 Daniel Wesemeyer
Daniel Wesemeyer Michael Ortgiese1,2
Michael Ortgiese1,2 Sten Ruppe
Sten Ruppe- 1German Aerospace Center (DLR), Institute of Transport Systems, Berlin, Germany
- 2Institute of Land and Sea Transport, TU Berlin, Berlin, Germany
The advent of connected automated vehicles (CAVs) will introduce new possibilities for traffic management as it provides a wide variety of data that can be used by traffic network and fleet operators. Much of this data will be generated passively by vehicles and the infrastructure and exchanged between stations via wireless communication, i.e., Vehicle-to-Everything (V2X). This paper introduces a V2X-based traffic management approach based on slot management for vehicles. These slots are used to control the route choice and trajectory planning of CAVs over multiple organizational levels. After introducing the central principles that the management system model is based on, we test two lane change approaches for CAVs in order to derive rules for generating and controlling slots. A basic set of rules was defined that foremost resulted from evaluating the lane change behaviour of CAVs. The evaluation of the lane changes shows that omitting deviations in the driving behaviour of CAVs yields non-optimal results concerning traffic flow parameters, especially under highly congested conditions. Future research should investigate the effects of the slot-based approach in a more complex scenario.
1 Introduction
The mitigation of external effects is an important goal in transport management. Given the past and current trends, the need for action especially in road transport is even more pressing. As of today, transport in Europe is the source of one-fourth of all Greenhouse Gas Emissions (GHG) (1990: 14.8%). Technological improvements, including the introduction of more efficient engines and fuels, were compensated by the rapid growth of traffic. About 76% of GHG (1990: 74.8%) attributed to the transport sector are emitted by road transport (EC and DG MOVE, 2023). Contemporary management and control methods introduced in urban areas that mitigate the negative effects of traffic are often localised at intersections or corridors spanning multiple intersections. The improvements in isolated areas often induce more traffic or lead to disturbances at its boundaries since the non-managed infrastructure installations provide lower capacities.
However, with growing connectivity and automation in road transport, new possibilities for management and control instances arise that can support the network-wide reduction of negative impacts of vehicular traffic. Many new control technologies like cooperative adaptive cruise control (CACC) have been assessed regarding their impacts on traffic flow, air pollution, and energy consumption, e.g., by Makridis et al. (2018). Since the introduction of connected, automated vehicles (CAVs) into the market will happen gradually, mixed-autonomy scenarios like in Zhang and Cassandras (2019), Avedisov et al. (2022), regarding the benefits and problems resulting from the interaction of conventional vehicles and CAVs, are particularly interesting. At the same time, projects and partnerships like the European CCAM partnership1 or the US CARMA project2 aim at implementing techniques and methods enabling connected, cooperative and automated mobility (CCAM) on test tracks, eventually leading to a real-world operating automated mobility.
Our paper introduces a novel approach to efficiently control vehicles, even in mixed-autonomy conditions, by applying a slot-based traffic control scheme. Slots are, in the context of this paper, an exclusive right of use for the physical road space a vehicle requires for its presence and movement within a defined horizon. The approach utilizes Vehicle-to-Everything (V2X) to manage the movement of vehicle fleets of automated vehicles on road segments. Slot-based traffic control is a relatively simple solution to enforce capacity limits on specific segments of a traffic network and to apply various possible control methods such as green light coordination, or preemption of emergency services without the need to implement additional infrastructure - apart from Intelligent Transport System (ITS) infrastructure. By including stationary detection (induction loops, cameras, etc.), even non-connected lc!s (lc!s) could be included into the system. The aim of this study is to elaborate on the concept of road traffic slots and to derive rules for the generation of slots based on driving and lane change behaviour of CAVs.
The rest of the paper is structured as follows: First, the existing literature concerning slot-based traffic control and maneuver coordination of CAVs is presented in Section 2. Section 3 further elaborates on the definition of vehicle-centered road traffic slots. The explanation includes the scope of a road traffic slot, and the control heuristics used to organize the slot movement and interactions. Afterwards, Section 4 presents the simulation experiment and the proposed methodology. In the following Section 5 we will show the results of our simulation study to assess the effects of the road traffic slot control on various traffic flow parameters. The paper concludes with Section 6 in which we draw our conclusions and give an outlook.
2 Literature review
Slot-based traffic control is a concept that introduces a spatial and temporal segmentation of the available transport infrastructure. Its aim is to ensure an efficient and safe traffic operation, even under heavily congested traffic conditions. The concept of slots has been widely adapted in air and railway transport.
The implementation of air traffic management slots is an approach to manage scarce transport infrastructure at airports in order to sustain efficient air transport operation and reduce delays. The Airports Council International (ACI), the International Air Transport Association (IATA), and the Worldwide Airport Coordinators Group (WACG) have defined a set of rules under which an appointed coordinator allocates the available airport capacity to optimize benefits for all stakeholders (airlines and other aircraft operators, airport management body, air traffic control authorities, customers). The need for coordination, i.e., slot management, is only given if the airport infrastructure is insufficient, or if government regulations make it impossible to meet the traffic demand. A slot in the sense of air traffic management is a permission given by a coordinator for a planned operation to use the full range of airport infrastructure necessary to arrive or depart (Airports Council International, International Air Transport Association, and Worldwide Airport Coordinators Group, 2022).
Figure 1 shows the planning process for a single flight between two coordinated airports. As we descend on the vertical axis, the flight schedule is refined, introducing taxi-in and taxi-out times (light purple) and delays introduced by the Air Traffic Flow Management (ATFM) that account for potential waiting times on airports. The need for coordination at airports poses the Slot Allocation Problem (SAP). This problem has been elaborated on under aspects of profit maximization of stakeholders by Day and White (1980) to the point of introducing an auctioning method of trading slots in Econ Inc. (1980). The latest work in this field of Vranas (1996), Ivanov et al. (2017) or Tian et al. (2021) focus primarily on methodology to solve the allocation problem more efficiently.
