 Wei Liu
Wei Liu Wei Wang2*
Wei Wang2* Jiachun You
Jiachun You Junxing Cao
Junxing Cao- 1College of Geophysics, Chengdu University of Technology, Chengdu, China
- 2State Key Laboratory of Resources and Environmental Information System, Institute of Geographic Sciences and Natural Resources Research, Chinese Academy of Sciences, Beijing, China
- 3School of Civil and Architecture Engineering, Panzhihua University, Panzhihua, China
Numerical simulation of three-dimensional (3D) seismic wavefields forms the basis of the research on the migration methods of 3D seismic data based on wave equations. Because the simulation precision of wavefield extrapolation determines the imaging accuracy to a certain extent, it is very important to study how to enhance the forward modeling precision of 3D seismic wavefields. Thus, we build on an optimized 3D staggered-grid finite-difference (SFD) method with high simulation precision based on two-dimensional (2D) seismic modeling. Since it generates the corresponding difference coefficients by utilizing the least square (LS) method to minimize the objective function constructed by the time-space domain dispersion relation of the 3D acoustic wave equation, our optimized time-space domain LS-based 3D SFD method can effectively enhance the modeling precision of the 3D seismic wavefields in theory compared with the 3D SFD methods based on the Taylor-series expansion (TE), especially for the large wavenumber range. Examining the numerical dispersion, algorithm stability and computational cost, we compare our optimized time-space domain LS-based 3D SFD method with three conventional TE-based and LS-based 3D SFD methods to illustrate and demonstrate its effectiveness and feasibility. The numerical examples from different 3D models suggest that our optimized time-space domain LS-based 3D SFD method can generate less numerical dispersion and higher simulation accuracy for 3D seismic wavefields than three other conventional 3D SFD methods, but its stability condition is stricter and its computational cost is slightly higher.
Introduction
In recent years, the 3D seismic exploration has become one of the main methods to improve the recognition capacity for underground complex geological structures. As the key procedure of 3D seismic data processing, the numerical modeling of 3D seismic wavefields is the basis of the research on the migration methods based on two-way wave equations, because the wavefield extrapolation, which is essentially wavefield numerical modeling, is the core algorithm of this kind of imaging methods. At present, three different approaches are frequently used to solve the different wave equations to model the response characteristics of seismic wave in different media, such as pseudospectral methods (Fornberg, 1987; Huang et al., 2010; Alkhalifah, 2013), finite-element methods (Teng and Dai, 1989; Sotelo et al., 2021), and finite-difference (FD) methods (Bartolo et al., 2012; Fan et al., 2017; Wang et al., 2019a; Wang et al., 2019b; Wang et al., 2021). Among above three approaches, the FD methods are extensively used in the process of seismic modeling compared with the other two methods because of its simple principle, high implementation efficiency and low computational cost. Over the last few decades, the FD methods have been extensively investigated in different aspects, especially the 2D FD methods. For 3D FD methods, the existing conventional FD methods usually cannot meet the requirements of fast and high precision imaging, and therefore it is important to explore how to effectively enhance the precision of 3D seismic modeling for the 3D migration methods based on wave equations.
A focal point of the study of FD methods is to improve the numerical simulation precision, and there are many strategies to achieve this goal. For example, the SFD methods (Virieux, 1984; Virieux, 1986; Robertsson, 1996; Yang et al., 2017; Liang et al., 2018) have a higher modeling precision compared to the conventional FD methods, and therefore the SFD methods are more commonly used than the FD methods for improving the numerical simulation accuracy of seismic wavefields. There is another strategy to achieve this goal effectively: high-order FD or SFD schemes and its corresponding optimal difference coefficients. For this reason, the FD and SFD methods have been deeply explored to obtain high-order simulation precision for temporal and spatial partial derivatives in recent years (Ren and Li, 2019). Correspondingly, the calculation approaches of its difference coefficients have also been systematically discussed in the past few decades, and there are two frequently-used strategies: one is to optimize the objective functions constructed by the space domain dispersion relations (Dablain, 1986; Liu, 2014) and the other is to optimize the objective functions constructed by the time-space domain dispersion relations (Liu and Sen, 2009a; Liu and Sen, 2011a; Liu and Sen, 2011b, Liu and Sen, 2013; Wang et al., 2014; Cai et al., 2015; Ren and Liu, 2015; Xu and Liu, 2018). Using different optimization algorithms to deal with the objective functions of two dispersion relations, such as the TE method (Liu and Sen, 2009b; Liu and Sen, 2011a; Ren and Li, 2017) or LS method (Liu, 2013; Liu, 2014; Ren and Liu, 2015; Xu et al., 2019; Liu et al., 2021), a variety of difference coefficients can be correspondingly generated to simulate seismic wavefields at different times with different simulation accuracy, and therefore they can be called as the different FD or SFD methods. For example, there is a common naming strategy that have been extensively discussed in different publications, including the space domain or time-space domain TE-based methods (Liu and Sen, 2009a; Liu and Sen, 2011a) and the space domain or time-space domain LS-based methods (Liu, 2013; Liu, 2014; Ren and Liu, 2015). In the above four methods, the time-space domain methods usually have higher simulation accuracy than the space domain methods and the LS-based methods usually have higher simulation accuracy than the TE-based methods, which has been fully verified in 2D seismic modeling.
For the numerical simulation of 3D seismic wavefields, different scholars have also done a lot of work in the above different aspects according to 2D FD and SFD methods (Yomogida and Etgen, 1993; Robertsson et al., 1994; Graves, 1996; Pitarka, 1999; Etgen and O’Brien, 2007; Liu and Sen, 2011b; Shragge, 2014; Cai et al., 2015; Wu and Alkhalifah, 2018), which makes the FD and SFD methods developed rapidly in the forward modeling of 3D seismic wavefields, but they are still less than the 2D modeling methods. Like the 2D FD and SFD methods, the research focus of 3D FD and SFD methods is still to improve its numerical simulation accuracy, and the huge computational cost which is a serious factor restricting its development should not be ignored. Considering the modeling accuracy based on different dispersion relations, there are three conventional 3D SFD methods which correspond to the 2D case, including the space domain TE-based 3D SFD methods, the time-space domain TE-based 3D SFD methods and the space domain LS-based 3D SFD methods (Appendix A). According to the previous studies, the second 3D SFD method has higher modeling accuracy than the first 3D SFD method, because it uses the time-space domain dispersion relation to estimate its corresponding difference coefficients; the third 3D SFD method can more effectively suppress the numerical dispersion in the large wavenumber range than the first two 3D SFD methods, because it uses the LS method to optimize the space domain dispersion relation to estimate its corresponding difference coefficients. However, the simulation accuracy of the above three 3D SFD methods are still not high enough, especially for complex velocity models, and therefore it is urgent to study a new 3D SFD method with high modeling accuracy based on the time-space domain dispersion relation and the LS method.
