 Wei Liu
Wei Liu Ziduo Hu1,2
Ziduo Hu1,2- 1Research Institute of Petroleum Exploration and Development-Northwest, PetroChina, Lanzhou, China
- 2Key Laboratory of Petroleum Resources of CNPC, Lanzhou, China
- 3Tarim Oilfield Company, PetroChina, Korla, China
For the conventional staggered-grid finite-difference scheme (C-SFD), although the spatial finite-difference (FD) operator can reach 2Mth-order accuracy, the FD discrete wave equation is the only second-order accuracy, leading to low modeling accuracy and poor stability. We proposed a new mixed staggered-grid finite-difference scheme (M-SFD) by constructing the spatial FD operator using axial and off-axial grid points jointly to approximate the first-order spatial partial derivative. This scheme is suitable for modeling the stress–velocity acoustic and elastic wave equation. Then, based on the time–space domain dispersion relation and the Taylor series expansion, we derived the analytical expression of the FD coefficients. Theoretically, the FD discrete acoustic wave equation and P- or S-wave in the FD discrete elastic wave equation given by M-SFD can reach the arbitrary even-order accuracy. For acoustic wave modeling, with almost identical computational costs, M-SFD can achieve higher modeling accuracy than C-SFD. Moreover, with a larger time step used in M-SFD than that used in C-SFD, M-SFD can achieve higher computational efficiency and reach higher modeling accuracy. For elastic wave simulation, compared to C-SFD, M-SFD can obtain higher modeling accuracy with almost the same computational efficiency when the FD coefficients are calculated based on the S-wave time–space domain dispersion relation. Solving the split elastic wave equation with M-SFD can further improve the modeling accuracy but will decrease the efficiency and increase the memory usage as well. Stability analysis shows that M-SFD has better stability than C-SFD for both acoustic and elastic wave simulations. Applying M-SFD to reverse time migration (RTM), the imaging artifacts caused by the numerical dispersion are effectively eliminated, which improves the imaging accuracy and resolution of deep formation.
1 Introduction
Wave equation simulation is an important technique to study the characteristics of seismic waves in complex media (Carcione, 2015; Cao and Chen, 2018), and a key kernel in reverse time migration (RTM) (Virieux et al., 2011; Berkhout, 2014) and full waveform inversion (FWI) (Pratt et al., 1998; Virieux and Operto, 2009). Compared to the pseudo-spectral method (Reshef et al., 1988; Mittet, 2021) and finite-element method (Marfurt, 1984; Moczo et al., 2010; Moczo et al., 2011), the finite-difference (FD) method has the advantage of high computational efficiency, small memory occupation and easy implementation (Alford et al., 1974; Mulder, 2017). Hence, the FD method has become the most widely used numerical method for wave propagation simulation (Alterman and Karal, 1968; Chen et al., 2021). However, the inherent numerical dispersion in FD methods seriously affects the modeling accuracy (Alford et al., 1974; Dablain, 1986) and leads to an adverse impact on RTM and FWI results (Ren et al., 2021). So suppressing the numerical dispersion to improve the modeling accuracy is an important issue for the FD method.
Dablain (1986) pointed out that approximating the temporal and spatial partial derivatives with high-order FD operators can reduce the numerical dispersion. Unfortunately, the temporal high-order FD operator significantly increases the amount of computation and decreases the stability. Hence, conventional FD (C-FD) and staggered-grid FD (C-SFD) commonly adopt temporal second-order and spatial 2Mth-order FD operators (Fornberg, 1988). With the FD coefficients calculated based on the space domain dispersion relation and Taylor series expansion (TE), the spatial FD operators in C-FD and C-SFD can achieve 2Mth-order accuracy, but the FD discrete wave equations are still only second-order accuracy (Liu and Sen, 2009). However, wave equation simulation is implemented by solving the FD discrete wave equation iteratively. So in order to improve the modeling accuracy, we should try to increase the accuracy of the FD discrete wave equation rather than improve separately the accuracy of the temporal and spatial FD operators. Liu and Sen (2009; 2011) proposed to calculate the FD coefficients of C-FD and C-SFD based on the time–space domain dispersion relation and TE, which makes the 2D and 3D FD discrete wave equations reach 2Mth-order accuracy along 8 and 48 propagation directions respectively, but the accuracy is still second-order along with the rest of the directions. In addition to the aforementioned TE methods, the least squares (LS) methods are also widely adopted for computing the FD coefficients by minimizing the error of dispersion relation, phase velocity, or group velocity (Geller and Takeuchi, 1998; Chu and Stoffa, 2012). The LS methods usually improve the accuracy of wavefield components in the medium-high frequency band but decays some accuracy of the low-frequency component. Liu (2013; 2014) found that by minimizing the relative error instead of the absolute error of space domain or time-space domain dispersion relation, the global optimal solution can be obtained without iterations.
In addition to ameliorating the method for computing the FD coefficients, constructing a more reasonable FD stencil is another important way to improve the modeling accuracy. For the 2D scalar wave equation, Liu and Sen (2013) developed a rhombus FD scheme. The FD discrete wave equation can reach 2Mth-order accuracy along with all propagation directions with the FD coefficients calculated based on the time-space domain dispersion relation. However, the length of the spatial FD operator increases rapidly with M, which makes it very computationally expensive. Wang et al. (2016) proposed an FD scheme by combining the C-FD and rhombus FD schemes, which balanced the accuracy and efficiency. Motivated by the widely used mixed-grid FD scheme in the frequency domain (Jo et al., 1996; Shin and Sohn, 1998), Hu et al. (2016) proposed a mixed-grid FD scheme for 2D scalar wave equation modeling in the time–space domain. The basic idea of Hu et al. (2016) is to express the Laplace FD operator as the weighted mean of the Laplace FD operators constructed in the general and rotated Cartesian coordinate system. The resulting mixed-grid FD scheme is similar to that of Wang et al. (2016). Hu et al. (2021) derived how to construct a 3D Laplace FD operator with the off-axial grid points and further proposed a 3D mixed-grid FD scheme, which improved the accuracy and stability of 3D scalar wave equation simulation. For the stress–velocity acoustic wave equation, Tan and Huang (2014) constructed a spatial FD operator with the axial and off-axial grid points to approximate the first-order spatial partial derivatives and developed a mixed staggered-grid FD scheme (M-SFD). This M-SFD can make the FD discrete acoustic wave equation reach fourth or sixth-order accuracy. Ren and Li (2017) extended the method of Tan and Huang (2014) to elastic wave simulation, and the accuracy of P- or S-wave in the FD discrete elastic wave equation can be up to eighth-order. However, in the M-SFD of Tan and Huang (2014) and Ren and Li (2017), two sets of off-axial grid points with different distance to the center of the spatial FD operator are sometimes assigned the same FD coefficient, which is unreasonable and makes derivation of the analytic expression of the FD coefficients too difficult.
For simulation of the stress-velocity acoustic and elastic wave equation, we intended to develop a modified M-SFD by ensuring the FD coefficient assigned to the grid points varies with their distance to the center of the spatial FD operator, which will make our M-SFD more reasonable than that of Tan and Huang (2014) and Ren and Li (2017). Then we managed to derive the analytical solution for calculating the FD coefficients with the time-space domain dispersion relation and TE. We first discretized the acoustic and elastic wave equation with our M-SFD and derived the analytical solution of the FD coefficients. This is followed by analysis of difference accuracy, numerical dispersion, and stability. Then, we performed acoustic and elastic numerical simulation on a simple three-layered model and a typical complex structural model of the Tarim Basin in Western China and compared the results of M-SFD and C-SFD. In the end, we carried out acoustic RTM with M-SFD for synthetic seismic data on the complex structural model.
