 Ruth David
Ruth David Dirk Söffker
Dirk Söffker- Chair of Dynamics and Control (SRS), University of Duisburg-Essen, Duisburg, Germany
A major aspect in the development of advanced driving assistance systems (ADASs) is the research in developing human driving behavior prediction and recognition models. Recent contributions focus on developing these models for estimating different driving behaviors like lane or speed change. Thus, the models are incorporated into the ADAS to generate warnings and hints for safe maneuvers. Driving behavior recognition and prediction models are generally developed based on machine learning (ML) algorithms and are proven to generate accurate estimations. Previous review research contributions tend to focus on ML-based models for the prediction and recognition of speed change, trajectory change, and even driving styles. Due to high number of driving errors occurring during a lane change, a state-of-art review of different ML-based models for lane-changing behavior prediction and recognition is helpful to present a comparison between different models in terms of structure, influencing input variables, and performance. This enables the integration of the most efficient model for the development of ADASs to avoid accidents during a lane change. First, definitions and terms related to the model’s task and evaluation metrics used to evaluate the model’s performance are described to improve the readability. Then, the different input variables of the models affecting the lane-changing behaviors are presented. Next, a review of the models developed based on well-known approaches, such as artificial neural network (ANN), hidden Markov model (HMM), and support vector machine (SVM), using different input variables is given. Three lane-changing behaviors are focused on here: left/right lane change and lane keeping. The advantages and disadvantages of the different ML models with a comparison are summarized as well. Finally, the improvements required in the future are discussed.
1 Introduction
According to the global status report by the Word Health Organization (WHO) in 2018, fatalities from vehicle accidents account for approximately 1.3 million lives each year (Word Health Organization, 2018). Hence, safety on the road is a major focus in recent years in many countries. These accidents are often related to human driving behaviors, such as improper lane-changing maneuvers, aggressive driving, or fatigue driving (Word Health Organization, 2018). To tackle this problem, advanced driving assistance systems (ADASs) have been developed to assist a driver by providing hints and warnings. The development and growth of ADASs is reliant on driving behavior prediction and recognition models. Behaviors are individual, so developing individualized models for ADAS enables estimations to be provided on an individual level. Prediction and recognition models are often developed based on machine learning (ML) approaches due to its ability to learn and generate accurate estimations. Commonly used ML approaches in developing these models are artificial neural network (ANN), hidden Markov model (HMM), and support vector machine (SVM). Thus, focusing on driving behavior research is important.
A high proportion of the existing research focuses on developing lane-changing prediction and recognition models, as improper lane-changing behaviors are one of the major causes of accidents (Statistisches Bundesamt, 2020). However, currently there are a limited number of review papers that focus only on approaches developed for the prediction and recognition of lane-changing behaviors. Previous reviews within this field focused on estimations of various driving aspects, such as speed, trajectory, driving styles, and drowsiness, while driving using ML-based approaches (Lin et al., 2014; Miyajima and Takeda, 2016; Kang, 2013). Kang (2013) discussed different methods to detect drowsiness and distracted driving. On the other hand, there are review contributions that focus only on one specific ML-based approach for estimations of driving behaviors, as described by Deng and Söffker (2022).
While many studies have developed models based on ANN, HMM, and SVM algorithms, there are only a limited number of studies that have compared them like Lin et al. (2014). Lin et al. (2014) listed the advantages and disadvantages of four different algorithms. The authors state that ANN has efficient pattern recognition ability for large data sets. Here, HMM is stated to have good prediction and recognition abilities of driving behaviors. The study also points out HMM’s ability to deal with time series data, thus making it a suitable choice for developing driving behavior estimation models. Upcoming driving behaviors are stochastic and are determined based on the current behavior; thus, HMM plays a significant role in predicting the behaviors (Jiang and Fei, 2015; Zou and Levinson, 2006; Deng and Söffker. 2022). There are some studies that have listed the advantages of SVM for the identification of behaviors as described by Li et al. (2017) and Wang et al. (2019), stating its ability to develop high accuracy values and to handle high-dimensional feature space. Although there are limited studies that have reviewed and compared the three algorithms, many of these studies only summarize other driving behaviors, such as driving styles as by Martinez et al. (2018). While some review papers have summarized methods for lane-changing prediction and recognition, these may not review all the mentioned algorithms. Also, there is still a lack of information in the literature examining different studies that have developed lane-changing behavior prediction and recognition models based on the three methods. In addition, many studies do not provide a detailed overview of the different variable types used as inputs for the prediction and recognition of models.
In contrast, this contribution focuses on ML-based approaches, namely, ANN, HMM, and SVM, for the prediction and recognition of lane-changing behaviors. The study will also provide a review of the different variables used as inputs for developing lane-changing prediction and recognition models. Lane-changing behaviors analyzed are lane change to the right (LCR), lane keeping (LK), and lane change to the left (LCL). These models are developed based on two methods: 1) combining two or more ML algorithms and 2) defining suitable input features by using feature selection techniques. An example of the first option is presented by Xiong et al. (2018), whereby SVM is applied for the classification of leaving and remaining in a lane scene based on trajectory of the vehicle; then, a Gaussian mixture-based HMM model is trained to predict if a collision can occur for each scenario. Feature selection techniques, such as the filter and wrapper method, are applied by Liebner et al. (2013) and Mostert et al. (2018). In research contributions, different metrics, such as ACC, detection rate (DR), precision, false alarm rates (FAR), area under the curve (AUC), and F1 score, are used to validate the estimations by comparing the estimated and actual behaviors.
This contribution is organized as follows: first, definitions and terms based on the model’s tasks and evaluation metrics to analyze the model’s performance are given. Next, an overview of the different input variable types used for the development of prediction and recognition models is presented. Then, a review of different ML-based approaches used to develop these models is summarized. The advantages and disadvantages of each approach and a comparison between the ML-based models are discussed as well. An outlook on questions to be improved based on the limitations of the approaches is discussed. Finally, a conclusion is given.
2 Definitions and criteria
To improve the readability of the review, relevant definitions and terms are introduced before using them in a different context. The terms are relevant for the review as a displaced introduction will affect the readability. Here, the definitions of terms such as estimation, prediction, and recognition are explained. Furthermore, definitions of the different evaluation metrics used to evaluate the performance of the machine learning-based approaches for driving behavior estimations are explained. Commonly used metrics are ACC, DR, precision, FAR, AUC, and F1 score which compares the estimated and actual behavior for similarities (Powers, 2011).
In this study, the recognition of lane-changing behaviors is defined as detection of behaviors performed by drivers, while prediction deals with predicting the most probable behavior in the near future based on a set of behaviors performed by the driver (Jardim et al., 2015). Estimation of lane-changing behaviors is either prediction or recognition of lane-changing behaviors. As for the metrics, ACC, DR, precision, and FAR are defined using true positive (TP), false positive (FP), true negative (TN), and false negative (FN) values given by Powers (2011).
The TP describes the number of cases whereby the predicted and actual behavior is positive, for example, the predicted and actual behavior is lane change to the right. Alternatively, the FP describes number of cases whereby the predicted behavior is positive, while actual one is not. A similar idea is applied for TN and FN. The ACC defines the percentage of correct predictions, while the DR (also known as recall) defines the ratio of true positive (correctly predicted as positive) cases to the number of actual positive cases. Precision defines the ratio of the true positive cases to the number of predicted positive cases. On the contrary, the FAR describes the ratio of false positive (incorrectly predicted as positive) cases to the actual number of negative cases. Higher ACC, DR, and precision values and low FAR values indicate better estimation performance of the approaches. A commonly known property of ACC is that it performs poorly with a non-balanced data set (López et al., 2013), while DR and precision provide a better evaluation for non-balanced data sets (Powers, 2011). The drawbacks of DR and precision are that DR does not consider FP values, while precision does not consider FN values (Sharath and Mehran, 2021). Another well-known metric is AUC, which shows the relationship between recall and false positive rate (FPR). The F1 score is also used, which defines the harmonic mean of precision and recall given by Powers (2011).
