 Lu Bai1
Lu Bai1 Hongmin Li
Hongmin Li- 1Department of Mathematics, University of Macau, Macau, China
- 2College of Economics and Management, Northeast Forestry University, Harbin, China
- 3Collaborative Innovation Center for Chongqing’s Modern Trade Logistics and Supply Chain, Chongqing Technology and Business University, Chongqing, China
- 4School of Information Science and Engineering, Lanzhou University, Lanzhou, China
Air pollution forecasting plays a pivotal role in environmental governance, so a large number of scholars have devoted themselves to the study of air pollution forecasting models. Although numerous studies have focused on this field, they failed to consider fully the linear feature, non-linear feature, and fuzzy features contained in the original series. To fill this gap, a new combined system is built to consider features in the original series and accurately forecast PM2.5 concentration, which incorporates an efficient data decomposition strategy to extract the primary features of the PM2.5 concentration series and remove the noise component, and five forecasting models selected from three types of models to obtain the preliminary forecasting results, and a multi-objective optimization algorithm to combine the prediction results to produce the final prediction values. Empirical studies results indicated that in terms of RMSE the developed combined system achieves 0.652 6%, 0.810 1%, and 0.775 0% in three study cities, respectively. Compared to other prediction models, the RMSE improved by 60% on average in the study cities.
1 Introduction
Atmosphere pollutants can cause a variety of diseases (Organization, 2014, March 25; Glencross et al., 2020), and cause other environmental problems (Grennfelt et al., 2020; Manisalidis et al., 2020), endangering human survival. To alleviate the impacts of atmosphere pollution, support environmental management, more scholars are focusing on air pollution forecasting.
Air pollution forecasting is a complex task since there are multiple influences on pollutant concentrations, such as weather, wind speed and direction, geographic location, pollution emission and absorption, and policies, etc. Therefore, the concentration series are chaotic and usually contain both linear and non-linear features (Niska et al., 2004). In the past decades, the forecasting of air pollution has attracted wide academic interest, and much effort has been made to forecast concentration using various approaches. Generally speaking, these approaches can be divided into four categories: individual models, hybrid models, combined models, and meteorological models. The meteorological models are based on the physical and chemical processes of pollutants in the atmosphere. This type of model is the subject of atmospheric research. For individual methods, the concentration series are modeled and forecast by one type of model, such as the traditional statistical model, Auto-Regressive Integrated Moving-Average (ARima), neuron network model, Back-propagation Neural Network (BPnn), etc. Research on this type of model was mainly concentrated before 2010. Such as Niska et al. (2004) used a parallel genetic algorithm to select the inputs for the multi-layer perceptron model to forecast hourly concentrations of nitrogen dioxide. Goyal et al. (2006) compared the performance of three statistical models for forecasting the concentration of respirable suspended particulate matter. These three models are multiple linear regression, ARima, and the combination of ARima and Multiple linear regression. The prediction results show that the combination of ARima and Multiple linear regression performs better. Kurt et al. (2008) built an online forecasting system by utilizing BPnn to predict the concentrations of SO2, PM10 and CO.
With the development of forecasting methods, a new type of forecasting method, the hybrid model, has been proposed and widely used. The hybrid models can advance forecasting by combining different forecasting techniques, such as combining statistical models and machine learning methods. This combination can compensate for the limitations of individual methods by taking advantage of different methods. Zhu et al. (2017) decomposed the original data into several intrinsic mode functions (IMFs, containing the important information) and noise series. Then, they built two hybrid forecasting models to forecast the daily air quality index, including least square support vector regression, Holt-Winters additive model, Grey model, and seasonal ARima. By combining the Hampel identifier, empirical wavelet transform, Elman neural network, and Outlier-robust extreme learning machine, a novel hybrid algorithm was proposed in (Liu et al., 2019), which improved the forecasting accuracy of fine particle concentrations. Similarly, using a data preprocessing module and an optimal forecasting module, Wang et al. (2020a) proposed a new well-performing hybrid model to forecast daily air quality, which combines Hampel identifier, Variational mode decomposition, Sine cosine algorithm, and Extreme learning machine to forecast daily air quality.
With the development of different forecasting techniques, combined forecasting has gradually become the research focus of scholars. The main idea of the combined models is to combine the forecasting results of several individual models. Yang et al. (2020) proposed a combined forecasting system combining Complementary ensemble empirical mode decomposition (CEEMD), BPnn, Extreme learning machine, and Double Exponential Smoothing, then used fuzzy theory and Cuckoo search algorithm to determine aggregation weights to obtain final results. Based on the wavelet transform and neural networks, Liu et al. (2021) constructed a new combined model. In their study, discrete Wavelet transform was used to decompose the NO2 concentration series. Next to the Long short-term memory neural network (LSTM), Gated recurrent units and Bi-directional LSTM were utilized to forecast NO2 concentration. Finally, they applied two numerical weighting methods combining the three single forecasting results.
However, these forecasting models have various problems. Because of their simple structure and convenient calculation, statistical models have been widely used, but the linear mapping and poor extrapolation limit the forecasting performance of such models (Wang et al., 2020c). Artificial intelligence methods are widely used own to their strong learning ability and ability to handle nonlinear features, but such methods tend to fall into local optima and overfitting. Moreover, their performance is dependent on artificially set hyperparameters (Niu and Wang, 2019). To avoid the defects of the individual models, several hybrid models have been developed. However, hybrid models still do not always perform best using only one single predictor, since the single model cannot capture various features contained in the series (Yang et al., 2020). Therefore, the combination models gradually developed. However, previous combined models usually combine a certain type of model. This combination can only continuously extract one type of feature in the series, and still cannot analyze the multiple features contained in the series. This paper summarizes the above-mentioned types of models in Table 1. To fill this gap, a novel combined model containing a data decomposition module, a forecasting module consisting of different types of forecasting models, and a combination module weighted by multi-objective optimization algorithms is proposed in this paper. More specifically, the complete ensemble empirical mode decomposition with adaptive noise (cEEMDan) strategy is used for data decomposition to reduce the influence of the noise in the original series. Whereafter, five predictors from three types of models are introduced to construct the forecasting module. These five predictors are one statistical model, three neuron networks, and a hesitant fuzzy forecasting model. The multi-optimization algorithm is utilized to aggregate the forecasting results of five individual models to obtain the final forecasting results.
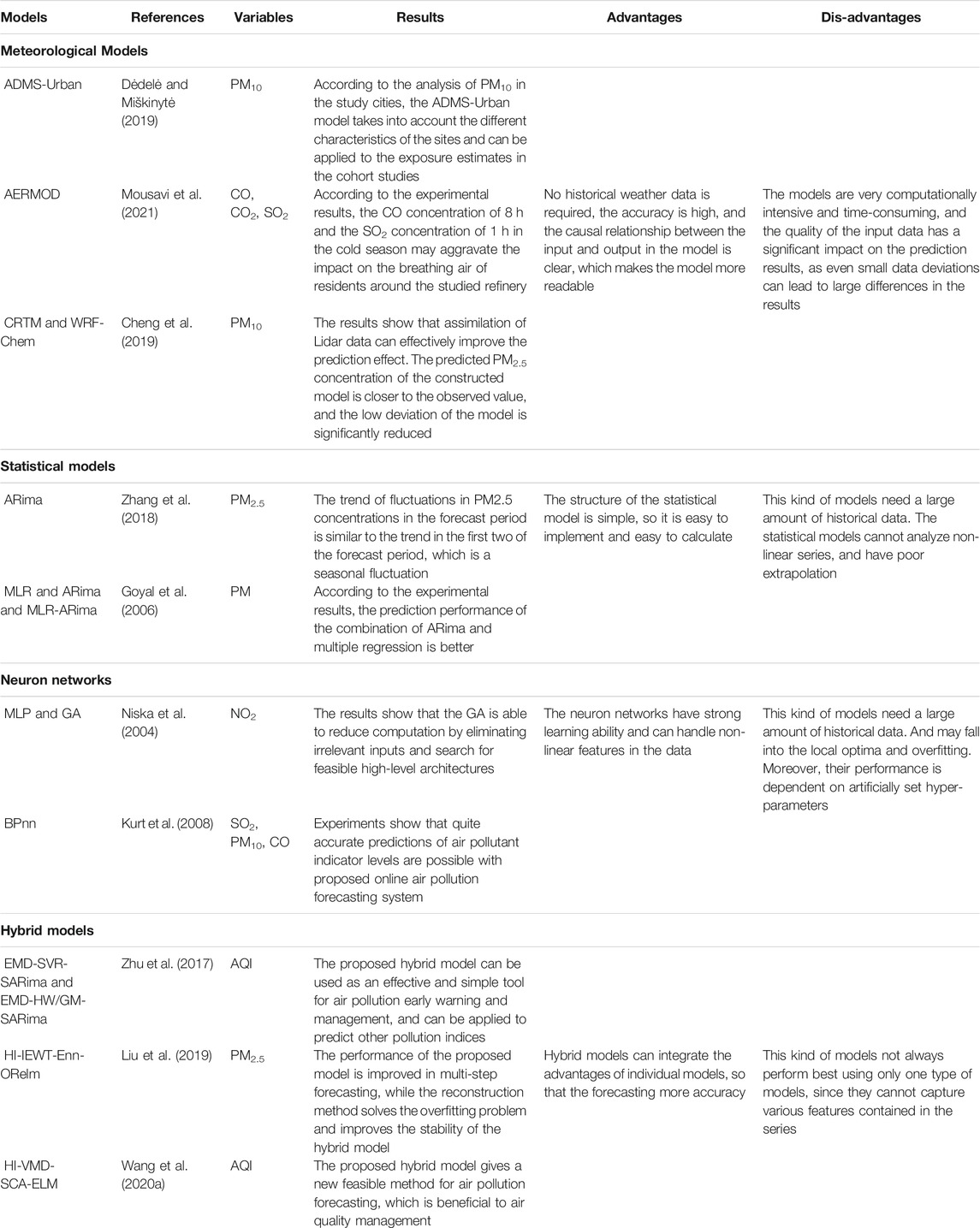
TABLE 1. Summary of the different types of models.