2 Basic Theory of M-SFD
2.1 FD Discrete Acoustic and Elastic Wave Equation Given by M-SFD
The wavefield variables and elastic parameters are defined at staggered grid points in the staggered-grid FD scheme. Figure 1 displays the relative position of the wavefield variables and elastic parameters in acoustic and elastic staggered-grid FD schemes.
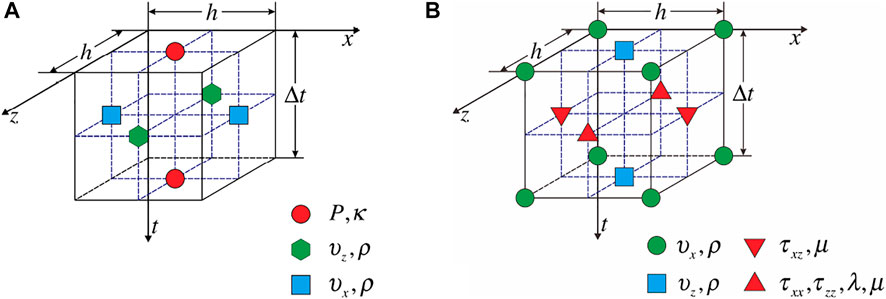
FIGURE 1. Schematic representation of the relative position of the wave-field variables and elastic parameters in (A) acoustic wave and (B) elastic wave staggered-grid FD schemes.
C-SFD adopts temporal second-order and spatial 2Mth-order FD operators. The spatial FD operator is constructed only by the axial grid points, shown in Figure 2A. In this spatial FD operator, M represents the number of sets of axial grid points with each set having the same distance to the center. As we know, M sets of grid points can ensure the spatial FD operator reaches 2Mth-order accuracy. We can also see that the distance of these points to the center of the operator increases with M, while the contribution toward improving the modeling accuracy decreases.
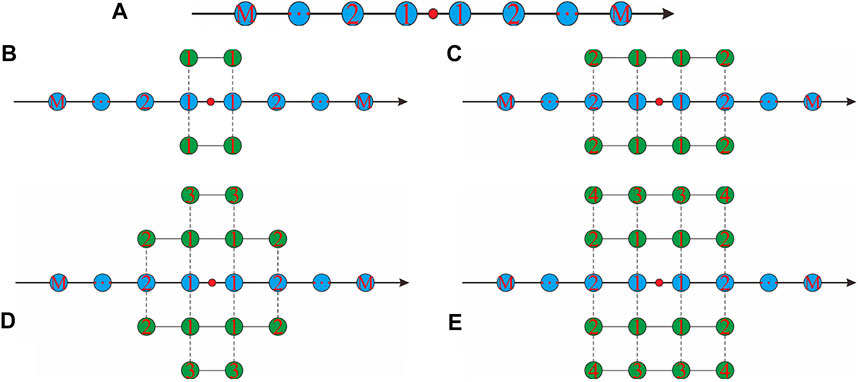
FIGURE 2. Schematic representation of the spatial FD operators of (A) C-SFD and (B–E) M-SFD (N=1, 2, 3, and 4).
In this article, we proposed a modified M-SFD by constructing the spatial FD operator using the axial and off-axial grid points while keeping the temporal second-order FD operator unchanged. In the spatial FD operators, M and N represent the number of sets of axial and off-axial grid points, respectively, and each set of grid points is equidistant from the center of the operator. The identical FD coefficient is assigned to the grid points in the same set, and different FD coefficients are assigned to different sets. Figures 2B–E show the four spatial FD operators of our M-SFD with N=1, 2, 3, and 4. Compared to C-SFD, M-SFD takes full use of the off-axial grid points near the center of the spatial FD operator.
The previous M-SFD (Tan and Huang, 2014; Ren and Li, 2017) inappropriately uses the symmetry of the off-axial grid points. Two different sets of off-axial grid points with unequal distance to the center are sometimes improperly regarded as one set and assigned the same FD coefficient. For example, in Figure 2D, the two sets of off-axial grid points labeled with ② and ③ have a different distance to the center, but the assigned FD coefficients are identical. This inappropriate assignment of the FD coefficients makes it too difficult to derive the analytical solution of the FD coefficients.
In the following, we will take M-SFD (N=1) as an example to derive the FD discrete acoustic and elastic wave equation and then derive the analytical expression of FD coefficients.
2.1.1 FD Discrete Acoustic Wave Equation
The 2D stress–velocity acoustic wave equation is given by
where
Temporal second-order FD operator to approximate
where
where
Similarly, we can get the FD expressions of
Equation 4 is the FD discrete acoustic wave equation given by M-SFD (N=1). Similarly, the FD discrete acoustic wave equation given by M-SFD (N=2,3,4) can be derived.
2.1.2 FD Discrete Elastic Wave Equation
The 2D stress–velocity elastic wave equation is given by
where
Similar to the derivation process of the FD discrete acoustic wave equation, the FD discrete elastic wave equation given by M-SFD (N=1) can be derived. Here, we only gave one of the five FD equations:
where
Using the same method, the FD discrete elastic wave equation given by M-SFD (N=2,3,4) can be derived.
2.2 FD Coefficient Calculation
2.2.1 FD Coefficient Calculation for the FD Discrete Acoustic Wave Equation
In a homogeneous medium, Eq. 1 has the following discrete plane wave solution
where
Substituting Eq. 7 into Eq. 4, we can get
By eliminating
where
Equation 9 represents the dispersion relation of the FD discrete acoustic wave equation given by M-SFD (N=1), and it is also named as a time-space domain dispersion relation.
Taking the Taylor series expansion for cosine and sine functions in Eq. 9, we have
where the expressions of
Comparing the coefficients of
Comparing the coefficients of
Equation 13 gives
Substituting Eq. 14 into Eq. 11, we have
Rewriting Eq. 15 into a matrix equation, we have
Equation 16 is a type of Vandermonde matrix equation.
Combining
Equation 17 gives the analytical expression of the FD coefficients for M-SFD (N=1). Analogously, the analytical expression for M-SFD, with N taking any positive integer value, can be derived as well. The analytical expressions of the FD coefficients for M-SFD (N=2,3,4) are given in the Appendix.
2.2.2 FD Coefficient Calculation for the FD Discrete Elastic Wave Equation
Similar to the derivation of the dispersion relation of the FD discrete acoustic wave equation, substituting the discrete plane wave solution into the FD discrete elastic wave equation and eliminating the amplitude factors, we have
Equation 18 is the dispersion relation of the FD discrete elastic wave equation given by M-SFD (N=1).
From Eq. 18, we can get
where
Eq. 19 and 20 are the P- and S-wave time–space domain dispersion relation. We can see that Eq. 19 and 20 have the same format with Eq. 9, so the FD coefficients in the FD discrete elastic wave equation given by M-SFD (N=1) can be calculated with the same method. Equations about the FD coefficients are established via expanding the trigonometric functions in Eq. 19 with the Taylor series. Solving the equations, we can get
Equation 21 is one of the analytical expressions of the FD coefficients in the FD discrete elastic wave equation given by M-SFD (N=1), and the other analytical expression can be obtained by substituting
For simulation of the elastic wave equation, the FD coefficients calculated based on the P-wave time-space domain dispersion relation ensure high modeling accuracy of P-wave, whereas the accuracy of S-wave is relatively low. On the contrary, the FD coefficients calculated from the S-wave time-space domain dispersion relation ensure high modeling accuracy of S-wave, but the accuracy of P-wave is relatively low.
2.3 Accuracy Analysis of the FD Discrete Wave Equation
According to Eq. 9, we can define the error function
Using Eqs. 10–13, Eq. 22 can be rewritten as
where
Equation 23 shows that the minimum power of
For elastic wave simulation with M-SFD (N=1,2,3,4), with the FD coefficients calculated based on the P-wave time-space domain dispersion relation, the P-wave can reach fourth, sixth, sixth, and eighth-order accuracy respectively, but the accuracy of S-wave remains second-order. On the contrary, with the FD coefficients calculated from the S-wave time–space domain dispersion relation, the S-wave can reach fourth, sixth, sixth, and eighth-order accuracy, but the accuracy of the P-wave remains second-order.
