 Qizhi Yang1*
Qizhi Yang1* Ruoyu Zhang
Ruoyu Zhang- 1School of Agricultural Engineering, Jiangsu University, Zhenjiang, PR.China
- 2Bioproducts and Biosystems Engineering Department, University of Minnesota, Minneapolis, MN, United States
Due to the advantages of hole forming and transplanting at the same time, even on a film-covered field ridge, the cup-hanging transplanter has become one of the most widely used transplanters in agricultural operations. The cup-hanging planter is the main operating part of the transplanter. Different shapes of the hanging cup can affect the soil action mechanism, cavitation performance, and planting quality. In this study, the discrete element simulation software EDEM and the multi-body system dynamics analysis software RecurDyn are used to carry out the coupling simulation analysis. The results showed that the planting holes formed by hanging cups with two different shapes and under four different planting frequencies all met the planting requirements. After soil reflow, the transverse dimensions of the two holes are similar, and the longitudinal dimensions of the hole of the conical hanging cup are smaller than those of the multilateral hanging cup. Under the same planting frequency, the tear film size and hole-forming performance of the conical cup were better than those of the multilateral hanging cup. The result of the simulation test is consistent with that of the bench test, which proved the feasibility of using EDEM-RecurDyn coupling simulation to predict the hole-forming characteristics of the cup-hanging planter. The filmless hole-forming performances of two different shapes of hanging cups are close to each other. In terms of the film damage of film hole-forming, the conical cup is better than that of the multilateral hanging cup.
Introduction
China is a big agricultural country. Vegetables are the second most important agricultural product, ranked just behind grains (Li et al., 2018; Ding et al., 2020; Li, 2021). As one of the main vegetable planting methods in China, plug seedling has advantages of 1) high planting efficiency with reduced time, energy, and labor consumption; 2) savings of seeds and nursery space; 3) producing high uniformity of seedlings, short slow seedling period, and strong plants; and 4) being suitable for long-distance transportation and mechanical transplanting. Therefore, seedling transplantation has become one of the most important operations in agricultural production (Yang et al., 2009; Liu et al., 2018; Zhu and Yue, 2019; Qiu, 2020a; Qiu, 2020b). The cup-hanging planter can complete the work of drilling, planting, and covering soil all at once. It also protects the seedlings from being damaged and guarantees a good quality of planting. Furthermore, it is suitable for transplanting tender and fragile potted seedlings and can be planted through plastic film. Among the common planting mechanisms, the cup-type planting mechanism has been chosen by many researchers because of the advantages mentioned above (Chen, 2014; Yu et al., 2014; Liu, 2019; Yang, 2019). The different shapes of the hanging cup can affect the mechanism of action between the transplanting machine and the soil, the hole-forming performance on the film, and the quality of planting. At present, the research on the cup-hanging planter mainly focuses on the dissimilation structure and the movement track of the cup-hanging planter under low-speed working conditions. However, under the condition of medium to high speed, the planting time is shortened. As a result, the contact time between the cup and soil is shortened. The mechanism of the interaction between the planter and the soil under higher speeds has not been studied. At the same time, most of the current research is to study the interaction between tool components and soil in the process of rotary tillage and hole-forming. There are few studies on the hole-forming performance of the cup-hanging planter and the interaction between the planter and soil (Jiang et al., 2009; Yang et al., 2020; Wang et al., 2021; Wen et al., 2021). Therefore, it is of great significance to study the dynamic behavior of soil and the hole-forming property of plastic film of different shapes of hanging cups at different frequencies to improve the planting quality of cup-hanging transplanters.
The soil characteristics in different regions of the world are greatly diverse especially in the south of China which are mostly clay loam with high viscosity. The soil structure is complex with high cohesive force and is influenced by many factors. There are no matured theoretical methods that can describe the mechanism of soil-machinery interaction, while simple theoretical analysis is not enough to determine the soil-to-cup reaction force and the movement track. The field test can be time-consuming and costly, therefore it is not a good choice. The discrete element method (DEM) can effectively simulate and analyze the laws of soil movement under the action of machine tools. It also helps explore the movement and stress state of soil particles under the action of machine tools from the perspective of soil particles (Lei, 2015). However, the simulation analysis is only suitable for a small number of soil particles with a simple mechanical model. Many scholars in the world have relatively mature DEM experience and use DEM software to simulate and analyze soil particles and study the complex kinematic characteristics of the interaction between the planter and soil. Oida et al. (Fujii et al., 2002) used the DEM to simulate and analyze the dynamic behavior of lunar soil under the action of a wheel. Chen et al. (Chen et al., 2013) studied the effects of different soil conditions on the stress of subsoiling shovel-cut soil and further analyzed the change of soil disturbance behavior. Ucgul et al. (Ucgul et al., 2018) analyzed the interaction between soil particles and rototiller by using the DEM to study the mixing ability of surface soil of a rototiller and compare it with the results of field test. The results showed that the soil mixing ability under the action of rototiller can be predicted by DEM simulation. Tamás (Tamás, 2018) proposed a three-dimensional DEM model to simulate the interaction between soil and sweeper. The validity of the DEM model was verified by comparing the simulated data with the measured data. In addition, RecurDyn multi-body dynamics software can simulate and analyze the complex laws of the transplanter’s movement under ideal conditions. Using the EDEM-RecurDyn coupling simulation, we can simulate the cup-soil contact movement in the process of planting operation and study the complex kinematics characteristics of the planter under the action of soil.
DEM can be used to simulate the dynamic behavior of soil under the action of mechanical tools. In this paper, the discrete element analysis software EDEM and multi-body dynamics simulation software RecurDyn were used to simulate and analyze the hole-planting process of a cup-hanging planter of a high-speed hanging auto-transplanter so as to study the kinematic characteristics of the cup-hanging planter under the more realistic action of soil and the interaction mechanism with the soil. Under different planting frequencies, the hole-forming performance of two different shapes of hanging cups, which are mostly used in China, was simulated; the hole size and its effective depth were analyzed; and the disturbance state of soil and the stress state of two different lifting cups were analyzed. Under the planting frequency of 96 plant/row/min, the pressure drops of two kinds of hanging cups under the condition of non-reflow of soil were simulated and analyzed in order to obtain the best planting parameters for the further structure optimization, so that the high-speed hanging cup transplanter can have better planting performance.
Model establishment of the cup-hanging planter
Structure and main design parameters of the cup-hanging planter
The cup-hanging planter, the key component of the cup-lifting planter, is mainly composed of the seedling cup, the cup-lifting assembly, the spatial cam, and the opening and closing spring. After receiving the seedlings, the cup-hanging planter descends and then opens after entering the soil, so the seedlings fall into the soil. After that, the cup-hanging planter goes up and closes, waiting for the next planting. It is connected to the planting plate by fixed rotating arms on both sides, as shown in Figure 1.
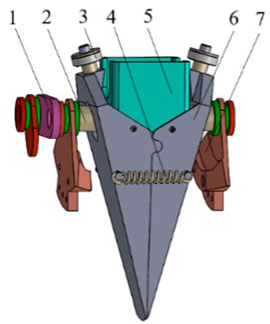
FIGURE 1. Hanging cup planter.
According to the design requirements of the cup-hanging planter (Jun et al., 2002), in this paper, the planter of the high-speed hanging automatic transplanter can install 1-6 hanging cups on one side. In the course of operation, the actual installation number can be determined according to the distance between plants. In this paper, the number of lifting cups installed in the transplanter (N) is 5. When the number of cups is fixed, the transmission ratio of the ground wheel and the planter can be regulated by adjusting the number of sprocket teeth on the planter and the hexagonal axis. According to the specific requirements of vegetable planting, the spacing of planting rows and the depth of planting can be regulated by adjusting the distance between the two cultivators and the height of the cultivator above the ground. The main design parameters of the transplanting mechanism of the transplanter in this paper are shown in Table 1.