Based on the above content, the main contributions and innovations of this research are summarized as follows:
1) A novel combined forecasting system is proposed by combining with data decomposition strategy, forecasting models, and multi-objective optimization algorithm. To obtain better forecasting performance, the strategy of “decomposition and ensemble” is introduced to capture different features and remove the noise of the original data, five individual models are used to forecast the decomposed data, and a multi-objective optimization algorithm is utilized to obtain the optimal weights of individual models and integrate them. The empirical experiments demonstrated that the proposed combined forecasting system can provide accurate prediction results for PM2.5 concentration forecasting, and can provide data support for decision-making.
2) Three types of forecasting models are introduced to establish the robust forecasting module. In order to fully analyze the various features contained in the series, three types of forecasting models are combined. Since there are multiple influences on air pollution, the pollutant concentration series are chaotic and usually contain linear and non-linear features. The utilized three different types of models can analyze different features in the series, the statistical model can deal with linear features, neuron networks can cope with non-linear features, and the hesitant fuzzy forecasting model is used to analyze the fuzzy features. This ensures the diversity of the system and avoids that the combined model focuses on a certain type of specific model while ignoring other features in the series.
3) A multi-objective optimization algorithm is used to weight the individual forecasting models. In this study, the final forecasting results are equal to the weighted sum of individual model forecasting results, so the weight of each model is a key to ensuring forecasting accuracy. Most previous studies used numerical weighting methods, so this paper compares several numerical weighting methods with optimization algorithms. In addition, the idea of some feature selection methods can also be regarded as a kind of weighting, so this paper also chooses two feature selection methods, Max-Relevance and Min-Redundancy (MRMR) and ReliefF, as weighting methods to participate in the comparison of weighting methods. However, after the comparison in this study, the multi-objective optimization algorithm is proven to be the best weighting method, outperforming not only numerical methods but also feature selection methods.
For the convenience of the readers, all abbreviation words are listed in Table 2. The remainder of this paper is organized as follows: the basic methodology of utilized methods and the system design is introduced in Section 2. The experimental design, the experiment results, and the analysis of the results are presented in Section 3. The significance test and stability test are discussed in Section 4. Finally, Section 5 provides the conclusion of this study.
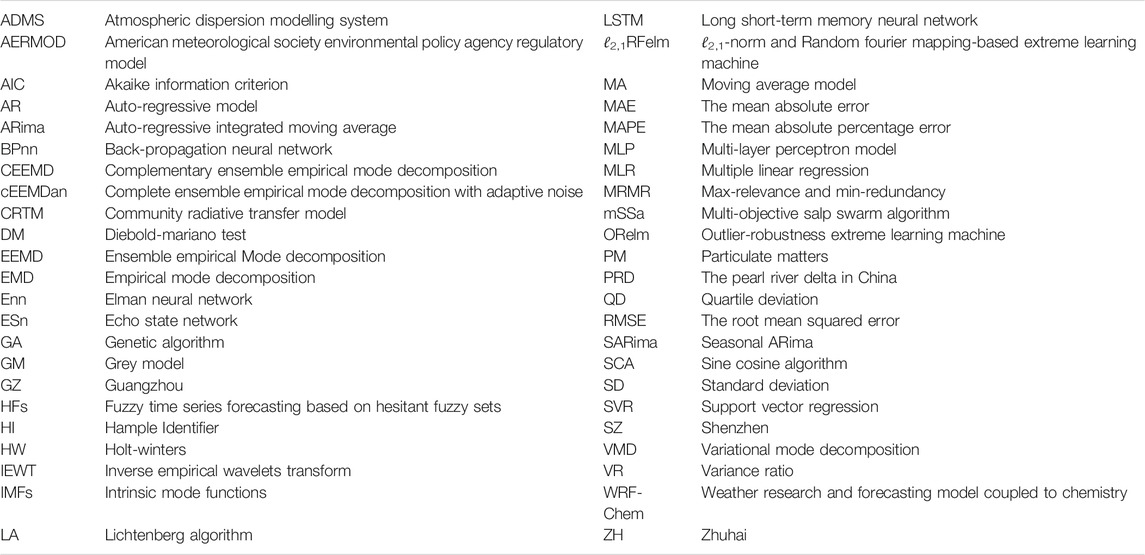
TABLE 2. List of nomenclature.
2 Framework of the Developed Combined Forecasting System
In this section, the utilized methodologies of the combined system are introduced. These methodologies include the cEEMDan, ARima, BPnn, ℓ2,1-norm and Random Fourier Mapping-Based Extreme Learning Machine (ℓ2,1RFelm), Echo state network (ESn), Fuzzy time series forecasting based on hesitant fuzzy sets (HFs) and Multi-objective salp swarm algorithm (mSSa).
2.1 Data Decomposition
Due to various factors, the monitoring data, especially the air pollutant concentration data, will have fluctuations and noise, which will affect the further analysis of the data. Therefore, to extract the characteristics of the series, cEEMDan is used to decompose the original series.
cEEMDan is an improved method based on the Empirical Mode Decomposition (EMD) method, which adds adaptive noise series at each stage of the EMD decomposition to make the decomposition more perfect while avoiding mode mixing problem (Torres et al., 2011). EMD-series methods can decompose any complicated series into a finite of intrinsic mode functions (IMFs), and each IMF represents the implicit characteristics of the original series.
The decomposition results of EMD are some IMFs and residuals, and the decomposition process is the process of finding the IMFs. Assume the original PM2.5 concentration series X (t), t = 1, … , n is decomposed into k IMFs, the EMD process can be summarized as follows:
Let a0(t) = X(t) be the signal being analyzed, find all the local maximum and minimum of a0, and interpolate to form upper and lower envelopes, denoted as
Since the EMD method is subject to mode mixing, the ensemble EMD (EEMD) method is proposed to alleviate this problem by adding white noise to the original signal. However, EEMD with high computational cost and the number of decomposed IMFs varies with the added noise. To overcome the aforementioned problem, an improved EEMD method is proposed (Wang et al., 2020b). Let wi, i = 1, … , I be white noise with standard deviation ɛj. Based on the EMD, the process of cEEMDan can be described as following. Add white noise into the original signal, then the signals being analyzed are
2.2 Individual Forecasting Methods
In this study, three different types of methods are utilized to predict the concentration of PM2.5. More details are introduced in the following subsections.
2.2.1 Conventional Statistical Method
This kind of method is based on statistics, with the advantages of low complexity and fast computational speed, and has a strong model interpretation. One of the most popular and important models is the Auto-regressive Integrated Moving Average (ARima), which has been widely used in time series forecasting (Pai and Lin, 2005; Ariyo et al., 2014; Benvenuto et al., 2020).
For the ARima model, future values are considered as a linear combination of past values and errors, and the mathematical form of the model for predicting is expressed as follows (Pai and Lin, 2005):
cwhere X(t), …, X (t−p) are actual values, ϒt, … ,ϒt−q are random errors,
2.2.2 Fuzzy Computation and Forecasting
The fuzzy time series forecasting method was first proposed by Song et al. (Song and Chissom, 1993) based on the fuzzy set theory (Zadeh, 1996). It has been continuously developed in recent decades and has been widely applied for forecasting in many fields (Singh, 2007; Cheng et al., 2016; Wang et al., 2021a). As an extension of the fuzzy sets, Torra et al. introduced the concept of hesitant fuzzy sets in 2009 (Torra and Narukawa, 2009). The specific operation steps of HFs are described as follows (Bisht and Kumar, 2016; Cheng et al., 2016; Wang et al., 2021a).
Define the universe of discourse as U = (Xmin−σ, Xmax + σ). Here Xmin and Xmax are the minimum and maximum of the training set, σ is the standard deviation of X. Next, using equal and unequal intervals, and triangular membership function to fuzzify the universe of discourse. The length of equal intervals is determined by the distance between the maximum and minimum values in the time series, and the length of unequal intervals is determined by using the cumulative probability distribution approach (Lu et al., 2015; Bisht and Kumar, 2016). Suppose it is divided into J intervals, each interval defined by three parameters,
After this step, the membership degrees of xi to equal intervals and the unequal intervals can be obtained, denoted as mde and mdu, respectively. Then, compute the weights of equal intervals and unequal intervals using the following formula (Bisht and Kumar, 2016),
where dej and duj are the lengths of j-th equal and unequal intervals,
where
Following example introduces the specific aggregation process for aggregation:
Let X = {x1, x2, x3} be a reference set.