On the basis of previous studies, combining the 3D variable density acoustic wave equation, we build on an optimized time-space domain LS-based 3D SFD method to effectively implement 3D seismic modeling based on 2D seismic modeling, which can more effectively improve the accuracy of 3D seismic modeling. Firstly, the high-order SFD schemes of our method are derived for the 3D variable density acoustic wave equation. Secondly, our optimized 3D SFD method utilizes the LS method to minimize the objective function constructed by the 3D time-space domain dispersion relation to obtain its corresponding optimal difference coefficients, and therefore it can result in lesser numerical dispersion and higher numerical modeling precision for 3D seismic wavefields in theory. To test the effectiveness, feasibility and superiority of our optimized time-space domain LS-based 3D SFD method, we finally compare and analyze the numerical dispersion, algorithm stability and computational cost between it and three conventional 3D SFD methods (Appendix A). The numerical examples of different 3D models suggest that our optimized time-space domain LS-based 3D SFD method has higher numerical modeling precision, stricter stability condition and greater computational cost and can effectively reduce the computing time of 3D wavefield modeling by reducing the difference operator length under the same modeling accuracy requirements compared to three conventional 3D SFD methods, which implies that it can be well applied to the migration method based on wave equations to improve imaging accuracy and reduce computational cost.
Principle and methods
3D SFD methods
To obtain high precision seismic wavefields for forward modeling, Ren and Liu (2015) propose an optimal SFD method by jointly utilizing the time-space domain dispersion equations and the LS method for 2D seismic modeling. On this basis, we build on an optimized time-space domain LS-based 3D SFD method to effectively strengthen the modeling precision for 3D seismic modeling, which can be nicely applied in 3D reverse time migration (RTM).
Different from the 3D constant density acoustic equation applied to homogeneous media, we use the 3D variable density acoustic wave equation to simulate the propagation characteristics of seismic waves in inhomogeneous media in this paper, which can be described as (Liu and Sen, 2011a)
where
By solving Eq. 1 discretely, we can simulate the seismic wavefields at different times for different 3D models. To improve its modeling accuracy, we use the high-order SFD schemes in this paper. When the SFD methods are used to solve Eq. 1, the difference schemes of its temporal and spatial partial derivatives can be discretely written as (Ren and Liu, 2015)
where
Taking Eq. 2 into Eq. 1 and using the chain rule for derivatives outside brackets, the 3D SFD scheme for Eq. 1 can be written as
where
Equation 3 is an equivalent SFD scheme of 3D variable density acoustic equation, it has the same modeling precision and algorithm stability as that of the 3D first-order velocity-stress equations under the same conditions. Furthermore, because this equivalent SFD scheme does not contain the SFD schemes of stress components, it can effectively decrease the memory usage of 3D forward modeling, which is very important for the forward modeling of 3D wave equation. Therefore, the 3D seismic wavefields of a given model at different times can be simulated by utilizing Eq. 3. At present, there are three frequently-used ways to estimate the SFD coefficients for 3D seismic simulation and they are widely discussed by different scholars over the past years (Appendix A). Hence, we only introduce how to calculate the difference coefficients of our optimized time-space domain LS-based 3D SFD method in the section.
Compared with the space domain dispersion equations, the time-space domain dispersion equations are more complex and can be obtained by using the plane wave propagation theory. For the completeness of this paper, we briefly introduce its derivation, and its details can be seen in Appendix B. According to the plane wave propagation theory, the pressure value of 3D seismic wavefields can be written as (Liu and Sen, 2009a; 2011a; 2011b; Cai et al., 2015)
and
where
Substituting Eq. 4 into Eq. 3 and simplifying it, the corresponding time-space domain dispersion equations (Appendix B) can be expressed as
and
where
Expanding the squared terms
where
and
Equation 8 is another mathematical expression of the time-space domain dispersion equations shown in Eq. 6, and it can be used to calculate the optimal SFD coefficients
Comparing with Eqs. 3, 12, the substitution variable
Equation 13 is the final expression of the time-space domain dispersion relation in this paper, and it can be used to establish the objective function to estimate the optimal time-space domain difference coefficients
where
where
Next, we can minimize Eq. 14 to obtain its corresponding time-space domain equivalent SFD coefficients
Simplifying Eq. 16, it can be rewritten as
Finally, the equivalent SFD coefficients
Numerical dispersion and stability conditions
The evaluation of different 3D SFD methods is also an important work, and the numerical dispersion and algorithm stability are usually two key indicators. Thus, we compare our optimized time-space domain LS-based 3D SFD method with three conventional 3D SFD methods (Appendix A) in the above two aspects to highlight its effectiveness and superiority in this paper.
To numerically assess the numerical dispersion of conventional 3D SFD methods, the following two parameters can be defined as respectively
where
By analyzing Eqs. 18, 19, if
For the 3D SFD methods based on Eq. 1, their stability conditions can be described as (Liu and Sen, 2011a)
Equation 20 is not intuitive enough to describe algorithm stability, so we need to expand and adjust it. To numerically evaluate the algorithm stabilities of conventional 3D SFD methods, their stability conditions can be rewritten as (Liu and Sen, 2011a)
where
Using Eqs. 21, 22, we can analyze the algorithm stabilities of different 3D SFD methods to ensure that the numerical simulation process of 3D seismic wavefields is stable. If
Numerical examples
To test and verify the effectiveness, feasibility and superiority of this optimized time-space domain LS-based 3D SFD method, we compare it with three conventional 3D SFD methods in the following aspects by establishing different 3D models, including numerical dispersion analysis, algorithm stability analysis and forward modeling examples.
