 Massimo Di Gangi
Massimo Di Gangi Antonio Polimeni
Antonio Polimeni- Dipartimento di Ingegneria, Università degli Studi di Messina, Messina, Italy
In assignment models, a key role is played by the path choice simulation that evaluates the path chosen by users in relation to the perceived paths and relative costs. This study deals with the effects of the implementation of some most adopted path choice models (Logit, Weibit, Probit, and Gammit) within a Stochastic User Equilibrium assignment procedure. Some considerations on parameters needed to make results comparable and the method used to estimate them are also suggested some extensions based on Weibit model are proposed. Results obtained both on a test network and on a real one are reported.
1 Introduction
In this study, the simulation of the users’ path choice behavior is evaluated by considering different random utility models (RUM).
Path choice is simulated once the origin and destination of the travel, the departure time, and the transport mode have been defined. It is a component of assignment models that can be formulated as a combination of a demand model and a supply model that, in the search for equilibrium between demand and supply, leads to a fixed-point problem (Cantarella, 1997). It is generally assumed that users perceive trip time or cost in a random form. Different authors have considered the statistical distributions of the perceived trip times as belonging to different families.
Starting from the generalized extreme value (GEV) class of models, proposed by McFadden (1978), many models for path choice have been formulated, such as multinomial Logit, C-Logit, path-size Logit, nested Logit, cross-nested Logit, and link-nested models (Manski and McFadden, 1981; Ben-Akiva and Lerman, 1985; Cascetta et al., 1996; Ben-Akiva and Bierlaire, 1999), where Gumbel-distributed random costs are considered. The main advantage of assuming the GEV distributions is that these models are closed under maximization, which means a simple and tractable choice function. Castillo et al. (2008) introduced a closed-form expression for the choice probabilities in the case of independent Weibull-distributed random costs.
By introducing a more general structure of the covariance matrix of the joint distribution of the random residuals (and of the utilities), Daganzo and Sheffi (1977), Sheffi (1985), Rosa and Maher (2002), Yai et al. (1997), and Sheffi and Powell (1982) analyzed the probit model that assumes a normal distribution. Cantarella and Binetti (2002) analyzed the gammit model that assumes a gamma distribution in order to avoid positive perceived utility values, as allowed by a normal distribution. Recently, considering the lack of information on one or more alternatives, other classes of path choice models have been proposed, such as quantum utility models (QUM) (Vitetta, 2016; Di Gangi and Vitetta, 2018) and fuzzy utility models (De Maio and Vitetta, 2015).
Aim of this study is to analyze the effects of the practical implementation of different path choice models based on random utility theory (Logit, Weibit, Probit, and Gammit) within a stochastic user equilibrium (SUE) assignment procedure. Particular attention was paid to the parameters needed to make results from different models comparable. The path choice models are crucial for the assignment models, both for private vehicles (Cantarella and Fiori, 2022; Wang et al., 2019; Di Gangi et al., forthcoming) and transit (Nuzzolo and Comi, 2016; Nuzzolo and Comi, 2018). There are two main approaches: explicit path enumeration or implicit path enumeration (Quattrone and Vitetta, 2011). In implicit field can be cited (Russo and Vitetta, 2003; Antonisse et al., 1989) while in explicit field can be cited (Fosgerau et al., 2013; Mai et al., 2015; Comi and Polimeni, 2022). A review on path choice models is reported in (Prashker and Bekhor, 2004) and (Prato, 2009).
The main original contributions of this study are as follows:
• extensions of a stochastic loading procedure based on path costs following a Weibull distribution with the implementation of a weibit loading procedure that does not require explicit path enumeration;
• some considerations on how to define model parameters in order to make results comparable;
• a comparison of the performances of the considered models obtained both on a test and on a real network.
The advantage in using a Weibull distribution is twofold: 1) the choice probability can be calculated in a closed form, and 2) the dependence of the variance on the path cost allows having different variance values for different o/d pairs, overcoming the issue of Logit models where the variance is the same for all o/d pairs.
Considering the structure of this article, in Section 2, after the description of some requirements for path choice models (2.1), a short summary of the considered RUM (2.2) and some operational considerations regarding the implementation of the considered path choice models (2.3) are described. In Section 3, which concerns stochastic network assignment, an extension based on the weibit model is reported, particularly a loading procedure that does not require explicit path enumeration. In Section 4, some results obtained by carrying out tests both on a simple network (4.1) and on a real network (4.2) are presented. In this last case, results are compared by considering the performances obtained on a real system. Finally, Section 5 contains a summary of the obtained results and some indications for further developments.
2 Modeling Path Choice Behavior
2.1 Requirements for Path Choice Models
Following (Cantarella et al., 2020), some requirements useful in classifying path choice models are, for the convenience of the reader, summarized in the following, where the classification of the requirements is carried out both from a mathematical and modeling point of view. It is worth noting that these requirements hold whatever is the theory behind the path choice models. In this paper, path choice models derived from the theory of random utilities will be considered.
2.1.1 Mathematical Requirements
Under the assumptions of linear utility functions, mathematical requirements allow effectively modeling any choice behavior. Considering, in particular, a path choice model, the main requirements are the continuity and monotonicity of the utility function. Then, the model can be specified by a function if the values and random residuals of the perceived utility are assumed distributed as continuous random variables with a nonsingular covariance matrix. In order to guarantee that small changes of path costs induce small changes of choice probabilities, the continuity of the path choice model must be assured (note that if the model is also differentiable, the Jacobian is continuous). This feature, assured by commonly used joint probability density functions, guarantees the continuity of the resulting arc flow function. Thus, it is useful to state the existence of SUE. The assurance that an increase in cost of a path corresponds to a decrease of its choice is given by the monotonicity of the path choice function. More generally, the path choice function should be nonincreasing monotone with respect to path costs. This feature guarantees the monotonicity of the resulting arc flow function. Thus, it is useful to state the uniqueness of the solution of SUE. If any change of the scale of the utility does not affect the model, the choice model has the independence from linear transformations of utility property.
2.1.2 Modeling Requirements
Modeling requirements are also useful to effectively simulate path choice behavior. Considering the similarity of perception of partially overlapping paths allows us to avoid counter-intuitive results. In the case of two partially overlapping paths, a positive covariance between them can simulate their similarity because they are likely not perceived as two totally separated paths. This covariance can be specific to the distribution (e.g., Probit and Gammit) or can be induced through modifications of utilities (e.g., C-Logit, path-size Logit, and C-Weibit; the latter is introduced later in this article).
Considering the network model, if an arc can be divided into subarcs, redefining arc costs so that path costs are not affected, this does not affect the perceived utility or random residual distribution of paths and, consequently, choice probabilities. Because this requirement makes reference to the features of the distribution of the sum of random variables, two approaches can be identified to specify perceived utility distribution: 1) direct formulations of probabilistic path choice models, where the distribution of path-perceived utility or random residuals is explicitly specified, and 2) indirect formulations, where path-perceived utility or random residual distribution is specified as a linear combination of arc-perceived utilities (specifying their distribution), even though the analysis of path choice behavior is still carried out at the path level. The independence from arc segmentation mainly requires the use of reproductive random variables. For instance, the sum of several independently distributed normal random variables is still a normal random variable, with the mean given by the sum of the means and variance by the sum of the variances. This feature is also shown by independently distributed gamma random variables with the same variance-to-mean ratio. In both cases, if the arcs in a path are further segmented, provided that the mean path cost and the variance are not affected by segmentation, the resulting path-perceived utility distribution (and then the choice probability) is not affected by segmentation. Generally, the arc flow function with any arc-formulated choice model can be easily computed, if arc-perceived utilities are assumed independently distributed, through Monte Carlo techniques (introduced by Burrel, 1968; see also Sheffi, 1985). Traveling along a path, users perceive a cost that is usually considered a negative utility. The negativity of perceived utility assures that no user perceives a positive utility to travel along any path. This feature can be assured by assuming lower bounded random distributions (for instance log-normal or gamma). If this feature is not presented, it means that a nonelementary path may be a better choice than the elementary path within it, possibly leading to unrealistic situations (a part from some algorithmic drawbacks).
