 Zongyao Wang
Zongyao Wang Gaoyang Yan
Gaoyang Yan Yi Rong
Yi Rong Han Wang
Han Wang- Department of Electrical Engineering, Nanchang Institute of Technology, Nanchang, China
With the improvement in power grid simulation accuracy requirements, the existing typical load model parameters can no longer meet the accuracy requirements and become the short board that restricts the stable operation of power system. This paper mainly proposes an improved butterfly optimization algorithm based on the population optimization and dynamic strategy (PODSBOA) for commonly used synthesis load model (SLM) parameters to realize the refined and personalized identification of SLM key parameters:[
1 Introduction
The planning, designing, scheduling, and operation decisions of the power system are based on the theoretical support of power system simulation calculation, which is based on the load model of the power system. The accuracy of calculation is closely related to the accuracy of load model parameters. Due to the complex and scattered characteristics of the load, the mathematical model used for the load part in the simulation calculation and analysis of large-scale power systems at this stage is usually based on versatility rather than accuracy. The simulation results obtained by using these rough load models cannot meet the accuracy requirements and the requirements for guiding power system dispatching, operation, and decision-making in the current complex grid environment. In order to ensure the stable operation of the power system, we propose higher requirements for the accuracy of the simulation analysis and calculation of the power system. The load model cannot continue to use typical parameters but needs to establish a new load model for the load nodes through the identification of actual measured data with the short-term and long-term changes in the load (El-Shimy et al., 2018; Kosterev et al., 1999).
At this stage, modeling by identification is gradually becoming the mainstream modeling method, but there are still some problems in obtaining accurate load model parameters through identification (Ma et al., 2008). Power system simulation analysis and decision-making pay more attention to the overall characteristics of load clusters. However, due to the complexity of load characteristics in the actual power grid and the huge differences between different nodes, it is difficult for the load model to accurately describe the overall load characteristics and have good generalization ability in different operating environments in practical applications. It is mainly reflected in two aspects: load data and identification parameters. Specifically, there are few measured data and many parameters to be identified in the synthesis load model (SLM), which is prone to the dispersion problem of unstable identification results and limits the accuracy of model parameter identification. Identifying the load model parameters under less known conditions will cause the problem of the model parameters being unable to be uniquely identified or unidentifiable, and when there are too many identified parameters, the model parameter identification results will have dispersion problems (Zad et al., 2017).
In recent years, the research focus in the field of load modeling has gradually developed with regard to the use of multi-source data and the establishment of generalized synthesis load models for wide-area load modeling problems (Zhao et al., 2020; Ju et al., 2007). At this stage, better results have been achieved in terms of positive deterministic model structure and accurate quantitative model parameters through new techniques and multiple methods (Zhou et al., 2018). Based on the SLM structure, the strategy of identifying only part of the parameters has become one of the most important research directions; setting the parameters with low sensitivity or unimportant parameters as typical parameter values can effectively improve the identification speed (Wang and Han, 2010; Yuan et al., 2021). An effective reconfiguration framework can minimize the distribution loss while the energy demand and load change (Mahdavi et al., 2021). An isolated microgrid dynamic economic load-dispatching method based on particle swarm optimization (PSO) algorithms is studied (Jordehi et al., 2020). Bu et al. (2020) proposed a method combining deep learning to adjust parameter weights to efficiently identify parameters. Simulation evolution methods can be used to solve the problem of load model-parameter identification. Intelligent optimization algorithms in simulation evolution methods are increasingly used in model-parameter identification. The introduction of intelligent optimization algorithms such as particle swarm algorithm, genetic algorithm, and butterfly algorithm into the field of power system-load model-parameter identification results in a notable performance (Bai and Jing 2015; Chen et al., 2022; Kang et al., 2021). However, the intelligent optimization algorithm has problems such as insufficient optimization efficiency and easily falls into local optimality. Therefore, how to improve the algorithm is the key to improving the parameter-identification effect of the synthesis load model. In this novel research, swarm intelligence algorithms such as the improved firefly algorithm (Zivkovic et al., 2022; Bacanin et al., 2021) have successfully combined machine learning and been applied to scenarios such as hyperparameter optimization and feature selection. They yield excellent results and show significant potential. They yield excellent results and show significant potential.
In a word, the difficulty of obtaining load identification data and the inherent structure and parameter limitations of the load model make parameter identification very complicated. The problems of the parameters being unable to be uniquely identified or even unidentifiable and the dispersion of identification results need to be solved urgently (Cheng and Ju 2003). In order to obtain more accurate model parameters and improve the practicability of the load model in the actual power grid, based on the overall measurement method and the related technology of identification modeling using the intelligent optimization algorithm, it is necessary to further carry out more specific research on the identification strategy and the model-parameter identification algorithm of the load model to improve the accuracy and stability of the model-parameter identification results and obtain a more accurate load model to improve the accuracy of the power system simulation calculation. In summary, for solving the problems of low accuracy and instability in parameter identification, it is necessary to carry out further research on the identification strategy of load models and model parameter identification algorithms.
Existing parameter identification schemes have problems such as insufficient identification accuracy and instability caused by scattered identification results. This paper solves the above problems. The main contributions are as follows:
(1) The butterfly optimization algorithm (BOA) is improved based on the population optimization strategy and adaptive dynamic parameter strategy. The search performance of the algorithm is optimized; it has higher convergence accuracy and speed than other algorithms.
(2) An identification scheme for key parameters of the SLM is proposed based on the importance of parameters, which improves the stability and accuracy of the identification scheme.