Table 1 lists the number of off-axial grid points required by our M-SFD and the previous M-SFD (Tan and Huang, 2014; Ren and Li, 2017) to make the FD discrete acoustic wave equations reach fourth, sixth, and eighth-order accuracy. We can find that our M-SFD usually needs fewer off-axial grid points than that of the previous M-SFD, to achieve the same order accuracy, which enables our M-SFD to be more efficient.
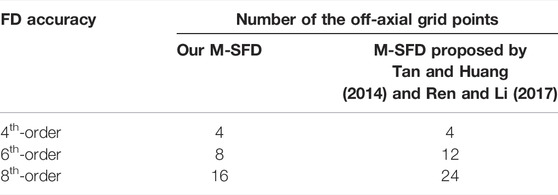
TABLE 1. Number of the off-axial grid points required by our M-SFD and the previous M-SFD to make the FD discrete acoustic wave equation reach specified order accuracy.
3 Elastic Wave Modeling Strategy With High Accuracy
For elastic wave simulation with M-SFD, the FD coefficients calculated with P- or S-wave time–space domain dispersion relation can only ensure the P- or S-wave to achieve high modeling accuracy respectively. In order to improve the modeling accuracy of P- and S-wave simultaneously, the elastic wave Equation 5 can be decomposed as (Li et al., 2007)
The workflow to solve the decomposed elastic wave equations with M-SFD is as follows: ① the FD discrete equations for the decomposed P-wave (equation 25) and S-wave (Equation 26) with M-SFD are derived. ② The discrete P-wave equation is solved with the FD coefficients computed by the P-wave time-space domain dispersion relation. ③ The discrete S-wave equation is solved with FD coefficients computed by the S-wave time-space domain dispersion relation. ④
According to the aforementioned workflow, the decomposed P- and S-wave equations are solved with the FD coefficients calculated based on the P- and S-wave time-space domain dispersion relation respectively, and then P- and S-wave can reach high modeling accuracy at the same time.
4 Dispersion and Stability Analyses
4.1 Dispersion Analysis
According to Eq. 9 and the phase velocity formula
If
Similarly, we can derive the expressions of
Using the expressions of
Figure 3 gives the phase velocity dispersion curves of C-SFD (M=2, 5, 8) and M-SFD (M=2, 5, and 8; N=1) with
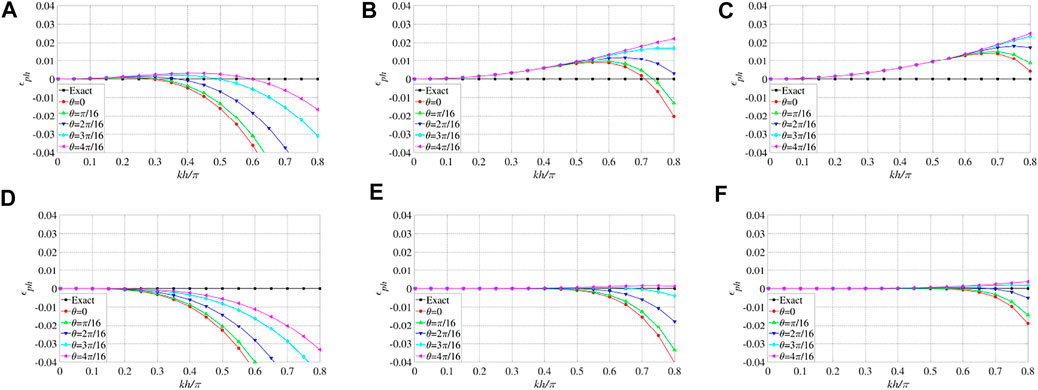
FIGURE 3. Phase velocity dispersion curves of the acoustic staggered-grid FD schemes with
Figure 4 gives the phase velocity dispersion curves of M-SFD (M=6, 18, 30; N=1, 2, 3, and 4) with
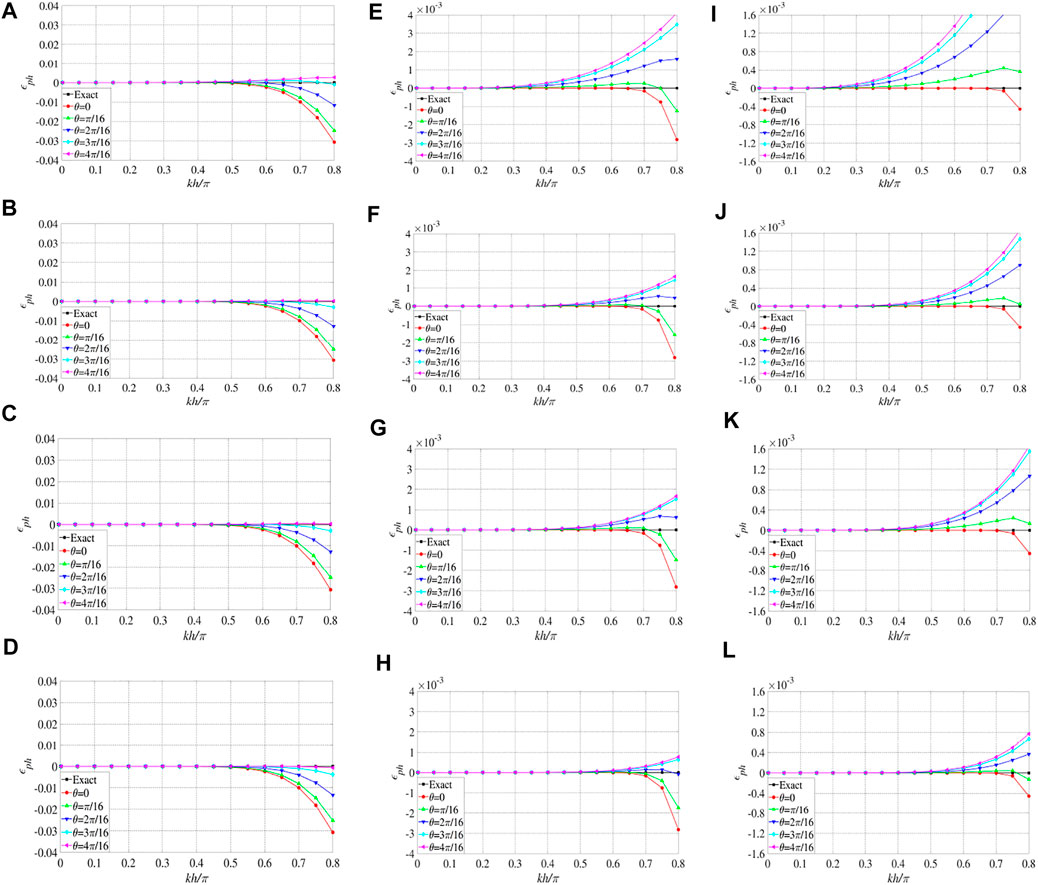
FIGURE 4. Phase velocity dispersion curves of the acoustic staggered-grid FD schemes with
From the aforementioned analyses, we can infer that, for acoustic wave simulation with M-SFD, the modeling accuracy is relatively high for general usage with N=1 and M being about 6, and the modeling accuracy can meet extremely strict conditions with N=2 and M being about 18. The modeling accuracy further improves with N=4 and M being about 30, but it is not recommended due to very low efficiency. So wave equation modeling with M-SFD can balance modeling accuracy and efficiency by taking proper values for N and M.
We can also find in Figure 4 that, increasing N from 2 to 3 while M is fixed, the dispersion characteristics of M-SFD are unchanged. This is due to the fact that the FD discrete acoustic wave equations given by M-SFD (N=2,3) are both sixth-order accuracy.