Therefore, the fuzzy set
After determining the membership of every element, establish fuzzy logical relationships and fuzzy logical relationship groups. The fuzzy logical relationships are established by the rule: If Ai and Ai+1 are the fuzzy values at time t and t + 1 respectively, the fuzzy logical relation is denoted as Ai → Ai+1. Here, Ai is called the current state and Ai+1 is the next state. Then, the same left-hand side of the fuzzy logical relationships is classified to form several fuzzy logical relationship groups. The main idea of forecasting is to infer the next state based on the current state. Based on the fuzzy logical relationship groups, a matrix Pm×m can be generated, each element in P represents the frequency of Ai → Ai+1 that with the same fuzzy logical relationship. According to the max-min composition operations on fuzzy logical relationship, the fuzzy output can be obtained and defuzzify by
where Me and Mu is the mid points of the equal and unequal intervals. As the introduction above, the computational complexity of HFs is
Summarizing all this activity, Table 3 is given to show the implementation of the HFs.
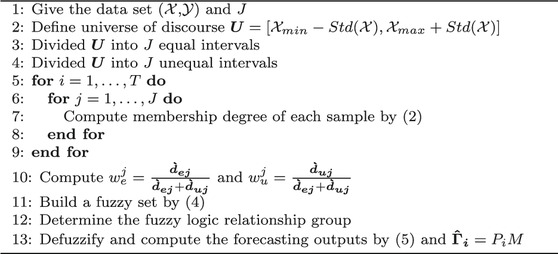
TABLE 3. The process of the HFs.
2.2.3 Machine Learning Technique
The methods based on machine learning have strong learning ability and can handle the non-linear components in the time series, so they have been widely used in some fields (Gündüz et al., 2019; Henrique et al., 2019; Volk et al., 2020; Wang et al., 2021b). In this study, three different networks were selected to analyze the series, since the features of the series are uncertain.
Back-propagation neural network (BPnn) is a three-layer feed-forward network with an input layer, a hidden layer, and an output layer. Each layer takes inputs only from the previous layer and sends the outputs only to the next layer. Define the input vector as
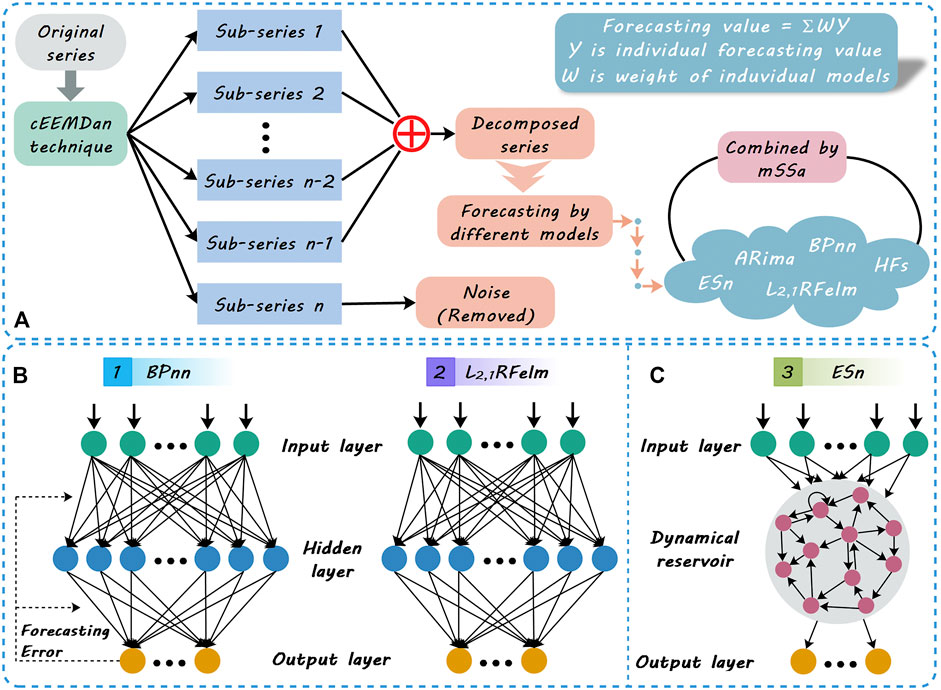
FIGURE 1. (A) is the flowchart of the proposed combined system; (B) and (C) are the structures of the neural networks used in this paper, where BPnn and ℓ2,1RFelm have the same structure and different solution processes.
Calculate outputs of all neurons in hidden layer (Hecht-Nielsen, 1992; Wang Y. et al., 2021):
Where,
ℓ2,1RFelm is an improved feed-forward neural network with a single hidden layer, which was proposed by Zhou et al. (2016). In this method, Random Fourier Mapping is used to improve the extendibility of the network by approximating the activation function in ELM. And ℓ2,1-norm is used to make the hidden layer more compact and discriminative by cutting irrelevant neurons.
To predict the PM2.5 concentration of the day, the PM2.5 concentrations of the past 4 days are used. So, the original concentration series X = {x1, x2, … , xT} is reconstructed as follows:
Then, the main processes of this method can be introduced as follows:
Randomly initialize the connection weights
here wH1 represents the weight between the first input neuron and H-th hidden neuron, bh represents the bias of h-th hidden neuron. Then the output matrix of the hidden layer is
In this method, the Random Fourier Mapping g (⋅) is used to approximate the kernel function, so
Then, calculate the output of the network and solve parameter. Let the connection weight between the hidden layer and the output layer is
chere ɛ represents the training error,
Echo state network (ESn) is an improved recurrent neural network and was proposed in 2004 (Jaeger and Haas, 2004). Without output feedback connections, an ESn consists of an input layer with I neurons, L internal neurons possessing internal states, and one output neuron. The structure of ESn is shown in Figure 1C. Given a training set
2.3 Optimization of Combination Weights
Mirjalili et al. proposed a novel swarm intelligence optimization algorithm in 2017, which was inspired by the behavior of salps looking for food (Mirjalili et al., 2017a). Their study has shown that this method can approximate the Pareto optimal solution with high convergence and coverage. It has merits among the current optimization algorithms and is worth applying to different problems (Mirjalili et al., 2017a). Therefore, this method (mSSa) is used to find the optimal combined weight of different forecasting models in this study. More details are introduced as follows.
2.3.1 Multi-Objective Optimization
Multi-objective optimization is concerned with mathematical optimization problems involving more than one objective function to be optimized simultaneously (Haimes et al., 2011). The multi-objective optimization problem can represent as follows:
where
The purpose of multi-objective optimization is to find the set of acceptable solutions (Ngatchou et al., 2005). Hence, the definitions related to the Pareto-optimal solutions are introduced.
Definition 1. Pareto domination Given two vectors
Definition 2. Pareto optimal set A set including all the non-dominated solutions is called Pareto optimal set. The mathematical description is
2.3.2 Process of Multi-Objective Salp Swarm Algorithm
The individuals in a salp chain are divided into two groups: the front of the chain is the leader, the others are followers. Assume O indicates the dimension of search space, N denotes the number of salp chains, then the location of all the salps can be defined as a matrix:
here t represents t-th iteration. The position of each salp is a candidate solution. Next, calculate fitness of each salp chain
where
In Eq. 14, τ1 is a parameter that controls the balance of exploration and exploitation, τ2 is a random number in (0, 1) that determines the distance to move, and τ3 is also a random number in (0, 1) that determines the direction of movement. The coefficient τ1 is defined as
If the archive is not full, the non-dominated solutions are saved to the archive after comparison according to Definition 1, otherwise, before storage deletes some solutions (Mirjalili et al., 2017a). According to the principle of improving the distributivity of solutions in the archive, use the Roulette Wheel mechanism to remove the densest solutions. The probability of the solution being removed can be calculated as Pr = Nl/c, where Nl is the number of l-th solution in the archive, and c is a constant greater than 1 (Mirjalili et al., 2017b).
According to the introduction of mSSa, the computational complexity of this method is
2.4 The Proposed Combined Forecasting System
Using the aforementioned methods and strategy, a novel combined pollutant concentration forecasting system based on the data decomposition strategy, several individual forecasting models, and a multi-objective optimization algorithm is designed.
Assume there are M models to predict the pollutant concentration, the forecasting results are denoted as
here F is the final forecasting result.
The main steps of this proposed system are listed as follows, and the flowchart of this study is described in Figure 1.
Pre-processing of original data. Since the original series are fluctuating, it is difficult to analyze its features. Therefore, the strategy of “decomposition and ensemble” is utilized to distinguish different characteristics and noise in the original series. And then, the noise is filtered out to reconstruct a more stable series. The parameters of this method are shown in Table 5.
Forecasting by individual models. Since the features hidden in the series are not certain, three types of methods were used to analyze the series and implement forecasting. These methods contain a traditional statistical model (ARima), a hesitant fuzzy time series forecasting model, and machine learning models (BPnn, ℓ2,1RFelm, ESn). In the three machine learning models, BPnn and ℓ2,1RFelm have the same network structure but different solving strategies, BPnn and ESn have different network structures but the same solving strategy, and ℓ2,1RFelm and ESn have different network structures and solving strategies.
