 Fabrice Le Bars
Fabrice Le Bars Robin Sanchez
Robin Sanchez  Luc Jaulin
Luc Jaulin  Andreas Rauh
Andreas Rauh - Lab-STICC, ROBEX, ENSTA Bretagne, Brest, France
Interval analysis is a numerical tool classically used for solving nonlinear equations in a guaranteed way. It has been shown that it can be used to build reliable nonlinear state estimators for dynamical systems. Numerous simulations inspired from real-life applications have shown the applicability of the approach. This paper proposes to implement an interval-based INS (Inertial Navigation System) in an actual robot to estimate its orientation and position. It shows that some types of outliers can be naturally handled by the fusion algorithm, while the resulting controller can be both fast and reliable. Experiments with an actual autonomous boat conclude this article.
1 Introduction
In mobile robotics, state estimation is often a tedious problem [see, e.g., Rohou et al. (2019)]. Indeed, estimating especially the position and the attitude of a robot is a common task usually handled nowadays by off-the-shelf AHRS/INS [Attitude and Heading Reference System/Inertial Navigation System, such as SBG Systems (2021) and iXBlue (2021)] or autopilots [cf. Meier et al. (2011); Dronecode (2021); ArduPilot (2021a); Paparazzi UAV (2021)], but the best of them run proprietary fusion algorithms that are often not extensively described, while the cheapest of them may run simple ones from the literature. Since there are more and more internal and external sensors that could be easily available to fuse data and estimate the attitude, and whenever possible, the position, different fusion methods can be used to try to estimate the true but unknown values as closely as possible taking into account numerous of the following limitations or criteria:
• Cost, dimension, weight, mutual disturbances, etc., of the sensors.
• Nonlinear relations between the different state variables, inputs, or outputs.
• Difficulty to find an accurate representation of the sensors and modeling errors.
• Depending on the situation, unforeseen problems may occur, leading to outliers, or to a deterioration of the sensor quality that cannot be explained from a physical point of view.
For a mobile robot designed for exploration (UAV, USV, UGV, or UUV1), there are several variables that we typically need to estimate, using different sensors or methods given here in a decreasing order of priority in typical conditions and with possible validity checks when available:
• Heading:
• True heading (usually with respect to the direction of the geographic North) can be computed by high-quality accelerometers and gyrometers such as those described in Paturel et al. (2015).
• For an outdoor mobile robot, true heading can also be obtained from a dual GPS2. Its validity depends usually on the number of visible GPS satellites, the level of reception, and the number of multipaths, which can be validated against the length between antennas that can be measured with a reasonable accuracy most of the time (this distance should be a constant, so even in cases when the user specified wrong values, this can still be a valuable validation condition). Also, the altitude difference between antennas can be compared with roll and pitch estimations, which can also be used to check that the GPS antennas are globally directed toward the sky (cf. ArduPilot 2021b).
• By integration of low-cost gyrometer values (a calibration procedure to estimate the bias is usually necessary) and with a known reference for a short time of integration. Saturations (e.g., due to fast movement or shocks) should be detected to validate the estimates.
• Magnetometers, if there is a good hard and soft calibration [cf. Promotion 2021, Robotique autonome (2021)] and an absence of dynamic magnetic disturbances (or a method to eliminate them from the data, e.g., by removing magnetometer spikes that are not consistent with the integration of gyrometer signals during a short time; knowing the magnetic vector in the area can also help), known magnetic declination (which assumes that the position and date are roughly known, which can be reasonably assumed for experiments in a limited area during several days, or if we have GPS data).
• GPS COG (Course Over Ground), if it can be assumed that the vehicle should not have significant lateral movements.
• Visual sensors, 2D lidars, sonars, or radars can sometimes also be used to improve the accuracy or to check the validity of the other sensors.
• Roll and pitch:
• A combination of three low-cost accelerometers together with gyrometers [see, e.g., Mahony et al. (2008), Premerlani and Bizard (2009), and Bonargent et al. (2020)]. This might require basic bias calibration, and some movement conditions might cause problems during initialization (related to the estimation of the gravity vector direction in the sensor data), even though those situations are commonly unlikely. Saturations also need to be checked.
• Triple GPS can be used by following the same idea already employed to estimate the heading. As suggested before, the initialization phase for the roll and pitch estimation from accelerometers and gyrometers might be sensitive to movement conditions, while the triple GPS might be robust against some of them, e.g., in the case where an AHRS restarts unexpectedly in the middle of a quadrotor flight.
• Rotation speeds: gyrometers are the typical way to get a quite robust estimate. They are typically necessary for the derivative term of PID (Proportional Integral Derivative) controllers.
• Altitude:
• GPS is able to get the altitude with a limited accuracy (10–20 m) in standard mode, a centimeter accuracy if RTK (Real-Time Kinematic) corrections are available.
• Relative altitude measurements (e.g., above ground or sea floor, or sea surface): lidar, echosounder, DVL (Doppler Velocity Log), or sonar.
• Pressure-based altitude measurements (depth when underwater): pressure sensor.
• Position: GPS, visual, lidar, radar distance, and/or angle sensors, see, e.g., the instantaneous localization techniques in Jaulin (2015).
• Speed: GPS, odometers, DVL, good quality accelerometers if there is a precise calibration and known reference with a short time of integration, or relative sensors. Note that depending on the sensors, it can be a speed with respect to ground, surface, or a fluid, and since it can be expressed in the robot coordinate system, a precise knowledge of the Euler angles (heading, roll, pitch, usually expressed as a rotation matrix) of the robot might be necessary to correctly estimate the absolute speed.
• Air/water speed: Pitot tubes, propeller log, electromagnetic speed log, or DVL.
As fallback, an initial state and some prediction model need to be found in case some necessary variables cannot be estimated by any sensor. Also, some variables are often correlated although not theoretically equal (e.g., pressure-based altitude vs. altitude with respect to ground vs. altitude provided by GPS), which leads to the necessity to sometimes make strong assumptions and approximations to be able to fuse them. Among the state variables described, the ones that are often the most sensitive in typical applications are the heading and the position, which, therefore, will be specifically studied in this paper. Indeed, they are prone to outliers when using low-cost sensors, or sensors are not easily available to measure them directly. A wrong estimation can easily cause the failure of the mission and even the loss of the robot.
Data fusion, uncertainty representation, and somehow inconsistencies are typically handled through Kalman filter-based techniques see (Kalman 1960). In this framework, good models with few nonlinearities are often required to get the best behavior, and uncertain variables are assumed to follow a Gaussian distribution, which can be represented through covariance matrices together with the state-space model of the robot. A Kalman filter-based solution is most of the time able to provide precise estimates; however, it is not much designed to detect inconsistencies and warn the user about it, so usually, those kinds of problems need to be handled as special cases, e.g., by multihypothesis filters in the embedded software (see also Xiong et al. (2013), where an interval Kalman filter is proposed in a context of fault detection).
In this paper, we propose to show how data fusion and inconsistencies can be dealt with naturally using interval analysis. The purpose is to show how interval methods could be used to better fit the requirements of a specific application. The fusion method based on interval arithmetic should be able to:
i) Determine better when there are sensors that contradict each other and, whenever possible, which or what to output.
ii) Estimate more reliably the uncertainties considering bounded sensor errors as well as some data transmission delays, to get a safer navigation for the mobile robot.