It realizes the difference between correctness and coverage (Fernández et al., 2018). The F1 score and AUC with higher values indicate a good estimation.
3 Input variables affecting driving behaviors
Driving behaviors are the actions carried out while driving, affected by environmental conditions and driver’s characteristics. To analyze the behaviors, different variables (features) such as environmental, eye tracking, head tracking, and physiological variables are used. The variables provide information about the driver’s, ego vehicle’s, and surrounding vehicle’s state. In research contributions, these variables are used as inputs for prediction and recognition models. For lane-changing prediction and recognition, environmental variables are mainly used as the environmental conditions generally influence the driver’s decision-making process. However, the eye/head tracking and physiological variables also play a role here. Feature selection techniques are used in some contributions to select the most suitable variables, while others use automatic feature selection process within the ML approach/deep learning methods. Hence, in this section, the different input variables used for the development of lane-changing prediction and recognition models are summarized.
3.1 Environmental variables
Environmental variables provide information that affects the driver’s decision based on the relationship between the ego vehicle and surrounding vehicle. The environmental variables are divided into two categories: 1) variables related to the ego vehicle’s and surrounding vehicle’s state and 2) variables related to the driver’s operational information. The state of vehicle variables provides information about the relationship between the different vehicles and the driving environment. Typical vehicle state variables considered in the literature are acceleration, vehicle speed, and time to collision (TTC). When the driver realizes an unexpected maneuver, driver’s operational variables are needed to provide vehicle control information for a better understanding of the maneuver. These include steering wheel angle, position of acceleration/brake pedal, and engine speed. The variables are collected using different sensors, such as controller area network (CAN) bus and accelerometer. As mentioned, most literature research studies use environmental variables for the prediction and recognition of lane-changing behaviors. Tran et al. (2015) proposed an HMM-based approach for predicting lane-changing intentions using the driver’s operation variables (steering wheel, gas, and brake pedal positions) and the vehicle state variables (acceleration, yaw rate, and velocity). The maneuvers considered include left/right lane change, turn right/left, and stop/non-stop on highway and urban environments using a driving simulator. Han et al. (2019) developed a framework for the prediction and recognition of lane-changing behaviors. Here, the driver’s characteristics are first estimated using an optimization-based technique. Then, based on the estimated characteristics, lane-changing behaviors are predicted using a neural network-based approach. Here, environmental variables such as longitudinal position, velocity, and lane-number are considered for the estimation of the driver’s characteristics and lane-changing behaviors. A lane-change intention system is proposed by McCall et al. (2005) using the Bayesian learning method by considering environmental variables based on vehicle and lane position data. A summary of the environmental variables and the literature examples that use these variables are given in Table 1.
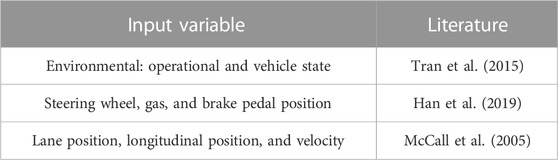
TABLE 1. Summary of environmental variables.
3.2 Eye- and head-tracking variables
Eye- and head-tracking variables are also used in studies related to the estimation of lane-changing behaviors. Eye-tracking variables are collected using an eye tracker device or cameras to provide information on eye movements and gaze in different driving situations. The main eye-tracking variables used in driving research are eye fixations and saccades (Vetturi et al., 2020). Head-tracking variables are based on the head poses and head movements of the driver which are usually captured using camera sensors. Head-tracking variables generally consist of head rotation, head angles, and head positions. The aim of these devices is to monitor the behavior of the driver so one can deduce the awareness and intent of the driver. The eye- and head-tracking variables provide information on the driver’s awareness of the surroundings/situation (such as maneuvering at an intersection) and how the driver intends to proceed in a given situation (Doshi and Trivedi, 2009). Evaluating the reliability of eye gaze and head dynamics to determine the intention of the driver is studied by Doshi and Trivedi (2009). Based on the results, head dynamics are more useful than eye gaze information for the intention determination.
Head-tracking variables are used by Leonhardt and Wanielik (2017) to analyze the driving maneuver preparation for a lane-change prediction based on ANN. Here, the head’s rotation around the vertical axis, lateral movement, and head tracking’s confidence value are used as input variables. However, in certain models, the inclusion of eye-tracking variables increases the estimation performance. For example Li et al. (2016) proposed a Bayesian network-based approach to predict lane-changing intentions. Here, eye-tracking and vehicle data are collected to be used as inputs. The performance of the model based on the fusion of both eye-tracking and vehicle-related variables and individual variable sets are evaluated. From the results, the Bayesian model using the fused set performs better than when using the individual set. The usefulness of eye-tracking information for designing a HUD-based warning indicator is studied by You et al. (2017). Eye fixation areas and fixation moving paths’ frequency are analyzed in the lane-changing situations. Deng et al. (2020) evaluated the role of eye-tracking information for the prediction of lane-changing behaviors based on CNN, HMM, random forest (RF), and SVM to develop an assistance system. From the results, it can be concluded that the performance of integrating the eye-tracking data depends on the prediction ability and choice of the machine learning algorithm. In addition, driver’s decisions are mainly based on environmental factors. For example, using only eye-tracking variables with the mentioned approaches produced poor ACC values. On the other hand, CNN-, HMM-, and RF-based models produced slightly better results when using a fusion of eye-tracking and environmental variables. However, the SVM-based model performs better when using only environmental variables (Deng et al., 2020). A summary of the eye- and head-tracking variables is given in Table 2.
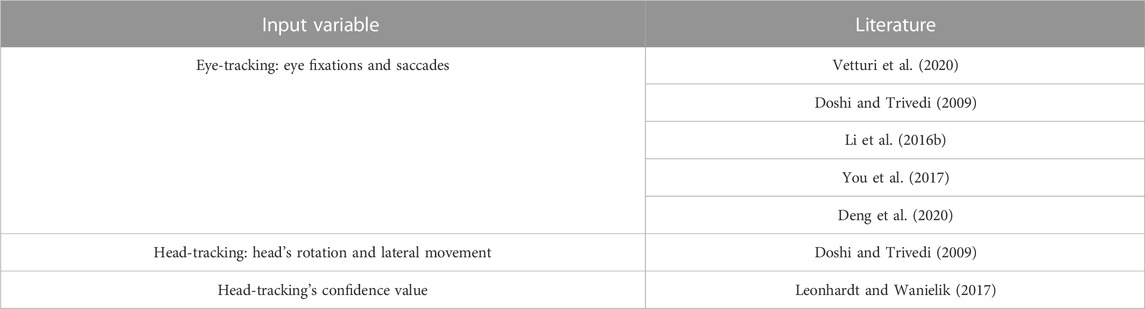
TABLE 2. Summary of eye- and head-tracking variables.
3.3 Physiological variables
Physiological variables provide information about the driver’s characteristics, patterns, and mental state. Common physiological variables in driving research include electrocardiogram (ECG), electroencephalogram (EEG), pulse rate, and blood alcohol concentration (BAC). Physiological information is mainly used as input for the detection of fatigue driving and drunk driving. However, in certain cases, it can be used for predicting lane-changing behaviors as used by Murphey et al. (2015). The authors state that in previous studies only environmental variables have been considered; thus, the aim is to use physiological variables to study and evaluate the prediction performance. In this novel approach, a Granger causality test is used as a feature selection technique, and neural network is used for the classification of the lane change. Here, only physiological variables such as ECG, galvanic skin response (GSR), and respiration rate (RR) are considered as inputs. Based on the results, a true positive rate (TPR) of 70% and a false positive rate (FPR) of 10% are achieved for 30 lane-changing and 60 non-lane-changing events. Li et al. (2019) also used physiological variables in the context of lane-changing behaviors. While this study does not predict lane changes, it considers predicting the risk during a lane change using an HMM-based approach. The authors consider environmental, eye-tracking, and physiological variables. The influence of eye movement, heart rate variability, and vehicle dynamic variables on the driving risk are evaluated using a two-factor indicator analysis technique. The HMM results showed an ACC value of 90.67% between the predicted risk and perception of the drivers. The summarized explanation of the variables is given in Table 3.

