 Hamid Hrimech1*
Hamid Hrimech1* Sabrina Beloufa2,3,4Frederic Merienne2Jean Michel Boucheix3Fabrice Cauchard3Joël Vedrenne2Andras Kemey4
Sabrina Beloufa2,3,4Frederic Merienne2Jean Michel Boucheix3Fabrice Cauchard3Joël Vedrenne2Andras Kemey4
- 1Laboratoire d’analyse et modélisation de système pour l’aide à la décision, Ecole Supérieure de Technologie de Berrechid, Université Hassan Premier, Berrechid, Morocco
- 2LE2I UMR6306, Arts et Métiers, CNRS, Univ. Bourgogne Franche-Comté, HeSam, Institut Image, Chalon-sur-Saône, France
- 3Laboratoire d’étude des apprentissages et du développement (LEAD) – UMR 5022 du CNRS, Pôle AAFE – Université de Bourgogne, Dijon, France
- 4RENAULT, Technical Center for Simulation – TCRAVA 013, Guyancourt, France
Serious games present a promising approach to training and learning. The player is engaged in a virtual environment for a purpose beyond pure entertainment, all while having fun. In this paper, we investigate the effects of the use of serious game in eco-driving training. An approach has been developed in order to improve players’ practical skills in terms of eco-driving. This approach is based on the development of a driving simulation based on a serious game, integrating a multisensorial guidance system with metaphors including visual messages (information on fuel consumption, ideal speed area, gearbox management, etc.) and sounds (spatialized sounds, voice messages, etc.). The results demonstrate that the serious game influences positively the behavior of inexperienced drivers in ecological driving, leading to a significant reduction (up to 10%) of their CO2 emission. This work brings also some guidelines for the design process. The experiences lead to a determination of the best eco-driving rules allowing a significant reduction of CO2 emission.
Introduction
The combustion of fossil fuels such as gasoline and diesel to transport people and goods around the world is the second largest source of CO2 emissions. Transporting goods and people produced 23% of fossil fuel related carbon dioxide emissions in 2013 (IAE, 2015), scientists and industrialists have developed an increasing awareness of environmental issues. The two criteria of fuel consumption and CO2 emission have become an important commercial argument.
However, technology is not the only crucial factor in CO2 emission. Also human factor plays a decisive role. It is obvious that drivers have a significant role to play to reduce their fuel consumption and greenhouse gas emissions by their behavior and driving style. A driver, who is not aware or misinformed about the basic rules of eco-driving, will always have a significant CO2 emission, even if he uses a car with low fuel consumption. In this instance, eco-driving appears as an appropriate solution.
Eco-driving is a training used to improve efficiency and reduce CO2 by improving road users driving style. A number of studies show an average reduction in CO2 emissions of 10–15% when eco-driving is adopted by the driver (see Table 1). Methods used in eco-driving training have generally been conducted via driving simulators or in the real world. According to Hornung et al. (2000), there are no significant differences between the two approaches. However, the traditional training methods do not allow:
• To check if eco-driving rules are properly applied.
• To say which are the eco-driving rules the best integrated by the drivers.
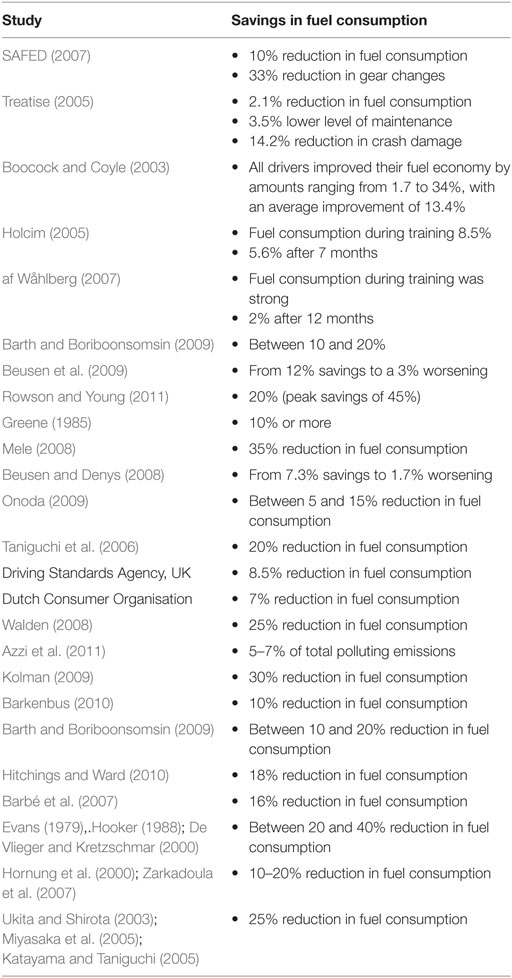
Table 1. Reported fuel savings from eco-driving studies (Abuzo and Muromachi, 2011; Wengraf, 2012).
The work presented in this paper aims at proposing an ecological serious-games-based approach in order to improve drivers’ ecological awareness and practical skills. A brief description of our approach of eco-driving learning has been presented and some results were rapidly processed in our previous conference paper (Beloufa et al., 2012). In the present paper, a particular attention will be given to the technical aspects of the study where we are going to emphasize more on the interactive guidance. We also try to evaluate the degree of achievement and integration of the eco-driving rules by the drivers.
Virtual Reality for Eco-Driving Learning
Driving Simulation
Driving simulators are found in various areas of use (such as training, industrial prototyping, behavioral studies) (Slob, 2008). A driving simulator is a system that provides a coherent multi-sensory environment for a driver to perceive and control virtual vehicle movements (Kemeny and Panerai, 2003). The driving simulation offers substantial advantages, which are listed below:
• The visual interface, which presents to the driver the current environment state in synthesized images.
• The sound interface, which is able to reproduce the sound effects.
• The proprioceptive interfaces mechanisms for motor control and posture.
○ The haptic interface to restore the efforts, which the driver will be able to feel.
○ The kinesthetic interface to make the driver feel the effects of displacement in the virtual scene, accelerations and the vibrations.
These techniques made it possible for the driving simulators to have many advantages compared to real vehicles (De Winter et al., 2012), including
• Controllability, reproducibility, and standardization: the repeatability of the situations and the control of the parameters (behavior of virtual traffic, weather conditions, etc.),
• Ease of data collection: (Measurement of position on the virtual road, distance from other cars, etc.), and
• Possibility of encountering dangerous driving conditions without being physically at risk.