The paper is organized as follows: Section 1 introduces and reviews the research results related to the load model parameter identification of the power system; Section 2 introduces the structure of the traditional SLM and its parameter identification method; then introduces the theoretical principle, optimization strategy, and calculation process of the improved butterfly algorithm; and finally presents the overall process of SLM parameter identification using the proposed improved butterfly algorithm; Section 3 verifies the recognition accuracy, recognition error, and convergence time of the SLM parameter recognition based on practical cases, which confirms the superiority of the method. The proposed identification scheme sets the parameters that are insensitive to the output as typical parameters, which reduces the parameters to be identified, improves the identification accuracy of the model, and solves the problem of result dispersion that is prone to occur in the process of identifying all parameters. The improved butterfly algorithm has a superior effect on the parameter identification of the SLM. It solves the problems of complexity and low accuracy of parameter identification caused by the acquisition of current load identification data and the limitation of the load model structure and parameters.
2 Materials and methods
2.1 Synthesis load model identification
In the actual grid structure, the load is indirectly connected to the substation outlet busbar through the distribution network formed by 110-kV and 35-kV transformers and transmission lines. The load model needs to consider the influence of the impedance in the distribution network at all levels. In order to make the model load characteristics closer to the requirements of the actual grid and to the premise of “qualitative accuracy” of the model structure, the SLM, which directly considers the influence of distribution network impedance, is proposed (Ju et al., 2010; Tang et al., 2009). In the SLM, the actual injected power at the 110-kV node flows into the lower load through the distribution network equivalent impedance, which truly reflects the influence of the impedance in the distribution network.
The SLM consists of six parts in total, as shown in Figure 1, namely, the 110-kV busbar connected to the load model, the distribution network equivalent impedance, the virtual busbar connected to all loads, the static load section (ZIP), the dynamic load section (motor), and the reactive power compensation device (reactive power compensation in the form of capacitors in the model). The equivalent circuit of the synthesis load section in the SLM is shown in Figure 2, where the equivalent circuit port voltage is equal to the virtual busbar voltage
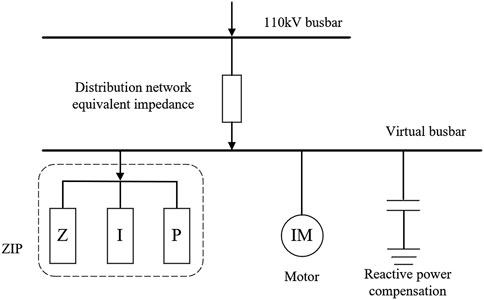
Figure 1. Structure diagram of the SLM.

Figure 2. Equivalent circuit diagram of the synthesis load model.
The third-order induction motor state equation describing the dynamic load of the SLM is shown in Equation 1:
The relevant parameters are defined in Equation 2:
Among them, the electromagnetic torque coefficient and mechanical torque parameters are shown in Equations 3, 4:
Among them,
There are 17 parameters in the SLM, without considering the effect of frequency, which are divided into static parameters, motor parameters, distribution network impedance, and dynamic and static proportional parameters, as follows:[
For the complex structure of the SLM, the identification scheme that only relies on the measured voltage and power to identify all parameters will lead to the parameters not being uniquely identified, and thus it is necessary to change the identification scheme and select important parameters for identification.
By setting the insensitive parameter values as typical parameters and identifying only the remaining part of important parameters, the set of key parameters to be identified in the SLM is revealed to be [

Table 1. Typical values of non-key parameters.
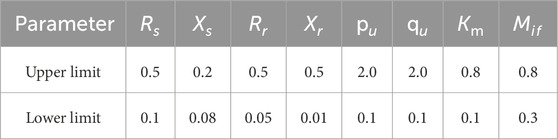
Table 2. Identification interval range of key parameters.
2.2 Improved butterfly algorithm
2.2.1 Basic butterfly algorithm flow
The butterfly optimization algorithm is a simulated evolutionary class of intelligent optimization algorithms that searches by imitating a butterfly’s foraging behavior of finding the most scented individual and moves toward the optimal individual for location update by imitating the butterfly’s mating behavior (Arora and Singh 2019). The butterfly location-update mechanism is as follows: when a butterfly receives information from a higher-scented butterfly, it moves toward the higher-scented butterfly for global search; when a butterfly does not perceive that there is a higher-scented butterfly, it moves randomly in the current range for local search.
The scent intensity of butterfly f is characterized by three parameters: power function exponential term
The global update and local update of individual butterfly positions are shown in Equations 6, 7.
Iterative population individual global position update:
and iterative population individual local position update:
where
2.2.2 Improved butterfly algorithm based on the population optimization and dynamic strategy
2.2.2.1 Population optimization
The convergence speed and accuracy of the butterfly algorithm are sensitive to the initial state. The initial population established by the pseudo-random number generator (PRNG) is usually not uniformly distributed in the high-dimensional space. The initial population optimization is achieved by using symmetric population amplification to increase the coverage area of the search space and retain the dominant population through the elite retention strategy. First, the initial population is established based on the pseudo-random number generator, and the population spatial distribution center is calculated. Then, the symmetric population is obtained through Equation 8 to achieve symmetric amplification of the population. The process of symmetric population amplification is shown in Figure 3. The black points are the initial population established by the pseudo-random number generator, the blue points are the symmetric population obtained by Equation 8, and the red point is the spatial center of the population distribution.
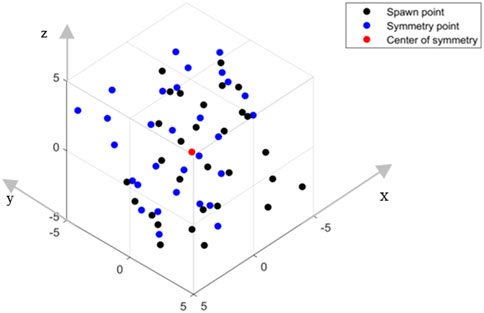
Figure 3. Schematic diagram of population symmetric amplification.