TABLE 3. Summary of physiological variables.
4 Machine learning-based models
4.1 Artificial neural network
Artificial neural network (ANN) is a well-known ML approach developed for the classification and pattern recognition tasks in recent years. The ANN model is designed based on the functionality of the biological neural structure. The network consists of interconnected layers of neurons that processes information from large data sets to produce outputs to classify the data. A basic ANN consist of an input layer, hidden layers, and an output layer. The data are given to the network in the input layer. For the development of the models, each variable is represented as an input neuron. This information is passed to the neurons in the hidden layers for processing to produce outputs. In a driving behavior estimation model, each neuron in the output layer represents a specific class of driving behaviors, such as the different lane-changing behaviors. The connection between the neurons in different layers have specific weights associated with it, which are adjusted to minimize error margins. All neurons have a bias value with the exception of the input-layer neurons. In the output layer, the predicted probability of each class (each neuron) is produced. The final result is determined based on the class with the highest predicted probability. This predicted probability is determined based on the input variables, biases, and weight parameters, given by
Here, Y denotes the predicted probability; wi, the weight; b, the bias value; xi, the input value; and f, the activation function. As mentioned, for lane-changing behavior estimations, three classes are distinguished as LCR, LK, and LCL.
An example of an ANN-based approach for developing the lane-changing prediction model is developed by Leonhardt and Wanielik (2017). The prediction is based on three consecutive phases: intention to perform a lane change (describing the driving situation), preparation of a lane change (describing the behavior), and the lane change maneuver itself (describing the vehicle maneuver). Three sets of variables, each corresponding to the three phases, are defined. Environmental and head-tracking variables are used in this model as inputs. The environmental variables considered are velocity, yaw rate, gas pedal activation, and break pressure of the ego vehicle. For the head-tracking variables, head rotation around the vertical axis, lateral movement, and the confidence value of head tracking are chosen as relevant variables. Two individual neural networks are developed, each to predict the LCL and LCR, respectively. Here, different time spans before a lane change (suggesting the latest time for a prediction before a lane change) and different configurations are analyzed to evaluate the effect on the model’s performance. Hence, time spans of 2, 4, and 8 s before a lane change with different configurations are selected for predictions. The model is evaluated using the individual and fusion of the variable sets as inputs. The results show that the model performed better with the fused set in all the time spans. Based on the results, a time span of 2 s produced the highest prediction performance with an AUC value of 0.972 and a FAR of 0.018, followed by 4 s and 8 s.
Developing a model using only one ANN model may not be sufficient to handle and interpret certain information to produce optimal estimations. Hence, a method to solve this problem is to combine ANN with another ML algorithm or to combine different types of ANN. Griesbach et al. (2021) used a recurrent neural network (RNN) in combination with long short-term memory (LSTM) for lane-changing predictions. The RNN is implemented with LSTM cells, based on the study of Su et al. (2018). Different combinations of environmental input variables are tested to be chosen as the input variables; however, the combination of steering wheel angle and indicator produced the highest evaluation performance (AUC of 0.93). The outputs are LCR and LCL behaviors. Driving data from 57 drivers who drove a 40-km route in the urban area of Chemnitz, Germany, are collected. The results based on this model are compared with the results of an echo state network (ESN) model to evaluate the performance. Based on the results, the RNN-based model performs better in predicting LCR with a perfect ACC of 100%, while the ACC of the ESN model is 92%. However, the ESN model produces higher ACC for predicting LCL. Dou et al. (2016) combined SVM and ANN to develop a lane-changing prediction model. Here, the model predicts the feasibility and suitability of a lane change based on environmental variables such as speed difference, vehicle gap, and positions. By comparing the proposed methods with the Bayes classifier and a decision tree, the proposed method produced the best performance with an ACC of 94% for non-merge and 78% for merge events. Integrating the developed models mentioned in future developments of ADAS or autonomous vehicles for behavior estimation can provide new knowledge for better driving assistance or if intervention is needed. This reduces mishaps between drivers and between driver and the intelligent vehicle to maintain road safety. The summary of the presented contributions, which include model types, literature, and performances, is given in Table 4.

TABLE 4. Summary of ANN-based models for lane-changing estimations.
4.2 Hidden Markov model
The hidden Markov model was initially used for speech recognition and biological-sequence analysis. An HMM defines the stochastic process between a set of unobserved states (hidden) and a set of observed states (Rabiner, 1989). In an HMM, the state at time t depends on the state at time t − 1. The hidden state and observation state sequences are labeled Q = {Q1, Q2, … , QL} and O = {O1, O2, … , OL}, respectively, whereby L is the length of the sequence. The hidden state sequence can be determined through the observation sequence using an HMM parameter. The Baum–Welch and Viterbi algorithms are used to apply the HMM. The Baum–Welch algorithm is used to estimate the HMM parameter when the HMM is trained. Thus, the HMM parameter is evaluated to best fit a given observation sequence O and the corresponding hidden state sequence Q. The most probable hidden-state sequence can be determined using the Viterbi algorithm based on the estimated HMM parameter. When applying HMM for lane-changing behavior prediction as suggested by Deng et al. (2018), the observation variables are the input variables, while the hidden states are the different lane-changing behaviors. Hence, the most probable driving behavior sequence is estimated with environmental variables like distances and velocities used as observation variables (Deng et al., 2018). A prefilter is introduced to the HMM and optimized in this study. The aim of the prefilter is to quantize the variables into the observation sequence. Comparisons of the prediction performance are drawn using a general and the optimal prefilter. The ACC and DR values increased when the optimal prefilter was used, generally higher than 80% with a few exceptions.
Berndt et al. (2008) used an HMM for continuous recognition of lane-changing maneuvers. A total of 100 lane changes are performed in the training data set, which are made up of 50 LCL and 50 LCR. Each maneuver is tested with a few combinations of input variables, HMM grammars, and sub-model configurations. Suitable model grammars (number of states in the left–right Markov chain) and sub-model dimensions are developed using the steering wheel angle. Hence, model grammars with different number of states are tested. Each model grammar is also tested with sub-models of different number of states. Here, a sub-model of three states with a grammar model of nine states is chosen as the best model. In addition, the authors examine if additional input variables in combination with the steering wheel angle increases the recognition performance. The highest training performance is achieved with the addition of steering wheel velocity, used as input variables (observation variables). The performance results showed a sensitivity of 71% and 74% for the LCL and LCR, respectively. As these models are widely applied in ADAS to ensure that driving safety is adhered, a recent study that focuses on this application is by Yuan et al. (2018). The prediction model is developed to optimize the adaptive cruise system that evaluates the vehicle ahead. Here, an HMM-based model is developed to estimate lane-changing behaviors of the vehicle in front of the ego vehicle. Input variables used are the distance between the ego vehicle and the front vehicle, the front vehicle’s longitudinal velocity, and its lateral velocity. The model is able to predict with a maximum ACC of 97% for straight roads and 96% for curved roads within a time window length of 4.5 s and 3.5 s, respectively. An intention prediction method based on the HMM is developed for autonomous vehicles to predict lane-changing intentions of a human driver by Liu et al. (2020). The aim is to predict the intention of the targeted vehicle based on environmental input variables, such as vehicle velocities, accelerations, and offsets between the lanes and vehicles. Two approaches are introduced, whereby the HMM is trained with discrete and continuous variables (either from the targeted vehicle or both targeted and surrounding vehicles). The results show that the prediction of the model trained with continuous variables produces higher ACC than discrete variables. Furthermore, the ACC is slightly higher when the model is trained using variables related to both the targeted vehicle and surrounding vehicles with some exceptions, such as when the prediction time is closer to the time of the actual intention. For example, the ACC is less than 78% when only the targeted vehicle-based variables are involved, while it is 80% when both variables are considered.
