 Hairong Wang
Hairong Wang- College of Economics and Management, Nanjing University of Aeronautics and Astronautics, Nanjing, China
Accurate prediction of wind speed is critical for realizing optimal operation of a wind farm in real-time. Prediction is challenging due to a high level of uncertainty surrounding wind speed. This article describes use of a novel Extreme Learning Kalman Filter (ELKF) that integrates the sigma-point Kalman filter with the extreme learning machine algorithm to accurately forecast wind speed sequence using an Artificial Neural Network (ANN)-based state-space model. In the proposed ELKF method, ANNs are used to construct the state equation of the state-space model. The sigma-point Kalman filter is used to address the recursive state estimation problem. Experimental data validations have been implemented to compare the proposed ELKF method with autoregressive (AR) neural networks and ANNs for short-term wind speed forecasting, and the results demonstrated better prediction performance with the proposed ELKF method.
1 Introduction
To support environmental sustainability, wind energy is the best green energy source to replace high-carbon power generation. The use of wind power has increased dramatically, particularly in the past decade. It is challenging to control wind turbines and implement optimal wind farm operations for reliable wind power supplementation due to the stochastic nature of wind speed (Evans and Lio, 2022). It is crucial to obtain precise wind speed predictions for optimal control of wind turbines, using methods such as models of predictive control in stabilizing wind turbines (Hur and Leithead, 2022), to ensure stable supply of wind power. Predicting wind speed, especially in the short-term, is critical for improving power generation efficiency and extending the life span of a wind turbine (Bossanyi, 2003; Lio et al., 2017; Liew et al., 2022).
The existing methods for wind speed prediction in the short term represent two different classes. The first class includes physical model-based methods (Cassolaa and Burlando, 2012; Xu et al., 2020; Chen et al., 2021; Li et al., 2022). One physical model-based method is the numerical weather prediction method, in which predictions are based on physical models that include parameters characterizing the properties of the weather, such as atmospheric pressure, surface roughness, temperature, and many others (Lynch, 2008; Chen et al., 2021). However, the performance of the numerical weather prediction method deteriorates dramatically when the uncertainty of weather conditions is high. To address the uncertain nature of wind speed, statistical modeling has become more and more popular compared to models of the physical mechanism of wind speed. In the statistical approach, statistical methods are applied to model the temporal causality of wind speed (Shen et al., 2021; Ouyang et al., 2017). Currently, wind speed prediction often uses time series models or artificial neural network (ANN) models (Giorgi et al., 2011). Among time series model-based methods, autoregressive moving average (ARMA) models, with variants such as simplified autoregressive (AR) models and others, have been well-applied in forecasting wind speed sequence (Prema and Rao, 2015; Torres et al., 2005; Hanoon et al., 2022). However, the ARMA class methods need to increase model order to model causality in a time series, especially considering the stochastic variations of wind speed. Moreover, ARMA models are essentially linear models, which are not able to capture nonlinear features of the causality of wind speed. Therefore, ANNs are used to describe the nonlinear features of temporal causality in wind speed (Başaran and Filik, 2017; Kadhem et al., 2017; Malik et al., 2022). Although ANNs can handle the nonlinearity in wind speed dynamics, they cannot independently capture the dynamical nature of wind speed time series; therefore, a high-order model is necessary, which increases the complexity of the model.
State-space models are naturally suitable for describing the temporal causality of a dynamical system (Shen et al., 2020). Kalman filters can be used to identify the state-space models and infer the hidden state variables (Kitagawa, 1996; Kitagawa, 1987). Kalman filtering has been widely used in estimation problems, such as battery capacity estimation (Plett, 2004a; Plett, 2004b; Plett, 2004c; Plett, 2006a; Plett, 2006b). For nonlinear models, use of a sigma-point Kalman filter (SPKF) is an effective way to conduct the state estimation (Plett, 2006a; Plett, 2006b). However, accuracy of the SPKF relies on the goodness-of-fit of the model. Therefore, in this article, we propose the Extreme Learning Kalman Filter (ELKF), a novel method that combines SPKF and ANN to give accurate short-term predictions of wind speed. Our data indicate that the state-space model for wind speed can be obtained using noisy measurements of wind speed. With an ANN-based state-space model for dynamics of wind speed, we conduct SPKF modeling to obtain estimates of current wind speed, then use the estimation and an ANN-based state equation to further predict wind speed. The effectiveness of the proposed ELKF model has been validated using an experimental data set.
