 Joseba Sarabia
Joseba Sarabia Mauricio Marcano
Mauricio Marcano Joshué Pérez
Joshué Pérez Asier Zubizarreta
Asier Zubizarreta Sergio Diaz
Sergio Diaz
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
REVIEW article
Front. Control Eng. , 03 February 2023
Sec. Networked Control
Volume 3 - 2022 | https://doi.org/10.3389/fcteg.2022.1058923
This article is part of the Research Topic Model-based Methods for Human-Machine Cooperative and Shared Control Systems View all 6 articles
Shared control has gained considerable attention in the automated vehicle field in recent years, both from a theoretical point of view and also with multiple applications. The development of shared control systems was discussed in a previous review, which presented a taxonomy focused on control algorithms. However, it is still necessary to understand how these systems should be assessed in terms of system performance, driver behavior, cooperation, and road safety. This paper aims to review and classify evaluation methods used in recent studies with real drivers. Results of the present review showed that shared control continues to be of interest to researchers of automated vehicles. The methodology for system evaluation has evolved, with more participants, better testing platforms, and a greater number of comparison baselines. To guide the path toward implementing shared control features in commercial vehicles, this review aims to help researchers to perform relevant evaluation studies in future developments.
Shared control in automated vehicles keeps gaining attention through the years. The idea that drivers and automated vehicles can continuously cooperate at the control level for safer driving is still the goal of many automotive technology researchers worldwide. Starting from early studies (Griffiths and Gillespie, 2005), hundreds of technical works have been developed in the form of driver assistance systems based on shared control. Based on these works, recent reviews have concluded that shared control is a promising approach that is worth to keep investigating (Abbink et al., 2018; Wang et al., 2020a; Marcano et al., 2020).
The definition of Shared Control (SC) has long been unclear, which has led works such as (Abbink et al., 2018) to propose what currently is the more widespread version: a congruent human-automation interaction in a perception-action cycle to perform a dynamic task that either the human or automation could execute individually under ideal circumstances. This concept is different from one proposed by traded control (de Winter et al., 2022), in which the human operator delegates tasks to the automation, supervises the automation, and occasionally resumes manual control. Hence, while in traded control driving-related tasks are switched between the two driving agents (driver and automation), in shared control, they are both involved in the same task at the same time. It should be noted that the use of warning and decision support systems is not considered a shared control technique, as they are intended for scenarios in which the driver is the only driving agent. Similarly, systems such as Electronic Stability Program (ESP), where the system detects loss of steering control and performs individual wheel braking corrections, cannot be considered shared control, as they imply tasks that the human driver can not perform by itself (Abbink et al., 2018).
Therefore, in shared control, both driver and automation agents have the capacity to perform the driving dynamic task. However, achieving a congruent interaction is a non-trivial problem, as the actions of each agent at the operational level may differ. For this reason, an arbitration system is required to distribute the control authority between both agents (driver and automation), based on the information received (Figure 1). The variables used to perform this arbitration depend on the system design and the particular use case. For instance, in a lane-keeping system, the arbitration system may be based on the steering behavior of the human driver: this way, if the driver opposes the torque applied by the automation, the arbitration may give full control to the driver, so that it can perform an overtaking, for instance.
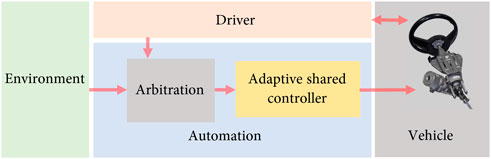
FIGURE 1. General structure of shared control systems.
Moreover, the arbitration system may include a more complex layer that evaluates the fitness of the human driver to perform the driving task. This way, based on the data provided by a Driver Monitoring System (DMS) (Nguyen et al., 2017), the arbitration system may decide to reduce the control of the driver and give it to the automation system in order to maintain overall safety. The evaluation of the fitness of the driver can also be performed by other approaches, such as driver models, which predict the behavior of the driver (Lazcano et al., 2021); or safety variables such as Time to Collision (TTC) (Muslim and Itoh, 2017) or Time to Lane Crossing (TTLC) (Marcano et al., 2021).
The complexity of the arbitration system is closely related to the complexity of the control algorithms required. For instance, if the arbitration system outputs a constant predefined value, the shared control output will be fixed. This is the case with basic Lane-Keeping Systems, where the transitions between the control of both agents are softened. However, in more complex scenarios, where the driver or environment-related components are involved, the arbitration is context-dependent, and more flexible controllers are required. The implemented controllers have to consider the balance between safety and comfort, minimizing the conflict between the actions performed by the driver and the automated system.
As previously stated, the basis of shared control is that the human driver is maintained in the control loop. This concept is apparently opposed to the effort in achieving increased levels of automation, as the ones defined by SAE J3016 (J3016c, 2021), where human driver duties are reduced as the level of automation increases. However, recent works (Litman, 2022) have stated that the complexity of achieving higher levels of automation will impact on the time required to implement fully autonomous vehicles. For this reason, automotive manufacturers such as Toyota, are developing their technologies not only towards full automation but also towards better collaborative behavior between the automation and the driver (Bobier-Tiu et al., 2022), by keeping the driver in the loop through the shared control modality.
Following this same trend, the scope established by the European Commission (Council, 2018) towards the future of transportation until 2030 is looking for an enhancement of the driver, rather than a substitution of it. This is clearly stated by some of its key goals:
• Overridable ADAS systems: safety is positioned as the main objective. Hence, the driver must still be the main fallback in hazardous situations.
• Fitness to drive: Monitoring of the driver is encouraged to avoid the use of the vehicle under improper conditions like fatigue, distractions, or being under the effects of illicit substances.
• Continuous training and education: in the scope of an aging population, where the mean age of drivers is increasing, the institutions want to make sure that all licensed drivers are able to fulfill all driver tasks. This is already an implemented practice in Japan, where every time they renew their driving license, they need to take some mandatory lectures1.
Based on these goals, multiple research projects2 related to human-machine interaction in automated vehicles have been proposed.
Consequently, it can be concluded that manufacturers and institutions consider that the role of the driver will still be important in the following years and that the development of not only fully automated vehicles, but also cooperative control approaches, such as shared control, is key in the future of transportation. In fact, understanding the driver as an essential agent in road transport brings the necessity to improve the development, validation, and evaluation methods to study the shared control systems. Our previous review (Marcano et al., 2020) detailed the different works focused on the development and validation of shared control approaches, yet the evaluation methodology considering the human driver was not considered.
For this reason, the goal of this work is to provide an overview of the proposed works in the literature related to the development and experimental evaluation using human drivers of shared control systems. In this sense, the major contributions of the paper are the following:
• To provide an updated status on how systems based on shared control have been evaluated previously.
• To present a compilation and categorization of objective and subjective metrics.
• To offer researchers a reference to develop future studies for shared control systems in automotive.
The paper is organized as follows. Section 2 presents the methodology followed for the literature review. In Section 3, the collected works are described and classified. Section 4 presents a classification of objective and subjective metrics focused on shared control studies. Section 5 highlights the conclusions and recommendations extracted from the review.
The scientific literature for this review comes from various databases, including Google Scholar, IEEE Xplore, and ScienceDirect. Different keywords related to shared control in automated driving were used, such as shared steering control, haptic guidance, and steering torque. The literature search period lasted 9 months from January to September 2022. To provide the most recent status of the topic, only articles published since 2017 were considered. More than a hundred papers were found to be published until August 2022, and from those, the following selection criterion was applied to focus on those that experimentally evaluated the shared control system with real drivers:
• The work must be published in a scientific journal.