Gameplay for Learning
Gameplay is a term used to describe the interactive aspects of game design. This includes game mechanisms, rules, choices, facilities, difficulties, and progression in order to achieve a goal. All these parameters play an important role in designing a good video-game. The motivation comes by the fact that the game should keep the player engaged, by giving him some tasks that will be carried out in a short-time, while making the play easy to learn but challenging to master (Prensky, 2002).
The fun component represents an important factor in the training process. According to Michael and Chen (2005) fun is a result rather than an objective. The more the tasks handled are amusing, the more the person will be motivated to perform these tasks in a voluntary way. However, the voluntary factor does not present in the case of the serious games. On the other hand, this fact does not preclude that the activity provided could be pleasant or desirable, provided it does not impede the training process (Michael and Chen, 2005).
Different playful ways have been used frequently to transmit the knowledge. Edutainment generally corresponds to educating and entertaining at the same time. The initiatives of this field had a few success because they were seen as annoying (Susi et al., 2007); furthermore, the e-Learning paradigm, which means the remote training through new multimedia technologies, has had a relative failure. In this case, the information is available online but a lack of motivation prevents to complete all exercises.
Serious-games attract a larger audience due to their interactive nature. They are always related to simulation applications. The realistic representation of simulated environments enables more immersion, and consequently more motivation. This immersion facilitates a faster training and better information retention (Michael and Chen, 2005). This potential makes the player more involved than training in a classroom (often perceived as useless and tiresome). All in all, these specifications make serious-games an interesting alternative in several sectors.
Eco-Driving
Eco-driving is a driving behavior toward the environment. Thus, the drivers will contribute to an important reduction of fuel consumption without compromising the efficient movement. According to Wengraf (2012) «Eco-driving is a set of steps, techniques and behaviors that drivers can employ in preparation of the vehicle before a journey, in planning the journey, in modifying driving style during the journey and in reviewing trip data after the journey, that can, taken together, lead to savings (at times, significant ones) in terms of fuel usage, trip cost, emissions of CO2 and other pollution, and levels of noise from vehicle use. These savings can be realized for relatively low cost compared to other kinds of efforts to reduce the environmental impacts of car use. In addition, trips made with eco-driving techniques can, in many cases, be linked to improved road safety; moreover, the use of such techniques does not increase journey times».
This type of driving presents several advantages (Ecodrive, 2016):
• Safety
○ Improve road safety and
○ Enhance driving skills.
• Financial
○ Save fuel/money (5–15% in the length-term),
○ Lower vehicle maintenance costs, and
○ Reduce costs off accidents.
• Environmental
○ Reduce greenhouse gas emissions (CO2),
○ Local fewer air pollutants, and
○ Noise reduction.
• Social
○ Responsible more driving,
○ Less stress while driving, and
○ Higher comfort for drivers and passengers.
The factors that could influence the increase of fuel consumption according to Ericsson (2001) and af Wåhlberg (2007) are:
• The driver’s behavior and knowledge: lack of information and no respect of the basic rules of eco-driving increase the energy consumption.
• The technology used by the vehicle: consumption change of a vehicle to another according to the engine technology.
• The road state: traffic state and road infrastructures.
There are several studies that have investigated the effectiveness of eco-driving in CO2 emissions (see Table 1). It is difficult to determine the real benefits of eco-driving because the basic conditions change from one study to another (vehicles, road, mathematical models used). Generally speaking, it can be said that the eco-driving can significantly affect the amount of energy and emissions and the efficient driving can reduce emissions by up to 10%. The fuel consumption from eco-driving is more significant in long distance compared to short or medium distance (Bozicnik and Hanzic, 2009). Many eco-driving programs have been implemented in the last 20 years in several countries (see Table 2).
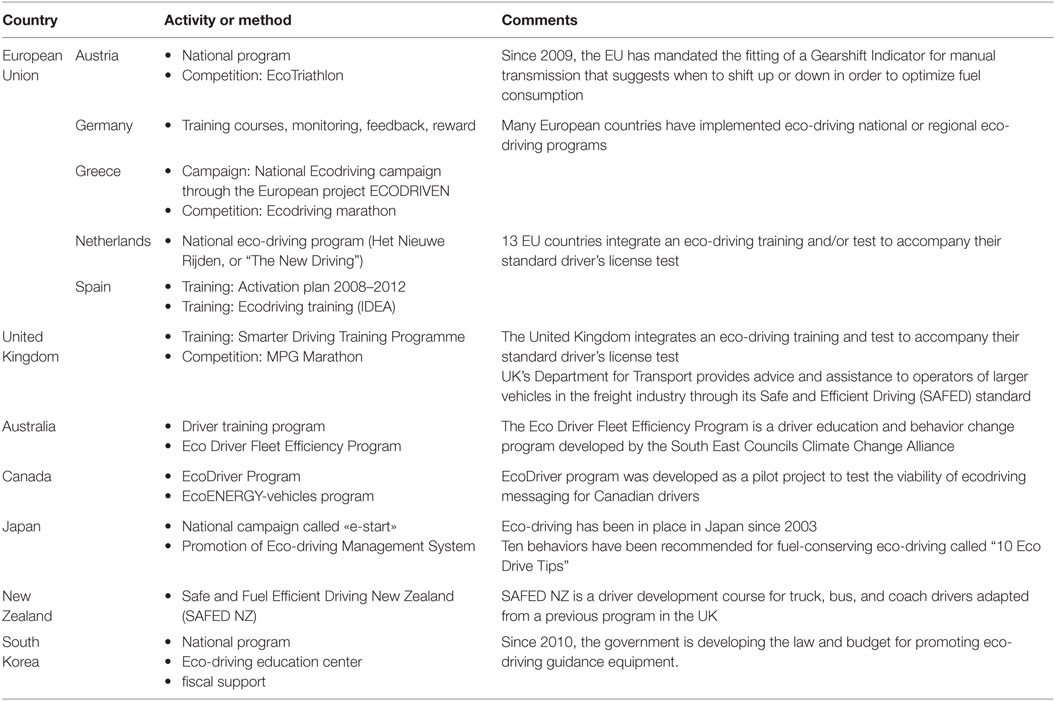
Table 2. The main ecodrive country program and initiatives.