The results of experiments made with an autonomous boat designed for the exploration of rivers will be provided to visualize the proposed fusion procedure.
The Materials and methods section will present interval analysis and its use in the development of a simple interval-based INS designed for the reliable heading and position estimation of an autonomous boat. To validate the concept, comparisons with existing INS will be presented, and a focus on specific scenarios, where inconsistencies could occur, will be made. As prerequisite to build an observer and controller for real experiments, simulated state equations will be given. Finally, the Results section will show the results of a survey of a river made with the autonomous boat, and postprocessing methods will be proposed to estimate reliably the position of the robot during the experiment. The Conclusions and outlook on future work section will conclude the paper.
2 Materials and Methods
The representation of uncertainties can be made in different ways. In this section, we will present interval methods and show how they can be applied to the problem of heading and position estimation of a real autonomous boat. First, the Interval analysis section will describe the main concepts of interval analysis. Then a simple example (strongly related to our application) in the Data fusion with interval analysis section will detail how we can easily make data fusion with interval methods. Since inconsistencies may occur in any fusion process, the Dealing with inconsistencies section will demonstrate that by design, any interval fusion algorithm forces to think about countermeasures against inconsistencies and, in that way, helps to make the underlying system more reliable. The real system (an autonomous boat) used in the Results section to validate experimentally the methods will be presented in the Description of the autonomous boat section. The formalization of the interval-based heading estimation algorithm will be given in the Interval-based inertial navigation system section, together with some comparative tests to preliminary check its practical functioning before using it on a real autonomous robot. The Jet-boat simulator section will propose a dynamic model for our boat, which will be used in the Results section to get an interval-based position estimation using the same principle as the previously described interval-based heading estimation algorithm.
2.1 Interval Analysis
An interval [see, e.g., Moore (1979) and Jaulin et al. (2001)] is a closed connected subset of
Interval analysis has already been widely used for dynamical systems [cf. Rauh and Auer (2010); Ifqir et al. (2019)] and, in particular, in state estimation problems for real robots, such as indoor localization [cf. Desrochers et al. (2015)], outdoor localization [cf. Drevelle and Bonnifait (2013)], outlier handling [cf. Mourad-Chehade et al. (2012); Reynet et al. (2009)], validation of controllers [cf. Jaulin and Le Bars (2012b)], etc. An application to the heading estimation with the aid of a camera has also been made in Voges and Wagner (2018).
2.2 Data Fusion with Interval Analysis
Assume that you have a sensor, e.g., a compass, and another algorithm able to estimate the heading of the robot. The compass estimates an angle of 8°, and its documentation suggests its error is likely to be within 2°; therefore, we will represent its information with the interval
These interval operations improve the estimation of all variables, especially the robot heading and the compass bias [note that in practice, we would need to take care of modulo 360° problems when manipulating angles (see Desrochers and Jaulin 2016b)]. The procedure of refining the knowledge about x1, x2, and x3 is called contraction, and the corresponding operator is called a contractor (see Chabert and Jaulin 2009). Its practical usage is simplified using the work of Chabert (2021) and especially Desrochers (2021), or its generalization by Rohou (2021) 4. Note that when we lack a priori knowledge about a variable, its corresponding interval needs to be initialized to
2.3 Dealing With Inconsistencies
Handling inconsistencies is often less natural when using probabilistic methods, such as Kalman-based filters, while it is a significant point with set-membership methods. Although outliers can usually be rejected using methods such as the Mahalanobis distance [see Mahalanobis (1936)] or RANSAC [see Fischler and Bolles (1981)] in cases where a reasonable amount of data is available, there are no general methods to detect and remove inconsistencies, especially when only two or three data points are available, and a model is difficult to formalize. Interval analysis can help in debugging: developing algorithms based on it shows that often several programming errors could have been left unnoticed in the embedded code if other kinds of methods were used, while interval methods quickly show empty sets or unexpected precise intervals when there is a problem. Indeed, the interval intersection described previously is efficient in cases where any outlier should be detected as far as possible. In the cases where a specific number of outliers is expected in normal operation, the q-relaxed intersection [cf. Jaulin (2009)] could be used instead.
2.4 Description of the Autonomous Boat
An autonomous boat has been used to demonstrate the use of interval methods for heading and position estimation (see Figure 1).
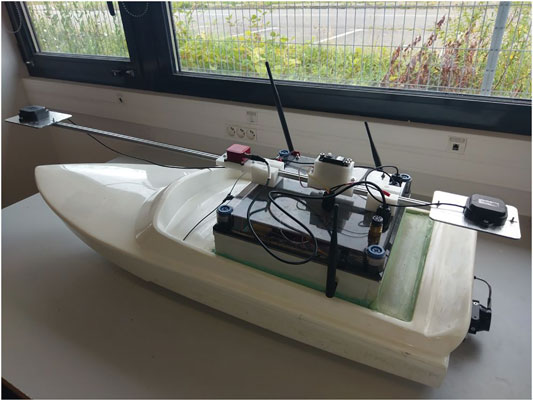
FIGURE 1. Autonomous boat with an interval-based inertial navigation system (INS).
It is based on a 1-m long hull (MHZ PowerBoats Jetsprint-Jetboat) that is equipped with a jet propeller (MHZ PowerBoats Jet 52) to control its speed and with a servomotor to control the direction of the water jet. On the boat we have:
• A dual GPS (ArduSimple simpleRTK2B+heading, with two u-blox GNSS multiband antennas ANN-MB-00) to get the absolute position, speed over ground (SOG), course over ground (COG), as well as true heading of the robot (note although it could be possible, we did not use RTK corrections for the position estimates).
• An AHRS (SBG Ellipse2-A-G4A3-B1, with full scale of gyrometers of 450°/s and accelerometers of 16 g) to get the Euler angles and their derivates. Note that the accelerometers inside are not precise enough to estimate correctly the position; they are only used internally for the angle computations.
• A DVL (Teledyne Wayfinder), to get the forward and lateral speed of the robot, especially when exploring narrow rivers, where GPS obstructions may occur on its banks. The distance to the river floor is also measured and can be used to generate a height map of the covered area.
More information about the design of this autonomous boat is available in Sanchez (2021).
2.5 Interval-Based Inertial Navigation System
2.5.1 Principle of Operation
The purpose of this first interval-based INS is to estimate reliably the heading ψ of the boat as an interval
where
• For all
• For multiple time instants
• For all
In 2D, the vertical gyrometer is measuring the heading velocity, so we have:
If we apply at each time step the contraction procedure described in the Data fusion with interval analysis section, the observation equation in combination with Eq. (3) will provide precise intervals for
2.5.2 Comparison With Alternative Systems
To get a first validation of the interval-based INS designed, comparisons with other systems have been made7. A first experiment has been set up with a high-end iXBlue QUADRANS Fiber-Optic Gyrocompass (FOG) INS (see Figure 2) as a kind of ground truth to get a first idea on the precision of our system. Both systems have been mounted together and moved manually with various rotations and oscillations at different speeds (only planar movements, see Figures 3 and 4). The mean error and the standard deviation between the systems are both around 1.5°, which means that there was probably a physical bias of 1.5° between the two systems, and assuming the QUADRANS is the ground truth (specifications suggest an error of less than 0.2°), the interval-based INS has a typical error of 1.5°8, which seems small enough for the autonomous boat used as a target system to be able to follow a track within the typical precision of a standard GPS, as it will be demonstrated in the Online control results in real experiments section (also, note that the typical error of an SBG Ellipse2-A-G4A3-B1, whose hardware—especially the gyrometers—is used in the interval-based INS, is around 1°).
