 Ke Luo
Ke Luo Yingying Jiao1
Yingying Jiao1 Jiawei Zhu
Jiawei Zhu
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
BRIEF RESEARCH REPORT article
Front. Energy Res., 12 November 2021
Sec. Process and Energy Systems Engineering
Volume 9 - 2021 | https://doi.org/10.3389/fenrg.2021.781774
This article is part of the Research TopicAdvanced Technologies for Planning and Operation of Prosumer Energy SystemsView all 111 articles
The electric energy storage system (EESS) is considered as an efficient and promising tool to alleviate the power imbalance of grid-connected microgrid with distributed generation (DG). This work develops a perturbation observer-based fractional-order control (POFOC) strategy for superconducting magnetic energy storage (SMES) system. Initially, a high-gain state and perturbation observer (HGSPO) is designed for reliable estimation of the combined impact of the nonlinearities, parameter uncertainties, unmodeled dynamics, and external disturbances of SMES. Then the storage function of an SMES system is designed, which takes favorable terms into serious consideration to sufficiently utilize the physical properties of the SMES system. Moreover, a fractional-order control framework is applied for complete compensation for the estimated perturbation and adopted as the attached input to boost its dynamical responses. Furthermore, a newly proposed jellyfish search algorithm (JSA) is utilized to realize optimization and tuning of control gains of the developed strategy, upon which high-quality global optimum can be obtained to ensure prominent controlling performance. Case studies, e.g., active power and reactive power supply and system restoration capability under power grid fault effectively validate the effectiveness and reliability of the POFOC strategy compared with traditional PID control and interconnection and damping assignment passivity-based controller (IDA-PBC). In particular, the overshoot of PID is 115.264% of the rated value, while POFOC has no overshoot.
Large-scale exploitation and application of renewable energy are significant to our future energy transformation and sustainable development, thanks to their outstanding environment-friendly characteristics (Yan, 2020), which can effectively help in the global energy crisis and ecosystem deterioration (Zhang et al., 2021a). In general, distributed generation (DG) is always deemed as an insightful solution, which can satisfy the demand for both uninterrupted electricity supply and zero pollution (Yang et al., 2019a; Xi et al., 2020). Nevertheless, the inherent intermittence and randomness of DGs often lead to fluctuation of output power, which may severely threaten microgrid operation stability and reliability. Electric energy storage system (EESS) serves as a promising strategy to solve this tricky problem.
In general, EESS owns various distinctive advantages, such as boosting power supply stability and reliability with fast responses, balancing power supply and demand under low costs, enhancing power generation efficiency, and decreasing pollution emissions. EESS systems can be generally divided into two main subsystems (Yang et al., 2018; Sara et al., 2020), i.e., i) high-energy storage systems and ii) high-power storage systems. In particular, the second can be further categorized into more different types, among which one of the most representative one is superconducting magnetic energy storage (SMES) (Shi et al., 2019). It is worth noting that SMES receive vast research attention, thanks to their merits of high-energy conversion efficiency via superconductors, and also low cost and high current intensity (Yang et al., 2016). Moreover, it can also achieve rapid regulation of active power/reactive power, which is beneficial to power transfer control (Shima et al., 2018). Currently, pulse-width modulated current source converter (PWM-CSC) is extensively adopted to restrain harmonic distortion and decrease the complexity of a system component (Yang et al., 2020).
As for SMES, a critical task during its operation is the design of an appropriate control system, which is crucial to ensure that SMES can obtain optimal operation performance under various applications. Thus far, traditional linear control method, for instance, proportional-integral-derivative (PID) control is extensively utilized due to its easy implementation and satisfactory effectiveness (Yang et al., 2017). However, SMES is a typical high nonlinear system, such that control gains of PID control that are acquired via single-point linearization cannot realize a globally consistent control. Therefore, many nonlinear control strategies are proposed to solve such an obstacle. For example, in the literature (Lin et al., 2018), an energy-shaping mechanism on the basis of port-controlled Hamiltonian (PCH) models was devised for a rapid power command response. Furthermore, a fuzzy logic control was adopted by Shanchuan Wang and Jianxun Jin (2014) to boost the dynamical responses of SMES systems under different operating scenarios.
However, SMES is usually prone to various uncertainties that are caused by renewable energy stochastic features (Montoya et al., 2018; Trilochan et al., 2018; Yang et al., 2019b). To boost the robustness and response speed of SMES under various operating scenarios at the same time, a perturbation observer-based fractional-order control (POFOC) strategy is devised in this work, which combines the benefits of high-gain state perturbation observer (HGPO) and fractional-order sliding-mode control (FOC) (Montoya et al., 2018). Furthermore, a novel jellyfish search algorithm (JSA) (Chou and Truong, 2021) is adopted to realize the optimization and tuning of control gains of the developed strategy, upon which high-quality global optimum can be obtained to ensure a consistently remarkable performance. The main novelties are outlined as follows:
• System nonlinearities, parameter uncertainties, unmodeled dynamics, as well as external disturbances are combined to one perturbation. Then, an HGPO is employed to estimate the perturbation, while the controller is then adopted for complete compensation for the estimated perturbation. Therefore, the proposed POFOC control can maintain high robustness against different uncertainties.