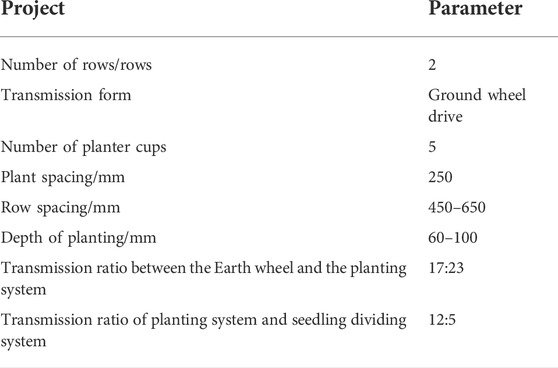
TABLE 1. Main design parameters of the transplanting mechanism.
Establishment of different hanging cup models
In this paper, two hanging cups with different shapes were selected, and their three-dimensional models were created in Solidworks, as shown in Figure 2. Then they were assembled on the platform of the planting mechanism for simulation and analysis of the formation of planting holes.
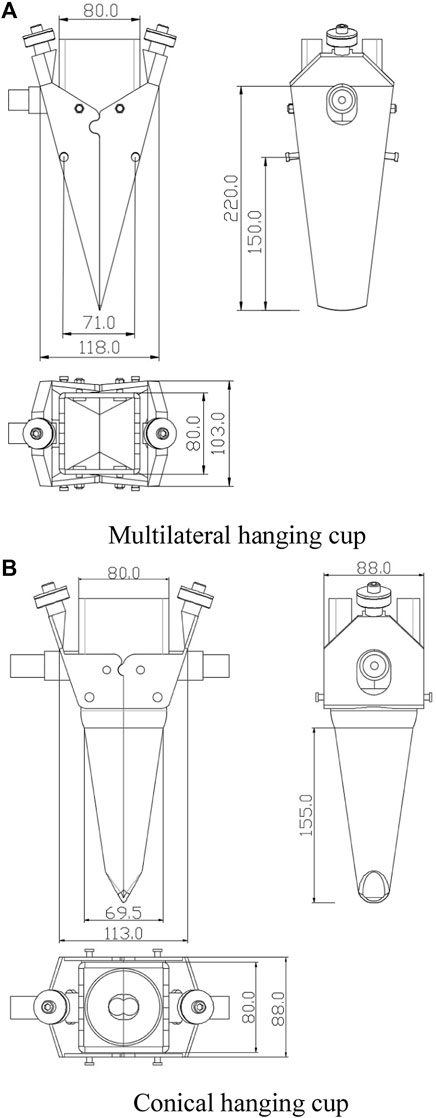
FIGURE 2. Hanging cups of different shapes.
Selection of soil parameters
In EDEM, the Hertz-Mindlin with Bonding Contact Model was chosen to define the characteristics of the soil model. In this paper, the parameters of the simulation system were obtained through the soil particle size analysis test, soil density test, soil water content test, soil direct shear test, triaxial shear test, soil accumulation angle test, virtual soil accumulation angle test, and related literature (Hu, 2019; Yao, 2019). The final simulation parameters are shown in Table 2.
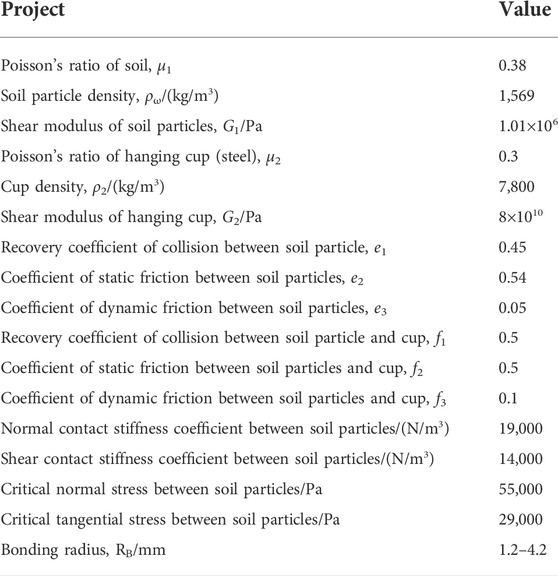
TABLE 2. Parameter table of discrete element simulation.
Establishment of a virtual prototype model
According to the actual size of the prototype (Liu, 2020), the three-dimensional prototype model is established in Solidworks, as shown in Figure 3. After simplifying the prototype by reducing the unnecessary parts, the parts are imported into RecurDyn. The constraint, contact, load, and other simulation parameters are added to the mechanism by RecurDyn. The main motion parameters, other simulation conditions and parameter equations under different planting frequencies are shown in Tables 3, 4 and Table 5. Motion 1 is the motion relationship between the Earth and the frame. Motion 2 is the motion relationship between the central axis and the bearing roller. Motion 3 is the motion relation between the central axis and the eccentric disc. The virtual prototype model after setting is shown in Figure 4.
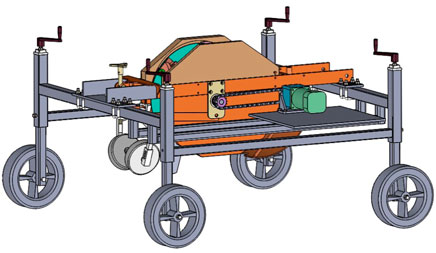
FIGURE 3. Test bench prototype.
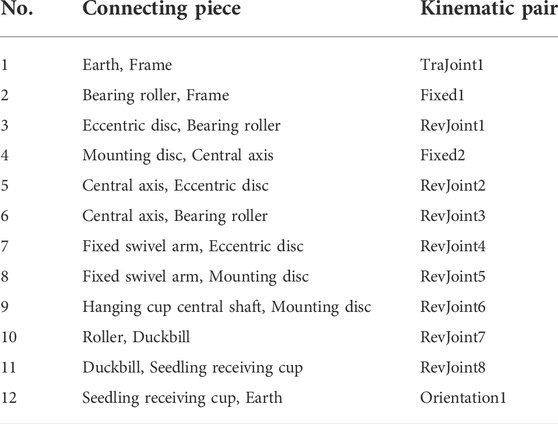
TABLE 3. Kinematic pair list of the virtual prototype model of planter.
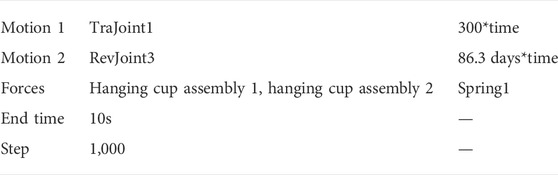
TABLE 4. Other simulation conditions (planting frequency: 72 plants/line/min).

TABLE 5. Parametric equation under different planting frequencies.
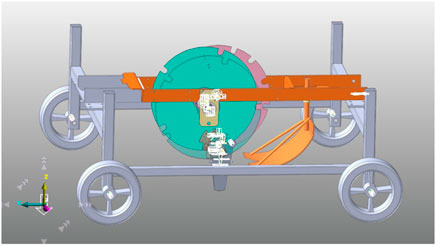
FIGURE 4. Virtual prototyping with constraints.
Selection of film parameters
The hanging cup will cause some damage to the plastic film in the process, from the beginning of entering the soil to leaving the soil completely. According to agronomic requirements, less film damage means better planting effect. Therefore, the damage degree of multilateral hanging cups and conical hanging cups to plastic film was analyzed. The process above was simulated by coupling simulation of EDEM-RecurDyn, and the hanging cup with less damage to the plastic film was analyzed. Since the film has contractility in the transverse direction, this test only compared the longitudinal dimension.
The simulation parameters of plastic film were determined by searching relevant literature (Liao et al., 2020; Wang, 2020), as shown in Table 6.
