 Yan Geng1,2
Yan Geng1,2 Jianwei Ji
Jianwei Ji- 1College of Information and Electrical Engineering, Shenyang Agricultural University, Shenyang, China
- 2Liaoning Provincial College of Communications, Shenyang, China
In this paper, the output consensus problem of DC microgrids with dynamic event-triggered control scheme is investigated. According to the properties of DC microgrids and multi-agent systems, the multi-agent systems function model for DC microgrids is provided. For making the multi-agent systems achieve output consensus, the non-periodic and periodic dynamic event-triggered control schemes are provided, respectively, which are classified according to the style of receiving information. By using a series of analysis, it can be proved that these two control schemes not only can make systems achieve output consensus, but also can avoid the Zeno-behavior successfully. Moreover, the periodic dynamic event-triggered control scheme does not need the continuous information transfer. Finally, a numerical example is provided to support our conclusions.
1 Introduction
With the rapid development of national economy, the problems of non-renewable energy and
For designing the proper control schemes of DC microgrids, the systems function modeling of DC microgrids is very important. In (Purba et al., 2019), the scalable models for DC microgrids with limited computational complexity was provided and the dynamic characteristics was analyzed, too. Moreover, the state-space function model of the converters with plug-and-play (PnP) regulator and
The function model of multi-agent systems has attracted lots of attentions due to its widely applications in many aspects (Bender, 1991; Cai et al., 2016; Lawton and Beard, 2002). Among all these issues about multi-agent systems, the consensus problem for multi-agent systems is the most basic and quite important, which attracted large scholars to investigate. In (Fax and Murray, 2004), the topology structure representing the information transfer between agents was analyzed and the decision conditions of making multi-agent systems achieve consensus was also provided. In (Olfati-Saber and Murray, 2004) and (Savino et al., 2016), the consensus problem of multi-agent systems with directed topology and switching topology were studied, which further reduced the amount of information transfer. After that, in order to make multi-agent systems be more fit for the actual situation, the heterogeneous multi-agent systems that can make the agents’ system function models be different was pointed out. In (Franceschelli et al., 2010), the consensus problem for one special kind of heterogeneous multi-agent systems was investigated, which had only two different kinds of dynamic models. Then, the dynamic compensator was built for each agent to deal with the output consensus problem of general heterogeneous multi-agent systems in (Zhang et al., 2017) and (Huang and Ye, 2014).
Traditional control schemes for multi-agent systems always require that both information transfer and the update of controller should be continuous, which may cause the congestion of information and the cost of energy if the amount of agents is large enough. For overcoming this problem, the periodic sampling control scheme was proposed and used for the multi-agent systems in (Fridman, 2010; Liu and Fridman, 2012; Shen et al., 2012) which can give a fixed sampling periodic making the information communications and controller’s update occur at the periodic sampled instant. Nevertheless, this scheme only considered the ‘worst situation’, which leaded to the increase of conservativeness in the choice of sampled instant. Considering about this problem, the event-triggered control scheme making the controller’s update occur at the triggered time according to the agents’ behavior was investigated and used for multi-agent systems in (Zhu et al., 2014; Duan et al., 2017; Zhang et al., 2017). In (Zhu et al., 2014), the event-triggered control scheme was proposed to solve the consensus problem for linear multi-agent with directed topology. Moreover, the corresponding event-triggered control approaches for solving consensus problems of multi-agent systems with special models such as nonlinear and heterogeneous were provided in (Seifullaev and Fradkov, 2016) and (Duan et al., 2017), respectively.
Although the event-triggered control schemes for multi-agent systems have been investigated by many papers and achieved significant results, some points still need to be improved: 1) How to avoid the Zeno-behavior is one of the key problem for event-triggered control scheme. However, most existing works only can avoid this phenomenon before consensus, while a fixed minimum triggered interval can not be given. 2) Compare with periodic sampling control scheme, the frequency of controller’s update by using event-triggered control scheme is lower. However, because of the existing of event-triggered conditions, the continuous information transfer is always needed, which may cause the information congestion. These problems motivate us to provide this paper.