This article is organized into four sections. Section 2 includes a formal description of the problem. In Section 3, the proposed algorithm is presented after a brief introduction to the Extreme Learning Machine (ELM) based training algorithm for ANNs and SPKF. The results of experimental data-based validations are presented in Section 4, and the study conclusion appears in Section 5.
2 Problem formulation
Let t = 0, 1, 2, … define the discrete time index. Let
Assumption 1. The stochastic process st is a Markov process. Namely, the following holds.
Due to Assumption 1, we can use the state-space equation to describe the dynamical evolution of st, which is written by
where
We hold the following assumptions regarding ωt and νt.
Assumption 2. The system noise ωt and measurement noise νt are both identically independently distributed Gaussian noises.The problem that needs to be addressed is summarized as follows.Problem 1. With data set
and
To achieve the task, the following two sub-problems need to be addressed:
• construction of the approximate model
• design of filtering and prediction algorithms to estimate
3 Proposed method
3.1 ELM for training ANNs
ELM is an effective algorithm for training single-layer ANNs. Single-layer ANNs can be well trained to approximate standard multilayer ANNs. In a single-layer ANN, there are nonlinear activation functions as hidden nodes. For example, there are N samples (ui, oi), where
where
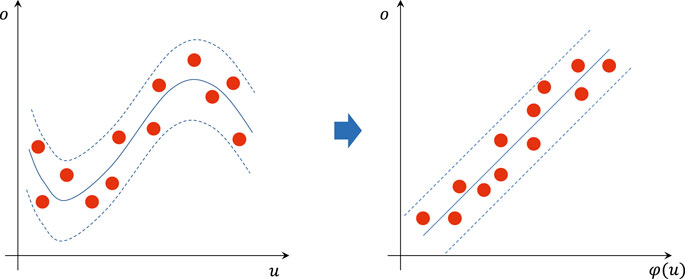
FIGURE 1. Essentials of the ELM algorithm: activation function mapping.
A single-layer ANN with S activation function φ(⋅) can approximate these N samples in the sense of zero means written by
then, by the theoretical result in Huang (2003), ∃S ≤ N, bj, ωj, βj such that
where the activation function adopts the same function denoted by φ(⋅). More generally, by defining
and
the above equation is equivalent to
We call H the output matrix of the hidden layer or the hidden layer output matrix. The ith column of H represents the ith hidden node output computed from the inputs u1, u2, … , uN. Generally, the values of
Let U = [u1, u2, … , uN] be the input matrix and O be the output matrix. The ELM algorithm for training single-layer ANNs is summarized in Algorithm 1. Note that HM represents the generalized inverse of H, called the Moore-Penrose generalized inverse, which is defined in Rao and Mitra (1972) and is calculated as
Thus, we calculate the estimation of β by
The effectiveness of Algorithm 1 is theoretically proven in Tamura and Tateishi (1997) when we assume that H is invertible, φ(⋅) is infinitely differentiable, and
Algorithm 1. Original ELM for single-layer ANNs
Input: U, O, S
Output: bj, ωj, β, j = 1, 2, … , S
Step 1: Generate bj and ωj,
Step 2: Compute H;
Step 3: Compute β = HMO
A sequential version can also be derived by way of the recursive least squares (RLS) algorithm (Chong and Zak, 2001), which is summarized as
3.2 Brief introduction to SPKF
SPKF is a generalized Kalman filter for estimating the state of nonlinear dynamical systems described by
where
In SPKF, several sigma points are selected to be the input of the nonlinear function. Note that the mean and covariance of the sigma points can be weighted to the values that are equal to the those of the a priori state estimation. These points are directed to a set of points output by the nonlinear function, which can be used to obtain the approximate mean and covariance of the a posteriori estimated state. In the state estimation problem for a system described by (Eqs 15, 16), the required number of sigma points is p + 1 = 2nx + 1. The generated set is defined by
where the matrix square root
Note that
Let
1) Update of the a priori state estimation. First, there is augmentation of a posteriori state estimation of the last time step,
and then augmentation of a posteriori covariance estimation,
Based on (Eqs 20, 21), we can generate p + 1 sigma points
In
The a priori state estimation at time step t is calculated as
2) Update of the error covariance. The a priori covariance estimation is obtained from the a priori sigma points
3) Estimation of the system output. The estimation of system output is computed from sigma points by using the observation equation. First, we calculate the estimated points
The output prediction is then given by
4) Determination of the estimated gain matrix. To calculate the estimated gain matrix, the required covariance matrices are first be computed by
Then, we simply compute
5) Update of the a posteriori state estimation. The a posteriori state estimation is
6) Computation of error covariance. We compute the covariance matrix of error by
3.3 Proposed algorithm
The framework of the ELKF method for predicting wind speed is illustrated in Figure 2 and the proposed algorithm is summarized in Algorithm 2.