2.1.3 Notations
For the convenience of the reader, Table 1 reports the symbols (grouped by type) used throughout the article (in any case, the meaning of each symbol is recalled each time it is used).
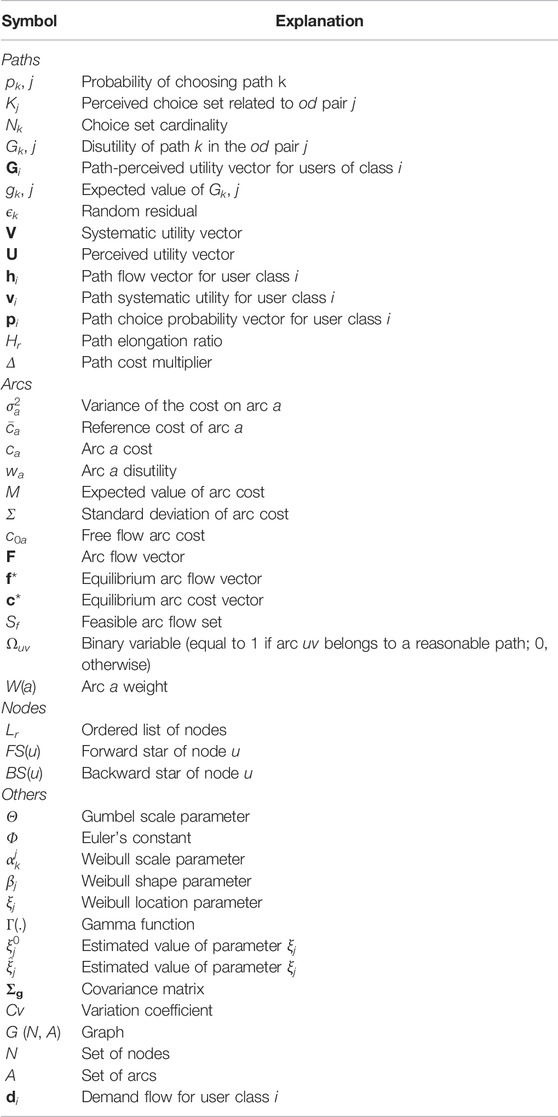
TABLE 1. Symbols.
2.2 Random Utility Path Choice Models
Given an origin/destination (o/d) pair j, the analyst evaluates the probability pk,j of choosing path k belonging to the perceived choice set of paths Kj. Disutility Gk,j can be expressed as follows:
where gk,j = E [Gk,j] is the expected value of the disutility (cost) of path k and ϵk is the random residual.
Possible models for the evaluation of probabilities (deriving from the hypotheses on random variable Gk,j distribution) are described in the following. Even if they can be classified on the basis of the requirements described in Section 2.1, for the sake of simplicity, description is here conducted on the basis of the existence (or not) of a closed form to define choice probabilities.
2.2.1 Closed-Form Probability Formulation
Multinomial Logit and Weibit model assumptions entail that the covariance matrix of the joint distribution of the random residuals (and of the utilities) is a diagonal matrix with nonzero entries. From a mathematical point of view, Multinomial Logit and Weibit models satisfy the continuity and monotonicity requirements, but independence from linear transformations of utility requirements are not satisfied. From a modelistic point of view, the requirements regarding the similarity of perception of partially overlapping paths are not satisfied because of the general structure of the covariance matrix. In addition, independence from arc segmentation is not assured, and perceived utility distribution is specified in path. The negativity of perceived utility requirement is formally satisfied by multinomial weibit but not by multinomial logit because random residuals, following a Gumbel distribution, can assume negative values (that is a positive disutility), which implies a decrease in path cost.
2.2.1.1 Multinomial Logit
In the Multinomial Logit model, it is assumed that the path costs Gk,j are identical and independently distributed as a Gumbel random variable.
In particular, utility can be expressed as Gk,j = −(gk,j + ϵk), where − gk,j = E [Gk,j] is the expected value of the utility (cost) of path k, and random residuals -ϵk are independently and identically distributed (i.i.d.) as a Gumbel random variable of zero mean and scale parameter θ (Ben-Akiva and Lerman, 1985; Domencich and McFadden, 1975).
The marginal probability distribution function of each random residual can be written as follows Cascetta (2009):
where Φ is the Euler’s constant. For multinomial logit, it is assumed that the mean and variance of the Gumbel distribution are, respectively, as follows:
The specification of probability for Multinomial Logit is as follows:
where θj is the distribution parameter related to the choice set Kj.
2.2.1.2 Multinomial Weibit
The Weibit model assumes that the path costs Gk,j are independently distributed as a
where
•
• βj is a shape parameter;
• ξj is a location parameter.
The mean and variance are, respectively, as follows:
where Γ(.) is the gamma function.
The specification of probability for Multinomial Weibit is (Castillo et al., 2008) as follows:
where
2.2.2 Not Closed-Form Probability Formulation
From a mathematical point of view, Probit and Gammit models satisfy the continuity, monotonicity, and independence from linear transformations of utility requirements. From a modelistic point of view, the requirements regarding the similarity of perception of partially overlapping paths are satisfied because they allow for the general structure of the covariance matrix. In addition, independence from arc segmentation is assured, and perceived utility distribution is specified in arc. Because a closed form is not available for the choice behavior model, an unbiased estimate of arc flows can be computed through a Monte Carlo technique by successively averaging several loading to the shortest paths (Sheffi, 1985; Burrel, 1968). The Monte Carlo technique is used as a numerical tool to compute the path choice probabilities or to enhance the corresponding arc flows. To apply this approach, by virtue of independence from arc segmentation, the path-perceived utility distribution is derived from independently distributed arc random costs. For practical purposes, to apply the Probit or the Gammit model, path-perceived utilities Gi can be specified through arc utilities g, whose expected values are the opposite of arc costs, E [g] = −c, say:
2.2.2.1 Probit
The Probit model or multinomial probit model (MNP) results when the random residuals in Eq. 1 are assumed to be multivariate normally distributed with zero mean and arbitrary covariance matrix (Daganzo, 1983). The utility vector U (index of o/d pair is omitted to simplify notation) of dimension Nk is therefore MVN(V, Σ), and its probability density function is therefore the following:
where V is the systematic utility vector.
With the MNP model, the choice probability of path k belonging to the perceived choice set of paths Kj of cardinality Nk is expressed by the following:
2.2.2.2 Gammit
The Gammit model is obtained by assuming that perceived disutilities are jointly distributed as a nonnegative “shifted” multivariate gamma, with the mean equal to the path costs gk,j and path covariance matrix Σ. Path formulations of the gammit model may be undetermined because the covariance matrix alone does not completely define the joint probability density function of a multivariate gamma random variable. The adopted formulation was proposed by Cantarella and Binetti (2002). It is an arc formulation that overcomes this drawback and, at the same time, assures independence of arc segmentation and rule out positive perceived utilities for any paths. As in Cantarella and Binetti (2002), let
where αa and β are, respectively, the shape parameter and the rate parameter of the gamma function.
This means that the arc-perceived disutility is the sum of a nonnegative deterministic term that can depend on arc flows and a nonnegative stochastic term independent from arc flows. The assumption on arc reference costs yields that the corresponding reference cost
2.3 Implementation of Path Choice Models
This section focuses on some operational considerations regarding the implementation of the considered path choice models. At the end, an application to a simple test network is conducted in order to compare the performances of the considered models. The parameters used to perform the application depend on the considered model. Then, in this section, the parameters needed to implement each model are identified.
2.3.1 Logit
Logit models are based on the Gumbel distribution and, considering Section 2.2.1.1, are characterized only by the parameter θ, which is estimated starting from the variance of path costs Gk as in Eq. 3. In particular, if Sdev [Gk] is the standard deviation of path cost, a variation coefficient Cv can be introduced as follows:
It is possible to define the parameter of the Gumbel distribution from Eq. 3 as follows:
Thus, for the implementation of a logit model, the independent variable to be assumed is Cv.