Construction of the combined system. In order to obtain more accurate forecasting results, use mSSa to conduce the optimal combined weights of the individual models. More specifically, take the predicted values obtained by each individual model as input and the true concentration values as output to form a training set. Then, the optimization algorithm is trained based on this set and finally obtains the optimal weight vector. Afterward, the forecasting results of such individual models are combined together by using optimal weight to obtain the final forecasting value.
3 Empirical Analysis
In this study, the concentration of PM2.5 is forecast by the proposed combined system. This section mainly introduces the experimental process and analyzes the forecasting results.
3.1 Data Description
Three PM2.5 concentration data sets collected from the Pearl River Delta (PRD) region in China are selected as illustrative examples to verify the effectiveness of the proposed combined prediction system, including Guangzhou (GZ), Shenzhen (SZ), and Zhuhai (ZH). There are few missing data in these series, and the moving median method with a window length of 10 is used to fill in the missing data. Some statistical indicators for these three data sets are presented in Table 4. Considering the availability of data, the hourly concentrations were collected from 2020.04.29 to 2020.09.25, and these data were divided twice. In the forecasting module, the original data sets were divided into training sets and test sets, and the train to test ratio of each study city is Tr1:Te1 = 7 : 3. And in the combination module, Te1 was divided into training set Tr2 and test set Te2, the division ratio is 7:3.
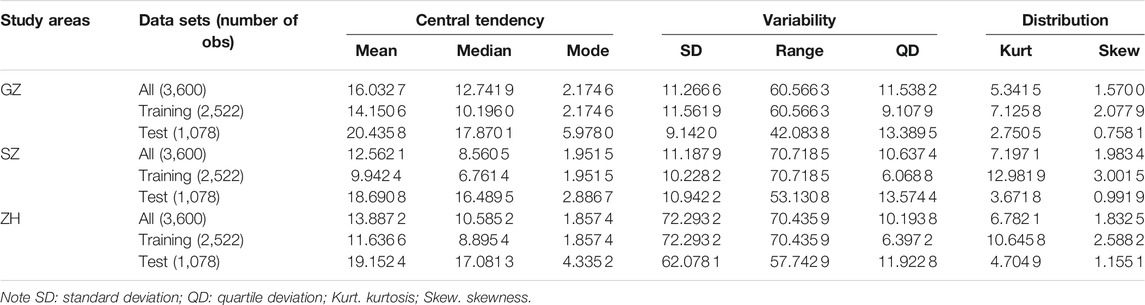
TABLE 4. Descriptive statistics of data sets.
3.2 Evaluation Metrics
In previous studies, numerous metrics have been utilized to evaluate model performance. To scientifically assess the proposed system, three metrics are selected as evaluation criteria, including two scale-dependent indicators and a percentage indicator. Details are as follows.
3.2.1 Scale-dependent Indicators
The unit of this type of indicator is the same as the unit of original data, so it can not be used to compare two series with different units. Two commonly used scale-dependent measures are Mean absolute error and Root mean squared error, they are based on absolute errors and squared errors, respectively (Hyndman and Athanasopoulos, 2018).
The mean absolute error (MAE) is a commonly used indicator to evaluate the deviation between forecast values and true values (Khair et al., 2017):
where N is the sample size, An represents the actual value of n-th sample, and Fn indicates the n-th forecast value. This metric can avoid the cancellation of the positive and negative predicted errors. The lower the value of MAE, the better the model is. MAE = 0 indicates that there is no error in the forecasting.
The root mean squared error (RMSE) is a commonly used measure of the forecasting results of machine learning models. Its equation is shown in (Eq. 17) (Wang Y. et al., 2021)
Same to the MAE, the lower the value of RMSE, the better the prediction. But RMSE is more sensitive to extreme values. Therefore, if the difference between RMSE and MAE is large, the greater the possibility of large errors existing in forecasting.
3.2.2 Percentage Indicator
The frequently used percentage indicator is the mean absolute percentage error (MAPE). It is often used in practice since it is a very intuitive explanation in terms of relative error and is unit-free. Its equation is shown as follows (Khair et al., 2017):
Compared to MAE, this indicator is normalized by actual value, and useful when the size or size of a prediction variable is significant in evaluating the accuracy of forecasting (Khair et al., 2017). However, when there is 0 in the actual value, this indicator can not be used. MAPE = 0% indicates a perfect model, while MAPE = 100% indicates a poor model.
3.3 Parameter Settings
Different parameters of the model will lead to different results, so the analysis of the predicted results should be based on the parameters used. The model parameters used in this paper are shown in Table 5. For ARima, the optimal lag order, the optimal degree of difference, and the optimal order of the moving average are determined based on the Akaike Information Criterion (AIC). And all the empirical experiments are implemented on MATLAB R2020a, run on the Windows 10 professional operating system.
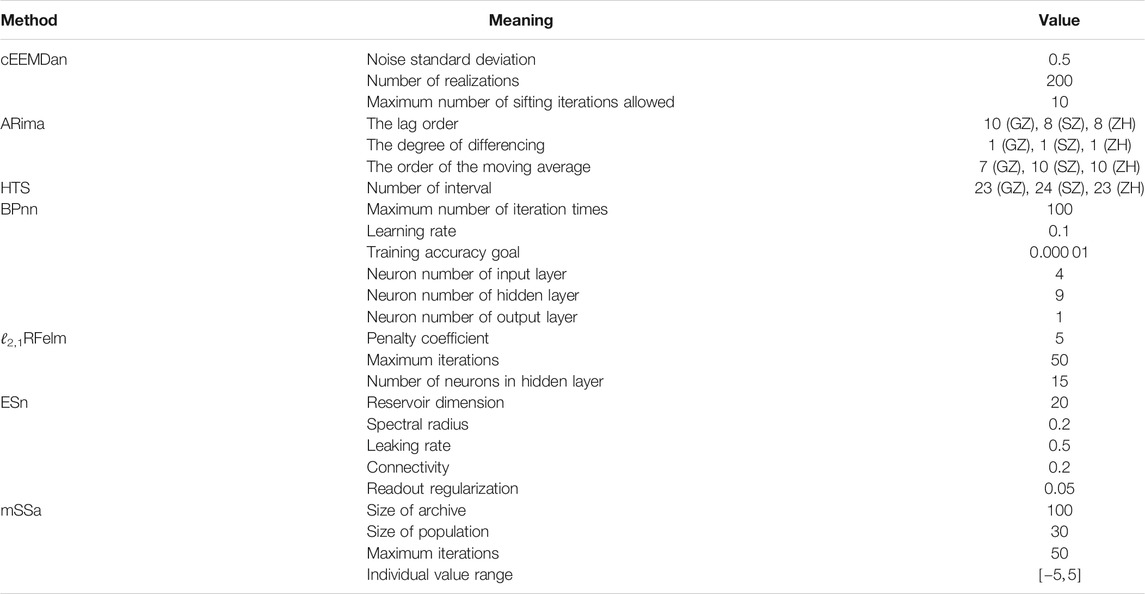
TABLE 5. Experimental parameter settings of different individual models.
3.4 Experiments and Results Analysis
In this study, three comparisons are implemented based on the data from GZ, SZ, and ZH in China. The first comparison is implemented to verify the effectiveness of the data decomposition strategy, the second comparison compares the different combination methods, and the last comparison compares the individual forecasting methods with the combined forecasting system. The forecasting performance lists in Table 6 and the specific results are analyzed as follows.
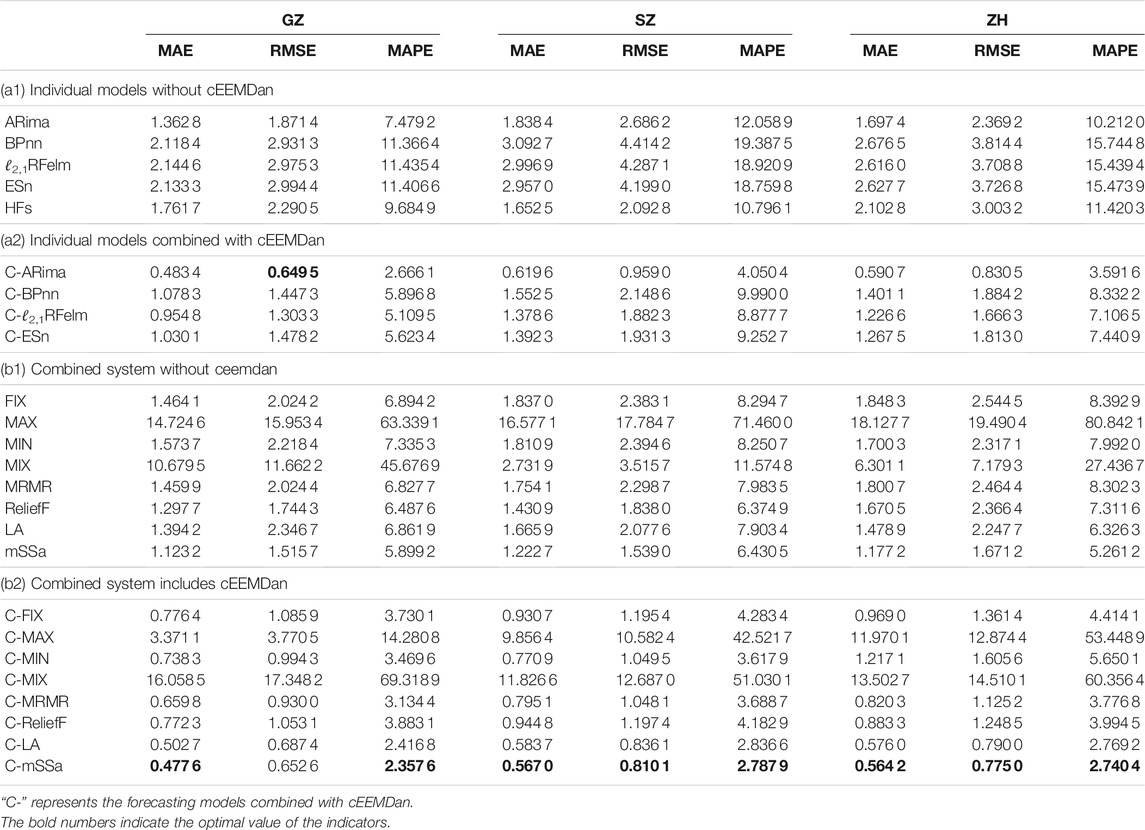
TABLE 6. Forecasting results of individual models and combined systems based on the original data and decomposed data.