• Due to the employed two fractional orders by POFOC, its response speed can be significantly boosted compared with PID control and damping assignment passivity-based controller (IDA-PBC). Meanwhile, the perturbation compensation mechanism can efficiently ensure that the proposed method obtains a consistently optimal global control performance.
• JSA can effectively avoid falling into local optimal solutions, which can ensure that the control gains can be properly optimized and tuned in a relatively short time.
The remaining of this paper is organized as follows: Section 2 develops the SMES system modeling. Section 3 develops the POFOC. In Section 4, the jellyfish search algorithm is described. In Section 5, the POFOC design for SMES systems is described. Comprehensive case studies are undertaken in Section 6. Last, Section 7 summarizes the main contributions of the paper.
Energy storage devices have bidirectional power regulation ability. The power response characteristics of different energy storage devices have various time scales and recycling efficiency due to their different energy storage forms. SMES is a kind of power-type energy storage device, which has the characteristics of fast-response speed and high-power grade. As one of the typical superconducting devices, SMES owns great potential to be widely used in microgrids with the continuous development of superconducting technology.
According to the literature (Espinoza and Joos, 1998; Montoya et al., 2018), the modeling of one typical SMES system is able to be expressed by:
where all the variables can be referred to in the Nomenclature, while the basic framework of PWM-CSC-based SMES system is demonstrated in Figure 1.
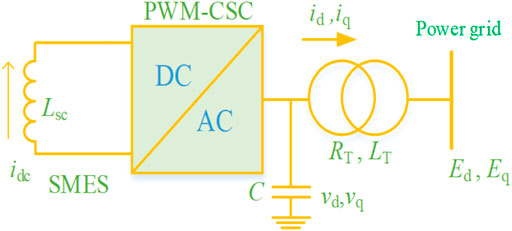
FIGURE 1. Pulse-width modulated current source converterPWM-CSC)-based superconducting magnetic energy storage (SMES) system connected to an AC power grid.
In particular,
An uncertain nonlinear system can be written in a standard form, as follows:
where
The perturbation of the system is represented by literature (Shtessel et al., 2008; Zhu et al., 2015; Elsisi et al., 2017):
where b0 denotes a control gain that is set by the users, which is a constant.
Furthermore, xn in the system is written as:
Now,
Thus,
A.1 Inequality
A.2 Perturbation
The estimation error of x is defined as
with
where observer gain
where λα represents the observer root that can ensure the convergence of the observer. Particularly,
Fractional calculus is based on integral calculus. Based on its order in the field of fractions or complex numbers, it is the traditional differential and integral unified form of expression. The process from integral to differential can be expressed as the ordered set of fractional calculus to order. Therefore, using fractional calculus instead of integer calculus can better describe the actual physical system and natural phenomena. For integer calculus, there is a relatively clear physical meaning and geometric interpretation, for example, the first derivative of a variable can be used to express the speed in the physical sense, and the second derivative is the corresponding acceleration. If many problems are described by integer derivative, then the appropriate differential equation cannot be obtained, or the obtained differential equation is not complex, and the results are not necessarily very consistent with the actual situation. However, the differential equation obtained by fractional derivative is not only very concise, but also the results obtained by fractional derivative are closer to the reality. Sometimes, a problem is complex not because it is really complex, but because no suitable method has been found. The fractional differential equation generated by fractional derivative is such a powerful tool to study complex problems. Hence, it has become a powerful tool for mathematical modeling of complicated mechanical and physical processes.
In particular, the basic operator
where
The definition of Riemann–Liouville (RL) is on the basis of Gamma function
where
In particular,
where
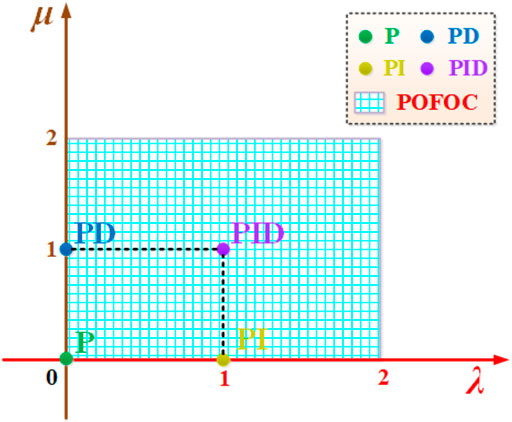
FIGURE 2. Parameter ranges for different controllers.
Thus, POFOC can be illustrated by (Wei Yao et al., 2015; Zhang et al., 2015; Xi et al., 2016; Zhang et al., 2016):
where
Jui-Sheng Chou et al. (Chou and Truong, 2021) recently proposed a JSA via emulating the predation process of jellyfish, which involves three behaviors. Figure 3 presents the steps of JSA.