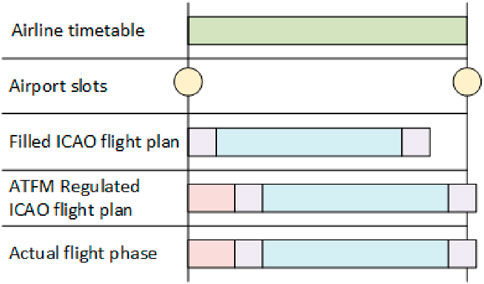
Figure 1. Exemplary flight planning timeline, adapted from (De Wandeler, 2014).
In railway transport, slots are used in the signalling block system to facilitate safe transport operation. Due to the fact that braking distances of trains may exceed the viewing range of the driver significantly, trains have to be controlled by trackside technology. There are three basic principles of separating trains as seen in Figure 2. The fixed block distance principle is the most common approach used in train separation due to some technological issues with the other two approaches. Because trains have to keep a gap of at least the absolute braking distance at e.g., interlocks and because the following train will collide with the leading train in case of an accident, the relative braking distance principle is not yet applied although it would provide the line with the highest capacity. The absolute braking distance principle cannot be applied to freight trains as no technology for checking train completeness exists until now (Pachl, 2021).
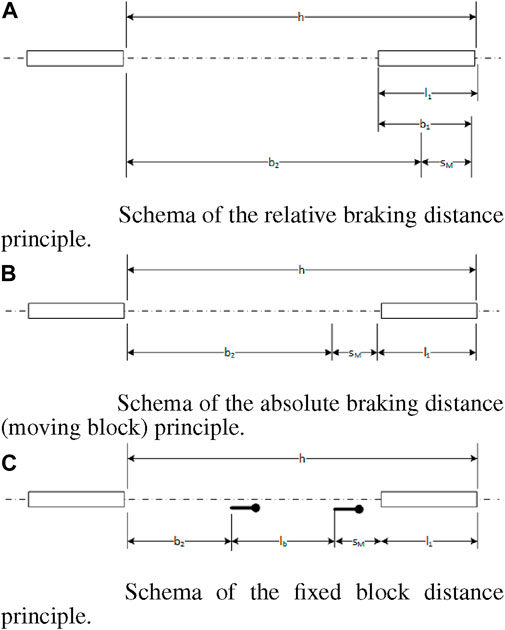
Figure 2. Overview of the principles of train separation. (A) Schema of the relative braking distance principle: The distance between two successive trains is the sum of the braking distances of train 1 and train 2
Access to the railway system is regulated and transport enterprises have to pay a net fee to the infrastructure operator for using the tracks and stations along their planned routes. Currently, railway infrastructure operation is typically separated from train operation since the once state-owned companies have been widely privatized. Generally, the railway infrastructure has open access for all train operators, yet the amount of money to pay for railway capacity and the pricing method have amongst others been addressed in Kennedy (1997) and Nilsson (1999). Schroeder et al. (2000) even took a slot-based view on the issue of railway capacity allocation, but with a stronger emphasis on revenue management than the actual allocation process.
There is no exact equivalent to a railway signalling block or an air traffic management slot in road traffic today. In terms of traffic safety, a separation of road space is not needed since all road vehicles are able to stop within the viewing range of the driver and drivers are able to communicate and coordinate their maneuvers. From an optimization perspective slots, or more generally road space reservation, are regarded as a feasible concept of organizing road traffic, as shown in a variety of academic concepts. Koolstra (1999) introduced the concept of slots in road traffic in a ramp metering approach on a motorway. He developed a pricing-based approach that balances the traffic demand to match the supply by regular price adaptations. Slot allocation on roads has been further researched in simulation studies, e.g., Marinescu et al. (2012). The possibilities of introducing slot allocation as a method of coordinating traffic streams at intersections was investigated by Tachet et al. (2016) and Chai et al. (2017). Nichting et al. (2020) introduced the Space Time Reservation Procedure (STRP) that relies on inter-vehicle cooperation and instantaneous reservation of road space needed for short-term driving maneuvers. This procedure was specifically designed for lane merge situations and intersection coordination scenarios. An approach that does not only serve coordination purposes but also introduces a capacity-wise regulation is described in Ruppe and Wesemeyer (2020). The slots are embedded in a management system that aims at optimally distributing vehicles on the road space available using a pricing scheme.
Summarizing, slots are at least implicitly used to ensure traffic safety in every transport system by reserving infrastructure space for a specific vehicle during a specific period of time. Especially in rail transport, the safety aspect of the slots is of major importance. Optimization purposes are also taken into account, meaning that the allocation method of slots should always yield to the best solution in the sense of an optimization criterion, e.g., delay time, or number of stops. The road sector, due to the comparably small space, also can make use of slots to coordinate single vehicle behavior. In railway and air transport operation, slots have been successfully used for decades. The usage of slots in road transport has only been studied and verified in simulations so far.
The effect of introducing CAVs, especially their potential impacts on traffic flow and the environment, are widely researched and discussed. For example, Li et al. (2024) investigated the impact of different penetration rates of CAVs on the mitigation of traffic waves showing that CACC and other methods can indeed stabilize the traffic flow to a certain degree. Regarding environmental impacts, Gemma et al. (2023) shows that GHG emissions can be significantly reduced by the introduction of CAVs in the traffic flow. Yet, this reduction cannot be observed in lower-congested situations since it is compensated by the improvement of the traffic flow. Another important field of research is traffic safety, especially addressing the complexity of integrating CAVs in the existing traffic system. Granà et al. (2024) found in a mixed-autonomy urban traffic scenario that the introduction of CAVs does not automatically lead to a higher traffic safety. Especially when CAVs follow legacy vehicles (LVs) in similar conditions, even more conflicts may arise.
3 Slot-based dynamic road traffic control
The following section elaborates on road traffic slots. The overall concept and functionalities of slots in terms of traffic and vehicle control are introduced, followed by the description of control heuristics used to move slots along network elements and how basic interaction between them is realized.
3.1 Concept and basic functions
In the context of this paper, a road traffic slot can be regarded as an exclusive right of use for a specific section of the traffic network during a specific period of time for a single traffic participant (vehicle). Slots are provided by a management system that supervises the entire road infrastructure of a municipality or a district as described in Wesemeyer and Ruppe (2020), which this paper will further elaborate on.
