 Wenyao Sun1,2
Wenyao Sun1,2 Yi Zhao
Yi Zhao
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Energy Res. , 18 January 2022
Sec. Smart Grids
Volume 9 - 2021 | https://doi.org/10.3389/fenrg.2021.823380
With the increasing penetration of distributed renewable generations (DRGs), microgrids will play an important role in the future power system. This paper studies the coordinated scheduling strategy of networked microgrids with private data exchange limitations and local management independence. Based on an adaptive robust optimization method, a coordinated scheduling model of networked systems considering the uncertainty of renewable generations is established. Then distributed algorithms are developed to meet the needs of data privacy protection of individual microgrids. The Augmented Lagrangian (AL) decomposition method decomposes the model into several sub-problems, and an alternate optimization method is developed to speed up the solution. Case studies demonstrate the effectiveness of the proposed model and the solution methods.
To peruse carbo neutrality, various distributed renewable generations (DRGs) are rapidly increasing, and accordingly, microgrids are gaining in importance in countries and regions where the power supply is gradually reducing dependence on traditional energy sources like coal-fired units (Lee et al., 2015; Li X et al., 2016). Microgrids can combine various renewable sources and optimize their use to meet local loads i.e., important buildings and households, etc (Tushar et al., 2014; Martin-Martínez et al., 2016; Zhang and Baillieul, 2016). Moreover, networked microgrids can serve as collaborative distributed systems for enhancing the power system resilience against increasing extreme events (Li et al., 2017; Wang et al., 2016b).
Networked microgrids usually consist of several individuals that correspond to different owners (Gao et al., 2018). Therefore, their operation management systems are independent and only have limited coordination with others. This situation needs to be changed: with the increasing distributed renewable generation integration, it is necessary to develop coordinated dispatching strategy for interconnected microgrids to obtain higher economic and reliable performance (Wang et al., 2016b). Also, the high integration of DRG highlights the importance of coordinating networked microgrids. In order to deal with the DRG uncertainty, each microgrid has to reserve enough spinning reserve capacity (Li et al., 2021). Yet, effective coordination between interconnected microgrids will greatly reduce the reserve capacity level of individual microgrids, since they can share spinning reserves against DRG uncertainty (Chen et al., 2021).
Coordinated dispatching strategy plays a significant role in managing collaborative networked microgrids (Che et al., 2015; Julia and Oliver, 2016; Yuan and Hesamzadeh, 2017). Although traditional centralized dispatching methods for power systems can deal with similar problems, they can hardly address some information issues of individual microgrids (Li et al., 2022a; Li et al., 2022b). Thus, various decomposition techniques have been proposed to solve the coordinated dispatching (Zheng et al., 2013). For example, Lagrangian relaxation (LR) is introduced by adding additional dummy buses (Saber and Venayagamoorthy, 2010; Ghazal et al., 2016), and it decomposes the coordinated dispatching strategy into sever-al sub-problems. Furthermore, the Augmented Lagrangian (AL) decomposition method improves the convergence of the standard LR by introducing a strong convex quadratic penalty (Hu et al., 2016). Also, distributed optimization technologies, such as alternating direction multiplier (ADMM), are used to solve coordinated dispatching in various distributed ways (Lu et al., 2012; Li et al., 2022).
Another noteworthy issue is that how to consider the uncertainty of DRGs. Stochastic optimization (SO) and robust optimization (RO) are typical tools for addressing dispatching problems considering uncertainty of intermittent power (Wang et al., 2014; Zheng et al., 2015; Ban et al., 2021; Mansour-Saatloo et al., 2020). For instance, an SO model is introduced to provide a probability guarantee for the solution in (Li S et al., 2016; Liu et al., 2016). However, these models rely on the accuracy of random scenes and their probability of realization. Instead of using random scenes, RO model uses uncertainty sets to capture randomness (Janak et al., 2007; Siddiqui et al., 2015). Then, solving the RO problem is to find an optimal scheme that is not affected by any disturbance within the uncertainty set (Lin et al., 2004; Parisio et al., 2012; Yuan et al., 2016). Due to its advantages, RO has been employed in optimal scheduling to handle the uncertainty. However, there are few reports on employing RO in decentralized scheduling that considers decision independence and information privacy to handle the uncertainty in net-worked microgrids (Mármol et al., 2012; Yang et al., 2019).
This work focuses on the impact of DRG uncertainty on coordinated dispatching strategy for interconnected microgrids with high penetration distributed renewable generations. It formulates the problem in a distributed way and the proposed framework can preserve information privacy and management independence of individual microgrids. A two-stage robust optimization scheme establishes a decentralized coordinated scheduling model with uncertain DRGs, and the AL method is employed to decompose the scheduling model into several easy-solving sub-problems, which will speed up the solution of the problem in a decentralized way.
This section presents the framework of networked microgrids, and then it raises the formulation of the proposed optimization model by introducing the coordinated dispatching strategy preserving decision independence and information privacy.
Due to the large-scale integration of intermittent DRGs, future power systems will be very different from traditional ones. For example, networked microgrids will play an increasing important role in future energy supply to hedge against the uncertainties of DRGs. As shown in Figure 1, each microgrid has its own decisions and objectives. And accordingly, each microgrid is equipped with a local manager (LM) that provides control and monitoring of local DRGs, distributed generations (DGs) and loads. Besides, each LM is also responsible for determining power exchanges with the others, on/off states of DGs, and charging/discharging states of energy storage systems.