Scientific Issues and Methodology
Research Question
Despite technological advances made in cars’ engines and especially in energy consumption, fuel consumption remains a considerable challenge in thermal cars. The adaptation of the existing system seems however difficult. According to Larsson and Ericsson (2009), the use of a resistant accelerator pedal beyond a certain level does not give any significant reduction of consumption. Also, many studies (Regan et al., 2006; Saint-Pierre and Ehrlich, 2008) show that the use of the Intelligent Speed Adaptation (Ericsson, 2001) does not bring any significant reduction of fuel consumption. Besides, a recent study (Azzi et al., 2011) has shown the effectiveness of visual and haptic assistance in eco-driving.
Many car manufacturers propose Ecological Driving Assistance System (EDAS). These assistance systems are mainly embedded devices aboard the vehicles that collect varied data from the driver’s behavior, the road, and/or the other vehicles. These systems use the whole information to analyze the driver’s behavior, in order to broadcast some crucial recommendations to foster self-learning in eco-driving. However, the use of these EDAS alone without motivation or sensitization does not provide any significant reduction of fuel consumption. The driving style and the driver behavior remain the important elements to be taken into account in the process of eco-driving (Ericsson, 2001).
In this context and in order to support the eco-driving training process, we have developed an approach that is based on the use of virtual reality and the serious game. The objective is to study the influence of a short training in eco-driving environment.
The scientific issues that are addressed in our approach are described below:
• To validate the effectiveness of a short training;
• To determine the effect of the guidance techniques on the behavior of eco-driving by using serious games;
• To quantify the economy observed in terms of CO2 emissions;
• To determine the relative contribution of each rule of eco-driving.
Proposed Methodology
Although this research is not related to the driving task, but the comprehension of this activity is essential in order to propose some guidance techniques with regard to respecting the multidimensional character of this task.
Driving is a complex activity; the driver must have a good reflex and makes the appropriate decisions in order to interpret one or more situations in an efficient way, which could change or degrade very quickly.
According to Michon (1985), the driving task is organized in three levels:
• The strategic level is the highest level of the hierarchy. The tasks in this level require a cognitive effort. However, the drivers are not subjected to strong temporal constraints (for example, determining destinations and waypoints).
• The tactical level is the middle level in which the drivers decide on the action to be taken within moments. At this point, the cognitive requirements are less important than the strategic level. In return, the activities carried out in this level are operated under a massive time pressure, for instance, the decision of overtaking another vehicle.
• The operational level is the lowest level of the hierarchy: steering, braking, accelerating, and monitoring the vehicle and roadway. The cognitive cost associated with this level is very low, but the temporal constraints are very strong.
The driving activity asks for a very high sensory implication level. The principal senses requested during the driving task are (Gruening et al., 1998; Kemeny and Panerai, 2003):
• The vision,
• The sound,
• The tactile, and
• The vestibular system.
The driving task is a particular task which requires from the drivers an extremely cognitive effort. Taking into account this characteristic in the design stage of eco-driving guidance techniques is essential for avoiding interferences between the messages that are naturally used by the driver during the driving task and the messages that they are possible to use in the guidance techniques. It is important not to overload the driver’s cognitive capacity, nor to disturb the driver for ensuring the good comprehension of these techniques.
Thus, it is necessary to propose the guidance techniques in a way of taking into account these following criteria:
• Interactivity,
• Comprehensibility, and
• Low cognitive load.
Thereafter, the guidance techniques will be developed according to cognitive criteria as well as eco-driving criteria. These rules are described in Table 3.
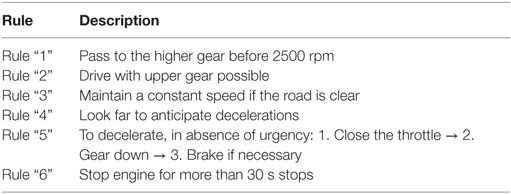
Table 3. Description of rules.
For each rule we propose visual and auditory interactive guidance (see Table 4).
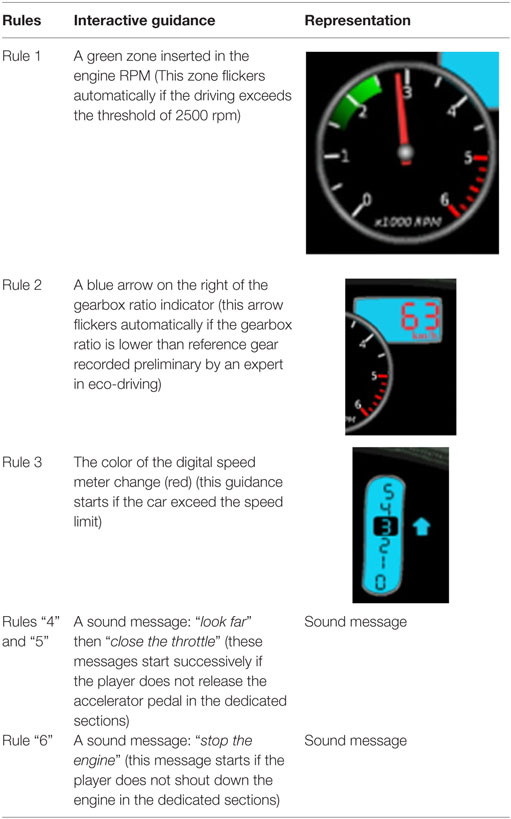
Table 4. Guidance suggested for each rules.
Moreover, an indicator permanently posts the CO2 emission level, and a visual message “increase your speed” appears in the center of the screen in blue at the beginning of the courses, if the player speed is lower than 10 km/h at the speed of reference recorded by an expert in eco-driving. The dashboard includes always at least the following elements: an engine RPM, a digital speed meter, a gearbox ratio indicator and a GPS (Figure 1).

Figure 1. Dashboard with visual guidance.
Hardware and Software Architecture
Hardware Configuration
The system realized is integrated into eco2 simulator. The hardware architecture is shown in Figure 2.