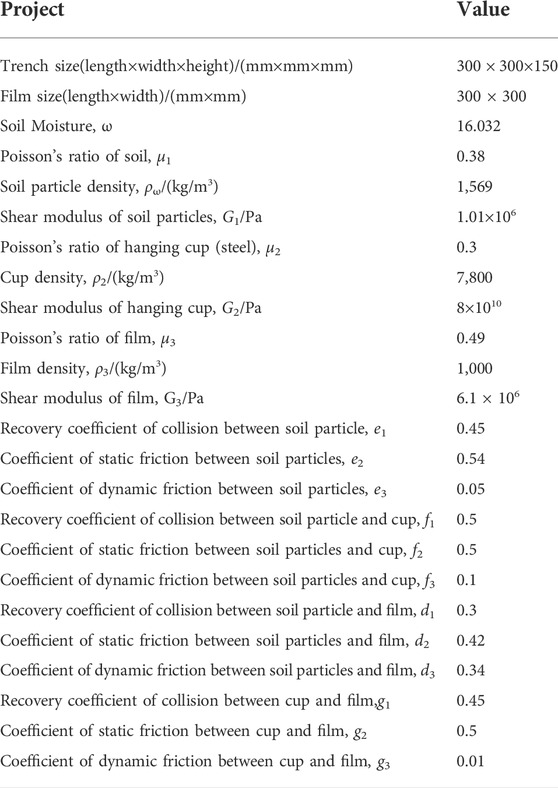
TABLE 6. Simulation parameters of hole forming on plastic film.
Analysis of the dynamic cavitation interaction between hanging cups and soil
Simulation of hole formation under different planting frequencies and different shapes of hanging cups
The planting frequencies of hanging cups were selected to be 60 plants/row/min, 72 plants/row/min, 84 plants/row/min, and 96 plants/row/min, respectively. The effective depth of the hole was measured and the hole-forming resistance was analyzed. The hole depth was selected at which the potted seedlings can just fall from the hanging cup into the planting hole as the effective depth. In this paper, the minimum distance between the hanging cup opening and closing is 45 mm. The effect of planting holes with different hanging cups under different planting frequencies is shown in Figure 5. In order to record them conveniently, the multilateral hanging cup and the conical hanging cup were marked as A and B, respectively. For example, A60 indicates the hole formation of the multilateral hanging cup when the planting frequency is 60 plants/row/min.
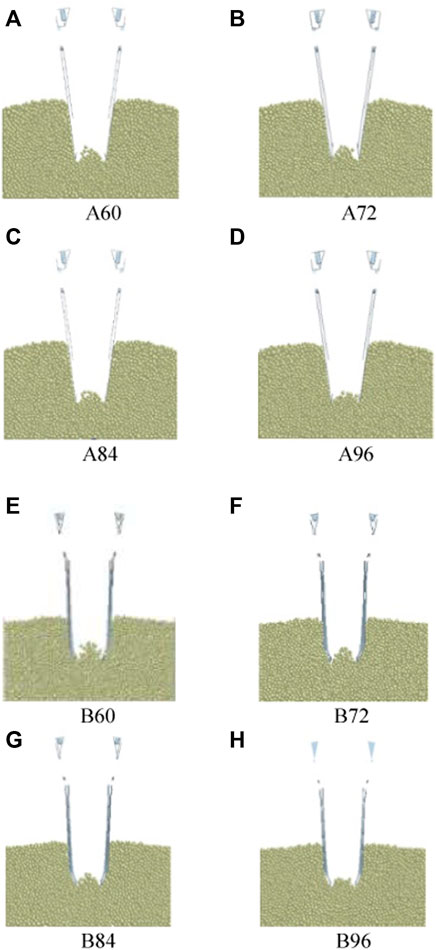
FIGURE 5. Effect of different planting frequencies on hole formation.
The effective depths of the holes were measured, as shown in Table 7.
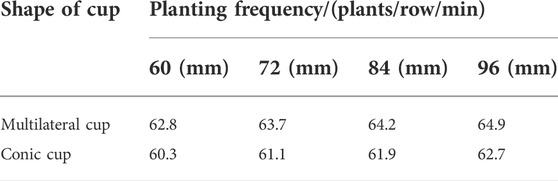
TABLE 7. Effective depths of planting holes.
As can be seen from Figure 5 and Table 7, with the increase in planting frequency, the effective depth of the planting hole increases gradually. Because the time of a hanging cup remaining in soil decreases with the increase of planting frequency, the faster the planting frequency, the shorter the soil reflux time and the lower the soil accumulation height when reaching the opening size of the bowl seedling. Table 7 shows that the effective depth of the multilateral cup is between 62.8 and 64.9 mm, and that of the conical cup is between 60.3 and 62.7 mm. The effective depth of the conical hanging cup is less than that of the multilateral hanging cup, because the opening and closing angle of the conical hanging cup is larger than that of the multilateral hanging cup, there is relatively more soil reflux. However, the effective depth of the two types of hanging cups can both meet the requirements of general vegetable cultivation.
As the cup rises to leave the soil completely, the soil particles gradually return; and when the soil particles are stabilized, a final hole is formed. The final hole-forming effect is shown in Figure 5. The hole size after stabilization (transverse length × longitudinal length) was measured, in which the transverse direction is perpendicular to the forward direction of the transplanter and the longitudinal direction is the same as the forward direction of the transplanter. In order to ensure the accuracy of the test results, under the same planting frequency, the average value of the three simulation test results is taken as the final test result. The measured results are shown in Table 8.
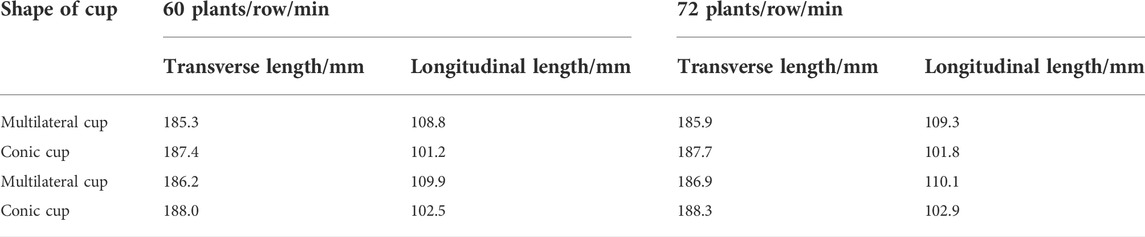
TABLE 8. Dimensions of planting holes.
As can be seen from Figure 6 and Table 8, when the eigenvalue λ of the planter, which can determine the motion track of the hanging cup, is fixed, the shaping effect of the planting hole is basically the same because the movement of the hanging cup is the same, and the size of the planting hole is slightly different due to the difference in planting frequencies. The hole size of the planter is related to the shape of the planter, the depth of the soil, and the opening and closing degree of the cup, but not to the planting frequency. However, the higher the planting frequency, the greater the impact of the cup on the soil. When the cup is removed from the soil, the soil can be returned to a wider range, resulting in an extremely slight increase in the hole size.
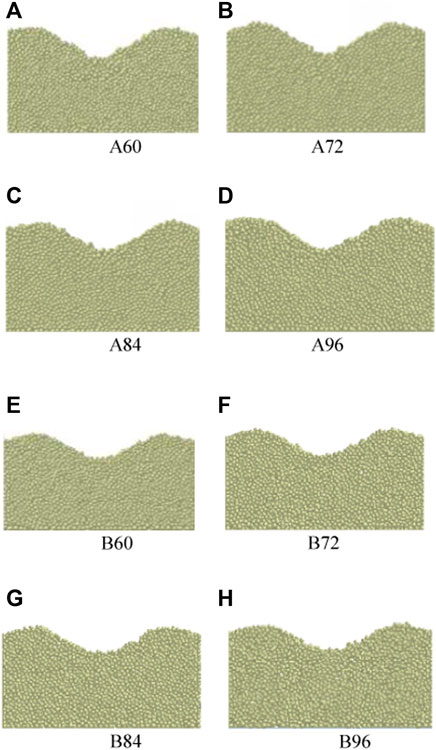
FIGURE 6. Effect of hole formation after soil reflux.
According to Table 8, when the planting frequency is 96 plants/row/min, the longitudinal hole sizes are the largest when formed by the multilateral hanging cup (110.1 mm) and the conic hanging cup (102.9 mm). The transverse size of the hole formed by the multilateral hanging cup was slightly smaller than that of the conical hanging cup, but they were both about 187 mm. The results showed that the different shapes of the hanging cup have a great influence on the longitudinal size of the planting hole, but have no obvious influence on the transverse size of the hole. The reason is that the transverse dimension is related to the opening and closing angle of the hanging cup, while the longitudinal dimension is related to the shape of the hanging cup. The opening angle of the multilateral hanging cup is smaller than that of the conical hanging cup, and the multilateral hanging cup is wider than the conical cup.