Figure 5 displays the P-wave and S-wave phase velocity dispersion curves of C-SFD (M=8) and M-SFD (M=8; N=1) with
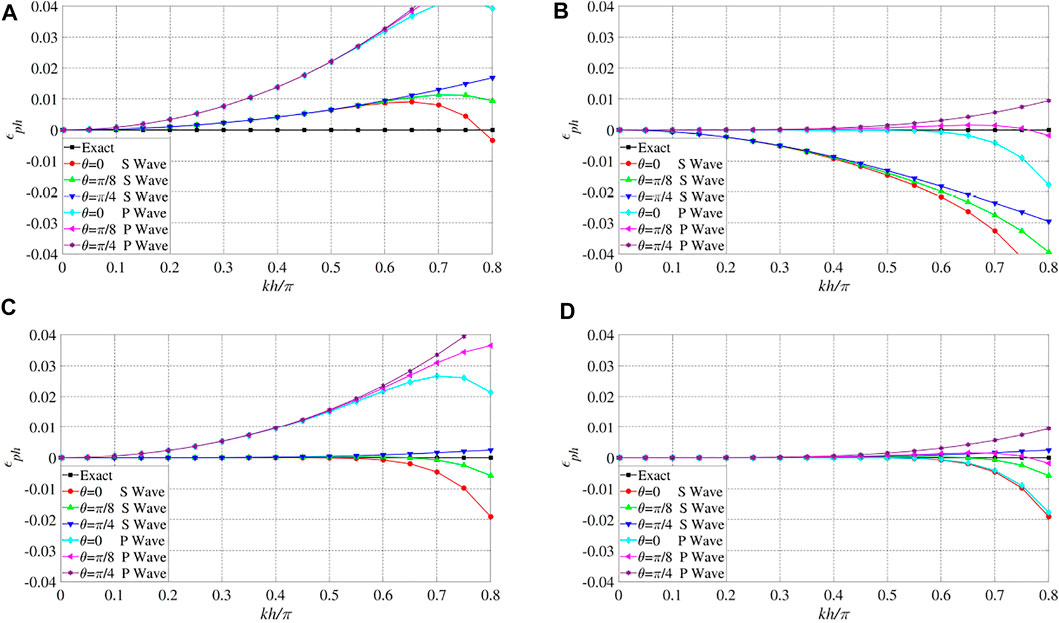
FIGURE 5. P-wave and S-wave phase velocity dispersion curves of the elastic staggered-grid FD schemes with
4.2 Stability Analysis
According to Eq. 9, we can get
Letting
where
Equation 29 represents the stability condition of the FD discrete acoustic wave equation given by M-SFD (N=1). Similarly, the stability condition of C-SFD and M-SFD (N=2,3,4) can also be derived. Furthermore, we can also derive the P-wave and S-wave stability conditions of C-SFD and M-SFD (N=1,2,3,4) in the same way.
Figure 6 displays the curve of maximum
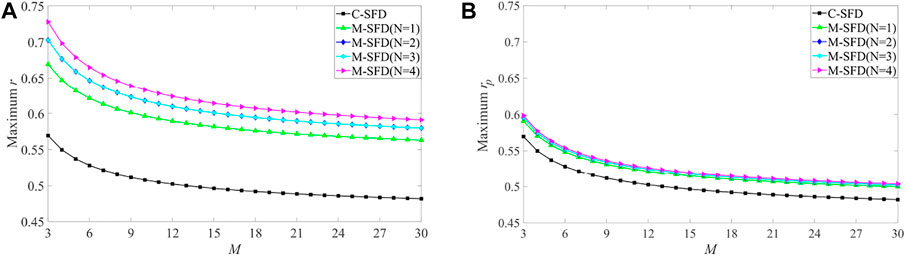
FIGURE 6. Stability curves of the FD discrete (A) acoustic wave and (B) elastic wave equation given by C-SFD and M-SFD (N=1, 2, 3, and 4). In (B), the FD coefficients are calculated with the S-wave time–space domain dispersion relation for M-SFD (N=1, 2, 3, and 4).
Figure 6 demonstrates that for acoustic and elastic wave simulation, the stability of M-SFD (N=1,2,3,4) is better than C-SFD. In addition, the stability of M-SFD with N=2 and N=3 is identical. This can be explained by the same order accuracy of the FD discrete wave equations given by M-SFD (N=2,3).
5 Numerical Modeling and RTM
5.1 Acoustic Wave Modeling
A three-layer model is designed to test our M-SFD method. The horizontal and vertical grid numbers of the model are both 601, with grid size equaling 15 m. The depths of the two reflecting interfaces are 3000 and 4950m, respectively. The acoustic velocities of the three layers are 2400, 2700, and 3200 m/s, respectively. A Ricker wavelet source with a dominant frequency of 20 Hz is located at (750 m, 750 m). Acoustic simulations are performed with C-SFD (M=10) and M-SFD (M=8; N=1), with time step
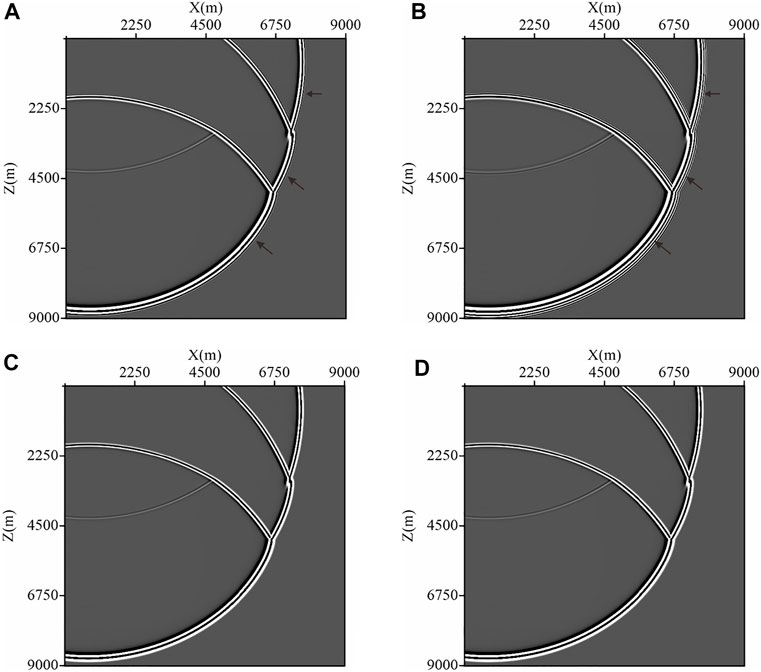
FIGURE 7. Acoustic snapshots at 3.0s for the three-layered model. (A,B) C-SFD (M=10) with the time step
A complex structure model representative of the Tarim Basin in Western China is shown in Figure 8A. The horizontal and vertical grid numbers of the model are 1,201 and 526 respectively, with grid size equaling 15 m. A Ricker wavelet with a dominant frequency of 25 Hz is used as the source, located at (9000 m, 150 m). Acoustic numerical simulations are conducted with C-SFD (M=10) and M-SFD (M=8; N=1), with time step
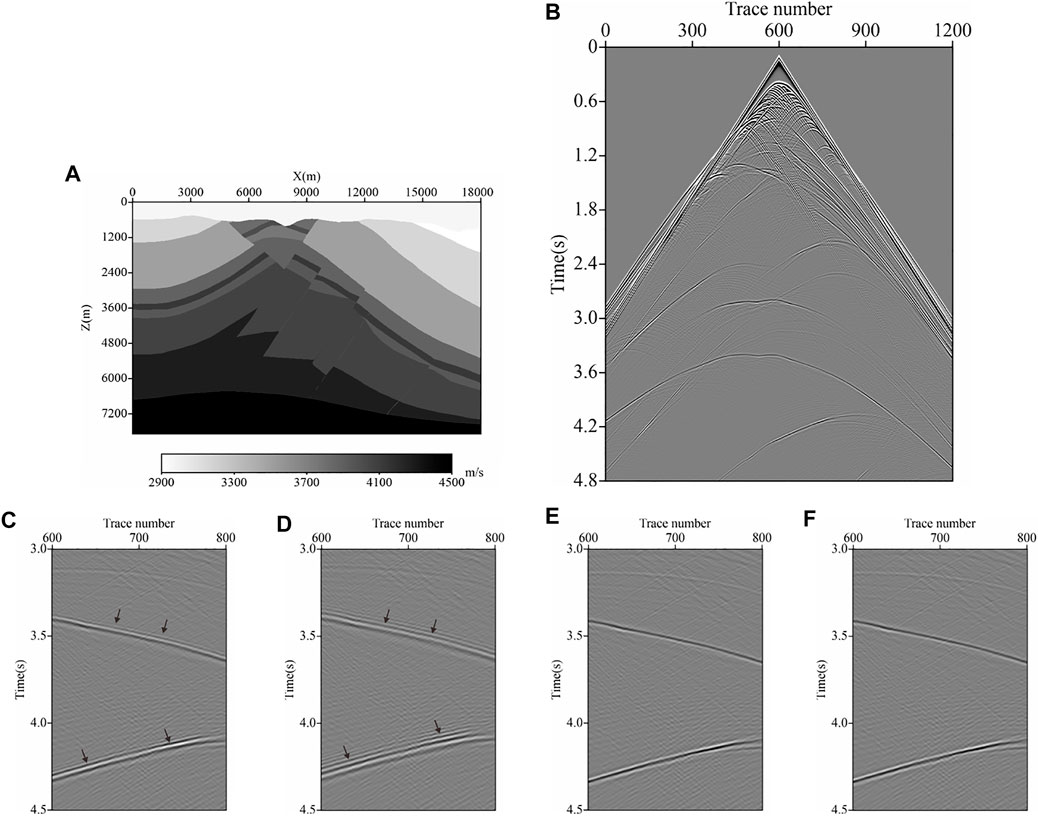