2.3.2 Weibit
Weibit models are based on a Weibull distribution characterized by three parameters
An estimate of the parameter ξj
Starting from Eq. 6, parameter
and replacing Eq. 15 in Eq. 7 yields the following:
Once the value of variance is assumed, the value of βj can be calculated from Eq. 16. Once βj is known, replacing its value in Eq. 15, it is possible to compute the value of
Referring to Algorithm 1, the initialization involves to set: 1) the variables b0 and b1, 2) the threshold value ι to stop the algorithm, and 3) the initial value of objective function Fn. The procedure is iterated while the objective function Fn is less than ι. At each iteration, a value of βj is obtained, is calculated the variance corresponding to such a value and when the difference with assumed variance is less than ι the procedure is stopped.
Algorithm 1. Procedure for the estimation of the Weibull distribution parameters.
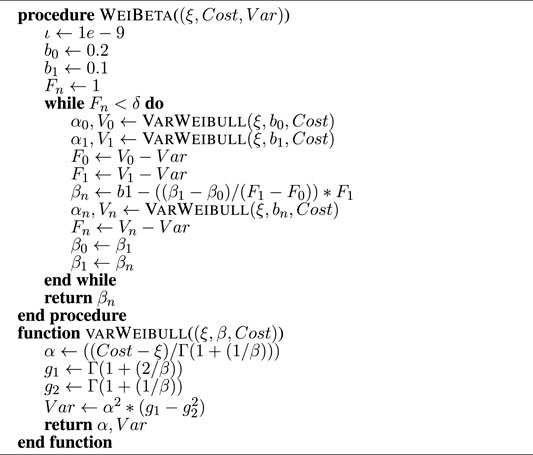
For a practical purpose, owing to a numerical problem that can occur if the difference
Because weibit variance depends, by means of parameter
where Kj is the choice set related to the o-d pair j.Thus, for the implementation of a weibit model, the independent variables to be assumed are Cv and δ.
2.3.3 Probit
As discussed in 2.2.2, the path-perceived utility distribution is derived from independently distributed arc random costs that, for the Probit model, follow a normal distribution characterized by the two parameters μ and σ. For a specific case, the expected value and standard deviation can be expressed as follows:
where
ca is the arc cost;
c0a is the free flow arc cost;
Cv is the variation coefficient.
As discussed above, the Monte Carlo technique is implemented by successive averaging several loading to the shortest paths, so a Nit number of samples have to be carried out. Thus, for the implementation of a probit model, the independent variables to be assumed are Cv and Nit.
2.3.4 Gammit
As discussed in 2.2.2, the path-perceived utility distribution is derived from independently distributed arc random costs that, for the Gammit model, follow a gamma distribution. Following the formulation adopted in 2.2.2.2, a gamma distribution is based on two parameters, which are the following: α > 0 (shape parameter) and β > 0 (rate parameter), and the expected value and variance can be expressed as follows:
For a specific case, the expected value and variance can be expressed as follows:
where
ca is the arc cost;
c0a is the free flow arc cost;
Cv is the variation coefficient.
Thus, the distribution parameters can be estimated as follows:
In addition, in this case, the Monte Carlo technique is implemented by successive averaging several loading to the shortest paths, so a Nit number of samples have to be carried out. Thus, for the implementation of a gammit model, the independent variables to be assumed are Cv and Nit.
3 Stochastic Network Assignment
Transportation supply models express how user behavior affects network performances. They are usually based on congested network models, that is, a graph G (N, A) with a transportation cost ca and a flow fa associated to each arc a in set A. Let Bi be the arc-path incidence matrix for user class i with entries bak = 1 if arc a belongs to path k, bak = 0 otherwise; di ≥ 0 be the demand flow for user class i; hi ≥ 0 be the path flow vector for user class i, with entries hk, k ∈ Ki; f ≥ 0 be the arc flow vector, with entries fa, a ∈ A; c be the arc cost vector, assumed below with nonnegative entries ca, a ∈ A; gi ≥ 0 be the path cost vector for user class i, with entries wk, k ∈ Ki; the following three equations completely describe the transportation supply:
The function in Equation 24 is defined as the arc cost function. Path choice behavior can be simulated by assuming that users’ perception of path costs, for each user class, can be expressed by the perceived utility vector Ui modeled as a random variable given by the sum of the expected value, or systematic utility, vi and a random residual following the random utility theory. The cost attributes associated to a path allow specifying the path systematic utility:
The probability of choosing path k for user class i is given by the probability of path j being the maximum perceived utility one. Hence, the choice probability vector pi depends on the systematic utility (and the parameters of the random residual distribution):
Path flows are thus:
A probabilistic choice model, derived from the random utility theory, specifies Equation 27. Thus, relation pi (vi) is a function.
Combining the above equations yields the path-flow model:
Under mild assumptions, utility distribution parameters (apart the mean) do not depend on systematic utility values (invariant or additive choice models), and this function can be proved monotone increasing with symmetric positive semidefinite Jacobian with respect to path systematic utilities (Cantarella, 1997).
All usually adopted probabilistic choice functions give strictly positive probabilities and are continuous and continuously differentiable with respect to systematic utility. Moreover, if the parameters of the perceived utility pdf do not depend on systematic utility values, the resulting choice function, called invariant, is monotone increasing with respect to systematic utility with symmetric (semidefinite positive) Jacobian (Cantarella (1997); Cascetta (2009)) and choice probabilities depend on differences between systematic utility values only. The (stochastic) arc flow function with a constant demand is obtained by combining supply model (23) and (25) with the path-flow model (29):
that gets values in the feasible arc flow set Sf that is nonempty (if the network is connected), compact (since closed and bounded, if only elementary paths are considered), and convex. The arc flow function (30) is a general model of stochastic assignment to uncongested networks, or SUN for short, and the solution of the SUN depends on the considered choice model. In the case of the logit and weibit family of choice models, either path choice set should be explicitly defined (path enumeration), or for a logit family of path choice model, an implicit procedure such as Dial’s algorithm (Dial, 1971) can be adopted. In general, considering the probit or gammit family of choice models, the computation of the arc flow function (30) requires the well-known Monte Carlo algorithm (Cascetta, 2009). In the following of the paper, some original extensions of the SUN procedure based on path costs following a Weibull distribution are described. Explicit path enumeration can be avoided by considering existing algorithms. Dial’s algorithm (Dial, 1971) is one of the most effective and popular procedures for a logit-type stochastic traffic assignment because it does not require path enumeration over a network. Leaving out the problem associated to the definition of “efficient paths”, which sometimes produces unrealistic flow patterns (Bell, 1995; Leurent, 2005; Si et al., 2010), the attention is here focused on a way to compute the weight associate to each arc considering path costs following a Weibull distribution.
As stated in Castillo et al. (2008), assuming that the costs are independent Weibull, the variance for different costs is different. The variance is, however, functionally dependent on the location parameter so that higher mean cost results in higher variance of the cost. This property may seem quite natural in many applications. But because of the functional dependence, it is not possible to choose the variance independent of the mean for the different choice alternatives. So by representing the costs in a suitable logarithmic form in a logit model or in linear form in a Weibull model lead to the same choice probabilities.
Considering Leurent (2005), in a similar way, it is possible to define the impedance A(a) to be associated to arc a = {u, v} from the expression of probability (8) as follows:
To evaluate arc impedance, it is necessary to define a path containing the arc a = {u, v} in order to estimate the values of parameters β and α; a path is chosen including arc a = {u, v} between the shortest path connecting origin r with the tail node u and shortest path connecting the head node v with destination s. Thus, the value of the path cost to be considered in computing impedance is given by gk,j = Cr(u) + cuv + Cs(v), where Cr(u) is the cost of the shortest path from origin r to node u, cuv is the cost of arc a = {u, v}, and Cs(v) is the cost of the shortest path from node v to destination s. Considering the procedure introduced in point 2.3.2, introducing a variation coefficient Cv = σ/μ, the variance can be estimated as
The weibit network loading summarized in Algorithm 2 allows obtaining the arc flow without the explicit path enumeration. In step 0, after the variable initialization and established an origin r and a destination s, the impedance of each arc a is evaluated. Moreover, the belonging of the arc to a reasonable path is evaluated. Step 1 consists of a forward pass where the weight of each arc is calculated. Finally, step 2 consists of a backward pass allowing the calculation of the flow on each arc.