Dynamic simulation of soil movement in the process of hole formation
The movement and displacement of soil particles under stress during the process of hole formation is the key component of soil dynamic behavior research. The effective depth of the planting hole and the resistance to burrowing, obtained from a simulation test, can be used as the basis to study the dynamic soil behavior under the action of the hanging cup. The microcosmic dynamic behavior of soil particles in the process of hole formation was analyzed with the planting frequency of 60, 72, 84, and 96 plants/row/min and the depth of the dropping cup of 70 mm. According to the cloud diagram of soil particles, the changing law of hole-forming resistance of hanging cups was analyzed.
According to Newton’s laws of motion, the hole-forming resistance of the hanging cup is equal to the force on the soil particles, and the direction is opposite. The greater the force on the particles, the greater the acceleration, the greater the degree of velocity change in the same time, the more stressed particles, and the larger the velocity change area. The velocity cloud charts of soil particles under different planting frequencies were studied from the microscopic view, and the change rule of soil action force and hole-forming resistance under different movement parameters was explored. The velocity cloud chart of the hanging cup is shown in Figures 7, 10.
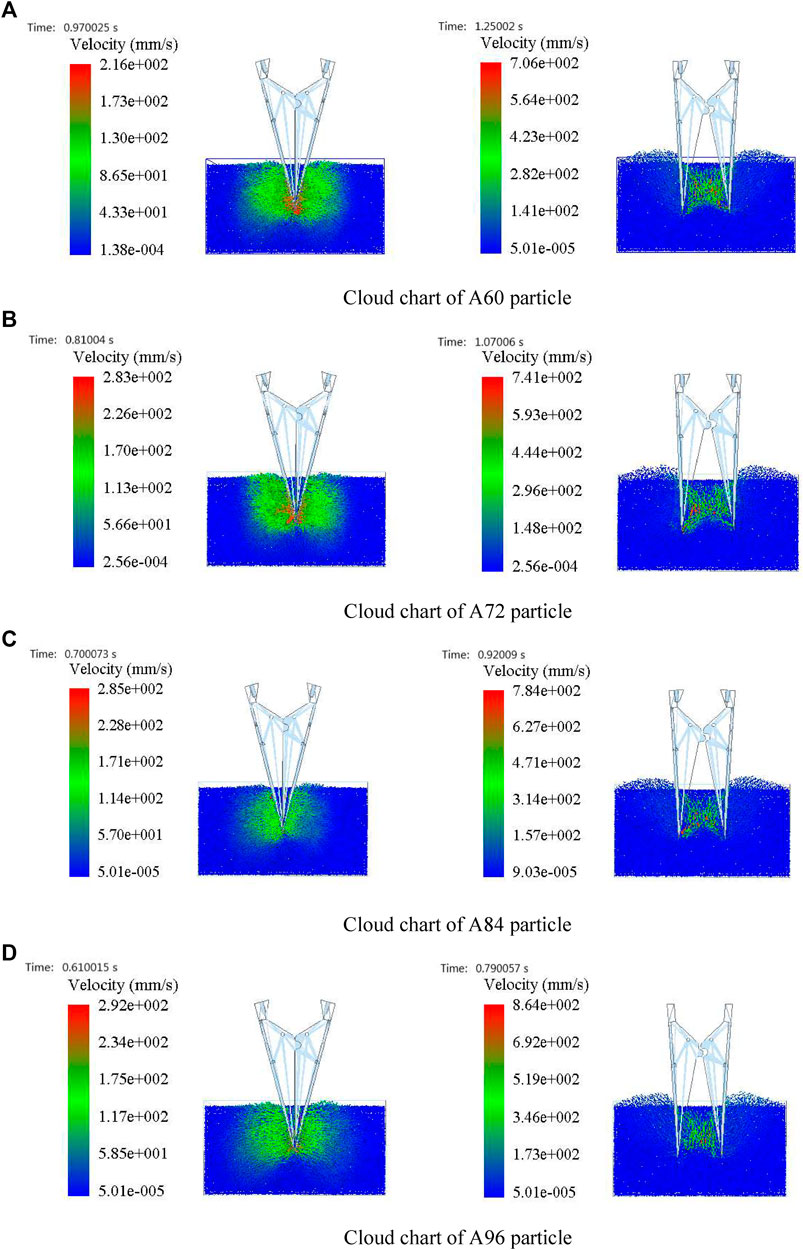
FIGURE 7. Cloud chart of particle change during the movement of a triangular conic hanging cup.
The motion state of the cup was simulated at the moment when the cup entered the soil layer and when the angle of the cup was the maximum. It can be seen from Figure 7 that during the process of entering the soil layer, the multilateral hanging cup compresses the soil particles obliquely below to make them move downward. When the hanging cup is about to open, the two hanging cup components quickly squeeze the soil on both sides, and the speed of soil particles increases instantaneously. In the process of opening the cup, the soil particles under and around the cup flow back from bottom to top to fill the planting holes until the seedlings fall down, forming the final effective depth. After the bowl falls, the cup continues to move, gradually leaving the soil layer. As can be seen from the diagram, with the planting frequency of 60 plants/row/min, the maximum velocity of soil particles was 0.216 m/s at the moment when the hanging cup was about to open. The maximum soil particle velocities were 0.283 m/s with the planting frequency of 72 plants/row/min, 0.285 m/s with the planting frequency of 84 plants/row/min, and 0.292 m/s with the planting frequency of 96 plants/row/min.
As can be seen from Figure 8, the changing law of soil particle movement in the conical hanging cup is similar to that in the multilateral hanging cup. At a planting frequency of 60 plants/row/min and at the moment when the hanging cup was about to open, the maximum velocity of soil particles was 0.25 m/s. The maximum soil particle velocity was 0.268 m/s with the planting frequency of 72 plants/row/min, 0.288 m/s with the planting frequency of 84 plants/row/min, and 0.312 m/s with the planting frequency of 96 plants/row/min.
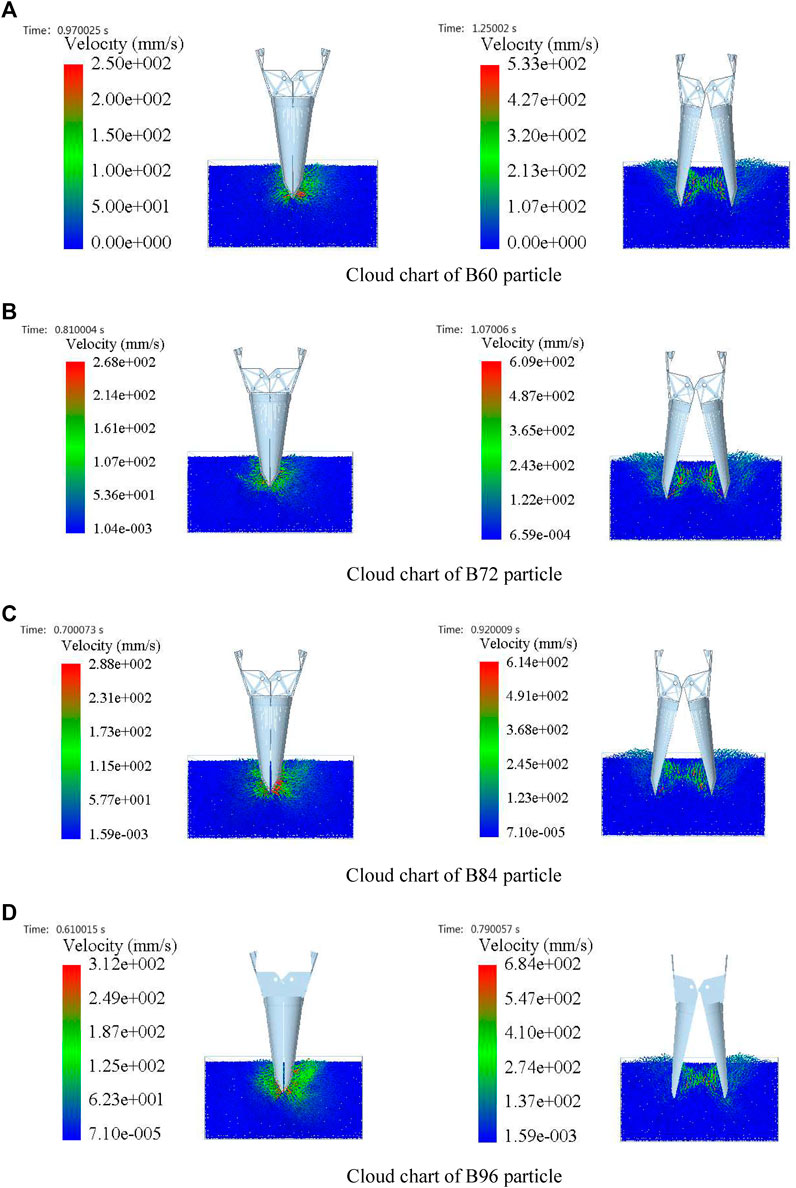
FIGURE 8. Cloud chart of particle change during the movement of a conical hanging cup.