Often, research contributions focus on combining the HMM with other ML approaches/other mathematical methods to improve the prediction and recognition performance of a model. In addition, if it is unable to model certain information on its own, the HMM requires the use of another algorithm. The HMM and the other ML algorithm have different roles in the model. A Gaussian mixture hidden Markov model is developed by Jin et al. (2020) to characterize lane-changing behaviors for autonomous vehicles. The Gaussian mixture model aims to extract variable values to characterize lane-changing behaviors, whereby a probability density function is used to describe each variable value. Then, the HMM is used to develop a relationship between the hidden states (lane changing behaviors) and observed states (input variables). A total of nine environmental input variables are considered, consisting of speed and distances to surrounding vehicles. The results showed that the highest ACC achieved is 95.4%. Deng and Söffker (2018) combined the HMM with fuzzy logic (FL) to develop a lane-changing prediction model based on the safety level. In this study, the safety level of a scene for a lane change is defined using TTC and distances. Using these variables as input, FL is used to classify the safety level of a scene into very safe, safe, and dangerous. The HMM is used to estimate a lane change based on the safety of the scene using environmental variables. The obtained ACC and DR are higher than 80% for different lane-changing behaviors. Klitzke et al. (2020) developed a novel approach based on HMM, divisive hierarchical clustering (DHC), and dynamic time wrapping (DTW) to identify lane changes on a highway. Driving maneuvers are clustered using HMM and DHC into primitive driving actions. Based on primitive actions and defined patterns, DTW is employed to identify a lane change. An F1 score of 0.9801 for lane change identifications is observed. Li et al. (2016) developed a lane-changing intention recognition approach based on HMM and Bayesian filter (BF) techniques. The HMM produces preliminary behavior classifications, which is then used by the Bayesian filter part to develop final lane-changing classifications. The input of the model consists of steering angle, lateral acceleration, and yaw rate obtained from the CAN bus. The model successfully recognizes LCR and LCL behaviors with an ACC of 93.5% and 90.3%, which are better than using only the HMM. Based on the contributions analyzed, the results of other ML approaches/HMM can be used as input or additional information for HMM/other approaches to be trained and estimate lane-changing behaviors (Jin et al., 2020; Klitzke et al., 2020; Li et al., 2016a). The other approaches can also be used to distinguish different driving scenarios/styles, which are then used to estimated lane-changing behaviors using the HMM (Deng and Söffker, 2018). As previously stated, the incorporation of these developed models into currently available ADASs (some models have already been integrated) has the potential to improve the traffic safety. A summary of the HMM-based models is presented in Table 5.
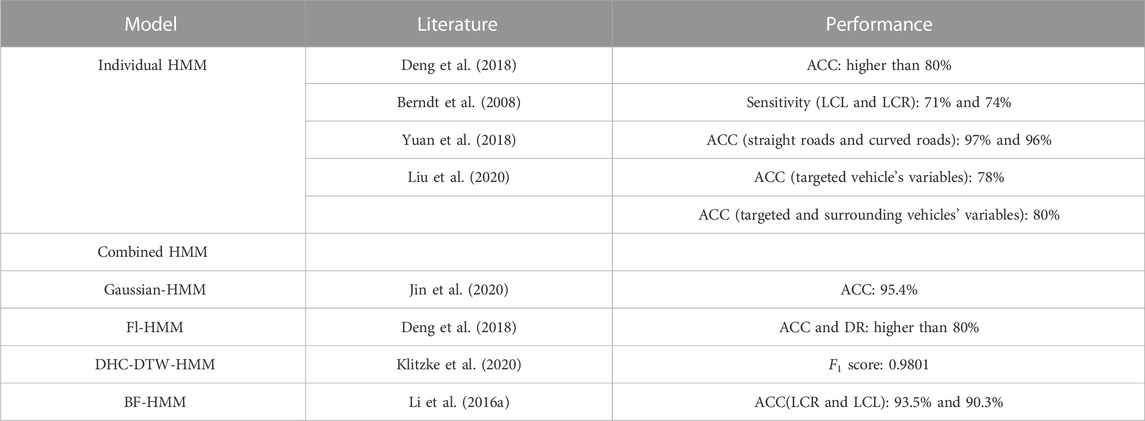
TABLE 5. Summary of HMM-based models for lane-changing estimations.
4.3 Support vector machine
SVMs are supervised machine learning algorithms initially developed for the classification of two classes by finding an optimal hyper plane that separates the data points from both classes (Cortes and Vapnik, 2004). SVM supports both linear and non-linear separable data. The aim of SVM in a linear separable data set is to find the best hyper plane position such that the margin of separation between both classes is maximized. When data cannot be separated linearly, a non-linear SVM is used instead through the application of a kernel function, which is the case in most real-world applications. A lane-changing behavior prediction model is based on non-linear data as it has more than two classes. Here, the inputs are transformed into a higher dimension input vector using the kernel function. This multi-class classifications are usually realized using one-against-all and one-against-one approach.
An SVM-based model is developed for the detection of lane-changing intentions by Mandalia and Salvucci (2005). Different combinations of window sizes, overlapping vs. non-overlapping, and input variable sets are evaluated to analyze which combination resulted in the best classification performance. Environmental variables are extracted from the driving data for detecting the intentions. Five sets of variables are selected to validate the set that produced the best classification performance. In set 1, acceleration, lane positions, and heading are included. In set 2, the importance of the lead car distance is considered, while set 3 considers the effect of longitudinal and latitudinal variables. Set 4 examines the influence of the steering wheel angle. Finally, only lane positions are included in set 5 (Mandalia and Salvucci, 2005). Based on the performance, set 5 produced the best classification results in all time windows in the over-lapping representation. The authors specify that the model has a good performance, whereby the highest ACC obtained is 97.9% in a 1.2-s time window.
Similar to previously introduced ML-based models, combining SVM with another ML algorithm is a common approach to obtain extra information and to produce a better performance. Izquierdo et al. (2017) combined ANN and SVM to develop a lane-changing prediction model. Two types of ANN (non-linear auto regressive neural network (NARNN) and feed-forward neural network (FFNN) are used to predict the trajectory of the vehicle (lateral position), a few seconds ahead of the ego vehicle. The NARNN is used for predicting time series data, while the FFNN (the simplest form of ANN) is used for the mapping of the input and output. An SVM is then used to predict whether a lane change will occur. The environmental feature variables extracted for the trajectory and lane-changing predictions are lateral position, lateral speed, and heading error. The NARNN uses the same variable to predict an input (here the lateral position), while the FFNN uses any variable as input to predict an output that could be same or different to the input. For the SVM, the estimations of ANN is used as an extra variable for better classification of lane changes. From the prediction of the ANNs, the NARNN does not show an improved prediction when compared with a baseline method; however, the FFNN is able to improve this by reducing the error values. Based on the SVM classification, it is able to predict a lane change 3 s prior to a lane change; however, no evaluation metric scores are provided here. Probabilities of a situation-based approach and an SVM-based movement approach are combined to predict LCR, LK, and LCL by Wissing et al. (2017). The situation-based probability is based on the current traffic situation to predict a possible lane change, while the movement-based probability is defined using SVM based on vehicle movements in the lane. Both probabilities are fused to estimate an upcoming lane change. The situation-based approach considers environmental variables that describe the inter-vehicle relation to analyze the current traffic situation, while the movement approach considers environmental variables related to the vehicle movements in the lane, such as distances and velocities. The presented approach is able to predict LCR with a recall value of 0.93 and LCL with a recall value of 0.72. Kumar et al. (2013) combined SVM and Bayesian filter (BF) to develop a lane-changing intention prediction model. A multiclass SVM is used for the classification of the trajectories that belong to three different classes, namely, LCR, LK, and LCL. The SVM outputs arethen used as inputs for the Bayesian filter for developing an improved prediction result. The Bayesian filter aims to provide a smoothing effect to reduce FAR and missed detections in contrast to the SVM-based results. Hence, a comparison of the prediction performance between the combined SVM and BF model and only SVM is presented. Environmental variables such as lane information, speed, and steering wheel angle are considered as inputs for the SVM. The results show the average precision increases from 0.2857 to 0.7154 when using the combined model instead of the individual SVM model. Similar precision values are obtained when the model is trained and tested with different combination of drivers’ data, with the highest precision at 0.8235, proving its robustness. In Table 6, the summary of the SVM-based models is given.