Algorithm 2. Implicit weibit loading procedure.

The path choice models here considered are also used to model congested situations taking into account the variability of costs as described in the following.SUE assignment can effectively be expressed by fixed-point models given by the arc flow function (30) and the arc cost function Eq. 24:
where Sf is the feasible arc flow set.Algorithms based on the method of successive averages (MSA) (Cantarella, 1997) and (Cascetta, 2009) are the most used ones to solve fixed-point models for SUE assignment because they can accommodate any choice model based on random utility theory and are suitable for large-scale applications.Their basic iteration requires the computation of the cost function Eq. 24 to get arc costs from arc flows and the computation of the arc flow function Eq. 30 to get arc flows from arc costs.Applying the MSA leads to the MSA-FA solution algorithm based on the following recursive equation:
Convergence may be proved if the Jacobian of the arc cost function is symmetric (Cantarella, 1997).
4 Experiments
4.1 Application to a Test Network
The first experiment on a test network was carried out with the aim to compare the performance of the considered models in terms of path choice probabilities in a SUN context. The considered network was a 4 × 4 square network, and in order to simplify the interpretation of the results, only one o/d pair was considered. It is depicted in Figure 1, and the characteristics of the arcs are shown in Table 2. Paths for the o/d pair 1001–2016 were considered, and the list of paths is shown in Table 3, where the first six paths in terms of cost are considered. The choice of the number of considered paths derives from considerations on the number of paths potentially used by the users in order to maximize the coverage between the generated and used paths. From literature (e.g., Cascetta et al., 1996), the number of paths was less than 8. Moreover, the analyses reported in (Cascetta et al., 1996) highlight that the use of the first six paths is a reasonable compromise.
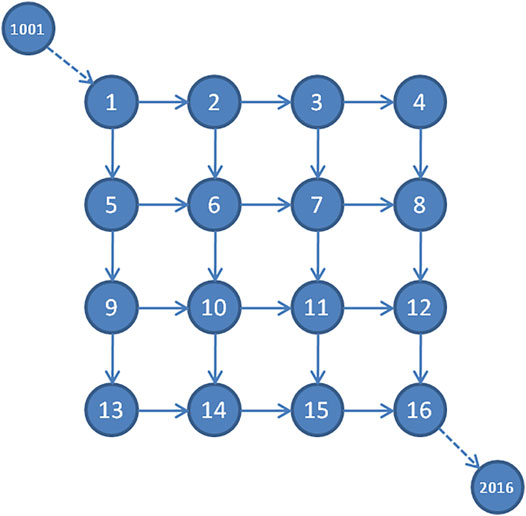
FIGURE 1. Considered test network.
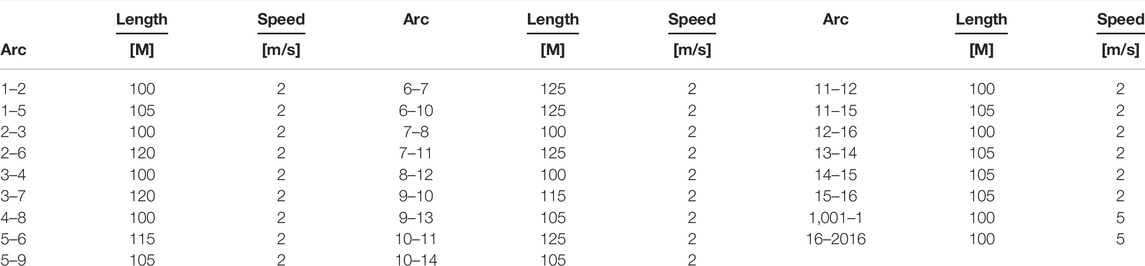
TABLE 2. Characteristics of the arcs of the test network.

TABLE 3. Considered paths of the test network.
Tests were carried out by considering a set of values for the independent variables above defined for each considered model. Considered values of independent variables are shown in Table 4.
TABLE 4. Considered values of the independent variables.
It is worth noting that Cv is used to compute the variance of: path costs → logit and weibit; arc costs → probit and gammit.
4.1.1 Models With Explicit Path Enumeration
The path set considered in this application is obtained with an explicit path enumeration and a selective approach. Then, among all available paths, the first k ones with respect to the path cost are considered. In this application, we set k = 6. Reported results are at first a comparison among choice probabilities obtained for the shortest path for each of the considered models. Then, the probabilities obtained for each one of the six paths are compared. The explanation of the notation adopted in the figures for the considered model is the following:
- Logit → Logit model.
- WMinyyy → Weibit model where, to estimate β, variance is computed considering the minimum value of path costs and yyy indicates the value of δ (0.995, 0.975, 0.925, and 0.900).
- WMedyyy → Weibit model where, to estimate β, variance is computed considering the mean value of path costs and yyy indicates the value of δ (0.995, 0.975, 0.925, and 0.900).
- Probxxx → Probit model where xxx indicates the number of carried out samples Nit (010, 050, 100, and 500).
- Gamxxx → Gammit model where xxx indicates the number of carried out samples Nit (010, 050, 100, and 500).
Comparing logit with weibit models, as shown in Figure 2, the lower the value of parameter δ is, the closer are weibit models to logit one.

FIGURE 2. Path choice probabilities depending on Cv for path 0: Logit vs. Weibit models.
Considering probit and gammit (Figure 3), their behavior is quite similar and a large number of iterations Nit is useful if the variance of costs, that is, the value of Cv, increases.
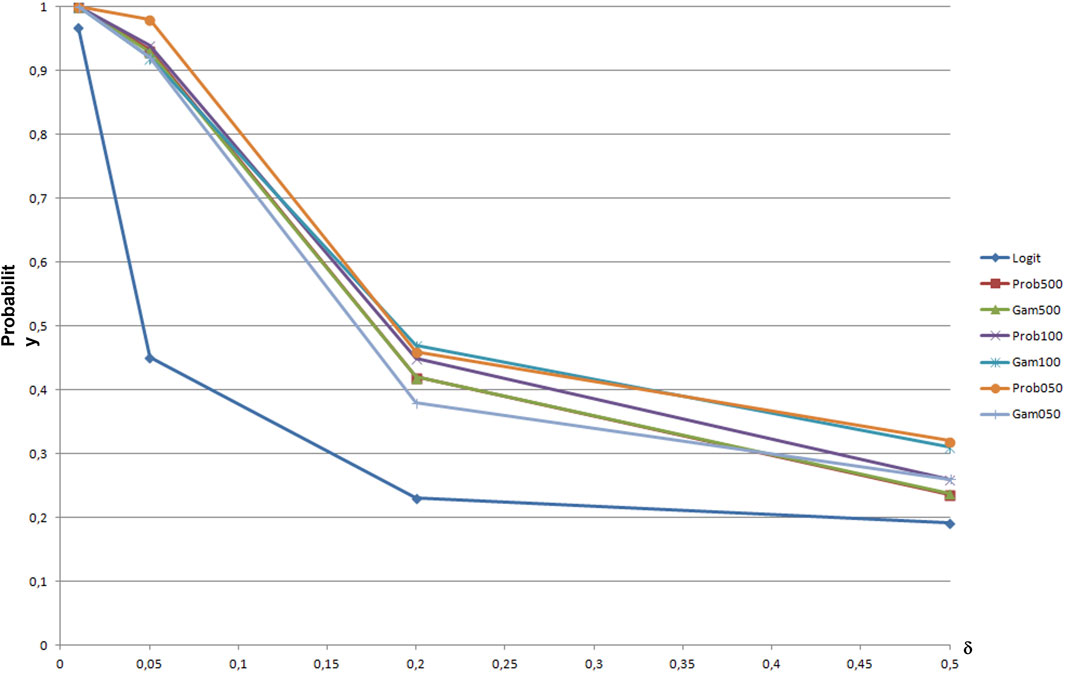
FIGURE 3. Path choice probabilities depending on Cv for path 0: Logit vs. Probit and Gammit models.