• The work proposes a shared control system, as defined by Abbink et al. (Abbink et al., 2018).
• The shared control approach is designed for vehicle automation applications using conventional actuation mechanisms (steering wheel or pedals).
• The experimental evaluation must include at least five real drivers.
From the initial search, a total of 20 papers were found to match the selection criteria (see Table 1). It is important to note that the focus of this review is the evaluation of the shared control system performed through experimental studies with real drivers. These studies imply higher complexity than those based only on simulations1, as proper experiment design, recruitment, and evaluation are required, which impacts in the detected number of works. Hence, this review is carried out in two phases, as shown in Figure 2. The first phase is the design of the experiment which is composed of the driver participants, the baselines, the use case, and the vehicle platform used in the study. The second phase is related to the evaluation of the study results through metric analysis, which is divided into three categories:
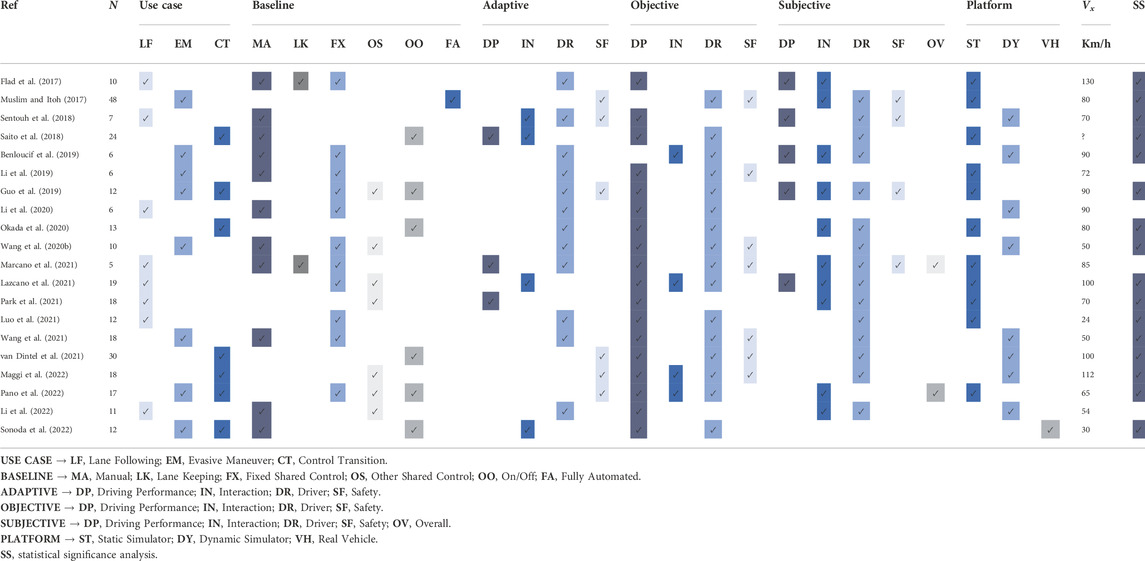
TABLE 1. Driver evaluation of shared control systems in automated driving.
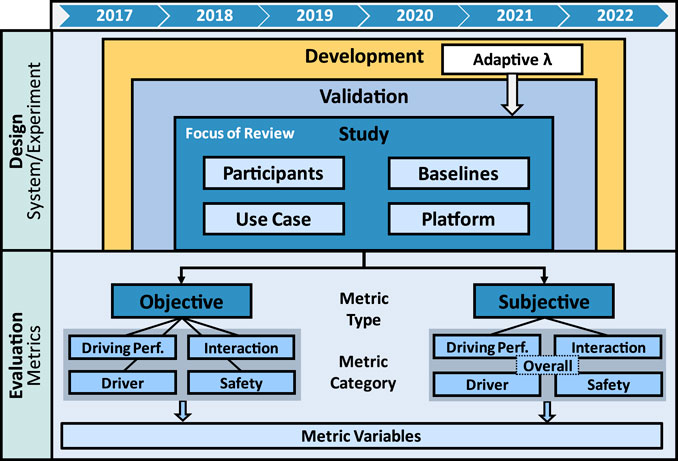
FIGURE 2. Methodology used to obtain the literature review and the metrics categorization.
• Metric Type: A division is made between objective (quantitative) and subjective (qualitative) metrics.
• Metric Category: Four high-level categories were defined to encompass related metrics. One for the Driving Performance of the system. Another one evaluates specific metrics of the Driver. A third one for the variables specific to the collaboration (Interaction) between the driver and the automation in the steering wheel, and one for the impact on road Safety. One additional category is included for the subjective evaluation, related to the Overall rating of the shared control system.
• Metric Variables: Each metric is assigned to a general variable, which is a part of a category as shown in Section 4. For example, for the objective metrics of Driving Performance, two variables are included (Path following and Control activity). Then different single metrics belong to each variable.
Figure 3 compiles an overall description of the evaluation design for the shared control approaches proposed in the 20 papers that matched the selection criteria of Section 2 (see Table 1).
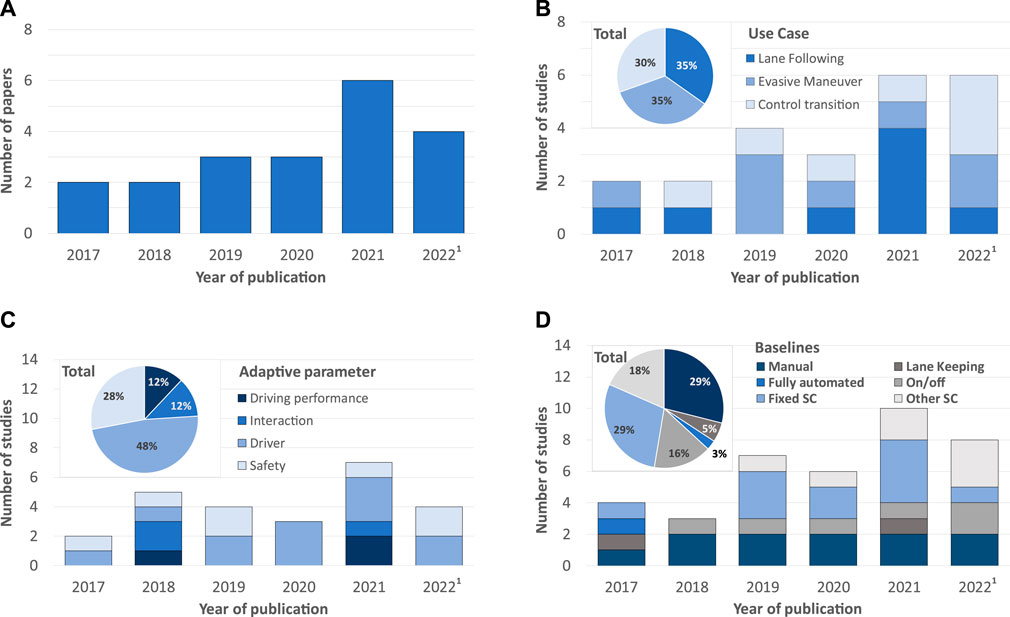
FIGURE 3. Evaluation studies on adaptive shared control: algorithm design (12022 is surveyed only until August). (A) Papers published by year. (B) Use case applications per year. (C) Adaptive shared control arbitration parameter categories studied per year. (D) Evaluation baselines studied per year.
Figure 3A depicts a steadily increasing number of works per year during the surveyed period. Note that the number reported for the year 2022 only includes publications before August. Yet, it already exceeds the total number of works for any full year prior to 2020. Furthermore, if the second half of 2022 replicates the first half, 2022 will exceed the 2021 number of papers. This projection indicates an increased research effort in the evaluation of shared control approaches in the last years.