Algorithm 2. Algorithm for the proposed ELKF method.
TRAIN
chooseactivationfunction ϕ(⋅)
setthenumberofactivationfunctions S
Implement Algorithm 1 and obtain
return
PREDICT
Update
Implement SPKF to obtain
Calculate
return
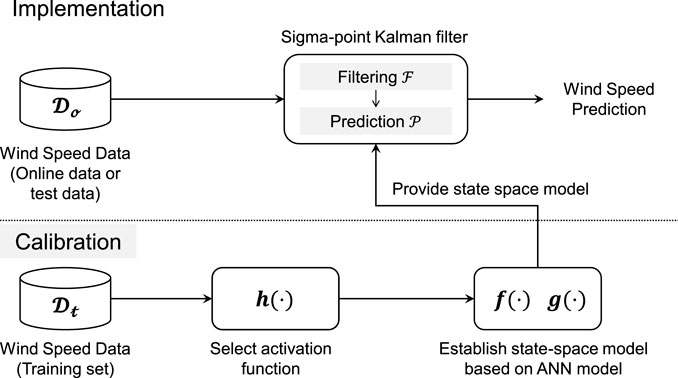
FIGURE 2. Framework of the ELKF method for predicting wind speed.
In the training step, the history data set
By implementing Algorithm 1, we obtain
Theorem 1. Assume that Assumption 2 holds. Then, if
then the following equation holds
Proof. Since Assumption 2 holds. We have
On the other hand,
Thus, (36) holds.
In the implementation step, the estimated model
where t0 = t.
Algorithm 3. Sequential ELM algorithm
Step 1: Initialize β by β0 which is obtained from historical data by Algorithm 1
Step 2: Compute ht+1 based on new measurement (ut+1, ot+1) according to Eq. 9, k = 0, 1, 2, … , i, …
Step 3: Update βt+1 by
where Mt+1 is computed by
Step 4: Set t = t + 1
4 Validation
4.1 Methods for comparison and the wind speed data set
Figure 3 illustrates the data set used in validation. The data sampling time is 10 min. A total of 61,858 data points were collected from a large wind farm located in Jiugongshan, Hubei, China within 12 consecutive days. The wind speed profiles exhibit similarity in time scale. We used the data from Day 1 to Day 10 for training the model and the rest of the data as the test set.
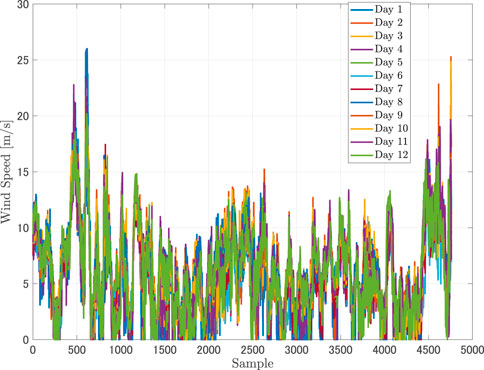
FIGURE 3. Data set for validation.