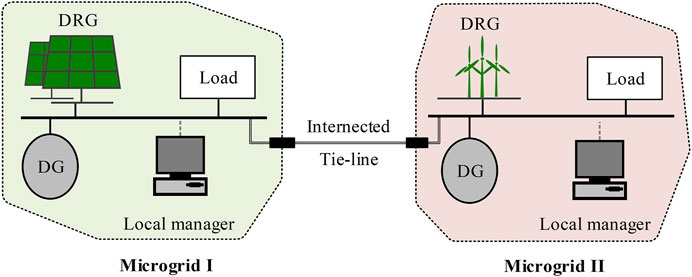
FIGURE 1. Framework of networked microgrids with the individually local managers.
In energy management, individual microgrids intend to independently obtain a robust strategy to avoid the risk from uncertainties of renewables and loads while keeping their data private. In this setting, this paper studies a model that considers two stages, i.e., the first one considers the joint scheduling of on/off states of generation units and tie-line power, and the second one considers the dispatch with uncertain DRG power. Accordingly, the decision variables mainly include the DRG power, storage charge/discharge power, and exchange power, etc. The exchange power represents the coordination among individual microgrids, which is decided in a decentralized way to preserve the decision independence and information privacy.
The objective, see Eq. 1, is to minimize the total cost of the optimal scheduling. The cost includes 1) the de-cision-making cost of traditional generation units in stage I and 2) the dispatch cost considering the worst-case of DRGs in stage II.
where f I m (*) and f II m (*) are total on/off cost function and total economic dispatch cost function of microgrid m, χI m and χII m represent decision variable vector of stages I and II, PR*m and PRm represent vector of forecasted and available DRG power, ΩI m and ΩII m are feasible sets of decision variables of microgrid m in stages I and II, ϒRm is uncertainty set of available DRG power of microgrid m, and NM is the set of microgrids.
The decision variables in stage I involves the scheduling of generator units and connection lines in individual microgrids.
where IG g,t is binary variable that is equal to 1 if generation unit g is on at period t and 0 otherwise, XG g,t is binary variable that is equal to 1 if generation unit g is started up at period t and 0 otherwise, YG g,t is binary variable that is equal to 1 if generation unit g is started down at period t and 0 otherwise, αm,i,t is phase angle variable of boundary bus i at period t perceived by microgrid m, g and NGm are indices and set of generation units in microgrid m, NBm and NB**m are the set of indices of connection buses in microgrid m and the set of indices of others connection buses connected to microgrid m, t and NT are indices and set of periods, respectively.
The costs associated with the first stage which includes startup costs, shutdown costs, and no-load costs of traditional units, which are as
where cONg, cOFFg and cNDg are startup and shutdown cost, and non-load cost of generation unit g, respectively.
The decision variables in stage II include the generation scheduling of conventional units and renewables, and the phase angles of the internal buses in microgrid m.
where PG g,t is generation output of conventional generation unit g at period t, PUPg,t/PDOWNg,t is upward/downward reserve capacity of generation unit g at period t, PR r,t is generation output of renewable unit r at period t, and θi,t is the phase angle of internal bus i at period t.
The dispatch cost associated with stage II is as
where fGg is piecewise linear cost of generation unit g, cr is penalty price of renewable generation curtailment r.
This paper describes the randomness of DRGs with an uncertainty set, which is compiled using a typical uncertainty budget set (Bertsimas and Sim, 2004). The uncertainty set is defined using a typical uncertainty budget set, and it benefits flexible adjusting the conservativeness of the robust solution with different level of uncertainty set ΩR m, which is defined as
where the auxiliary variables are defined as
The variable set χI is in the feasible region of stage I, hereafter refer as ΩI, and its constraints are defined as
where (7) is the phase angle coupling constraint of the tie line amongst microgrids, (8) sets the phase angle of the reference bus as 0, (9) limits the tie-line capacity, (10) is the logical constraints on the status of the units, (11) is the minimum up/down time limits of the generator set, and (12) defines the feasible sets of the first stage variables.
The feasible set ΩIIm of decision-making in the second stage of microgrid m is as
where (13) and (14) are the DC power flow constraints of buses, (15) and (16) are the internal transmission line capacity constraints, (17) represents the power generation capacity of DRGs. Note that the other typical constraints including ramping up/down limits, generation limits, system spinning/operation reserve requirements, regulation up/down requirements, regulation down requirement are not listed in this paper, and interested readers are referred to (Ban et al., 2017) and (Wang et al., 2008) for more details.
`This section introduces the solution method for the formulated problem. Firstly, the AL decomposition method de-composes the model into several simple problems for individual microgrids, and the standard ADMM algorithm is used to solve it. Secondly, the independent sub-problems are solved by the column constraint generation (C&CG) method. Thirdly, a heuristic method is developed to alleviate the solution complexity by obtaining a suboptimal solution in limited iterations.