Fist, we need to motivate the scope of the term “user” in this paper. In the future connected and automated transport system, the usage of vehicles will change. Several studies, e.g., by Zhang and Cassandras (2019), Yang and Fisher (2021), Galich and Stark (2021), and Avedisov et al. (2022), indicate that the private ownership of cars does not necessarily have to decrease with increasing automation level. According to their findings, this is especially a question of the concrete implementation and how much automated driving will be regulated by the authorities. Zhang et al. (2018) provided an outlook on the implementation of ride-sharing services in an urban area that reduced private car ownership by 9.5%. In the remainder of our study, we discuss the system’s implementation in an urban area where many potential conflict areas between vehicles and also between different modes of transport exist. This may lead to more strict regulations of road traffic. At the same time, mobility services will probably be a major part of people’s everyday mobility. This leads to our definition of the term user as the CAVs of mobility service providers, public transport agencies, and of a small amount of private owners.
3.2 Management levels
The schematic of the slot-based traffic management is displayed in Figure 3. Users of the system are shown on the left hand side of the figure, the slot-based management system with its main components on the right hand side. The system is divided into a strategical and a tactical management level, a distinction we will motivate in the following paragraphs.

Figure 3. Schematic of the slot-based traffic management.
Requests for routes by traffic participants (e.g., public transport companies, logistics firms, or private traffic participants) from their respective start positions to their destinations are sent to the slot-based traffic management, providing either a specific departure time or a desired arrival time. These requests are received on the system’s side by a transceiver unit which forwards the relevant information to two entities on the strategical level: an aggregator combining single datasets to a global state representation, and an optimizer. The optimizer receives information of the current actual state (traffic demand, traffic density, emissions) and an optimal target state, constructed from predefined optimization goals. These goals are set by political stakeholders like municipalities, or traffic agencies. In the strategical management, these goals are integrated in a supply management entity that provides the goals to the optimizer. According to these goals, optimal route distributions are calculated for each incoming user request resulting in control measures like:
The resulting routes including the slots as driving permissions on the infrastructure are transmitted to the users. The slots are also transmitted to the tactical level of the management system, consisting solely of the slot management. Decisions regarding local speed limits, lane changes, maneuver coordination, or control measures like traffic light coordination are made.
The distinction between the strategical and the tactical management level is made because of the different requirements regarding the capability to operate in real-time on the respective horizons of the management levels. On the strategical level, measurements made and decisions taken affect all network elements and traffic participants during several hours up to 1 day. Constraints are set for the whole network by the management system and the infrastructure operator. These constraints include among others:
The tactical management level, on the other hand, handles slot movements by providing trajectories. These specify the longitudinal and lateral slot movement on a specific, spatially limited section of a road during a planning horizon of under a second up to several minutes. The dimensions in which slot movement can be influenced are:
Due to the very short update cycles on the tactical management level, an integrated solution of both strategical and tactical system functions could probably not ensure real-time operability under all traffic conditions. The strategical functions could indeed be implemented as a centralized functionality, but the tactical management should be implemented in decentralized units planning the slot movements either on small snippets of the network or single network elements like edges or intersections.
The dissemination of these information shall be realized via V2X since the low latencies of Vehicle Ad-Hoc Networks (VANETs) and already existing standards in the Cooperative Intelligent Transportation System (C-ITS) domain cover most of the use cases that could occur in this system. The actual use of V2X is merely implied in the present paper, since it focuses more on the control techniques of slots and their merits towards traffic flow parameters. Yet, some of the already existing V2X standard messages that could be utilized to realize the tactical level control are shown in Table 1.
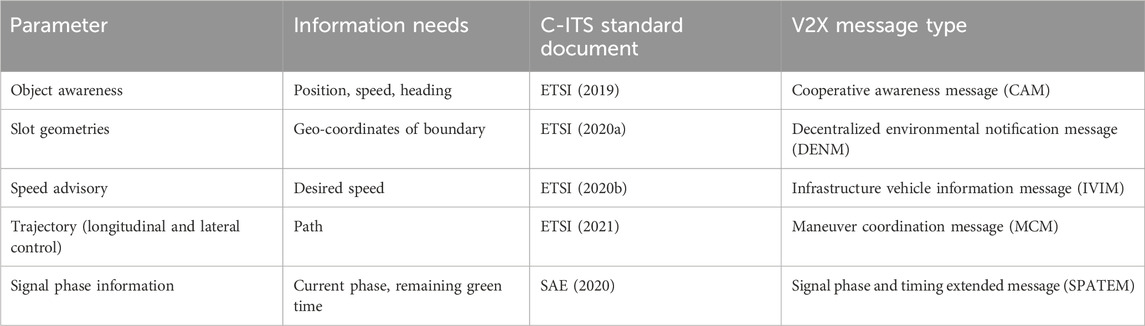
Table 1. Usage of existing V2X standard messages in the slot-based management domain.
It is important to note that this system might not operate entirely with CAVs, but with mixed-autonomy traffic on the roads. Conventional vehicles need to be included by assigning slots to them. Since some of these LVs might not have the on-board technology that enables them to inform about their presence via V2Xs, they need to be detected by road-side sensors or by connected traffic participants and included into a Collective Perceptive Messages (CPMs), a dictionary of all detected objects inside a defined area.
Figure 4 depicts a special use case where a slot is purposefully left empty. This usage of slots would facilitate a green light coordination for the approaching vehicles or giving other vehicles the possibility to enter the respective slot when changing their lane or entering into traffic.

Figure 4. Schematic of road traffic slots.
3.3 Control heuristics
Since the aim of this paper is to derive rules for the generation of slots that are based on the driving behaviour of CAVs, a simple behavioural model for CAVs was developed. The incorporated control methods consist of one method to control the longitudinal movement of the slots and two methods for the lateral movement, i.e., lane changing. All of these methods only control the driving behaviour of CAVs on roads. This limitation was chosen in order to avoid the superposition of various influences on the relevant traffic flow parameters. The incorporation of control algorithms for use cases including other network objects, such as coordination of intersection crossings, or interactions between slots and traffic lights will be included into the model in future research.