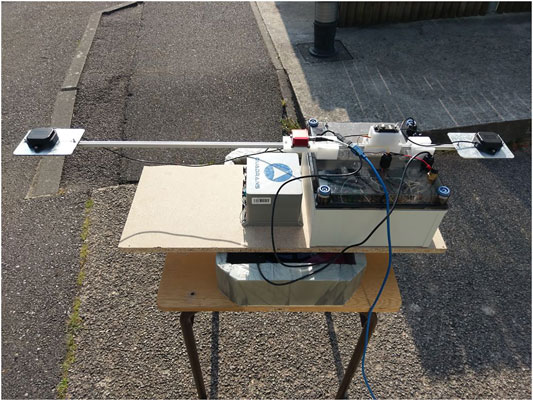
FIGURE 2. The iXBlue QUADRANS INS mounted together with the hardware of the interval-based INS. The QUADRANS was in the opposite direction of the rest and outputting data at 50 Hz, while the interval-based INS was operated at 20 Hz. Note that the QUADRANS did not have GPS, since it is not required for its operation and to be in conditions as different as possible from the rest of the system.
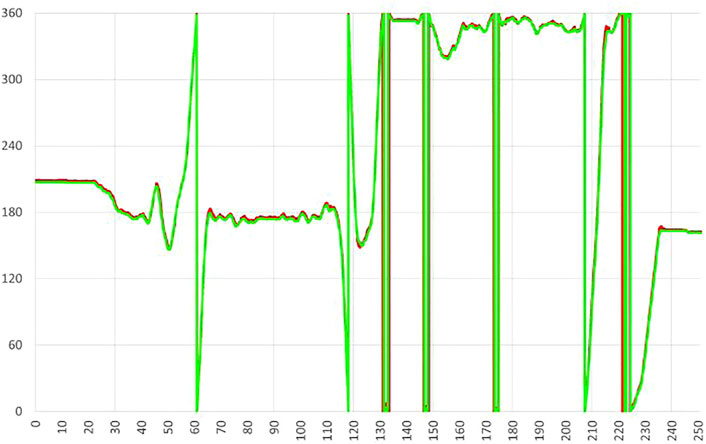
FIGURE 3. Evolution of the heading (in ° with respect to time in s) of the interval-based INS (in red) and the QUADRANS (in green). They visually coincide all the time except briefly sometimes due to the modulo 360° effect and fast movements (fast w.r.t. temporal resolution).
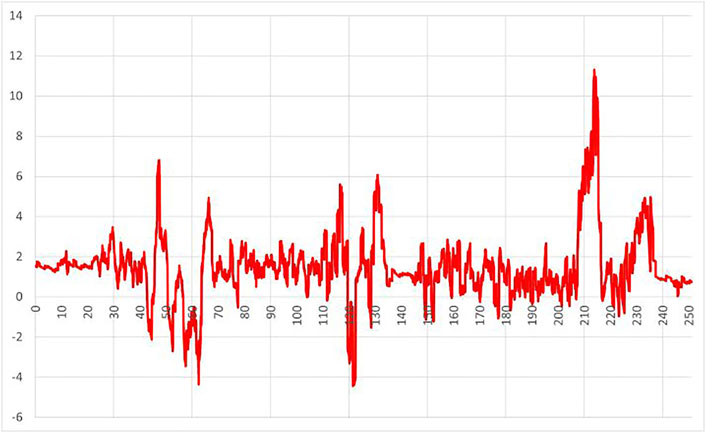
FIGURE 4. Evolution of the heading error (in ° with respect to time in s) between the interval-based INS and the QUADRANS.
The purpose of the second batch of experiments is to demonstrate that the interval-based INS could be competitive compared with existing solutions in some scenarios where faults or inconsistencies between sensors occur. Contrary to the preceding experiment, we are not interested in precision but rather in the behavior when handling obvious outliers. For that, two other systems were tested: an SBG Ellipse3-D-G4A2-B2 (with gyrometers full scale of 450°/s and accelerometers of 8 g) with SDK 6.2 and a Pixhawk 4 mini [firmware ArduRover V4.1.0-dev (12 645 674)] with simpleRTK2B+heading–Basic Starter Kit [firmware UBX_F9_100_HPG_113_ZED_F9P configured with instructions from ArduSimple (2021)]. Both systems are made of three magnetometers, three gyrometers, three accelerometers, and a dual GPS, and they are supposed to provide heading information from a fusion of all these sensors, similar to the interval-based INS of the boat. For all systems, default settings were used with magnetometers disabled (as long as the GPS is available) and dual antenna settings (approximately 1 m between the antennas, to fit the size of the boat). The antenna type is the same (antenna 1 at 46 cm behind the Ellipse-D, antenna 2 at 58.5 cm in front, set to “Rough lever arm” setting in sbgCenter), and initial date and lever arms are configured where applicable.
The test procedure has been the following:
• The INS is first left at a constant angle oriented toward the South (180°) during some time to ensure it is correctly initialized.
• Then it is turned by 90° toward West (270°) and left around for 30 s before returning to the initial position to check if the heading data are correct if the system is not static.
• To generate an inconsistency between the heading computed from the dual GPS antennas and the gyrometers, the IMU part of the system is rapidly moved to try to saturate the gyrometers and left at a constant angle oriented toward the West around 30 s, while the GPS antennas are not moved at all (therefore, they are still pointing toward the South).
• Finally, the IMU is put back in its original position to check how it recovers from the inconsistency. For the interval-based INS, other movements were made after the inconsistency to check that it was still responding correctly.
Figure 5 shows the results of the experiment for the Ellipse-D. The fused heading and the GPS heading coincide (except that the update rate of the GPS is 5 Hz, while the fused heading is determined at a frequency of 50 Hz) until the gyrometers are saturated. At this point, the fused heading outputs a wrong value of 200°, possibly evaluated from the gyrometer data; however, it does not correspond with the heading of the IMU, which should have been 270° or the heading of the GPS, which should have been 180° at this point of the experiment. After the IMU is put back in the same direction of the GPS, the fused heading indicates 100°, instead of 180°. It should be noted, however, that in other tests, where the gyrometer saturation was probably shorter, the Ellipse-D was sometimes able to recover from that disturbance. Also, although not tested, it might be possible to make it trust more the GPS instead of the gyrometers with other settings. Indeed, the commercial purpose of this type of INS is probably to be able to be more robust to GPS outliers due to, e.g., multipaths as well as increasing the heading output rate compared with a dual GPS without IMU aid. However, it should be possible to detect easily the gyrometer saturations and to choose in that case automatically to trust more the GPS data as long as they seem to be correct (e.g., distance between antennas still consistent with what was evaluated previously and with what was specified by the user as the initial value), as it was the case in this experiment.