The AL relaxation of microgrid m is formulated by relaxing the coupled constraints (6) and (7), and it gets
where λm,i,t is the dual variable corresponding to the difference between phase angle of boundary bus i perceived by microgrid m (i.e., αm,i,t) and the average phase angle of boundary bus i perceived by its connecting microgrids (i.e., ‾α,i,t). λm,i,t reflects the shadow prices of boundary-bus angles between different microgrids. ‾α,i,t is the average angle perceptual value of all lines connected to boundary bus i, and it is expressed as
where Ξi is the set of the microgrids connected to the bus, and |Ξi| indicates the total number of microgrids connected to bus i.
The sub-problem of microgrid m (i.e., SPm) can be solved using its augmented Lagrangian relaxation.
The ADMM algorithm solves the sub-problem. In the solution framework, each microgrid only exchanges the phase angles of boundary buses with its neighbors in a decentralized way. Accordingly, the privacy of individuals can be fully preserved. Detailed solution method is given in Figure 2, and it mainly includes 6 steps, namely initialization, exchanging information, updating perception, subproblem computation, checking convergence, and updating dual variables. Individuals only exchanges boundary information (i.e., the phase angles of the boundary buses) with the others, and accordingly, this distributed algorithm protects information privacy when individuals managing their own decisions, also it contributes to promoting the development of underlying electricity market.
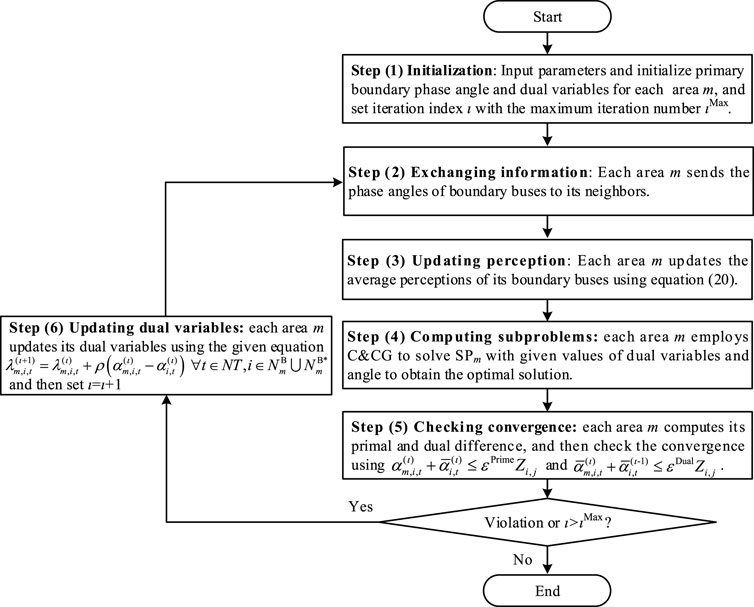
FIGURE 2. Flowchart of the employed ADMM.
The C&CG algorithm solves the sub-problems (Zeng and Zhao, 2013). Similar to other decomposition methods, the C&CG method separates the original problem to a master one, i.e., MPm, and several sub-problems, i.e., BSPm. And the master problem and sub-problems are defined as
The employed C&CG solution process is shown in Figure 3, which mainly includes 5 steps, namely initialization, solve the master problem MPm, solving the subproblem BSPm, checking convergence, generating constraints and columns.
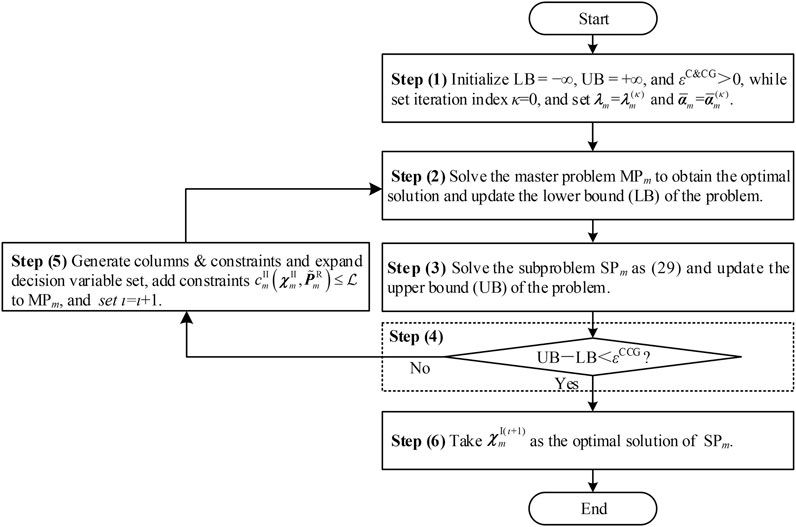
FIGURE 3. Flowchart of the subproblems.
Since the standard ADMM can hardly guarantee the solution convergence of the proposed problem, a heuristic method is employed to improve the solution performance. The details are given as follows.
Firstly, set the variables IG g,t as continuous variables ranging from 0 to 1 and relax the corresponding integrality constraints. Accordingly, a relaxed version of the model is obtained. The relaxed one is equivalent to a linear programming with multiple scenarios, and then it can be solved by the ADMM, which ensures the convergence for linear programs. The continuous relaxation is solved to provide initial values of boundary-bus phase angles α0m*,i,t for the iteration loop with iteration time index ι = 0.