The use cases per year studied in the analyzed works are shown in Figure 5B. These are classified into three main automated vehicle applications of adaptive shared control.
• To support the driver in a lane following task.
• To support the driver in an evasive maneuver.
• To improve handover in control transition events (both manual-to-automated and vice versa).
Note that some authors study the combinations of control transition strategies with evasive maneuvers, thus the number of use cases can be larger than the number of works. Overall, the three use cases have been addressed equally in the scope of this review. However, it is to be noted that as the number of works that focus on this topic is small, high variation exists. Nevertheless, works related to each use case exist in the last 3 years.
A key feature of shared control applications is the adaptive parameter, which modifies the level of haptic authority (in this case, the magnitude of the steering wheel torque produced by the lateral controller of the vehicle) (Abbink et al., 2012). The adaptive parameter impacts the authority according to the design of the arbitration system.
Figure 3C shows the distribution of the adaptive parameter classified by the four categories defined in the methodology (see Section 2). Most studies (48%) adapt the authority based on driver-related variables, such as distraction, drowsiness, hands position, or grip strength. Safety-related variables are the next option, with 28% of the studies devising parameters such as time-to-collision, distance-to-collision, time-to-lane crossing, or personalized driving risk indicators (Li et al., 2019). Interaction (e.g., torque conflict and driver torque) and driving performance (lateral error, angular speed, etc.) related parameters are equally addressed with 12% each.
The proper evaluation of a use case application requires the definition of appropriate baselines for comparison. Many studies in the review (29%) use manual driving as a baseline, which is consequent with shared control being a natural way to gradually introduce automated support to the driver. 29% of the studies benchmark against fixed authority (non-adaptive) shared control as a baseline, which, besides being a simpler application of shared control, comprises some commercial applications of lane centering functionalities that support the driver in following the lane without taking over full control of the vehicle. Next, with 18% of the cases and with an increasing trend, studies include comparison with other adaptive shared control strategies as baselines, which points to an increasing spectrum of options and iterations. 16% of the studied baselines fall in the on/off transition group, which is mainly used to benchmark control transition use cases. It is relevant to note, however, that only one case reports a comparison to a traded-control strategy (as the alternative to adaptive shared control) and thus, for the effects of this review, falls within the on/off category. Another comparison to commercially available approaches is the lane-keeping baseline (5%), which allows the driver freedom to drive within certain boundaries, with the automation only intervening when the vehicle crosses lanes. Finally, even if one might expect that the two limiting conditions for shared control (i.e. driver fully in control vs. automation fully in control) would be common baselines, that holds true only for manual driving, since comparisons to fully automated driving only account for 3% of the studies.
The experimental design of the studies is addressed in Figure 4. More than half (55%) of the studies use driver-in-the-loop static platform simulators, with all the limitations they might have for the evaluation of driver perception of haptic interactions. In 40% of the studies, dynamic platform simulators are used, which provide a more complete set of experiences for the participants, bringing haptic and inertial sensations. However, it is also stated that they are prone to produce motion sickness. In the scope of this review, the first and only publication of an evaluation study of adaptive shared control with a significant driver sample size performed on a real vehicle appears in 2022.
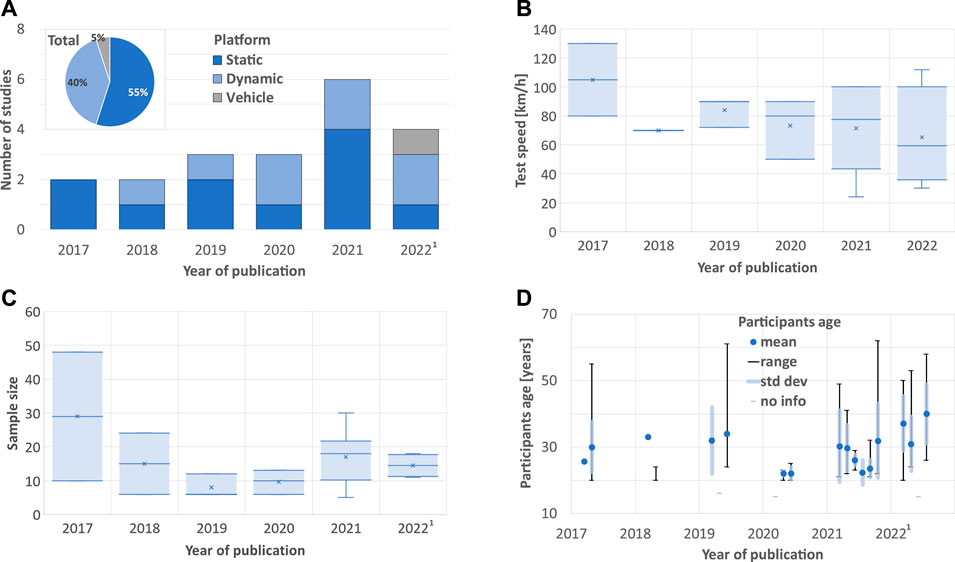
FIGURE 4. Evaluation studies on adaptive shared control: experimental design (12022 is surveyed only until August). (A) Platform types employed per year. (B) Test speeds studied per year. (C) Number of participants per study by year. (D) Age of participants per study by year.
Box plots on Figure 4B show that the studies have covered a wide range of test speeds, from those typical of urban scenarios to those common of highways (min = 24 km/h; max = 130 km/h; mean = 75.9 km/h). It is also apparent that there is a trend to have studies spread over a wider speed range every year.
Adaptive shared control is inherently dependent on human factors since the driver is an integral part of the system performing the driving task. As such, evaluation studies must account for the variability introduced by the human in the loop and perform tests with the participation of a significant amount of subjects. The classified studies show sample sizes with a minimum of five and a maximum of 48 participants, averaging 15.0 participants overall. As depicted in Figures 4A,C couple of the first studies classified in this review (in years 2017 and 2018) addressed larger numbers of participants, yet with simpler tests and platforms. From 2019 onward, the sample sizes show a slightly increasing trend, even under the effects of the pandemic restrictions. All the works in the review that perform statistical analysis (see Section 4) claim to have found some results with statistical significance. Yet, it is noted that the sample size required to warrant significant results depends on several factors such as the nature of the test, and the variables or metrics used, among others.
Test samples must not only be large enough to ensure the statistical significance of the results, but they must also be representative of the population of interest. Thus, as the age range of drivers (as potential users of adaptive share control) is very wide, and since age might be a conditioning factor on driver behavior, fitness, and technology acceptance, the information available about the participant’s age in the studies is compiled in Figure 4D. Some studies report average age, some report a range (maximum/minimum), and some report standard deviation, in different combinations (including some that provide no information). The available data are depicted for each individual study, grouped by the year of publication. The minimum reported age is 20 years and the maximum 62, while the reported means go from 22 to 40 (averaging 29.4 years). In the last years, the information tends to be more complete and the samples seem to more uniformly cover a wider range of ages. Yet, younger participants seem to be predominant in the tests, particularly in the years with stronger pandemic-related restrictions. Elder drivers (over 60) have not been addressed.
The articles reviewed in this work show some tendencies in terms of how shared control systems are evaluated. This section gathers these guidelines with respect to what are the most commonly evaluated metrics, and how they are subsequently analyzed.