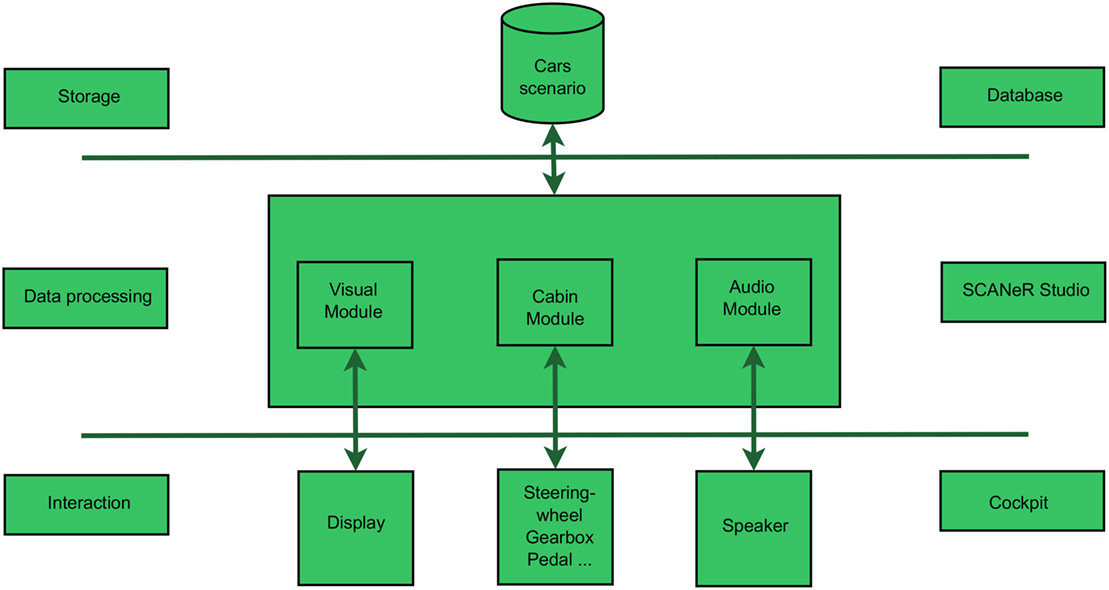
Figure 2. Eco2 architecture.
The eco2 simulator (Figure 3) is composed of the following components:
• An immersive visualization with three LCD monitors (32 inch diagonal, 100 degree field of view),
• Equipped cockpit,
• Adjustable seat, steering wheel, seat belt, manual gearshift, clutch, gas, and brake pedal assembly with force feedback,
• Audio speakers located in front and behind the seat,
• Vibrators embedded in the seat, and
• The simulator is powered by a HP Z600 Workstation with Quad-Core Xeon processors and NVIDIA Quadro cards.

Figure 3. Eco2 simulator.
Software Architecture
SCANeR II is a driving simulation system designed by Renault and published by Oktal. The product is based on OpenSceneGraph and is intended for automobile engineering. The main components in SCANeR II are (Oktal, 2016) as follows:
• Models: dynamic vehicle, autonomous traffic, pedestrians, scripting.
• Restitutors: visual, sound, dynamic platform.
• Acquisitions: virtual or real pilot, tracking systems, physiological data.
The software is used around the operational processes of driving simulators, structured around five dedicated modes of the graphic interface (Oktal, 2016):
• Terrain mode: road network creator RoadXML allowing the rapid creation of realistic road networks-useable directly in the simulation.
• Vehicle mode: tool for the fine-tuning and study of dynamic models.
• Scenario mode: driving simulator scenario editing tool.
• Simulation mode: simulation supervision tool.
• Analysis mode: detailed graphical analysis tool.
For the development of our guidance techniques, we have used SCANER development kit (SDK) that gives the possibility to enriching the system. We have developed modules and plugins (in C++ language) to integrate our guidance techniques and manage the serious game (Figure 4):
• Administrator: graphical user interface used to manage the serious game (player, scenario, scoring, etc.),
• Datarecorder: module used to recover data during the simulation,
• Eco Sound: module used to integrate the sound guidance,
• Eco Haptics: module used to integrate the vibratory feedback,
• Scoring modulates: used to ensure player evaluation and scoring,
• Visual: used to integrate visual guidance,
• Scenario: used to edit and configure the simulation scenarios, and
• Genericcab: used to reproduce the simulator cabin (pedals, clutch, buttons, etc.).
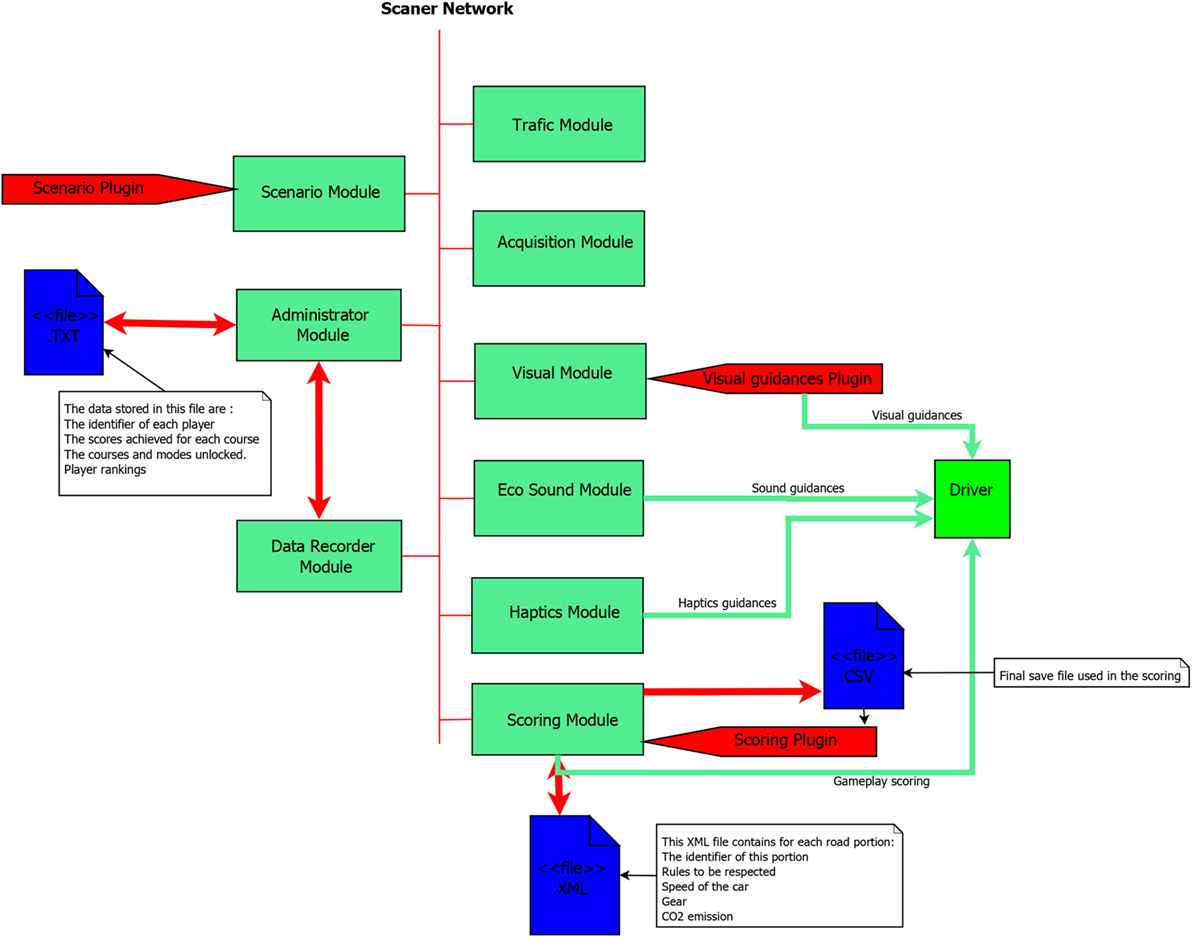
Figure 4. Guidance restitution architecture.