Secondly, it optimizes the unit commitment problem when the phase angles of the boundary buses are fixed, namely
where α(ι)m*,i,t represents the last solution. Under fixed conditions, the original problem is decomposed into the following regional sub-problems
The above problem is an adaptive robust problem with a given tie-line power flow. In the case of similar structures, the C&CG algorithm is used to solve finite convergence. The optimal solutions IGg,t, XGg,t and YGg,t are denoted by IGg,t, XG(ι)g,t and YG(ι)g,t respectively.
Thirdly, if the binary variable set has not changed in iteration ι, namely
then binary variables IGg,t, XGg,t, and YGg,t, are taken as the final solution, otherwise, set ι = ι+1 and go to the next iteration.
Lastly, it optimizes the phases angles of the boundary buses when the obtained binary states of generation units, i.e., IGg,t, XGg,t, YGg,t, are fixed. Note that the original problem becomes a linear one, which can be easily solved using the standard ADMM algorithm. In this way, the original problem is largely simplified while ensuring the solution accuracy.
All simulations are run on a PC with implemented with MATLAB R2014a at Intel Core i7-4600U 2.10 GHz with 8 GB memory. The related MILP and mixed integer quadratic programming (MIQP) problems are solved by Gurobi 9.0.A.
Case studies were carried out on the system consisting of two microgrids. As shown in Figure 4, the system involves two microgrids, connected by a tie-line. The studied DRG is integrated into microgrid II.
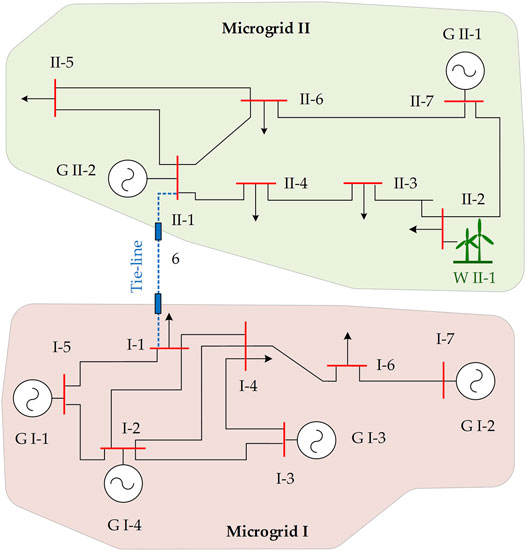
FIGURE 4. The studied system consisting of two interconnected microgrids.
The hourly forecast value and forecast interval of renewable generation are shown in Figure 5. The upper and lower limits represent the uncertain set. It is assumed that the system operating reserve, spinning reserve and regulation are 10, 5 and 2% of the system load, respectively. And the parameters are set as follows. The uncertainty budget, i.e., Γ, is 12. The penalty factor of the ADMM is 0.5. The penalty factor of the ADMM program is the convergence tolerance of the original residue and the dual residue of the ADMM program. The maximum number of the iterations of is set as 200. The relative convergence tolerance of the C&CG program is 0.05%. The subproblems were solved with the MIP and MIQP solvers, and the relative gap tolerances are set to 0.1%. And the other key parameters of units, transmission lines, and hourly load are listed in Tables 1, 2, 3, respectively.
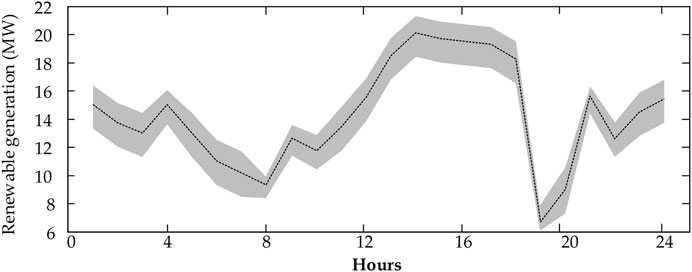
FIGURE 5. The forecast value and interval of renewable generation.

TABLE 1. Parameters of generation units.
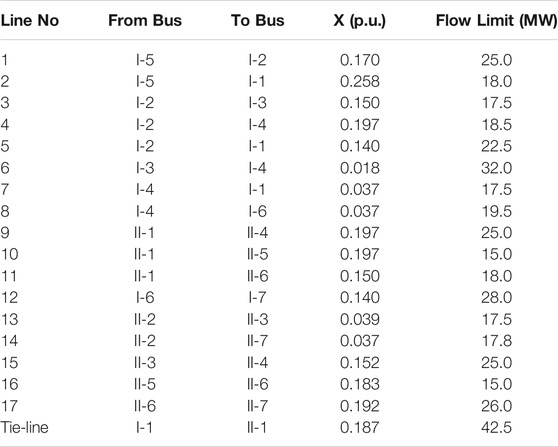
TABLE 2. Parameters of transmission lines.

TABLE 3. Parameters of hourly load.
The solution method in Section 3 was used to solve the problem. Figures 6, 7 illustrate the solution process. Figure 6 shows the maximum solution gap as a function of the iterations. The maximum gap is decreased to the defined tolerance in 60 iterations. Meanwhile, Figure 7 shows the maximum tie-line power gap converging to a coincided value indicating that the solution succeeds.