Population symmetric amplification:
where
When the current iteration ends, before starting the next iteration, two butterflies with the worst fitness in the current iteration population are processed for crossover variation (the number of butterflies in the population is 30; the reason for selecting 2 is because the selection of too many butterflies affects the convergence path of the algorithm, and it is more appropriate to select the number of individuals at approximately 1/10). Crossover processing is used for butterfly whose random generation number is less than the crossover probability
2.2.2.2 Dynamic strategy
The values of sensory modality
The size of the switching probability
Combined with the demand for different search modes in different periods of the algorithm to improve the convergence speed and convergence accuracy, the dynamic change curves of sensory modality
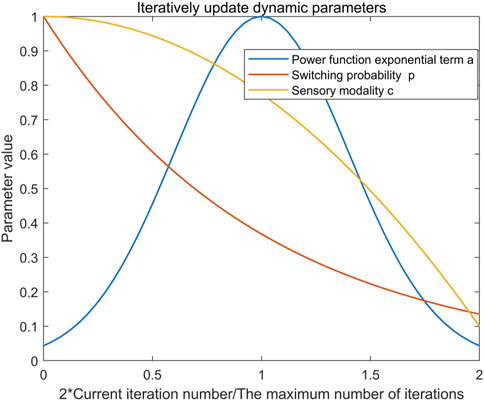
Figure 4. Algorithm search parameter dynamic adaptive trend.
Sensory modality
Power exponent
The switching probability
where
In order to meet the location update requirements of the algorithm to increase the global location update breadth in the early stage and the random search depth of the local location range in the later stage, the location update strategy for increasing the dynamic weight operator is constructed, and the overall trend of the dynamic update weight operator of the location is shown in Figure 5.
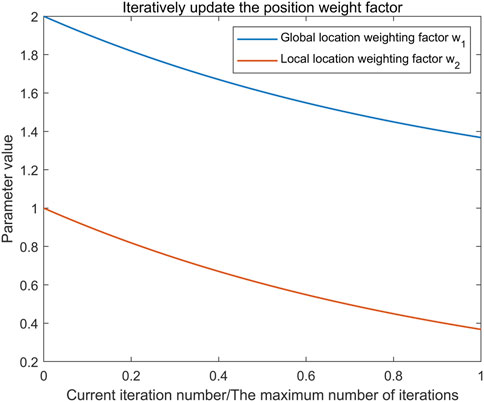
Figure 5. Dynamic trend of the location update weighting factor.
Global position update operator
Local position update operator
Global position update after the introduction of the weight operator as shown in Equation 14:
Local position update after the introduction of the weight operator as shown in Equation 15:
2.2.2.3 Algorithm flow
The initial population is optimized, and the disadvantaged population and other population optimization strategies are improved, combined with adaptive dynamic search parameters and a variable weight position update factor strategy to optimize the butterfly algorithm. The advantages of the two optimization strategies are combined to form a PODSBOA based on the population optimization and dynamic parameter strategy, and the complete flow of the algorithm is shown in Figure 6.
Step 1: The butterfly algorithm search parameters are initialized, the number of butterfly populations is set to
Step 2: The initial butterfly population of size
Step 3: Fitness calculation—the fitness of butterflies in the expanded population is calculated according to the fitness criterion function.
Step 4: Population recovery—
Step 5: Disadvantaged population update—the two butterfly with the worst fitness are selected, and crossover and mutation operations are performed on them.
Step 6: Dynamic update of algorithm parameters—sensory modality
Step 7: The current fragrance of each butterfly is calculated according to the updated parameters.
Step 8: Iterative optimization search—a random number between 0 and 1 is generated, denoted as rand. If the switching probability
Step 9: The global optimal value is calculated after individual updates.
Step 10: Out-of-bounds check—it is checked whether the updated individual is out of bounds, and the position of the new individual that is out of bounds is corrected.
Step 11: It is determined whether the current end condition of the iteration of the algorithm is satisfied. If the end condition is not satisfied, the algorithm turns to step 5 to continue the execution; conversely, the current optimal result is output, and the algorithm ends.

Figure 6. Flowchart of the PODSBOA.
3 Results
3.1 Synthesis load model identification process
3.1.1 Identification scheme
3.1.1.1 Identification criteria
The data used in the identification process are in the case of self-disturbance, including the data collected in the whole process of the load node before the disturbance, the disturbance process, and the gradual recovery to the steady state after the disturbance. The data type is the dynamic operation data of voltage and power.
The identification criterion is to find the parameter group that can make the synthesis power response of the power function model and the motor model closest to the disturbance sampling data under the same voltage input. The parameter group that can achieve the optimal response is the parameter identification result. The dynamic model parameter identification criteria of the SLM are shown in Figure 7.
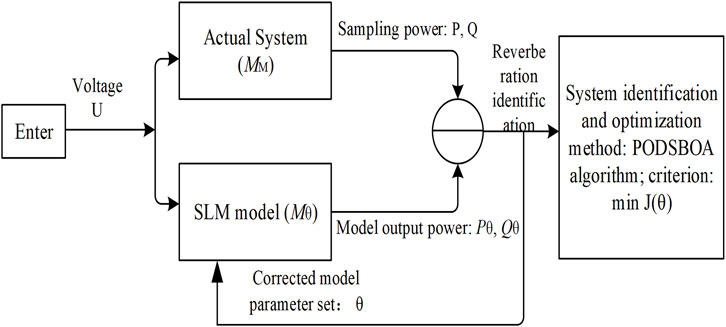
Figure 7. Dynamic model parameter identification criteria of the SLM.
3.1.1.2 Objective function
According to the output relationship of the SLM, it is known that according to the power composition of the model, the total load power is characterized by static load power
where
3.1.1.3 Identification process
First, the motor parameters and voltage power data are input, and then the slip and transient potential are initialized according to the known parameters such as static model parameters, motor model parameters, dynamic and static load ratio, and motor load rate. Finally, the terminal current, terminal power, and total active and reactive power output of the model are solved. Based on the power response identification criterion, the minimum synthesis power response error of the model is taken as the goal, the parameter group to be identified is continuously modified by the PODSBOA, and the final identification result is output.