In Figure 4 all models are compared considering WeibMed model with δ = 0.995 and gammit and probit with Nit = 500. It can be seen how probit and gammit practically coincide and that the weibit model is quite closer to probit and gammit ones.
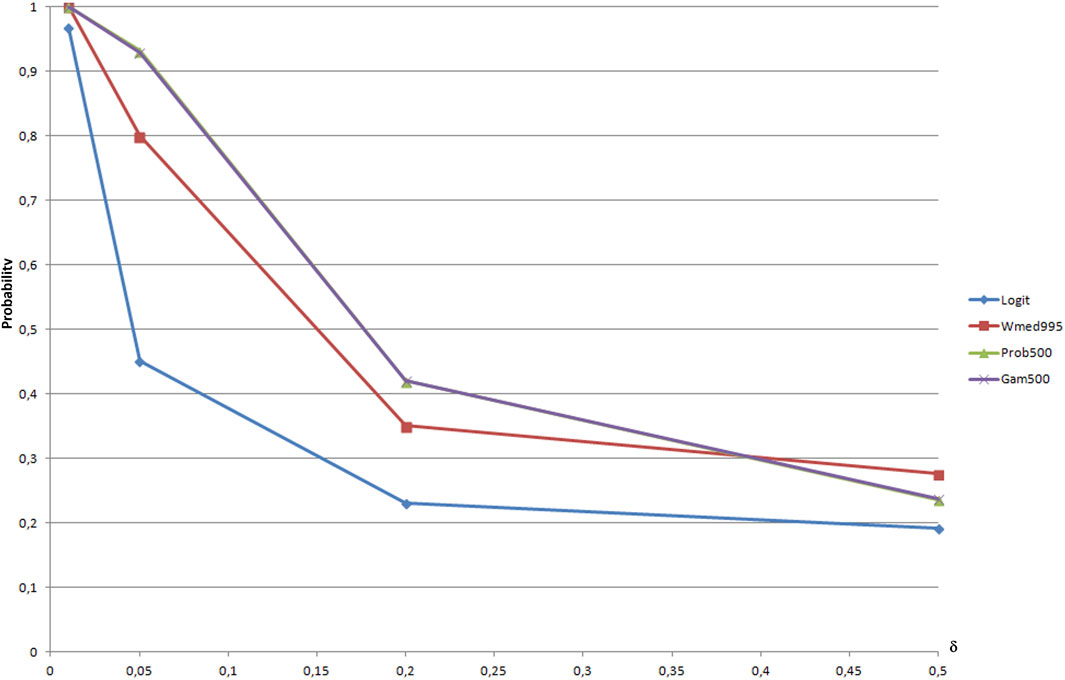
FIGURE 4. Path choice probabilities depending on Cv for path 0: Logit vs. Weibit, Probit, and Gammit best models.
This last comparison has been conducted among all considered paths in Figure 5, and it can be seen that at the increase of variance, differences diminish.

FIGURE 5. Path choice probabilities depending on Cv for each path: Logit vs. Weibit, Probit, and Gammit best models.
4.1.2 Weibit Model Without Explicit Path Enumeration
In this case, tests have been carried out by considering a value of δ = 0.995 and the set of variation coefficient Cv = {0.05, 0.20, 0.50}. A first attempt has been conducted to define the value of the cost multiplier H so that the algorithm considered the largest number of arcs in the network and to make a reasonable comparison between explicit and implicit versions of Weibull path choice. For the considered network, a value of H = 0.4 has been considered because, for lower values, only 50% of links result with flows greater than zero, as shown in Figure 6.
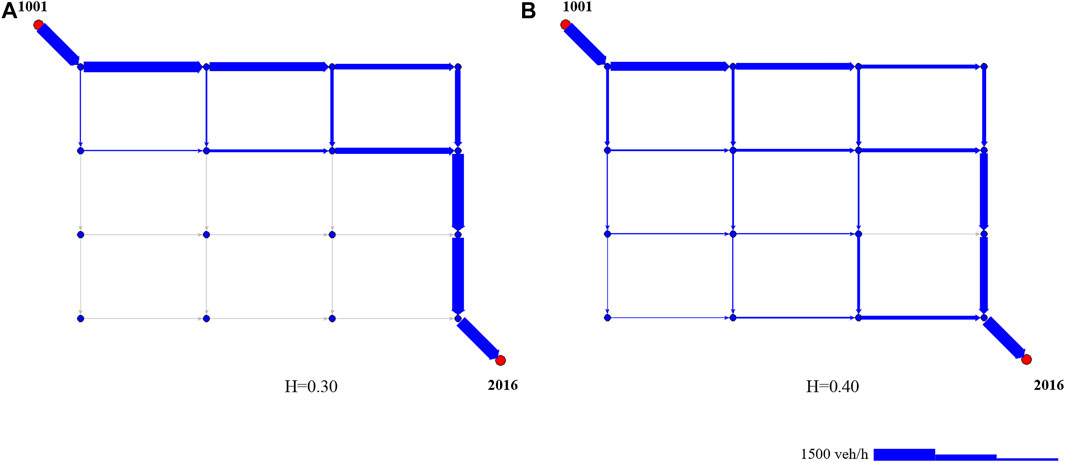
FIGURE 6. Link considered in the implicit loading procedure for values of H =0.30 (A) and H =0.40 (B).
Results are shown by means of a scatter diagram (dots are connected by lines to improve readability) reported in Figure 7, where for each link indicated in the horizontal axis, the values of flows obtained for the two weibit models, with path enumeration (explicit) and without path enumeration (implicit).
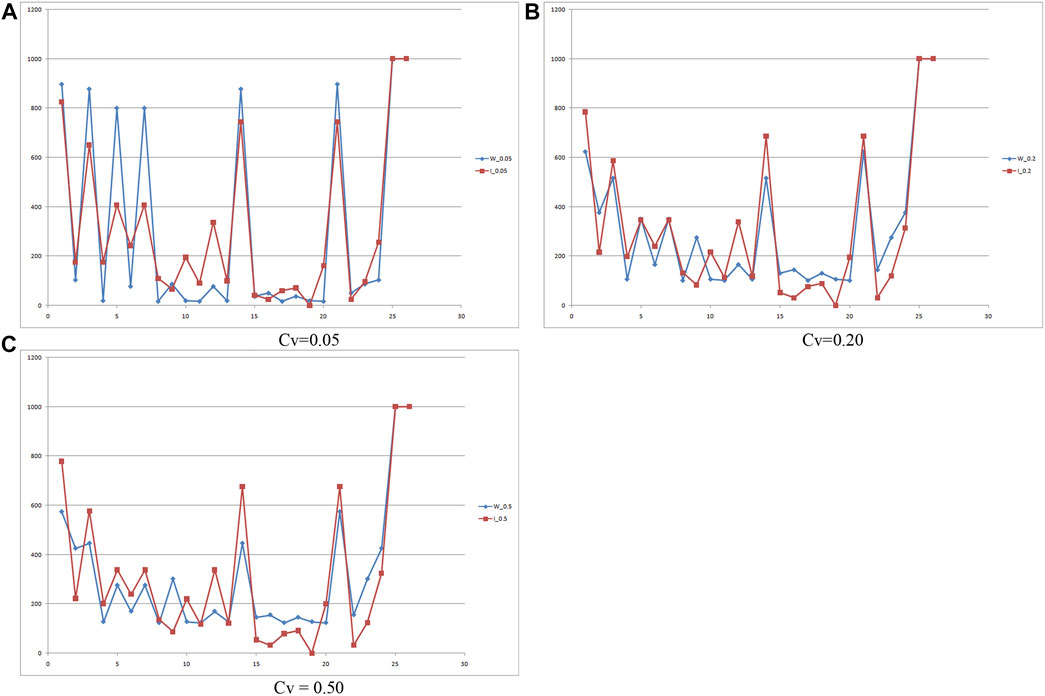
FIGURE 7. Comparison of link flows for values of (A-C) Cv = 0.05, 0.20, 0.50 explicit vs. implicit weibit models.