Numerical dispersion and algorithm stability analysis
We first design a simple 3D homogeneous acoustic model (Model A) to compare and analyze the numerical dispersion of different 3D SFD methods. For this model, we define its model parameters are:
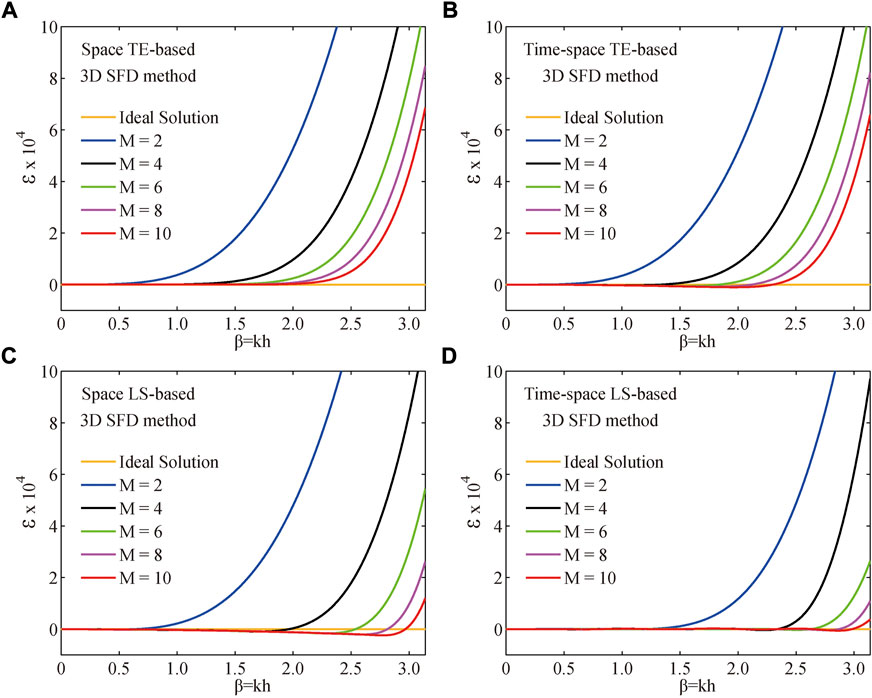
FIGURE 1. Variation curves of numerical dispersion (
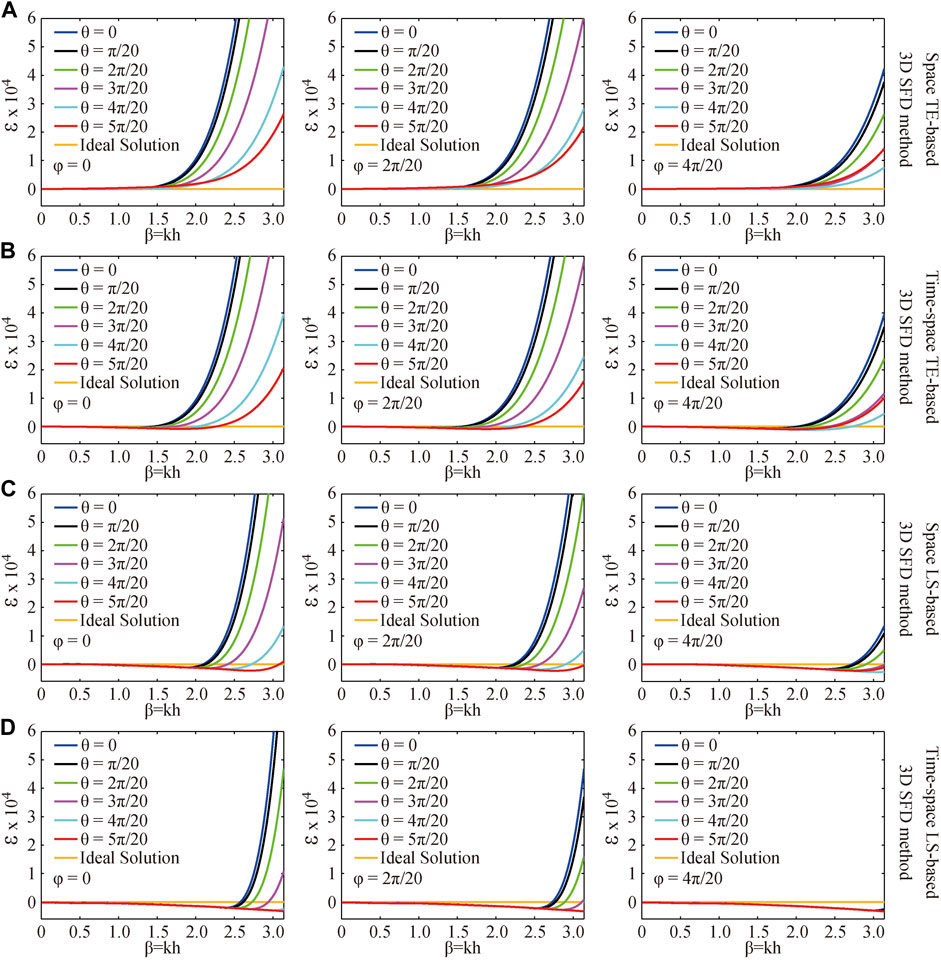
FIGURE 2. Variation curves of numerical dispersion (
Next, this above simple 3D homogeneous acoustic model (Model A) is again employed to analyze the algorithm stabilities of different 3D SFD methods. Figure 3 depicts the variation curves of stability factors (
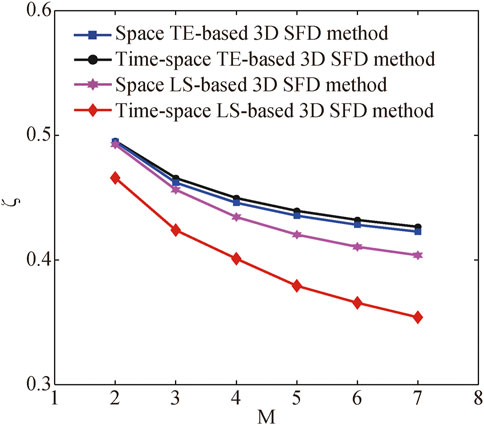
FIGURE 3. Variation curves of stability factors (
Forward modeling examples
To further test and verify the superiority of our optimized time-space domain LS-based 3D SFD method, we use two models to compare and analyze the modeling precision of different 3D SFD methods, including a 3D homogenous acoustic model (Model B) and a complex 3D salt model. The model parameters of the former are:
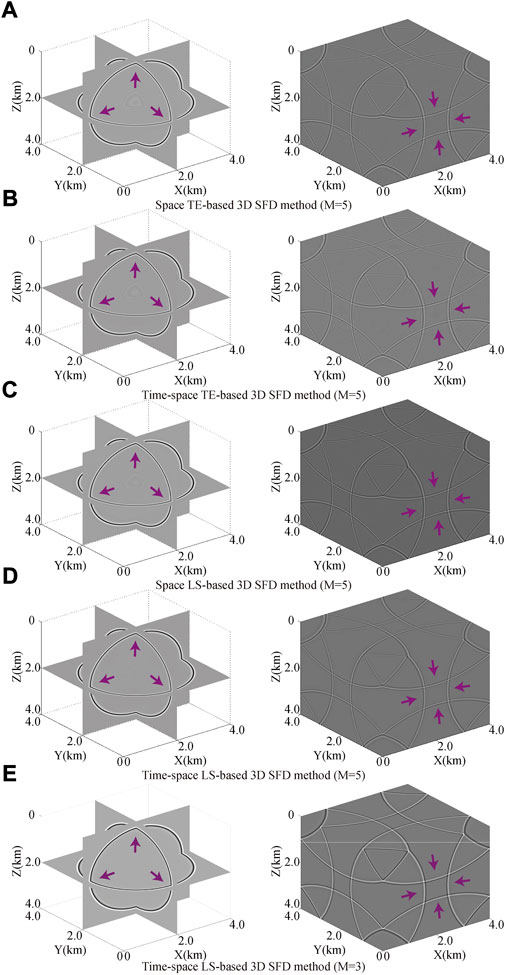
