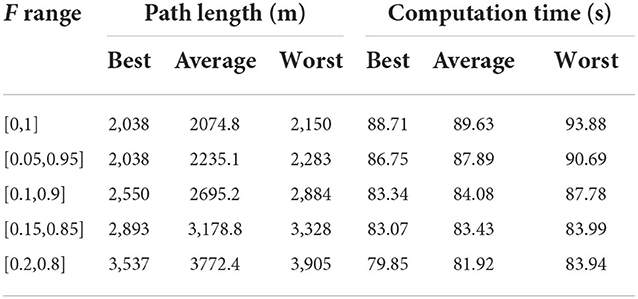
Table 7. Path planning results with different F range.
6. Conclusion
Particle swarm optimization algorithm is an effective optimization method for USV global path planning. However, conventional PSO approaches cannot always find the global optima, particularly for complex scenes. DE algorithm has the strong global search ability and good robustness. The combination of PSO and DE can enhance their advantages thus enhance the global search ability of the algorithm. In this paper, an improved particle swarm optimization algorithm (DePSO) was used for global flight path planning of automatic inspection path of USVs. In the optimization process of DePSO, the current vector is differentially crossed with the local optimal value and the global optimal value, which can further enrich the population. In order to further balance the optimal solution accuracy and optimization speed, the mutation factor is adjusted adaptively with the number of iterations. The numerical simulation results show that the proposed DePSO can realize the global path planning of the USV and achieved shorter path length than conventional PSO and DE. Compared with the existing methods, the method proposed in this paper is more suitable for the flight path planning of USV applying in water environment automatic inspection.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
YG proposed this contribution, verified, and concluded simulation results. ML gaves suggestions for simulation sets. SZ and SM gave suggestions for manuscript writing. All authors contributed to the article and approved the submitted version.
Funding
This work was partially supported by the National Natural Science Foundation of China (NSFC) Under Grant Nos. U2106202 and 12075142, the Shandong Provincial Natural Science Foundation Under Grant No. ZR2020MA102, and the Science and Technology Planning Project of Zhejiang Under Grant No. 2020C03101.
Conflict of interest
Author SM was employed by Zhejiang Jialan Ocean Electronics Co., Ltd.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Bilal, Pant M., Zaheer, H., Garcia-Hernandez, L., and Abraham, A. (2020). Differential evolution: a review of more than two decades of research. Artif. Intell. 90, 103479. doi: 10.1016/j.engappai.2020.103479
Chen, L., and Sun, H. (2021). Picking path optimization of mobile robotic arm based on differential evolution and improved a* algorithm. IEEE Access 9, 154413–154422. doi: 10.1109/ACCESS.2021.3060738
Khayati, G. R., Rajabi, Z., Ehteshamzadeh, M., and Beirami, H. (2019). A hybrid particle swarm optimization with dragonfly for adaptive anfis to model the corrosion rate in concrete structures. Int. J. Concrete Struct. Mater. 16, 28. doi: 10.1186/s40069-022-00517-9
Krell, E., King, S. A., and Carrillo, L. R. G. (2022). Autonomous surface vehicle energy-efficient and reward-based path planning using particle swarm optimization and visibility graphs. Appl. Ocean Res. 122, 103125. doi: 10.1016/j.apor.2022.103125
Laporte, G. (2010). A concise guide to the traveling salesman problem. J. Operat. Res. Soc. 61, 35–40. doi: 10.1057/jors.2009.76
Li, X., Dai, G., Wang, M., Liao, Z., and Ma, K. (2019). A two-stage ensemble of differential evolution variants for numerical optimization. IEEE Access 7, 56504–56519. doi: 10.1109/ACCESS.2019.2909743