The dynamic load model adopts the SLM structure of motor load in parallel with static load, and the SLM parameters are identified by an intelligent optimization algorithm, in which the SLM identification process using the optimization algorithm is shown in Figure 8.
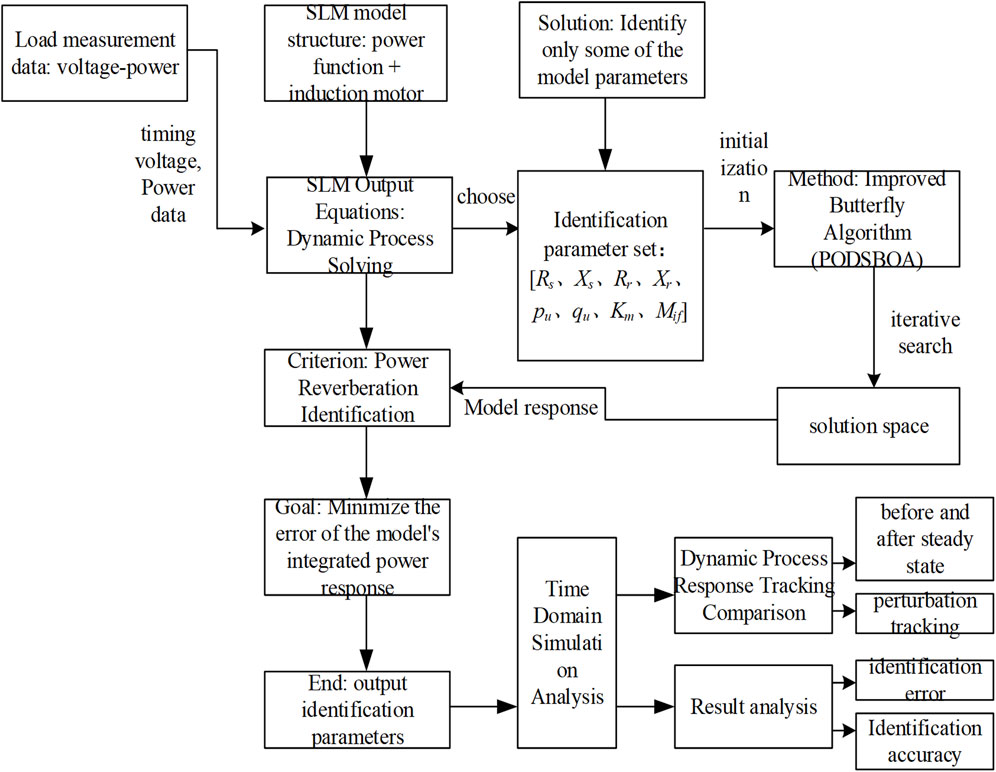
Figure 8. SLM dynamic model parameter identification scheme.
3.1.2 Dynamic model parameter identification process using the PODSBOA
The PODSBOA is used to complete the identification of the dynamic model parameters, and the specific steps of the PODSBOA for dynamic model parameter identification are shown in Figure 9. The insensitive parameters are set as typical parameters values, and only the important parameters of the remaining part are identified. The set of key parameters to be identified for the SLM is [
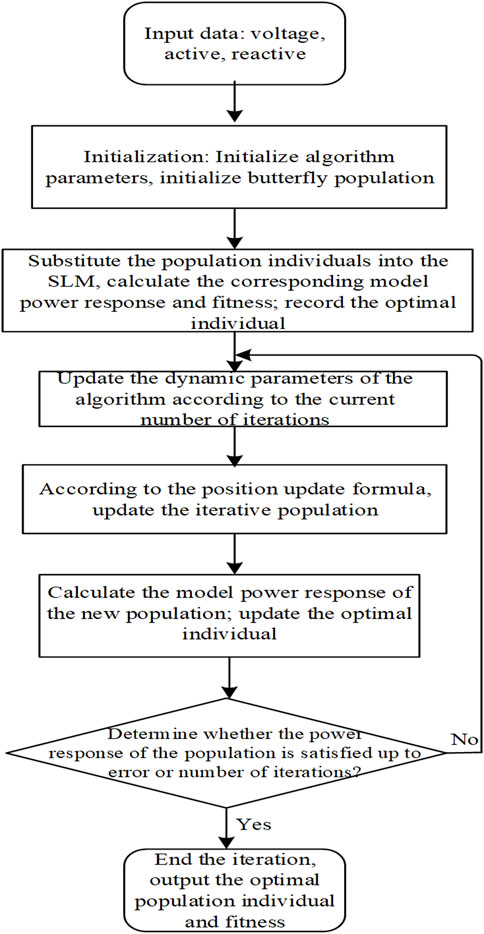
Figure 9. Process of identifying the parameters of the dynamic model by the PODSBOA.
3.2 Result verification and performance comparison
3.2.1 Identification data source
Dynamic model parameter identification uses the dynamic load characteristic data shown in Figure 10; a single-phase short-circuit fault occurs at 1.12 s, the data sampling time interval is 0.01 s, and the voltage starts to decrease when the fault occurs at 1.12 s and starts to recover at 1.20 s. The collected data types include voltage and active power, reactive power, and fault recording data lasting 5 s in total.
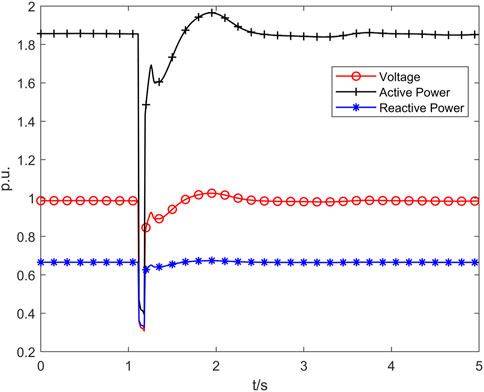
Figure 10. Sampling data of the disturbance fault recorder.
