 Ziyu Zhang1*
Ziyu Zhang1* Yirong Ye2Lin Xue1
Yirong Ye2Lin Xue1 Baofeng Tang1Lei He3Hongtao Zhao1Pengliang Zhang1Shengxia Sun1Jie Fan1
Baofeng Tang1Lei He3Hongtao Zhao1Pengliang Zhang1Shengxia Sun1Jie Fan1- 1State Grid Xiongan New Area Electric Power Supply Company, Xiongan New Area, China
- 2State Grid Fuzhou Electric Power Supply Company, Fuzhou, China
- 3State Grid Hebei Electric Power Research Institute, Shijiazhuang, China
The transformation of energy structure has brought about new changes in the power system, and the environmentally friendly gas switchgear with the goal of low carbon and environmental protection has been widely spread and applied, but due to its short application time and the accumulation of related research, it continues to carry out life prediction to improve the related operation and maintenance system. The article proposes the environmental protection gas switchgear data processing technology based on data enhancement technology, proposes the environmental protection gas switchgear life prediction technology based on approximate dynamic planning, and verifies the algorithm through case analysis, which proves the effectiveness and accuracy of the proposed method.
1 Introduction
In recent decades, the global energy consumption pattern has undergone significant changes, and the traditional energy consumption pattern can no longer meet the requirements of the current low-carbon development. Sulfur hexafluoride, as an insulating arc extinguishing medium, is widely used in electrical equipment. However, its ultrahigh global warming potential makes it one of the six greenhouse gases whose emission is restricted under the Kyoto Protocol. Traditional sulfur hexafluoride switchgear can’t meet the demand of green development, and the environmentally friendly gas switchgear using dry gas as the noon of the sky can effectively reduce the emission of greenhouse gases, unlocking more environmental benefits and economic benefits. However, due to the short application time of environmentally friendly gas switchgear, long-term use experience has not been obtained, and it is impossible to predict its remaining electric life. Therefore, with the advancement of active distribution network, it is necessary to predict the life of switchgear to realize active repair.
Switchgear life prediction research is mainly divided into empirical model prediction and gray box model prediction. Empirical models are based on accurate physical modeling, and their parameters are determined by a large amount of operational data and historical experience, which can realize more accurate life prediction for a single type of switchgear. At present, typical empirical models for life prediction include failure physical models, data-driven models, and so on. Among them, some scholars have used the Coffin-Manson model (Panarello et al., 2016) to reveal the relationship between mechanical fatigue life and plastic strain; some scholars have established a power device life model based on the theory of device fatigue damage through the IGBT power cycling test (Li et al., 2020); and the structure of the simulation is based on the fast state mapping, module topology and detailed electro-thermal modeling of devices (Ceccarelli et al., 2019) can complete the life prediction of power modules; the finite element method can construct the electro-thermal and life model of impedance-sourced photovoltaic micro-converters (Shen et al., 2018) The Coffin-Manson formula based on strain and fixed mesh size (Fu et al., 2020) can predict the fatigue damage of solder balls. 2020) can predict the fatigue life of solder balls. The above life prediction methods based on failure physics models can make more accurate predictions for a single component, but they are not universal and cannot be applied to scenarios with complex component structures. For data-driven modeling, some scholars proposed a novel multi-step robust prediction machine (Me et al., 2021) to complete the RUL online prediction; some scholars established an exponential decay model successfully fitted with experimental data (Dusmez et al., 2016) and processed the data by the classical least squares method to complete the residual service life prediction of degraded power MOSFETs; using data-driven and modeling methods, the remaining service life of the degraded power MOSFETs can be predicted. Prediction; Lifetime prediction of impedance devices can be accomplished by utilizing a data-driven and model predictive control algorithm (Celaya et al., 2011); A deep learning algorithm based on stacked long and short-term memories (Baharani et al., 2019) has been proposed for performing collective lifetime prediction of converters; Application of the cuckoo search algorithm (Anand et al., 2020) can be implemented for maximum power point tracking under partial coloring conditions. Data-driven models can obtain the life prediction patterns of components from a large amount of operational data, but it is difficult to ensure the accuracy of life prediction under the influence of multidimensional feature quantity.