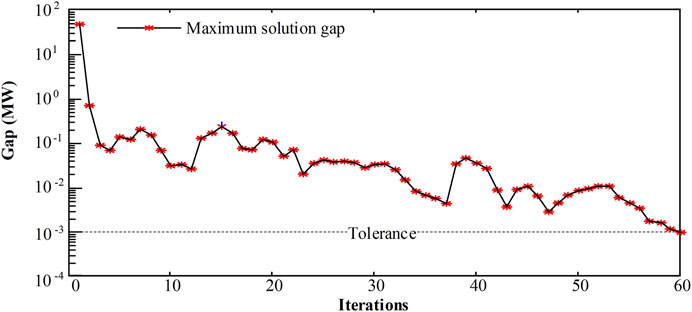
FIGURE 6. Evolution of the maximum solution gap.
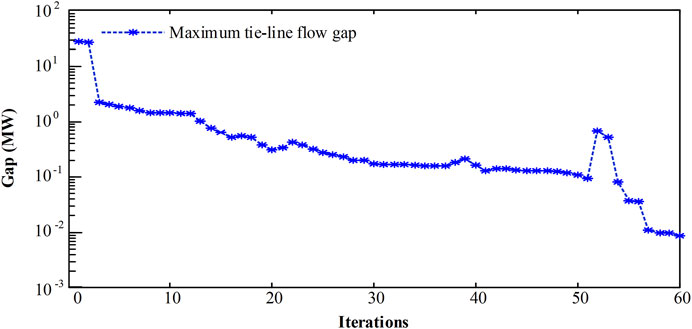
FIGURE 7. Evolution of the maximum tie-line flow gap.
In the solution process, the continuous relaxation is solved by the ADMM. The process continues till the primal and dual residues at each ADMM iteration converges to predefined values. Then in the iteration loop of the heuristic solution method, see Section 3.3, the boundary phase angles were fixed to solve the other part of the problem by the C&CG procedure, see Section 3.2, to obtain on/off states of DGs. Accordingly, the binary variables were fixed. Again, the binary-fixed problem was solved by the ADMM, and another heuristic solution method was started. If the binary solutions of the problem were the same as their previous values, then the solution terminates; otherwise, the solution process will continue.
To further verify the effectiveness of the proposed solution methods, the problem was re-solved in a centralized way with identical parameters, and the results were compared. It shows that the results of the employed approaches are very close to those of the centralized method. For example, the commitment states of the former one are identical to the solutions of the latter one, except that the smallest generation unit G II-2 is additionally committed by the proposed method at hours 4 and 5 h and the tie-line flow of them show some differences. Although these differences indicate the suboptimality of the proposed methods, the optimal quality of the employed solution is highly satisfactory. For instance, the objective value, i.e., the total cost, of the latter one is $ 47,050, which is slightly lower than that of the employed ones ($ 47,120) by 0.12%.
The computation time is 76 s of paralleled CPU time, which is the sum of computation time of regional subproblems in each iteration. It also shows that in cases with small budgets, the solution methods typically take more computational time. However, the computation burden is acceptable in practical cases. The proposed method is developed to solve that preserve decision independence and information privacy in a fully decentralized manner, rather than competing with the centralized method in computational efficiency. It is worthy noted that the developed decentralized method, protecting decision-making independence and information privacy, deserve more research on its computational efficiency, which will be a key part of our future work.
Moreover, a modified IEEE 118-bus system is used to analyze the proposed solution approach. It involves 76 units, 186 branches, and 91 demands, please see the one-line diagram in Figure 9 in the previous work (Wang et al., 2008). And the detailed data of the 118-bus system can be found at motor. ece.iit.edu/data/SCUC_118. For simplicity, we also use the same three zones in Figure 9 (Wang et al., 2008), and assume each zone has the same requirements of decision-making independence and information privacy. The other parameters are the same as those in the small-scale cases. Then the computation time, in this case, is about 1957 s of paralleled CPU time and the objective value has a 0.43% gap with the centralized solution method. This further demonstrates the effectiveness of the proposed method.
The hourly commitment and dispatch results are given in Figure 8. And the tie-line flow schedules are given in Figure 9, where a positive power refers to tie-line flow withdrawing from microgrid I and injecting into microgrid II.
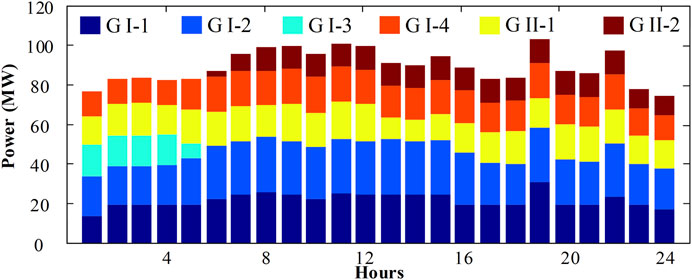
FIGURE 8. Hourly dispatch results of the generators.