FIGURE 4. 3D snapshots at 0.6 and 1.4 s for the simple 3D homogeneous acoustic model (Model B). These subgraphs (A–E) indicate different 3D SFD methods with different difference operator lengths (
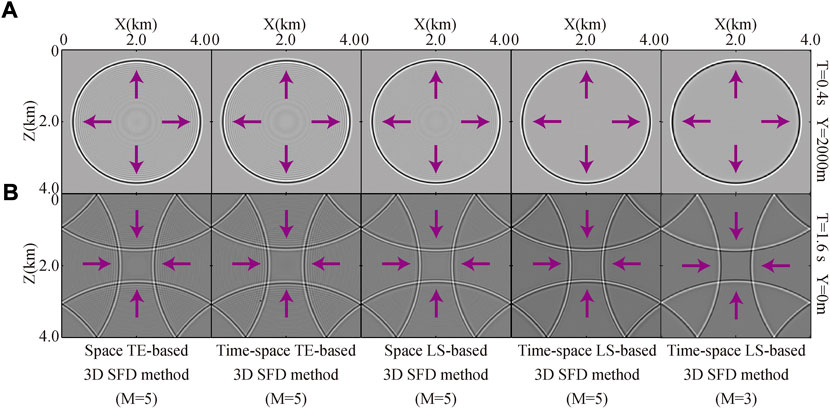
FIGURE 5. 2D slices of the 3D snapshots shown in Figure 4. The subgraphs (A,B) indicate different times, different positions and different 3D SFD methods with different difference operator lengths (
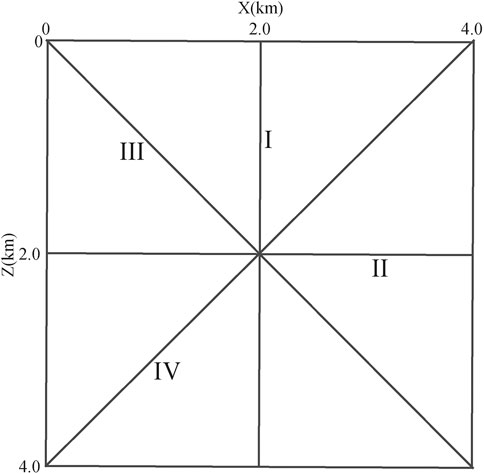
FIGURE 6. Different directions of waveform curves for the 2D slices shown in Figure 5.
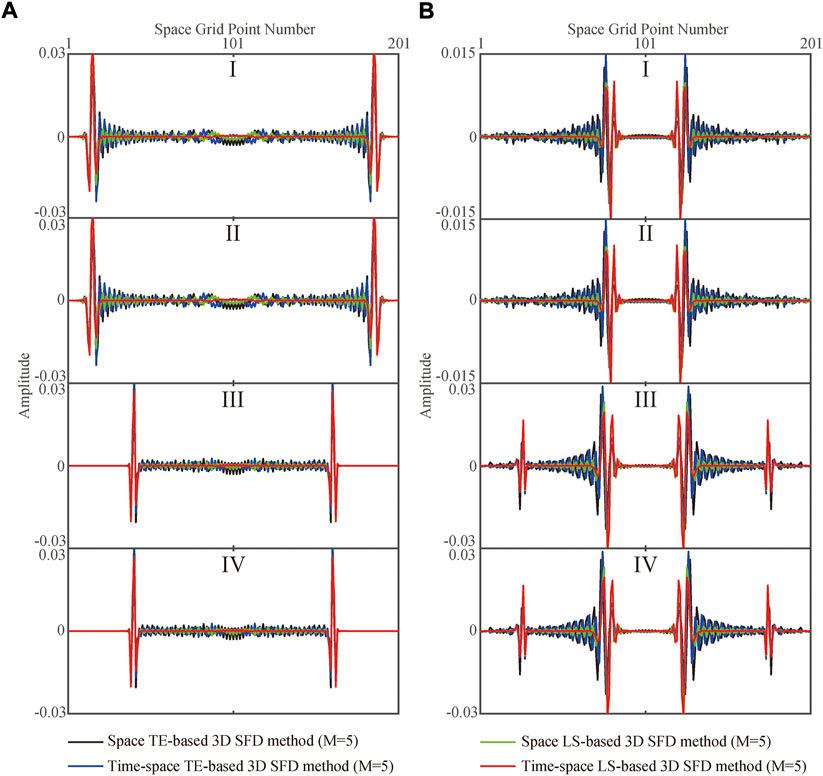
FIGURE 7. Waveform curves of the 2D snapshots (
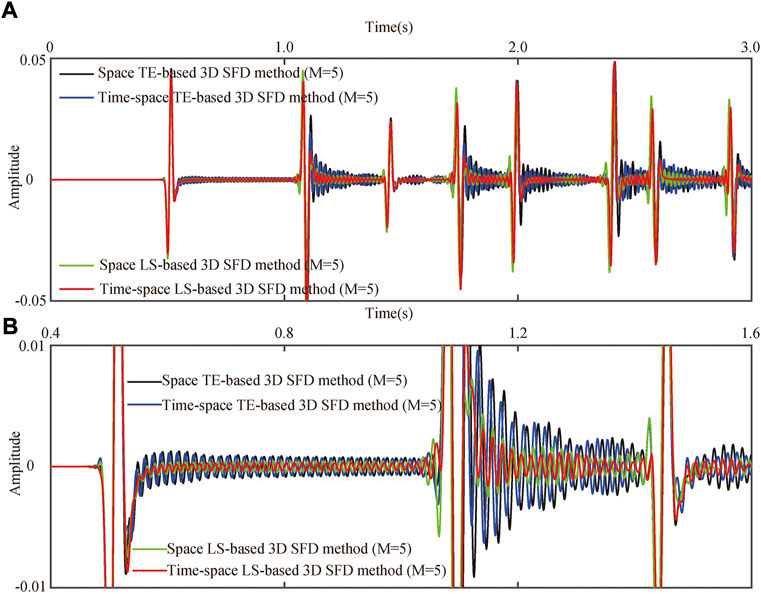
FIGURE 8. Vibration curves simulated by different 3D SFD methods (
Figure 9 shows the velocity and density of the 3D SEG/EAGE salt model, and then we use it to test the applicability of our optimized time-space domain LS-based 3D SFD method for complex geological models. Other model parameters of this model are following:

FIGURE 9. 3D SEG/EAGE salt model. (A) Velocity. (B) Density.