Park, J., Kim, S., Noh, G., and Kim, H. (2021). Mission planning and performance verification of an unmanned surface vehicle using a genetic algorithm. Int. J. Naval Arch. Ocean Eng. 13, 575–584. doi: 10.1016/j.ijnaoe.2021.07.002
Pehlivanoglu, Y. V. (2012). A new vibrational genetic algorithm enhanced with a voronoi diagram for path planning of autonomous uav. Aerospace Sci. Technol. 16, 47–55. doi: 10.1016/j.ast.2011.02.006
Rauf, H. T., Shoaib, U., Lali, M. I., Alhaisoni, M., Irfan, M. N., and Khan, M. A. (2020). Particle swarm optimization with probability sequence for global optimization. IEEE Access 8, 110535–110549. doi: 10.1109/ACCESS.2020.3002725
Wang, L., Wang, H., Yang, X., Gao, Y., Cui, X., and Wang, B. (2022). Research on smooth path planning method based on improved ant colony algorithm optimized by floyd algorithm. Ships Offshore Struct. 16, 955179. doi: 10.3389/fnbot.2022.955179
Wu, Q., Song, T., Liu, H., and Yan, X. (2017). Particle swarm optimization algorithm based on parameter improvements. J. Comput. Methods Sci. Eng. 17, 557–568. doi: 10.3233/JCM-170742
Wu, Z., Zhang, Y., Dong, Z., and Li, D. (2022). Fault monitoring and diagnosis of high-pressure heater system based on improved particle swarm optimization and probabilistic neural network. Meas. Sci. Technol. 33, 1–12. doi: 10.1088/1361-6501/ac8367
Xiao, J., Liu, S., Liu, H., Wang, M., Li, G., and Wang, Y. (2022). A jerk-limited heuristic feedrate scheduling method based on particle swarm optimization for a 5-dof hybrid robot. Robot. Comput. Integr. Manuf. 78, 1–12. doi: 10.1016/j.rcim.2022.102396
Xin, J., Li, S., Sheng, J., Zhang, Y., and Cui, Y. (2019). Application of improved particle swarm optimization for navigation of unmanned surface vehicles. Sensors 19, 47–55. doi: 10.3390/s19143096
Yang, Z. Y., Tang, K., and Yao, X. (2011). Scalability of generalized adaptive differential evolution for large-scale continuous optimization. Soft Comput. 15, 2141–2155. doi: 10.1007/s00500-010-0643-6
Yi, W., Zhou, Y., Gao, L., Li, X., and Mou, J. (2016). An improved adaptive differential evolution algorithm for continuous optimization. Expert. Syst. Appl. 44, 1–12. doi: 10.1016/j.eswa.2015.09.031
Yildiz, A. R. (2013). A new hybrid differential evolution algorithm for the selection of optimal machining parameters in milling operations. Appl. Soft Comput. 13, 1561–1566. doi: 10.1016/j.asoc.2011.12.016
Zhang, G., and Xing, K. (2019). Differential evolution metaheuristics for distributed limited-buffer flowshop scheduling with makespan criterion. Comput. Operat. Res. 108, 33–43. doi: 10.1016/j.cor.2019.04.002
Zhao, L., Bai, Y., Wang, F., and Bai, J. (2022). Path planning for autonomous surface vessels based on improved artificial fish swarm algorithm: a further study. Ships Offshore Struct. doi: 10.1080/17445302.2022.2116765
Keywords: differential evolution algorithm, hybridization, mutation, particle swarm optimization, unmanned surface vessel path planning, scaling factor
Citation: Gong Y, Zhang S, Luo M and Ma S (2022) A mutation operator self-adaptive differential evolution particle swarm optimization algorithm for USV navigation. Front. Neurorobot. 16:1076455. doi: 10.3389/fnbot.2022.1076455
Received: 21 October 2022; Accepted: 17 November 2022;
Published: 06 December 2022.
Edited by:
Namkyun I. M., Mokpo National Maritime University, South KoreaCopyright © 2022 Gong, Zhang, Luo and Ma. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Yuehong Gong, Z29uZ3l1ZWhvbmdoaXRAMTI2LmNvbQ==