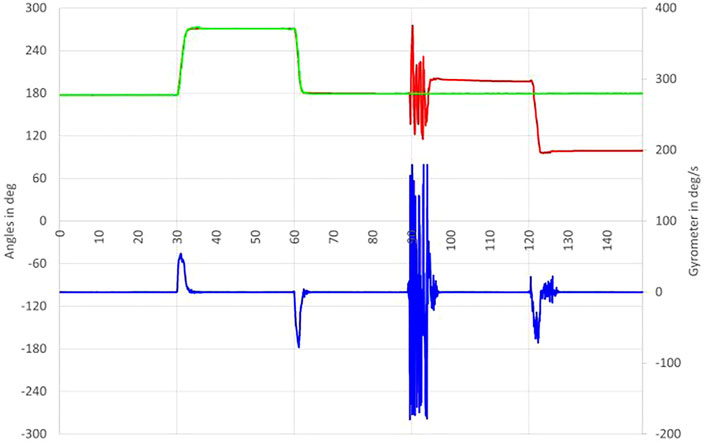
FIGURE 5. Evolution of the heading (in red) for the Ellipse-D (in ° with respect to time in s). The raw heading from the GPS is in green (in °), and the gyrometer data is in blue (in °/s).
Figure 6 shows the results of the experiment for the Pixhawk. The fused heading and the GPS heading coincide (except the update rate of the GPS is 5 Hz, while the fused heading is determined at a frequency of 50 Hz) until the gyrometers are saturated. At this point, the fused heading seems off but converges slowly toward the GPS value, until the IMU is moved back in the same direction of the GPS, when the gyrometers detect the rotation even though the fused heading seems again to converge finally toward the GPS value. This is probably due to a continuous weighted fusion between GPS and gyrometers data, which seems to be consistent with the fact that an EKF (Extended Kalman Filter) is known to be used internally (as this is an open-source design, this could be checked in more detail)9.
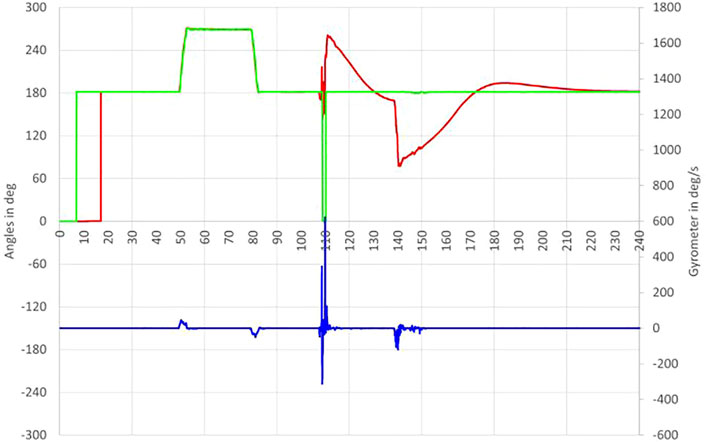
FIGURE 6. Evolution of the heading (in red) for the Pixhawk (in ° with respect to time in s). The raw heading from the GPS is in green (in °), and the gyrometer data is in blue (in °/s).
Figure 7 shows the results of the experiment for the interval-based INS. The fused heading and the GPS heading coincide (except that the update rate of the GPS is 1 Hz, while the fused heading is 20 Hz) except for a short time (1–2 s) when the gyrometers are saturated or when the IMU is moved back to its original position after the saturation. It could be interesting to check in further experiments whether a GPS rate of 5 Hz (like in the Ellipse-D) would give better results especially in the experiment with the QUADRANS, since it is not expected that it would significantly change the behavior in the experiment of Figure 7.
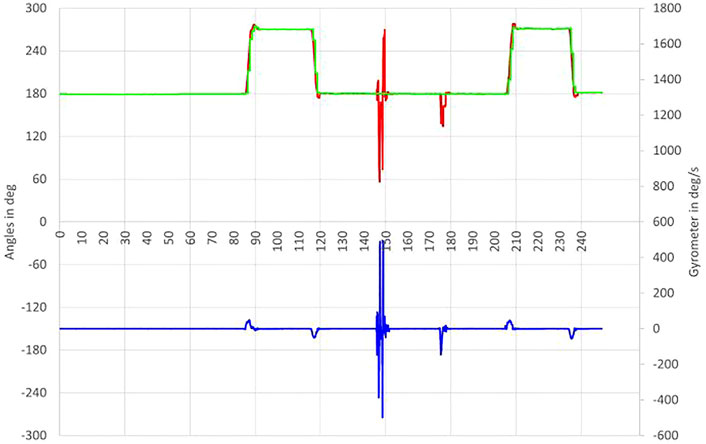
FIGURE 7. Evolution of the heading (in red) for the interval-based INS (in ° with respect to time in s). The raw heading from the GPS is in green (in °) and the gyrometer data is in blue (in °/s).
Although many improvements can already be foreseen, those results show that designing an interval-based INS naturally leads to consider which solution should be returned in case of inconsistencies in the data fusion process (i.e., empty intervals at some point in the computations). This can help to determine better when there are sensors that contradict each other and, whenever possible, which. Even if at the moment, it is not demonstrated that the designed interval-based INS would surpass other existing devices or methods, especially in terms of precision and accuracy, the foreseen theoretically increased reliability (with respect to inconsistencies, with a better propagation of all sensor and model errors, etc.) is alone worth to be reported, and this fact is already experimentally proven by the previously described experiments, which enable us to conclude that it appears to be better than COTS devices at least in some specific situations where inconsistencies could occur10.
2.6 Jet-Boat Simulator
The boat described in the Description of the autonomous boat section can be simulated using the following model:
where x and y are the boat coordinates, ψ its heading, vx and vy, the corresponding velocities in x and y directions, u1 is the motor input, and u2 is the jet direction input (see Figure 8). To significantly simplify the equations, the damping coefficient αf is assumed to be the same in all the directions with respect to the hull, L is the length of the boat, α is a coefficient such that αu1 is the propelling force, and β is such that δ = βu2 is the angle of the jet. The expression
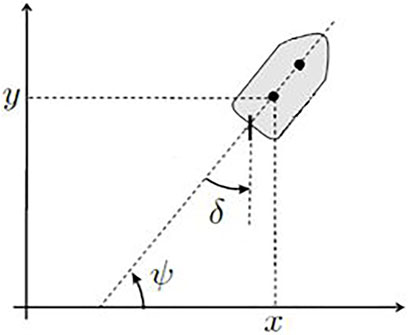
FIGURE 8. Description of the variables in the simulated boat model.