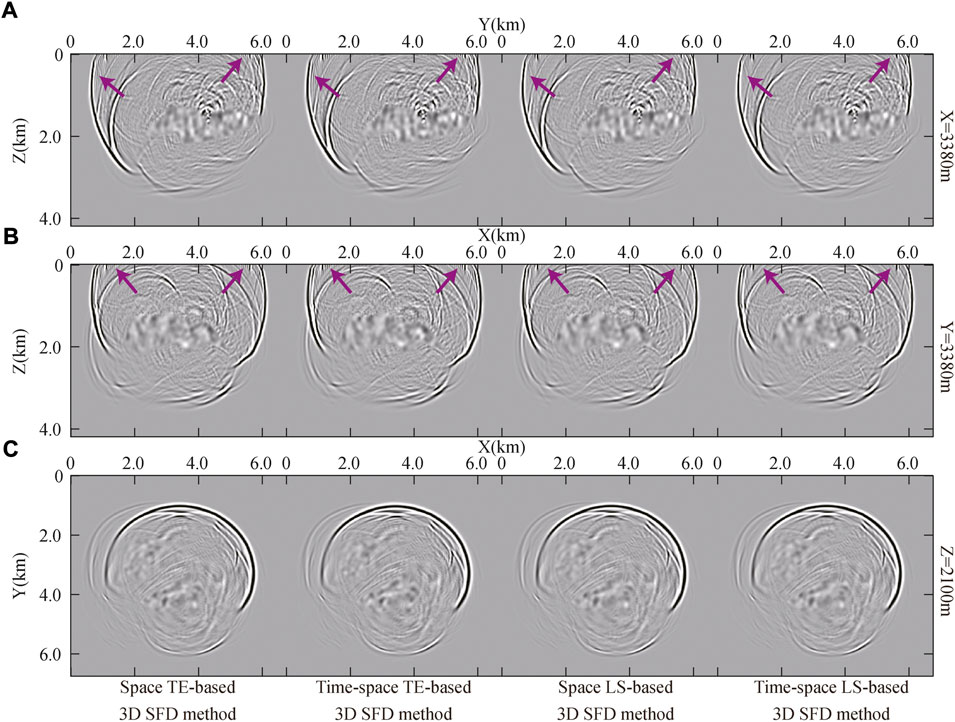
FIGURE 10. 2D slices of the 3D snapshots (
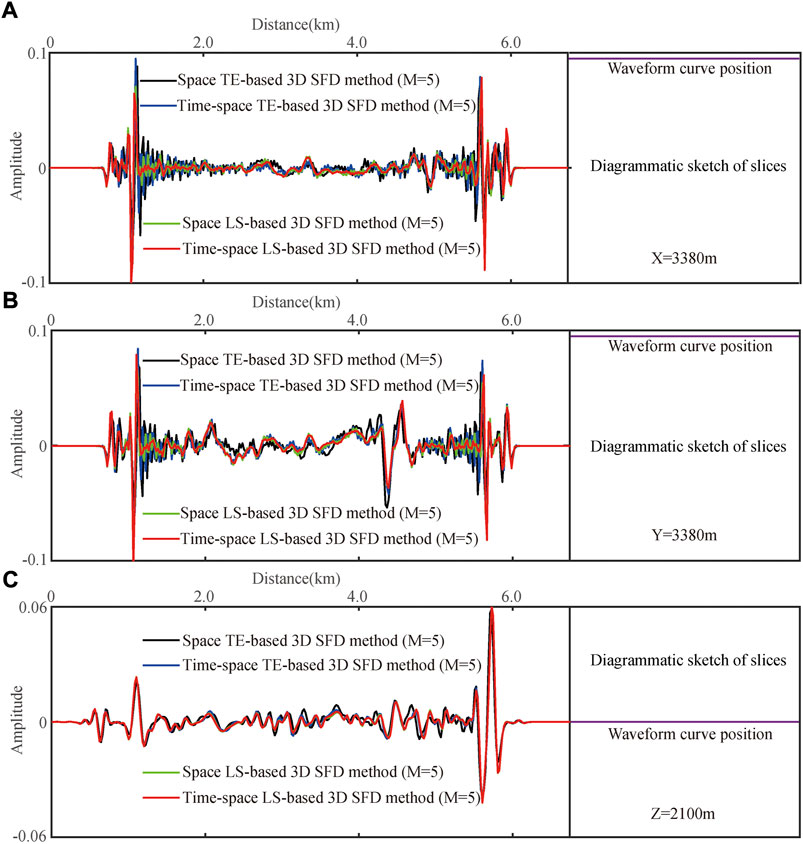
FIGURE 11. Waveform curves of the 2D snapshots (
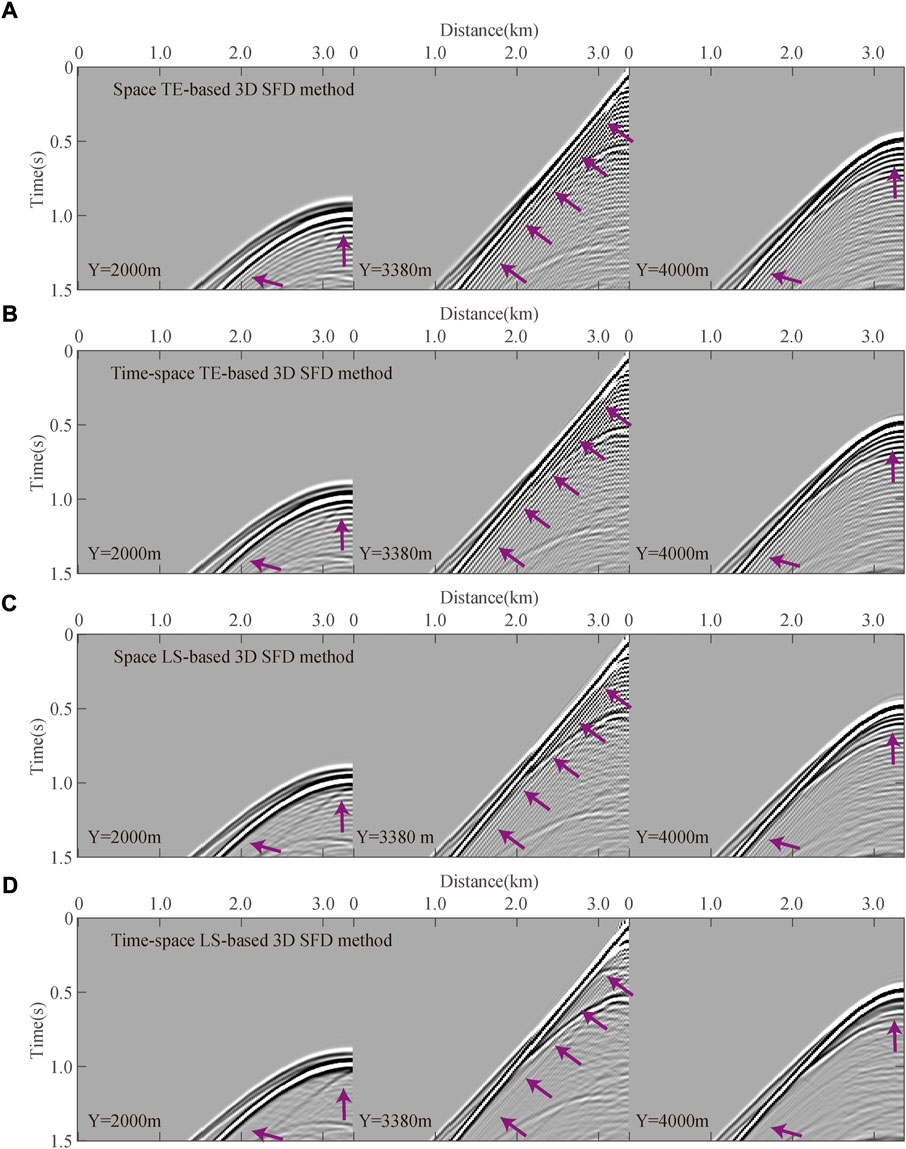
FIGURE 12. Local 2D slices of the 3D seismic records generated by different 3D SFD methods (
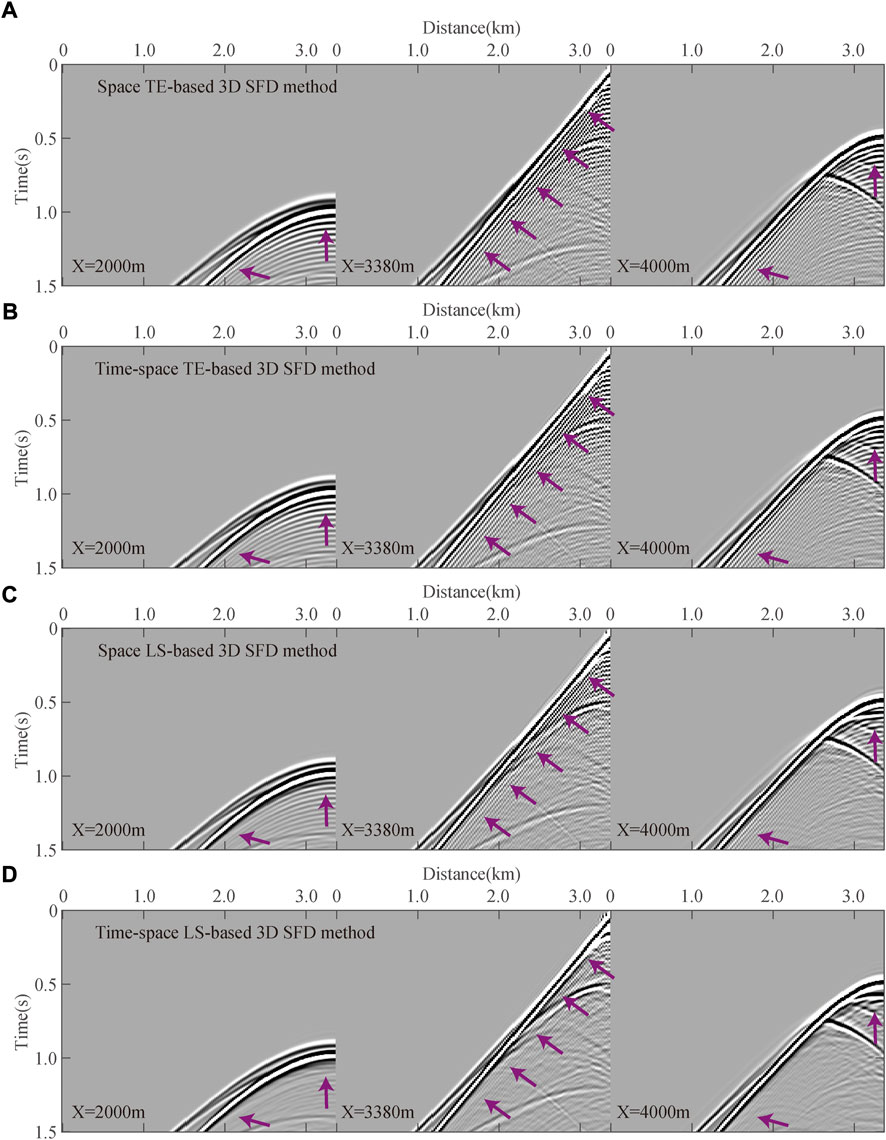
FIGURE 13. Local 2D slices of the 3D seismic records generated by different 3D SFD methods (
Discussion
In addition to the simulation accuracy and algorithm stability, the computational cost is also a significant evaluation index for 3D SFD methods. By analyzing these four different 3D SFD methods mentioned in the previous sections, we can find that the difference of their computational cost can be mainly reflected in the following two aspects: one is the computing time of SFD coefficients, the other is the computing time of 3D wavefield simulation. Because these four different 3D SFD methods all use Eq. 3 to calculate their corresponding 3D seismic wavefields at different times, there is a little difference between the computing time of their wavefield simulation process under the same conditions. We firstly discuss the difference between the computing time for their SFD coefficients. According to the calculation equations of different 3D SFD coefficients, the main factor affecting the corresponding computational cost is the difference operator length, especially for our optimized time-space domain LS-based 3D SFD method. Generally speaking, it will take a longer computing time with a larger difference operator length. Hence, we mainly compare and analyze the computational cost of different 3D SFD coefficients with different difference operator lengths under the same other conditions, and the results are listed in Table 1. According to Table 1, it takes little time to estimate their corresponding SFD coefficients for three conventional 3D SFD methods. In other words, the computational cost of their SFD coefficients can be negligible. Nevertheless, the computing time of SFD coefficients for our optimized time-space domain LS-based 3D SFD method is relatively long and it increases rapidly with the difference operator length increasing, because our optimized method needs to calculate a lot of triple integrals. To effectively reduce the application time of our optimized time-space domain LS-based 3D SFD method, we should first estimate its corresponding equivalent SFD coefficients and store them for a given 3D model, and then we can use these stored equivalent SFD coefficients to model the 3D seismic wavefields and even realize the 3D RTM.