We compared the proposed ELKF method with the AR model and the ANN model. The ANN model is as described in Section 3. For n-step-ahead prediction, the addressed output is zt′ and the input is
where α1, … , αp are regression coefficients.
4.2 Results and discussion
Figure 4 and Figure 5 show plots of the results of predictions (one-step and five-step) for 200 samples using the AR model, ANN model, and ELKF method. The proposed ELKF method exhibits better performance compared to the AR model and the ANN model for both prediction horizons, since the predictions given by the AR and ANN models deviate significantly from the actual values. The predictions given by the proposed ELKF method are close to the actual values. Additionally, histograms of prediction residuals for both prediction horizons are shown in Figure 6. The proposed method has the predicted residuals concentrated to zero with relatively small fluctuation. The traditional methods result in residuals with larger variation. Therefore, our data suggest that the proposed ELKF method provides more reliable predictions.
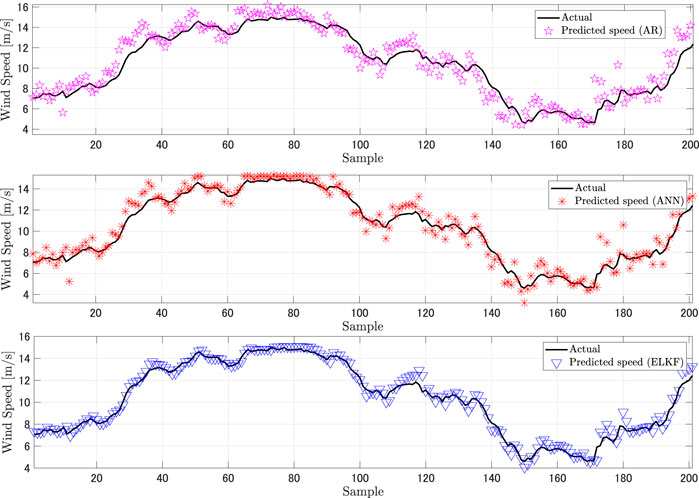
FIGURE 4. Results of wind speed prediction (predictive horizon: one-step): AR, ANN, and ELKF.

FIGURE 5. Results of wind speed prediction (predictive horizon: five-step): AR, ANN, and ELKF.
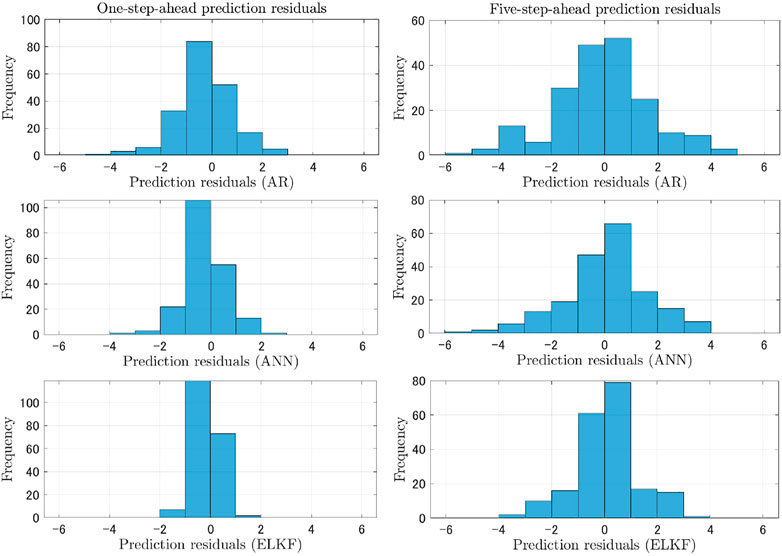
FIGURE 6. Probabilistic histograms of prediction residuals of AR, ANN, and ELKF.
Furthermore, the correlations between the predictions and the actual values of the samples in Figures 4 and 5 are plotted in Figure 7 and Figure 8, respectively. Compared to the AR and ANN models, the predictions given by the proposed ELKF method show smaller deviations and strong correlations between the actual values and predictions.