The Game Play «Taxi»
Players have only a limited time to achieve a particular mission: transport a customer to a meeting within a limited time by minimizing the CO2 emissions. If the player does not arrive to his destination at time, he loses the game. At the end of the course, a debriefing with the detail of its consumption is presented to him/her.
This mode introduces to the players the eco-driving gestures in a progressive way. We have used a series of increasing levels of difficulty. To go ahead in the game, the player must reach a specific score calculated from his CO2 emissions. If this score is not reached, the option of retry is given to him. To put into practice each gesture, we have used also some disturbing events on the road like pedestrians or bad drivers. These disturbed events are constant along the course. Each level is preceded by a briefing (which consists of a video) explaining the gestures to be adopted and followed by a debriefing with its total score. As a result, these steps of process enable to evaluate which rules are appropriate and which are not. Finally, in order to improve his/her driving behavior we propose some council.
This game play is proposed to evaluate the players’ behavior. It is necessary to recover some data in real-time. These data are:
• The general score corresponding to the CO2 emission,
• Rule 1: average engine speed at the time of the gearbox ratio rising passages,
• Rule 2: average difference between the engaged gearbox ratio and the reference gear recorded by the eco-driving expert,
• Rule 3: SD of the speed variation on the dedicated sections,
• Rules “4” and “5”: average position of the gas pedal on the dedicated sections, and
• Rule “6”: engine stopped or not on the dedicated sections (score 0 or 1).
Moreover, a malus system was introduced to evaluate the potential dangerous driving. Also a CO2 emissions penalization has been applied to the total score when driver disobeying traffic laws or control signs (e.g., unsafe passing, tailgating, failing to yield, running red lights or stop signs, etc.).
Experimental Studies
Participants
A total of 72 drivers took part in the study (3 groups of 24 drivers), 45 men and 27 women, aged between 19 and 55 years (the mean age is 24 years). They have had their driving licenses for at least 1 year (36 years to the maximum and 5 years as average) and they drive an average of 9000 km per year. The participants were randomly assigned to one of the three groups. They were all remunerated for their participation (10 Euros or a USB key). The sample includes students (in majority) and non-students (parents, personnel of the university).
Ethical approval was waived because the study subjects’ identifiers were not used and the study protocol was not deemed to represent epidemiological or biomedical research. We made every effort to comply with data protection rules. Study participation was voluntary and will not induce any risk of distress or injury, physical or psychological to the subjects. All participants signed an informed consent form before entering the study. In the cover letter accompanying the questionnaire, it was made clear that participation was on a voluntary basis and that the results would be used for research purposes only.
Experimental Conditions
During the experiment, three groups were examined (see Table 5):
• G1 “Normal group”: with lessons and guidance (24 drivers):
This group benefited from two theoretical trainings lessons as a video in which an expert explains the eco-driving rules and the guidance associated for each rule. Then, the participants performed immediately a drive session in the simulator with the presence of the rules (which are already explained in the theoretical lesson).
○ In lesson 1, the expert explains to the drivers rules 1, 2, and 3 with their guidance. This lesson lasted about 1 m 43 s and the following drive phase lasted about 8 min.
○ In lesson 2, the expert explains another group of rules “4,” “5,” and “6,” This lesson lasted about 2 m 10 s and the following drive phase lasted about 10 min.
• G2 “Group control 1”: with lessons and without guidance (24 drivers)
This group benefited only from the theoretical lessons without the eco-driving guidance in the drive phase.
• G3 “Group control 2”: without lesson and guidance (24 drivers)
The group control 2 is a reference group, i.e., they did not receive any instruction and any guidance during the drive phase.

Table 5. Experimental design.
We have considered it unnecessary to add another group without lesson but with guidance because the comprehension of this guidance requires to know their associated rules.
The routes are designed to be coherent with the targeted rules and the evaluation courses, with respect to the requirements of the training courses to allow an evaluation of the rules.
Comparisons carried out between the courses of initial evaluation and final evaluation must respect two important points:
• First, the results should not be biased by the intrinsic characteristics of the courses: for example, a course in heavy traffic shows a high level of CO2 emissions. An obvious solution to this problem is the use of identical courses. But this solution is not scientifically valid.
• Second, the familiarity with the course; a familiar course for example makes it possible to anticipate more easily, which has an effect on the CO2 emissions.
A solution to solve the problem partially is to build courses which are as similar as possible (same distance, same turns number, same stops number, etc.). A counterbalancing system is used: for half of the participants on each experimental group, courses used for the initial evaluation and the final evaluation were inverted (Figure 5). This system enabled us to prevent results skewing (effect of the intrinsic differences of the courses and effect familiarity with the course).