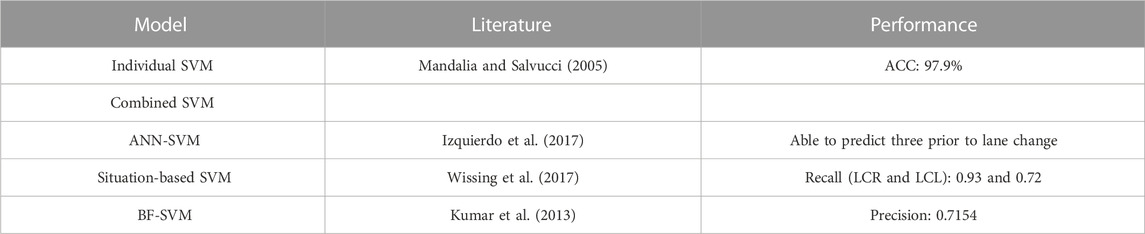
TABLE 6. Summary of SVM-based models for lane-changing estimations.
5 Discussion
The main focus of this contribution is to analyze and compare different lane-changing behavior recognition and prediction models based on ANN, HMM, and SVM. Each of the mentioned ML-based approaches have their advantages and disadvantages, thus having different performances based on different factors. Some of the factors that affect the performance include the structure of the model, properties of the ML approaches, input variable types, data size, and complexity of the data. The advantages and disadvantages of the different approaches are described in this section. Comparisons between different ML-based approaches for lane-changing behavior detection in terms of features, driving scenarios, and performances are displayed in Table 1.
5.1 Advantages and disadvantages
As mentioned, the advantages and disadvantages of the approaches affect the prediction/recognition performances. One of the advantages of ANN is its ability to handle multi-class problems, in contrast to SVM, whereby the performance decreases with increasing number of classes (Liang et al., 2007). The contribution by Leonhardt and Wanielik (2017) shows this and its ability to combine different types of information. Here, the different driving features describing the driving phases of a lane change are combined for estimations. Another advantage, particularly with deep neural network, is its ability to extract features automatically. However, a major disadvantage of ANN is its tendency to overfit. Increasing the number of neurons in the hidden layer shows a low performance due to overfitting; hence, Leonhardt and Wanielik (2017) limited the hidden layers neurons to three. On the contrary, the SVM possesses certain advantages over ANN. For example, SVM does not have the tendency to overfit, by choosing a hyperplane which minimizes the distance between the hyperplane and the nearest training sample point (Liang et al., 2007). To avoid overfitting, Dou et al. (2016) also combined ANN with the SVM. In the reviewed paper (Kumar et al., 2013), this advantage takes effect as it is able to accurately classify trajectory belonging to different classes. Another observed advantage is its ability to transform a low-dimension non-linear classification problem into a high-dimension linear classification problem by mapping input data from a low-dimensional space to a lane-changing behavior in a high-dimensional space. Moreover, training of SVM models only requires few samples in high-dimensional spaces compared to training ANN (Liang et al., 2007). Mandalia and Salvucci (2005) chose an optimal data representation of the input features which is challenging in the SVM. Rather than using the original values, variance of features over others are used to solve this, reducing the input size whilst extracting the change in features. Nevertheless, the SVM possess certain drawbacks. As stated by Kumar et al. (2013), an extra BF is needed to improve the performance of the SVM. While the authors state that the false detection rates are mainly caused by lane tracker inaccuracies, there could be reasons related to the SVM model and its parameters. A possible reason is the development of optimal weights and kernel function is challenging when applying the SVM individually. Advantages of HMM are its stochastic properties, the ability to manage time series data (Lin et al., 2014) (Jiang and Fei, 2015), and the ability to deal with temporal pattern recognition (Meyer-Delius et al., 2009). These benefits make it feasible for the prediction of driving behaviors, since future driving behaviors are described as stochastic and dependent on the current behavior (Jiang and Fei, 2015). However, the HMM has several limitations as described by Deng and Söffker (2018), whereby models with different parameterizations are required for different drivers to generate accurate estimations as driving behaviors are individual. Thus, the HMM has poor generalization capabilities. The HMM approach is also not suitable for long-term prediction as the number of hidden states must be specified prior to training as observed by Deng and Söffker (2022). Liu et al. (2020) observed the limitations of using discrete characterization features in comparison to continuous characterization with HMM, as the performance is reduced due to information loss. A major disadvantage of the reviewed methods is that the methods are often combined with another method for an improved performance, which only increases the complexity.
5.2 Summary of results and comparisons
In Table 1, a comparison of machine learning-based approaches for the estimation of lane-changing behaviors in terms of variables, traffic environment, and contributions are presented. The approaches compared are ANN, CNN, HMM, SVM, DBN (dynamic Bayesian network), and RF-based approaches. Based on the comparisons of different models discussed in this study and illustrated in Table 1, the following conclusions are summarized. Table 7.
1) Environmental variables have the highest influence on developing machine learning-based models for the estimations of lane-changing behaviors (all the contributions listed in Table 1), followed by head/eye-tracking variables (Leonhardt and Wanielik, 2017; Deng et al., 2020), and physiological variables (Murphey et al., 2015; Wang et al., 2016). The eye-tracking and physiological variables do not significantly contribute to the prediction and recognition of lane-changing behaviors as stated in the study of Doshi and Trivedi (2009). Deng et al. (2020) produced poor ACC values and estimation models using only eye-tracking variables. As mentioned, a reason for this is because decision making is mainly based on environmental information, which describes the relationship between the ego vehicle and surrounding vehicles. Only a small number of contributions consider the role of physiological variables.
2) Combined ML approaches often have better performance than using a single approach by itself. The purpose of using more than one algorithm is to employ the advantages from different approaches and to achieve different tasks which cannot be done by using a single approach. In lane-changing estimation models, the outputs of one approach can be used as input for another as extra information for predicting the behaviors. Also, one approach can be used to recognize driving patterns, styles, and scenarios which are then used with another approach to estimate the lane-changing behaviors.
3) To evaluate the performance of lane-changing behavior models, common metrics used in contributions are ACC, DR, precision, FAR, AUC, and F1 score. These metrics produce the most accurate evaluation between the estimated and actual behaviors. However, different metrics place varying levels of importance on the different classes, depending on the classification problem. The metric best focusing on the importance of each class should be selected to evaluate the lane-changing behavior classifications. For example in an imbalanced data set, the metric accuracy tends to attach more significance to the majority class than the minority class, making it difficult to show good performance in the minority class. This is known and avoided by more suitable metrics like F1 score.