After collecting all the used metrics from each study, the studied variables have been rearranged in order to obtain a general categorization of the shared control evaluation metrics. Following the main blocks of shared control shown in Figure 1, the metrics have been divided into four main categories:
• Driving performance: metrics related to the quality of the driving output obtained through the action of both the driver and the automation.
• Interaction: metrics related to the variables measured in the driving interface, that is, the steering wheel. As the steering wheel is the control actuator for both agents, the interaction metrics provide the measure of their collaborative behavior.
• Driver: metrics related to the driver’s status and feelings.
• Safety: metrics related to the effectiveness of the system to prevent accidents.
Additionally, it could be interesting to add a category of variables, parallel to the Driver ones, related to the Automation Status. It is to be expected that, in actual applications of shared control, variables related to the capability and reliability of the automation, which might be affected by ODD, weather conditions, system malfunctions, etc., will be addressed. Variables like the AD level provided by the system, the uncertainty in the environment perception, or the state of specific equipment are candidates for adaptive parameters that modify the authority. However, this is not observed in the current literature, probably because most of the studies are performed in driving simulators, where the automation system conditions are ideal. Thus this category has not been exploited here. Yet, it might be logical to assume that as the number of tests in real vehicles increases, their status-related variables will be studied.
In the following subsection, the gathered metrics from the reviewed studies are sorted into the aforementioned categories, both quantitatively and qualitatively.
This section focuses on the variables from the studies analyzed which were evaluated by measuring a specific metric. The collected variables and metrics are shown in Table 2. Regarding the data provided in this table, the following remarks have to be taken into account:
• The aim of this review is not to show all the possible variables related to shared control in each category, but to show the most relevant ones, according to the most relevant studies on this topic.
• Many studies differentiate between a metric and its derived calculations. For the review, the extrapolated calculations have been grouped and are considered under the umbrella of the original metric.
• Some metrics are repeated along different variables and categories. A good example of this is the driver torque or the steering wheel reversal rate. The reason for this is that, depending on the variable of interest, one metric can be proven to be useful to measure different variables. In the case of the driver torque, for instance, it is used to measure the control activity of the vehicle, the interaction between the driver and the automation, and to measure the workload of the driver. In each of the cases, metrics derived from the driver’s torque might be used.
• The references marked with an * are shared control papers which did not pass through the methodological filter. However, it has been observed during the research that topics like Attention level, Drowsiness, or Secondary tasks are very frequent in shared control. For that reason, specific shared control papers with representative use of those metrics have been added to complete these tables.
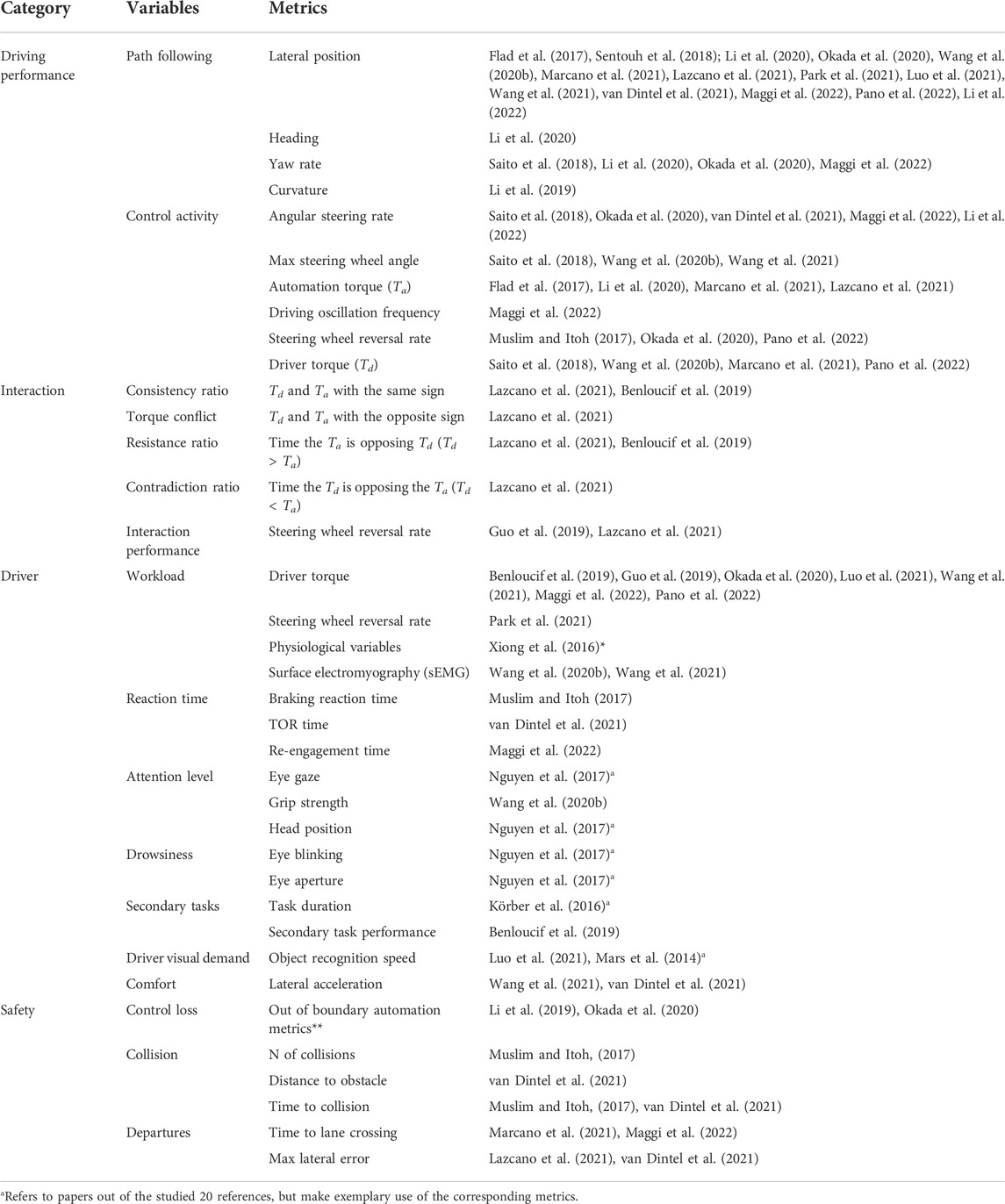
TABLE 2. Objectives metrics categories for evaluation of shared control systems in automated driving.
As shown in Figure 5A, the Driving Performance category metrics are the most used ones. Regardless of the use case, most of the studies evaluate the path following performance and the control activity of the system. This is observed in metrics such as the lateral position, yaw rate, and angular steering rate, which are present in most of the studies. However, the number of different metrics is not very high. This implies that obtaining the driving performance of a system is a more mature study case.