3.4.1 Comparison I
This comparison is set to compare the forecasting accuracy between the models combining the cEEMDan and models without combining cEEMDan. The comparisons are divided into two categories, one for individual models and one for the combined system. The first category contains comparisons of ARiam vs. C-ARima, BPnn vs. C-BPnn, ℓ2,1RFelm vs. C-ℓ2,1RFelm, and ESn vs. C-ESn. Here, the hesitant fuzzy time series forecasting method has fuzzed the original series and constructed a transition matrix based on the fuzzy logic relationship group to forecast pollution concentration. These operations have compressed and filtered the information of the original series, so the hesitant fuzzy time series forecasting experiment based on the composed data is no longer carried out. The second category contains comparisons of FIX vs. C-FIX, MAX vs. C-MAX, MIN vs. C-MIN, MRMR vs. C-MRMR, ReliefF vs. C-ReliefF, LA vs. C-LA, and mSSa vs. C-mSSa.
1) From the results in Table 6 (a1) and (a2), it can be found that the forecasts based on the decomposed data are more accurate than based on the original data. Take the results from Guangzhou as an example. The maximum MAPE of the forecasts based on decomposed data (
2) The strategy of “decomposition and ensemble” to remove noise contributes to improving the forecasting accuracy. The figures in Table 6 (b1) and (b2) show the forecasting results of combined systems. Take ZH as an example, the values of the indicators of the mSSa combination method are (1.177 2, 1.671 2, 5.261 2%)MAE, RMSE, MAPE. But, the results obtained by the proposed cEEMDan-mSSa based method are (0.564 2, 0.775 0, 2.740 4%)MAE, RMSE, MAPE, these three values are lower compared to the index results of mSSa based combined method. The same relationship can be found in the indicator results for GZ and SZ.
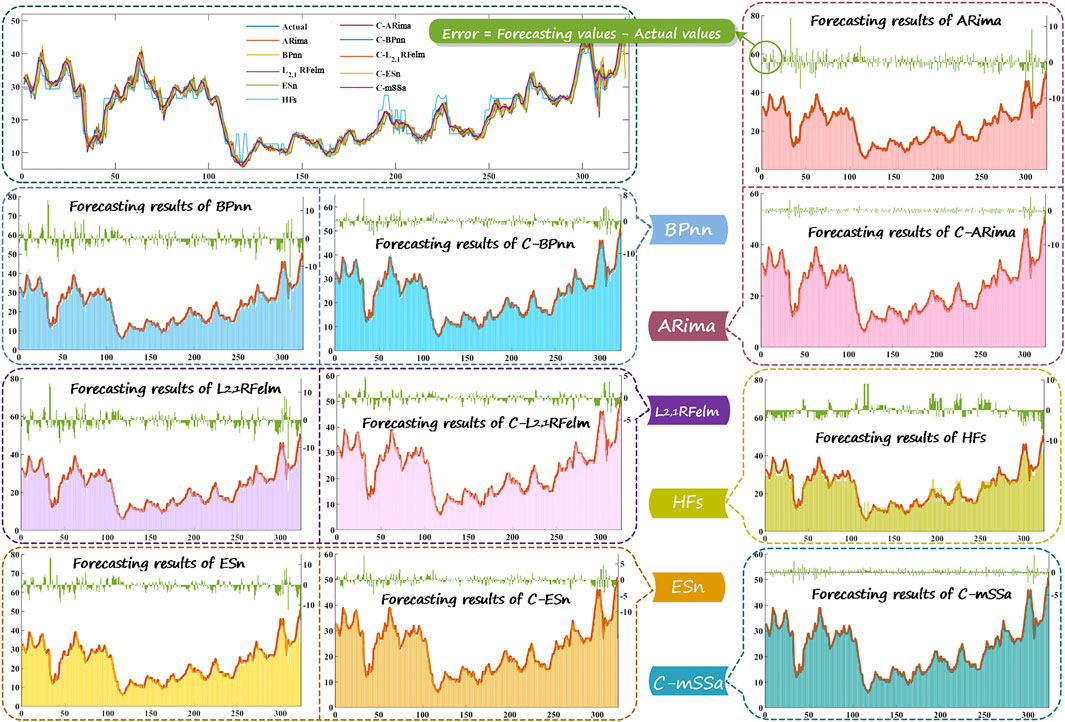
FIGURE 2. The forecasting results of the different models, where “C-” represents the forecasting models combined with cEEMDan.
Then, by comparing the remaining figures, it can be found that the values of indicators for systems without combining data decomposition strategy are smaller than the values of combining data decomposition strategy except for the MIX combined method. Take GZ as an example, all the values of MAE are greater than 1 of the method without combining cEEMDan (MAEGZ > 1), but the values of these indicators are less than 1 for the method combining cEEMDan except for MAX and MIX combined methods (
Remark: Through the comparisons between the models combining the cEEMDan and models without combining cEEMDan, what can be found is that the data decomposition strategy can effectively improve the prediction ability of the model.
3.4.2 Comparison II
This comparison is set to compare the combination methods. These methods contain four numerical methods (FIX1, MAX2, MIN3, MIX4), two feature selection methods (MRMR, ReliefF), and two optimization algorithms, the Lichtenberg algorithm (LA) and mSSa. The results in Table 6 (b1) and (b2), and Figure 3 demonstrate that after data decomposition, the forecasting accuracy is improved. Moreover, the proposed combined model performance is best. The detailed analyses are as follows.
1) The multi-objective optimization method is the best weighting method. For the results in Table 6 (b1), it can be seen that the indicators’ values of mSSa are the smallest. Take GZ as an example, the indicators’ values of mSSa are (1.123 2, 1.515 7, 5.899 2%)MAE, RMSE, MAPE, the minimum indicators’ values of the numerical methods are
2) Check the results in Table 6 (b2), take SZ as an example, the MAE of numerical methods are (0.9307, 9.8564,0.7709, 11.8266)FIX, MAX, MIN, MIX, MAE of feature selected methods are (0.7951, 0.9448)MRMR, ReliefF, and for the optimization methods are (0.5837, 0.5670)LA, mSSa. And min(MAE)
3) The forecasts of the proposed combined system are more accurate than the mSSa based system. As the forecasting results shown in Table 6 (b1) and (b2), the MAE values of the proposed combined system in the three study cities are MAEC−mSSa = (0.477 6, 0.567 0, 0.564 2)GZ,SZ,ZH, these values are less than 0.6, but the MAE values of the system based on the original data are greater than 1.1 for three study cites (MAEmSSa = (1.123 2, 1.222 7, 1.177 2)GZ,SZ,ZH). Moreover, the MAPE values of the proposed system are MAPEC−mSSa = (2.357 6%, 2.787 9%, 2.740 4%)GZ,SZ,ZH, compared to the mSSa-based system they are improved by (60.04, 56.65, 47.91%)GZ,SZ,ZH5. Since the smaller the values of the three metrics, the better the forecasting. Therefore, the results of these metrics indicate that the proposed combined system is performing better than the other system. The same conclusion can be drawn from the values of RMSE.