In recent years, research for gray box models has focused on deep learning, reinforcement learning, migration learning and approximate dynamic programming. Among them, some scholars (Ender et al., 2021; Omid et al., 2023) have used deep deterministic policy gradient algorithms based on re-enforcement learning and deep reinforcement learning for controlling converter power switching management and storage unit switching management in switching devices; the deep learning algorithms can be used to predict the battery operating state of lithium-ion batteries, the residual life interval of the device and the IGBT residual life (Chen et al., 2022; Ma et al., 2023; Gang et al., 2024); a fusion of Time Attention - Temporal Convolutional Networks (TA- TCN) and transfer learning (Zhang et al., 2023) for rolling bearing life prediction; In terms of system predictive scheduling, there have also been studies by scholars (Saha et al., 2023) who have proposed a medium-voltage grid-connected public multiport FC/discharge (DC) station that connects all three plug-in electric vehicle (PEV) categories simultaneously, facilitating bidirectional power flow for vehicle-to-grid (V2G) applications. Some scholars (Kumar et al., 2023) have developed a model predictive control battery management system based on voltage sensor, which can effectively predict the state of the battery system in a certain period of time. Some scholars (Chen et al., 2022) have proposed a fixed control system based on complex dynamic networks, and solved the basic problems of neural network stability, synchronization and controllability, but this paper does not solve the problem that complex dynamic networks are prone to overfitting. Some scholars (Yousaf et al., 2022) have proposed an adaptive reclosing scheme based on genetic algorithm, which can classify all fault events in the reclosing area or block reclosing area, but the adaptive genetic algorithm is difficult to avoid falling into the problem of local optimal solution. In order to solve the problem of electric ship docking, some scholars (Kumar and Panda, 2023a; Kumar and Panda, 2023b) proposed a new type of power quality improvement cold ironing (PQICI) system (charging mechanism) and an intelligent high-power charging network and its control mechanism for port cold ironing, respectively, and combined with the analysis of numerical examples to verify the effectiveness of the proposed method in the planning of electric ship parking charging scheme.
Since the life prediction of switchgear is a multi-stage problem and is affected by random quantities such as ambient temperature and humidity, the approximate dynamic programming algorithm for the multi-stage stochastic optimization problem can be more effective in solving the life prediction problem of environmentally friendly gas switchgear. The gray box model is suitable for life prediction of equipment with complex component structure and many feature quantities, which is more in line with the application scenario of environmental protection gas switchgear, so this paper adopts the gray box model to approximate the life function of environmental protection gas switchgear and the use of an approximate dynamic programming algorithm (Li et al., 2023) to optimize a non-trivial rolling bearing life prediction with model errors and external perturbations. Errors and external perturbations to improve the life prediction accuracy of nonlinear systems. Some scholars (Zhu et al., 2023) have used approximate dynamic programming to solve the real-time risk avoidance scheduling problem of power and natural gas integrated system. Some scholars (Fan et al., 2023) have solved the problem of robust optimal scheduling of permanent magnet synchronous motors by using approximate dynamic programming. There are also scholars (Li et al., 2022) who have mixed MPC and ADP to solve the multi-stage real-time stochastic scheduling problem of grid-connected multi-energy grids, and these studies have proved the superiority of approximate dynamic programming in solving system and equipment prediction and real-time scheduling.
In summary, this paper proposes to firstly process a large amount of operational data obtained from sensors, and carry out correlation and normalization calculations to determine the decision variables; then solve the multi-stage stochastic optimization problem of life prediction of environmentally friendly gas switchgear cabinet through an approximate dynamic programming algorithm combined with a neural network; and finally carry out a case study of a regional distribution network in a certain area to simulate and verify the accuracy and validity of the model and methodology of life prediction of environmentally friendly gas switchgear cabinet proposed in this paper. Finally, a case study is carried out in a regional distribution network to simulate and verify the accuracy and effectiveness of the life prediction model and method proposed in this paper.
2 Residual electric life data processing for environmentally friendly gas switchgear
2.1 Data correlation processing
There are more feature parameters affecting the remaining life of environmentally friendly gas switchgear, and different feature parameters have different im-portance to the remaining life, and deleting the feature parameters with lower im-portance is conducive to improving the assessment accuracy. In this paper, we pro-pose an embedded feature selection method, which calculates the similarity based on the Mahalanobis distance, randomly selects the nearest neighbors by learning the feature weights and minimizing the objective function, and realizes the feature selection by using the leave-one-out method for cross-validation of the original dataset. The computational steps of feature selection are as follows:
2.1.1 Set up the transformation matrix A and calculate the marginal distance between features
For a data set with
2.1.2 Calculate the probability of a single feature data being correctly classified
The purpose of this method is to learn a metric to make the classification of new samples optimal, since the true distribution of the data itself is not known, the formula 1’s are introduced as the metric function. While using the leave-one-out method to calculate the error, the error function is not continuous with respect to A. Therefore, a differentiable softmax function needs to be introduced, i.e., Eqs 2, 3:
Where:
2.1.3 Optimize the transformation matrix
2.1.4 The original feature matrix X is filtered using the optimized transformation matrix and the feature subset X is denoted as Eq. 6:
The correlation between the feature parameters of the environmental protection gas switchgear varies, and the greater the correlation, the more similar the feature information is, the redundant feature information will increase the model burden, and the elimination of some of the feature parameters with high redundancy is conducive to the improvement of the assessment accuracy. Spearman’s rank correlation coefficient calculates the degree of correlation between the ranks of two variables, which is suitable for measuring the correlation between discrete data, categorical variables or rank variables. The Spearman’s rank correlation coefficient between a characteristic variable
Where:
2.2 Data enhancement technology
The whole-life process of the environmental gas switchgear is a long time sequence, and the historical information data are closely related in the time dimension, and further enhancement of the temporal sequence between the data can improve the accuracy of the model assessment. Data enhancement technology can make the data better adapt to the time series assessment model by enhancing the time series relationship between historical data. The data enhancement methods for time series are mainly categorized into transformation, averaging and statistical sampling, in which the transformation-based window slicing method can be applied not only to the training set but also to the test set, with better label retention and higher generalization to long time series data.