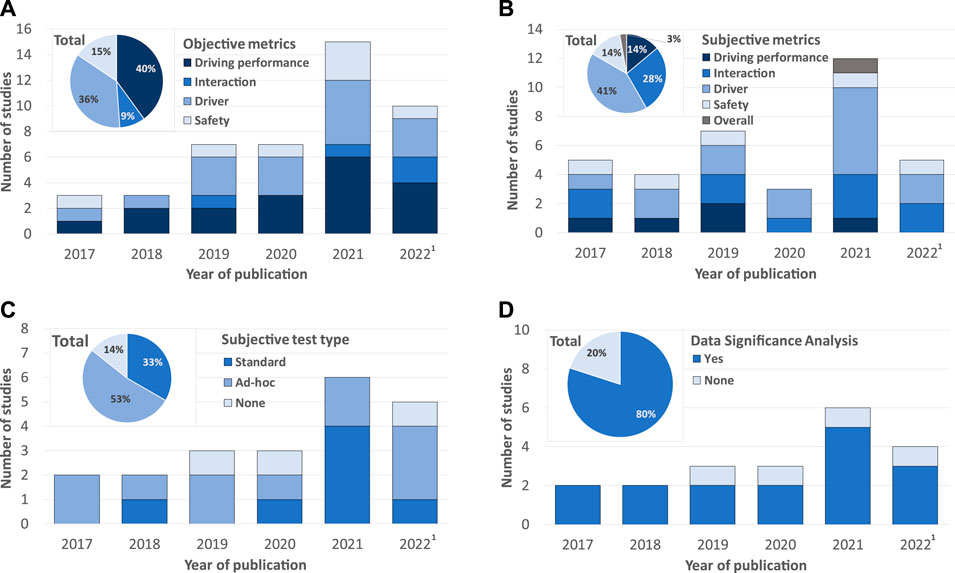
FIGURE 5. Evaluation studies on adaptive shared control: test metrics (12022 is surveyed only until August). (A) Objective metric categories per study by year. (B) Subjective metric categories per study by year. (C) Subjective test type per study by year. (D) Data significance analysis per study by year.
The second most used metrics are related to the driver. This time, however, the number of variables evaluated is higher. There are more variables associated with different use cases of the driver, and they are not so frequently repeated along different papers. In many cases, getting these metrics requires some specific equipment, varying from easy-to-obtain torque signals, to a more elaborated driver monitoring system with eye gaze tracking or head position detection. Other cases go further beyond and measure physiological signals, which are intrusive for the driver and may influence the use case, if not properly used.
Regarding the interaction variables, they are mainly evaluated based on the driver and automation torque. Here, the steering wheel takes a major role, as both the driver and the automated system act over the vehicle actuation mechanism, and they both receive information from it. So, it has the double functionality of an actuator and a haptic HMI. However, interaction variables are not so extensively studied (they are the least studied out of the four categories), so there is yet little consensus about what are the main variables that describe best the interaction.
Finally, most of the safety-related metrics are associated with obstacle avoidance and lane-keeping use cases, where collisions or lane departure situations may arise. Yet, they play a minor role in these studies. Only 35% of the studies objectively evaluate the safety impact of the shared control system. If shared control is going to be an alternative to autonomous driving, more efforts should be done not only to demonstrate that the interaction between driver and automation is comfortable, but also that an improvement in road safety is achieved. Therefore, more safety analyses are expected in upcoming evaluation studies.
These metrics are related to the perception of the participants. Due to the related subjective human factors, it is easy to fall into biased results, so they require a methodological approach and a significant population sample to be properly evaluated.
The variables measured qualitatively from the previous studies are summarized in Table 3. To provide a better correlation across objective and subjective measures, the main categories have been maintained for both cases. The common way to measure qualitative metrics is through questionnaires. This can be differentiated into two categories: standardized questionnaires and ad-hoc questionnaires (Figure 5C). Standardized questionnaires have higher reliability in their results as they have been thoroughly tested. However, they require more planned and structured studies. In the table, the standardized metrics are marked with an asterisk (*), and they are related to usability, trust, acceptance, and workload. Ad-hoc questionnaires are designed by the researchers carrying out the study. They are used to get more specific information, but it is important to keep a methodological workflow to avoid biasing the experiments. In most cases, scales are used to obtain numeric data on the different variables, with regard to subsequent statistical analysis.
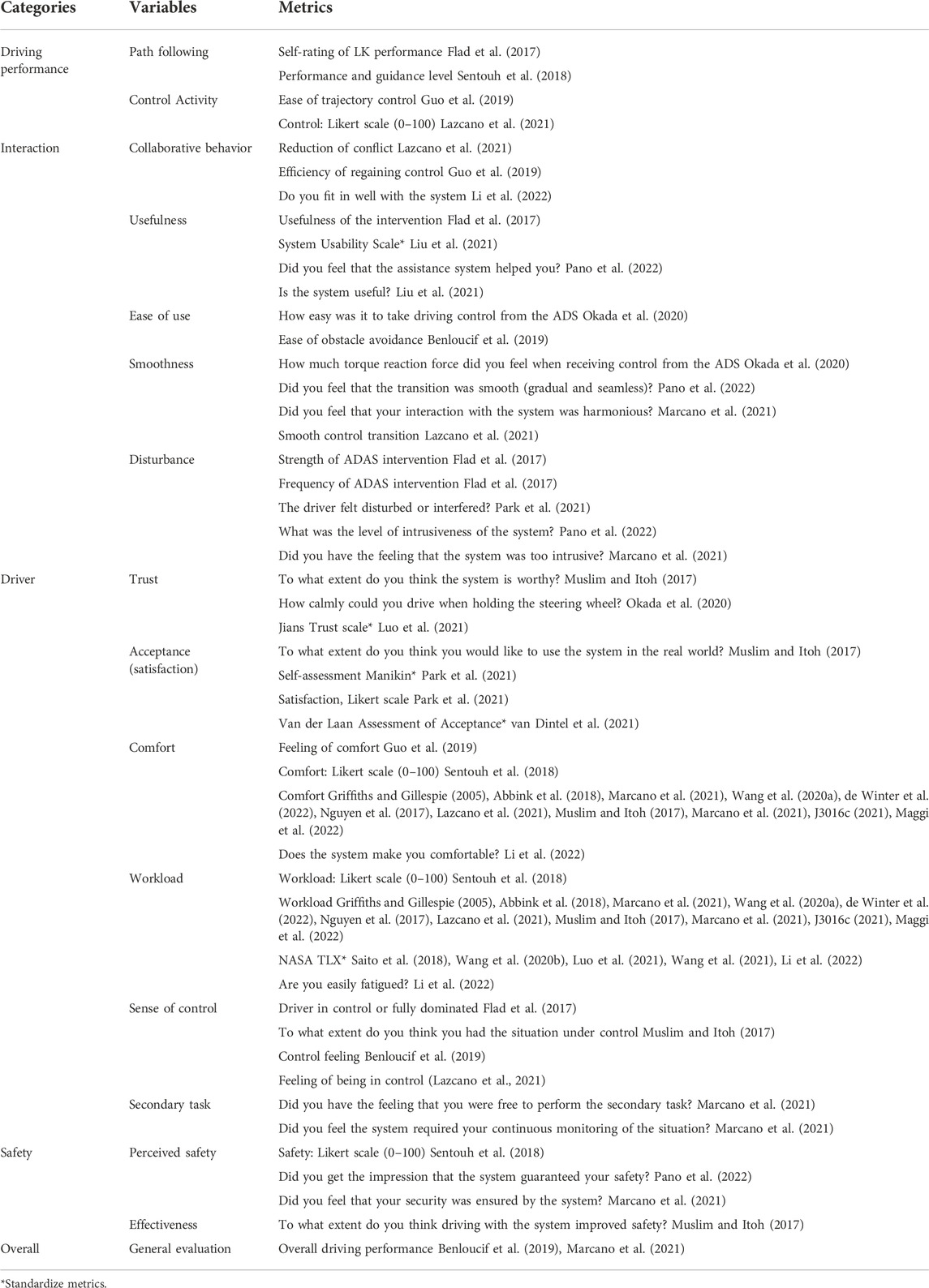
TABLE 3. Subjective metrics categories for evaluation of shared control systems in automated driving.
Apart from the four main categories, an extra category of the overall system has been added, as it is widely used in the reviewed works. This is especially useful to have a general overview of the system and serves for comparison with the tendency of the objective measures.