Algorithm 1 displays the control method for accelerating and decelerating slots. The algorithm with an ego slot
Algorithm 1.Acceleration/deceleration method.
for all slots
if
end if
accelerate/decelerate slot
end for
In order to control the lane change behavior of the vehicle slots, two control heuristics are proposed. Both will be presented in more detail in the following section. Beforehand, the characteristics of lane changes will be outlined in order to motivate the proposed methods.
Whether or not a target vehicle is able to change the lane it is driving on depends on the relative distances, velocities and accelerations of surrounding vehicles. The relative velocities and accelerations should ideally be close to zero so that all vehicles involved in the lane change maneuver have fixed relative positions, whereas the relative distances of the target vehicle to other vehicles, especially on the target lane, should be equal to or greater than a defined minimum time gap. This minimum gap can only be achieved in an under-saturated traffic flow, as depicted in Figure 5 since either existing gaps have to be utilized to perform lane change maneuvers or the existing free space on the available lanes must allow for maneuvers that open up gaps.

Figure 5. Lane change maneuvers in an under-saturated traffic flow. For both lane change maneuvers, sufficient gaps exist and thus no cooperation between vehicles is needed.
As the traffic on a road segments becomes more dense (see Figure 6), the availability of acceptable gaps decreases. Up to a certain threshold, drivers accept smaller gaps for lane change maneuvers as long as traffic safety is still maintained. Due to little to none acceptable gaps that allow for lane changes, cooperation between drivers is required. Cooperation includes the awareness of desired lane changes by other vehicles and a consequential action, like decelerating in order to open up a new gap. The target state after opening gaps for the vehicles desiring to change their driving lanes corresponds to Figure 5.
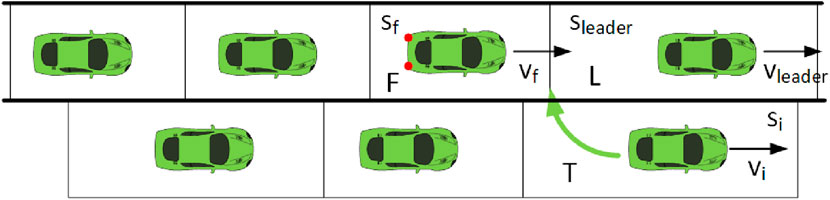
Figure 6. Lane change situation in an over-saturated traffic flow. In order for vehicle T to change to the left lane, vehicle F needs to reduce its speed.
The first lane change control heuristic is called “gap search.” On a two lane road, vehicles are driving on both the left and the right lane. For any reason, a target vehicle T on the right lane is instructed to change to the left lane. The algorithm would check for existing gaps on the target lane and propose a lane change maneuver that orders T to first decelerate. As soon as it is able to, the vehicle performs the lane change. A pseudo code of this heuristic is shown in Algorithm 2. It is important to note, that the variable
Algorithm 2.Heuristic of the gap search lane change control method.
for all slots
if
end if
end for
The second lane change control heuristic is called “follower gap.” It is a cooperative lane change approach that extends the gap search heuristic by including the follower vehicles on the left lane into the procedure. If a target vehicle (T) is instructed to change to a left lane and this lane is not sufficiently large to perform the maneuver, the following vehicle (F) gradually decelerates in order to widen the gap to its leader (L). As soon as the gap is large enough, T performs the lane change maneuver and F accelerates to its desired speed. The heuristic is shown in pseudo-algorithmic form in Algorithm 3.
Algorithm 3.Heuristic of the follower gap lane change control method.
for all slots
if
end if
if
else
end if
end for
4 Simulation study
In order to test the slot-based control approach presented in the previous section, the microscopic traffic flow simulation SUMO Lopez et al. (2018) was used. The main reason for using SUMO was that it includes the programming interface TraCI, that offers a broad variety of methods for interacting with simulation objects. The aim of the simulation and the analysis is to gain insights that help deduct rules for the construction and control of slots. This section of the paper presents the use case that was chosen to evaluate the control approach and elaborates on the used model and its parametrization.
The use case we chose for testing our slot-based control approach was an artificial lane change scenario. The simulation network consists of two edges, of which the first one has two lanes, narrowing to an edge with one lane after 750 m. The traffic demand

Figure 7. Schematic of the test use case for the slot-based control.
In order to accurately model the distinct behaviours of both LVs and CAVs, several model parameters of SUMO’s car following and lane change models have been adapted (see Table 2). For all vehicles, the SUMO Krauss car following model has been used. The first major difference lies in the “imperfection” of driving of both vehicle types, denominated as
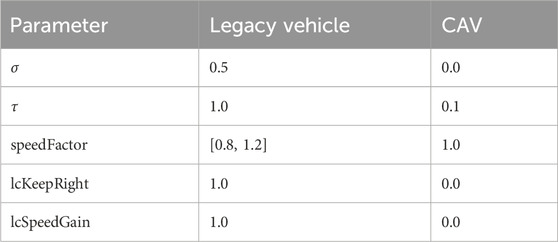
Table 2. SUMO car following and lane change model parameters adapted for the simulation runs.
The other two factors lcKeepRight and lcSpeedGain influence SUMO’s lane change model. lcKeepRight is the eagerness of vehicles to drive on the rightmost lane. In many countries, vehicles are encouraged to only use left lanes to overtake slower vehicles or for turning reasons, and after performing these actions immediately return to the right lane. lcSpeedGain is a factor that influences the eagerness of vehicles to switch to a left lane in order to drive faster than their leaders. Both parameters were turned off for CAVs since the lane change behaviour in the first place should be controlled by our heuristics, not the SUMO model.
It is important to note, that the parametrization of the CAVs is idealized. In reality, car manufacturers may model and parametrize the future automation functions of their vehicles differently to other manufacturers resulting in slight deviations concerning car following and lane change behavior. However, this matter will not be addressed in this study since it is not the primary focus.