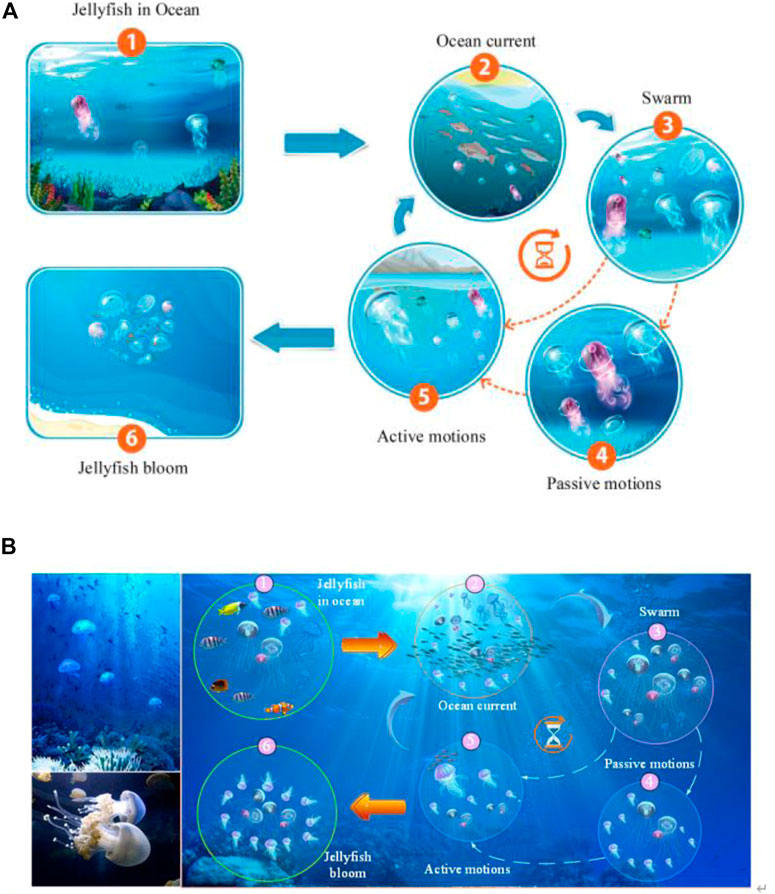
FIGURE 3. Jellyfish’s behavior in the ocean. (A) the original figure source and (B) redecorated figure with citation.
The initialization of population in JSA is conducted based on a logical graph (May 1976), which eliminates the negative effects of random initialization that are often adopted by traditional metaheuristic algorithms, e.g., low convergence rate and easy to fall into local optima due to the lack of population diversity. The JSA-based logical graph is expressed as:
where
Jellyfishes are attracted by ocean currents that contain large amounts of nutrients, which update their location according to the
where
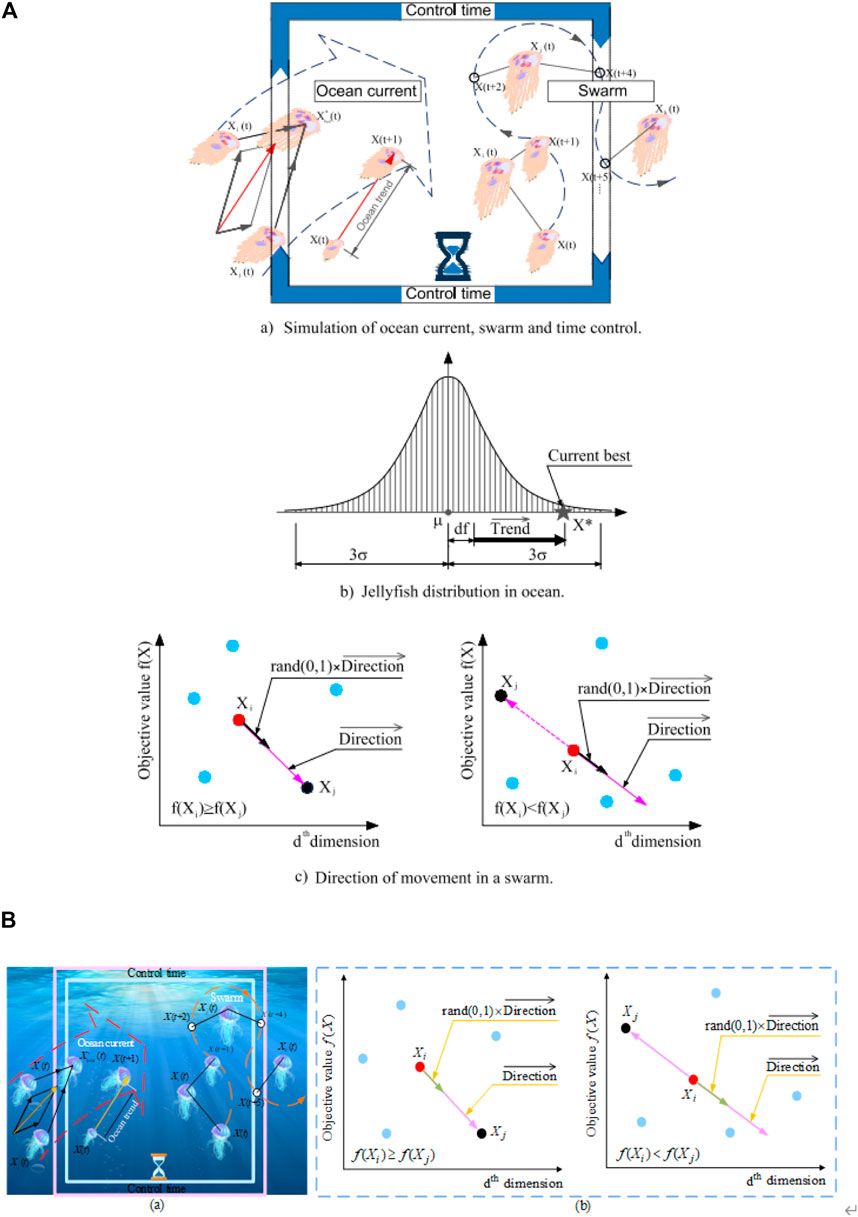
FIGURE 4. Simulation of Jellyfish behavior. (A) the original figure source and (B) redecorated figure with citation.