To compare the values of flows obtained by the explicit Weibit model (fi) with the implicit one
Numerical values are reported in Table 5, where lower values indicate less residual variance.
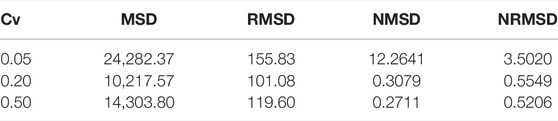
TABLE 5. Comparison of flows explicit weibit vs. implicit weibit.
4.2 Application to a Real Network
This section concerns the comparison of results obtained, in a real context, considering the above-described models applied in a SUE framework in order to explore the capability of reproducing counted flows. Application to a real network allows evaluating model performance on the field by comparing estimated flows with measured ones. Experiments here described have been conducted by considering the road network of Salerno, a town of about 130,000 inhabitants located in southern Italy. The road network has been schematized by means of a graph with 526 nodes and 1,147 arcs connecting 61 internal zones and 13 external ones. Comparisons have been performed by considering observed flows obtained by means of surveys conducted on 69 survey sections. In the adopted stochastic network loading, within the MSA procedure, for those models requiring explicit enumeration of paths, paths have been generated using De la Barra procedure (De La Barra et al., 1993). For each o/d pair, a maximum number of 2,000 iterations have been conducted, considering at most 10 paths not exceeding the 25% of the shortest paths free flow time. Reported results refer to an application considering the values of the independent variables shown in Table 6.
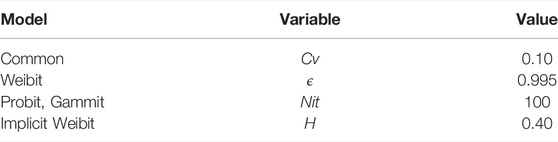
TABLE 6. Considered values of the independent variables in the application to the network of Salerno.
In the MSA-FA algorithm, among the indicators eligible for a stop test (Sheffi, 1985), it has been considered the maximum percentage deviation of flows on arc i, between flow assigned at iteration k
To compare the values of SUE flows obtained by the models (fi) with the measured ones
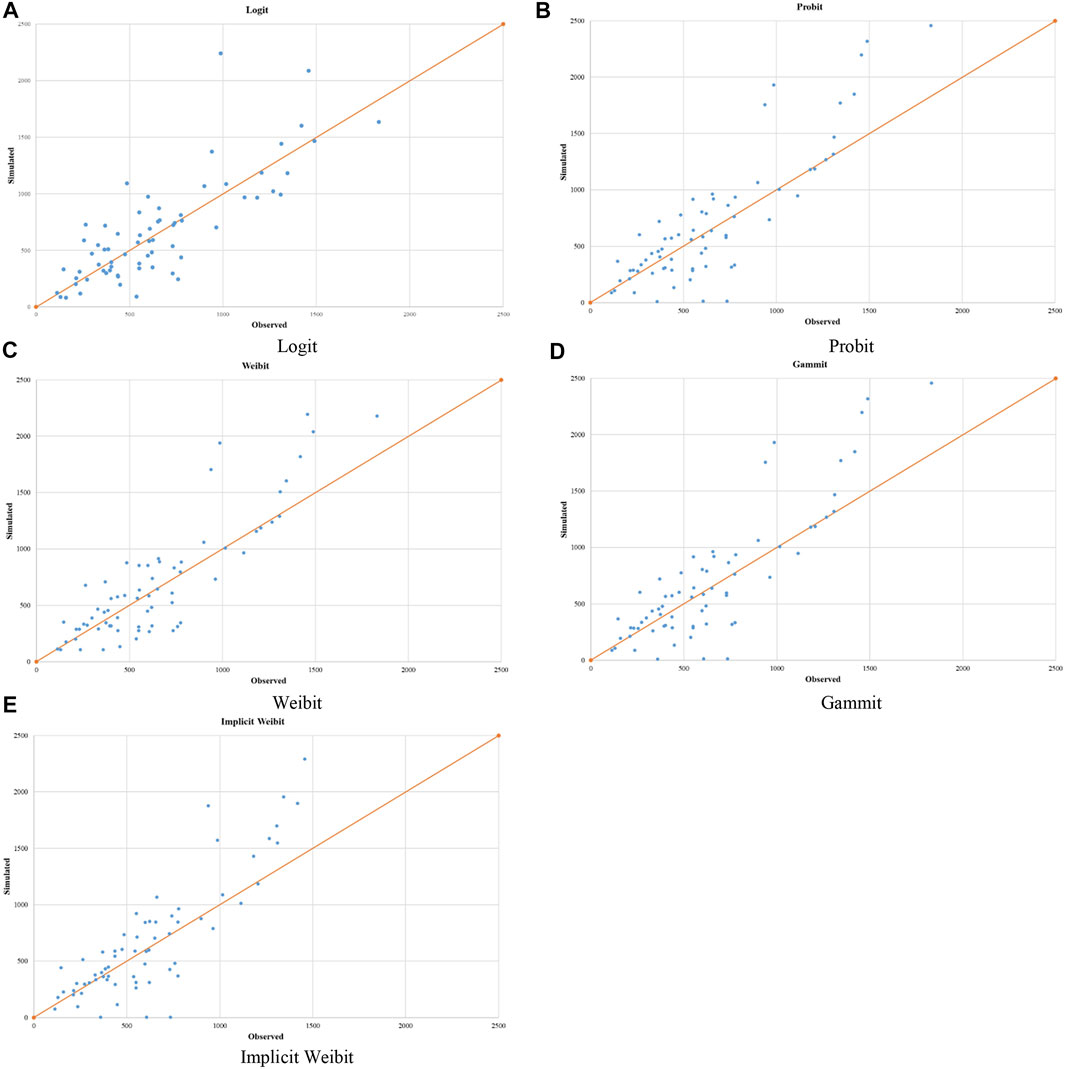
FIGURE 8. Comparison of link flows: observed vs. simulated. (A) Logit (B) Probit (C) Weibit (D) Gammit (E) Implicit Weibit.
Moreover, Table 7 reports, for each model, the frequencies of the bias grouped into intervals with an amplitude of 250 vehicles/h. It emerges that most of the errors are overestimation errors. In particular, the interval 0–500 contains most of the errors with the implicit Weibit that has about 43% of the errors in the interval [0–250) and the Logit that has about 44% of the errors in the interval [250–500). Note that the Logit and the implicit Weibit are the worst in flows underestimation. In this experiment, the worst model in flows overestimation is the Logit model.

TABLE 7. Bias frequencies (%).