Both lane change methods (gap search and follower gap) have been tested over various combinations of penetration rates for CAVs and traffic demand levels. These variations should show the merits of the respective control methods at certain traffic loads and under mixed-autonomy conditions. At a penetration rate of 0.0, all vehicles decide for themselves when they change the lane. This is regarded as the baseline scenario for our future analysis. Also, the simulations have been randomized over various random seeds in order to minimize statistical errors. A brief display of the used variables is shown in Table 3.

Table 3. Scenario variables and their value ranges.
5 Results
From the simulation results, several traffic flow parameters are analyzed in order to assess the effect of each control method compared to the self-organization of the vehicles in the baseline scenario. In particular, the average time losses of the vehicles, the leader gaps at the time the lane change maneuver took place, and the positions and momentary speeds of their lane change maneuvers will be analyzed as indicators of the effectiveness of each method.
Figure 8 shows the positions of the performed lane changes, on a grid organized by vehicle type and lane change method. The color of the cumulative distribution curves represents the penetration rate of CAVs. Regarding the LVs, the lane change behaviour is - as expected - similar in both lane change methods. Vehicles change their lanes over the whole length of the road, opening up gaps for each other. Yet, a slight shift of the proportions curve can be seen with increasing penetration rate, indicating that LVs also benefit from the lower road space consumption by CAVs. For the CAVs however, there are two completely different pictures. While the vehicles using the follower gap method can change their lanes fairly early on (90% of them changed the lane after roughly half the length of the road, at 100% penetration rate even at 200 m), the vehicles that used gap search are, especially at lower penetration rates, often not able to change to their target lane until the end of the road. Even if all vehicles are fully automated, the distribution curve indicates that around 2% of all vehicles cannot change to their target lane until then.
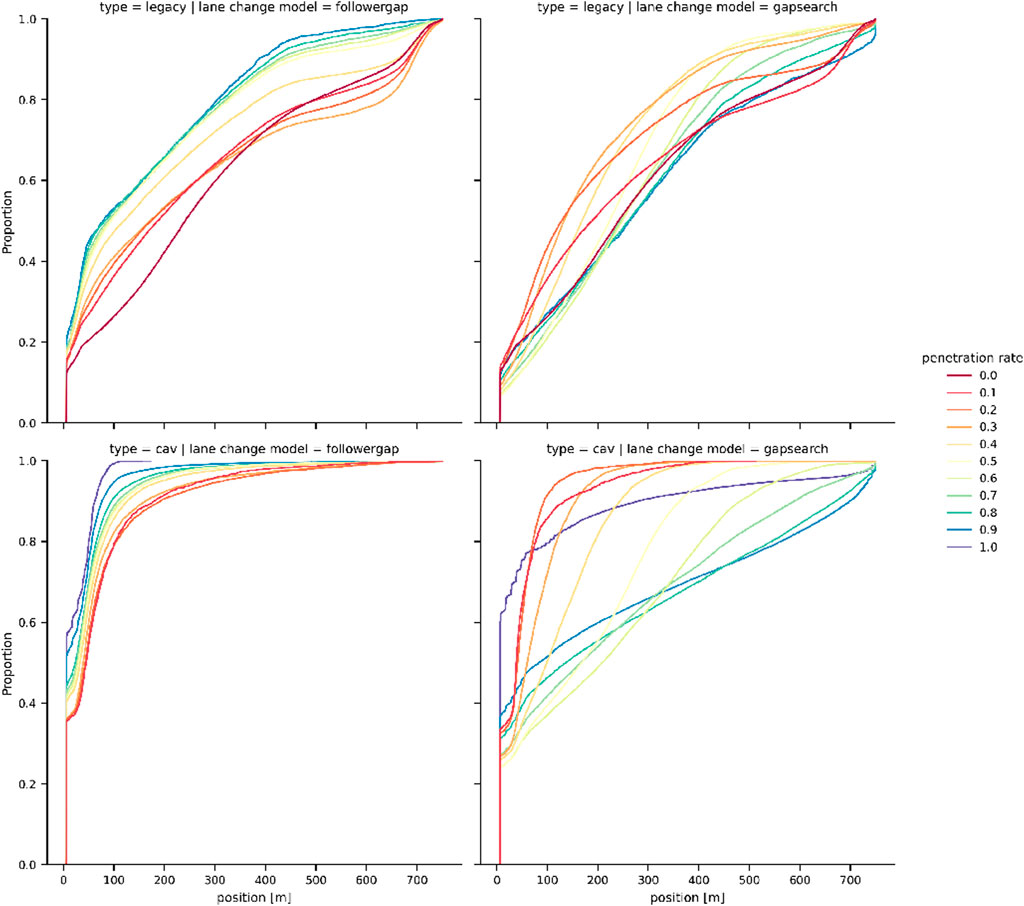
Figure 8. Distribution of lane change maneuvers over the length of the two lane road.
The average time losses of both control methods are depicted in the heatmaps in Figures 9, 10. The first row (penetration rate 0.0) of each figure depicts the baseline case with self-organizing lane change maneuvers of the LVs. The time losses grow rapidly with the traffic demand and thus the density of lane change maneuvers up to a maximum of 103.6 s for the baseline scenario. Regarding the gap search heuristic, the lane change method seems to work reasonably well at low penetration rates and under fully automated traffic conditions. Yet, for penetration rates between 40% and 90%, the algorithm under-performs at the lower penetration rate cases and eventually performs even worse than the baseline case under high traffic demand. This might be the result of a shortcoming of the algorithm that no gaps are actively created, but rather that vehicles search for already existing ones on the left lanes. If no acceptable gap could be found, the vehicles have to stop at the end of the lane and wait until a sufficient gap occurs in between the passing vehicles. The parametrization of the CAV driver model that omits imperfection also contributes to the relatively low performance of the lane change method. Due to no deviation in the behavior of the CAVs, only gaps that are equal to or larger than the minimum gap are accepted, whereas in reality drivers tend to accept smaller gaps if the traffic is more dense and the surrounding vehicles are slower. This problem was solved in the follower gap case, where time losses gradually descent with increasing penetration rate until a minimum of 0.6 s on average.