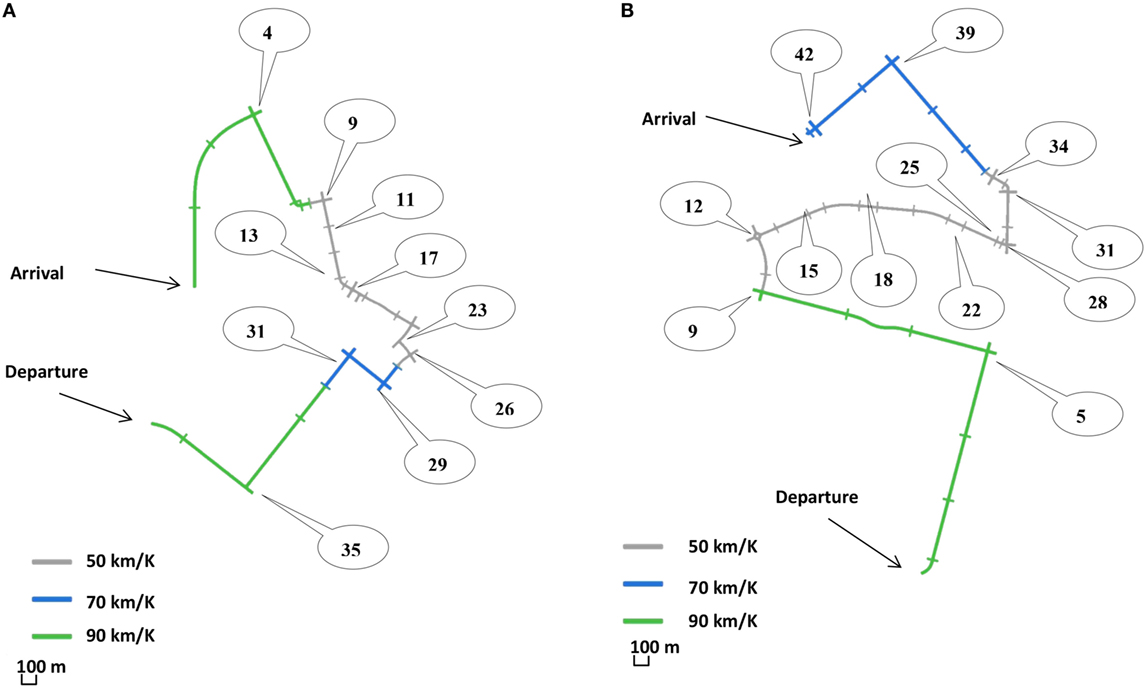
Figure 5. Example of course, (A) first training (B) initial course (the callouts represent the road portion number).
Results and Discussion
The primary goal of this study is to validate the effectiveness of a short training in eco-driving. To be able to validate the effectiveness of this training it is necessary that the level of CO2 emission observed in the final course is lower than the level of CO2 emission in the initial evaluation.
CO2 Emission
The analysis performed on the CO2 emission with an ANOVA. We noted a significant reduction in terms of CO2 emission between the initial course and the final course (Figure 6), F(1,69) = 30.7, p < 0.0001. The interaction between the factor groups and the factor course (Scenario × Group) revealed a reliable interaction, F(3, 69) = 8.54, p < 0.001.
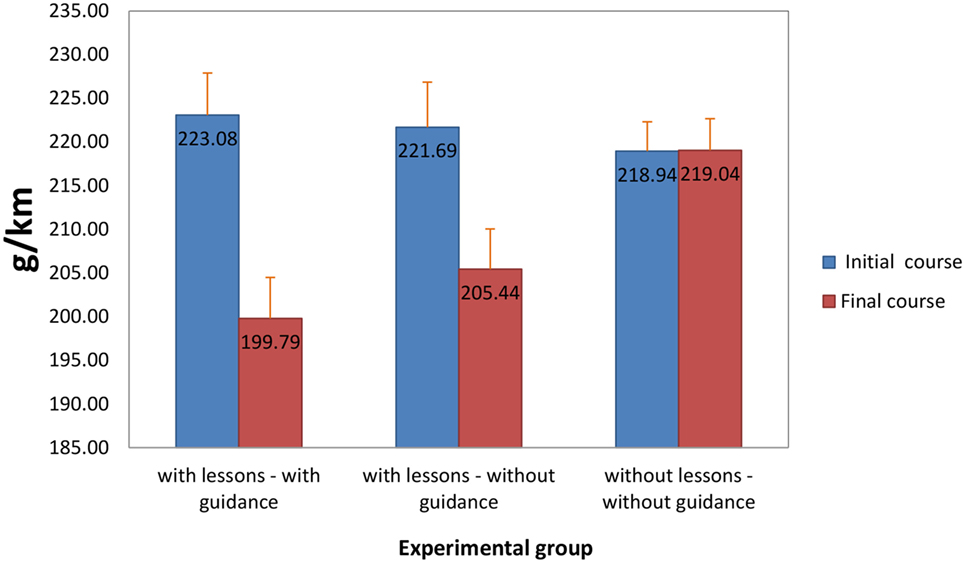
Figure 6. Mean and SD of CO2 emissions for initial (blue) and final (red) courses in grams per kilometer.
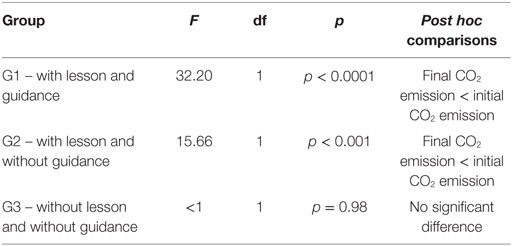
Post hoc testing (initial vs. final), reveals a:
• Significant difference (reduction) at the group with lesson and guidance [F(1, 69) = 32.20, p < 0.0001].
• Significant difference at the group with lesson and without guidance [F(1,69) = 15.66, p < 0.001].
• No significant difference was found in the third group [F(1,69) < 1, p = 0.98].
Post hoc testing (G1 vs. G2 vs. G3), reveals a:
• significant difference in CO2 emission on the final course F(2,69) = 5.21, p = 0.007 and
• no significant difference was found in CO2 emission on the initial course F(2,69) = 0.21, p = 0.80.