In this paper, the output consensus problem for the multi-agent systems function model of DC microgrids is investigated and the corresponding dynamic event-triggered control schemes are provided, respectively. The main contributions of this paper are given as follows:
1) According to the relevant knowledge of DC microgrids and multi-agent systems, the multi-agent systems function model of DC microgrids is built. Moreover, by utilizing this model, the control problem for DC microgrids is converted into the output consensus problem of multi-agent systems.
2) For the multi-agent systems built in this paper, the non-periodic and periodic dynamic event-triggered control schemes for achieving output consensus are provided, respectively. Compare with traditional event-triggered control scheme, these two control schemes can provide the fixed minimum triggered interval, and may have the lower conservativeness event-triggered conditions because of the existing of dynamic item. Moreover, the periodic dynamic event-triggered control scheme can also avoid the continuous information transfer.
The rest of this paper is organized as follows. In section 2, the preliminaries is given. The multi-agent systems function model of DC microgrids is provided in section 3. In section 4, the dynamic event-triggered control schemes with non-periodic and periodic event-triggered conditions are proposed, respectively. The numerical example supporting for our results is provided in section 5 and the conclusion is given in section 6.
2 Preliminaries
2.1 Notations
1) Denote
2) Denote
3) Denote
4) Denote
5)
6) Denote
2.2 Algebraic Graph Topology
Consider a system consist of one leader and
Define
Lemma 1 (Fax and Murray, 2004) If a directed spanning tree with the leader as the root exists in the graph topology,
3 The Multi-Agent Systems Function Modeling of DC Microgrids
According to (Wang et al., 2021), the typical structure of DC microgrids with wind and solar energy generators is shown in Figure 1, where agent
where
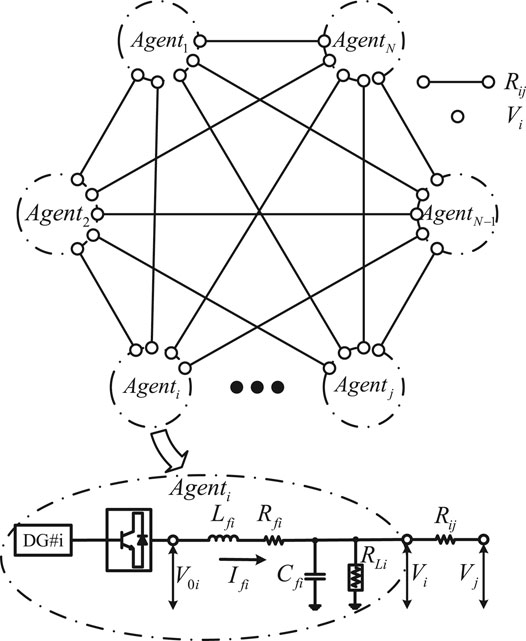
FIGURE 1. The typical structure of DC microgrids.
According to (1) and (2), the further systems function model of DC microgrids can be obtained. Take
Since
where
Such that
for
Therefore, the multi-agent systems function model of DC microgrid has been built by 5–8, where (5), (6) and (7), (8) represent the leader and agent systems, respectively. In the rest of this paper, the main purpose is to provide the control scheme making multi-agent systems 5–8 achieve output consensus.
4 Dynamic Event-Triggered Control Scheme for DC Microgird
4.1 The Design of Controller
For systems (5)–(8), assume that the following condition is satisfied in this paper.
Assumption 1 For
Let
Assumption 2 There exists a directed spanning tree with the leader as the root in topology
For
4.2 The Design of Dynamic Event-Triggered Condition
Consider Assumptions one to two hold and the control protocol for systems (5)–(8) is (10), (11), the following conclusion can be given.
Proposition 1 Systems (5)–(8) can achieve output consensus with control protocol (10), (11) if the following systems
such that
for
Proof. Take
Therefore, we have
Remark 1 According to the proof of Proposition 1, it is important to make Assumptions 1 and 2 be true. Specially, the existence of Assumption 1 makes each agent can obtain the information of leader directly or indirectly, which is a necessary condition of achieving output consensus. On the other hand, the existence of Assumption 2 makes output consensus problem of systems (5)–(8) can be turned into the stable problem of system (12), which is a necessary condition of using dynamic compensator to transfer information.According to Proposition one and some existing results, for making systems (5)–(8) achieve output consensus, assume that the following condition holds.