Another graphical analysis (Figure 9) of the obtained results is performed using the Tukey mean-difference plot (also known as Bland–Altman plot), which provides a visual assessment of the shift between two different distributions of values (in this case, between the observed and simulated flows) (Cleveland, 1993). Referring to Figure 9, the y-axis reports the differences (bias) between the observed and simulated flows whereas the x-axis reports the means between such values. The continuous line represents the average value of the bias (Δ), whereas the two dashed lines are the boundaries of the confidence interval. By considering a significance of 95%, the lower limit (ll) and the upper limit (lu) are calculated as follows:
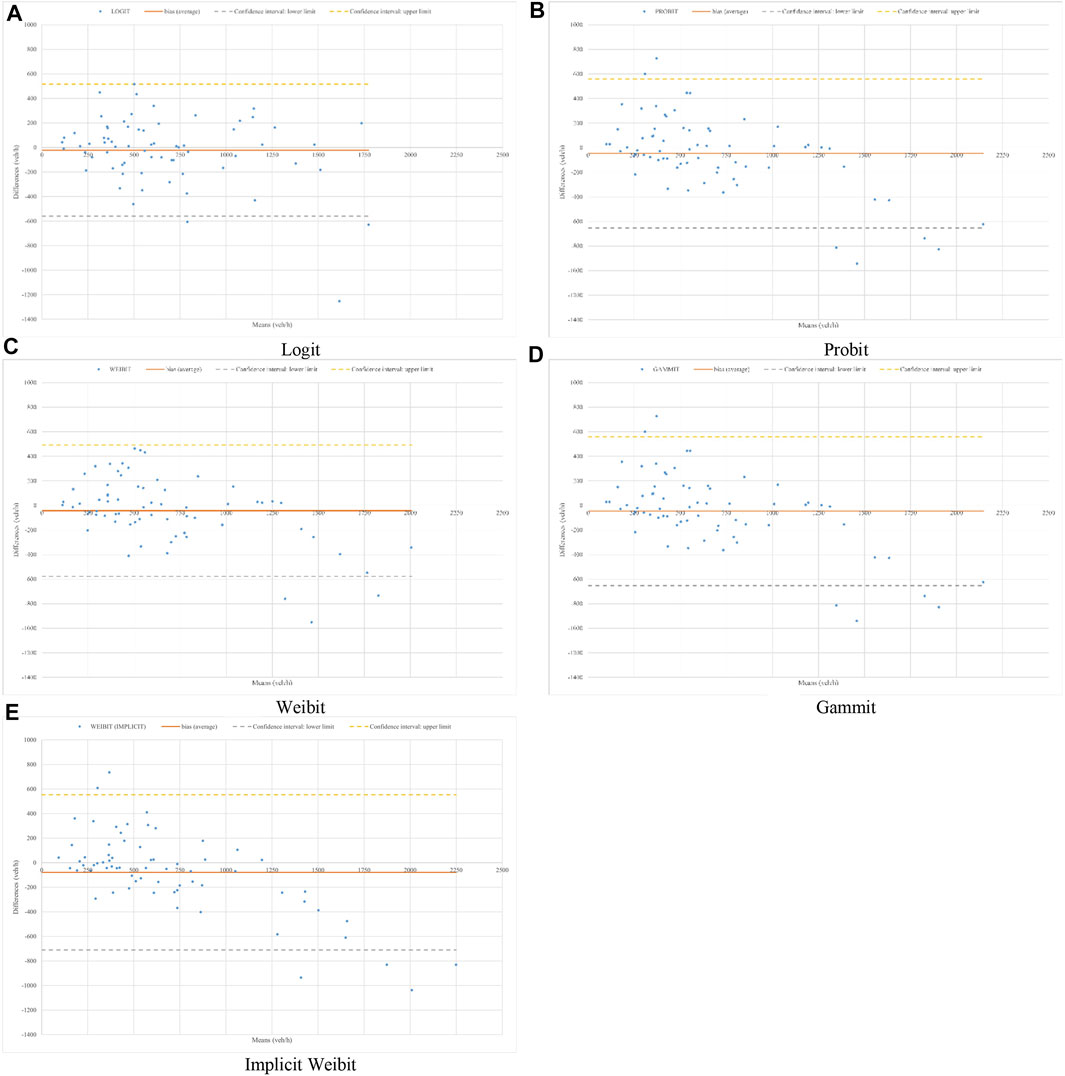
FIGURE 9. Comparison of link flows: Bland–Altman plot.
Considering the logit model (Figure 9A) emerges that the bias ranges from about −1,250 vehicles/h (underestimation) to about 515 vehicles/h (overestimation), although there are errors in under- and overestimation, as discussed above, most of the values fall within the confidence interval (three values are less than ll). The bias for Probit and Gammit models (Figures 9B,D) presents some points less than ll and some ones greater than lu. The weibit model (Figure 9C) suffers from some minor underestimation errors, but most points are within the confidence interval. The implicit weibit (Figure 9E) has values less than ll and other ones greater than lu.
The results obtained in terms of NRMSD for each MSA-FA experiment are reported in Table 8 for the considered path choice models, where Iter indicates the number of iteration of the MSA procedure and Time is the time in second needed to carry out the SUE procedure.

TABLE 8. Results for MSA-FA experiments on a real network of Salerno.
5 Conclusion and Future Developments
Some short comments can be made on the basis of the obtained results. In the Monte Carlo technique, the greater the variance is, the more is the number of samples to be carried out. Practically, a value of Nit = 100 gives acceptable results. Considering the weibit model, a value of parameter δ closer to one (confirming the estimate of the parameter ξj, suggested in Castillo et al. (2008)) provides values close to those obtained with models that consider covariance such as probit and gammit, especially in case of a very low variance of path costs. The results obtained with the probit and gammit models practically do not differ from each other considering both the test network and the real one. Considering the minimum path (but also other paths for which it is the same, as shown with regard to the test network in Figure 5), choice probabilities obtained with the weibit model are closer to those obtained with the probit/gammit models than to those obtained with the logit models. About the real network, the best results are obtained by considering the C-weibit model by taking a time that differs by two orders of magnitude from that taken with probit. It is clear that the analysis conducted cannot be considered exhaustive or definitive and that the results, although indicative, also depend on the considered application to reality. The main purpose of this work was to illustrate the hypotheses to be considered for a practical application of the considered models and to provide an example of the results that can be obtained by indicating also an order of magnitude of the bias that can be expected and of the necessary computing resources, in terms of time, considering a standard situation. A study involving other types of models, which is under development, consists of extending a similar analysis taking into account other Logit and Weibit derived models (i.e., path-size logit, C-Logit, mixed Logit, Logit–Probit, and Weibit–Gammit) and QUM. An extension to multitype vehicle assignment to consider autonomous vehicles is also under development.
Data Availability Statement
The original contributions presented in the study are included in the article. Further inquiries can be directed to the corresponding author.
Author Contributions
MDG and AP contributed to the conception and design of the study. MDG performed the statistical analysis and wrote the first draft of the manuscript. MDG and AP wrote sections of the manuscript. All authors contributed to manuscript revision, read, and approved the submitted version.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Acknowledgments
The authors wish to thank the reviewers for their suggestions, which were most useful in revising the article.
References
Antonisse, R. W., Daly, A. J., and Ben-Akiva, M. (1989). Highway Assignment Method Based on Behavioral Models of Car Drivers’ Route Choice. Transp. Res. Rec. 1220, 1–11.
Bell, M. G. H. (1995). Alternatives to Dial's Logit Assignment Algorithm. Transp. Res. Part B Methodol. 29, 287–295. doi:10.1016/0191-2615(95)00005-X
Ben-Akiva, M., and Bierlaire, M. (1999). “Discrete Choice Methods and Their Applications to Short Term Travel Decisions,” in Handbook of Transportation Science. International Series in Operations Research & Management Science. Editor R. W. Hall (Boston, MA: Springer US), 5–33. doi:10.1007/978-1-4615-5203-1_2
Ben-Akiva, M., and Lerman, S. R. (1985). “Discrete Choice Analysis: Theory and Application to Travel Demand,” in Transportation Studies (Cambridge, MA, USA: MIT Press).
Burrel, J. (1968). “Multiple Route Assignment and its Application to Capacity Restraint,” in Proceedings of the 4th International Symposium on the Theory of Road Traffic Flow (Karlsruhe, Germany: Leutzbach W, Baron P), 229–239.