FIGURE 8. (A) Typical complex structural model of the Tarim Basin in Western China; (B) acoustic record modeled by M-SFD (M=8; N=1) with time step
The spatial FD operators of C-SFD (M=10) and M-SFD (M=8; N=1) are both composed of 20 grid points, so the computational amount of one iteration for C-SFD (M=10) and M-SFD (M=8; N=1) is almost the same. Then, C-SFD (M=10) and M-SFD (M=8; N=1) will be almost the same computational efficiency when the same time step is adopted.
Comparing the snapshots in Figure 7 and the amplified regions of the seismic records in Figures 8C–F, we find that slight time dispersion exists in the results simulated by C-SFD (M=10) with time step
5.2 Elastic Wave Modeling
The first elastic wave modeling is carried out on a three-layered model. The horizontal and vertical grid numbers of the model are both 601, with grid size equaling 10 m. The P-wave velocities of the three layers are 2400, 2700, and 3200 m/s, and the S-wave velocities of the three layers are 1500, 1620, and 1800 m/s respectively. The depths of the two reflectors are 2000 and 3300 m. A Ricker wavelet source with a dominant frequency of 20 Hz is located at (500 m, 500 m). Figures 9, 10 show the snapshots of the
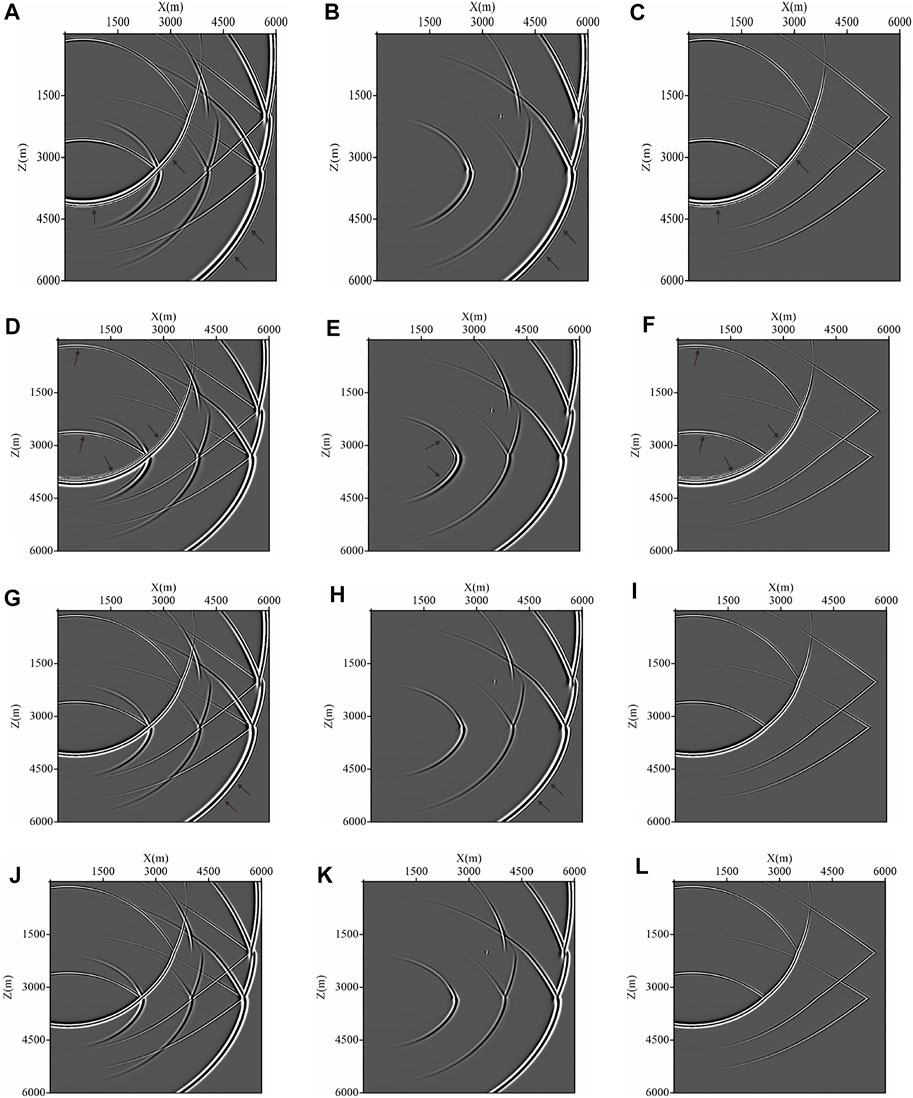
FIGURE 9. Elastic snapshots of
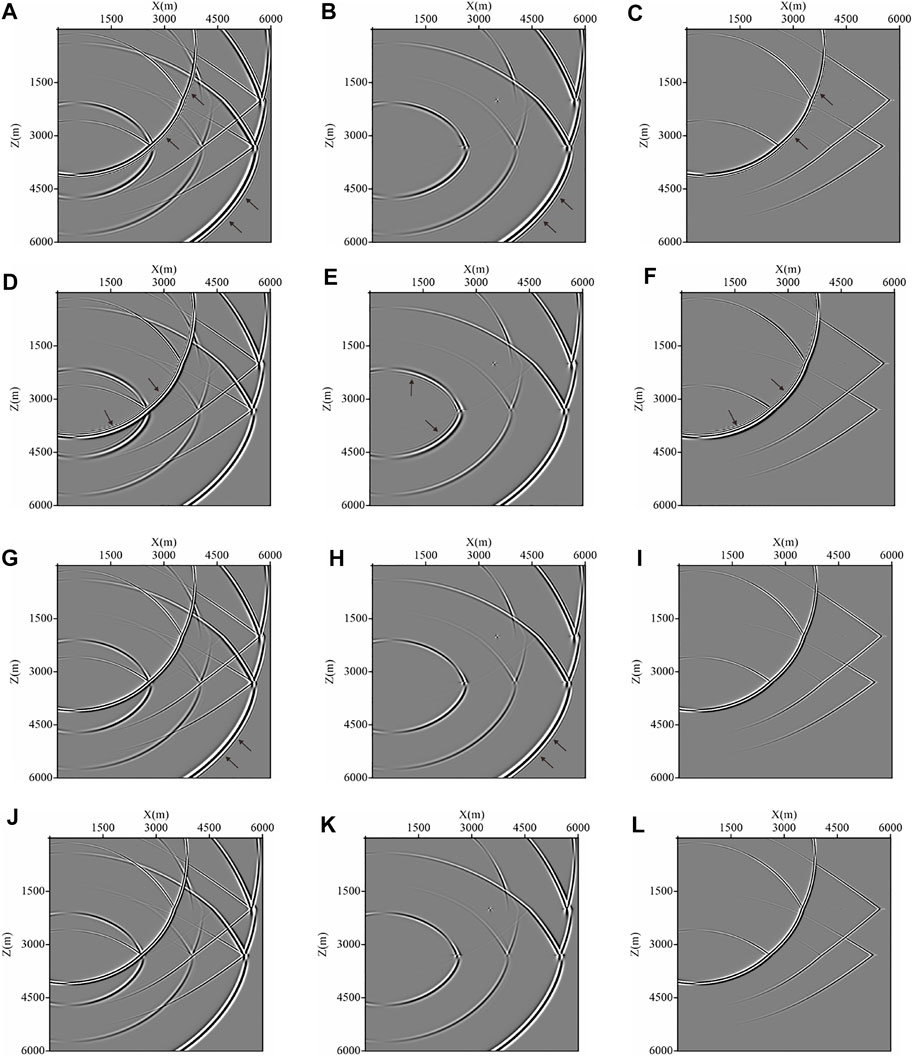
FIGURE 10. Elastic snapshots of
Figures 9, 10 indicate that in the result modeled by C-SFD (M=10), both P-wave and S-wave show obvious time dispersion. In the result modeled by M-SFD (M=8; N=1) with the FD coefficients calculated based on the P-wave time-space domain dispersion relation, P-wave has no obvious numerical dispersion, but obvious space dispersion exists in S-wave. In the result modeled by M-SFD (M=8; N=1) with the FD coefficients calculated based on the S-wave time-space domain dispersion relation, S-wave has no obvious numerical dispersion, but slight time dispersion exists in P-wave. In the result modeled by M-SFD (M=8; N=1) with the decomposed P- and S-wave equation, both P- and S-wave have no obvious numerical dispersion.
Based on the aforementioned analyses, we can infer that with almost the same computational efficiency, M-SFD (M=8; N=1), with the FD coefficients calculated based on the S-wave time-space domain dispersion relation, suppresses the numerical dispersion of both P- and S-wave more effectively to obtain higher modeling accuracy than C-SFD (M=10). In addition, solving the decomposed P- and S-wave equations with M-SFD (M=8; N=1) can further improve the modeling accuracy. But it will increase the amount of computation and the occupation of memory. Calculating The FD coefficients based on the P-wave time-space domain dispersion relation for M-SFD (M=8; N=1) is not recommended, which causes serious spatial dispersion for S-wave.