Assumption 3 There exists matrices
where
4.2.1 Non-periodic Dynamic Event-Triggered Condition
Consider that the triggered time
where.
Furthermore,
According to event-triggered condition (15), the following result can be obtained.
Theorem 1 Assume that Assumptions 1–3 hold, systems (5)–(8) can achieve output consensus with control protocol (10), (11) and event-triggered condition (15) if
where
Proof Set
According to (16)–(18), We Have
Since
where
Denote
where
where
By simple analysis, there exist
Remark 2 Because of the existence of
Remark 3
Remark 4 Compare with the static event-triggered condition, the most obvious difference of dynamic event-triggered condition (15) is the existence of dynamic item
4.2.2 Periodic Dynamic Event-Triggered Condition
Consider that the triggered time
where
Moreover,
According to event-triggered condition (37), the following conclusion can be given.
Theorem 2 Assume that Assumptions 1–3 hold, systems (5)–(8) can achieve output consensus with control protocol (10), (11) and event-triggered condition (37) if
where
Proof According to (38), (39), the following results can obtained.
Since
Therefore, the following conclusion can be given.
where
Remark 5 In this paper, event-triggered condition (37) is called periodic dynamic event-triggered condition because it combines periodic sampling condition with dynamic event-triggered condition. More specifically, event-triggered condition (37) makes the controller of each agent receive the systems’ information at the fixed periodic sampling instant (
Remark 6 As we know, the differences between linear and nonlinear systems are huge. Therefore, it is difficult to extend the control algorithm for linear system to the nonlinear system directly. More specifically, take this paper as an example: In this paper, the information of dynamic item
5 Numerical Example
Consider systems (5)–(8) with the topology structure shown in Figure 2 and the parameters given as follows:
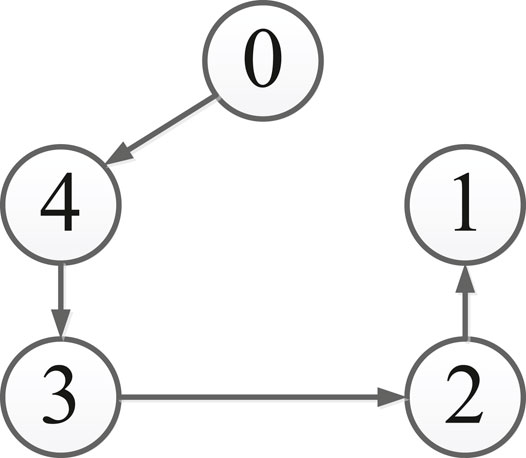
FIGURE 2. Topology structure of network.
For satisfying Assumption 3,
Then, the non-periodic and periodic dynamic event-triggered conditions can be given as follows:
1) Non-periodic dynamic event-triggered scheme: According to Theorem 1, the parameters of condition 15) can be given as
2) Periodic dynamic event-triggered scheme: According to Theorem 2, the parameters of condition (37) can be given as
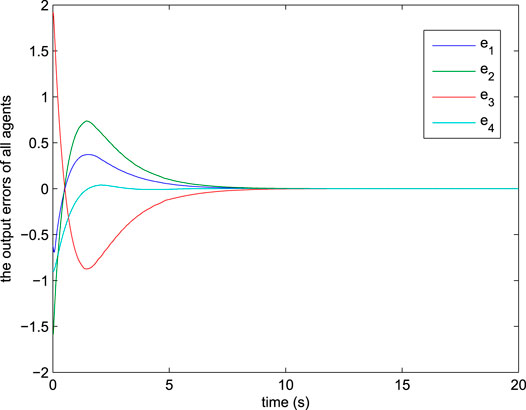
FIGURE 3. The output error between agent
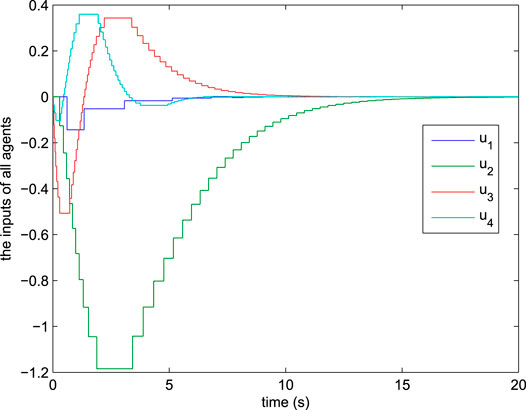
FIGURE 4. The inputs of all agents with event-triggered condition (15).