The dimensionality of the feature subset of environmentally friendly gas switchgear is greatly increased after data enhancement, and its dimensionality needs to be reduced to reduce the amount of model inputs. Stacked Denoising Auto Encoder (SDAE) builds a multilayered noise reduction autoencoding network based on DAE, and realizes feature fusion to reduce the data dimensionality. DAE is an improvement of neural network-based autoencoder (AE), which helps to improve its generalization ability.
The AE has a three-layer structure with input layer x, hidden layer h, and output layer x. Where, the input layer x is mapped to the hidden layer h through the encoder activation function f(x) and the expression can be expressed as Eq. 8:
Where
Where
When this error is the smallest, a better weight matrix W and bias term b are obtained. However, due to the fact that the features learned by AE are uniquely represented with the input data features, overfitting occurs when the parameters of the auto-coding network are complex, resulting in the reconstructed data does not have strong generalization ability and robustness. Therefore, a method of adding random noise to the input data is proposed, i.e., randomly destroying the input data with a certain probability, and reconstructing the input data x’ with the added noise to obtain the input layer x, whose weighting matrix is less noisy, and is thus called a noise-reducing autoencoder (DAE). The SDAE, on the other hand, is to stack several DAEs to form a deep architecture with the ability of deep nonlinear mapping, and to combine the previous The hidden layer h learned from the previous DAE is used as the input layer x of the next DAE, and so on until the last layer is trained.
3 Switchgear life prediction algorithm based on approximate dynamic programming
The life prediction curve of the environmental protection gas switchgear is a convex curve with negative and decreasing slope, and the electric life cycle can be divided into several time periods, and each period is approximated by a linear function, i.e., the life prediction function of the environmental protection gas switchgear is approximated as a segmented linear function. At each stage, it is necessary to make the decision that the current time period to the final time period is globally optimal, the decision is the slope approximation, and the global optimum is the final prediction that the life is close to the real life. This type of multistage stochastic optimization problem can be formulated as a Markov decision process and solved by dynamic programming. Dynamic programming (DP) can decompose a multi-stage problem into a single-stage problem with a transfer function to realize the transition between the previous and previous time periods. A Markov decision process usually contains state variables, decision variables, and stochastic variables, and the state variables of the before and after periods are connected by a transfer function.
State variables
The transfer function is the relationship between the state variables
Considering the above MDP elements, the objective function for switchgear life prediction can be redefined as:
By Bellman’s optimality principle, the tail problem of Eq. 12 can be expressed as Eq. 13 by dividing it by the time, in which,
The classical DP problem can be solved by solving the Bellman’s optimization equation in the reverse direction to obtain the value function of each possible state at a single moment, and then solving the Bellman’s equation in the forward direction to obtain the optimal solution according to the obtained value function. However, the scale of the problem in real power systems is usually large, and the excessively large state space and action space will bring about the problem of dimensional explosion, which makes it extremely difficult to compute the future value functions, i.e., the ‘dimensional catastrophe’ in the traditional DP problem. Therefore, in approximate dynamic programming (ADP), the approximation of the future value function by a segmented function can give an approximate optimal solution.
Due to the large computation of the expectation value in Eq. 13, the computation of the expectation value can be circumvented by using the post-decision state variable instead of the state variable, which refers to the state in which the system has been put into a decision-making process, but has not yet been injected with any exogenous stochastic information. The relationship between pre-decision state, post-decision state, decision and random variables is shown in Figure 1:
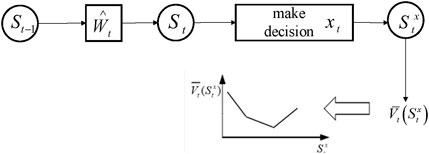
Figure 1. ADP decision-state transfer process.
After using post-decision state variables instead of state variables, the Bellman equation of the system can be expressed as Eq. 14.