The typical complex structural model of the Tarim Basin of Western China is used in the following simulation. The P-wave velocity model is shown in Figure 8A. The S-wave velocity is generated by dividing 1.8 by the P-wave velocity. The grid size is changed to 10 m. A Ricker wavelet with a dominant frequency of 20 Hz is used as the source, located at (6000 m, 100 m). Figure 11A–D display the amplified regions of the seismic records of the
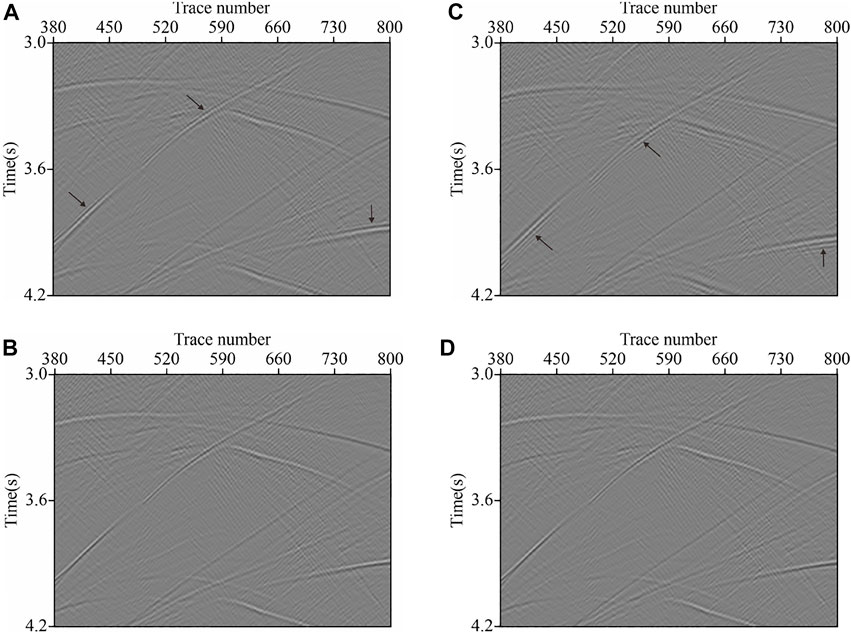
FIGURE 11. Local parts of the elastic record of the
By examining the zoomed region of the seismic records we can see that the seismic record modeled by C-SFD (M=10) shows obvious time dispersion. With the FD coefficients calculated based on the P-wave time-space domain dispersion relation, the seismic record modeled by M-SFD (M=8; N=1) shows some space dispersion. With the FD coefficients calculated based on the S-wave time-space domain dispersion relation, the seismic record modeled by M-SFD (M=10; N=1) displays no obvious dispersion. The seismic record obtained by solving the decomposed P-wave and S-wave equation with M-SFD (M=10; N=1) also has no obvious dispersion, but it is of high computational expense and memory occupation.
The aforementioned analyses demonstrate that for elastic wave simulation, with almost the same computational efficiency, M-SFD (M=8; N=1), with the FD coefficients calculated based on the S-wave time-space domain dispersion relation, can suppress the numerical dispersion more effectively to reach higher modeling accuracy than C-SFD (M=10).
5.3 Acoustic RTM
We further extend M-SFD to acoustic wave RTM and then perform an RTM test on the complex structure model in Figure 8A. The source wavelet is a Ricker wavelet with a dominant frequency of 25 Hz. And 150 shot gathers without numerical dispersion are modeled by C-SFD (M=15) with a very small time step
We use C-SFD (M=10) and M-SFD (M=8; N=1) as the wavefield propagation operator of the RTM with the time step
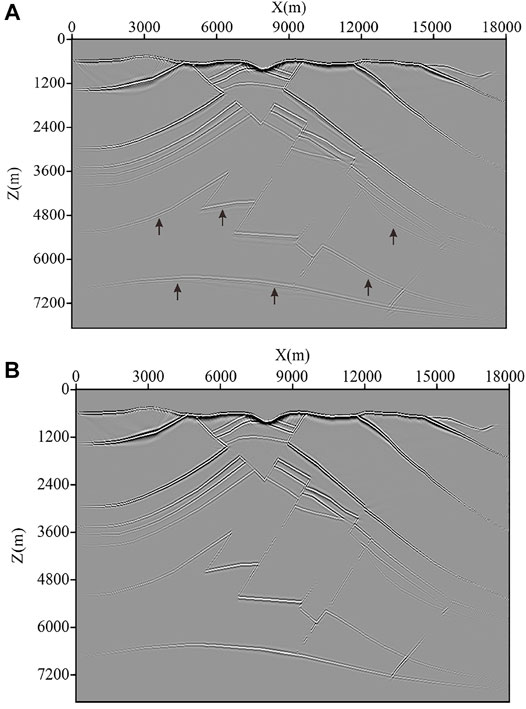
FIGURE 12. Acoustic wave RTM results with (A) C-SFD (M=10) and (B) M-SFD (M=8; N=1) for the typical complex structural model of the Tarim Basin in Western China.