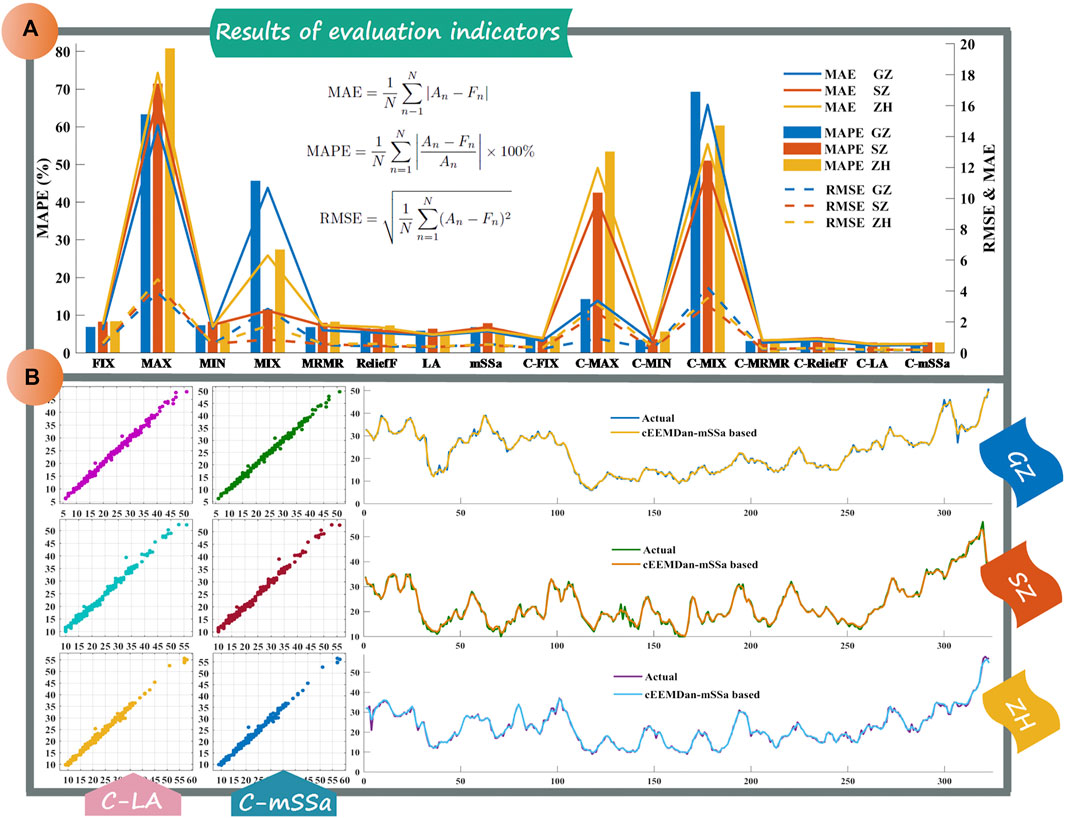
FIGURE 3. The forecasting results of the different combined methods. (A) is the results of evaluation indicators of three study cities. (B) is the forecasting results of C-LA and C-mSSa, where “C-” represents the cEEMDan.
Remark: The optimization algorithm combination methods are performing better than the other combination methods, especially better than the numerical combination methods. The weights determined by the numerical methods only consider part of the samples, so when the data fluctuates greatly, this type of method cannot get good forecasting results. And the weights determined by the feature selection methods and the optimization algorithms consider all the samples, including samples with large fluctuations, so the impact of large fluctuations can be reduced during the forecasting process.
3.4.3 Comparison III
This experiment compares the forecasting performance of the individual forecasting models and the combined forecasting system. The proposed forecasting system performs better than the individual forecasting models. Almost all the indicators’ values in the Table 6 (b1) and (b2) are smaller than those in the Table 6 (a1) and (a2), except for the MAX combination method and MIX combination method. Based on the data of SZ, the min(MAPESZ)
In summary, the following conclusions can be drawn. The data decomposition strategy can significantly improve forecasting accuracy. These experimental results show that the forecasting results of all methods combined with cEEMDan, except MIX, are more accurate than the methods not combined with cEEMDan. In addition, the mSSa method has the best forecasting results among these combined methods, thus proving the forecasting performance of the proposed system is best.
Remark: For forecasting, data preprocessing is important. In this study, a powerful data decomposition strategy was used to decompose the original data series, and then discarded the noise component of the series. This processing improves the accuracy of the forecasting, and this conclusion is reached in two experiments. For combination, the multi-objective optimization method works better, and the numerical methods are the worst, and the performance is unstable. When the results of other methods become better, the numerical method performs worse.
4 Test of Forecasting System
In order to verify the significance and stability of the proposed forecasting system, the Diebold-Mariano test (DM) (Francis and Roberto, 1995) and the variance ratio (VR) are introduced in this study. The related details and results are described in this section.
4.1 Diebold-Mariano Test
DM is a hypothesis testing method to analyze the difference in prediction accuracy. According to the constructed DM statistics, it can be judged whether the difference of the prediction method is significant. In this test, the null hypothesis (H0) and the alternative hypothesis (H1) are as follows:
here
where S2 denotes the variance estimation of
Given a certain significance level α, the critical value Zα/2 can get, if the absolute value of DM statistic is greater than the Zα/2, the null hypothesis H0 is rejected, and the result that two forecasting methods have significant differences.
Table 7 gives the DM test results of different forecasting models. This study compares 24 forecasting models or systems with the proposed system. Compared with the forecasting model without cEEMDan, the proposed forecasting system is significantly better, since the values of DM statistic are greater than the critical value of 1% significance level. After combined with cEEMDan, the forecasting ability of individual forecasting models has been improved, but the DM test results show that their predictive ability is still inferior to the proposed forecasting system, since the lowest value of DM test is between the critical value of 10% significance level and the critical value of 15% significance level. The DM values of Table 7 (b) also show that the proposed forecasting system is significantly superior than the other combined forecasting system, especially the system without data decomposition strategy.
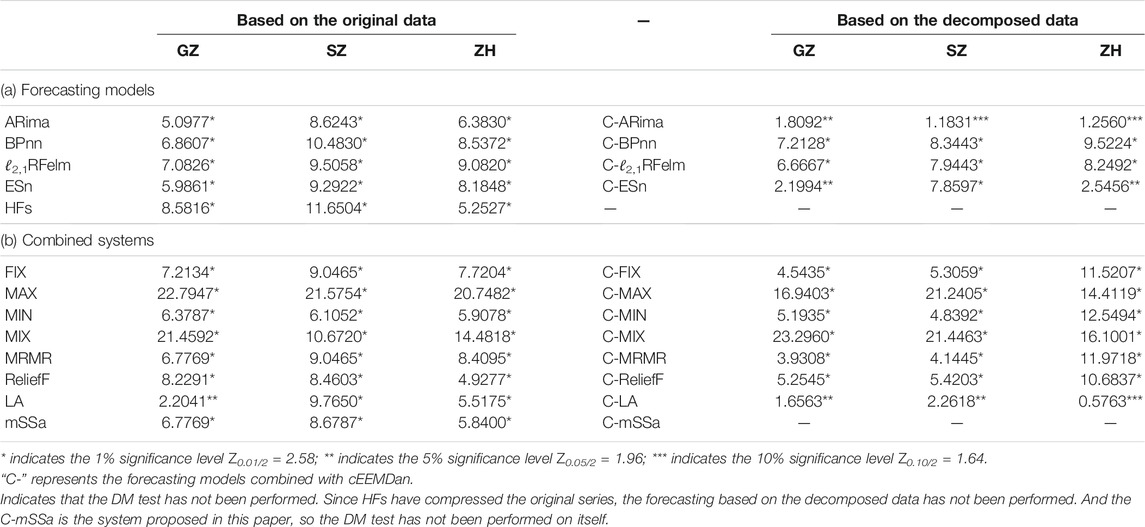
TABLE 7. DM test results of different models.
4.1.1 Stability Test
In order to validate the stability of models, the variance ratio (Vr) is introduced. Vr combines the variances of the forecasting value and the true value to illustrate the stability of the forecasting model. The greater the value of Vr, the higher the forecasting stability of the method (Huang et al., 2021).
here, Varforecasting and Varactual are the variances of the forecasting values and actual values.
The Vr results are shown in Table 8. The Vr values of the proposed system in the three cities are (0.986 1, 0.998 6, 0.985 9)GZ,SZ,ZH. Although the Vr values of the proposed system are not the largest among all forecasting models and systems, these three values are all greater than 0.98, while the Vr values of most other forecasting models and systems are less than 0.98, indicating that the proposed forecasting system is relatively stable. Combined with the results of the forecasting evaluation metric shown in section 3, it shows that the proposed forecasting system has high prediction accuracy and relatively high stability.
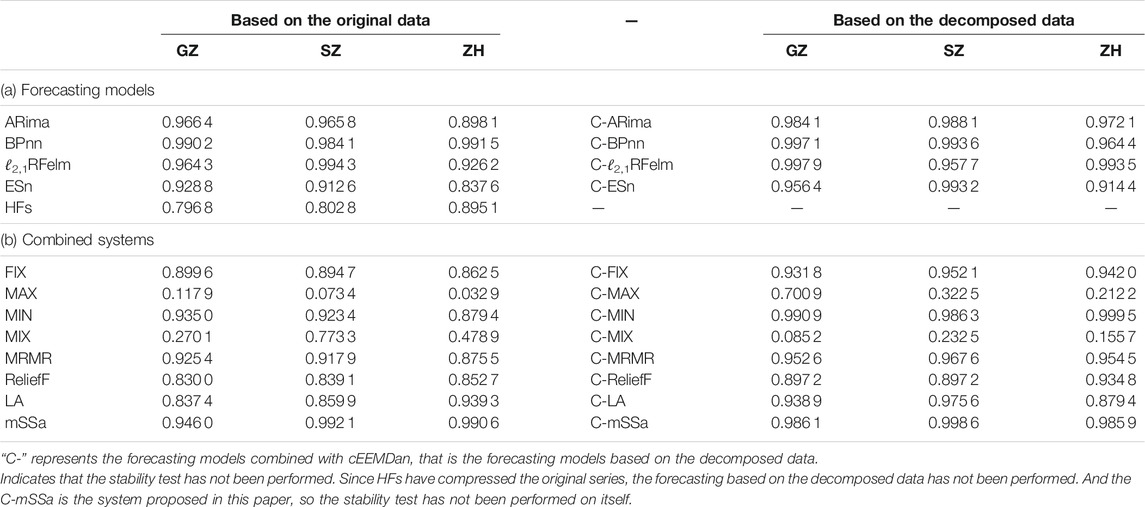
TABLE 8. Results of the model stability test.