Where:
Since the post-decision state variables and the value function are unknown, and
Where:
From above, the optimal value of the decision at time
ADP obtains the optimal decision for each time period by solving the objective function of each time period in a forward direction
When updating the slope of a segmented linear function, it is assumed that one iteration
In the slope update of the iteration
After updating the sampled observations of the state variables in the iteration
where:
4 Results
After inputting a large amount of historical operation data, the life prediction approximation curve of the environmental protection gas switchgear can be obtained. In this paper, seven relevant features are selected, including the number of switch actions, ambient temperature, ambient humidity, cable head temperature, maximum current, maximum load, and the number of local discharges, and the optimal subset of relevant features is selected using NCA feature importance analysis. Data enhancement technology is used to improve the missing operational data and correct errors to ensure data relevance. Figure 2 gives the relevant importance of different feature parameters on the life of the switchgear during operation. Figure 3 shows the heat map of Spearman’s correlation coefficient.
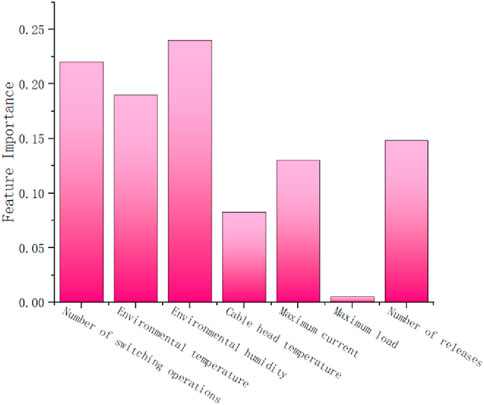
Figure 2. Importance analysis of environmentally friendly gas switchgear features.
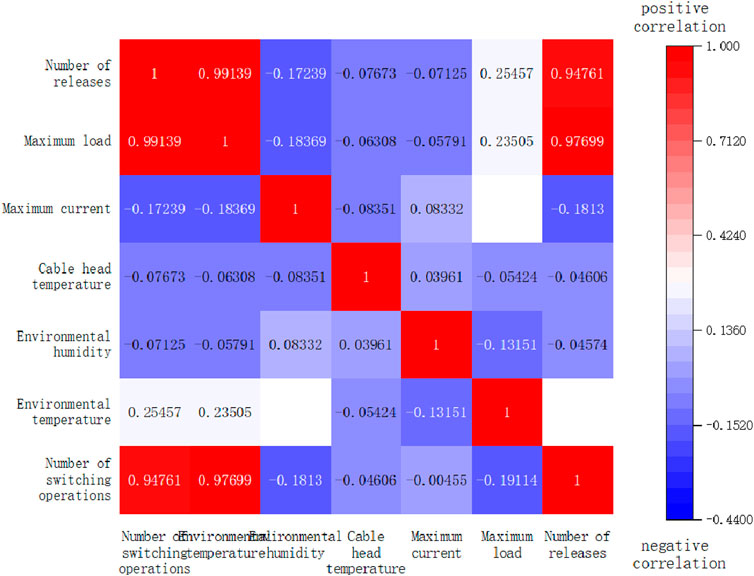
Figure 3. Correlation coefficient heat map.
According to the feature importance analysis of environmentally friendly gas switchgear cabinet, the average arc-firing power has the lowest importance to the remaining electric life and should be eliminated. In order to retain the effective information and avoid redundant calculations, this paper selects the number of switch actions, ambient temperature, ambient humidity, cable head temperature, maximum current, maximum load, and the number of local discharges as the optimal subset of features for the input of the model.
In order to reduce the difficulty of time prediction model training and computation, SDAE is utilized to downscale the high dimensional data after data enhancement. Figure 4 gives the error between the output and input layers under different feature fusion dimensions. When the enhanced time series data are fused to 5, 4, 3, 2 and 1 dimensions, the errors between the input and output layers are 0.0435, 0.0487, 0.0499, 0.1145 and 0.1866, respectively, which show that the errors are similar in 5, 4 and 3 dimensions, while the errors in 2 and 1 dimensions are obviously increased. Since low-dimensional data can reduce redundant information and improve the accuracy of the prediction model, fusion to dimension 3 is chosen when the difference between the error values of dimension 5, dimension 4 and dimension 3 is relatively small. The middle layer of DAE has only one layer, which has a limited ability to learn features, and the SDAE is constructed by stacking DAEs. In this paper, 1-layer DAE, 2-layer DAE and 3-layer DAE are constructed respectively, and the errors of their input and output layers are 0.0499, 0.0266 and 0.0398, respectively, and the error is minimized when constructing two-layer DAE, so the number of intermediate layers of the SDAE adopted in this paper is two layers.