Figure 9 presents a simulated boustrophedon track (typical pattern followed by survey vessels, lawnmowers, etc.) with the same waypoints as the real experiment that is described in the Online control results in real experiments section. The coefficients in the model have been manually set so that the simulated track closely fits the real one. The control algorithm used is similar to the simple line following controller described in Jaulin and Le Bars (2012a) (only the rudder control is used in our case, the motor input was constant or manual). Additional tests when manually controlling the inputs show that the behavior of the simulated boat is similar to the real one.
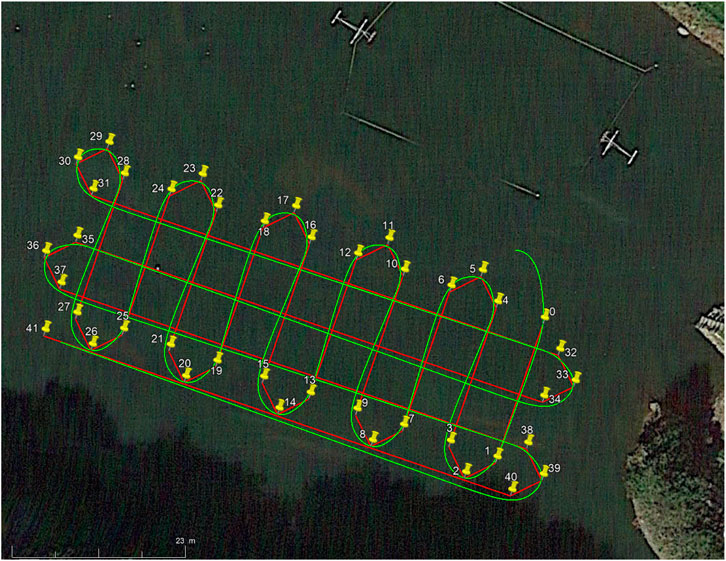
FIGURE 9. The simulated boustrophedon track (in green) with the desired waypoints (in yellow, connected by red lines). Short legs are approximately 20 m and long ones are 70 m.
3 Results
This section discusses the experiments made with the autonomous boat previously described, in different scenarios. All the data and the corresponding processing methods are available at http://www.ensta-bretagne.fr/lebars/spebot/ (see also footnote 7).
3.1 Online Control Results in Real Experiments
To demonstrate that the designed interval-based INS can be used in real missions of outdoor autonomous robots, the boat described in the Description of the autonomous boat section has been programmed to follow the boustrophedon track presented in the Jet-boat simulator section on a river. In the embedded controller, the heading computed by the interval-based INS is used to follow a target heading, which can be defined by the direction to follow to go toward a target waypoint [case of a simple waypoint following controller, see, e.g., Jaulin (2009)], or a weighted combination between this direction and the distance to the line between the previous waypoint and the target waypoint [case of a line following controller, see, e.g., Jaulin and Le Bars (2012a)]. Figure 10 shows that the trajectory is indeed compatible with what could be expected for this type of mission, with a maximum distance of around 2.5 m from the lines between the waypoints. Inaccurate heading estimations would make the robot often miss the target waypoint (and, in worst cases, go back to it and even turn around without managing to reach a desired minimum distance) in case of a waypoint-following controller, or oscillate near the line in case of a line-following controller (assuming the waypoints are reachable taking into account the robot dynamics).
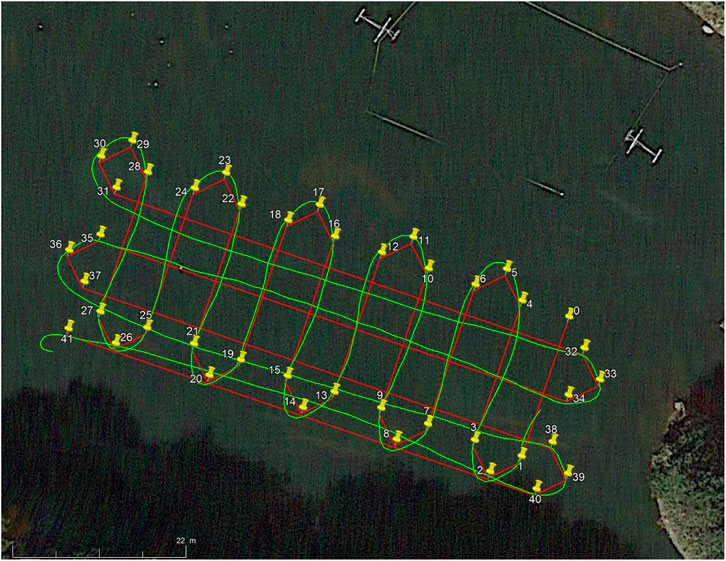
FIGURE 10. The real boustrophedon track (in green) with the desired waypoints (in yellow, connected by red lines). Short legs are approximately 20 m and long ones are 70 m.
3.2 Additional Tests and Offline Processing
3.2.1 Offline Processing to Fuse GPS Data with the Model
Since GPS only provides a new position estimate every second, the boat model used in the Jet-boat simulator section could be used to enhance the state estimation with an improved temporal resolution, e.g., by following the method in Le Bars et al. (2018) (and the problem is somehow similar to the fusion between gyrometer and GPS heading described in the Principle of operation section). In this context, we can describe our problem as:
where x(t) is the state vector of the boat, u(t) is its input vector, y(t) is its output vector, and:
• For some time instant t0, we have a box
• For all
• For multiple time instants
The evolution equation is given by Eq. (6), and the observation equation is:
because (x, y) can be measured regularly (i.e., not at all times) by the GPS, and ψ is measured by the INS at all times.
To solve this problem, we will use the contractor approach described previously:
• First, we need to use the observation equation to contract the known GPS positions of the robot.
• Then a propagation with respect to time on the differential equation [i.e., Eq. (6)] discretized using, for example, the explicit Euler method can be employed to get an evaluation of the trajectory between GPS positions.
• Repeating all the previous contraction operations until no more significant improvement on the trajectory estimation is achievable should propagate the contractions performed at selected points through the whole trajectory.
Remember also that any interval for which we do not have specific initial data first needs to be initialized as wide as possible to stay consistent with any further data, but
3.2.2 Dead Reckoning In Case Of GPS Loss Without Speed Sensor
The approach described in the previous section works also if we simulate the loss of the GPS position during a large portion of time (note that although the heading logs are here from the dual GPS, the system would have fell back to magnetometer in case of real GPS loss, which has no specific influence on the problem described in this section). During the loss of the GPS, the uncertainties will quickly increase over time (typical problem of dead reckoning), which translates to intervals (or boxes in 2D) with an increasing width, as explained in Le Bars et al. (2018). Figure 11 illustrates the trajectory estimation of the boat assuming the GPS was lost after 150 s, and details about the estimation of x and y are depicted in Figures 12 and 13 (see the Interval analysis section for more details about tubes). The figures have been generated in a computing time of around 30 s using the Codac library [see Rohou (2021)] and VIBes [see Drevelle and Nicola (2014)]. The GPS accuracy when it is in use is assumed to be 2.5 m, and its data are available every second. Additionally, a water current of
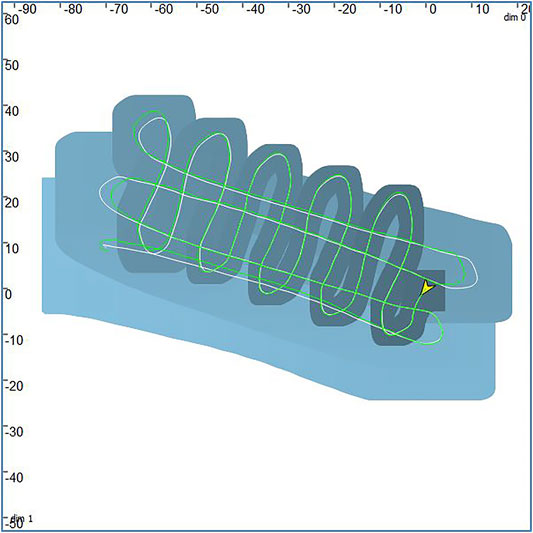
FIGURE 11. The trajectory estimation of the boat assuming the GPS cannot be used after 150 s (scale is in m). The GPS position data (considered as ground truth) are in green and the trajectory is displayed as a blue tube whose center is in white (the beginning corresponds to the darkest box).