For both types of cups, with the increase in planting frequency, the velocity of soil particles increased at the moment when the cup was about to open.
Analysis of the cavitation resistance of hanging cups under soil backflow conditions
The hanging cup squeezes the soil to make the soil particles move, and the cup is also subject to the resistance of the soil particles during the reaction process, as shown in Figure 9.
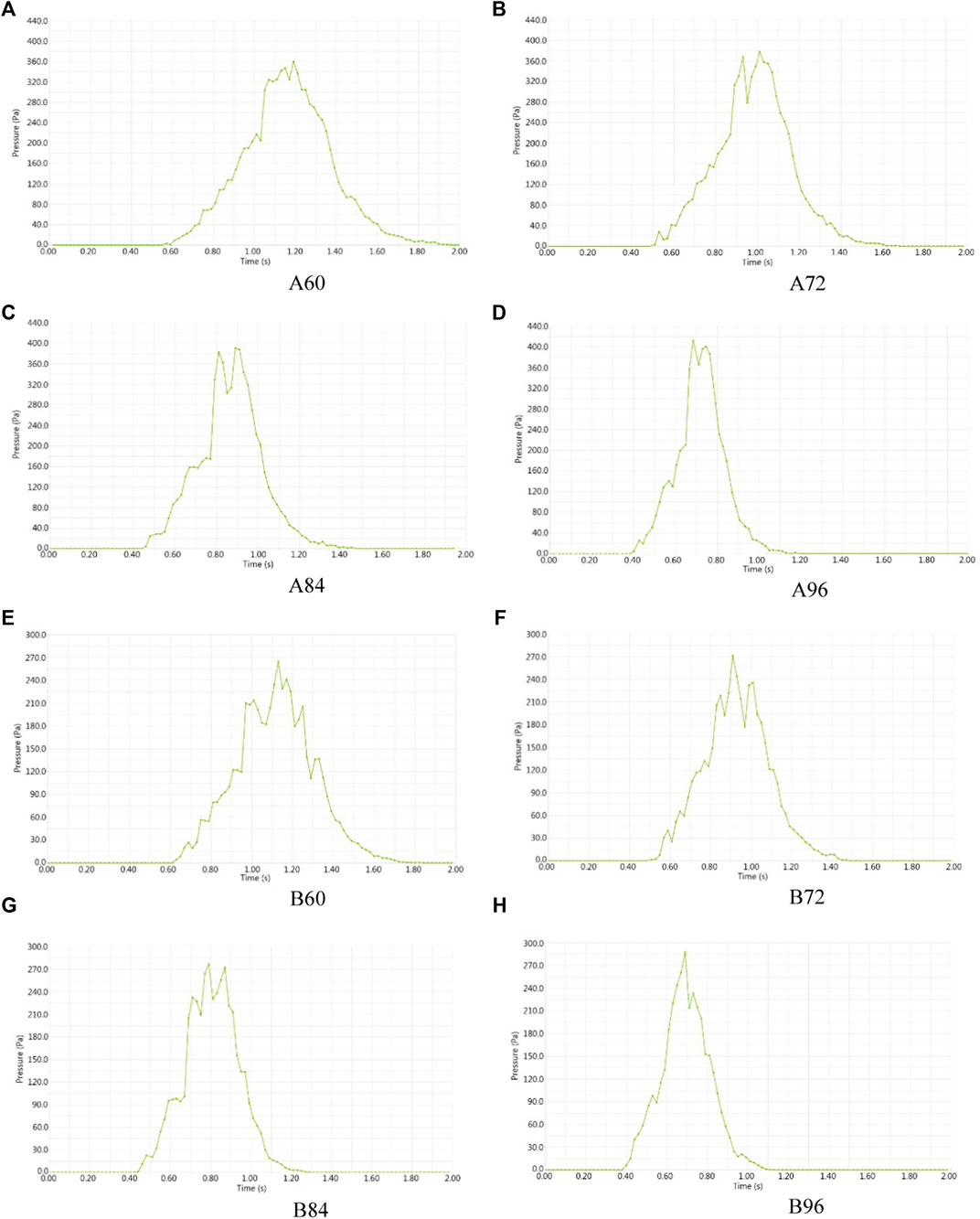
FIGURE 9. Curve of resistance variation of hanging cup cavitation.
An increase in the velocity of soil particles indicates an increase in the pressure on the cup. As shown in Figures 9A–D, the pressure in the multilateral cup gradually increased during the process of burial and gradually decreased during the excavation. Under different planting frequencies, the changing trend of the pressure on the hanging cup was basically the same. The maximum pressures on the multilateral hanging cup were 360.06 Pa with the planting frequency of 60 plants/row/min, 377.75 Pa with the planting frequency of 72 plants/row/min, 396.99 Pa with the planting frequency of 84 plants/row/min, and 412.61 Pa with the planting frequency of 96 plants/row/min.
Similar results were shown in Figures 9E–H. Compared with the multilateral hanging cup, the pressure on the conical cup was obviously reduced. When the planting frequency was 60 plants/row/min, the maximum pressure was 264.54 Pa, and the maximum pressure was 271.17 Pa for frequency of 72 plants/row/min, 277.13 Pa for a frequency of 84 plants/row/min, and 287.35 Pa for a frequency of 96 plants/row/min.
In the actual planting process, the lower soil pressure means lower hole resistance, a more stable planting process, and less cup wear. With the concern of hole-forming resistance, the simulation results showed that the conical hanging cup is better than the multilateral hanging cup.
Analysis of the cavitation resistance of hanging cups without soil backflow conditions
In the preceding paragraph, the hole-forming process and the resistance of the hanging cup are simulated under the condition that the moisture content was about 16% and the soil could flow back. When the water content increased, the stickiness between soil particles increased, the hole resistance of the hanging cup increased, and the hole resistance of the hanging cup increased with the increase of planting frequency, so 96 plants/row/min was selected as the planting frequency. When the soil does not flow back, the chosen depth of the planter is 70 mm, and the effective depth of the hole is 70 mm. According to the requirements of planting, the analysis showed that the effective depth of the planting hole is between 60 and 70 mm, which is consistent with the selected depth. Through EDEM-RecurDyn coupling simulation, the cavitation performance of the hanging cup at the planting frequency of 96 plants/row/min and without soil reflow is analyzed. The cavitation resistances of the two hanging cups in the process were analyzed to provide data support for the subsequent finite element analysis of the hanging cup.
The soil moisture content can be adjusted by changing the cohesive parameters of soil particles in the EDEM software. By continuously adjusting the parameters, the state of soil non-backflow could finally be found. The simulation results are shown in Figure 10. According to the above analysis of the cavitation resistance of the hanging cup, the hanging cup compresses the soil during the cavitation process, causing the soil particles to move and receive the reaction force from the soil particles at the same time. The pressure of the soil on the hanging cup is shown in Figure 11.
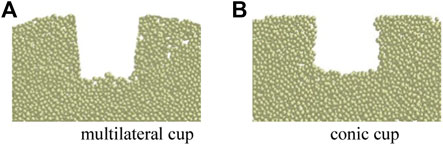
FIGURE 10. Effect of a hanging cup to form holes without backflow of soil.