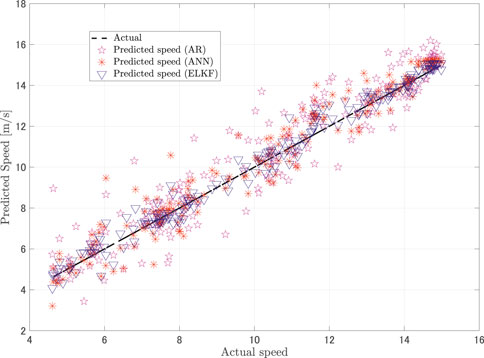
FIGURE 7. Correlation plots of one-step-ahead predictions versus actual values: AR, ANN, and ELKF.
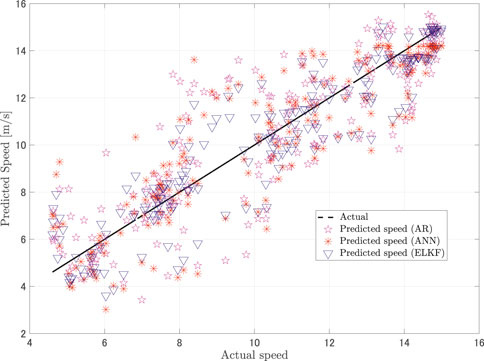
FIGURE 8. Correlation plots of five-steps-ahead predictions versus actual values: AR, ANN, and ELKF.
The results of root mean square error (RMSE) of performance of different methods from analysis of the full test data are summarized in Table 1. The results of the mean absolute error (MAE) calculation based on the performance of different methods are summarized in Table 2. RMSE is calculated by
MAE is calculated by
Our data indicate that the proposed ELKF method outperforms the AR and ANN models in different predictive horizons. The prediction performance of all methods degrades when the prediction horizon increases because the stochasticity become stronger when the prediction horizon becomes longer.
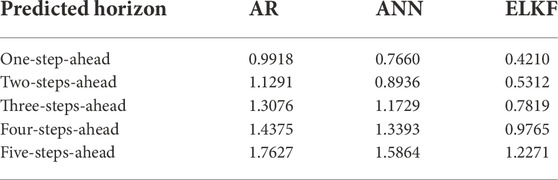
TABLE 1. Comparison of RMSE values (m/s) associated with values predicted by AR, ANN, and ELKF.
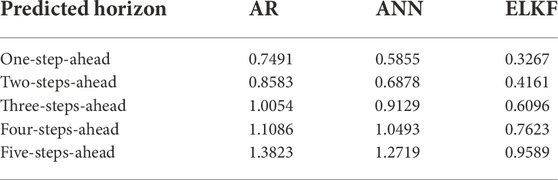
TABLE 2. Comparison of MAE values (m/s) associated with values predicted by AR, ANN, and ELKF.
The reason that the AR model does not give good predictions is that it is a linear time-series model that does not account for dynamic state update in wind speed sequence. The ANN adopts a nonlinear model and is able to depict the nonlinear feature of causality in wind speed sequence. However, the feature of dynamic state update remains unresolved. The proposed ELKF method adopts an ANN model in the dynamic system to address the nonlinear issue and uses SPKF to resolve the feature of dynamic state update. Therefore, the proposed ELKF method provides better performance in wind speed prediction.
Table 3 summarizes and compares the computation loads of the three methods. The online implementation time adopts the mean computation time in every step. The proposed ELKF has a slightly heavier computational load than AR in both the training process and online implementation. When using an ANN, the computation load dramatically increases during the training process. This is due to adoption of the ELM algorithm by the ELKF to train the single-layer ANN, which is more efficient.

TABLE 3. Comparison of AR, ANN, and ELKF computational loads.