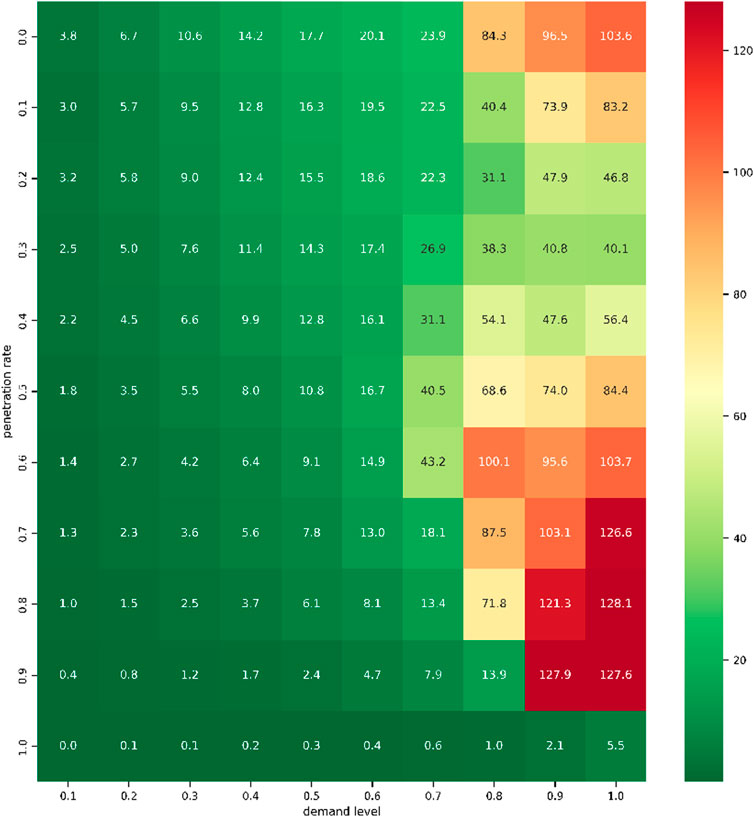
Figure 9. Heatmap of average time losses for the gap search method.
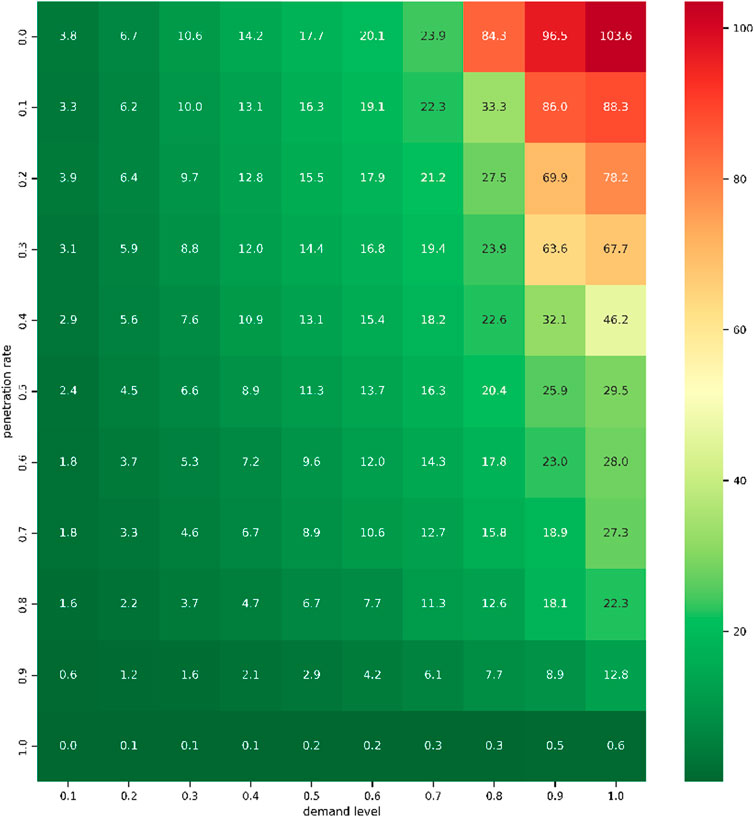
Figure 10. Heatmap of average time losses for the follower gap method.
This tendency can also be seen in Figure 11, where the average speeds of vehicles during their lane change maneuvers over the different penetration rates and lane change models is depicted. The colored bars reflect a specific combination of vehicle type and lane change maneuver. Included are only lane change maneuvers that aim at switching to the left lane in order to continue the trip, lane changes due to the keep right rule are omitted. In the base case, LVs can change to their target lane at speeds of around 10 m/s. With the gap search method, these speeds increase only for LVs, CAVs tend to change their lanes at lower speeds, meaning they have to decelerate for a longer time until they find an acceptable gap. At fully automated traffic conditions, the average speed drastically increases to almost 13 m/s. For the follower gap method, the speed gradually increases, as did the time loss and overall, LVs and CAVs both benefit from the traffic control measures.
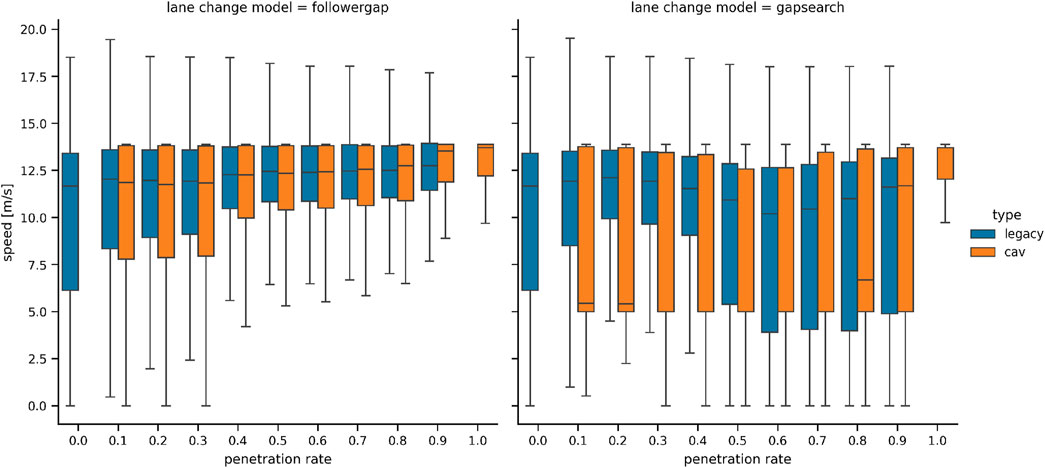
Figure 11. Speeds during lane change maneuvers for different lane change maneuvers, vehicle types and penetration rates.