The simulation environment of the algorithm test experiment is as follows: the computer operating system is Windows 10, and the CPU is Intel@Core TM i5-6200U. The main frequency of the system is 2.30 GHz, the memory is 8.0 GB, and the simulation software version is MATLAB 2019a. The basic parameters of the five algorithms PODSBOA, BOA, modified whale optimization algorithm (MWOA) (Zhang and Chen 2018), gray wolf optimizer (GWO), and sand cat swarm optimization (SCSO) are the same. The population number is set to 30, and the maximum number of iterations is 500. The key parameters of the five algorithms PODSBOA, BOA, MWOA, GWO, and SCSO are set as shown in Table 3.
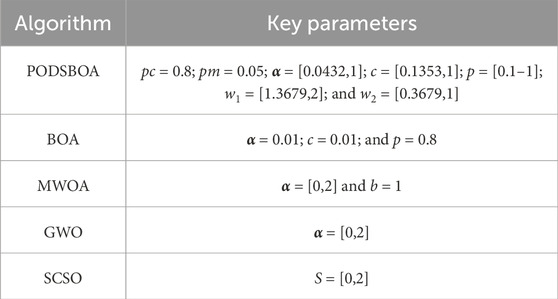
Table 3. Key parameters of each algorithm.
In the PODSBOA, the power exponent
3.2.2 Identification process and results
The complete disturbance data lasting 5-s and the disturbance data from 0.5 s to 2.5-s are selected separately as the identification data for the iterative identification and optimization of the model parameters, as shown in Figures 10, 11. In the 2-s disturbance data recognition experiment, the data proportion of the steady-state process before disturbance and the process of recovery to the steady-state after the disturbance are reduced, and the data proportion of the disturbance process is increased, focusing on the tracking ability of the load model for the changes of the load characteristics during the disturbance.
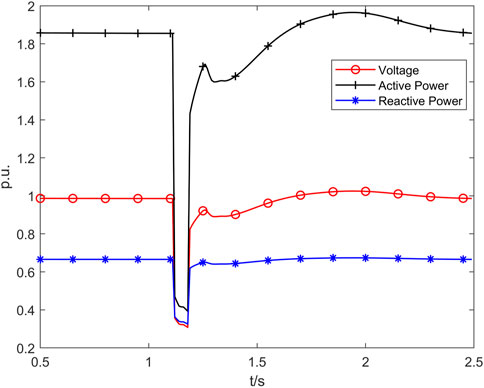
Figure 11. Fault disturbance sampling data (0.5 s–2.5 s).
The PODSBOA, BOA, MWOA, GWO, and SCSO are used to identify the model parameters, and the identification results are shown in Tables 4, 5. The error is the single-point average absolute error of the synthesis power response of the model. In the experiment where disturbance data from 0.5 s to 2.5-s is selected as the identification data are shown in Figure 12A; the power response of SLM parameter identification is shown in Figures 12B, C, the iterative convergence process of the five algorithms is shown in Figure 12D, and the box and whisker plot diagrams of identification errors of each algorithm are shown in Figure 13. In the experiment of all 5-s disturbance data, the solution of the transient potential of the dynamically changing motor and the calculation results of the machine end current are shown in Figure 14A; the power response of SLM parameter identification is shown in Figures 14B, C, the iterative convergence process of the five algorithms is shown in Figure 14D, and the box and whisker plot diagrams of identification errors of each algorithm are shown in Figure 15. In order to prove the significance of the algorithms’ identification results, the Wilcoxon signed ranks test was performed on each algorithm, and the p-value results are shown in Table 5 (0.5 s–2.5 s) and Table 7 (0 s–5 s).
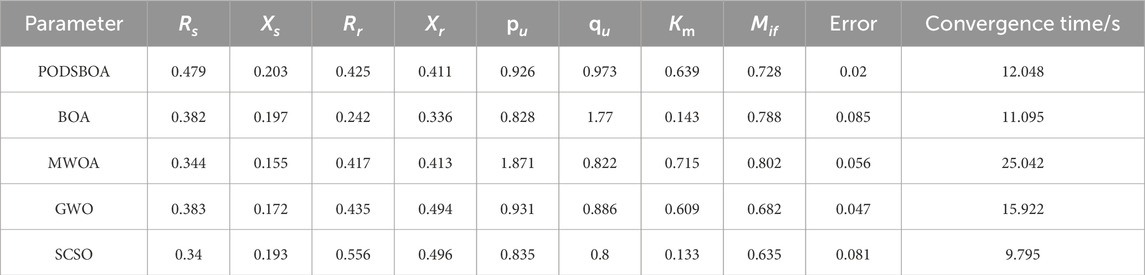
Table 4. Parameter identification results of the dynamic load model (0.5 s–2.5 s).

Table 5. p-value of the Wilcoxon signed rank test between each algorithm and the PODSBOA.