5 Conclusion
In this article, a novel ELKF method is presented for predicting wind speed in the short term. The ELKF method combines the state-space model integrated with the ANN model and state estimation by SPKF. The ANN model is trained by the ELM algorithm and can be updated by a sequential ELM algorithm, which describes the nonlinearity of temporal causality in the time series data. Additionally, by using SPKF for state estimation, the proposed method can capture the dynamical feature of state updates in wind speed time series data. The proposed method can handle the high level of uncertainty of wind speed and produce better predictions compared to the traditional methods. Future work will focus on investigating wind power prediction for various wind turbines and in development of control methods for optimizing wind farm operation. For the proposed ELKF method, all collected data are assumed to be normal data. However, abnormal data may exist in collected data sets. Future work will also focus on using the clustering method to clean data sets to further improve wind speed prediction accuracy.
Data availability statement
The original contributions presented in the study are included in the article/Supplementary material. Further inquiries can be directed to the corresponding author.
Author contributions
The author confirms being the sole contributor to this work and has approved it for publication.
Acknowledgments
The author thanks Nan Yang at China Three Gorges University for his assistance in providing the experimental data set and his helpful comments that greatly improved the manuscript.
Conflict of interest
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Başaran, U., and Filik, F. (2017). Wind speed prediction using artificial neural networks based on multiple local measurements in eskisehir. Energy Procedia 107, 264–269. doi:10.1016/j.egypro.2016.12.147
Bossanyi, E. (2003). Wind turbine control for load reduction. Wind Energy (Chichester). 6, 229–244. doi:10.1002/we.95
Cassolaa, F., and Burlando, M. (2012). Wind speed and wind energy forecast through kalman filtering of numerical weather prediction model output. Appl. Energy 99, 154–166. doi:10.1016/j.apenergy.2012.03.054
Chen, H., Birkelund, Y., Anfinsen, S., Staupe-Delgado, R., and Yuan, F. (2021). Assessing probabilistic modelling for wind speed from numerical weather prediction model and observation in the arctic. Sci. Rep. 11, 7613. doi:10.1038/s41598-021-87299-4
Evans, M., and Lio, W. (2022). Computationally efficient model predictive control of complex wind turbine models. Wind Energy 25, 735–746. doi:10.1002/we.2695
Giorgi, M. D., Ficarella, A., and Tarantino, M. (2011). Error analysis of short term wind power prediction models. Appl. Energy 88, 1298–1311. doi:10.1016/j.apenergy.2010.10.035
Hanoon, M., Ahmed, A. N., Kumar, P., Razzaq, A., Zaini, N., Huang, Y. F., et al. (2022). Wind speed prediction over Malaysia using various machine learning models: Potential renewable energy source. Eng. Appl. Comput. Fluid Mech. 16, 1673–1689. doi:10.1080/19942060.2022.2103588
Huang, G. (2003). Learning capability and storage capacity of two-hidden-layer feedforward networks. IEEE Trans. Neural Netw. 14, 274–281. doi:10.1109/TNN.2003.809401
Hur, S., and Leithead, W. (2022). Model predictive and linear quadratic Gaussian control of a wind turbine. Optim. Control Appl. Methods 38, 88–111. doi:10.1002/oca.2244
Kadhem, A., Wahab, N., Aris, I., Jasni, J., and Abdalla, A. (2017). Advanced wind speed prediction model based on a combination of weibull distribution and an artificial neural network. Energies 10, 1744. doi:10.3390/en10111744
Kitagawa, G. (1996). Monte Carlo filter and smoother for non-Gaussian nonlinear state space models. J. Comput. Graph. Statistics 5, 1–25. doi:10.2307/1390750
Kitagawa, G. (1987). Non-Gaussian state-space modeling of nonstationary time series. J. Am. Stat. Assoc. 82, 1032–1063. doi:10.2307/2289375