FIGURE 12. The x position (in m) over time (in s) displayed as a tube in gray, GPS x position in green (in m), speed estimation (in m/s) tube in red, and error (in m) as the half-width of the tube (in black).
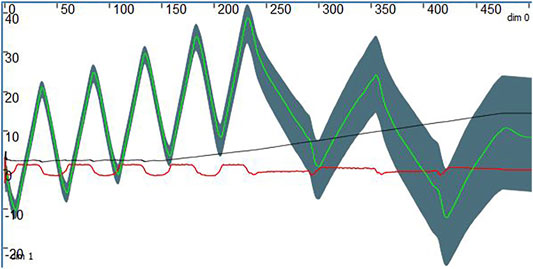
FIGURE 13. The y position (in m) over time (in s) displayed as a tube in gray, GPS y position in green (in m), speed estimation (in m/s) tube in red, and error (in m) as the half-width of the tube (in black).
3.2.3 Dead Reckoning in Case of GPS Loss with a Speed Sensor
As mentioned in the Description of the autonomous boat section, a DVL sensor has been installed on the boat for some experiments. Therefore, a state estimation method inspired from, e.g., Le Bars et al. (2010) can be used (as a comparison, for a Kalman-based method, see, e.g., Reitbauer and Schmied (2021). There, a similar problem is simulated for a ground robot. Odometers in combination with a Kalman filter are used to get the vehicle speed). Indeed, if
We can assume that:
• For some time instant t0, we have a box
• For all
A propagation with respect to time on the differential Eq. 12 discretized using the explicit Euler method can be used to get an evaluation of the trajectory. Figure 14 illustrates the trajectory estimation of the boat assuming the GPS was lost after 20 s, and details about x and y estimations are visualized in Figures 15 and 16. Contrary to the previous situation without DVL, the position uncertainty grows slower when the GPS is not available anymore. There are also moments where the model is close to be inconsistent with the GPS position in Figure 15, although it is not a problem due to the GPS uncertainties as explained before12.
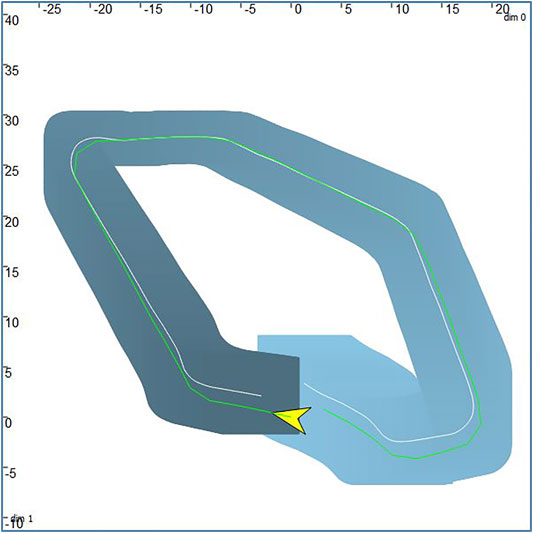
FIGURE 14. The trajectory estimation of the boat assuming the GPS cannot be used after 20 s, with DVL (scale is in m). The GPS position data (considered as ground truth) are in green, and the trajectory is displayed as a blue tube whose center is in white (the beginning corresponds to the darkest box).
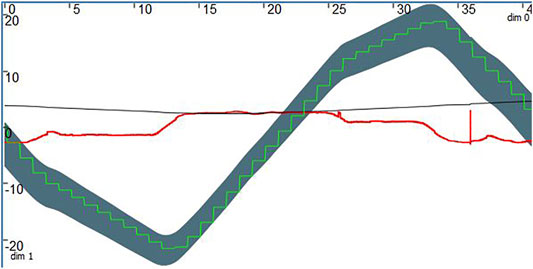
FIGURE 15. The x position (in m) over time (in s) displayed as a tube in gray, GPS x position in green (in m), speed estimation (in m/s) tube in red, and error (in m) as the half-width of the tube (in black).
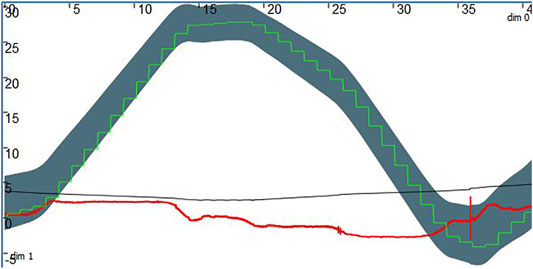
FIGURE 16. The y position (in m) over time (in s) displayed as a tube in gray, GPS y position in green (in m), speed estimation (in m/s) tube in red, and error (in m) as the half-width of the tube (in black).
Whatever the sensors or model used, these results demonstrate that interval methods can naturally provide a reliable estimation of the position error during the survey. The consistency with the GPS position considered as ground truth validates also that the interval-based INS used inside the boat outputs correct data. As long as the different hypotheses are true (e.g., assumptions on the precision of the discretized model, sensors data, etc.), the system can then theoretically provide a guaranteed explored, potentially explored, and surely not explored area as proposed in Desrochers and Jaulin (2016a) (here the position of the boat is in some way considered as the explored area, but in practice, the payload sensor characteristics should be used, and e.g., it would be the explored underwater area that would need to be guaranteed for the search of a target underwater).
Note that there were boat dynamic problems due to the DVL shape, the use of a smaller DVL such as Water Linked (2021), or improving its mechanical integration in the hull could easily limit the disturbances.
4 Conclusions and Outlook on Future Work
The reliable state estimation of an autonomous boat for river exploration has been presented in this paper. The main contribution is a first design of an interval-based INS, where the heading estimation is obtained from the fusion of dual GPS and gyrometer data in combination with a simple differential equation model, using interval analysis. Unit tests show that the precision and accuracy are compatible with the typically expected precision of the hardware, and in addition, some scenarios show a better resilience to outliers compared with alternative systems. The experiments made with an autonomous boat demonstrate the practical applicability of the approach.