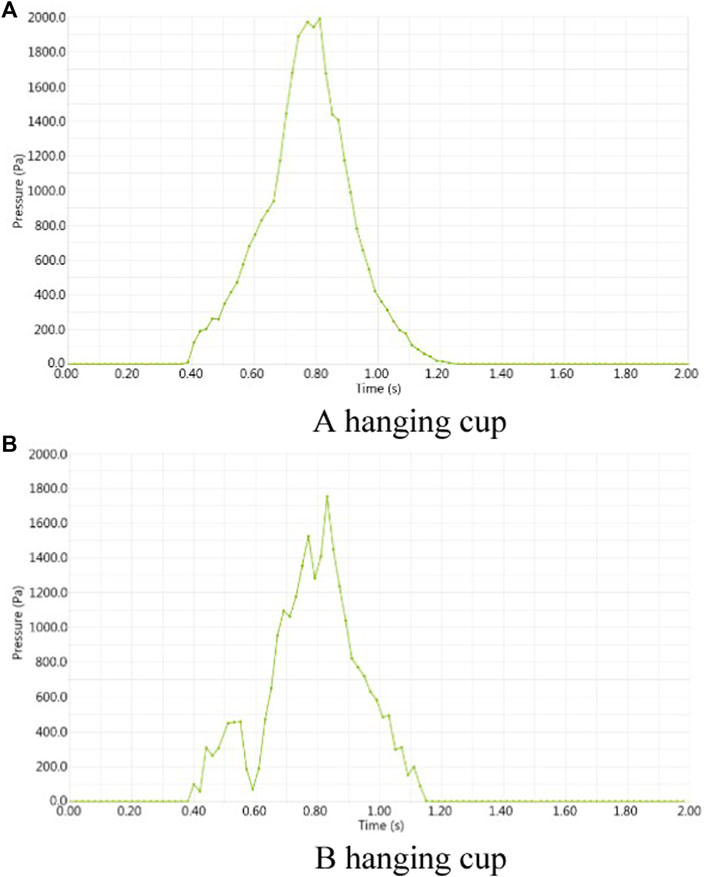
FIGURE 11. Stress diagram of a hanging cup under the condition of no backflow of soil.
It can be seen from Figure 10 that, under the condition of no soil backflow, the depth of the hanging cup into the soil is basically equal to the effective hole-forming depth, and the depth of the hanging cup into the soil can be used as the effective hole-forming depth. As can be seen from Figure 11, the law of soil reaction force on the cup under the condition of no soil backflow is similar to that under the condition of soil backflow. The maximum pressure on the multilateral hanging cup was 1990.0 pa, and the maximum pressure on the conical hanging cup was 1752.5 pa.
Simulation of the cavitation performance of different hanging cups on plastic film
According to the above parameters, a soil trough-film-hanging cup simulation model is established in EDEM, as shown in Figure 12. In this paper, hanging cups that cause less damage to the plastic film were chosen, so the plastic film was enlarged to a certain proportion when the EDEM simulation model was built. According to the above hole-forming characteristics under the condition of no film, when the characteristic coefficient λ of the planter is fixed, the hole sizes are not affected by the planting frequencies. Therefore, one planting frequency of 72 plants/row/min was selected to simulate the hole-forming performance on plastic film, and the shape and size of the holes formed by two kinds of hanging cups were compared through the simulation of EDEM-RecurDyn coupling. The results are shown in Figure 13.
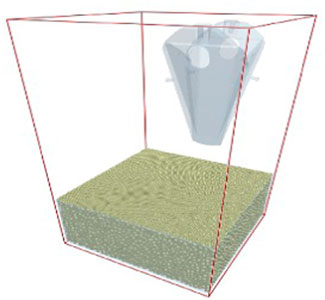
FIGURE 12. Coupling simulation model of soil, plastic film, and hanging cup.
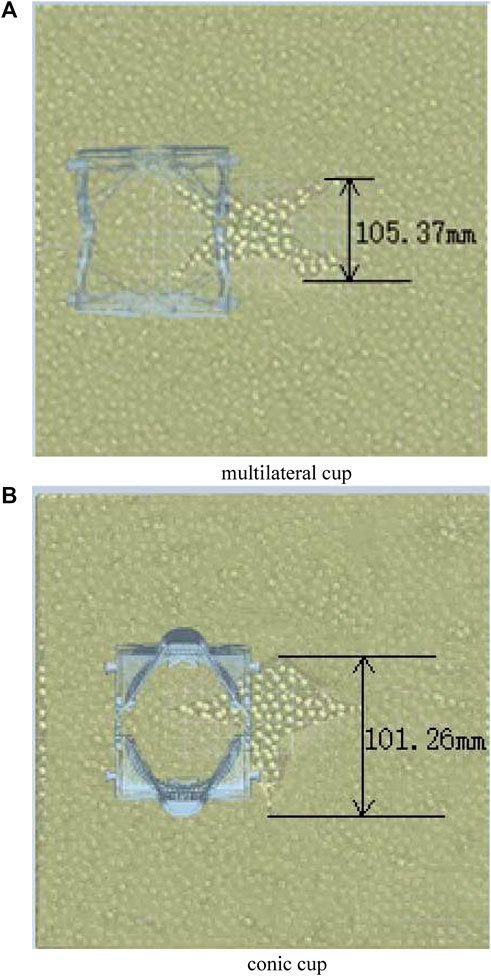
FIGURE 13. The effect of tearing plastic film by hanging cup.
When the frequency of planting was 72 plants/row/min, it can be seen from Figure 13 that the shapes of the holes formed by the two kinds of hanging cups were different. The holes formed by the multilateral hanging cup were ripped from the four corners to form the “×ˮ-shaped holes, and their longitudinal dimension was the distance between the two farthest points on the same side. The hole formed by the conical hanging cup was ripped from the middle to form a “+ˮ-shaped hole, and its longitudinal dimension was the distance between the two ends of the middle. For the accuracy of the test, three groups of parallel tests were conducted for each hanging cup, and the average value was the longitudinal dimension of the plastic film hole. The simulation results showed that the longitudinal dimension of the plastic film hole formed by the conical hanging cup was 105.37 mm, that of the multilateral hanging cup was 101.26 mm, and the longitudinal dimension of the conic hanging cup was 4.11 mm smaller than that of the multilateral hanging cup. Although the film was thickened in this simulation experiment, the measured data cannot be compared with the actual film opening size in the planting operation, but the tendency can be compared with the actual trend. The experiment shows that the different shapes of the cup have a great influence on the longitudinal dimension of the plastic film hole. From the point of view of film damage, the hole-forming effect of a conic cup is better than that of a multilateral cup.
Bench test of hole-forming characteristics of the hanging cup planter
Through the bench test of the hanging cup planter, we can test the hole-forming performance of two kinds of cups with different shapes under four different planting frequencies and the hole-forming performance of the film with the planting frequency of 72 plants/row/min. The test results were compared with the simulation results.
The test bench designed in this paper, as shown in Figure 14, mainly includes a hanging-cup-type planting mechanism, traction mechanism, and control system. The planting mechanism is driven by a servo motor, and the traction mechanism is driven by a gasoline engine. The control system is mainly used to adjust the planting speed of the planting mechanism to match the advance speed of the traction mechanism.
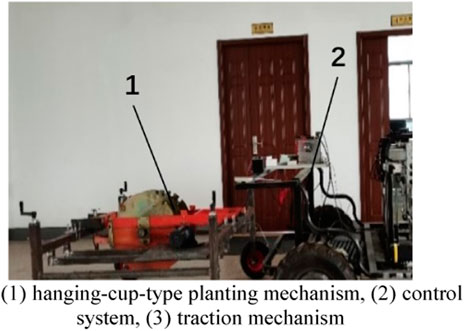
FIGURE 14. Test bench prototype.
The testing apparatus mainly includes: a multilateral cup and a conical cup (Figure 15), an angle device, a ruler, a tape measure, and a HD camera.
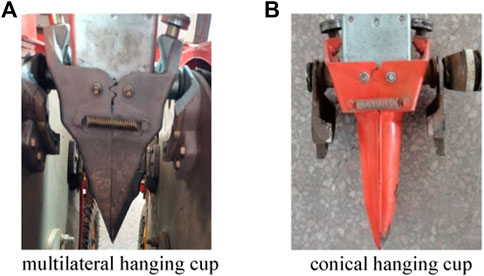
FIGURE 15. Hanging cup for test.