Regarding the number of metrics per category, it can be observed in Figure 5B that the main studied ones are the driver and the interaction, while the driving performance has a clear decrease compared to the objective measurements. This comparison suggests that, when having the possibility to measure both cases, objective data is preferred, while interaction and driver-related data can be more easily obtained through questionnaires rather than using specific equipment for objective measures. However, using both sources of data, where the subjective measures complement the objective one, is the preferred case.
As the human factor is, by definition, a key parameter in shared control applications, the statistical significance of the results derived from the studies needs evaluation. Figure 5D shows that 80% of the studies reviewed perform a statistical significance analysis of their results. Furthermore, 62% of them carry out an Analysis of variance (ANOVA), showing it as the main statistical tool for the analysis of the results in shared control studies.
Table 4 shows the distribution of the statistical methods used by the different authors in the reviewed studies. The different approaches have been categorized regarding the number of independent data samples used (rows) and the type of data (columns). The table is structured from top to bottom and center to side. The studies that make use of the corresponding method are referenced in the table.
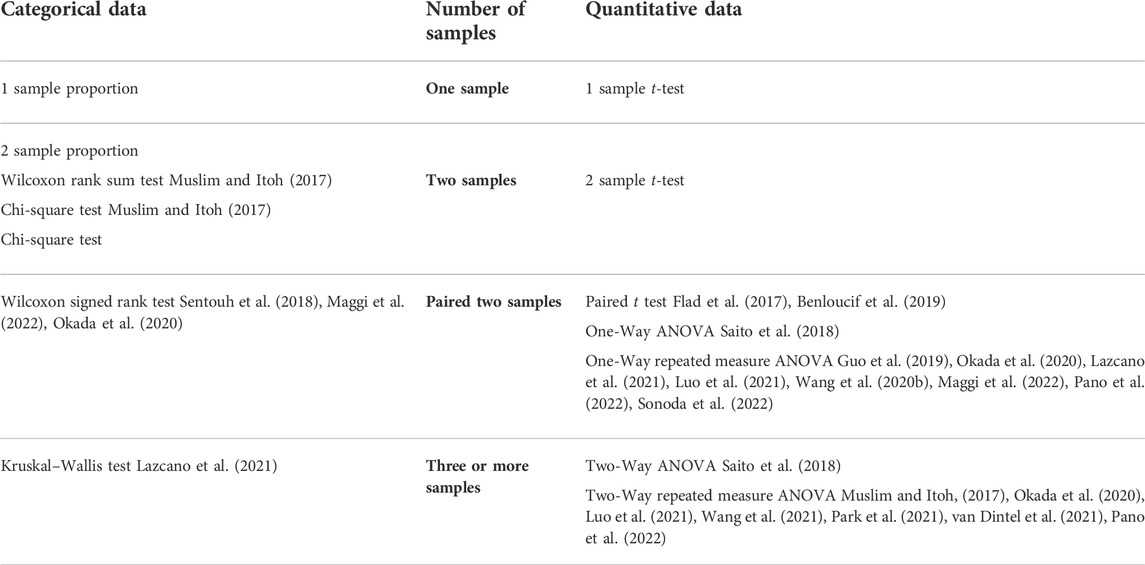
TABLE 4. Data significance analysis for evaluation of shared control systems in automated driving.
Regarding quantitative data, most of the reviewed studies seek statistical significance through the Analysis of Variance (ANOVA) approach. This method allows for relating and comparing multiple variables related to different samples. In many cases, it is observed that this approach is used to compare different driving modes. In others, different driving scenarios or driver states are considered independent factors.
When considering 1-way or 2-way ANOVA tests, repeated measures ANOVA are mainly used. For that, within-subject tests are performed, where the same participants test different driving modes or scenarios. For instance, when comparing driving modes, the participants testing the baseline mode are the same ones testing the shared control system. This increases the statistical power and requires fewer participants for the tests (a between-subjects test would require a new group of participants per sample).
However, ANOVA tests in general, and repeated measures ANOVA particularly, require specific care for proper use, as they incorporate the prerequisites of randomness, independence, and normality. That is, the order of the tests should not influence the results, the obtained data samples must be independent and all groups must have the same variance (as the null hypothesis assumes normal distribution). Firstly, when doing within-subjects tests, the order of the tests must be counterbalanced or randomized to seek randomness in the tests. Secondly, learning effects or fatigue may affect the independence of the tests, so special care should be taken with the duration of the tests and the pre-tests practices. Thirdly, uneven variances in samples may result in biased and skewed test results. To avoid this, direct comparisons between two groups (like t-tests) may simplify and reduce the probability to misuse the ANOVA.
Just two studies, (Muslim and Itoh, 2017), and (Saito et al., 2018) performed an unpaired between-subject test, requiring a higher effort in time and the recruitment of participants for the studies. Typical statistical tests, like a t-test (and their categorical equivalents), are included in the table to stress that paired tests and three or more sample tests are the predominant profile of study in this area.
For ANOVA tests, once overall statistical significance is found, follow-up tests are conceived, to assess which specific groups or variables statistically differ from each other. It is observed that in most cases, there are no a priori defined tests, and studies mainly fall in the post hoc test side. In this case, the most used tests are the Bonferroni corrections, Tukey HSD, Fisher-Hayter, and Bartlett’s tests.
On the other side, regarding categorical data, the most extended tests are the Wilcoxon rank sum test and the signed-rank test. These tests have been observed in this review to be particularly useful for qualitative results analysis, as the type of data is non-parametric, and the number of participants is not large enough to assume it has a normal distribution (by the central limit theorem). The same applies to the Kruskal–Wallis test, also known as the 1-way ANOVA on ranks.
This paper presents a review of the evaluation methodologies used in shared control systems that have been tested with real drivers over the last 6 years. In addition, a categorization of the most common metrics was performed, for both types of metrics: objective (categorized in Driving Performance, Driver, Interaction, and Safety) and subjective (using the same categories with the inclusion of the Overall performance). Moreover, Figure 6, shows a guideline to use this review as a tool to help in the design and development of evaluation studies for shared control systems in automated vehicles.
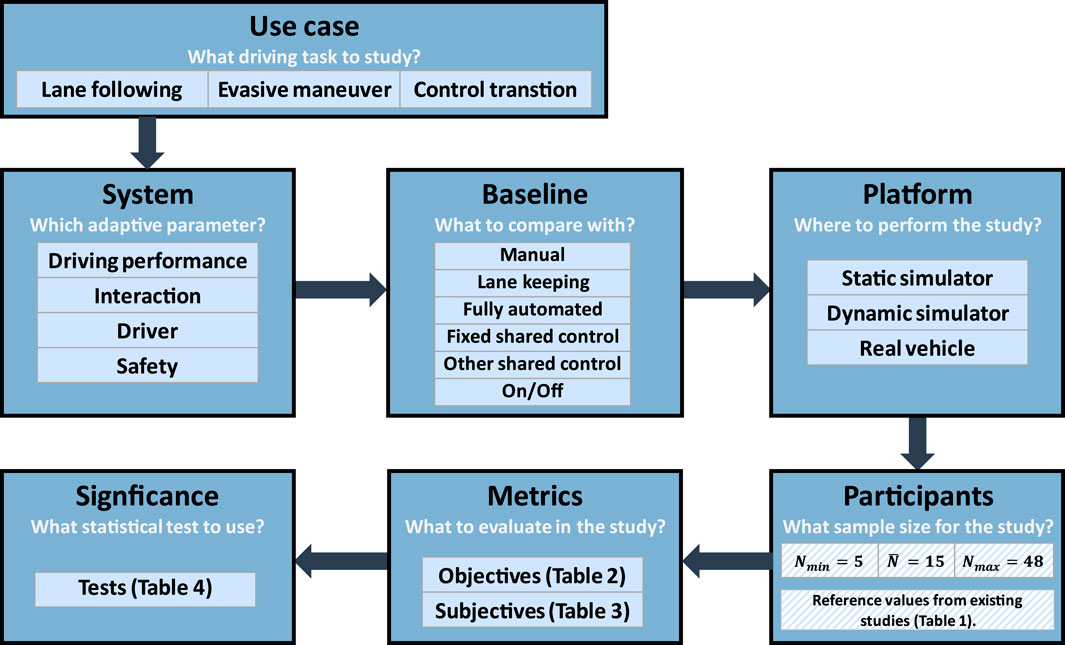
FIGURE 6. Guideline to perform an evaluation study for shared control in AV, according to the review findings.