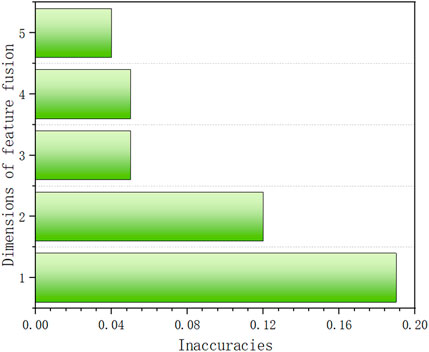
Figure 4. Error values for each dimension.
Combined with the actual situation, the model is sequentially selected as 70% for the training set, 20% for the validation set and 10% for the test set. The loss function for model training is shown in Figure 5.
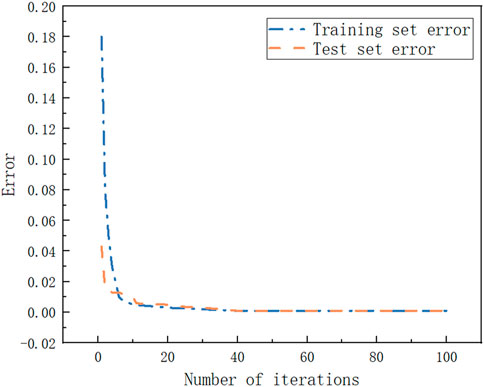
Figure 5. Training results.
When the number of iterations is before 35 times, the loss function curves of the training set and validation set show a decreasing trend; when the number of iterations reaches 35 times, the loss function completely converges, after which the loss function of the validation set does not show an increasing trend, there is no overfitting, and the model training effect reaches the optimal.
Currently for equipment life prediction, the mainstream prediction algorithms are RNN, LSTM and BiGRU, and this paper compares the proposed ADP algorithm with the above three algorithms. Figure 6 shows the error rates of the test set prediction results of the four algorithms, where subgraph A represents RNN, subgraph B represents LSTM, subgraph C represents BiGRU, and subgraph D represents ADP, and it can be seen that the error of the ADP algorithm proposed in this paper is the smallest among the four methods after sorting according to the error from the smallest to the largest.
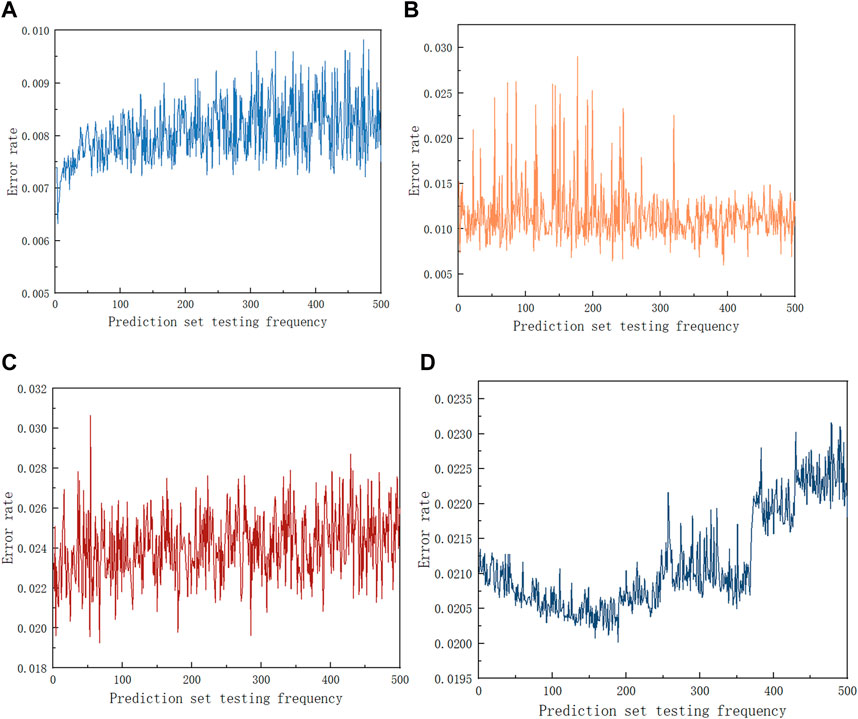
Figure 6. Model error comparison plot. (A) Error rate of RNN. (B) Error rate of ADP. (C) Error rate of LSTM. (D) Error rate of BiGRU.
Figure 7 shows the comparison between the number of remaining operating days of the equipment predicted by each algorithm and the number of remaining operating days of the actual equipment after selecting 1–16 partial discharges generated, and it is easy to see that the error of BiGRU is the smallest among the three mainstream methods, but the error of the ADP algorithm proposed in this paper is smaller than that of the BiGRU algorithm, which proves the superiority of the ADP algorithm proposed in this paper in the prediction of the life of the switchgear cabinet. This can prove the superiority of the ADP algorithm proposed in this paper in the life prediction of switchgear.