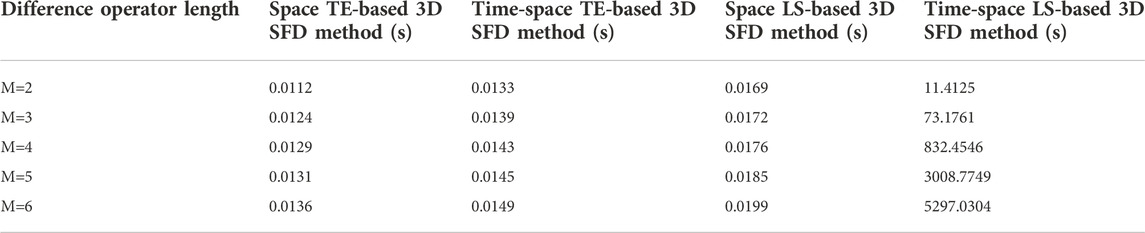
TABLE 1. Computational cost of four 3D SFD coefficients with different difference operator lengths.
To understand the computational cost of different 3D SFD methods more intuitively, we secondly compare the computing time of their wavefield simulation process for the 3D homogenous acoustic model (Model B), which is the sum of the computing time of wavefield simulation at different times. Figure 14 shows the computational cost of different 3D SFD methods with different difference operator lengths for this model B. As we can see in Figure 14, when the difference operator length is equal to five (
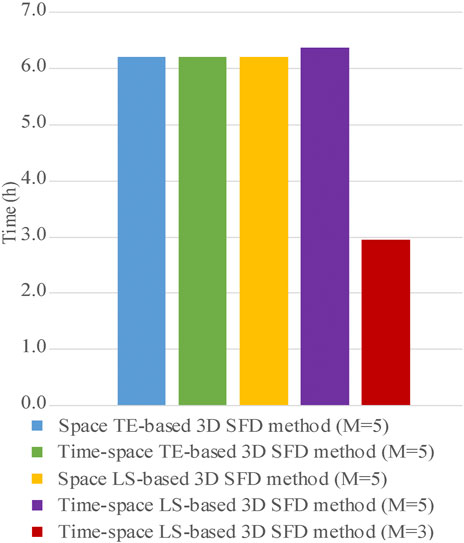
FIGURE 14. Computational cost of wavefield simulation of different 3D SFD methods with different difference operator lengths for the simple 3D homogeneous acoustic model (Model B).
Conclusion
A 3D numerical simulation is the core algorithm of 3D RTM, and its simulation accuracy affects the imaging accuracy of 3D RTM to a considerable degree. To achieve this goal effectively, we build on an optimized 3D SFD method using the time-space domain dispersion relation and the LS method to model the responses of seismic wave in 3D inhomogeneous model based on 2D seismic modeling case. Because this optimized time-space domain LS-based 3D SFD method makes full use of the advantages of the time-space domain dispersion equations and the LS method to estimate its corresponding SFD coefficients, it has weaker numerical dispersion and higher modeling precision theoretically than the conventional 3D SFD methods for 3D seismic wavefields. To compare and analyze the numerical dispersion, simulation accuracy, algorithm stability and computational cost for different 3D SFD methods, we use different 3D numerical models to test and verify the above four aspects. The numerical examples of different 3D models illustrate that our optimized time-space domain LS-based 3D SFD method can produce higher precision simulated 3D wavefields than three conventional 3D SFD methods. Moreover, the stability condition of our optimized time-space domain LS-based 3D SFD method becomes stricter than three conventional 3D SFD methods and it will progressively become worse when the difference operator length increases gradually. Finally, the computational cost of our optimized time-space domain LS-based 3D SFD method is also greater than that of three conventional 3D SFD methods, because it needs a long time to estimate its equivalent SFD coefficients and its wavefield modeling requires a slightly long computing time. However, our optimized time-space domain LS-based 3D SFD method can reduce the computational cost by reducing the difference operator length under the same modeling accuracy requirements.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author contributions
Conceptualization: WL and WW; methodology: WL, WW, and JY; code: WL and JY; writing–original draft: WL; writing–review and editing: WL, JY, and HW; funding acquisition: JC and JY.
Funding
This work is supported by the National Natural Science Foundation of China (Grant Nos. 42030812 and 42004103).
Acknowledgments
We are very grateful to Haihao Liu for his help in revising this English manuscript. We would also like to express thanks for the helpful comments and suggestions from the editors and reviewers.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/feart.2022.1004422/full#supplementary-material
References
Alkhalifah, T. (2013). Residual extrapolation operators for efficient wavefield construction. Geophys. J. Int. 193 (2), 1027–1034. doi:10.1093/gji/ggt040
Bartolo, L. D., Do rs, S., and Mansur, W. J. (2012). A new family of finite-difference schemes to solve the heterogeneous acoustic wave equation. Geophysics 77 (5), T187–T199. doi:10.1190/geo2011-0345.1
Cai, X. H., Liu, Y., Ren, Z. M., Wang, J. M., Chen, Z. D., Chen, K. Y., et al. (2015). Three-dimensional acoustic wave equation modeling based on the optimal finite-difference scheme. Appl. Geophys. 12 (3), 409–420. doi:10.1007/s11770-015-0496-y
Dablain, M. A. (1986). The application of high-order differencing to the scalar wave equation. Geophysics 51 (1), 54–66. doi:10.1190/1.1442040
Etgen, J. T., and O’Brien, M. J. (2007). Computational methods for large-scale 3D acoustic finite-difference modeling: A tutorial. Geophysics 72 (5), SM223–SM230. doi:10.1190/1.2753753
Fan, N., Zhao, L. F., Xie, X. B., Tang, X. G., and Yao, Z. X. (2017). A general optimal method for a 2D frequency-domain finite-difference solution of scalar wave equation. Geophysics 82 (3), T121–T132. doi:10.1190/geo2016-0457.1
Fornberg, B. (1987). The pseudospectral method: Comparisons with finite-differences for the elastic wave equation. Geophysics 52 (4), 483–501. doi:10.1190/1.1442319
Graves, R. W. (1996). Simulating seismic wave propagation in 3D elastic media using staggered-grid finite-differences. Bull. Seismol. Soc. Am. 86 (4), 1091–1106. doi:10.1785/BSSA0860041091
Huang, Q. H., Li, Z. H., and Wang, Y. B. (2010). A parallel 3D staggered grid pseudospectral time domain method for ground-penetrating radar wave simulation. J. Geophys. Res. 115 (B12), B12101–B12113. doi:10.1029/2010JB007711
Liang, W. Q., Xu, X., Wang, Y. F., and Yang, C. C. (2018). A simplified staggered-grid finite-difference scheme and its linear solution for the first-order acoustic wave-equation modeling. J. Comput. Phys. 374 (1), 863–872. doi:10.1016/j.jcp.2018.08.011
Liu, W., You, J. C., Cao, J. X., Liu, J. L., and Hu, R. Q. (2021). Variable density acoustic RTM of VSP data based on the time-space domain LS-based SFD method. Acta Geophys. 69, 1269–1285. doi:10.1007/s11600-021-00614-5
Liu, Y. (2013). Globally optimal finite-difference schemes based on least squares. Geophysics 78 (4), T113–T132. doi:10.1190/geo2012-0480.1