A laboratory bench was built, with a size of 14,000 mm × 1,000 mm × 150 mm (length × width × ridge height). Due to the soil particles in the south area are sticky and the fluidity is poor, the test effect is not obvious when the soil moisture content is changed. Sand was used to replace the test soil in the ridge and trough to make it easier to present the test results. This study is a qualitative study, meaning that the result is not only applicable to the soil in the south but also applicable to other areas.
In the experiment, a remote control was used to control the walking speed of the traction mechanism so as to change the horizontal forward speed of the transplanting mechanism. By changing the rotational speed of the speed-regulating motor, the rotational speed of the transplanting mechanism can be changed. The forwarding speed of the transplanting mechanism was matched with the rotational speed of the transplanter so as to realize the specific planting frequency. Then the hole-forming experiment was carried out and compared with the simulation results.
Hole-formation test in an open field
Non-film cavitation tests were carried out for each hanging cup with four different planting frequencies, namely, 60 plants/row/min, 72 plants/row/min, 84 plants/row/min, and 96 plants/row/min. The experiment of hole formation on film was carried out at a planting frequency of 72 plants/row/min. Each group measured the longitudinal dimension of five continuously planted holes in the middle part after walking through the whole soil groove and took the average value as the test result. The effective depth of the bench test is measured by measuring the distance between the top surface of the potted seedling and the hole surface after the seedling falls into the planting hole, and then adding the height of the potted seedling. The data for soil properties has been given in Table 2. The experiment is shown in Figure 16.
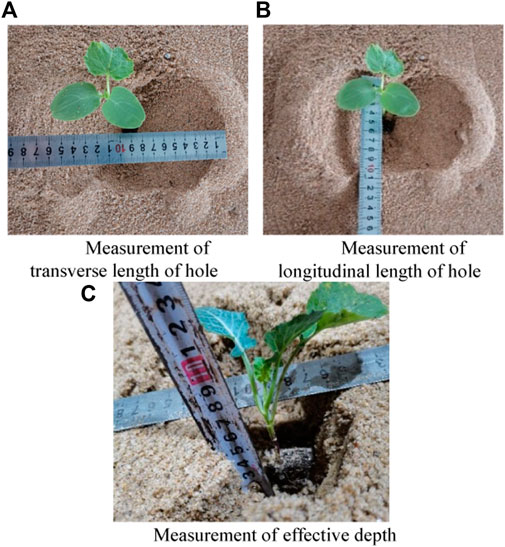
FIGURE 16. Bench test of cavitation performance.
Using four different planting frequencies, the longitudinal dimensions of five consecutive planting holes in each group were measured and the average values were taken as the experimental results, as shown in Table 9.
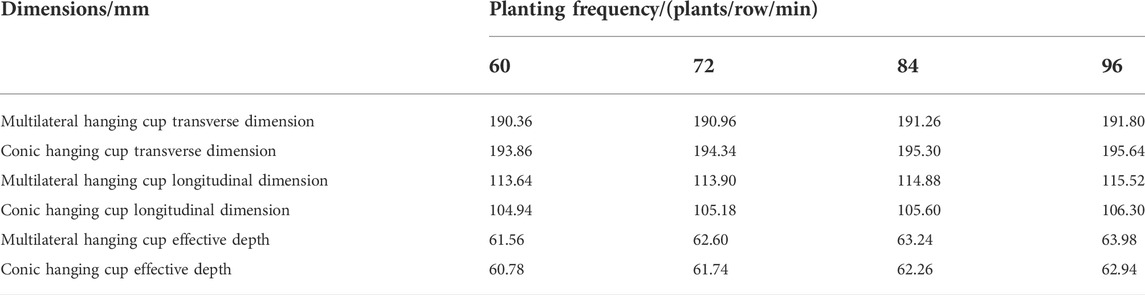
TABLE 9. Hole size for the hanging cup test.
Table 9 shows that there was a slight difference between the bench test and the simulation test. The main results were as follows: The maximum differences in the transverse length between the multilateral cup and the conical cup were 5.06 and 7.30 mm, respectively; the multilateral differences in the longitudinal length between the multilateral cup and the conical cup were 4.98 and 3.40 mm, respectively; the maximum difference in effective depth between the multilateral cup and conical cup was 1.24 and 0.64 mm, respectively. The trend between the bench test results and the simulation test results was consistent, which shows that the simulation test results are effective in the hole-forming test.
Hole-formation test on plastic film
Two hanging cups were used for a hole formation test on plastic film with a specific planting frequency, as shown in Figure 17. In this experiment, the planting frequency of 72 plants/row/min was selected, and the longitudinal tear dimensions of plastic film of five holes were measured in each group. The results are shown in Table 10.
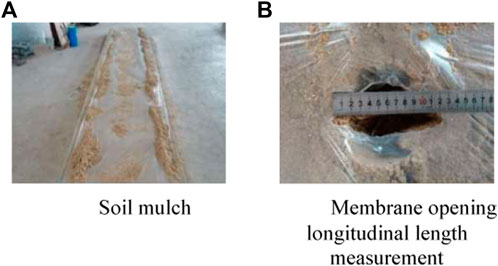
FIGURE 17. Hole-forming test on plastic film.
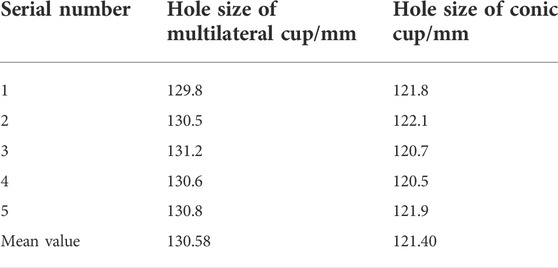
TABLE 10. Plastic film hole size (planting frequency of 72 plants/line/min).
According to Table 10, the longitudinal size of the film hole of the multilateral cup was about 130.58 mm, and that of the conical cup was about 121.40 mm. Thus, the hole-forming performance on the plastic film of the multilateral cup was better than that of the conical cup. The trend of the longitudinal hole size of the two kinds of hanging cups was consistent with that in the simulation test, which proved the rationality of using EDEM-RecurDyn coupling to simulate the hole-forming performance on the film of the planter.
Conclusion
Based on the characteristics of the hanging-cup-type transplanter, the discrete element simulation software EDEM and the multi-body system dynamics analysis software RecurDyn were used in this paper. Coupling simulation can be used to analyze the hole-forming process and the hole-forming performance on the plastic film of two different shapes of hanging cups under four different planting frequencies.
1) The effective hole-forming depth, hole size, soil disturbance state and hole-forming resistance of two kinds of hanging cups with different shapes were analyzed by means of EDEM-RecurDyn coupling simulation under four different planting frequencies. The results showed that the effective depth of the two kinds of hanging cups was more than 60 mm under different planting frequencies, which could meet the requirements of planting. After soil recirculation, the transverse size of the two holes was about 187 mm, and the longitudinal size of the hole of the conical hanging cup was smaller than that of the multilateral hanging cup. The velocity of soil particle movement and the resistance of the hanging cup increased with the increase of planting frequency. When the planting frequency was 96 plants/row/min, the pressure on the two kinds of hanging cups was the maximum, and the maximum values were 412.61 and 287.35 Pa, respectively. When the soil was not refluxed and the planting frequency was 96 plant/row/min, the maximum resistance of two kinds of hanging cups was 1990.0 and 1752.5 Pa, respectively. From the point of hole resistance, the conic cup is better than the multilateral cup.
2) Based on the EDEM-RecurDyn coupling simulation, the hole-forming performance of two kinds of hanging cups was analyzed under the condition of a planting frequency of 72 plants/row/min. The simulation results showed that the longitudinal dimension of the multilateral hanging cup was 105.37 mm, that of the conical hanging cup was 101.26 mm, and that of the conical hanging cup was 4.11 mm smaller than that of the multilateral cup. It can be concluded that different shapes of the cup have a greater effect on the longitudinal size of the plastic film hole, and the hole-forming effect of the conical hanging cup is better than that of the multilateral hanging cup in terms of the damage of the film.