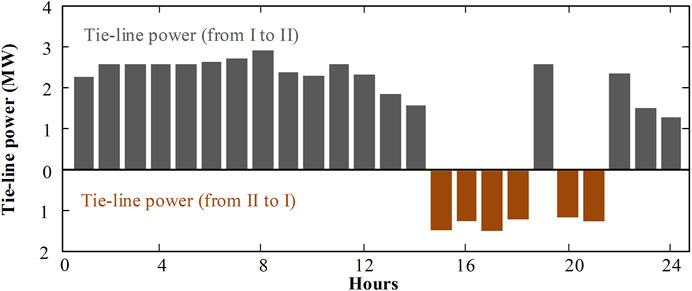
FIGURE 9. Profiles of the hourly tie-line power components.
The scheduled tie-line flow profiles are similar to the system load profiles. At off-peak hours (14–18 and 20–21) when load demand in microgrid I is low, the power components of the cheapest generator in microgrid I are exported to microgrid II, resulting in negative tie-line flows. Otherwise, at on-peak hours, the local DGs can hardly supply all the loads in microgrid II, it is necessary to import energy from microgrid I to microgrid II, and accordingly, the tie-line schedules are positive at these hours. The results reveal that the coordinated tie-line flows adapt to the load demand in individual microgrids for enhancing the overall economic and steady performances. By comparison, if the two microgrids have no power exchange, then the target value of the robust scheduling is obviously 3.5% higher than that in the networked cases. Essentially, the coordination encourages the economic power flows from the microgrids with lower location marginal price to the microgrids with higher location marginal price. In addition, different microgrids can share their regulatory capabilities to hedge against RDG uncertainty.
Furthermore, to consider future power system with large-scale energy storage, e.g., pumped storage units and megawatt-class batteries, a new scenario in which an energy storage (see Table 4) is installed to bus II-5 is introduced. Figure 10 and Figure 11 show the dispatching results and the tie-line flow schedules with the additional energy storage. They reveal the influence of energy storage on the scheduling of the networked microgrids. In the new scenario, the total cost is reduced to $ 46,405, about 98.5% of the original one. It illustrates the effectiveness of energy storage in accommodating the volatile DRGs. And it also shows the proposed method can effectively coordinate the scheduling in the new cases with more privacy information, e.g., the parameters of the storage are only known by the microgrid II. However, it is noteworthy that the system obtains an additional $ 715 by introducing a 50 MWh energy storage. The income can hardly cover the investment, especially if costly battery storage is employed. This is an important issue but beyond the scope of this paper.

TABLE 4. Parameters of the introduced energy storage.
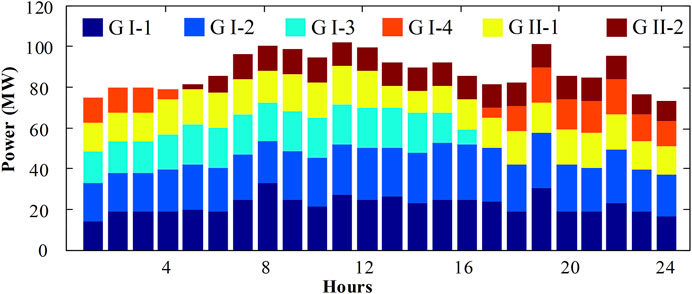
FIGURE 10. Hourly dispatch results of the generators.
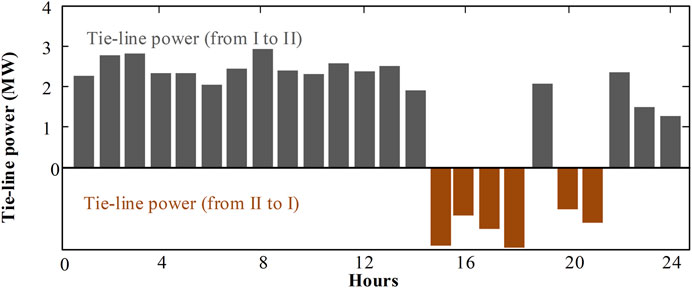
FIGURE 11. Profiles of the hourly tie-line power components.
This paper studies the joint scheduling strategy for networked microgrids with high penetration distributed renewable generations. It employs some decomposition techniques like Augmented Lagrangian, ADMM and CC&G to solve the proposed problem. The developed method can find sub-optimal solutions in a decentralized manner, protecting the decision independence and information privacy of individual microgrids. Case studies demonstrate that the proposed method achieves speed convergence, and the joint scheduling brings obvious economic benefits to the operation of networked microgrids. Future work will consider more demand responses in the dispatching issues of networked microgrids, and more research can be done to improve the computational efficiency of solution method.