Liu, Y. (2014). Optimal staggered-grid finite-difference schemes based on least-squares for wave equation modelling. Geophys. J. Int. 197 (2), 1033–1047. doi:10.1093/gji/ggu032
Liu, Y., and Sen, M. K. (2009a). A new time-space domain high-order finite-difference method for the acoustic wave equation. J. Comput. Phys. 228 (23), 8779–8806. doi:10.1016/j.jcp.2009.08.027
Liu, Y., and Sen, M. K. (2009b). An implicit staggered-grid finite-difference method for seismic modelling. Geophys. J. Int. 179 (1), 459–474. doi:10.1111/j.1365-246X.2009.04305.x
Liu, Y., and Sen, M. K. (2011a). Scalar wave equation modeling with time-space domain dispersion-relation-based staggered-grid finite-difference schemes. Bull. Seismol. Soc. Am. 101 (1), 141–159. doi:10.1785/0120100041
Liu, Y., and Sen, M. K. (2011b). 3D acoustic wave modelling with time-space domain dispersion-relation-based finite-difference schemes and hybrid absorbing boundary conditions. Explor. Geophys. 42 (3), 176–189. doi:10.1071/EG11007
Liu, Y., and Sen, M. K. (2013). Time-space domain dispersion-relation-based finite-difference method with arbitrary even-order accuracy for the 2D acoustic wave equation. J. Comput. Phys. 232, 327–345. doi:10.1016/j.jcp.2012.08.025
Pitarka, A. (1999). 3D elastic finite-difference modeling of seismic motion using staggered grids with nonuniform spacing. Bull. Seismol. Soc. Am. 89 (1), 54–68. doi:10.1785/BSSA0890010054
Ren, Z. M., and Li, Z. C. (2017). Temporal high-order staggered-grid finite-difference schemes for elastic wave propagation. Geophysics 82 (5), T207–T224. doi:10.1190/geo2017-0005.1
Ren, Z. M., and Li, Z. C. (2019). High-order temporal and implicit spatial staggered-grid finite-difference operators for modelling seismic wave propagation. Geophys. J. Int. 217, 844–865. doi:10.1093/gji/ggz059
Ren, Z. M., and Liu, Y. (2015). Acoustic and elastic modeling by optimal time-space-domain staggered-grid finite-difference schemes. Geophysics 80 (1), T17–T40. doi:10.1190/geo2014-0269.1
Robertsson, J. O. A. (1996). A numerical free-surface condition for elastic/viscoelastic finite-difference modeling in the presence of topography. Geophysics 61 (6), 1921–1934. doi:10.1190/1.1444107
Robertsson, J. O. A., Blanch, J. O., and Symes, W. W. (1994). Viscoelastic finite-difference modeling. Geophysics 59 (9), 1444–1456. doi:10.1190/1.1443701
Shragge, J. (2014). Solving the 3D acoustic wave equation on generalized structured meshes: A finite-difference time-domain approach. Geophysics 79 (6), T363–T378. doi:10.1190/geo2014-0172.1
Sotelo, E., Favino, M., and Gibson, R. L. (2021). Application of the generalized finite-element method to the acoustic wave simulation in exploration seismology. Geophysics 86 (1), T61–T74. doi:10.1190/geo2020-0324.1
Teng, Y. C., and Dai, T. F. (1989). Finite-element prestack reverse-time migration for elastic waves. Geophysics 54 (9), 1204–1208. doi:10.1190/1.1442756
Virieux, J. (1984). SH-wave propagation in heterogeneous media: Velocity-stress finite-difference method. Geophysics 49 (11), 1933–1942. doi:10.1190/1.1441605
Virieux, J. (1986). P-SV wave propagation in heterogeneous media: Velocity-stress finite-difference method. Geophysics 51 (4), 889–901. doi:10.1190/1.1442147
Wang, Y. F., Liang, W. Q., Nashed, Z., Li, X., Liang, G. H., and Yang, C. C. (2014). Seismic modeling by optimizing regularized staggered-grid finite-difference operators using a time-space-domain dispersion-relationship-preserving method. Geophysics 79 (5), T277–T285. doi:10.1190/geo2014-0078.1
Wang, E. J., Carcione, J. M., Ba, J., Alajmi, M., and Qadrouh, A. N. (2019a). Nearly perfectly matched layer absorber for viscoelastic wave equations. Geophysics 84 (5), T335–T345. doi:10.1190/geo2018-0732.1
Wang, E. J., Carcione, J. M., and Ba, J. (2019b). Wave simulation in double-porosity media based on the biot-Rayleigh theory. Geophysics 84 (4), WA11–WA21. doi:10.1190/GEO2018-0575.1
Wang, E. J., Carcione, J. M., Cavallini, F., Botelho, M., and Ba, J. (2021). Generalized thermo-poroelasticity equations and wave simulation. Surv. Geophys. 42, 133–157. doi:10.1007/s10712-020-09619-z
Wu, Z., and Alkhalifah, T. (2018). A highly accurate finite-difference method with minimum dispersion error for solving the Helmholtz equation. J. Comput. Phys. 365 (1), 350–361. doi:10.1016/j.jcp.2018.03.046
Xu, S. G., and Liu, Y. (2018). Effective modeling and reverse-time migration for novel pure acoustic wave in arbitrary orthorhombic anisotropic media. J. Appl. Geophys. 150, 126–143. doi:10.1016/j.jappgeo.2018.01.013
Xu, S. G., Liu, Y., Ren, Z. M., and Zhou, H. Y. (2019). Time-space-domain temporal high-order staggered-grid finite-difference schemes by combining orthogonality and pyramid stencils for 3D elastic-wave propagation. Geophysics 84 (4), T259–T282. doi:10.1190/geo2018-0551.1
Yang, L., Yan, H. Y., and Liu, H. (2017). Optimal staggered-grid finite-difference schemes based on the minimax approximation method with the remez algorithm. Geophysics 82 (1), T27–T42. doi:10.1190/geo2016-0171.1
Keywords: three-dimensional, staggered-grid finite-difference, time-space domain, dispersion relations, least square
Citation: Liu W, Wang W, You J, Cao J and Wang H (2023) An optimized three-dimensional time-space domain staggered-grid finite-difference method. Front. Earth Sci. 10:1004422. doi: 10.3389/feart.2022.1004422
Received: 27 July 2022; Accepted: 02 November 2022;
Published: 17 January 2023.
Edited by:
Tariq Alkhalifah, King Abdullah University of Science and Technology, Saudi ArabiaReviewed by:
Yang Liu, College of Geophysics, China University of Petroleum, ChinaJing Ba, Hohai University, China
Copyright © 2023 Liu, Wang, You, Cao and Wang. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Wei Wang, d2FuZ193ZWlAbHJlaXMuYWMuY24=