Li, Y., Tang, F., Gao, X., Zhang, T., Qi, J., Xie, J., et al. (2022). Numerical weather prediction correction strategy for short-term wind power forecasting based on bidirectional gated recurrent unit and xgboost. Front. Energy Res. 9. doi:10.3389/fenrg.2021.836144
Liew, J., Göçmen, T., Lio, W., and Larsen, G. (2022). Streaming dynamic mode decomposition for short-term forecasting in wind farms. Wind Energy 25, 719–734. doi:10.1002/we.2694
Lio, W., Jones, B., and Rossiter, J. A. (2017). Preview predictive control layer design based upon known wind turbine blade-pitch controllers. Wind Energy (Chichester). 20, 1207–1226. doi:10.1002/we.2090
Lynch, P. (2008). The origins of computer weather prediction and climate modeling. J. Comput. Phys. 227, 3431–3444. doi:10.1016/j.jcp.2007.02.034
Malik, P., Gehlot, A., Singh, R., Gupta, L. R., and Thakur, A. K. (2022). A review on ann based model for solar radiation and wind speed prediction with real-time data. Arch. Comput. Methods Eng. 29, 3183–3201. doi:10.1007/s11831-021-09687-3
Ouyang, T., Kusiak, A., and He, Y. (2017). Modeling wind-turbine power curve: A data partitioning and mining approach. Renew. Energy 102, 1–8. doi:10.1016/j.renene.2016.10.032
Plett, G. (2004a). Extended kalman filtering for battery management systems of lipb-based hev battery packs-part 1: Background. J. Power Sources 134, 252–261. doi:10.1016/j.jpowsour.2004.02.031
Plett, G. (2004b). Extended kalman filtering for battery management systems of lipb-based hev battery packs-part 2: Modeling and identification. J. Power Sources 134, 262–276. doi:10.1016/j.jpowsour.2004.02.032
Plett, G. (2004c). Extended kalman filtering for battery management systems of lipb-based hev battery packs-part 3: State and parameter estimation. J. Power Sources 134, 277–292. doi:10.1016/j.jpowsour.2004.02.033
Plett, G. (2006a). Sigma-point kalman filtering for battery management systems of lipb-based hev battery packs: Part 1: Introduction and state estimation. J. Power Sources 161, 1356–1368. doi:10.1016/j.jpowsour.2006.06.003
Plett, G. (2006b). Sigma-point kalman filtering for battery management systems of lipb-based hev battery packs: Part 2: Simultaneous state and parameter estimation. J. Power Sources 161, 1369–1384. doi:10.1016/j.jpowsour.2006.06.004
Prema, V., and Rao, K. U. (2015). Time series decomposition model for accurate wind speed forecast. Renewables. 2, 18. doi:10.1186/s40807-015-0018-9
Rao, C., and Mitra, S. (1972). Generalized inverse of matrices and its application. New York: Wiley.
Shen, X., Ouyang, T., Yang, N., and Zhuang, J. (2021). Sample-based neural approximation approach for probabilistic constrained programs. IEEE Trans. Neural Netw. Learn. Syst. 34 (2), 1058–1065. doi:10.1109/TNNLS.2021.3102323
Shen, X., Ouyang, T., Zhang, Y., and Zhang, X. (2020). Computing probabilistic bounds on state trajectories for uncertain systems. IEEE Trans. Emerg. Top. Comput. Intell. 7 (1), 285–290. doi:10.1109/TETCI.2020.3019040
Tamura, S., and Tateishi, M. (1997). Capabilities of a four-layered feedforward neural network: Four layers versus three. IEEE Trans. Neural Netw. 8, 251–255. doi:10.1109/72.557662
Torres, J. L., Garcia, A., De Blas, M., and De Francisco, A. (2005). Forecast of hourly average wind speed with arma models in navarre (Spain). Sol. Energy 79, 65–77. doi:10.1016/j.solener.2004.09.013
Keywords: wind speed prediction, Kalman filter, uncertain dynamical systems, extreme learning machine, neural networks
Citation: Wang H (2023) Extreme learning Kalman filter for short-term wind speed prediction. Front. Energy Res. 10:1047381. doi: 10.3389/fenrg.2022.1047381
Received: 18 September 2022; Accepted: 21 October 2022;
Published: 12 April 2023.
Edited by:
Xun Shen, Tokyo Institute of Technology, JapanReviewed by:
Yan Zhang, Tokyo University of Agriculture and Technology, JapanShuang Zhao, Hefei University of Technology, China
Copyright © 2023 Wang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hairong Wang, MzY0NDE0NzJAcXEuY29t