The movements of jellyfishes in the swarm can be segmented into two types: passive motion and active motion. The location of one specific jellyfish is updated during iterations as:
where
The active motion of jellyfishes in the swarm is determined by:
Figure 4B illustrates the direction of the movements of jellyfishes inside the swarm: jellyfishes always move toward the direction of greater food availability. The corresponding movement direction of each jellyfish is given by:
where
In JSA, the time control mechanism is adapted to govern the movements of jellyfishes following ocean currents and inside jellyfish swarm. The implementation of JSA mainly depends on the time controlling function
where k denotes the total number of iterations,
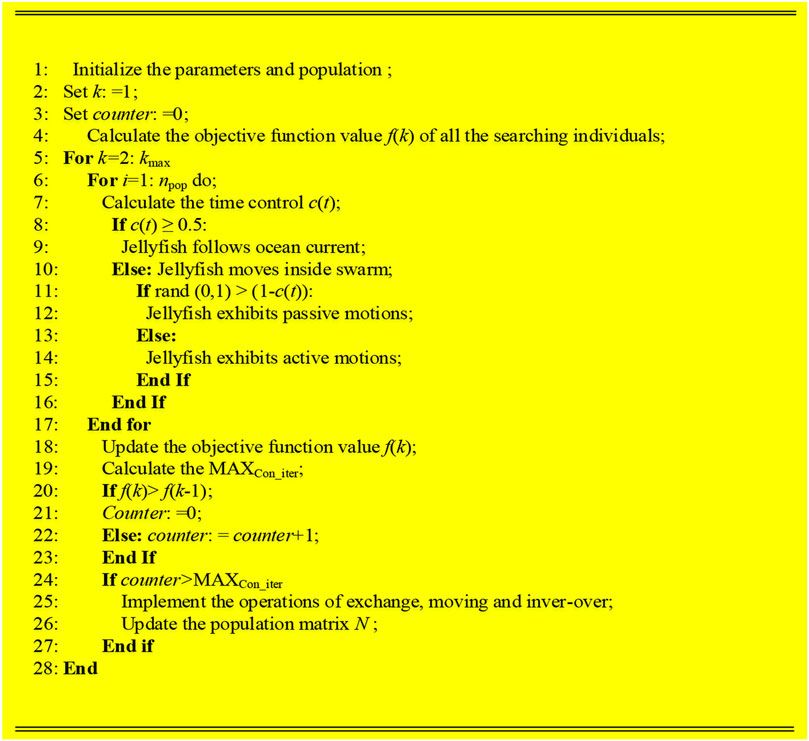
FIGURE 5. Executive procedure of jellyfish search algorithm (JSA).
Define state vector as
where
Differentiating y until u explicitly appeared, gives:
Thus, the system (Eq. 28) can be further described by a matrix, as follows:
where
with
Furthermore, to ensure that the linearization of input–output is effective, B(x) needs to be nonsingular under all the operating circumstances, e.g.,
Due to
Perturbations
Moreover, B0 can be described by:
where b11 and b22 mean constant control gains that are set by users.
Tracking error is e = [e1, e2]T = [
Therefore, a third-order HGPO is designed for the estimation of perturbation
where α11, α12, and α13 mean three positive constants, with
Besides, a third-order HGSPO is adopted to realize the estimation of perturbation
where observer gains α21, α22, and α23 are all positive constants, with
Tracking error dynamics of the POFOC method is written as:
where control gains
Then, JSA is used to optimize POFOC control gains. The optimization goal is to minimize active power and reactive power tracking errors and minimize the overall controlling cost, as follows:
Minimize F(x) =
where the weights
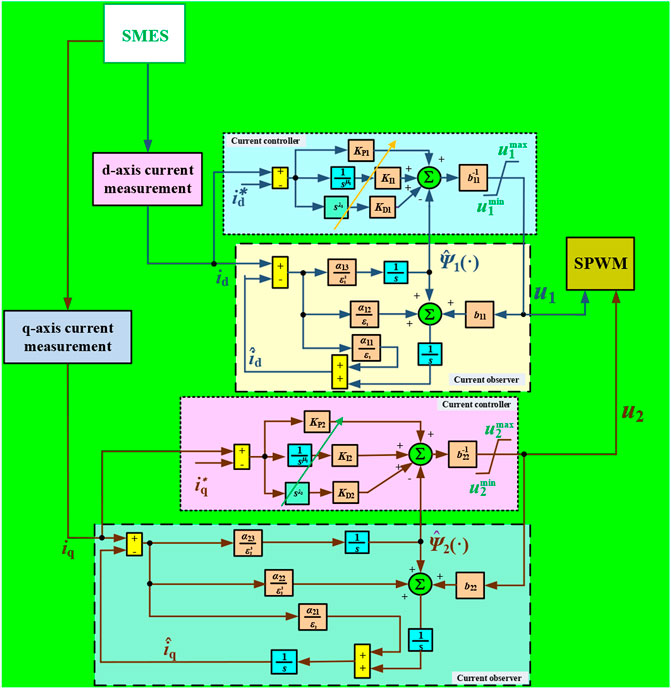
FIGURE 6. The overall control framework of a perturbation observer-based fractional-order control (POFOC).