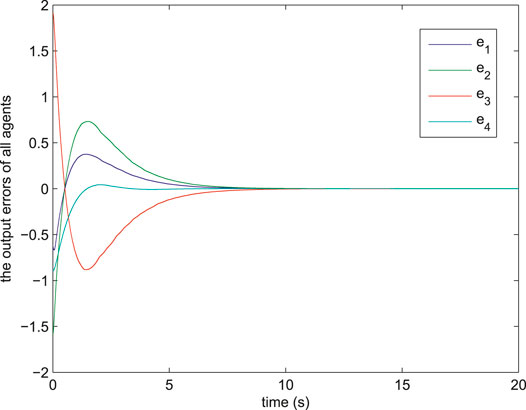
FIGURE 5. The output error between agent
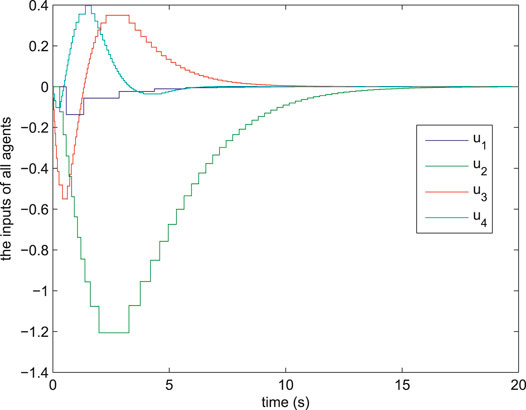
FIGURE 6. The inputs of all agents with event-triggered condition (37).
Remark 7 According to Figures 4, 6, compared with condition (37), the number of triggered times with condition (15) is much lower. This phenomenon is due to the differences between these two conditions. More specifically, condition (15) receive the continuous information while condition (37) only receive the information at the fixed periodic sampling instant. For avoiding the continuous information transfer, the conservativeness of condition (37) is higher than condition (15) for making up the lack of information transfer, which leads to the results that the frequency of trigger with condition (37) is higher.
6 Conclusion
In this paper, we have studied the output consensus problem of DC microgrids with dynamic event-triggered control scheme. By using the relevant knowledge of DC microgrids and multi-agent systems, and some existing results, the multi-agent systems function model for DC microgrids has been built. Then, for this system function model, the non-periodic and periodic dynamic event-triggered control scheme have been provided, respectively. By a series of analysis and the support of numerical example, it can be proved that these two control schemes both can make system achieve output consensus and avoid the Zeno-behavior successfully. Moreover, the periodic dynamic event-triggered control scheme can also avoid the continuous information transfer of system.
Data Availability Statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author Contributions
YG and JJ contributed to conception and design of the study. BH organized the database and performed the statistical analysis.
Funding
The National Natural Science Foundation of China (61372195).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (61372195) and College of Information and Electrical Engineering, Shenyang Agricultural University, and Liaoning Provincial College of Communications.