In addition, the main findings of this review are summarized below:
• Number of works: The results show that interest in shared control for AVs continues to grow over the years, not only in algorithm development and validation but also in system evaluation by real drivers, predicting the increasing maturity of this technology.
• Use cases: Lateral shared control keeps being studied to a greater extent compared to longitudinal control applications (i.e., haptic pedals). Lane following, evasive maneuvers, and control transition are well distributed between the use cases. Yet, the latter is being studied more in the last 2 years. This is an important aspect because, as noted by Abbink et al. “Shared control finds its highest safety utility in circumstances where situations and conditions can rapidly change beyond the envisioned design boundaries of the robot, and where rapid adaptation in human involvement is needed to maintain system integrity”. Therefore, the study of control transitions, especially due to unexpected events where a takeover request is made, is a scenario that should be evaluated on a larger scale to demonstrate if shared control can help in adjusting the driver from the supervisor role to the driving role.
• Baselines: Development of SC algorithms is flourishing and different researchers and groups are addressing a great variety of options and strategies, where even different SC strategies are being compared in many evaluation studies. Thus, firm ground for evaluation and comparison is needed at this point to help on shaping future developments and their actual implementations. In particular, comparison against traded control, as the competing technology, has not been properly addressed yet, and therefore it is encouraged in upcoming studies (similar to (van Dintel et al., 2021)), as only a few have investigated the effects of the shared and traded control modalities in scenarios where a take-over request is issued.
• Adaptive parameter: Most studies (48%) adapt the authority based on driver-related variables. Of particular interest is the growing number of works addressing systems dependent on the driver state. This is relevant at least for two aspects. First, inappropriate driver state while driving is a known major cause of vehicle accidents (Singh, 2015). Second, as stated by Abbink et al. (Abbink et al., 2018) in their axioms of shared control “shared control finds its highest performance utility in circumstances where a human’s situated control, perception, or cognitive ability is the main limiting factor for the combined performance, and where the robot complements these human abilities”. In this sense, support for distracted drivers is an application where shared control can provide enormous benefits for the driving task.
• Platform: In line with the previous review (Marcano et al., 2020), driving simulators are the preferred method for testing shared control systems. Dynamic driving simulators appear to be more commonly used according to the present review. Additionally, as a milestone for shared control in automated vehicles, Sonoda et al. presented the first driver study in a real car (Sonoda et al., 2022) ((Erlien et al., 2016) back in 2016 used an experimental platform).
• Speed: Test speed ranges are growing, and tend to cover the full spectrum from urban (30 kph) to highway (120kph).
• Participants: Sample sizes average 15 participants and the later ones tend to cover relatively well a wide driving age range, yet, in general, the younger drivers are predominant and no elder drivers have been addressed.
• Objective metrics: Most metrics focus on driving performance, and driver-related variables, while very few study the driver-automation interaction in terms of cooperation while driving. Hence, new correlations are yet to be found for a better comprehension of the collaborative behavior between the driver and the automation.
• Subjective metrics: Most metrics focus on driver-related variables, and the interaction is evaluated with more emphasis in comparison to objective metrics. Most subjective evaluation tools are ad-hoc questionnaires. Standard questionnaires are more related to driver trust, acceptance, and workload. Additionally, subjective studies may present high dispersion in the results, so they require a significant effort in gathering the appropriate number of participants and having a methodological procedure to avoid falling into study biases.
• Results analysis: within-subject experiments with paired data samples are the most used type of studies in this field, which allow having fewer participants to obtain statistical significance. The most used method is the repeated measures ANOVA. However, drawbacks of order effects, data independence, and even variances in samples may hinder the attainment of correct results. To avoid that, counterbalancing or randomizing the order of the tests, fatigue and learning effects avoidance, and avoiding uneven variances in samples are encouraged practices.
This document reflects only the author's view, the European Climate, Infrastructure and Environment Executive Agency (CINEA) is not responsible for any use that may be made of the information it contains.
JS: SoA search and analysis, categorization, writing and editing. MM: methodology, SoA search and analysis, drafting, writing, and editing. JPé: reviewing and editing. AZ: reviewing and editing. SD: conceptualization, SoA search and analysis, writing, reviewing, and editing.
All authors contributed to the article and approved the submitted version.
This work is supported by the EU Commission HADRIAN project and the Government of the Basque Country by means of AUTOEV@L project (KK-2021/00,123). HADRIAN has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 875597.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
1https://www.japanlivingguide.net/living-in-japan/transportation/renew-drivers-license/.
Abbink, D. A., Mulder, M., and Boer, E. R. (2012). Haptic shared control: Smoothly shifting control authority? Cogn. Technol. Work 14, 19–28. doi:10.1007/s10111-011-0192-5
Abbink, D. A., Carlson, T., Mulder, M., Winter, J. C. D., Aminravan, F., Gibo, T. L., et al. (2018). A topology of shared control systems-finding common ground in diversity. IEEE Trans. Hum. Mach. Syst. 48, 509–525. doi:10.1109/THMS.2018.2791570
Benloucif, A., Nguyen, A. T., Sentouh, C., and Popieul, J. C. (2019). Cooperative trajectory planning for haptic shared control between driver and automation in highway driving. IEEE Trans. Ind. Electron. 66, 9846–9857. doi:10.1109/TIE.2019.2893864
Bobier-Tiu, C. G., Koehler, S. M., Brown, M., and Ahumada, M. (2022). A unified mpc envelope control formulation for toyota guardian and chauffeur. IFAC-PapersOnLine 55, 19–24. doi:10.1016/J.IFACOL.2022.08.075
Council, E. T. S. (2018). Briefing: 5th eu road safety action programme 2020-2030. Brussels: ETSC (European Transport Safety Council).
De Winter, J. C. F., Petermeijer, S. M., and Abbink, D. A. (2022). Shared control versus tradedcontrol in driving: A debate around automation pitfalls. Ergonomics. In press.
Erlien, S. M., Fujita, S., and Gerdes, J. C. (2016). Shared steering control using safe envelopes for obstacle avoidance and vehicle stability. IEEE Trans. Intell. Transp. Syst. 17, 441–451. doi:10.1109/TITS.2015.2453404
Flad, M., Frohlich, L., and Hohmann, S. (2017). Cooperative shared control driver assistance systems based on motion primitives and differential games. IEEE Trans. Hum. Mach. Syst. 47, 711–722. doi:10.1109/THMS.2017.2700435
Griffiths, P. G., and Gillespie, R. B. (2005). Sharing control between humans and automation using haptic interface: Primary and secondary task performance benefits. Hum. Factors 47, 574–590. doi:10.1518/001872005774859944
Guo, C., Sentouh, C., Popieul, J. C., and Haué, J. B. (2019). Predictive shared steering control for driver override in automated driving: A simulator study. Transp. Res. Part F Traffic Psychol. Behav. 61, 326–336. doi:10.1016/J.TRF.2017.12.005
[Dataset] J3016c (2021). Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles - sae international.