3) The indoor experiments of non-film and film hole-forming in the soil trough were carried out on the platform of the transplanter. The hole-forming performance of two kinds of hanging cups with four different planting frequencies was measured by a non-film hole-forming test. The experiment showed a slight difference from the simulation. The maximum difference of the transverse length of the hole between multilateral hanging cup and conical hanging cup was 5.06 and 7.30 mm, and the maximum difference in the longitudinal length of the hole between the multilateral hanging cup and conical hanging cup was 4.98 and 3.40 mm, respectively. But the trend was consistent with the result of the simulation test. The hole-forming performance of two kinds of hanging cups on the film was measured under the planting frequency of 72 plants/row/min and the results were consistent with the simulation results. The different shapes of the hanging cups had a greater influence on the longitudinal size of the hole, but had no obvious influence on the transverse size of the hole. According to the experiment of hole-forming performance on film, it is found that the longitudinal dimensions of the film hole of the multilateral hanging cup and conical hanging cup are about 130.58 and 121.40 mm, respectively.
The result of the bench test is consistent with the result of the simulation test, which proves that the discrete element simulation hole-forming model established in this study is correct and using the discrete element simulation test method can effectively predict the hole-forming performance and quality of the planter.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary Material; further inquiries can be directed to the corresponding author.
Author contributions
QY designed the study. RZ contributed to data processing and wrote the first draft of the manuscript. CJ performed the experiments. ZL and MZ assisted the experiment. MA contributed to manuscript revision.
Acknowledgments
The authors would also like to thank Jianping Hu (Jiangsu University) and other group members.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Chen, X. (2014). “Optimal design of planting mechanism in dibble transplanter [D],”. Chinese Master's Theses Full-text Database.
Chen, Y., Munkholm, L. J., and Nyord, T. (2013). A discrete element model for soil–sweep interaction in three different soils. Soil Tillage Res. 126, 34–41. doi:10.1016/j.still.2012.08.008
Ding, H., Fan, J., Jia, C., Qin, C., Yang, Y., Zhang, H., et al. (2020). Development status and trend of vegetable seed industry in China[J]. China Veg. 379(09), 1–8.
Fujii, H., Oida, A., and Nakashima, H. (2002). “Analysis of international between lunar terrain-wheel and treated wheel by distinct element method[C],” in Proceedings of the 14th International Conference of International Society for Terrain-vehicle Systems, USA.
Hu, Changshou (2019). “Analysis of hole forming process of flue-cured tobacco transplanting and optimization of machine structure [D],”. Chinese Master's Theses Full-text Database.
Jiang, H. Y., Shi, J. H., Ren, Y., and Ying, Y. (2009). Application of machine vision on automatic seedling transplanting[J]. Editor. Office Trans. Chin. Soc. Agric. Eng. 25 (5), 127–131. doi:10.3969/j.issn.1002-6819.2009.05.024
Jun, F., Gui, Q., Song, W., and Liu, Y. (2002). The kinematic analysis and design criteria of the dibble-type transplanters [J]. Trans. Chin. Soc. Agric. Mach. 05, 48–50. doi:10.3969/j.issn.1000-1298.2002.05.015
Lei, L. (2015). Research progress and prospects of DEM in agricultural engineering application [J]. J. Chin. Agric. Mech. 36 (05), 345–348. doi:10.13733/j.jcam.issn.2095-5553.2015.05.084
Li, J. (2021). The current situation and development trend of agricultural machinery. China South. Agric. Mach. 52 (06), 47–48. doi:10.3969/j.issn.1672-3872.2021.06.023
Li, Z., Ren, Y., and Zhang, X. (2018). Development and trend of vegetable industry in China since reform and opening-up[J]. Chin. J. Agric. Resour. Regional Plan. 39 (12), 13–20.
Liao, Q., Wang, Di, Lu, Yao, et al. (2020). Design and experiment of membrane punch device for rapeseed film perforating and precision dibbling-planter [J]. Trans. Chin. Soc. Agric. Mach. 51 (08), 62–72. doi:10.6041/j.issn.1000-1298.2020.08.007
Liu, Y. (2019). “Optimization and tests about destruction mechanism of vegetable seedling-plug transplant lumps and hole-forming movement of planting devices [D],”. Chinese Doctoral Dissertations Full-text Database.
Liu, Y. (2020). Design and key technology research of hanging automatic transplanter. Chinese Master’s theses Full-text Database.
Liu, Y., Zhao, Z., Liu, L., Zhao, J., and Wang, J. (2018). Research status and development trend of vegetable plug seedling seeder [J]. Agric. Eng. 8 (01), 6–12. doi:10.3969/j.issn.2095-1795.2018.01.002
Qiu, H. (2020b). Current situation, problems and development measures of vegetable seedling industry[J]. Agric. Eng. Technol. 40 (17), 21. doi:10.16815/j.cnki.11-5436/s.2020.17.013
Tamás, K. (2018). The role of bond and damping in the discrete element model of soil-sweep interaction. Biosyst. Eng. 169, 57–70. doi:10.1016/j.biosystemseng.2018.02.001
Ucgul, M., Saunders, C., Li, P., Lee, S. H., and Desbiolles, J. M. (2018). Analyzing the mixing performance of a rotary spader using digital image processing and discrete element modelling (DEM). Comput. Electron. Agric. 151, 1–10. doi:10.1016/j.compag.2018.05.028
Wang, D. (2020). “Design and experiment of film perforating and precision dibbling-planter for rapeseed [D],”. Chinese Master's Theses Full-text Database.
Wang, N., Ren, L., Li, J., Hu, H., Wang, B., Shang, J., et al. (2021). Research status and prospect of automatic seedling picking technology of transplanter [J]. J. Chin. Agric. Mech. 42 (01), 59–66. doi:10.13733/j.jcam.issn.2095-5553.2021.01.009
Wen, Y., Zhang, J., Yuan, T., and Tan, Y. (2021). Current situation and analysis of automatic pick-up technology for vegetable plug seedlings [J]. J. China Agric. Univ. 26 (04), 128–142.
Yang, Q. Z., Huang, G. L., Shi, X. Y., He, M., Ahmad, I., Zhao, X., et al. (2020). Design of a control system for a mini-automatic transplanting machine of plug seedling. Comput. Electron. Agric. 169, 105226. doi:10.1016/j.compag.2020.105226
Yang, W. (2019). “Research and development of key components of tobacco seedling transplanting machine [D],”. Chinese Master's Theses Full-text Database.
Yang, Y., Wu, J., Chen, H., Gu, L., and Zhu, X. (2009). Development prospect and popularization strategy of vegetable plug seedling in southern jiangsu province[J]. Jiangsu Agric. Sci. (03), 218–219. doi:10.3969/j.issn.1002-1302.2009.03.097
Yao, J. (2019). “Study on optimization of bionic furrow opener based on earthworm corrugated lubricated surface [D],”. Chinese Master's Theses Full-text Database.
Yu, X., Zhao, Y., Chen, B., Zhou, M., and Zhang, H. (2014). Current situation and prospect of transplanter[J]. Trans. Chin. Soc. Agric. Mach. 45 (08), 44–53. doi:10.6041/j.issn.1000-1298.2014.08.008
Keywords: transplanting machine, cup-hanging planter, discrete element method, soil dynamic analysis, coupling simulation, cavitation performance test
Citation: Yang Q, Zhang R, Jia C, Li Z, Zhu M and Addy M (2022) Study of dynamic hole-forming performance of a cup-hanging planter on a high-speed seedling transplanter. Front. Mech. Eng 8:896881. doi: 10.3389/fmech.2022.896881
Received: 23 March 2022; Accepted: 11 July 2022;
Published: 22 August 2022.
Edited by:
Markus Holzner, Swiss Federal Institute for Forest, Snow and Landscape Research, SwitzerlandReviewed by:
Andrey Butovchenko, Don State Technical University, RussiaMustafa Gokalp Boydas, Atatürk University, Turkey
Copyright © 2022 Yang, Zhang, Jia, Li, Zhu and Addy. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Qizhi Yang, eWFuZ3F6QHVqcy5lZHUuY24=; M. Addy, bWlueHgwMzlAdW1uLmVkdQ==