References
Aluisio, B., Dicorato, M., Forte, G., and Trovato, M. (2017). An Optimization Procedure for Microgrid Day-Ahead Operation in the Presence of CHP Facilities. Sustainable Energ. Grids Networks 11, 34–45. doi:10.1016/j.segan.2017.07.003
Aquila, G., Queiroz, A. R., Lima, L. M. M., Balestrassi, P. P., Lima, J. W. M., and Pamplona, E. O. (2020). Modelling and Design of Wind‐solar Hybrid Generation Projects in Long‐term Energy Auctions: a Multi‐objective Optimisation Approach. IET Renew. Power Generation 14 (14), 2612–2619. doi:10.1049/iet-rpg.2020.0185
Bender, J. G. (1991). An Overview of Systems Studies of Automated Highway Systems. IEEE Trans. Veh. Technol. 40 (1), 82–99. doi:10.1109/25.69977
Cai, Y., Tang, Z., Ding, Y., and Qian, B. (2016). Theory and Application of Multi-Robot Service-Oriented Architecture. Ieee/caa J. Autom. Sinica 3 (1), 15–25. doi:10.1109/jas.2016.7373758
Duan, M.-M., Liu, C.-L., and Liu, F. (2017). Event-triggered Consensus Seeking of Heterogeneous First-Order Agents with Input Delay. IEEE Access 5, 5215–5223. doi:10.1109/access.2017.2696026
Fax, J. A., and Murray, R. M. (2004). Information Flow and Cooperative Control of Vehicle Formations. IEEE Trans. Automat. Contr. 49 (9), 1465–1476. doi:10.1109/tac.2004.834433
Franceschelli, M., Gasparri, A., Giua, A., and Ulivi, G. (2010). Decentralized Stabilization of Heterogeneous Linear Multi-Agent Systems. IEEE Int. Conf. Robotics Automation, 3556–3561. doi:10.1109/robot.2010.5509637
Fridman, E. (2010). A Refined Input Delay Approach to Sampled-Data Control. Automatica 46, 421–427. doi:10.1016/j.automatica.2009.11.017
Ge, X., and Han, Q.-L. (2017). Distributed Formation Control of Networked Multi-Agent Systems Using a Dynamic Event-Triggered Communication Mechanism. IEEE Trans. Ind. Electron. 64 (10), 8118–8127. doi:10.1109/tie.2017.2701778
Hu, X., Ma, D., Zheng, J., Zhang, H., and Wang, R. (2020). An Operation State Analysis Method for Integrated Energy System Based on Correlation Information Adversarial Learning. Acta Automatica Sinica 46 (9), 1783–1797. doi:10.16383/j.aas.c200171
Huang, C., and Ye, X. (2014). Cooperative Output Regulation of Heterogeneous Multi-Agent Systems: An $H_{\infty}$ Criterion. IEEE Trans. Automat. Contr. 59 (1), 267–273. doi:10.1109/tac.2013.2272133
Kong, X., Liu, X., Ma, L., and Lee, K. Y. (2019). Hierarchical Distributed Model Predictive Control of Standalone Wind/solar/battery Power System. IEEE Trans. Syst. Man. Cybern, Syst. 49 (8), 1570–1581. doi:10.1109/tsmc.2019.2897646
Lawton, J. R., and Beard, R. W. (2002). Synchronized Multiple Spacecraft Rotations. Automatica 38 (8), 1359–1364. doi:10.1016/s0005-1098(02)00025-0
Liu, K., and Fridman, E. (2012). Wirtinger's Inequality and Lyapunov-Based Sampled-Data Stabilization. Automatica 48, 102–108. doi:10.1016/j.automatica.2011.09.029
Liu, Z., Liu, R., Zhang, X., Su, M., Sun, Y., Han, H., et al. (2020). Feasible Power-Flow Solution Analysis of DC Microgrids under Droop Control. IEEE Trans. Smart Grid 11 (4), 2771–2781. doi:10.1109/tsg.2020.2967353
Liu, Z., Su, M., Sun, Y., Yuan, W., Han, H., and Feng, J. (2018). Existence and Stability of Equilibrium of DC Microgrid with Constant Power Loads. IEEE Trans. Power Syst. 33 (6), 6999–7010. doi:10.1109/tpwrs.2018.2849974
Ma, G., Xu, G., Chen, Y., and Ju, R. (2017). Multi‐objective Optimal Configuration Method for a Standalone Wind-Solar-Battery Hybrid Power System. IET Renew. Power Generation 11 (1), 194–202. doi:10.1049/iet-rpg.2016.0646
Olfati-Saber, R., and Murray, R. (2004). Consensus Problems in Networks of Agents with Switching Topology and Time-Delays. IEEE Trans. Automatic Control. 49 (4), 1520–1533. doi:10.1109/tac.2004.834113
Purba, V., Johnson, B. B., Rodriguez, M., Jafarpour, S., Bullo, F., and Dhople, S. V. (2019). Reduced-order Aggregate Model for Parallel-Connected Single-phase Inverters. IEEE Trans. Energ. Convers. 34 (2), 824–837. doi:10.1109/tec.2018.2881710
Savino, H. J., dos Santos, C. R. P., Souza, F. O., Pimenta, L. C. A., de Oliveira, M., and Palhares, R. M. (2016). Conditions for Consensus of Multi-Agent Systems with Time-Delays and Uncertain Switching Topology. IEEE Trans. Ind. Electron. 63 (2), 1258–1267. doi:10.1109/tie.2015.2504043
Schfer, B., Beck, C., Aihara, K., Witthaut, D., and Timme, M. (2018). Non-gaussian Power Grid Frequency Fluctuations Characterized by Levy-Stable Laws and Superstatistics. Nat. Energ. 3, 119–126.