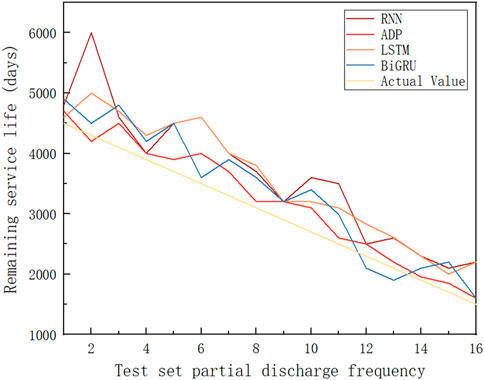
Figure 7. Predictive sampling comparison chart.
The prediction accuracy and evaluation indexes of RNN, BiGRU and ADP before and after feature selection are given in Table 1. In this paper, using NCA and Spearman’s rank correlation coefficient, the seven feature parameters extracted from the experimental data are excluded from the two feature parameters, and the optimal feature subset composed of five feature parameters is obtained. It can be found that using the optimal feature subset selected after the analysis in this paper as the input to the prediction model has a higher accuracy. Meanwhile, the accuracy of LSTM and ADP is similar and better than RNN, but the computation time of BiGRU under the same platform is 81.44 s, and the computation time of ADP is 73.44 s, which can be seen that the computation time of ADP is less due to the fact that the ADP prediction model is more simplified compared with BiGRU. Therefore, in this paper, all the subsequent model comparisons are improved on the basis of ADP.
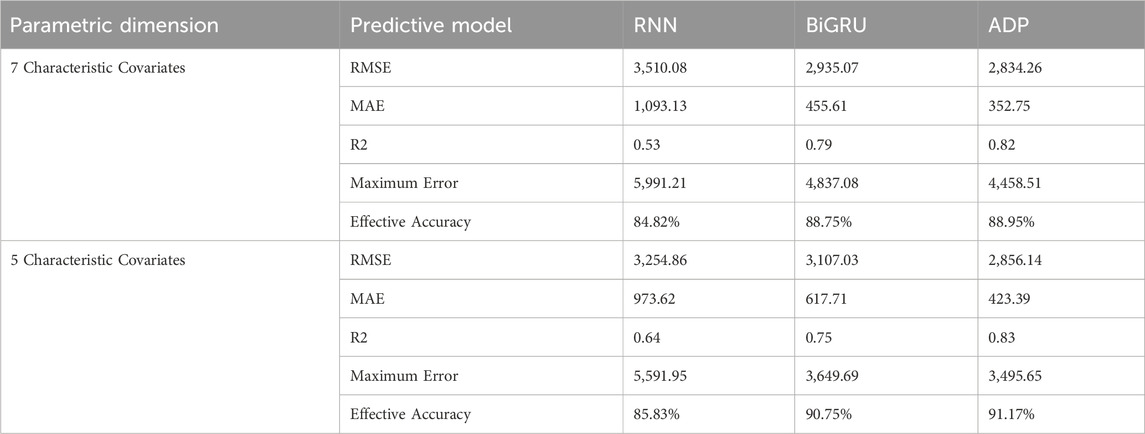
Table 1. Comparison table of RNN、LSTM and ADP prediction results before and after feature selection.
5 Discussion
In this paper, using the data-driven idea with the Spearman rank correlation coefficient, the seven feature coefficients extracted from the experimental data are eliminated from the two feature coefficients, and the optimal feature subset consisting of five feature coefficients is obtained. It can be found that using the optimal feature subset selected after the analysis in this paper as the input of the prediction model has a higher accuracy. At the same time, the computation time for the life prediction of environmentally friendly gas switchgear based on the approximate dynamic programming algorithm is 73.44 s, which is less compared with the traditional time computation time.
In this paper, the prediction results of the test set are randomly selected partly for comparison, and the comparison results are shown in Figure 5. It can be clearly compared that the results predicted in this paper are closest to the actual values, with obvious advantages. In the next study, the residual electric life prediction model of the environmentally friendly gas switchgear can be further improved by combining artificial intelligence technology and using deep reinforcement learning algorithms to improve its accuracy and robustness.
The ADP algorithm proposed in this paper converts a long time large-scale computation into a small-scale computation that can be iterated many times, thus reducing the amount of computation and accelerating the speed of computation. Therefore, in practical applications, the ADP algorithm proposed in this paper has superior scalability and practical application value due to its fast calculation speed and high prediction accuracy.