4) From the results of different contributions, the performance values of different approaches do not differ much. For example, most models tend to have good ACC and DR values which are higher than 80% with low FAR values. High AUC and F1 scores are also achieved ranging from 0.8 to 0.98.
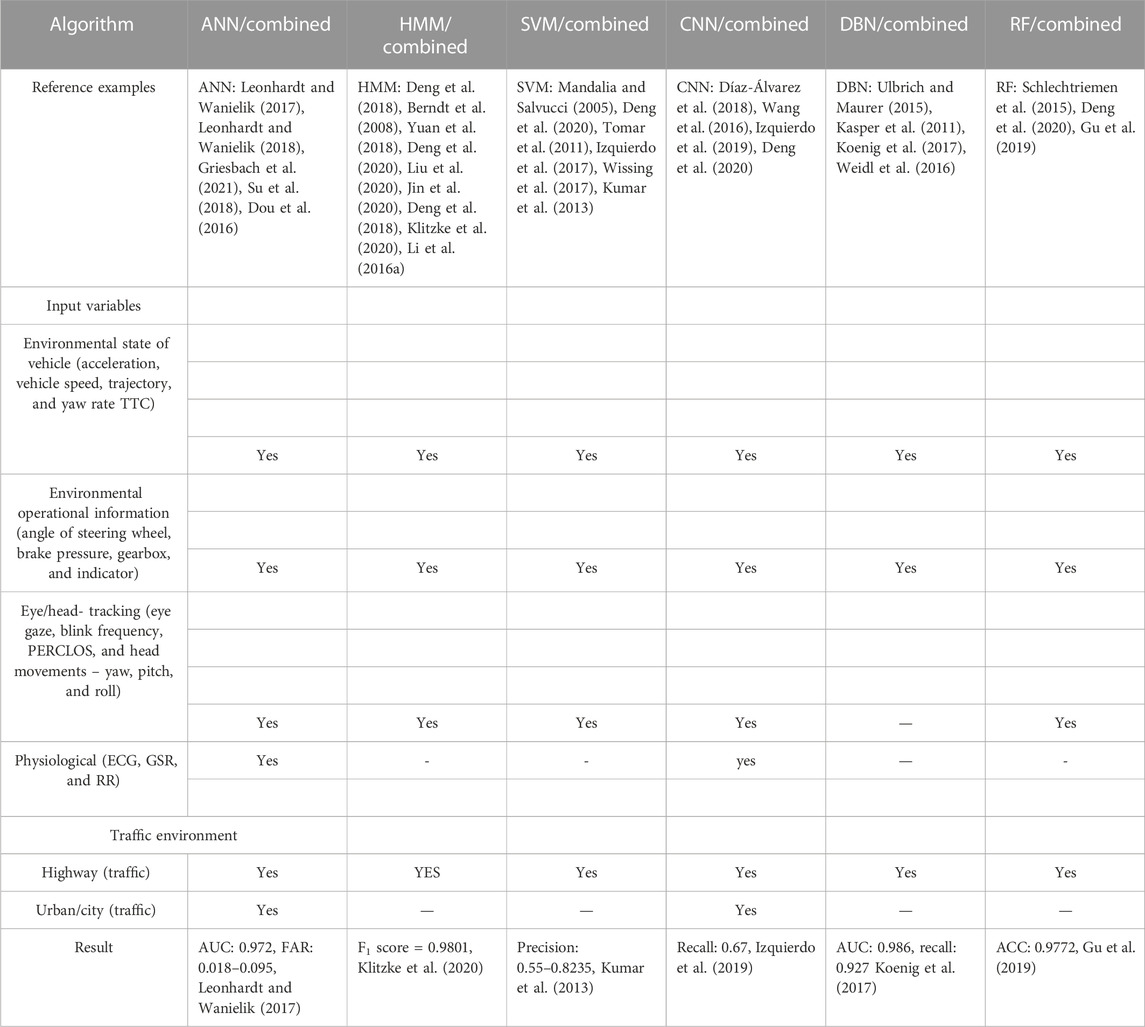
TABLE 7. Comparisons between different models for lane-changing behavior prediction and recognition.
6 Conclusion
In this paper, an overview of different ML-based approaches, namely ANN, HMM, and SVM, for lane-change prediction and recognition is presented. These approaches are selected because these approaches are the most developed in the literature. Lane-changing behavior is considered in depth in this literature because of its safety significance during a lane change. Each approach has its advantages and disadvantages, depending on the specifications of the approaches, the behavior type, and input variables for the model. Thus, a comparison between the different approaches for lane-changing prediction based on different input variables, structure of the model, traffic environment, and performance evaluations has been developed and presented comparatively. This allows readers to select the appropriate approach from the existing methods to develop new ML-based models. The performance of the existing models is also given in this review, which helps with the selection of the appropriate method when developing the new models.
The lane-changing behaviors considered in the different contributions constitute of LCR, LK, and LCL. The environmental variables are mainly used as inputs in the models as these variables provide state of the ego/surrounding vehicle’s and operational information which affect the driver’s decision to change lanes. The eye-tracking/head-tracking are also used in some approaches to estimate a lane change. Based on different contributions, it can be concluded that, in general, eye-tracking data do not significantly contribute to providing better estimations of lane-changing behaviors, with the exception of a selected few. While physiological variables have been used in very few contributions; the results based on incorporating these variables show their potential in future studies. The performance values of the models reviewed are within the same range; thus, it cannot be concluded that one approach outperforms the other. Also, the performance based on combined approaches is better than using an approach by itself. However, limitations still exist in the approaches as discussed. For example, ANN-based models require a higher volume of data to train effectively, while the SVM tends to underperform when there are a large number of classes. On the other hand, the HMM-based model is not generalizable and requires a number of hidden states to be selected prior to training, limiting the performance of the model. Therefore, future research should develop ways to effectively tackle these problems.
7 Ongoing development and recognizable future trends
Improvements to the ML-based models are necessary to bridge the limitation gap. The limitations and improvements required in the future are described in this section.
ANN: ANN often requires a lot of data to be able to learn effectively and recognize patterns accurately. Thus, it can take a longer time to reach an optimal output. Combined with another approach, ANN can tackle this problem in certain cases; however, this is time consuming and computationally costly. Hence, a method needs to be developed to improve the computational load and produce an optimal network at the same time.
HMM: Models with different parameters are needed for different drivers, making it laborious and not generalizable. Thus, a method to define the model with optimal parameters that is generalizable with different driving data sets is necessary. In addition, as mentioned, the HMM requires hyperparameters, such as the number of hidden states to be defined prior to the training, making it unsuitable for long-term predictions. Therefore, an effective way to handle this should be researched in the future.
SVM: Support vector machines show low performance when the number of classes increases or the number of input variables are more than that of the samples. While existing literatures incorporate another ML-based approach to solve this problem, the complexity and the computational time increase. Thus, future research should find an effective way to handle this drawback.
In addition, the future research studies that deal with developing models for the prediction and recognition of lane-changing behaviors can use this contribution as a guide to select the most appropriate model/combined model and driving features (as input variables) for an improved performance, thus enabling the improvement of existing ADAS for improved driving behavior predictions to avoid road accidents.
Author contributions
RD and DS generated the concept of the review, and DS contributed to the monitoring of the study. RD was involved in the research and analysis of the content details and wrote the initial manuscript, while DS continuously revised it. Both authors reviewed and approved the final version of the manuscript. Both authors and contributed to the manuscript in the same way and approved the submitted version.