5 Conclusion
Based on the multi-objective optimization algorithm and data decomposition strategy, an effective combined forecasting system is proposed to forecast the PM2.5 concentration from Guangzhou, Shenzhen, and Zhuhai in China. The proposed system mainly contains three modules, the data preprocessing module, the individual model forecasting module, and the combination forecasting module. In the first module, the strategy of “decomposition and ensemble” is applied to remove the noise in the original series. In the individual model forecasting module, ARima, BPnn, ℓ2,1RFelm, ESn, and HFs are applied to forecast PM2.5 concentration respectively. These five models are from different kinds of forecasting models and are used to analyze different features in the PM2.5 concentration series. ARima is a classical traditional statistical forecasting method; BPnn, ℓ2,1RFelm, and ESn are neural networks with different characteristics; hesitant fuzzy time series model is a fuzzy-based forecasting model. By comparing eight weighting methods from three categories, the best combination method is found as a multi-objective optimization weighting method.
The developed combined forecasting system has been successfully applied in PM2.5 concentration forecasting. Based on the forecasting evaluation indicators, the forecasting performance of the proposed system is validated. Specifically, compared the models forecasting results based on data before and after the preprocessing of cEEMDan in Comparison I. In Comparison II, compare the system employing diverse combination methods. Compere between the individual models and the combined models in Comparison III. After these comparative experiments, it can be observed that the MAE and MAPE values of the proposed system are always lower than the values of individual models and other combination methods. For RMSE in Guangzhou, the value of the proposed system is slightly higher than the minimum RMSE value, but overall, the forecasting performance of the proposed system is still the best. Therefore, the proposed combined forecasting system, which combines different types of individual forecasting models, has high practical application potential in air pollution concentration forecasting.
Data Availability Statement
Publicly available datasets were analyzed in this study. This data can be found here: http://www.mep.gov.cn/.
Author Contributions
LB: Conceptualization, Methodology, Software, Writing-Original draft preparation. HL: Conceptualization, Software, Validation. BZ: Conceptualization, Supervision, Writing-Reviewing and Editing. XH: Conceptualization, Writing—Review and Editing, Data curation.
Funding
This work was supported by Major Program of National Social Science Foundation of China (Grant No. 17ZDA093).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1FIX represents a weighting method with fixed weights, and the weight of each forecasting model is 0.2.
2MAX represents the method of using the maximum forecasting error to assign weights, and the weight of each forecasting model is the reciprocal of the maximum forecasting error obtained by each model in the training set.
3MIN is opposite to MAX, using the minimum value of the forecasting error is used as the basis for weighting, the weight of wach methode is caluculated as
4For MIX weighting method, the weight of each model is obtained by following equation: wi = mean(|ein|/An), i = 1, … , 5; n = 1.⋯ , N, here the ein is forecasting errors of i-th model, An is the actual value of PM2.5 concentration.
5The improved percentage is calculated as follows:
References
Ariyo, A. A., Adewumi, A. O., and Ayo, C. K. (2014). “Stock price Prediction Using the Arima Model,” in 2014 UKSim-AMSS 16th International Conference on Computer Modelling and Simulation (Cambridge, UK: IEEE), 106–112. doi:10.1109/uksim.2014.67
Benvenuto, D., Giovanetti, M., Vassallo, L., Angeletti, S., and Ciccozzi, M. (2020). Application of the Arima Model on the Covid-2019 Epidemic Dataset. Data in brief 29, 105340. doi:10.1016/j.dib.2020.105340
Bisht, K., and Kumar, S. (2016). Fuzzy Time Series Forecasting Method Based on Hesitant Fuzzy Sets. Expert Syst. Appl. 64, 557–568. doi:10.1016/j.eswa.2016.07.044
Cheng, S.-H., Chen, S.-M., and Jian, W.-S. (2016). Fuzzy Time Series Forecasting Based on Fuzzy Logical Relationships and Similarity Measures. Inf. Sci. 327, 272–287. doi:10.1016/j.ins.2015.08.024
Cheng, X., Liu, Y., Xu, X., You, W., Zang, Z., Gao, L., et al. (2019). Lidar Data Assimilation Method Based on Crtm and Wrf-Chem Models and its Application in pm2.5 Forecasts in Beijing. Sci. Total Environ. 682, 541–552. doi:10.1016/j.scitotenv.2019.05.186
Dėdelė, A., and Miškinytė, A. (2019). Seasonal and Site-specific Variation in Particulate Matter Pollution in lithuania. Atmos. Pollut. Res. 10, 768–775. doi:10.1016/j.apr.2018.12.004
Francis, X., and Roberto, S. (1995). Comparing Predictive Accuracy. J. Business Econ. Stat. 13, 134. doi:10.1080/07350015.1995.10524599
Gavirangaswamy, V. B., Gupta, G., Gupta, A., and Agrawal, R. (2013). “Assessment of Arima-Based Prediction Techniques for Road-Traffic Volume,” in Proceedings of the fifth international conference on management of emergent digital EcoSystems, 246–251. doi:10.1145/2536146.2536176
Glencross, D. A., Ho, T.-R., Camiña, N., Hawrylowicz, C. M., and Pfeffer, P. E. (2020). Air Pollution and its Effects on the Immune System. Free Radic. Biol. Med. 151, 56–68. doi:10.1016/j.freeradbiomed.2020.01.179
Goyal, P., Chan, A. T., and Jaiswal, N. (2006). Statistical Models for the Prediction of Respirable Suspended Particulate Matter in Urban Cities. Atmos. Environ. 40, 2068–2077. doi:10.1016/j.atmosenv.2005.11.041
Grennfelt, P., Engleryd, A., Forsius, M., Hov, Ø., Rodhe, H., and Cowling, E. (2020). Acid Rain and Air Pollution: 50 Years of Progress in Environmental Science and Policy. Ambio 49, 849–864. doi:10.1007/s13280-019-01244-4
Gündüz, D., de Kerret, P., Sidiropoulos, N. D., Gesbert, D., Murthy, C. R., and van der Schaar, M. (2019). Machine Learning in the Air. IEEE J. Selected Areas Commun. 37, 2184–2199.
Haimes, Y. Y., Hall, W. A., and Freedman, H. T. (2011). Multiobjective Optimization in Water Resources Systems: The Surrogate worth Trade-Off Method. Amsterdam, Netherlands: Elsevier.
Hecht-Nielsen, R. (1992). “Theory of the Backpropagation Neural Network**Based on "nonindent" by Robert Hecht-Nielsen, Which Appeared in Proceedings of the International Joint Conference on Neural Networks 1, 593-611, June 1989. 1989 IEEE,” in Neural Networks for Perception (Amsterdam, Netherlands: Elsevier), 65–93. doi:10.1016/b978-0-12-741252-8.50010-8
Henrique, B. M., Sobreiro, V. A., and Kimura, H. (2019). Literature Review: Machine Learning Techniques Applied to Financial Market Prediction. Expert Syst. Appl. 124, 226–251. doi:10.1016/j.eswa.2019.01.012
Huang, X., Wang, J., and Huang, B. (2021). Two Novel Hybrid Linear and Nonlinear Models for Wind Speed Forecasting. Energ. Convers. Manage. 238, 114162. doi:10.1016/j.enconman.2021.114162
Hyndman, R. J., and Athanasopoulos, G. (2018). Forecasting: Principles and Practice. Melbourne, Australia: OTexts.