6 Conclusion
In this paper, a method for electrical life prediction of environmentally friendly gas switchgear based on approximate dynamic programming is proposed. The most featured subset for life prediction of environmentally friendly gas switchgear is selected by using data enhancement technique and SDAE method, the optimal featured subset is strengthened by data enhancement, and the switchgear electrical life prediction is carried out by using an approximate dynamic programming algorithm and is compared with RNN, LSTM and BiGRU, and in the case analysis, the results of the case analysis prove that the method proposed in this paper has superior accuracy and computational speed in the life prediction of environmentally friendly gas switchgear, which is scalable and practicable.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author contributions
ZZ: Conceptualization, Data curation, Investigation, Methodology, Writing–original draft, Writing–review and editing. YY: Investigation, Methodology, Writing–review and editing. LX: Conceptualization, Methodology, Supervision, Writing–review and editing. BT: Conceptualization, Software, Writing–review and editing. LH: Conceptualization, Software, Writing–review and editing. HZ: Formal Analysis, Validation, Writing–review and editing. PZ: Formal Analysis, Validation, Writing–review and editing. SS: Data curation, Resources, Writing–review and editing. JF: Project administration, Resources, Writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This research was funded by the Science and Technology Project of Hebei Electric Power Company of State Grid (SGHEXA00GDJS2250285).
Conflict of interest
Authors ZZ, LX, BT, HZ, PZ, SS, JF were employed by State Grid Xiongan New Area Electric Power Supply Company. Author YY was employed by State Grid Fuzhou Electric Power Supply Company.
The remaining author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The authors declare that this study received funding from the Science and Technology Project of Hebei Electric Power Company of State Grid. The funder had the following involvement in the study: study design, data collection and analysis, decision to publish, or preparation of the manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Anand, R., Swaroop, D., and Kumar, B. (2020). “Global maximum power point tracking for PV array under partial shading using cuckoo search,” in 2020 IEEE 9th power India international conference (PIICON), Sonepat, 28 February 2020–01 March 2020, 1–6.
Baharani, M., Biglarbegian, M., Parkhideh, B., and Tabkhi, H. (2019). Real-time deep learning at the edge for scalable reliability modeling of Si-MOSFET power electronics converters. IEEE Internet Things J. 6, 7375–7385. doi:10.1109/JIOT.2019.2896174
Ceccarelli, L., Kotecha, R. M., Bahman, A. S., Iannuzzo, F., and Mantooth, H. A. (2019). Mission-profile-based lifetime prediction for a SiC mosfet power module using a multi-step condition-mapping simulation strategy. IEEE Trans. Power Electron. 34 (10), 9698–9708. doi:10.1109/TPEL.2019.2893636
Celaya, J., Saxena, A., Saha, S., and Goebel, K. F. (2011). “Prognostics of power mosfets under thermal stress accelerated aging using data-driven and model-based methodologies,” in Annual conference of the prognostics and health management society, Spokane, WA, June 17–19, 2024, 443–452.
Chen, D., Zhang, W., Zhang, C., Sun, B., Cong, X., Wei, S., et al. (2022). A novel deep learning-based life prediction method for lithium-ion batteries with strong generalization capability under multiple cycle profiles. Appl. Energy 327, 120114–122619. doi:10.1016/j.apenergy.2022.120114
Dusmez, S., Duran, H., and Akin, B. (2016). Remaining useful lifetime estimation for thermally stressed power MOSFETs based on on-state resistance variation. IEEE Trans. Industry Appl. 52, 2554–2563. doi:10.1109/TIA.2016.2518127
Ender, J., Orio, R. L., Fiorentini, S., Selberherr, S., Goes, W., and Sverdlov, V. (2021). Improving failure rates in pulsed SOT-MRAM switching by reinforcement learning. Microelectron. Reliab. 126, 0026–2714. doi:10.1016/j.microrel.2021.114231
Fan, X., Li, S., and Liu, R. (2023). ADP-based optimal control for systems with mismatched disturbances: a PMSM application. IEEE Trans. Circuits Syst. II Express Briefs 70 (6), 2057–2061. doi:10.1109/TCSII.2022.3233356
Fu, S. Y., Tseng, Y. C., and Chiang, K. N. (2020). “Study on data effect of using RNN model to predict reliability life of wafer level packaging,” in 2020 15th international microsystems, packaging, assembly and circuits technology conference (IMPACT), Taipei, 21–23 October 2020, 200–203.