Funding
Support by the Open Access Publication Fund of the University of Duisburg-Essen is gratefully acknowledged. This research is partly supported by the Deutscher Akademischer Austauschdienst (DAAD) scholarship received by first author for her Ph.D. study at the Chair of Dynamics and Control, University of Duisburg-Essen, Germany.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Berndt, H., Emmert, J., and Dietmayer, K. (2008). “Continuous driver intention recognition with hidden markov models,” in 2008 11th International IEEE Conference on Intelligent Transportation Systems, Beijing, China, 12-15 October 2008 (IEEE), 1189–1194. doi:10.1109/ITSC.2008.4732630
Cortes, C., and Vapnik, V. (2004). Support-vector networks. Mach. Learn. 20, 273–297. doi:10.1007/bf00994018
Deng, Q., and Söffker, D. (2022). A review of hmm-based approaches of driving behaviors recognition and prediction. IEEE Trans. Intelligent Veh. 7, 21–31. doi:10.1109/TIV.2021.3065933
Deng, Q., and Söffker, D. (2018). “Improved driving behaviors prediction based on fuzzy logic-hidden markov model (fl-hmm),” in 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26-30 June 2018 (IEEE). doi:10.1109/IVS.2018.8500533
Deng, Q., Wang, J., Hillebrand, K., Benjamin, C. R., and Söffker, D. (2020). Prediction performance of lane changing behaviors: A study of combining environmental and eye-tracking data in a driving simulator. IEEE Trans. Intelligent Transp. Syst. 21, 3561–3570. doi:10.1109/TITS.2019.2937287
Deng, Q., Wang, J., and Söffker, D. (2018). “Prediction of human driver behaviors based on an improved hmm approach,” in 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26-30 June 2018 (IEEE). doi:10.1109/IVS.2018.8500717
Díaz-Álvarez, A., Clavijo, M., Jiménez, F., Talavera, E., and Serradilla, F. (2018). Modelling the human lane-change execution behaviour through multilayer perceptrons and convolutional neural networks. Transp. Res. Part F Traffic Psychol. Behav. 56, 134–148. doi:10.1016/j.trf.2018.04.004
Doshi, A., and Trivedi, M. M. (2009). On the roles of eye gaze and head dynamics in predicting driver’s intent to change lanes. IEEE Trans. Intelligent Transp. Syst. 10, 453–462. doi:10.1109/TITS.2009.2026675
Dou, Y., Yan, F., and Feng, D. (2016). “Lane changing prediction at highway lane drops using support vector machine and artificial neural network classifiers,” in 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12-15 July 2016 (IEEE). doi:10.1109/AIM.2016.7576883
Fernández, A., García, S., Galar, M., Prati, R. C., Krawczyk, B., and Herrera, F. (2018). Learning from imbalanced data sets. New York, NY, United States: Springer International Publishing.
Griesbach, K., Beggiato, M., and Hoffmann, K. H. (2021). Lane change prediction with an echo state network and recurrent neural network in the urban area. IEEE Trans. Intelligent Transp. Syst. 1, 6473–6479. doi:10.1109/TITS.2021.3058035
Gu, X., Yu, J., Han, Y., Han, M., and Wei, L. (2019). “Vehicle lane change decision model based on random forest,” in 2019 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 12-14 July 2019 (IEEE), 115–120. doi:10.1109/ICPICS47731.2019.8942520
Han, T., Jing, J., and Özgüner, Ã. (2019). “Driving intention recognition and lane change prediction on the highway,” in 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 09-12 June 2019 (IEEE), 957–962. doi:10.1109/IVS.2019.8813987
Izquierdo, R., Parra, I., Muñoz-Bulnes, J., Fernández-Llorca, D., and Sotelo, M. A. (2017). “Vehicle trajectory and lane change prediction using ann and svm classifiers,” in 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16-19 October 2017 (IEEE). doi:10.1109/ITSC.2017.8317838
Izquierdo, R., Quintanar, A., Parra, I., Fernández-Llorca, D., and Sotelo, M. A. (2019). “Experimental validation of lane-change intention prediction methodologies based on cnn and lstm,” in 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27-30 October 2019 (IEEE), 3657–3662. doi:10.1109/ITSC.2019.8917331
Jardim, D., Nunes, L., and Dias, M. S. (2015). Human activity recognition and prediction. Libson: Portugal Scitepress.
Jiang, B., and Fei, Y. (2015). “Traffic and vehicle speed prediction with neural network and hidden markov model in vehicular networks,” in 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea (South), 28 June 2015 - 01 July 2015 (IEEE), 1082–1087.
Jin, H., Duan, C., Liu, Y., and Lu, P. (2020). Gauss mixture hidden markov model to characterise and model discretionary lane-change behaviours for autonomous vehicles. IET Intell. Transp. Syst. 14, 401–411. doi:10.1049/iet-its.2019.0446
Kang, H. B. (2013). “Various approaches for driver and driving behavior monitoring: A review,” in 2013 IEEE International Conference on Computer Vision Workshops, Sydney, NSW, Australia, 02-08 December 2013 (IEEE), 616–623. doi:10.1109/ICCVW.2013.85
Kasper, D., Weidl, G., Dang, T., Breuel, G., Tamke, A., and Rosenstiel, W. (2011). “Object-oriented bayesian networks for detection of lane change maneuvers,” in 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 05-09 June 2011 (IEEE), 673–678. doi:10.1109/IVS.2011.5940468
Klitzke, L., Koch, C., and Köster, F. (2020). “Identification of lane-change maneuvers in real-world drivings with hidden markov model and dynamic time warping,” in 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20-23 September 2020 (IEEE). doi:10.1109/ITSC45102.2020.9294481
Koenig, A., Rehder, T., and Hohmann, S. (2017). “Exact inference and learning in hybrid bayesian networks for lane change intention classification,” in 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11-14 June 2017 (IEEE), 1535–1540. doi:10.1109/IVS.2017.7995927
Kumar, P., Perrollaz, M., Lefèvre, S., and Laugier, C. (2013). “Learning-based approach for online lane change intention prediction,” in 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23-26 June 2013 (IEEE), 797–802. doi:10.1109/IVS.2013.6629564
Leonhardt, V., and Wanielik, G. (2017). “Neural network for lane change prediction assessing driving situation, driver behavior and vehicle movement,” in 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16-19 October 2017 (IEEE). doi:10.1109/ITSC.2017.8317832
Leonhardt, V., and Wanielik, G. (2018). “Recognition of lane change intentions fusing features of driving situation, driver behavior, and vehicle movement by means of neural networks,” in Advanced microsystems for automotive applications 2017. Editors C. Zachäus, B. Müller, and G. Meyer (Cham: Springer International Publishing), 59–69.
Li, K., Wang, X., Xu, Y., and Wang, J. (2016a). Lane changing intention recognition based on speech recognition models. Transp. Res. Part C Emerg. Technol. Elsevier. 69, 497–514. doi:10.1016/j.trc.2015.11.007
Li, X., Roetting, M., and Wang, W. (2016b). “Bayesian network-based identification of driver lane-changing intents using eye tracking and vehicle-based data,” in 2016 advanced vehicle engineering conference (AVEC) (London:Taylor and Francis Group).