The first major finding of the simulation results is that the parametrization of the car following and the lane change behaviour needs to be adapted. Especially in terms of the modelling of driver imperfection, the identification and slight variation of relevant CAVs model parameters needs to be taken into account. Especially when looking at the results for the gap search control method, high traffic densities lead to high time losses and delays during lane change maneuvers. Additionaly, the distribution of lane change maneuvers over a longer section of a road might be beneficial towards the reduction of traffic disturbances. Also, defining a target state regarding traffic density and speed may lead on a road may help to mitigate negative effects of high traffic demand. This means, the slot-based approach could be used as a ramp-metering approach upstream of highly congested roads or intersections.
6 Discussion
In this paper, we presented a slot-based traffic management approach for CAVs that utilizes V2X to organize the movement of slots, i.e., vehicles. The approach operates on two separate levels. A strategical level organizes the access of vehicles to the traffic network and distributes the traffic flows according to predefined optimization, a tactical level manages the small-scale movement of vehicles, including acceleration and deceleration, lane changing, and maneuver coordination. These are functions that CAVs normally perform themselves, yet an infrastructure-based service that assists especially in complex tasks like maneuver coordination might help reduce the amount of intelligence needed in every vehicle, reducing effort and costs for manufacturers. On the strategical level, municipalities or districts gain more control over the provision of their infrastructure. Through the slot-based management, access to the road network can easily be regulated, based on specific policies that should be realized. Combining this approach with distance-based dynamic pricing may also be a fairer approach towards user financing of road infrastructure than a flat tax.
The existence of sufficient gaps between CAVs mitigates disturbances in the traffic flow in a lane change scenario and facilitates lane change maneuvers. This leads to higher speeds during lane changing and reduced average time losses for all vehicles. Especially the follower gap control method could show the merits of CAVs regarding the reduction of disturbances on the traffic flow due to high traffic demand. Some of the improvements of the follower gap method might be related to the lower road space consumption of CAVs, but a major part of the resulting reductions in time losses is to be attributed to the cooperative lane changing. This assumption is based on the fact that in the gap search scenario, where vehicles had to search for existing gaps instead of cooperating with the rest of the traffic, the time loss reduction was significantly lower. Interestingly, CAVs and LVs both benefit from the reduced space consumption and intensified cooperation of the connected traffic participants.
For the creation and the design of slots, the results imply that an overall lower density of slots will be beneficial for all interactions along a road, especially for lane change maneuvers. Lower densities might also compensate non-deterministic behavior of vehicles, e.g., the imperfection of human drivers or the varying behavior of automation functions of different car manufacturers. A certain amount of deviation in the behavior of CAVs might be needed since manufacturers certainly will parametrize their automation functions differently. This fact might also prove beneficial for the lane change behavior, as shown in the results for the time losses in Figure 9. Regarding slot control, a distribution of lane change maneuvers over a section of a road might be advantageous for the overall traffic flow and reduce disturbances even further.
In future research, the model should be extended towards including more diverse traffic situations and network elements. Some basic examples would be the coordination of intersection crossings of slots, traffic light coordination, or even the inclusion of vulnerable road users into the slot management. Additionally, a more detailed look on how to integrate V2X into the management system will be taken. Specifically, the questions of how to disseminate the required information between vehicles and infrastructure and if this can be accomplished with a reasonable available bandwidth will be addressed. A spatially more elaborated lane change model would also be favorable and allow to analyze the durations of lane change maneuvers compared to a decentralized approach. In order to obtain first result, a very simple artificial scenario was chosen for this paper, even if it would also work for roads with more than two roads. Future research will also expand the methodology to more complex networks, also including intersections and the organization of the crossing vehicles.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author contributions
DW: Conceptualization, Data curation, Formal Analysis, Funding acquisition, Investigation, Methodology, Project administration, Resources, Software, Supervision, Validation, Visualization, Writing–original draft, Writing–review and editing. MO: Writing–original draft, Writing–review and editing. SR: Conceptualization, Writing–original draft, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This research was funded by the Federal Ministry for Digital and Transport (BMDV) under the grant number FKZ: 19F1094A (project GreenValue).
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
2https://highways.dot.gov/research/operations/CARMA
References
Airports Council International, International Air Transport Association, and Worldwide Airport Coordinators Group (2022). Worldwide airport slot guidelines. Geneva: Montreal.
Avedisov, S. S., Bansal, G., and Orosz, G. (2022). Impacts of connected automated vehicles on freeway traffic patterns at different penetration levels. IEEE Trans. Intelligent Transp. Syst. 23, 4305–4318. doi:10.1109/TITS.2020.3043323
Chai, L., Cai, B., ShangGuan, W., and Wang, J. (2017). “Connected and autonomous vehicles coordinating method at intersection utilizing preassigned slots,” in 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, October16-19, 2017, 1–6.
Day, C. F., and White, J. M. (1980). A slot allocation model for high-density airports. Rep. No FAA-APO-80-13. Available at: https://trid.trb.org/view/318677 (Accessed February 28, 1990).
De Wandeler, Y. (2014). Data From: Building the delay-analysis system for europe. ICAO Business Class Symposium
Econ Inc. (1980). The allocation of runway slots by auction, I. Fort Belvoir, United States: Defense Technical Information Center, 90.
ETSI (2019). EN 302 637-2 - intelligent transport systems (ITS); vehicular communications; basic set of applications; Part 2: specification of cooperative awareness basic service (ETSI).
ETSI (2020a). EN 302 637-3 - intelligent transport systems (ITS); vehicular communications; basic set of applications; Part 3: specification of decentralized environmental notification basic service (ETSI).
ETSI (2020b). TS 103 301 - intelligent transport systems (ITS); vehicular communications; basic set of applications; facilities layer protocols and communication requirements for infrastructure services (ETSI).