Currently, it has to be noted that the described interval-based INS does not use interval analysis yet for roll and pitch, and the yaw used as fallback in case of GPS loss is not from the raw magnetometers from the SBG Ellipse-A underlying hardware, although no specific obstacle is foreseen for those improvements. Additionally, the system is not expected to be much robust to some GPS disturbances such as spoofing: Currently, it should fall back to the magnetometers in case the GPS is lost, or the estimated distance between the antennas is inconsistent, but sending misleading yet valid and consistent GPS data would make the system behave as if it was the other heading-related sensors that are failing, which should be also possible to take into account better in future work. Handling differential equation models
Data Availability Statement
The datasets presented in this study can be found in online repositories. The names of the repository/repositories and accession number(s) can be found below: http://www.ensta-bretagne.fr/lebars/spebot/.
Author Contributions
All authors listed have made a substantial, direct, and intellectual contribution to the work and approved it for publication.
Funding
This work was supported by the French Government Defense Procurement and Technology Agency (DGA).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1Unmanned Aerial/Surface/Ground/Underwater Vehicle, the letter U is often replaced by the letter A for Autonomous when the vehicle is unmanned and can be autonomous, which will be in the scope of this paper.
2For simplicity, GPS (Global Positioning System) and GNSS (Global Navigation Satellite System) notations will be used equally in the rest of the paper even though multiple constellations might be employed internally by the devices used.
3Basic factorization steps are usually not detailed although they might be necessary at implementation time to achieve a good precision performance.
4The implementation of this example in Python is available at http://replit.com/@lebarsfa/IntervalContractionProcedure.
5In practice, the time delay between the moment when the GPS heading was received and the moment for which this value has been measured needs to be estimated as precisely as possible, see Sanchez (2021) for more details and also Le Bars et al. (2012), Rohou et al. (2018) and Kletting et al. (2006) in case of time-varying uncertainties.
6An implementation of the polar contractor is available in the Codac library (see Rohou (2021)). Since it currently appears to be precise only for
7All experimental data are available at http://www.ensta-bretagne.fr/lebars/spebot/.
8With a potentially non-optimal time synchronization between data, and without specific effort to optimize the accuracy or precision, it has especially been noted during the experiment that the mounting of the antennas was not rigid enough.
9For an unknown reason (potentially a temporary bad connection or minor problem in the recording of the data), the heading from the GPS seems to drop punctually when the IMU part is moved rapidly, even though this does not seem to cause specific problems.
10It has to be noted that since many profiles or parameters are available in the systems used, the behavior might differ if settings other than the defaults were used.
11To simplify, we have assumed that the movement of the robot is only in 2D even though it can be easily extended to 3D. Any lever arms between sensors are assumed within the estimation errors. Note also it could be interesting to estimate the orientation bias between the DVL and the INS during moments where we have the GPS.
12It has to be noted that around t = 35 s in Figures 15 and 16, the speed has a punctual unexpected uncertainty. Although this has few consequences on the final results, it would remain to be investigated (it could be due to a nonoptimality of the cos or sin interval functions (which appear in R ⋅vr) in the underlying implementation since it seems to correspond to an angle of π).
References
[Dataset] ArduPilot (2021a). ArduPilot. Available at: http://www.ardupilot.org/.
[Dataset] ArduPilot (2021b). GPS for Yaw (Aka Moving Baseline). Available at: https://ardupilot.org/copter/docs/common-gps-for-yaw.html.
[Dataset] ArduSimple (2021). ZED-F9P Firmware Update with simpleRTK2B + Fw Version Check. Available at: https://www.ardusimple.com/zed-f9p-firmware-update-with-simplertk2b/.
Bonargent, T., Ménard, T., Pigeon, E., Pouliquen, M., and Gehan, O. (2020). “Observer Design for Nonlinear Systems with Multi-Rate Sampled Outputs - Application to Attitude Estimation,” in 2020 European Control Conference (ECC), Saint Petersburg, Russia, May 12–15, 2020, 997–1002. doi:10.23919/ECC51009.2020.9143923
Bourgois, A. (2021). “Safe & Collaborative Autonomous Underwater Docking: Interval Methods for Proving the Feasibility of an Underwater Docking Problem. PhD dissertation. France: Université de Bretagne Occidentale, ENSTA Bretagne.
[Dataset] Chabert, G. (2021). IBEX. Available at: http://www.ibex-lib.org/.
Chabert, G., and Jaulin, L. (2009). Contractor Programming. Artif. Intelligence 173, 1079–1100. doi:10.1016/j.artint.2009.03.002
Desrochers, B., and Jaulin, L. (2016b). A Minimal Contractor for the Polar Equation; Application to Robot Localization. Eng. Appl. Artif. Intelligence 55, 83–92. doi:10.1016/j.engappai.2016.06.005
Desrochers, B., and Jaulin, L. (2016a). Computing a Guaranteed Approximation of the Zone Explored by a Robot. IEEE Transaction on Automatic Control 62, 425–430. doi:10.1109/TAC.2016.2530719
Desrochers, B., Lacroix, S., and Jaulin, L. (2015). “Set-membership Approach to the Kidnapped Robot Problem,” in 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, September 28–October 02, 2015. doi:10.1109/iros.2015.7353897
[Dataset] Desrochers, B. (2021). pyIbex. Available at: https://pypi.org/project/pyibex/.
Drevelle, V., and Bonnifait, P. (2013). Reliable Positioning Domain Computation for Urban Navigation. IEEE Intell. Transport. Syst. Mag. 5, 21–29. doi:10.1109/mits.2013.2252058
Drevelle, V., and Nicola, J. (2014). VIBes: A Visualizer for Intervals and Boxes. Math.Comput.Sci. 8, 563–572. doi:10.1007/s11786-014-0202-0
[Dataset] Dronecode (2021). Dronecode. Available at: http://www.dronecode.org/.
Fischler, M. A., and Bolles, R. C. (1981). Random Sample Consensus. Commun. ACM 24, 381–395. doi:10.1145/358669.358692
Ifqir, S., Rauh, A., Kersten, J., Ichalal, D., Ait-Oufroukh, N., and Mammar, S. (2019). “Interval Observer-Based Controller Design for Systems with State Constraints: Application to Solid Oxide Fuel Cells Stacks,” in 2019 24th International Conference on Methods and Models in Automation and Robotics (MMAR), August 26–29, 2019, Miedzyzdroje, Poland, 372–377. doi:10.1109/MMAR.2019.8864718
[Dataset] iXBlue (2021). iXBlue. Available at: http://www.ixblue.com/.
Jaulin, L., Kieffer, M., Didrit, O., and Walter, E. (2001). Applied Interval Analysis, with Examples in Parameter and State Estimation, Robust Control and Robotics. London: Springer-Verlag.
Jaulin, L., and Le Bars, F. (2012a). “A Simple Controller for Line Following of Sailboats,” in 5th International Robotic Sailing Conference, Cardiff, United Kingdom, September 17–21, 2012 (Cardiff, UK: Springer), 107–119.
Jaulin, L., and Le Bars, F. (2012b). An Interval Approach for Stability Analysis; Application to Sailboat Robotics. IEEE Transaction on Robotics 29, 282–287. doi:10.1109/TRO.2012.2217794
Jaulin, L. (2015). Mobile Robotics. Available at: http://www.iste.co.uk/book.php?id=1538. 1st edition.