6 Discussion
In this section, we discussed the stability of C-SFD and M-SFD for elastic wave simulation on a medium with a high Poisson’s ratio. A two-layered model shown in Figure 13 is adopted, with a grid size equaling 10 m. The Poisson’s ratios of the layer are 0.395 and 0.306. Figure 13(B-E) displays the snapshots of the
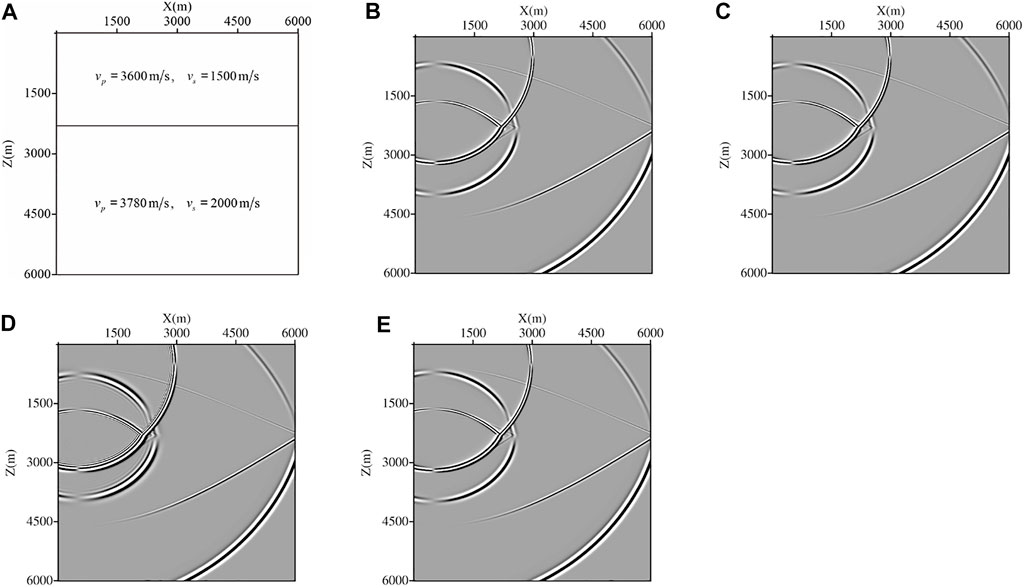
FIGURE 13. Layered model and snapshots of the
Limited to the stability condition, the simulation by C-SFD (M=10), with a time step
The aforementioned analyses show that both C-SFD and M-SFD are suitable for elastic wave simulation on a model with a high Poisson’s ratio. However, the stability of M-SFD is better than C-SFD, when the FD coefficients are calculated based on the P-wave time-space domain dispersion for M-SFD or the simulation is implemented by solving the decomposed P- and S-wave equations with M-SFD. The better stability ensures M-SFD to adopt a larger time step.
After the comprehensive considerations of the modeling accuracy and stability, elastic wave simulation with M-SFD by solving the decomposed P- and S-wave equations could be a feasible option. Nevertheless, this scheme is at the expense of rather high computational resources, so its superiority of it should be further evaluated thoroughly.
7 Conclusion
In this article, by constructing the spatial FD operator with the axial and off-axial grid points jointly to approximate the first-order spatial derivatives, we developed an M-SFD for acoustic and elastic wave equation simulation. Furthermore, we successfully derived the analytical expression of the FD coefficients based on the time-space domain dispersion relation and TE. Then, FD accuracy analysis, dispersion analysis, stability analysis, numerical simulation, and RTM tests are performed. Several conclusions can be deduced:
1) The FD discrete acoustic equation given by C-SFD can only reach the second-order accuracy, while the FD discrete acoustic equation given by M-SFD (N=1, 2, 4) can reach the fourth, sixth, or eighth-order accuracy, and theoretically, it can reach arbitrary even-order accuracy with increasing N continuously.
2) For acoustic wave simulation, compared to C-SFD, M-SFD can suppress the numerical dispersion more effectively to reach higher modeling accuracy with almost the same computational efficiency. Moreover, M-SFD can achieve higher computational efficiency by adopting a larger time step and reach higher modeling accuracy at the same time.
3) The FD coefficients calculated based on P- or S-wave time-space domain dispersion relation can ensure only the P- or S-wave in the FD discrete elastic wave equation given by M-SFD (N=1,2,4) reaches the fourth, sixth, and eighth-order accuracy respectively. Solving the decomposed P- and S-wave equation with M-SFD (N=1, 2, 4) can make P- and S-waves reach the fourth, sixth, and eighth-order accuracy at the same time.
4) For elastic wave simulation, with almost the same efficiency, M-SFD, with its FD coefficients calculated based on the S-wave time-space domain dispersion relation, can suppress both P- and S-wave dispersion more effectively to achieve higher modeling accuracy than C-SFD. By solving the decomposed P- and S-wave equation with M-SFD, the modeling accuracy can be improved further, but the computation efficiency degrades. The FD coefficients calculated based on the P-wave time-space domain dispersion relation should not be adopted for M-SFD, which causes serious spatial dispersion for the S-wave.
5) For both acoustic and elastic wave simulations, M-SFD has better stability than C-SFD.
6) Compared to C-SFD, M-SFD used as the wavefield propagation operator in RTM more effectively eliminates the imaging artifacts caused by the numerical dispersion, which successfully improves the imaging accuracy and resolution of the deep structure.
Data Availability Statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author Contributions
WL derived the analytical expression of the FD coefficients and performed the numerical modeling. ZH performed the numerical dispersion analysis. XY performed the stability analysis. GP conducted the RTM. ZX plotted some of the Figures. LH conducted the elastic wave modeling.
Funding
This research is supported by the Project of Science and Technology of CNPC under the Grant No. 2021DJ3501.
Conflict of Interest
Author GP was employed by Tarim Oilfield Company, PetroChina.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Acknowledgments
We would like to thank the editor Dr. Jianping Huang and the two reviewers for their valuable comments and suggestions, which greatly improved the quality of our article. We also thank Dr. Dunshi Wu and Dr. Wei Zhu for their help in revising this English manuscript.
Supplementary Material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/feart.2022.873541/full#supplementary-material
References
Alford, R. M., Kelly, K. R., and Boore, D. M. (1974). Accuracy of Finite‐difference Modeling of the Acoustic Wave Equation. Geophysics 39 (6), 834–842. doi:10.1190/1.1440470
Alterman, Z., and Karal, F. C. (1968). Propagation of Elastic Waves in Layered Media by Finite Difference Methods. Bull. Seismol. Soc. Am. 58 (1), 367–398.