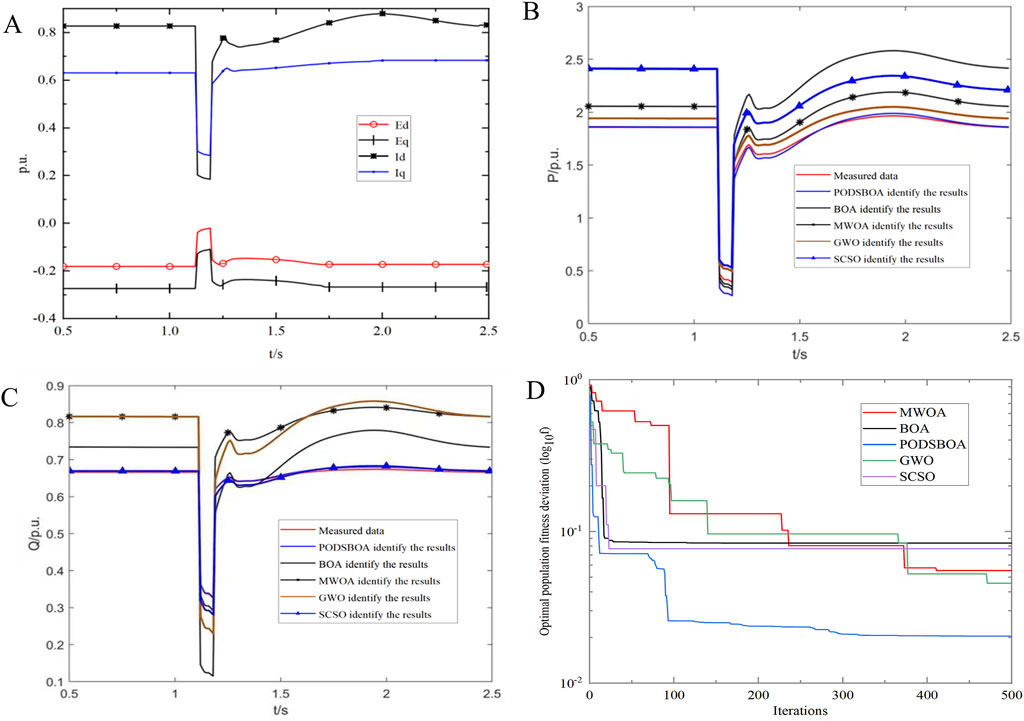
Figure 12. (A) Main process variables of motor model identification and calculation. (B) Active power response of SLM identification. (C) Reactive power response of SLM identification. (D) Iterative convergence curve (comparison of five algorithms).
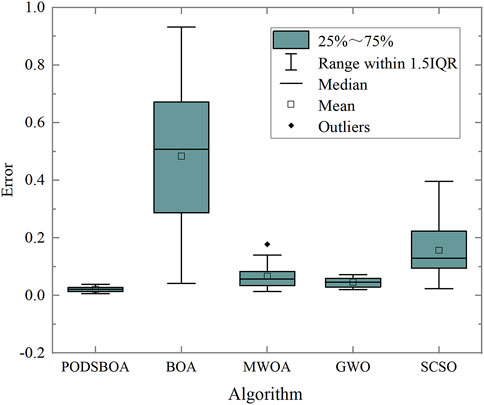
Figure 13. Box and whisker plot diagrams of identification errors of each algorithm (0.5 s–2.5 s).
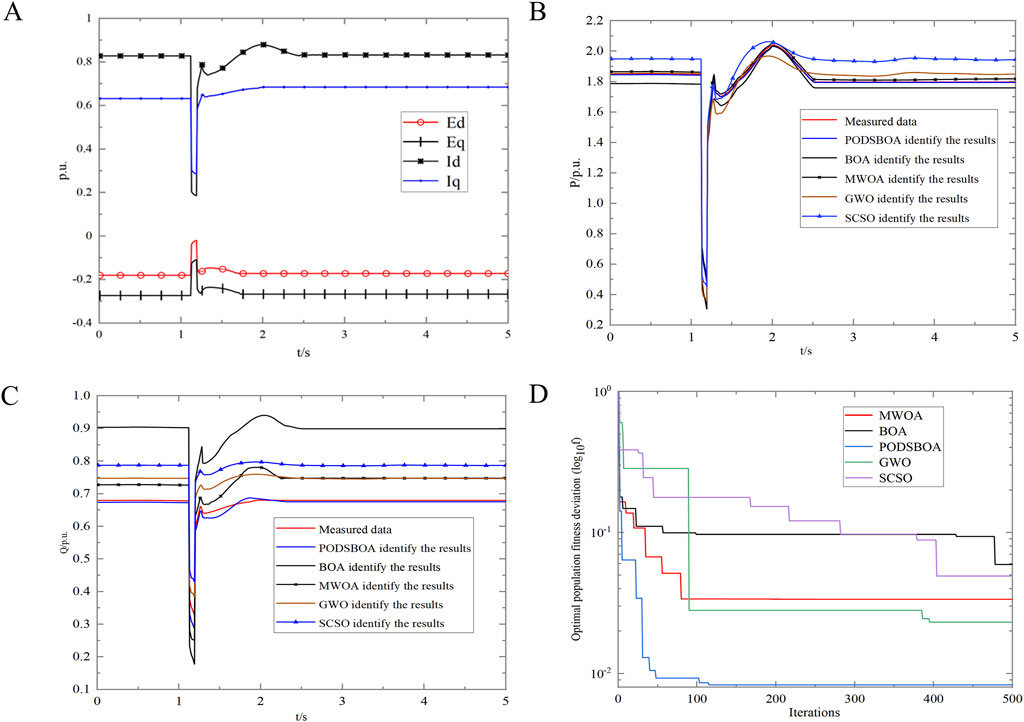
Figure 14. (A) Main process variables of motor model identification and calculation. (B) Active power response of SLM identification. (C) Reactive power response of SLM identification. (D) Iterative convergence curve (comparison of five algorithms).
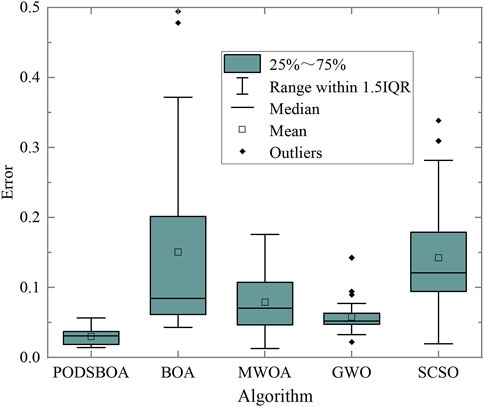
Figure 15. Box and whisker plot diagrams of identification errors of each algorithm (0 s–5 s).