Jaulin, L. (2009). Robust Set-Membership State Estimation; Application to Underwater Robotics. Automatica 45, 202–206. doi:10.1016/j.automatica.2008.06.013
Kalman, R. E. (1960). A New Approach to Linear Filtering and Prediction Problems. Trans. AMSE, D, J. Basic Eng. 82, 35–45. doi:10.1115/1.3662552
Kletting, M., Rauh, A., Aschemann, H., and Hofer, E. (2006). “Interval Observer Design for Nonlinear Systems with Uncertain Time-Varying Parameters,” in 12th IEEE Intl. Conference on Methods and Models in Automation and Robotics MMAR 2006, Miedzyzdroje, Poland, August 28–31, 2006.
Le Bars, F., Antonio, E., Cervantes, J., De La Cruz, C., and Jaulin, L. (2018). “Estimating the Trajectory of Low-Cost Autonomous Robots Using Interval Analysis: Application to the euRathlon Competition,” in Marine Robotics and Applications. Editor L. Jaulin (Cham: Springer), 51–68. doi:10.1007/978-3-319-70724-2_4
Le Bars, F., Bertholom, A., Sliwka, J., and Jaulin, L. (2010). “Interval SLAM for Underwater Robots; a New experiment,” in NOLCOS 2010, Bologna, Italy, September 01–03, 2010. doi:10.3182/20100901-3-it-2016.00083
Le Bars, F., Sliwka, J., Jaulin, L., and Reynet, O. (2012). Set-Membership State Estimation with Fleeting Data. Automatica 48, 381–387. doi:10.1016/j.automatica.2011.11.004
Mahalanobis, P. C. (1936). On the Generalised Distance in Statistics. Proceedings of the National Institute of Sciences of India, 49–55. Available at: https://link.springer.com/article/10.1007/s13171-019-00164-5#citeas.
Mahony, R., Hamel, T., and Pflimlin, J.-M. (2008). Nonlinear Complementary Filters on the Special Orthogonal Group. IEEE Trans. Automat. Contr. 53, 1203–1218. doi:10.1109/TAC.2008.923738.16
Meier, L., Tanskanen, P., Fraundorfer, F., and Pollefeys, M. (2011). “PIXHAWK: A System for Autonomous Flight Using Onboard Computer Vision,” in 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, May 9–13, 2011, 2992–2997. doi:10.1109/ICRA.2011.5980229
Mourad-Chehade, F., Snoussi, H., Kieffer, M., and Richard, C. (2012). Robust Bounded-Error Tracking in Wireless Sensor Networks. SYSID 2012 (Bruxelles, Belgium) 45, 1097–1102. doi:10.3182/20120711-3-be-2027.00333
[Dataset] Paparazzi UAV (2021). Paparazzi UAV. Available at: http://wiki.paparazziuav.org/.
Paturel, Y., Lacambre, J.-B., Patin, F., and Moynagh, C. (2015). “Inertial Navigation at High Latitude: Trials and Test Results,” in OCEANS 2015 - MTS/IEEE Washington, October 19–22, 2015, Washington D.C, 1–5. doi:10.23919/OCEANS.2015.7401904
Promotion 2021, Robotique autonome (2021). Calibrating a Magnetometer Sensor Using Multiple Methods. Tech. rep., ENSTA Bretagne.
Rauh, A., and Auer, E. (2010). “Interval Approaches to Reliable Control of Dynamical Systems,” in Computer-assisted Proofs - Tools, Methods and Applications Dagstuhl Seminar Proceedings. Editors B. M. Brown, E. Kaltofen, S. Oishi, and S. M. Rump (Dagstuhl, Germany: Schloss Dagstuhl - Leibniz-Zentrum fuer Informatik, Germany), 09471.
Reitbauer, E., and Schmied, C. (2021). Bridging GNSS Outages with IMU and Odometry: A Case Study for Agricultural Vehicles. Sensors 21, 4467. doi:10.3390/s21134467
Reynet, O., Jaulin, L., and Chabert, G. (2009). “Robust TDOA Passive Location Using Interval Analysis and Contractor Programming,” in Radar 2009, Bordeaux, France, October 12–16, 2009.
[Dataset] Rohou, S. (2021). Codac. Available at: http://codac.io/.
Rohou, S., Jaulin, L., Mihaylova, L., Le Bars, F., and Veres, S. M. (2017). Guaranteed Computation of Robot Trajectories. Robotics Autonomous Syst. 93, 76–84. doi:10.1016/j.robot.2017.03.020
Rohou, S., Jaulin, L., Mihaylova, L., Le Bars, F., and Veres, S. M. (2018). Reliable Non-Linear State Estimation Involving Time Uncertainties. Automatica 93, 379–388. doi:10.1016/j.automatica.2018.03.074
Rohou, S., Jaulin, L., Mihaylova, L., Le Bars, F., and Veres, S. (2019). Reliable Robot Localization. ISTE Group. Available at: http://www.iste.co.uk/book.php?id=1553.
Sanchez, R. (2021). Fabrication et automatisation d’un drone de surface. Tech. rep., ENSTA Bretagne.
[Dataset] SBG Systems (2021). SBG Systems. Available at: http://www.sbg-systems.com/.
Voges, R., and Wagner, B. (2018). “Timestamp Offset Calibration for an Imu-Camera System under Interval Uncertainty,” in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October 1–5, 2018, 377–384. doi:10.1109/IROS.2018.8594237
[Dataset] Water Linked (2021). DVL A50. Available at: https://waterlinked.com/product/dvl-a50/.
Xiong, J., Jauberthie, C., Travé-Massuyès, L., and Le Gall, F. (2013). “Fault Detection Using Interval Kalman Filtering Enhanced by Constraint Propagation,” in 52nd IEEE Conference on Decision and Control, Florence, Italy, December 10–13, 2013, 490–495. doi:10.1109/CDC.2013.675992910.1109/cdc.2013.6759929
Keywords: state estimation, interval, robotics, attitude and heading reference systems, inertial navigation systems, robustness against outliers
Citation: Le Bars F, Sanchez R, Jaulin L, Rohou S and Rauh A (2022) An Online Interval-Based Inertial Navigation System for Control Purposes of Autonomous Boats. Front. Control. Eng. 2:786188. doi: 10.3389/fcteg.2021.786188
Received: 29 September 2021; Accepted: 20 December 2021;
Published: 04 March 2022.
Edited by:
Mudassir Rashid, Illinois Institute of Technology, United StatesReviewed by:
José Carlos Alves, University of Porto, PortugalSunan Huang, National University of Singapore, Singapore
Copyright © 2022 Le Bars, Sanchez , Jaulin , Rohou and Rauh . This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Fabrice Le Bars, ZmFicmljZS5sZV9iYXJzQGVuc3RhLWJyZXRhZ25lLm9yZw==
† Present address: Andreas Rauh, Department of Computing Science, Carl von Ossietzky Universität Oldenburg, Group: Distributed Control in Interconnected Systems, Oldenburg, Germany