Gang, C., Li, C., and Sun, J. (2024). Research progress on deep learning-based equipment remaining life interval prediction. J. Eng. Sci. 46 (04), 723–734. doi:10.13374/j.issn2095-9389.2023.06.19.003
Kumar, N., and Panda, S. K. (2023a). A multipurpose and power quality improved electric vessels charging station for the seaports. IEEE Trans. Industrial Inf. 19 (3), 3254–3261. doi:10.1109/TII.2022.3170424
Kumar, N., and Panda, S. K. (2023b). Smart high power charging networks and optimal control mechanism for electric ships. IEEE Trans. Industrial Inf. 19 (2), 1476–1483. doi:10.1109/TII.2022.3170484
Kumar, N., Singh, B., and Panigrahi, B. K. (2023). Voltage sensorless based model predictive control with battery management system: for solar PV powered on-board EV charging. IEEE Trans. Transp. Electrification 9 (2), 2583–2592. doi:10.1109/TTE.2022.3213253
Li, J., Nagamune, R., Zhang, Y., and Li, S. E. (2023). Robust approximate dynamic programming for nonlinear systems with both model error and external disturbance. IEEE Trans. Neural Netw. Learn. Syst. 1, 1–15. doi:10.1109/TNNLS.2023.3335138
Li, W., Wang, B., Liu, J., Zhang, G., and Wang, J. (2020). IGBT aging monitoring and remaining lifetime prediction based on long short-term memory (LSTM) networks. Microelectron. Reliab. 114, 113902–122714. doi:10.1016/j.microrel.2020.113902
Li, Z., Wu, L., Xu, Y., Moazeni, , and Tang, Z. (2022). Multi-stage real-time operation of a multi-energy microgrid with electrical and thermal energy storage assets: a data-driven MPC-ADP approach. IEEE Trans. Smart Grid 13 (1), 213–226. doi:10.1109/TSG.2021.3119972
Ma, L., Huang, J., Chai, X., and He, S. (2023). “Life prediction for IGBT based on improved long short-term memory network,” in 2023 IEEE 18th conference on industrial electronics and applications (ICIEA), Ningbo, 18–22 August 2023, 868–873.
Mei, W., Liu, Z., and Su, Y. (2021). “MRPM: multistep robust prediction machine for degradation time series projection,” in 2021 IEEE international instrumentation and measurement technology conference (I2MTC), Glasgow, 17–20 May 2021, 1–7.
Omid, Z., and Javad, P. (2023). Voltage control of DC–DC converters through direct control of power switches using reinforcement learning. Eng. Appl. Artif. Intell. 120, 0952–1976. doi:10.1016/j.engappai.2023.105833
Panarello, S., Garescì, F., Triolo, C., Patanè, S., Patti, D., and Russo, S. (2016). “Reliability model application for power devices using mechanical strain real time mapping,” in 2016 28th international symposium on power semiconductor devices and ICs (ISPSD), Prague, 12–16 June 2016, 127–130.
Saha, J., Kumar, N., and Panda, S. K. (2023). A futuristic silicon-carbide (SiC)-based electric-vehicle fast charging/discharging (FC/dC) station. IEEE J. Emerg. Sel. Top. Power Electron. 11 (03), 2904–2917. doi:10.1109/JESTPE.2022.3223417
Shen, Y., Liivik, E., Blaabjerg, F., Vinnikov, D., Wang, H., and Chub, A. (2018). “Reliability evaluation of an impedance-source PV microconverter,” in 2018 IEEE applied power electronics conference and exposition (APEC), San Antonio, TX, 04–08 March 2018, 1104–1108.
Yousaf, M., Muttaqi, K. M., and Sutanto, D. (2022). Improvement of transient stability of the power networks by an intelligent autoreclosing scheme in the presence of synchronous-based DGs. IEEE Trans. Industry Appl. 58 (2), 1783–1796. doi:10.1109/TIA.2022.3145754
Zhang, Y., He, Z., Mao, Y., Yi, C., and Le, M. (2023). “Bearing remaining useful life prediction based on TCN-transformer model,” in 2023 CAA symposium on fault detection, supervision and safety for technical processes (SAFEPROCESS), Yibin, 22–24 September 2023, 1–6.
Zhu, J., Li, G., Guo, Y., Chen, J., Liu, H., Luo, Y., et al. (2024). Real-time risk-averse dispatch of an integrated electricity and natural gas system via conditional value-at-risk-based lookup-table approximate dynamic programming. Prot. Control Mod. Power Syst. 9 (2), 47–60. doi:10.23919/PCMP.2023.000247
Keywords: data-driven, environmental gas switch cabinet, approximate dynamic programming, life prediction, data enhancement technology
Citation: Zhang Z, Ye Y, Xue L, Tang B, He L, Zhao H, Zhang P, Sun S and Fan J (2024) Research on the remaining life prediction technology of environmentally friendly gas switchgear based on approximate dynamic programming. Front. Energy Res. 12:1431098. doi: 10.3389/fenrg.2024.1431098
Received: 11 May 2024; Accepted: 01 July 2024;
Published: 25 July 2024.
Edited by:
Shuai Yao, Cardiff University, United KingdomReviewed by:
Fabio Corti, University of Florence, ItalyNishant Kumar, Indian Institute of Technology, Jodhpur, India
Copyright © 2024 Zhang, Ye, Xue, Tang, He, Zhao, Zhang, Sun and Fan. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Ziyu Zhang, bGVvcmFiYml0bGVvQG91dGxvb2suY29t