ETSI (2021). TS 103 561 - intelligent transport systems (ITS); vehicular communications; basic set of applications; maneuver coordination service (ETSI).
European Commission and Directorate-General for Mobility and Transport (2023). EU transport in figures – statistical pocketbook 2023. Luxembourg: Publications Office of the European Union.
Galich, A., and Stark, K. (2021). How will the introduction of automated vehicles impact private car ownership? Case Stud. Transp. Policy 9, 578–589. doi:10.1016/j.cstp.2021.02.012
Gemma, A., Onorato, T., and Carrese, S. (2023). Performances and environmental impacts of connected and autonomous vehicles for different mixed-traffic scenarios. Sustainability 15, 10146. doi:10.3390/su151310146
Granà, A., Curto, S., Petralia, A., and Giuffrè, T. (2024). Connected automated and human-driven vehicle mixed traffic in urban freeway interchanges: safety analysis and design assumptions. Vehicles 6, 693–710. doi:10.3390/vehicles6020032
Ivanov, N., Netjasov, F., Jovanović, R., Starita, S., and Strauss, A. (2017). Air traffic flow management slot allocation to minimize propagated delay and improve airport slot adherence. Transp. Res. Part A Policy Pract. 95, 183–197. doi:10.1016/j.tra.2016.11.010
Kennedy, D. (1997). Regulating access to the railway network. Util. Policy 6, 57–65. doi:10.1016/S0957-1787(96)00008-2
Koolstra, K. (1999). “Slot allocation on congested motorways: an alternative to congestion pricing,” in ETC 1999: European Transport Conference, Cambridge, UK, January 1999.
Li, H., Roncoli, C., Zhao, W., and Ju, Y. (2024). Assessing the impact of cav driving strategies on mixed traffic on the ring road and freeway. Sustainability 16, 3179. doi:10.3390/su16083179
Lopez, P. A., Behrisch, M., Bieker-Walz, L., Erdmann, J., Flötteröd, Y.-P., Hilbrich, R., et al. (2018). “Microscopic traffic simulation using sumo,” in The 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, November 04-07, 2018 (IEEE), 2575–2582.
Makridis, M., Mattas, K., Ciuffo, B., Raposo, M. A., and Thiel, C. (2018). Assessing the impact of connected and automated vehicles. a freeway scenario. Adv. Microsystems Automot. Appl. 2017, 213–225. doi:10.1007/978-3-319-66972-4_18
Marinescu, D., Čurn, J., Bouroche, M., and Cahill, V. (2012). “On-ramp traffic merging using cooperative intelligent vehicles: a slot-based approach,” in 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16-19 September, 2012 (IEEE), 900–906.
Nichting, M., Hess, D., Schindler, J., Hesse, T., and Koster, F. (2020). “Space time reservation procedure (strp) for v2x-based maneuver coordination of cooperative automated vehicles in diverse conflict scenarios,” in 2020 IEEE Intelligent Vehicles Symposium (IV), Piscataway, NJ, 19 October, 2020–13 November, 2020 (IEEE), 502–509.
Nilsson, J.-E. (1999). Allocation of track capacity. Int. J. Industrial Organ. 17, 1139–1162. doi:10.1016/S0167-7187(99)00016-8
Pachl, J. (2021). Railway signalling principles. Tech. Rep. Braunschw., 83. doi:10.24355/dbbs.084-202110181429-0
Ruppe, S., and Wesemeyer, D. (2020). Verfahren und System zum Steuern eines Verkehrsflusses von Fahrzeugen in einem Straßennetz (Germany: 10 2019 203 347.4).
Schroeder, t., Braun, I., and Schnieder, E. (2000). Modern revenue management strategies for railway slots. IFAC Proc. Vol. 33, 141–146. doi:10.1016/S1474-6670(17)38137-5
Tachet, R., Santi, P., Sobolevsky, S., Reyes-Castro, L. I., Frazzoli, E., Helbing, D., et al. (2016). Revisiting street intersections using slot-based systems. PloS one 11, e0149607. doi:10.1371/journal.pone.0149607
Tian, J., Hao, X., Huang, J., Huang, J., and Gen, M. (2021). Solving slot allocation problem with multiple atfm measures by using enhanced meta-heuristic algorithm. Comput. and Industrial Eng. 160, 107602. doi:10.1016/j.cie.2021.107602
Vranas, P. B. M. (1996). Optimal slot allocation for european air traffic flow management. Air Traffic Control Q. 4, 249–280. doi:10.2514/atcq.4.4.249
Wesemeyer, D., and Ruppe, S. (2020). Verkehrssteuerung in netzwerken auf grundlage dynamischer preise (Stuttgart), Heureka 2020.
Yang, C. Y. D., and Fisher, D. L. (2021). Safety impacts and benefits of connected and automated vehicles: how real are they? J. Intelligent Transp. Syst. 25, 135–138. doi:10.1080/15472450.2021.1872143
Zhang, W., Guhathakurta, S., and Khalil, E. B. (2018). The impact of private autonomous vehicles on vehicle ownership and unoccupied vmt generation. Transp. Res. Part C Emerg. Technol. 90, 156–165. doi:10.1016/j.trc.2018.03.005
Keywords: connected automated vehicles, connected intelligent transport system, dynamic traffic management, mixed-autonomy traffic, slot-based road traffic control, slot management
Citation: Wesemeyer D, Ortgiese M and Ruppe S (2024) Slot-based dynamic traffic control - deriving generation rules from automated and connected driving and lane change behavior. Front. Future Transp. 5:1415375. doi: 10.3389/ffutr.2024.1415375
Received: 10 April 2024; Accepted: 13 August 2024;
Published: 05 September 2024.
Edited by:
Alireza Talebpour, University of Illinois at Urbana-Champaign, United StatesReviewed by:
Jun Han Bae, Rochester Institute of Technology (RIT), United StatesAntonio Polimeni, University of Messina, Italy
Copyright © 2024 Wesemeyer, Ortgiese and Ruppe. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Daniel Wesemeyer, ZGFuaWVsLndlc2VtZXllckBkbHIuZGU=