Jaeger, H., and Haas, H. (2004). Harnessing Nonlinearity: Predicting Chaotic Systems and Saving Energy in Wireless Communication. science 304, 78–80. doi:10.1126/science.1091277
Khair, U., Fahmi, H., Hakim, S. A., and Rahim, R. (2017). Forecasting Error Calculation with Mean Absolute Deviation and Mean Absolute Percentage Error. J. Phys. Conf. Ser. 930, 012002. doi:10.1088/1742-6596/930/1/012002
Kurt, A., Gulbagci, B., Karaca, F., and Alagha, O. (2008). An Online Air Pollution Forecasting System Using Neural Networks. Environ. Int. 34, 592–598. doi:10.1016/j.envint.2007.12.020
Liu, B., Yu, X., Chen, J., and Wang, Q. (2021). Air Pollution Concentration Forecasting Based on Wavelet Transform and Combined Weighting Forecasting Model. Atmos. Pollut. Res. 12, 101144. doi:10.1016/j.apr.2021.101144
Liu, H., Xu, Y., and Chen, C. (2019). Improved Pollution Forecasting Hybrid Algorithms Based on the Ensemble Method. Appl. Math. Model. 73, 473–486. doi:10.1016/j.apm.2019.04.032
Lu, W., Chen, X., Pedrycz, W., Liu, X., and Yang, J. (2015). Using Interval Information Granules to Improve Forecasting in Fuzzy Time Series. Int. J. Approximate Reasoning 57, 1–18. doi:10.1016/j.ijar.2014.11.002
Manisalidis, I., Stavropoulou, E., Stavropoulos, A., and Bezirtzoglou, E. (2020). Environmental and Health Impacts of Air Pollution: a Review. Front. Public Health 8, 14. doi:10.3389/fpubh.2020.00014
Mirjalili, S., Gandomi, A. H., Mirjalili, S. Z., Saremi, S., Faris, H., and Mirjalili, S. M. (2017a). Salp Swarm Algorithm: A Bio-Inspired Optimizer for Engineering Design Problems. Adv. Eng. Softw. 114, 163–191. doi:10.1016/j.advengsoft.2017.07.002
Mirjalili, S., Jangir, P., and Saremi, S. (2017b). Multi-objective Ant Lion Optimizer: a Multi-Objective Optimization Algorithm for Solving Engineering Problems. Appl. Intell. 46, 79–95. doi:10.1007/s10489-016-0825-8
Mousavi, S. S., Goudarzi, G., Sabzalipour, S., Rouzbahani, M. M., and Mobarak Hassan, E. (2021). An Evaluation of Co, Co2, and So2 Emissions during Continuous and Non-continuous Operation in a Gas Refinery Using the Aermod. Environ. Sci. Pollut. Res. 28, 56996–57008. doi:10.1007/s11356-021-14493-2
Ngatchou, P., Zarei, A., and El-Sharkawi, A. (2005). “Pareto Multi Objective Optimization,” in Proceedings of the 13th International Conference on, Intelligent Systems Application to Power Systems (Arlington, VA, USA: IEEE), 84–91.
Niska, H., Hiltunen, T., Karppinen, A., Ruuskanen, J., and Kolehmainen, M. (2004). Evolving the Neural Network Model for Forecasting Air Pollution Time Series. Eng. Appl. Artif. Intelligence 17, 159–167. doi:10.1016/j.engappai.2004.02.002
Niu, X., and Wang, J. (2019). A Combined Model Based on Data Preprocessing Strategy and Multi-Objective Optimization Algorithm for Short-Term Wind Speed Forecasting. Appl. Energ. 241, 519–539. doi:10.1016/j.apenergy.2019.03.097
Organization, W. H. (2014). 7 Million Premature Deaths Annually Linked to Air Pollution. Geneve, Switzerland: WHO.
Pai, P.-F., and Lin, C.-S. (2005). A Hybrid Arima and Support Vector Machines Model in Stock price Forecasting. Omega 33, 497–505. doi:10.1016/j.omega.2004.07.024
Qiao, J., Li, F., Han, H., and Li, W. (2016). Growing echo-state Network with Multiple Subreservoirs. IEEE Trans. Neural Netw. Learn. Syst. 28, 391–404. doi:10.1109/TNNLS.2016.2514275
Rahimi, A., and Recht, B. (2007). “Random Features for Large-Scale Kernel Machines,” in Proceedings of the 20th International Conference on Neural Information Processing Systems (New York: Curran Associates Inc.), 1177–1184.
Singh, S. R. (2007). A Simple Method of Forecasting Based on Fuzzy Time Series. Appl. Math. Comput. 186, 330–339. doi:10.1016/j.amc.2006.07.128
Song, Q., and Chissom, B. S. (1993). Fuzzy Time Series and its Models. Fuzzy sets Syst. 54, 269–277. doi:10.1016/0165-0114(93)90372-o
Torra, V., and Narukawa, Y. (2009). “On Hesitant Fuzzy Sets and Decision,” in 2009 IEEE International Conference on Fuzzy Systems (Jeju, South Korea: IEEE), 1378–1382. doi:10.1109/fuzzy.2009.5276884
Torres, M. E., Colominas, M. A., Schlotthauer, G., and Flandrin, P. (2011). “A Complete Ensemble Empirical Mode Decomposition with Adaptive Noise,” in 2011 IEEE international conference on acoustics, speech and signal processing (ICASSP) (Prague, Czech Republic: IEEE), 4144–4147. doi:10.1109/icassp.2011.5947265
Volk, M. J., Lourentzou, I., Mishra, S., Vo, L. T., Zhai, C., and Zhao, H. (2020). Biosystems Design by Machine Learning. ACS Synth. Biol. 9, 1514–1533. doi:10.1021/acssynbio.0c00129
Wang, J., Du, P., Hao, Y., Ma, X., Niu, T., and Yang, W. (2020a). An Innovative Hybrid Model Based on Outlier Detection and Correction Algorithm and Heuristic Intelligent Optimization Algorithm for Daily Air Quality index Forecasting. J. Environ. Manag. 255, 109855. doi:10.1016/j.jenvman.2019.109855
Wang, J., Li, H., Wang, Y., and Lu, H. (2021a). A Hesitant Fuzzy Wind Speed Forecasting System with Novel Defuzzification Method and Multi-Objective Optimization Algorithm. Expert Syst. Appl. 168, 114364. doi:10.1016/j.eswa.2020.114364
Wang, J., Li, Q., and Zeng, B. (2021b). Multi-layer Cooperative Combined Forecasting System for Short-Term Wind Speed Forecasting. Sustainable Energ. Tech. Assessments 43, 100946. doi:10.1016/j.seta.2020.100946
Wang, J., Niu, T., Lu, H., Yang, W., and Du, P. (2019). A Novel Framework of Reservoir Computing for Deterministic and Probabilistic Wind Power Forecasting. IEEE Trans. Sustain. Energ. 11, 337–349.
Wang, J., Wang, Y., Li, Z., Li, H., and Yang, H. (2020b). A Combined Framework Based on Data Preprocessing, Neural Networks and Multi-Tracker Optimizer for Wind Speed Prediction. Sustain. Energ. Tech. Assessments 40, 100757. doi:10.1016/j.seta.2020.100757
Wang, J., Yang, W., Du, P., and Niu, T. (2020c). Outlier-robust Hybrid Electricity price Forecasting Model for Electricity Market Management. J. Clean. Prod. 249, 119318. doi:10.1016/j.jclepro.2019.119318
Wang, Y.-H., Yeh, C.-H., Young, H.-W. V., Hu, K., and Lo, M.-T. (2014). On the Computational Complexity of the Empirical Mode Decomposition Algorithm. Physica A: Stat. Mech. its Appl. 400, 159–167. doi:10.1016/j.physa.2014.01.020
Wang, Y., Wang, J., Li, Z., Yang, H., and Li, H. (2021c). Design of a Combined System Based on Two-Stage Data Preprocessing and Multi-Objective Optimization for Wind Speed Prediction. Energy 231, 121125. doi:10.1016/j.energy.2021.121125
Yang, H., Zhu, Z., Li, C., and Li, R. (2020). A Novel Combined Forecasting System for Air Pollutants Concentration Based on Fuzzy Theory and Optimization of Aggregation Weight. Appl. Soft Comput. 87, 105972. doi:10.1016/j.asoc.2019.105972
Zadeh, L. A. (1996). “Fuzzy Sets,” in Fuzzy Sets, Fuzzy Logic, and Fuzzy Systems: Selected Papers by Lotfi A Zadeh (Singapore: World Scientific), 394–432. doi:10.1142/9789814261302_0021
Zhang, L., Lin, J., Qiu, R., Hu, X., Zhang, H., Chen, Q., et al. (2018). Trend Analysis and Forecast of pm2.5 in Fuzhou, china Using the Arima Model. Ecol. Indicators 95, 702–710. doi:10.1016/j.ecolind.2018.08.032
Zhou, S., Liu, X., Liu, Q., Wang, S., Zhu, C., and Yin, J. (2016). Random Fourier Extreme Learning Machine with ℓ2,1-Norm Regularization. Neurocomputing 174, 143–153. doi:10.1016/j.neucom.2015.03.113
Keywords: combined forecasting model, air pollution forecasting, improved extreme learning machine, data decomposition, multi-objective optimization approach, fuzzy computation and forecasting
Citation: Bai L, Li H, Zeng B and Huang X (2022) Design of a Combined System Based on Multi-Objective Optimization for Fine Particulate Matter (PM2.5) Prediction. Front. Environ. Sci. 10:833374. doi: 10.3389/fenvs.2022.833374
Received: 11 December 2021; Accepted: 17 January 2022;
Published: 25 February 2022.
Edited by:
Yiliao Song, University of Technology Sydney, AustraliaReviewed by:
Tong Niu, Zhengzhou University, ChinaDanxiang Wei, Macau University of Science and Technology, China
Copyright © 2022 Bai, Li, Zeng and Huang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hongmin Li, bGhtQG5lZnUuZWR1LmNu