Li, M., Wang, W., Ranjitkar, P., and Chen, T. (2017). Identifying drunk driving behavior through a support vector machine model based on particle swarm algorithm. Adv. Mech. Eng. 9, 168781401770415. doi:10.1177/1687814017704154
Li, Y., Wang, F., Ke, H., Wang, L., and Xu, C. (2019). A driver’s physiology sensor-based driving risk prediction method for lane-changing process using hidden markov model. Sensors 19, 2670. doi:10.3390/s19122670
Liang, Y., Reyes, M. L., and Lee, J. D. (2007). Real-time detection of driver cognitive distraction using support vector machines. IEEE Trans. intelligent Transp. Syst. 8, 340–350. doi:10.1109/tits.2007.895298
Liebner, M., Ruhhammer, C., Klanner, F., and Stiller, C. (2013). “Generic driver intent inference based on parametric models,” in 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, Netherlands, 06-09 October 2013 (IEEE), 268–275. doi:10.1109/ITSC.2013.6728244
Lin, N., Zong, C., Tomizuka, M., Song, P., Zhang, Z., and Li, G. (2014). An overview on study of identification of driver behavior characteristics for automotive control. Math. Problems Eng. 2014, 1–15. doi:10.1155/2014/569109
Liu, S., Zheng, K., Zhao, L., and Fan, P. (2020). A driving intention prediction method based on hidden markov model for autonomous driving. Comput. Commun. 157, 143–149. doi:10.1016/j.comcom.2020.04.021
López, V., Fernández, A., García, S., Palade, V., and Herrera, F. (2013). An insight into classification with imbalanced data: Empirical results and current trends on using data intrinsic characteristics. Inf. Sci. 250, 113–141. doi:10.1016/j.ins.2013.07.007
Mandalia, H. M., and Salvucci, M. D. D. (2005). Using support vector machines for lane-change detection. Proc. Hum. Factors Ergonomics Soc. Annu. Meet. 49, 1965–1969. doi:10.1177/154193120504902217
Martinez, C., Heucke, M., Wang, F. Y., Gao, B., and Cao, D. (2018). Driving style recognition for intelligent vehicle control and advanced driver assistance: A survey. IEEE Trans. Intelligent Transp. Syst. 19, 666–676. doi:10.1109/TITS.2017.2706978
McCall, J., Trivedi, M., Wipf, D., and Rao, B. (2005). “Lane change intent analysis using robust operators and sparse bayesian learning,” in 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05) - Workshops, San Diego, CA, USA, 21-23 September 2005 (IEEE). doi:10.1109/CVPR.2005.482
Meyer-Delius, D., Plagemann, C., and Burgard, W. (2009). “Probabilistic situation recognition for vehicular traffic scenarios,” in 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12-17 May 2009 (IEEE), 459–464. doi:10.1109/ROBOT.2009.5152838
Miyajima, C., and Takeda, K. (2016). Driver-behavior modeling using on-road driving data: A new application for behavior signal processing. IEEE Signal Process. Mag. 33, 14–21. doi:10.1109/MSP.2016.2602377
Mostert, W., Malan, K., and Engelbrecht, A. (2018). “Filter versus wrapper feature selection based on problem landscape features,” in Proceedings of the genetic and evolutionary computation conference companion (New York, NY, USA: Association for Computing Machinery), 1489–1496. doi:10.1145/3205651.3208305
Murphey, Y. L., Kochhar, D. S., Watta, P., Wang, X., and Wang, T. (2015). Driver lane change prediction using physiological measures. SAE Int. J. Transp. Saf. 3, 118–125. doi:10.4271/2015-01-1403
Powers, D. M. (2011). Evaluation: From precision, recall and f-measure to roc, informedness, markedness and correlation. arXiv.
Rabiner, L. (1989). A tutorial on hidden markov models and selected applications in speech recognition. Proc. IEEE 77, 257–286. doi:10.1109/5.18626
Schlechtriemen, J., Wirthmueller, F., Wedel, A., Breuel, G., and Kuhnert, K. D. (2015). “When will it change the lane? A probabilistic regression approach for rarely occurring events,” in 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea (South), 28 June 2015 - 01 July 2015 (IEEE), 1373–1379. doi:10.1109/IVS.2015.7225907
Sharath, M. N., and Mehran, B. (2021). A literature review of performance metrics of automated driving systems for on-road vehicles. Front. Future Transp. 2, 759125. doi:10.3389/ffutr.2021.759125
Statistisches Bundesamt (2020). Driver-related causes of accidents involving perdonal injury in road traffic. Avaliable At: https://www.destatis.de/EN/Themes/Society-Environment/Traffic-Accidents/_node.html.
Su, S., Mülling, K., Dolan, J., Palanisamy, P., and Mudalige, P. (2018). “Learning vehicle cooperative lane-changing behavior from observed trajectories in the ngsim dataset,” in Proceedings of IEEE Intelligent Vehicles Symposium, Suzhou, China, 26 June, 2018–30 June, 2018(IEEE).
Tomar, R. S., Verma, S., and Tomar, G. S. (2011). “Svm based trajectory predictions of lane changing vehicles,” in 2011 International Conference on Computational Intelligence and Communication Networks, Gwalior, India, 07-09 October 2011 (IEEE), 716–721. doi:10.1109/CICN.2011.156
Tran, D., Sheng, W., Liu, L., and Liu, M. (2015). “A hidden markov model based driver intention prediction system,” in 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 08-12 June 2015 (IEEE), 115–120.
Ulbrich, S., and Maurer, M. (2015). “Situation assessment in tactical lane change behavior planning for automated vehicles,” in 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15-18 September 2015 (IEEE), 975–981. doi:10.1109/ITSC.2015.163
Vetturi, D., Tiboni, M., Maternini, G., and Bonera, M. (2020). Use of eye tracking device to evaluate the driver’s behaviour and the infrastructures quality in relation to road safety. Transp. Res. Procedia 45, 587–595. doi:10.1016/j.trpro.2020.03.053
Wang, F., Zhang, J., and Li, S. (2019). “Recognition of dangerous driving behaviors based on support vector machine regression,” in 2019 Chinese Control Conference (CCC), Guangzhou, China, 27-30 July 2019 (IEEE), 7774. doi:10.23919/ChiCC.2019.8865491
Wang, X., Murphey, Y. L., and Kochhar, D. S. (2016). “Mts-deepnet for lane change prediction,” in 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24-29 July 2016 (IEEE), 4571–4578. doi:10.1109/IJCNN.2016.7727799
Weidl, G., Madsen, A. L., Tereshchenko, V., Zhang, W., Wang, S., and Kasper, D. (2016). “Situation awareness and early recognition of traffic maneuvers,” in EUROSIM congress on modelling and simulation (Oulu, Finland: AMIDST).
Wissing, C., Nattermann, T., Glander, K. H., Hass, C., and Bertram, T. (2017). Lane change prediction by combining movement and situation based probabilities. IFAC-PapersOnLine 50, 3554–3559. doi:10.1016/j.ifacol.2017.08.960
Word Health Organization (2018). Global status report on road safety 2018. Avaliable At: https://www.who.int/publications/i/item/WHO-NMH-NVI-18.20.
Xiong, X., Chen, L., and Liang, J. (2018). A new framework of vehicle collision prediction by combining svm and hmm. IEEE Trans. Intelligent Transp. Syst. 19, 699–710. doi:10.1109/TITS.2017.2699191
You, F., Li, Y., Schroeter, R., Friedrich, J., and Wang, J. (2017). Using eye-tracking to help design hud-based safety indicators for lane changes. New York, NY, USA: Association for Computing Machinery. doi:10.1145/3131726.3131757
Yuan, W., Li, Z., and Wang, C. (2018). Lane-change prediction method for adaptive cruise control system with hidden markov model. Adv. Mech. Eng. 10, 168781401880293. doi:10.1177/1687814018802932
Keywords: advanced driving assistance systems, machine learning methods, driving behavior prediction, driving behavior recognition, lane changing
Citation: David R and Söffker D (2023) A review on machine learning-based models for lane-changing behavior prediction and recognition. Front. Future Transp. 4:950429. doi: 10.3389/ffutr.2023.950429
Received: 22 May 2022; Accepted: 09 January 2023;
Published: 24 January 2023.
Edited by:
Leise Kelli De Oliveira, Federal University of Minas Gerais, BrazilReviewed by:
Iman Abu Hashish, American University of Madaba, JordanJose Elievam Bessa Junior, Federal University of Minas Gerais, Brazil
Copyright © 2023 David and Söffker. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Ruth David, cnV0aC5kYXZpZEB1bmktZHVlLmRl