3.2.3 Analysis of the results
Based on the 2-s duration load data and 5-s duration load data for model parameter identification, by analyzing the results obtained by identifying load model parameters using the five algorithms, it can be concluded that
(1) According to Figures 12, 14D, by comparing the convergence curves, it can be found that the SLM identification results obtained based on the PODSBOA have the highest convergence accuracy compared to those obtained using the BOA, MWOA, GWO, and SCSO, and the model identification error based on the 2-s duration data is 0.02017, and the identification accuracy is 4.09, which is better than 4.6215 obtained using the mutational PSO with S-curve inertia weight (S-MPSO) (Shen 2013), Similarly, the model identification error based on the 5-s duration data is 0.01337, and the identification accuracy is 6.65, which is better than 6.6842 obtained using the S-MPSO, which illustrates the excellent effect of the PODSBOA proposed in this paper for load model parameter identification, and the dynamic model parameter identification scheme based on the PODSBOA to identify the key parameters of SLM: [
(2) According to Figures 12B, C, based on the power response of the model, the power response of the SLM identification model of the PODSBOA starts to decrease at 1.12 s, lasts 0.08 s, and then starts to recover and gradually returns to smooth operation from 1.2 to 2.0 s, which is consistent with the actual fault recording data situation and can accurately reflect the real level of the actual load, and realizes the fine identification of load model parameters, and from the box and whisker plot diagrams of identification errors of each algorithm in Figures 13, 15, it can be seen that the PODSBOA has the best robustness in the identification process of 2 and 5 s sampling data.
(3) Tables 4, 6 show that in the 2-s load data experiment, the convergence time of the PODSBOA is 12.048 s, which is lesser than that of MWOA and GWO and slightly larger than that of BOA and SCSO. The same is true in the experiment of 5 s load data, which is determined by the increased computational effort of the improved algorithm itself, and illustrates that the improved butterfly algorithm ensures faster convergence speed. Tables 5, 7 list the p-values of the PODSBOA and other algorithms at the 5% significance level. When p is less than 5%, it indicates that there is a significant difference between the two comparison algorithms, and when p is greater than 5%, it means that the difference between the two algorithms is not obvious. It can be seen that the p-values of the four comparison algorithms are all less than the significance level of 5%, which means that there is a significant difference between the PODSBOA and other algorithms, and the PODSBOA is statistically superior.
(4) Comparing the results of identification using load disturbance data of two pre- and post-steady-state processes with different time lengths, when the same identification method is used, the identification accuracy of the PODSBOA is 4.09 based on 2-s data, and the identification accuracy of the PODSBOA is 6.65 based on 5-s data. By appropriately increasing the proportion of the disturbance process in the total data and reducing the sampling time of the process data before and after steady state, the identification accuracy of the load model can be improved. This is because in the load model parameter identification, more attention is paid to the load change of the disturbance process. The data before and after steady state should not be selected too long to avoid interference with the disturbance data during the identification process.

Table 6. Parameter identification results of the dynamic load model (0 s–5 s).

Table 7. p-value of the Wilcoxon signed rank test between each algorithm and the PODSBOA.
4 Discussion
This paper proposes the improved butterfly algorithm by combining the basic population optimization and dynamic strategy optimization, which solves the SLM parameter identification problem, reduces the identification error of SLM parameters, and improves the accuracy and stability of the model parameter identification results. The model identification error of the proposed algorithm in 2 s load data is 0.02, which is better than the identification errors of BOA, MWOA, GWO and SCSO. Similarly, the model identification error of the algorithm proposed in this paper in 5 s load data is 0.013, which is also better than the identification errors of BOA, MWOA, GWO and SCSO, and the convergence speed is much higher than that of the improved algorithm MWOA. The identification situation is also consistent with the actual fault recording data, which shows that the proposed algorithm can accurately reflect the real level of the actual load and realize the fine identification of SLM parameters quickly and accurately. However, there are still shortcomings. The proposed improved algorithm is based on the number of iterations to adjust the dynamic parameters, and the next step is to consider combining fitness to further optimize the search mode of the algorithm. Due to the limitation of space, only the effect of dynamic load model parameter identification based on the perturbed data of single-phase grounded short-circuit fault type is explained, and the effect of model identification based on the perturbed data of the remaining fault cases is not explained. In the next step, a variety of identification studies can be carried out for different fault disturbances to further verify the generalization ability of the proposed method.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
ZW: conceptualization, investigation, methodology, and writing–review and editing. GY: data curation, formal analysis, methodology, visualization, and writing–review and editing. YR: formal analysis, validation, and writing–original draft. HW: formal analysis, visualization, and writing–original draft.