Game Scores
The comparisons of the scores obtained between the “initial” and “final courses” show that all the rules are generally assimilated, except for the rule 2; the players did not really use the highest gear (see Table 6).
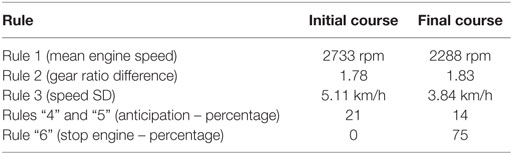
Table 6. Comparisons of the scores obtained between the “initial” and “final courses” for the G1 “Normal group.”
Detailed statistical analyses (linear regression) allow determining the relative contribution for each rule. Two important conclusions can be stated:
• Rules 4 and 5 are the rules that seem to contribute more to the economy realized in terms of CO2.
• The contribution of all the other rules seems to be low.
Discussion
CO2 Emission
The results showed a significant decrease of 10% in CO2 emissions in G1, and of 7% in G2. This indicates that interactive guidance systems help player to integrate focused eco-driving rules. In G3, no decrease is noticed, which indicates that differences noticed are indeed due to integration of eco-driving rules.
Relative Contribution for Each Rule
Some observations can be made to try to clarify these results, particularly about rule 1. The eco-driving rules used in our serious game are selected and formulated to be easily understood, memorable and applicable. Consequently, they necessarily include some simplifications. “Rule 1: pass to the higher gearbox ratio before 2500 rpm,” is a simplified version of the following original rule: “To pass a high gearbox ratio with approximately 2000 rpm in diesel and 2400 rpm in gasoline.” The car used in the training is a gasoline car. However, in the final course majority of the players change gear: between 1800 and 2200 rpm (for example, more than third of the players of group “Normal”). For these players, rule 1 would be counterproductive.
Conclusion
In this paper, we have showed the results of an experimental study which tried to validate a new approach allowing the use of serious game to help the drivers to adopt an ecological driving in order to reduce the CO2 emissions.
The results obtained show a significant reduction in CO2 emissions level:
• 10% for the Normal group (with lessons and with guidance).
• We observed also a low reduction (7%) in the group with lessons and without guidance.
This shows that interactive guidance helps the driver to integrate the eco-driving rules. Lastly, we do not observe any significant difference for the group without lessons and without guidance, which shows that the differences obtained in the other groups are due to the integration of the eco-driving rules (and not to a possible familiarity with simulator).
Author Contributions
HH, FM, SB, JB, FC, and AK: developed the concept. HH, FM, JV, and AK: technical support and developed the guidance techniques. SB, JB, and FC: designed and performed experiments. SB, JB, FC, HH, and FM: analyzed the data. HH and FM: wrote the paper.
Conflict of Interest Statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
Abuzo, A. A., and Muromachi, Y. (2011). The effect of ecodrive program on driving behavior and fuel economy of passenger cars in Tokyo. J. East. Asia Soc. Transp. Stud. 9, 858–871. doi:10.11175/easts.9.858
af Wåhlberg, A. E. (2007). Long-term effects of training in economical driving: fuel consumption, accidents, driver acceleration behavior and technical feedback. Int. J. Ind. Ergon. 37, 333–343. doi:10.1016/j.ergon.2006.12.003
Azzi, S., Reymond, G., Mérienne, F., and Kemeny, A. (2011). Eco-driving performance assessment with in-car visual and haptic feedback assistance. J. Comput. Inform. Sci. Eng. 11, 041005–041005. doi:10.1115/1.3622753
Barbé, J., Boy, G., and Sans, M. (2007). GERICO: a human centred eco-driving system. IFAC Proc. 40, 292–297. doi:10.3182/20070904-3-KR-2922.00051
Barkenbus, J. N. (2010). Eco-driving: an overlooked climate change initiative. Energy Policy 38, 762–769. doi:10.1016/j.enpol.2009.10.021
Barth, M., and Boriboonsomsin, K. (2009). Energy and emissions impacts of a freeway-based dynamic eco-driving system. Transport Res. D-Tr. E. 14, 400–410. doi:10.1016/j.trd.2009.01.004
Beloufa, S., Cauchard, F., Benjamin, V., Vedrenne, J., Boucheix, J.-M., Kemeny, A., et al. (2012). “Enhanced game mode for eco-driving simulator,” in Driving Simulation Conference (Paris, France).
Beusen, B., Broekx, S., Denys, T., Beckx, C., Degraeuwe, B., Gijsbers, M., et al. (2009). Sing on-board logging devices to study the longer-term impact of an eco-driving course. Transp. Res. D Transp. Environ. 14, 514–520. doi:10.1016/j.trd.2009.05.009
Beusen, B., and Denys, T. (2008). Long-term effect of eco-driving education on fuel consumption using an on-board logging device, URBAN TRANSPORT XIV – urban transport and the environment in the 21st Century. WIT Trans. Built Environ. 101, 395–403. doi:10.2495/UT080391
Boocock, J. R., and Coyle, M. (2003). Report on the Development of the Safe and Fuel Efficient Driving Standard (SAFED). West Yorkshire, England: University of Huddersfield: Department of Transport and Logistics.
Bozicnik, S., and Hanzic, K. (2009). Soft measures for sustainable road transport. Baltic Trans. J. 50–51.
De Vlieger, I., and Kretzschmar, J. (2000). Environmental effects of driving behavior and congestion related to passenger cars. Atmos. Environ. 34, 4649–4655. doi:10.1016/S1352-2310(00)00217-X
De Winter, J., Van Leuween, P., and Happee, P. (2012). “Advantages and disadvantages of driving simulators: a discussion,” in Proceedings of Measuring Behavior (Citeseer), 47–50. Available at: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.388.1603&rep=rep1&type=pdf#page=47
Ericsson, E. (2001). Independent driving pattern factors and their influence on fuel-use and exhaust emission factors. Transp. Res. D Trans. Environ. 6, 325–345. doi:10.1016/S1361-9209(01)00003-7
Evans, L. (1979). Driver behaviour effects on fuel consumption in urban driving. Hum. Factors 21, 389–398.
Greene, D. L. (1986). Driver Energy Conservation Awareness Training: Review & Recommendations for a National Program (ORNL/TM-9897). Available at: http://www.osti.gov/scitech/servlets/purl/5732393
Gruening, J., Bernard, J., Clover, C., and Hoffmeister, K. (1998). “Driving simulation.” in SAE Technical Paper Series. SAE International.