The configuration of a typical SMES system is illustrated in Figure 7, while related parameters are specifically shown in Table 1. To testify the control performance and robustness of the POFOC strategy, it is compared against the traditional PID control and IDA-PBC under two cases. In addition, the simulation is executed on Matlab/Simulink 7.10 using a personal computer with an IntelR CoreTMi7 CPU at 2.2 GHz and 8 GB of RAM.
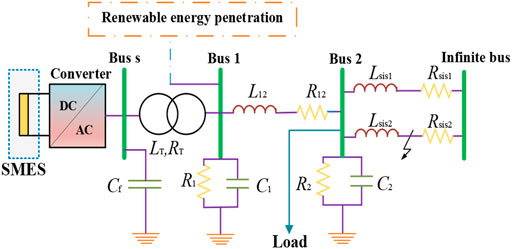
FIGURE 7. The configuration of an SMES system in a microgrid.

TABLE 1. The superconducting magnetic energy storage (SMES) system parameters and microgrid parameters.
The purpose of this case is to verify the ability to regulate the output of active power and reactive power when the system is under disturbance. In this case, the reference of power is constantly changing, and the main purpose is to track them accurately. In addition, the detailed system response is demonstrated in Figure 8, which indicates that POFOC can adjust the active power and reactive power in the shortest time, and the tracking effect is the best. In addition, serious overshoot occurs in PID control, which might lead to a decrease in the operating stability and reliability of the system. The system cannot be quickly restored to the stable state due to the slow adjustment speed of IDA-PBC.
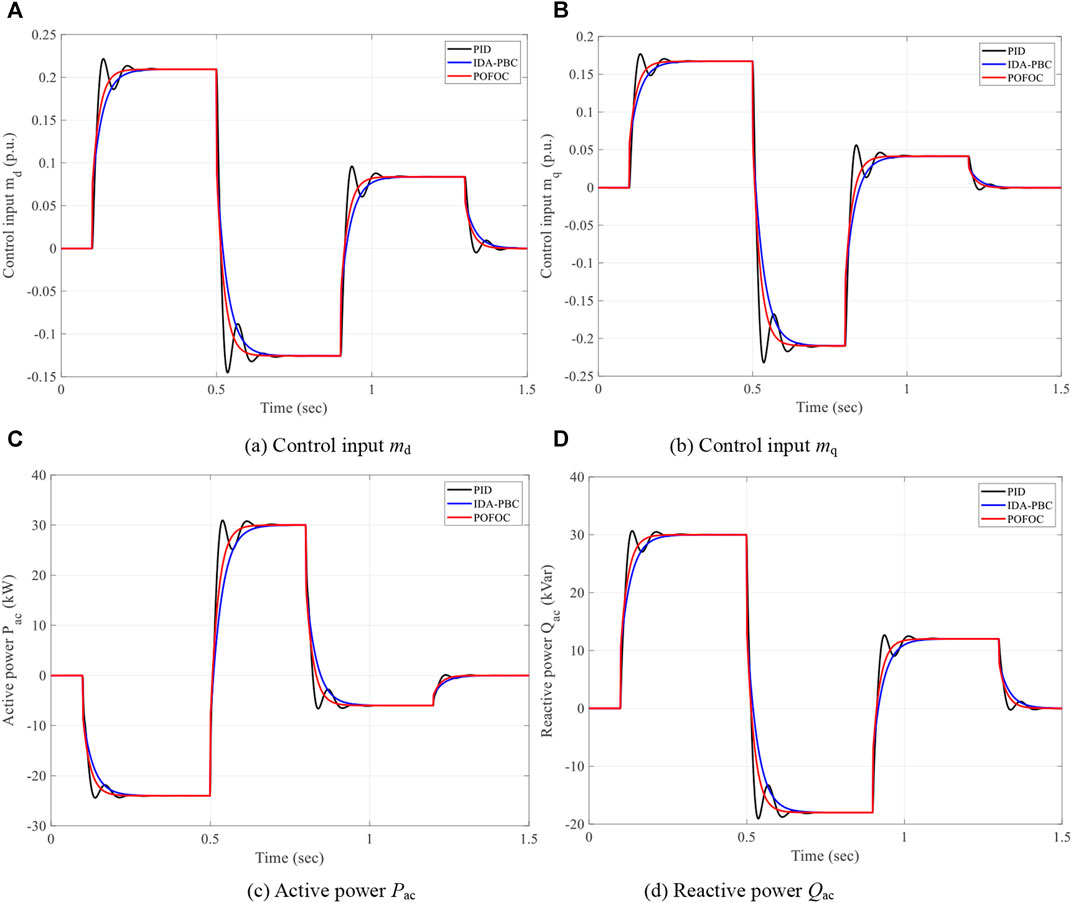
FIGURE 8. System responses under power support. (A) Control input md. (B) Control input mq. (C) Active power Pac. (D) Reactive power Qac.