Seifullaev, R. E., and Fradkov, A. L. (2016). Event-Triggered Control of Sampled-Data Nonlinear Systems**This Work Was Supported by Saint Petersburg State University, (grant 6.38.230.2015) and by Government of Russian Federation, Grant 074-U01. The Lyapunov-Krasovskii Functional Based Analysis of Closed-Loop Switched System Was Performed in IPME RAS under Support of Russian Science Foundation (grant 14-29-00142). IFAC-PapersOnLine. 49 (14), 12–17. doi:10.1016/j.ifacol.2016.07.965
Shen, B., Wang, Z., and Liu, X. (2012). Sampled-data Synchronization Control of Dynamical Networks with Stochastic Sampling. IEEE Trans. Automat. Contr. 57 (10), 2644–2650. doi:10.1109/tac.2012.2190179
Su, M., Liu, Z., Sun, Y., Han, H., and Hou, X. (2018). Stability Analysis and Stabilization Methods of DC Microgrid with Multiple Parallel-Connected DC-DC Converters Loaded by CPLs. IEEE Trans. Smart Grid 9 (1), 132–142. doi:10.1109/tsg.2016.2546551
Wang, R., Sun, Q., Tu, P., Xiao, J., Gui, Y., and Wang, P. (2021). Reduced-order Aggregate Model for Large-Scale Converters with Inhomogeneous Initial Conditions in DC Microgrids. IEEE Trans. Energ. Convers. 36, 2473–2484. doi:10.1109/TEC.2021.3050434
Wang, Y., Zheng, W. X., and Zhang, H. (2017). Dynamic Event-Based Control of Nonlinear Stochastic Systems. IEEE Trans. Automat. Contr. 62 (12), 6544–6551. doi:10.1109/tac.2017.2707520
Zhang, H., Han, J., Wang, Y., and Jiang, H. (2019). $H_\infty$ Consensus for Linear Heterogeneous Multiagent Systems Based on Event-Triggered Output Feedback Control Scheme. IEEE Trans. Cybern. 49 (6), 2268–2279. doi:10.1109/tcyb.2018.2823362
Zhang, H., Liang, H., Wang, Z., and Feng, T. (2017). Optimal Output Regulation for Heterogeneous Multiagent Systems via Adaptive Dynamic Programming. IEEE Trans. Neural Netw. Learn. Syst. 28 (1), 18–29. doi:10.1109/tnnls.2015.2499757
Zhang, X., Karady, G. G., and Ariaratnam, S. T. (2014). Optimal Allocation of CHP-Based Distributed Generation on Urban Energy Distribution Networks. IEEE Trans. Sustain. Energ. 5 (1), 246–253. doi:10.1109/tste.2013.2278693
Zhou, J., Xu, Y., Sun, H., Wang, L., and Chow, M.-Y. (2020). Distributed Event-Triggered $H_\infty$ Consensus Based Current Sharing Control of DC Microgrids Considering Uncertainties. IEEE Trans. Ind. Inf. 16 (12), 7413–7425. doi:10.1109/tii.2019.2961151
Keywords: DC microgrids, output consensus, multi-agent systems, dynamic event-triggered control, periodic event-triggered control
Citation: Geng Y, Ji J and Hu B (2021) The Output Consensus Problem of DC Microgrids With Dynamic Event-Triggered Control Scheme. Front. Energy Res. 9:730850. doi: 10.3389/fenrg.2021.730850
Received: 25 June 2021; Accepted: 31 July 2021;
Published: 15 September 2021.
Edited by:
Ying Li, Zhejiang University, ChinaReviewed by:
Xinhao Che, Dalian University of Technology, ChinaJingwei Hu, Northeastern University, China
Mingyang Lu, The University of Manchester, United Kingdom
Copyright © 2021 Geng, Ji and Hu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Jianwei Ji, amp3QHN5YXUuZWR1LmNu