Cantarella, G. E. (1997). A General Fixed-Point Approach to Multimode Multi-User Equilibrium Assignment with Elastic Demand. Transp. Sci. 31, 107–128. doi:10.1287/trsc.31.2.107
Cantarella, G. E., and Binetti, M. G. (2002). Stochastic Assignment with Gammit Path Choice Models. Transp. Plan. 64, 53–67. doi:10.1007/0-306-48220-7_4
Cantarella, G. E., and Fiori, C. (2022). Multi-vehicle Assignment with Elastic Vehicle Choice Behaviour: Fixed-point, Deterministic Process and Stochastic Process Models. Transp. Res. Part C Emerg. Technol. 134, 103429. doi:10.1016/j.trc.2021.103429
Cantarella, G. E., Watling, D. P., de Luca, S., and Di Pace, R. (2020). Dynamics and Stochasticity in Transportation Systems. Amsterdam, Netherlands: Elsevier.
Cascetta, E., Nuzzolo, A., Russo, F., and Vitetta, A. (1996). “A Modified Logit Route Choice Model Overcoming Path Overlapping Problems. Specification and Some Calibration Results for Interurban Networks,” in Proceedings of the Thirteenth International Symposium on Transportation and Traffic Theory (Lyon, France: Lesort, J.B.), 697–711.
Cascetta, E. (2009). “Transportation Systems Analysis,” in Springer Optimization and its Applications. 2 edn (Boston, MA: Springer US). doi:10.1007/978-0-387-75857-2
Castillo, E., Menéndez, J. M., Jiménez, P., and Rivas, A. (2008). Closed Form Expressions for Choice Probabilities in the Weibull Case. Transp. Res. Part B Methodol. 42, 373–380. doi:10.1016/j.trb.2007.08.002
Comi, A., and Polimeni, A. (2022). Estimating Path Choice Models through Floating Car Data. Forecasting 4 (2), 525–537. doi:10.3390/forecast4020029
Daganzo, C. F., and Sheffi, Y. (1977). On Stochastic Models of Traffic Assignment. Transp. Sci. 11, 253–274. doi:10.1287/trsc.11.3.253
Daganzo, C. F. (1983). Stochastic Network Equilibrium with Multiple Vehicle Types and Asymmetric, Indefinite Link Cost Jacobians. Transp. Sci. 17, 282–300. doi:10.1287/trsc.17.3.282
de la Barra, T., Perez, B., and Anez, J. (1993). “Multidimensional Path Search and Assignment,” in PTRC Summer Annual Meeting, 21st, 1993 (Manchester, England: University of Manchester), Vol. P 366, 307–320.
De Maio, M. L., and Vitetta, A. (2015). Route Choice on Road Transport System: A Fuzzy Approach. Ifs 28, 2015–2027. doi:10.3233/IFS-141375
Di Gangi, M., and Vitetta, A. (2018). “Specification and Aggregate Calibration of a Quantum Route Choice Model from Traffic Counts,” in New Trends in Emerging Complex Real Life Problems: ODS, Taormina, Italy, September 10–13, 2018. AIRO Springer Series. Editors P. Daniele, and L. Scrimali (Cham: Springer International Publishing), 227–235. doi:10.1007/978-3-030-00473-6_25
Di Gangi, M., Polimeni, A., and Belcore, O. M. (forthcoming). C-Weibit Discrete Choice Model: A Path Based Approach. International Conference on Optimization and Decision Science (ODS2022), Firenze (Italy), August 30-September 2, 2022. Springer.
Dial, R. B. (1971). A Probabilistic Multipath Traffic Assignment Model Which Obviates Path Enumeration. Transp. Res. 5, 83–111. doi:10.1016/0041-1647(71)90012-8
Domencich, T. A., and McFadden, D. (1975). Urban Travel Demand: A Behavioral Analysis. Amsterdam: North-Holland Publishing. Number: Monograph.
Fosgerau, M., Frejinger, E., and Karlstrom, A. (2013). A Link Based Network Route Choice Model with Unrestricted Choice Set. Transp. Res. Part B Methodol. 56, 70–80. doi:10.1016/j.trb.2013.07.012
Mai, T., Fosgerau, M., and Frejinger, E. (2015). A Nested Recursive Logit Model for Route Choice Analysis. Transp. Res. Part B Methodol. 75, 100–112. doi:10.1016/j.trb.2015.03.015
Manski, C. F., and McFadden, D. (1981). Structural Analysis of Discrete Data with Econometric Applications. Cambridge: The MIT Press.
McFadden, D. (1978). “Modeling the Choice of Residential Location,” in Spatial Interaction Theory and Residential Location. Editors A. Karlqvist, L. Lundqvist, and J. W. Weibull (Amsterdam: North-Holland), 72–77.
Nuzzolo, A., and Comi, A. (2018). A Subjective Optimal Strategy for Transit Simulation Models. J. Adv. Transp. 2018, 1–10. doi:10.1155/2018/8797328
Nuzzolo, A., and Comi, A. (2016). Individual Utility‐based Path Suggestions in Transit Trip Planners. IET Intell. Transp. Syst. 10, 219–226. doi:10.1049/iet-its.2015.0138
Prashker, J. N., and Bekhor, S. (2004). Route Choice Models Used in the Stochastic User Equilibrium Problem: A Review. Transp. Rev. 24, 437–463. doi:10.1080/0144164042000181707
Prato, C. G. (2009). Route Choice Modeling: Past, Present and Future Research Directions. J. Choice Model. 2, 65–100. doi:10.1016/S1755-5345(13)70005-8
Quattrone, A., and Vitetta, A. (2011). Random and Fuzzy Utility Models for Road Route Choice. Transp. Res. Part E Logist. Transp. Rev. 47, 1126–1139. doi:10.1016/j.tre.2011.04.007
Rosa, A., and Maher, M. (2002). “Algorithms for Solving the Probit Path-Based Stochastic User Equilibrium Traffic Assignment Problem with One or More User Classes,” in Transportation and Traffic Theory in the 21st Century. Editor M. A. P. Taylor (Bingley, UK: Emerald Group Publishing Limited), 371–392. doi:10.1108/9780585474601-019
Russo, F., and Vitetta, A. (2003). An Assignment Model with Modified Logit, Which Obviates Enumeration and Overlapping Problems. Transportation 30, 177–201. doi:10.1023/A:1022598404823
Sheffi, Y., and Powell, W. B. (1982). An Algorithm for the Equilibrium Assignment Problem with Random Link Times. Networks 12, 191–207. doi:10.1002/net.3230120209
Sheffi, Y. (1985). Urban Transportation Networks: Equilibrium Analysis with Mathematical Programming Methods. Englewood Cliffs, N.J: Prentice-Hall.
Si, B.-F., Zhong, M., Zhang, H.-Z., and Jin, W.-L. (2010). An Improved Dial's Algorithm for Logit-Based Traffic Assignment within a Directed Acyclic Network. Transp. Plan. Technol. 33, 123–137. doi:10.1080/03081061003643705
Vitetta, A. (2016). A Quantum Utility Model for Route Choice in Transport Systems. Travel Behav. Soc. 3, 29–37. doi:10.1016/j.tbs.2015.07.003
Wang, J., Peeta, S., and He, X. (2019). Multiclass Traffic Assignment Model for Mixed Traffic Flow of Human-Driven Vehicles and Connected and Autonomous Vehicles. Transp. Res. Part B Methodol. 126, 139–168. doi:10.1016/j.trb.2019.05.022
Keywords: path choice behavior, discrete choice models, RUM, SUE, Logit, Weibit, Probit, Gammit
Citation: Di Gangi M and Polimeni A (2022) Path Choice Models in Stochastic Assignment: Implementation and Comparative Analysis. Front. Future Transp. 3:885967. doi: 10.3389/ffutr.2022.885967
Received: 28 February 2022; Accepted: 01 June 2022;
Published: 15 July 2022.
Edited by:
Ghim Ping Ong, National University of Singapore, SingaporeReviewed by:
Hooi Ling Khoo, Universiti Tunku Abdul Rahman, MalaysiaDe Zhao, Southeast University, China
Copyright © 2022 Di Gangi and Polimeni. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Massimo Di Gangi, bWRpZ2FuZ2lAdW5pbWUuaXQ=