Berkhout, A. J. G. (2014). Review Paper: An Outlook on the Future of Seismic Imaging, Part I: Forward and Reverse Modelling. Geophys. Prospect. 62 (5), 911–930. doi:10.1111/1365-2478.12161
Cao, J., and Chen, J.-B. (2018). A Parameter-Modified Method for Implementing Surface Topography in Elastic-Wave Finite-Difference Modeling. Geophysics 83 (6), T313–T332. doi:10.1190/geo2018-0098.1
Chen, J.-B., Cao, J., and Li, Z. (2021). A Comparative Study on the Stress Image and Adaptive Parameter-Modified Methods for Implementing Free Surface Boundary Conditions in Elastic Wave Numerical Modeling. Geophysics 86 (6), T451–T467. doi:10.1190/geo2020-0418.1
Chu, C., and Stoffa, P. L. (2012). Determination of Finite-Difference Weights Using Scaled Binomial Windows. Geophysics 77 (3), W17–W26. doi:10.1190/geo2011-0336.1
Dablain, M. A. (1986). The Application of High‐order Differencing to the Scalar Wave Equation. Geophysics 51 (1), 54–66. doi:10.1190/1.1442040
Fornberg, B. (1988). Generation of Finite Difference Formulas on Arbitrarily Spaced Grids. Math. Comp. 51, 699–706. doi:10.1090/s0025-5718-1988-0935077-0
Geller, R. J., and Takeuchi, N. (1998). Optimally Accurate Second-Order Time-Domain Finite Difference Scheme for the Elastic Equation of Motion: One-Dimensional Case. Geophys. J. Int. 135 (1), 48–62. doi:10.1046/j.1365-246X.1998.00596.x
Hu, Z. D., He, Z. H., Liu, W., Wang, Y. C., Han, L. H., Wang, S. J., et al. (2016). Scalar Wave Equation Modeling Using the Mixed-Grid Finite-Difference Method in the Time-Space Domain (In Chinese). Chin. J. Geophys 59 (10), 3829–3846. doi:10.6038/cjg20161027
Hu, Z. D., Liu, W., Yong, X. S., Wang, X. W., Han, L. H., and Tian, Y. C. (2021). Mixed-grid Finite-Difference Method for Numerical Simulation of 3D Wave Equation in the Time-Space Domain (In Chinese). Chin. J. Geophys 64 (8), 2809–2828. doi:10.6038/cjg2021O0296
Jo, C. H., Shin, C., and Suh, J. H. (1996). An Optimal 9‐point, Finite‐difference, Frequency‐space, 2-D Scalar Wave Extrapolator. Geophysics 61 (2), 529–537. doi:10.1190/1.1443979
Li, Z., Zhang, H., Liu, Q., and Han, W. (2007). Numerical Simulation of Elastic Wavefield Separation by Staggering Grid High-Order Finite-Difference Algorithm (In Chinese). Oil Geophys. Prospect. 42 (5), 510–515.
Liu, Y. (2013). Globally Optimal Finite-Difference Schemes Based on Least Squares. Geophysics 78 (4), T113–T132. doi:10.1190/geo2012-0480.1
Liu, Y. (2014). Optimal Staggered-Grid Finite-Difference Schemes Based on Least-Squares for Wave Equation Modelling. Geophys. J. Int. 197 (2), 1033–1047. doi:10.1093/gji/ggu032
Liu, Y., and Sen, M. K. (2009). A New Time-Space Domain High-Order Finite-Difference Method for the Acoustic Wave Equation. J. Comput. Phys. 228 (23), 8779–8806. doi:10.1016/j.jcp.2009.08.027
Liu, Y., and Sen, M. K. (2011). Scalar Wave Equation Modeling with Time-Space Domain Dispersion-Relation-Based Staggered-Grid Finite-Difference Schemes. Bull. Seismol. Soc. Am. 101 (1), 141–159. doi:10.1785/0120100041
Liu, Y., and Sen, M. K. (2013). Time-space Domain Dispersion-Relation-Based Finite-Difference Method with Arbitrary Even-Order Accuracy for the 2D Acoustic Wave Equation. J. Comput. Phys. 232 (1), 327–345. doi:10.1016/j.jcp.2012.08.025
Marfurt, K. J. (1984). Accuracy of Finite‐difference and Finite‐element Modeling of the Scalar and Elastic Wave Equations. Geophysics 49 (5), 533–549. doi:10.1190/1.1441689
Mittet, R. (2021). On the Pseudospectral Method and Spectral Accuracy. Geophysics 86 (3), T127–T142. doi:10.1190/geo2020-0209.1
Moczo, P., Kristek, J., Galis, M., Chaljub, E., and Etienne, V. (2011). 3-D Finite-Difference, Finite-Element, Discontinuous-Galerkin and Spectral-Element Schemes Analysed for Their Accuracy with Respect to P-Wave to S-Wave Speed Ratio. Geophys. J. Int. 187 (3), 1645–1667. doi:10.1111/j.1365-246X.2011.05221.x
Moczo, P., Kristek, J., Galis, M., and Pazak, P. (2010). On Accuracy of the Finite-Difference and Finite-Element Schemes with Respect to P-Wave to S-Wave Speed Ratio. Geophys. J. Int. 182 (1), no. doi:10.1111/j.1365-246X.2010.04639.x
Mulder, W. A. (2017). A Simple Finite-Difference Scheme for Handling Topography with the Second-Order Wave Equation. Geophysics 82 (3), T111–T120. doi:10.1190/geo2016-0212.1
Ren, Z., Dai, X., Bao, Q., Cai, X., and Liu, Y. (2021). Time and Space Dispersion in Finite Difference and its Influence on Reverse Time Migration and Full-Waveform Inversion (In Chinese). Chin. J. Geophys 64 (11), 4166–4180. doi:10.6038/cjg2021P0041
Ren, Z., and Li, Z. C. (2017). Temporal High-Order Staggered-Grid Finite-Difference Schemes for Elastic Wave Propagation. Geophysics 82 (5), T207–T224. doi:10.1190/geo2017-0005.1
Reshef, M., Kosloff, D., Edwards, M., and Hsiung, C. (1988). Three‐dimensional Elastic Modeling by the Fourier Method. Geophysics 53 (9), 1184–1193. doi:10.1190/1.1442558
Pratt, R. G., Shin, C., and Hicks, G. J. (1998). Gauss-Newton and Full Newton Methods in Frequency-Space Seismic Waveform Inversion. Geophys. J. Int. 133 (2), 341–362. doi:10.1046/j.1365-246X.1998.00498.x
Shin, C., and Sohn, H. (1998). A Frequency‐space 2-D Scalar Wave Extrapolator Using Extended 25-point Finite‐difference Operator. Geophysics 63 (1), 289–296. doi:10.1190/1.1444323
Tan, S., and Huang, L. (2014). An Efficient Finite-Difference Method with High-Order Accuracy in Both Time and Space Domains for Modelling Scalar-Wave Propagation. Geophys. J. Int. 197 (2), 1250–1267. doi:10.1093/gji/ggu077
Virieux, J., Calandra, H., and Plessix, R.-É. (2011). A Review of the Spectral, Pseudo-spectral, Finite-Difference and Finite-Element Modelling Techniques for Geophysical Imaging. Geophys. Prospect. 59 (5), 794–813. doi:10.1111/j.1365-2478.2011.00967.x
Virieux, J., and Operto, S. (2009). An Overview of Full-Waveform Inversion in Exploration Geophysics. Geophysics 74 (6), WCC1–WCC26. doi:10.1190/1.3238367
Keywords: mixed staggered-grid finite-difference, numerical simulation, dispersion relation, finite-difference coefficients, numerical dispersion
Citation: Liu W, Hu Z, Yong X, Peng G, Xu Z and Han L (2022) Wave Equation Numerical Simulation and RTM With Mixed Staggered-Grid Finite-Difference Schemes. Front. Earth Sci. 10:873541. doi: 10.3389/feart.2022.873541
Received: 10 February 2022; Accepted: 06 June 2022;
Published: 12 July 2022.
Edited by:
Jianping Huang, China University of Petroleum, Huadong, ChinaReviewed by:
Chenglong Duan, The University of Texas at Dallas, United StatesWeiting Peng, China University of Petroleum (Huadong), China
Copyright © 2022 Liu, Hu, Yong, Peng, Xu and Han. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Wei Liu, bGl1d2VpMjAxM0BwZXRyb2NoaW5hLmNvbS5jbg==