Funding
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. This work was financially supported by Jiangxi Electric Power Company of State Grid. The funder was not involved in the study design, collection, analysis, interpretation of data, the writing of this article, or the decision to submit it for publication.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Arora, S., and Singh, S. (2019). Butterfly optimization algorithm: a novel approach for global optimization. Soft Comput. 23 (3), 715–734. doi:10.1007/s00500-018-3102-4
Bacanin, N., Stoean, R., Zivkovic, M., Petrovic, A., Rashid, T. A., and Bezdan, T. (2021). Performance of a novel chaotic firefly algorithm with enhanced exploration for tackling global optimization problems: application for dropout regularization. Mathematics 9 (21), 2705. doi:10.3390/MATH9212705
Bai, G., and Jing, P. (2015). Kinematic parameter identification of parallel manipulator based on improved particle swarm algorithm. Inf. Control 44 (5), 545–551. doi:10.13976/j.cnki.xk.2015.0545
Bu, F., Ma, Z., Yuan, Y., and Wang, Z. (2020). WECC composite load model parameter identification using evolutionary deep reinforcement learning. IEEE Trans. Smart Grid 11 (99), 5407–5417. doi:10.1109/tsg.2020.3008730
Chen, Y., Wu, H., Shen, Y., Meng, X., and Ju, P. (2022). A fast parameter identification method for composite load model based on jumping and steady-state points of measured data. IEEE Access 10, 97665–97676. doi:10.1109/ACCESS.2022.3206380
Cheng, Y., and Ju, P. (2003). Measured dynamic load parameters and power network stability calculation. Electr. Power Autom. Equip. 23 (4), 19–21. doi:10.3969/j.issn.1006-6047.2003.04.005
El-Shimy, M., Mostafa, N., Afandi, A. N., Sharaf, A. M., and Attia, M. A. (2018). Impact of load models on the static and dynamic performances of grid-connected wind power plants: a comparative analysis. Math. Comput. Simul. 149, 91–108. doi:10.1016/j.matcom.2018.02.003
Jordehi, A. R., Javadi, M. S., and Catalão, J. P. (2020). “Dynamic economic load dispatch in isolated microgrids with particle swarm optimisation considering demand response,” in 2020 55th International Universities Power Engineering Conference (UPEC), Turin, Italy, 01-04 September 2020 (IEEE), 1–5. doi:10.1109/UPEC49904.2020.9209769
Ju, P., Jin, Y., Chen, Q., Shao, Z., and Mao, C. (2010). Identifiability and identification of a synthesis load model. Sci. China Technol. Sci. 02, 461–468. doi:10.1007/s11431-009-0404-x
Ju, P., Xie, H., and Chen, Q. (2007). Development trend of electric load modeling research. J. Automation Electr. Power Syst. 31 (2), 1–4. doi:10.3321/j.issn:1000-1026.2007.02.00
Kang, P., Zhu, S., Wang, H., Fan, G., and Yang, G. (2021). Parameter identification of comprehensive load model with photovoltaic generation based on the IBOA algorithm. Renew. Energy Resour. 39 (11), 1541–1547. doi:10.13941/j.cnki.21-1469/tk.2021.11.018
Kosterev, D. N., Taylor, C. W., and Mittelstadt, W. A. (1999). Model validation for the August 10, 1996 WSCC system outage. IEEE Trans. power Syst. 14 (3), 967–979. doi:10.1109/59.780909
Ma, J., Han, D., He, R. M., Dong, Z. Y., and Hill, D. J. (2008). Reducing identified parameters of measurement-based composite load model. IEEE Trans. Power Syst. 23 (1), 76–83. doi:10.1109/TPWRS.2007.913206
Mahdavi, M., Javadi, M. S., Wang, F., and Catalão, J. P. (2021). “Optimal modeling of load variations in distribution system reconfiguration,” in 2021 IEEE International Conference on Environment and Electrical Engineering and 2021 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Bari, Italy, 07-10 September 2021 (IEEE), 1–6. doi:10.1109/EEEIC/ICPSEurope51590.2021.9584545
Shen, L. (2013). Research on parameter identification of power load model based on improved particle swarm optimization. China: Dalian Maritime University (Master thesis).
Tang, Y., Zhang, H., Zhang, D., and Hou, J. (2009). A synthesis load model with distribution network for power transmission system simulation and its validation. IEEE Power and Energy Society General Meeting, 1–7.
Wang, J., and Han, M. M. J. (2010). “A new identification strategy for improving convergence stability of load model parameters,” in International Conference on Electrical and Control Engineering, Wuhan, China, 25-27 June 2010 (IEEE), 145–148.
Yuan, H., Dai, H., Wei, X., and Ming, P. (2021). Internal polarization process revelation of electrochemical impedance spectroscopy of proton exchange membrane fuel cell by an impedance dimension model and distribution of relaxation times. Chem. Eng. J. 418, 129358. doi:10.1016/J.CEJ.2021.129358
Zad, B. B., Lobry, J., and Vallée, F. (2017). “Impacts of the load and line inaccurate models on the voltage control problem of the MV distribution systems,” in 52nd International Universities Power Engineering Conference (UPEC), Heraklion, Greece, 28-31 August 2017 (IEEE), 1–6. doi:10.1109/UPEC.2017.8231928
Zhang, Y., and Chen, F. (2018). A modified whale optimization algorithm. Comput. Eng. 44 (03), 208–213+219. doi:10.3969/j.issn.1000-3428.2018.03.035
Zhao, J., Ju, P., Shi, J., and Qin, C. (2020). Review and prospects for load modeling of power system. J. Hohai Univ. Sci. 48 (1), 87–94. doi:10.3876/j.issn.10001980.2020.01.013
Zhou, L., Peng, Z., Deng, C., Qi, X., and Li, P. (2018). A generalized synthesis load model considering network parameters and all-vanadium redox flow battery. Prot. Control Mod. Power Syst. 3, 32–13. doi:10.1186/s41601-018-0105-1
Keywords: grid simulation accuracy, improved butterfly algorithm, synthesis load model, key parameters, refined identification
Citation: Wang Z, Yan G, Rong Y and Wang H (2024) Refined identification of the key parameters of power system synthesis load model based on the improved butterfly algorithm. Front. Energy Res. 12:1419830. doi: 10.3389/fenrg.2024.1419830
Received: 19 April 2024; Accepted: 05 November 2024;
Published: 21 November 2024.
Edited by:
Chixin Xiao, University of Wollongong, AustraliaReviewed by:
Yushuang He, Changsha University of Science and Technology, ChinaBin Zhou, Hunan University, China
Nebojsa Bacanin, Singidunum University, Serbia
Copyright © 2024 Wang, Yan, Rong and Wang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Gaoyang Yan, aW5zdGl0dXRpb25hbDE3NkAxNjMuY29t