This section aims to verify whether the control system can recover the disturbance system quickly and effectively. Suppose at t = 0.5 s between Bus 2 and infinite bus, there is a three-phase short-circuit fault that occurs on a transmission line. In addition, when t = 0.6 s, the fault line is disconnected, and the automatic re-closing device is turned on, and the normal supply of electric power is restored after the fault is cleared. Figure 9 shows the recovery performance achieved by various controllers when a failure happens, which indicates that POFOC can effectively and significantly mitigate power oscillations caused by faults, ensuring that unstable systems return to normal operation at the highest speed. Compared with PID control, the proposed POFOC method can always maintain a relatively stable tracking performance, and the restore speed is much faster after the fault on the transmission line.
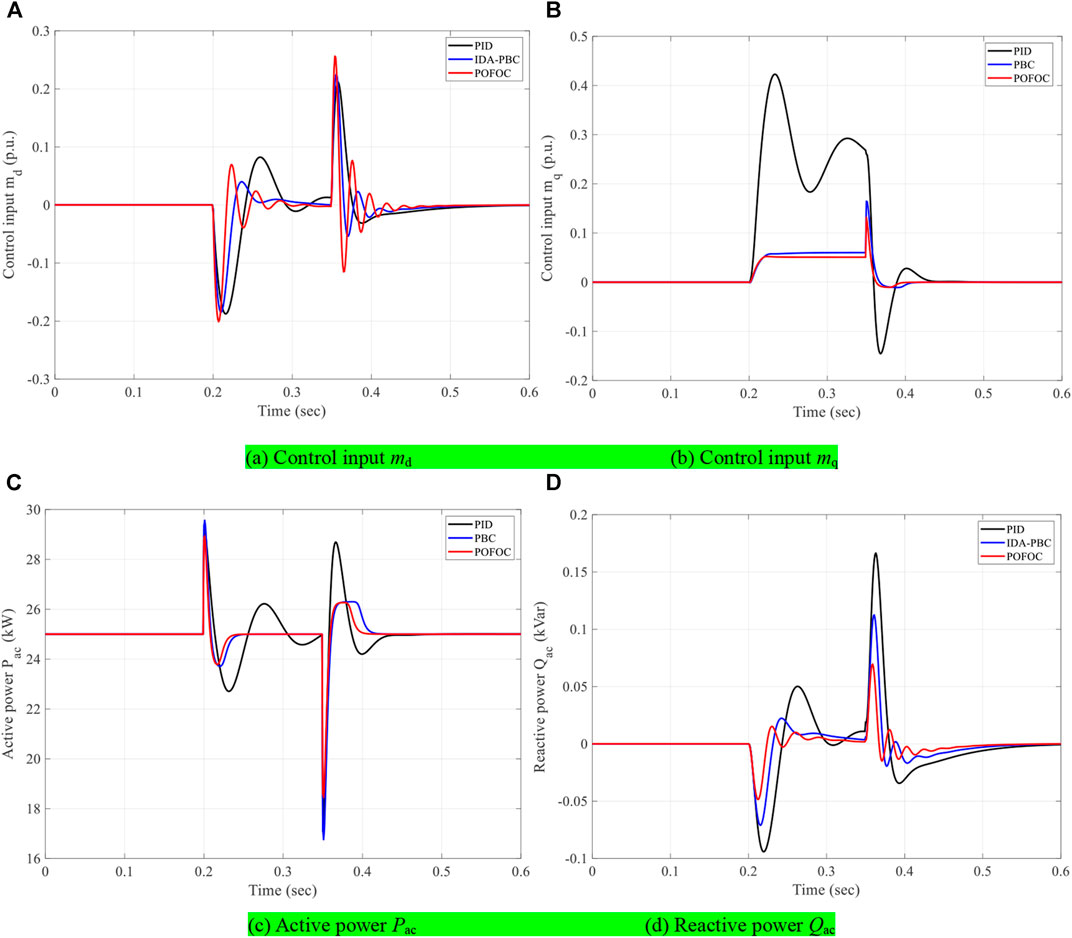
FIGURE 9. System responses under power system fault. (A) Control input md. (B) Control input mq. (C) Active power Pac. (D) Reactive power Qac.
A novel POFOC scheme combined with JSA is developed in this work for SMES systems, which main novelties are outlined as:
1) HGPO is first employed to estimate the combined impact of SMES system modeling uncertainties, unknown parameters, and external disturbances. Then, the control strategy fully compensates the estimated perturbation for consistent global control, which leads to stronger robustness.
2) A novel JSA is employed to optimize and tune the control gains based on its powerful global searching ability, which can effectively avoid the algorithm falling into local optimal solutions.
3) Case studies testify the practical performance of the proposed POFOC scheme compared against traditional PID control and IDA-PBC. Experimental results indicate that POFOC control can significantly enhance the overall control performance of SMES system in comparison with PID control in terms of tracking ability and control costs. In particular, the overshoot of PID is 115.264% of the rated value, while POFOC and IDA-PBC has no overshoot.
In future studies, a more advanced controller and algorithm will be devised to solve this problem.
The original contributions presented in the study are included in the article/Supplementary Material. Further inquiries can be directed to the corresponding author.
KL conceptualized the study, wrote and prepared the original draft, wrote, reviewed, and edited the manuscript. YJ wrote, reviewed, and edited the manuscript. JZ supervised the study and conducted the investigation.