Körber, M., Gold, C., Lechner, D., and Bengler, K. (2016). The influence of age on the take-over of vehicle control in highly automated driving. Transp. Res. Part F Traffic Psychol. Behav. 39, 19–32. doi:10.1016/j.trf.2016.03.002
Lazcano, A. M., Niu, T., Akutain, X. C., Cole, D., and Shyrokau, B. (2021). Mpc-based haptic shared steering system: A driver modeling approach for symbiotic driving. Ieee. ASME. Trans. Mechatron. 26, 1201–1211. doi:10.1109/TMECH.2021.3063902
Li, M., Song, X., Cao, H., Wang, J., Huang, Y., Hu, C., et al. (2019). Shared control with a novel dynamic authority allocation strategy based on game theory and driving safety field. Mech. Syst. Signal Process. 124, 199–216. doi:10.1016/J.YMSSP.2019.01.040
Li, R., Li, Y., Li, S. E., Zhang, C., Burdet, E., and Cheng, B. (2020). Indirect shared control for cooperative driving between driver and automation in steer-by-wire vehicles. IEEE Trans. Intell. Transp. Syst. 22, 7826–7836. doi:10.1109/TITS.2020.3010620
Li, W., Li, Q., Member, G. S., Li, S. E., Member, S., Li, R., et al. (2022). Indirect shared control through non-zero sum differential game for cooperative automated driving. IEEE Trans. Intell. Transp. Syst. 23, 15980–15992. doi:10.1109/TITS.2022.3146895
Litman, T. A. (2022). Victoria transport institute. Victoria, Canada: The Victoria Transport Policy Institute.
Liu, P., Jiang, Z., Li, T., Wang, G., Wang, R., and Xu, Z. (2021). User experience and usability when the automated driving system fails: Findings from a field experiment. Accid. Analysis Prev. 161, 106383. doi:10.1016/j.aap.2021.106383
Luo, R., Weng, Y., Wang, Y., Jayakumar, P., Brudnak, M. J., Paul, V., et al. (2021). A workload adaptive haptic shared control scheme for semi-autonomous driving. Accid. Analysis Prev. 152, 105968. doi:10.1016/J.AAP.2020.105968
Maggi, D., Romano, R., and Carsten, O. (2022). The effect of inconsistent steering guidance during transitions from highly automated driving. Accid. Analysis Prev. 167, 106572. doi:10.1016/J.AAP.2022.106572
Marcano, M., Díaz, S., Perez, J., and Irigoyen, E. (2020). A review of shared control for automated vehicles: Theory and applications. IEEE Trans. Hum. Mach. Syst. 50, 475–491. doi:10.1109/THMS.2020.3017748
Marcano, M., Tango, F., Sarabia, J., Castellano, A., Pérez, J., Irigoyen, E., et al. (2021). From the concept of being “the boss” to the idea of being “a team”: The adaptive co-pilot as the enabler for a new cooperative framework. Appl. Sci. 11, 6950. doi:10.3390/APP11156950
Mars, F., Deroo, M., and Hoc, J. M. (2014). Analysis of human-machine cooperation when driving with different degrees of haptic shared control. IEEE Trans. Haptics 7, 324–333. doi:10.1109/TOH.2013.2295095
Muslim, H., and Itoh, M. (2017). Haptic shared guidance and automatic cooperative control assistance system: Performance evaluation for collision avoidance during hazardous lane changes. Hum. Factors 10, 460. doi:10.9746/JCMSI.10.460
Nguyen, A. T., Sentouh, C., and Popieul, J. C. (2017). Driver-automation cooperative approach for shared steering control under multiple system constraints: Design and experiments. IEEE Trans. Ind. Electron. 64, 3819–3830. doi:10.1109/TIE.2016.2645146
Okada, K., Sonoda, K., and Wada, T. (2020). Transferring from automated to manual driving when traversing a curve via haptic shared control. IEEE Trans. Intell. Veh. 6, 266–275. doi:10.1109/TIV.2020.3018753
Pano, B., Chevrel, P., Claveau, F., Sentouh, C., and Mars, F. (2022). Obstacle avoidance in highly automated cars: Can progressive haptic shared control make it safer and smoother? IEEE Trans. Hum. Mach. Syst. 52, 547–556. doi:10.1109/THMS.2022.3155370
Park, K., Han, S. H., Lee, H., and Kwahk, J. (2021). Shared steering control: How strong and how prompt should the intervention be for a better driving experience? Int. J. Industrial Ergonomics 86, 103213. doi:10.1016/J.ERGON.2021.103213
Saito, T., Wada, T., and Sonoda, K. (2018). Control authority transfer method for automated-to-manual driving via a shared authority mode. IEEE Trans. Intell. Veh. 3, 198–207. doi:10.1109/TIV.2018.2804167
Sentouh, C., Nguyen, A. T., Benloucif, M. A., and Popieul, J. C. (2018). Driver-automation cooperation oriented approach for shared control of lane keeping assist systems. IEEE Trans. Control Syst. Technol. 27, 1962–1978. doi:10.1109/TCST.2018.2842211
Sonoda, K., Okada, K., Sato, K., Abe, G., and Wada, T. (2022). Does shared mode improve steering and vehicle motions during control transition from automated to manual driving in real passenger car? IEEE Access 10, 85880–85890. doi:10.1109/ACCESS.2022.3197885
van Dintel, K. M., Petermeijer, S. M., de Vries, E. J. H., and Abbink, D. A. (2021). Sae level-3 automation - comparison of traded and shared control. ATZ Worldw. 123, 26–33. doi:10.1007/S38311-021-0667-9
Wang, W., Na, X., Cao, D., Gong, J., Xi, J., Xing, Y., et al. (2020). Decision-making in driver-automation shared control: A review and perspectives. IEEE/CAA J. Autom. Sin. 7, 1–19. doi:10.1109/JAS.2020.1003294
Wang, Z., Suga, S., Nacpil, E. J. C., Yan, Z., and Nakano, K. (2020). Adaptive driver-automation shared steering control via forearm surface electromyography measurement. IEEE Sens. J. 21, 5444–5453. doi:10.1109/JSEN.2020.3035169
Wang, Z., Suga, S., Nacpil, E. J. C., Yang, B., and Nakano, K. (2021). Effect of fixed and semg-based adaptive shared steering control on distracted driver behavior. Sensors 21, 7691. doi:10.3390/S21227691
Keywords: shared control, system evaluation, automated vehicle, driver-automation cooperation, evaluation metrics
Citation: Sarabia J, Marcano M, Pérez J, Zubizarreta A and Diaz S (2023) A review of shared control in automated vehicles: System evaluation. Front. Control. Eng. 3:1058923. doi: 10.3389/fcteg.2022.1058923
Received: 30 September 2022; Accepted: 14 November 2022;
Published: 03 February 2023.
Edited by:
Chouki Sentouh, UMR8201 Laboratoire d'Automatique de Mécanique et d'Informatique Industrielles et Humaines (LAMIH), FranceReviewed by:
Wenshuo Wang, McGill University, CanadaCopyright © 2023 Sarabia, Marcano, Pérez, Zubizarreta and Diaz. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Mauricio Marcano, bWF1cmljaW8ubWFyY2Fub0B0ZWNuYWxpYS5jb20=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.