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Conceptualization, WS and YT; methodology, YZ; software, WS; validation, HZ, QF, and YT; formal analysis, ML; investigation, WS; resources, YZ; data curation, WS; writing—original draft preparation, WS; writing—review and editing, YT; visualization, YS and YZ; supervision, WS; project administration, YT; All authors have read and agreed to the published version of the manuscript.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Ban, M., Yu, J., Shahidehpour, M., and Yao, Y. (2017). Integration of Power-To-Hydrogen in Day-Ahead Security-Constrained Unit Commitment with High Wind Penetration. J. Mod. Power Syst. Clean. Energ. 5, 337–349. doi:10.1007/s40565-017-0277-0
Ban, M., Bai, W., Zhu, L., Song, W., Xia, S., Zhu, Z., et al. (2021). Optimal Scheduling for Integrated Energy-Mobility Systems Based on A Renewable-To-Hydrogen Station and Tank Truck Fleets. IEEE Trans. Industry Appl. to be published. doi:10.1109/TIA.2021.3116117
Bertsimas, D., and Sim, M. (2004). The Price of Robustness. Oper. Res. 52, 35–53. doi:10.1287/opre.1030.0065
Che, L., Shahidehpour, M., Alabdulwahab, A., and Al-Turki, Y. (2015). Hierarchical Coordination of a Community Microgrid with AC and DC Microgrids. IEEE Trans. Smart Grid 6, 3042–3051. doi:10.1109/TSG.2015.2398853
Chen, B., Wang, J., Lu, X., Chen, C., and Zhao, S. (2021). Networked Microgrids for Grid Resilience, Robustness, and Efficiency: A Review. IEEE Trans. Smart Grid 12, 18–32. doi:10.1109/TSG.2020.3010570
Gao, H., Liu, J., Wang, L., and Wei, Z. (2018). Decentralized Energy Management for Networked Microgrids in Future Distribution Systems. IEEE Trans. Power Syst. 33, 3599–3610. doi:10.1109/TPWRS.2017.2773070
Ghazal, R., Brouwer, J., and Samuelsen, S. (2016). A Spatially and Temporally Resolved Model of the Electricity Grid - Economic vs Environmental Dispatch. Appl. Energy 178, 540–556. doi:10.1016/j.apenergy.2016.06.066
Hu, J., Morais, H., Sousa, T., and Lind, M. (2016). Electric Vehicle Fleet Management in Smart Grids: A Review of Services, Optimization and Control Aspects. Renew. Sustain. Energ. Rev. 56, 1207–1226. doi:10.1016/j.rser.2015.12.014
Janak, S. L., Lin, X., and Floudas, C. A. (2007). A New Robust Optimization Approach for Scheduling under Uncertainty. Comput. Chem. Eng. 31, 171–195. doi:10.1016/j.compchemeng.2006.05.035
Julia, S., and Oliver, S. (2016). A Two-Stage Model Predictive Control Strategy for Economic Diesel-PV-Battery Island Microgrid Operation in Rural Areas. IEEE Trans. Sustain. Energ. 7, 903–913. doi:10.1109/TSTE.2015.2509031
Lee, J., Guo, J., Choi, J. K., and Zukerman, M. (2015). Distributed Energy Trading in Microgrids: A Game-Theoretic Model and its Equilibrium Analysis. IEEE Trans. Ind. Electron. 62, 3524–3533. doi:10.1109/TIE.2014.2387340
Li, Z., Shahidehpour, M., Aminifar, F., Alabdulwahab, A., and Al-Turki, Y. (2017). Networked Microgrids for Enhancing the Power System Resilience. Proc. IEEE 105, 1289–1310. doi:10.1109/JPROC.2017.2685558
Li, Y., Han, M., Yang, Z., and Li, G. (2021). Coordinating Flexible Demand Response and Renewable Uncertainties for Scheduling of Community Integrated Energy Systems with an Electric Vehicle Charging Station: A Bi-level Approach. IEEE Trans. Sustain. Energ. 12, 2321–2331. doi:10.1109/TSTE.2021.3090463
Li, Y., Wang, R., and Yang, Z. (2022a). Optimal Scheduling of Isolated Microgrids Using Automated Reinforcement Learning-Based Multi-Period Forecasting. IEEE Trans. Sustain. Energ. 13, 159–169. to be published. doi:10.1109/TSTE.2021.3105529
Li, Y., Li, K., Yang, Z., Yu, Y., Xu, R., and Yang, M. (2022b). Stochastic Optimal Scheduling of Demand Response-Enabled Microgrids with Renewable Generations: An Analytical-Heuristic Approach. J. Clean. Prod. 330. doi:10.1016/j.jclepro.2022.129840
Li, S., Coit, D. W., and Felder, F. (2016). Stochastic Optimization for Electric Power Generation Expansion Planning with Discrete Climate Change Scenarios. Electric Power Syst. Res. 140, 401–412. doi:10.1016/j.epsr.2016.05.037
Li, X., Wen, J., and Malkawi, A. (2016). An Operation Optimization and Decision Framework for A Building Cluster with Distributed Energy Systems. Appl. Energy 178, 98–109. doi:10.1016/j.apenergy.2016.06.030
Lin, X., Janak, S. L., and Floudas, C. A. (2004). A New Robust Optimization Approach for Scheduling under Uncertainty:. Comput. Chem. Eng. 28, 1069–1085. doi:10.1016/j.compchemeng.2003.09.020
Liu, C., Lee, C., Chen, H., and Mehrotra, S. (2016). Stochastic Robust Mathematical Programming Model for Power System Optimization. IEEE Trans. Power Syst. 31, 821–822. doi:10.1109/TPWRS.2015.2394320