This work is supported by the National Natural Science Foundation of China (NSFC) under grant number 61902039.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Chou, J.-S., and Truong, D.-N. (2021). A Novel Metaheuristic Optimizer Inspired by Behavior of Jellyfish in Ocean. Appl. Math. Comput. 389, 125535. doi:10.1016/j.amc.2020.125535
Elsisi, M., Soliman, M., Aboelela, M. A. S., and Mansour, W. (2017). Optimal Design of Model Predictive Control with Superconducting Magnetic Energy Storage for Load Frequency Control of Nonlinear Hydrothermal Power System Using Bat Inspired Algorithm. J. Energ. Storage 12, 311–318. doi:10.1016/j.est.2017.05.009
Espinoza, J. R., and Joos, G. (1998). State Variable Decoupling and Power Flow Control in PWM Current-Source Rectifiers. IEEE Trans. Ind. Electron. 45 (1), 78–87. doi:10.1109/41.661308
Lin, X., Lei, Y., and Zhu, Y. (2018). A Novel Superconducting Magnetic Energy Storage System Design Based on a Three-Level T-type Converter and its Energy-Shaping Control Strategy. Electric Power Syst. Res. 162, 64–73. doi:10.1016/j.epsr.2018.05.006
May, R. M. (1976). Simple Mathematical Models with Very Complicated Dynamics. Nature 261, 459–467. doi:10.1038/261459a0
Montoya, O. D., Garcés, A., and Espinosa-Pérez, G. (2018). A Generalized Passivity-Based Control Approach for Power Compensation in Distribution Systems Using Electrical Energy Storage Systems. J. Energ. Storage 16, 259–268. doi:10.1016/j.est.2018.01.018
Sara, M., Ahmed, E., Tamou, N., and Badr, B. I. (2020). NA Direct Power Control of a DFIG Based-WECS during Symmetrical Voltage Dips. Prot. Control. Mod. Power Syst. 5 (1), 36–47. doi:10.1186/s41601-019-0148-y
Shanchuan Wang, S., and Jianxun Jin, J. (2014). Design and Analysis of a Fuzzy Logic Controlled SMES System. IEEE Trans. Appl. Supercond. 24 (5), 1–5. doi:10.1109/tasc.2014.2348562
Shi, J., Xu, Y., Liao, M., Guo, S., Li, Y., Ren, L., et al. (2019). Integrated Design Method for Superconducting Magnetic Energy Storage Considering the High Frequency Pulse Width Modulation Pulse Voltage on Magnet. Appl. Energ. 248, 1–17. doi:10.1016/j.apenergy.2019.04.079
Shima, Y., Mahdi, D., and Erfan, S. (2018). Designing and Analyzing an Electric Energy Storage System Based on Reversible Solid Oxide Cells. Energ. Convers. Manage. 159, 381–395. doi:10.1016/j.enconman.2017.12.082
Shtessel, Y., Baev, S., and Biglari, H. (2008). Unity Power Factor Control in Three-phase AC/DC Boost Converter Using Sliding Modes. IEEE Trans. Ind. Electron. 55 (11), 3874–3882. doi:10.1109/tie.2008.2003203
Trilochan, P., Anup, K. P., and Sunil, K. S. (2018). Implementing Dynamic Evolution Control Approach for DC-link Voltage Regulation of Superconducting Magnetic Energy Storage System. Electr. Power Energ. Syst. 95, 275–286. doi:10.1016/j.ijepes.2017.08.022
Wei Yao, W., Lin Jiang, L., Jinyu Wen, J. Y., Qinghua Wu, Q. H., and Shijie Cheng, S. J. (2015). Wide-Area Damping Controller for Power System Interarea Oscillations: A Networked Predictive Control Approach. IEEE Trans. Contr. Syst. Technol. 23 (1), 27–36. doi:10.1109/tcst.2014.2311852
Xi, L., Wu, J., Xu, Y., and Sun, H. (2020). Automatic Generation Control Based on Multiple Neural Networks with Actor-Critic Strategy. IEEE Trans. Neural Netw. Learn. Syst. PP (6), 2483–2493. doi:10.1109/TNNLS.2020.3006080
Xi, L., Yu, T., Yang, B., Zhang, X., and Qiu, X. (2016). A Wolf Pack Hunting Strategy Based Virtual Tribes Control for Automatic Generation Control of Smart Grid. Appl. Energ. 178, 198–211. doi:10.1016/j.apenergy.2016.06.041
Yan, X. (2020). A Review of Cyber Security Risks of Power Systems: from Static to Dynamic False Data Attacks. Prot. Control. Mod. Power Syst. 5 (3), 8–19. doi:10.1186/s41601-020-00164-w
Yang, B., Jiang, L., Wang, L., Yao, W., and Wu, Q. H. (2016). Nonlinear Maximum Power point Tracking Control and Modal Analysis of DFIG Based Wind Turbine. Int. J. Electr. Power Energ. Syst. 74, 429–436. doi:10.1016/j.ijepes.2015.07.036
Yang, B., Jiang, L., Yao, W., and Wu, Q. H. (2015). Perturbation Estimation Based Coordinated Adaptive Passive Control for Multimachine Power Systems. Control. Eng. Pract. 44, 172–192. doi:10.1016/j.conengprac.2015.07.012
Yang, B., Wang, J., Zhang, X., Yu, T., Yao, W., Shu, H., et al. (2020). Comprehensive Overview of Meta-Heuristic Algorithm Applications on PV Cell Parameter Identification. Energ. Convers. Manage. 208, 112595. doi:10.1016/j.enconman.2020.112595