Hitchings, M. A., and Ward, T. (2010). CERA week: transportation/fuel trends and beyond. Global Refin. Fuels Today 2, 10.
Holcim. (2005). “Diesel club – one possible measure – aim to reduce fuel consumption and CO2 emissions by 5%,” in Presentation to a Logistics Forum (Antwerp).
Hooker, J. N. (1988). Optimal driving for single-vehicle fuel economy. Transp. Res. 22, 183–201. doi:10.1016/0191-2607(88)90036-2
Hornung, D., Stiefel, A., Stampfli, M., and von Hebenstreit, B. (2000). “Evaluation of the eco-drive courses,” in Response to a Commission from the Federal Office of Energy (German) (Bern). (BBL No. 905.527 d).
IAE. (2015). CO2 Emissions from Fuel Combustion Highlights, 2015 Edn. Paris: International Energy Agency. Available at: https://www.iea.org/publications/freepublications/publication/CO2EmissionsFromFuelCombustionHighlights2015.pdf
Katayama, H., and Taniguchi, M. (2005). A study on practical training system for energy conservational drives. Proc. Soc. Automot. Eng. Japan 20, 80–85. doi:10.4271/2005-08-0383
Kemeny, A., and Panerai, F. (2003). Evaluating perception in driving simulation experiments. Trends Cogn. Sci. 7, 31–37. doi:10.1016/S1364-6613(02)00011-6
Kolman, D. A. (2009). Eco-driving: simple techniques for operational savings. Refrigerated Transporter 22–23. Available at: http://refrigeratedtransporter.com/vehicles/eco-driving-simple-techniques-operational-savings
Larsson, H., and Ericsson, E. (2009). The effects of an acceleration advisory tool in vehicles for reduced fuel consumption and emissions. Transp. Res. D Transp. Environ. 14, 141–146. doi:10.1016/j.trd.2008.11.004
Mele, J. (2008). Eco-Driving Tips Offer Fuel Savings. Available at: http://Fleetowner.com
Michael, D. R., and Chen, S. L. (2005). Serious Games: Games That Educate, Train, and Inform. Boston: Thomson Course Technology. Available at: http://trove.nla.gov.au/work/20014497
Michon, J. A. (1985). “A critical view of driver behavior models: what do we know, what should we do?,” in Human Behavior and Traffic Safety, eds L. Evans and R. C. Schwing (US: Springer), 485–524. Available at: http://link.springer.com/chapter/10.1007/978-1-4613-2173-6_19
Miyasaka, T., Taniguchi, M., and Sambuichi, H. (2005). “Potentiality of effects by fuel conservation driving in automatic transmission car,” in Society of Automotive Engineers of Japan (JSAE), 13–16.
Oktal. (2016). Oktal. Available at: http://www.oktal.fr/en/automotive/range-of-simulators/software
Onoda, T. (2009). IEA policies – G8 recommendations and an afterwards. Energy Policy 37, 3822–3831. doi:10.1016/j.enpol.2009.07.021
Prensky, M. (2002). The motivation of gameplay: the real twenty-first century learning revolution. Horiz. Strategic Plann. Resour. Educ. Prof. 10, 5–11. doi:10.1108/10748120210431349
Regan, M. A., Triggs, T. J., Young, K. L., Tomasevic, N., Mitsopoulos, E., Stephan, K., et al. (2006). On-Road Evaluation of Intelligent Speed Adaptation, Following Distance Warning and Seatbelt Reminder Systems: Final Results of the TAC SafeCar Project. Available at: http://trid.trb.org/view.aspx?id=805773
Rowson, J., and Young, J. (2011). Cabbies Costs and Climate Change, an Engaged Approach to Fuel Efficient Behaviour. London: RSA (Royal Society for the encouragement of Arts, Manufactures and Commerce).
SAFED. (2007). Save and Fuel Efficient Driving. Available at: http://www.safed.org.uk
Saint-Pierre, G., and Ehrlich, J. (2008). “Impact of intelligent speed adaptation systems on fuel consumption and driver behaviour,” in Proceedings of the 15th ITS World Congress. New York: ITS America, ITS Japan, ERTICO.
Slob, J. J. (2008). State-of-the-Art Driving Simulators, a Literature Survey. DCT Report. 107. Eindhoven University of Technology.
Susi, T., Johannesson, M., and Backlund, P. (2007). Serious Games: An Overview. Institutionen för kommunikation och information.
Taniguchi, M., Kasai, J., and Sambuichi, H. (2006). “A study on the fuel consumption for driving at vehicle starting under energy saving drives,” in Proceedings of the Society of Automotive Engineers of Japan (JSAE) (Yokohama), 26.
Treatise. (2005). Ecodriving: Smart, Efficient Driving Techniques. London: Energy Saving Trust. Available at: www.treatise.eu.com
Ukita, M., and Shirota, H. (2003). Study on the effect of eco-driving by equipping with fuel consumption meter. Proc. Annu. Meet. Environ. Syst. Res. 31, 413–419.
Walden, J. (2008). Economy Drive. Available at: www.accountancyage.com/insider
Wengraf, I. (2012). Easy on the Gas – The Effectiveness of Eco-Driving. London: Royal Automobile Club Foundation for Motoring.
Keywords: serious games, driving simulation, eco-driving, interactive guidance metaphors
Citation: Hrimech H, Beloufa S, Merienne F, Boucheix JM, Cauchard F, Vedrenne J and Kemey A (2016) The Effects of the Use of Serious Game in Eco-Driving Training. Front. ICT 3:22. doi: 10.3389/fict.2016.00022
Received: 01 June 2016; Accepted: 06 October 2016;
Published: 27 October 2016
Edited by:
John Quarles, University of Texas at San Antonio, USAReviewed by:
Kyle John Johnsen, University of Georgia, USAYiorgos L. Chrysanthou, University of Cyprus, Cyprus
Copyright: © 2016 Hrimech, Beloufa, Merienne, Boucheix, Cauchard, Vedrenne and Kemey. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) or licensor are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hamid Hrimech, aGFtaWQuaHJpbWVjaEB1aHAuYWMubWE=