Lu, R., Liang, X., Li, X., Lin, X., and Shen, X. (2012). EPPA: An Efficient and Privacy-Preserving Aggregation Scheme for Secure Smart Grid Communications. IEEE Trans. Parallel Distrib. Syst. 23, 1621–1631. doi:10.1109/TPDS.2012.86
Mansour-Saatloo, A., Agabalaye-Rahvar, M., Mirzaei, M. A., Mohammadi-Ivatloo, B., Abapour, M., and Zare, K. (2020). Robust Scheduling of Hydrogen Based Smart Micro Energy Hub with Integrated Demand Response. J. Clean. Prod. 267, 122041. doi:10.1016/j.jclepro.2020.122041
Mármol, F., Sorge, C., Ugus, O., and Pérez, G. (2012). Do Not Snoop My Habits: Preserving Privacy in the Smart Grid. IEEE Commun. Mag. 50, 166–172. doi:10.1109/MCOM.2012.6194398
Martin-Martínez, F., Sánchez-Miralles, A., and Rivier, M. (2016). A Literature Review of Microgrids: A Functional Layer Based Classification. Renew. Sustain. Energ. Rev. 62, 1133–1153. doi:10.1016/j.rser.2016.05.025
Parisio, A., Del Vecchio, C., and Vaccaro, A. (2012). A Robust Optimization Approach to Energy Hub Management. Int. J. Electr. Power Energ. Syst. 42, 98–104. doi:10.1016/j.ijepes.2012.03.015
Saber, A. Y., and Venayagamoorthy, G. K. (2010). Intelligent Unit Commitment with Vehicle-To-Grid -A Cost-Emission Optimization. J. Power Sources 195, 898–911. doi:10.1016/j.jpowsour.2009.08.035
Siddiqui, S., Gabriel, S. A., and Azarm, S. (2015). Solving Mixed-Integer Robust Optimization Problems with Interval Uncertainty Using Benders Decomposition. J. Oper. Res. Soc. 66, 664–673. doi:10.1057/jors.2014.41
Tushar, M. H. K., Assi, C., Maier, M., and Uddin, M. F. (2014). Smart Microgrids: Optimal Joint Scheduling for Electric Vehicles and Home Appliances. IEEE Trans. Smart Grid 5, 239–250. doi:10.1109/TSG.2013.2290894
Wang, J., Shahidehpour, M., and Li, Z. (2008). Security-Constrained Unit Commitment with Volatile Wind Power Generation. IEEE Trans. Power Syst. 23, 1319–1327. doi:10.1109/TPWRS.2008.926719
Wang, Z., Chen, B., Wang, J., Kim, J., and Begovic, M. M. (2014). Robust Optimization Based Optimal DG Placement in Microgrids. IEEE Trans. Smart Grid 5, 2173–2182. doi:10.1109/TSG.2014.2321748
Wang, Z., Chen, B., Wang, J., and Chen, C. (2016a). Networked Microgrids for Self-Healing Power Systems. IEEE Trans. Smart Grid 7, 310–319. doi:10.1109/TSG.2015.2427513
Wang, Z., Chen, B., Wang, J., and Kim, J. (2016b). Decentralized Energy Management System for Networked Microgrids in Grid-Connected and Islanded Modes. IEEE Trans. Smart Grid 7, 1097–1105. doi:10.1109/TSG.2015.2427371
Yang, M., Zhang, X., and Shen, X. (2019). Efficient Privacy-Preserving Multi-Dimensional Data Aggregation Scheme in Smart Grid. IEEE Access 7, 32907–32921. doi:10.1109/ACCESS.2019.2903533
Yuan, Z., and Hesamzadeh, M. R. (2017). Hierarchical Coordination of TSO-DSO Economic Dispatch Considering Large-Scale Integration of Distributed Energy Resources. Appl. Energy 195, 600–615. doi:10.1016/j.apenergy.2017.03.042
Yuan, Y., Li, Z., and Huang, B. (2016). Robust Optimization under Correlated Uncertainty: Formulations and Computational Study. Comput. Chem. Eng. 85, 58–71. doi:10.1016/j.compchemeng.2015.10.017
Zeng, B., and Zhao, L. (2013). Solving Two-Stage Robust Optimization Problems Using a Column-And-Constraint Generation Method. Oper. Res. Lett. 41, 457–461. doi:10.1016/j.orl.2013.05.003
Zhang, B., and Baillieul, J. (2016). Control and Communication Protocols Based on Packetized Direct Load Control in Smart Building Microgrids. Proc. IEEE 104, 837–857. doi:10.1109/JPROC.2016.2520759
Zheng, Q. P., Wang, J., Pardalos, P. M., and Guan, Y. (2013). A Decomposition Approach to the Two-Stage Stochastic Unit Commitment Problem. Ann. Oper. Res. 210, 387–410. doi:10.1007/s10479-012-1092-7
Keywords: networked microgrids, robust optimization, distributed renewable generation, dispatching, privacy
Citation: Sun W, Tian Y, Zhao Y, Zhang H, Fu Q and Li M (2022) Coordinated Scheduling Strategy for Networked Microgrids Preserving Decision Independence and Information Privacy. Front. Energy Res. 9:823380. doi: 10.3389/fenrg.2021.823380
Received: 27 November 2021; Accepted: 21 December 2021;
Published: 18 January 2022.
Edited by:
Yang Li, Northeast Electric Power University, ChinaReviewed by:
Jun Yin, North China University of Water Resources and Electric Power, ChinaCopyright © 2022 Sun, Tian, Zhao, Zhang, Fu and Li. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Youwen Tian, eW91d2VuX3RpYW4zOTVAMTYzLmNvbQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.