Yang, B., Yu, T., Shu, H., Zhang, Y., Chen, J., Sang, Y., et al. (2018). Passivity-based Sliding-Mode Control Design for Optimal Power Extraction of a PMSG Based Variable Speed Wind Turbine. Renew. Energ. 119, 577–589. doi:10.1016/j.renene.2017.12.047
Yang, B., Yu, T., Zhang, X., Li, H., Shu, H., Sang, Y., et al. (2019b). Dynamic Leader Based Collective Intelligence for Maximum Power point Tracking of PV Systems Affected by Partial Shading Condition. Energ. Convers. Manage. 179, 286–303. doi:10.1016/j.enconman.2018.10.074
Yang, B., Zhang, X., Yu, T., Shu, H., and Fang, Z. (2017). Grouped Grey Wolf Optimizer for Maximum Power point Tracking of Doubly-Fed Induction Generator Based Wind Turbine. Energ. Convers. Manage. 133, 427–443. doi:10.1016/j.enconman.2016.10.062
Yang, B., Zhong, L., Zhang, X., Shu, H., Yu, T., Li, H., et al. (2019a). Novel Bio-Inspired Memetic Salp Swarm Algorithm and Application to MPPT for PV Systems Considering Partial Shading Condition. J. Clean. Prod. 215, 1203–1222. doi:10.1016/j.jclepro.2019.01.150
Zhang, K., Zhou, B., Or, S. W., Li, C., Chung, C. Y., and Voropai, N. I. (2021a). Optimal Coordinated Control of Multi-Renewable-To-Hydrogen Production System for Hydrogen Fueling Stations. IEEE Trans. Ind. Applicat. 1. doi:10.1109/TIA.2021.3093841
Zhang, X., Tan, T., Zhou, B., Yu, T., Yang, B., and Huang, X. (2021b). Adaptive Distributed Auction-Based Algorithm for Optimal Mileage Based AGC Dispatch with High Participation of Renewable Energy. Int. J. Electr. Power Energ. Syst. 124, 106371. doi:10.1016/j.ijepes.2020.106371
Zhang, X., Yu, T., Yang, B., and Li, L. (2016). Virtual Generation Tribe Based Robust Collaborative Consensus Algorithm for Dynamic Generation Command Dispatch Optimization of Smart Grid. Energy 101, 34–51. doi:10.1016/j.energy.2016.02.009
Zhang, X., Yu, T., Yang, B., Zheng, L., and Huang, L. (2015). Approximate Ideal Multi-Objective Solution Q(λ) Learning for Optimal Carbon-Energy Combined-Flow in Multi-Energy Power Systems. Energ. Convers. Manage. 106, 543–556. doi:10.1016/j.enconman.2015.09.049
Zhu, J., Yuan, W., Qiu, M., Wei, B., Zhang, H., Chen, P., et al. (2015). Experimental Demonstration and Application Planning of High Temperature Superconducting Energy Storage System for Renewable Power Grids. Appl. Energ. 137, 692–698. doi:10.1016/j.apenergy.2014.07.022
Ed d-axis voltage of AC equivalent node
Eq q-axis voltage of AC equivalent node
id d-axis current flowing across the transformer
iq q-axis current flowing across the transformer
vd d-axis voltage at PWM-CSC terminal
vq q-axis voltage at PWM-CSC terminal
idc DC current flowing across superconducting coil
md d-axis modulation indicatrix
mq q-axis modulation indicatrix
Pac active power
Qac reactive power
ςi, φiλci (i = 1,2) controller gains
αij, kij (i = 1,2; j = 1,2,3) observer gains
C capacitor used as low-pass filter
Lsc inductance of superconducting coil device
LT inductance of transformer
RT resistance of transformer
SMES superconductor magnetics energy storage
DG distributed generation
FOSMC fractional-order SMC
AFOSMC adaptive fractional-order SMC
PID proportional-integral-derivative
SMSPO sliding-mode state and perturbation observer
PWM-CSC pulse-width modulated current source converter
HIL hardware-in-the-loop
IDA-PBC interconnection and damping assignment passivity-based control
JSA jellyfish search algorithm
EESS electric energy storage systems
SCES super-capacitor energy storage
FWES super-capacitor energy storage
HESS hybrid energy storage system
TES thermal energy system
CAES compressed air energy system
PHES pumped hydroelectric energy storage
PCU power converter unit
PCC point of common coupling
PCH port-controlled Hamiltonian
MPC model predictive control
PO perturbation observer
PERSFC perturbation estimation based robust state feedback control
DFIG doubly-fed induction generator
PoFoPID perturbation observer based fractional-order PID
Keywords: superconducting magnetic energy storage systems, distributed generation, fractional-order control, jellyfish search algorithm, perturbation observer
Citation: Luo K, Jiao Y and Zhu J (2021) Perturbation Observer Based Fractional-Order Control for SMES Systems Based on Jellyfish Search Algorithm. Front. Energy Res. 9:781774. doi: 10.3389/fenrg.2021.781774
Received: 23 September 2021; Accepted: 11 October 2021;
Published: 12 November 2021.
Edited by:
Bin Zhou, Hunan University, ChinaReviewed by:
Yixuan Chen, The University of Hong Kong, Hong Kong SAR, ChinaCopyright © 2021 Luo, Jiao and Zhu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Jiawei Zhu, amlhd2VpLnpodUBjaGQuZWR1LmNu
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.