 Sulong Li1
Sulong Li1 Qin Wang
Qin Wang Yangyang Chen
Yangyang Chen- 1Department of Information Engineering, Yangzhou University, Yangzhou, China
- 2Department of Automation, Southeast University, Nanjing, China
In this paper, the bearing-only formation control problem of a class of second-order system with unknown disturbance is investigated, where the control law merely depends on the relative bearings between neighboring agents. In order to offset the effect of unknown disturbance on the system, adaptive estimation is introduced. In the design of the control law, the back-stepping design method and the negative gradient method are used. The Barbalat’s lemma is used to prove the global stability of the system. The simulation results prove the effectiveness of the proposed formation control algorithm.
1 Introduction
In recent years, formation control of multi-agent systems has attracted great attention due to its wide application in military, scientific research, and daily life. The information commonly used in the existing formation control are categorized into position, relative distance and relative bearing. In particular, the research on formation control based on position or relative distance are very rich (Lin et al., 2016; Ran et al., 2017; Han et al., 2019; Mehdifar et al., 2019; Sun et al., 2019; Zou et al., 2019; Chen et al., 2020; Liu et al., 2020; Mehdifar et al., 2020; Yu and Chen, 2020). Relatively speaking, there is a lack of researches on formation control based on relative bearing. However, compared to the formation control approaches that rely on position or relative distance, bearing-only formation control has lower requirements for sensors, so it reduces the production cost and has a wide range of application scenarios. Therefore, the research on bearing-only formation control is of great significance.
Zhao and Zelazo (2016) have put forward the definition of bearing rigidity for any dimension and proved the conditions of bearing rigidity, which greatly promoted the development of formation control based on relative bearing. Based on the definition, researchers have done a lot of research. For different agent models such as single integrators, double integrators and unicycles, Zhao et al. (2019) designed a series of bearing-only control laws, which can enable followers to track leaders and reach the specified formation, and proved its stability by use of the standard Lyapunov method. Li et al. (2021) solved the bearing-only formation control problem of the three-dimensional nonholonomic constraints system by transforming the three-dimensional nonholonomic model into Euler-Lagrange-like form and using the back-stepping design method. Zhao et al. (2021) considered the system with local reference frame, they synchronized the orientations of followers with the leader first, and then adopted bearing-only control law to solve the formation control problem of double-integrators without global reference coordinates. Yang et al. (2020) designed a relative position estimator, which uses the relative bearing and the linear velocity information of the leader to estimate the relative position of the leader, and designed a controller with the estimated relative position information to complete the task of tracking the leader. Since collision is devastating to the formation control system, Hu and Yang (2020) proposed a distributed cooperative consensus control algorithm, and proved that this control method can prevent agents from colliding effectively. Besides, Luo et al. (2020) used the maximal clique graph instead of infinitesimal rigidity to express the communication topology between multi-agent with non-holonomic constraints, and designed a bearing-only formation control law to solve the problem of how to achieve global stability without leaders. Compared with these existing research on bearing-only formation control, most of existing research are focused on linear system, while the system studied in this paper is a nonlinear system with unknown time-varying disturbance. Disturbance is inevitable in reality, so it seems of more practical significance to study nonlinear system.
The main contribution of this paper is to propose a novel bearing-only formation control law that can handle second-order system with unknown disturbance. The control algorithm based on the negative gradient method only uses the information of relative bearings between neighboring agents. The adaptive estimation method is introduced to counteract the unknown disturbance, and the back-stepping design method is used in the design process. Then, the global stability of the bearing-only formation system is demonstrated by use of the Barbalat’s Lemma.
2 Problem Statement
Consider a formation system comprising of n agents, and the model of each agent is as follows:
In the formula above,
In this paper, we use an undirected graph
Define the edge vector and bearing vector, respectively:
As shown above,
In this paper, considering the control of formation without leader, the position information of multiple agents is
Therefore, the incidence matrix is defined as:
where
Assuming that the edge
At the same time, assign an expected vector to each edge vector
In this paper, we use the infinitesimally bearing rigidity to express the communication topology of multi-agent systems. It means that the shape of the formation can be uniquely determined. Zhao and Zelazo (2016) put forward the definition of infinitesimally bearing rigidity for any dimension and proved the conditions of infinitesimally bearing rigidity, which is shown in the following lemma.
Lemma 1: (Zhao and Zelazo, 2016): A framework G in
In order to design the globally stable formation control strategy, we give the following assumption and the potential function.
Assumption 1: The initial positions of agents do not coincide, and neighboring agents will not collide during formation.
The potential function between agent i and its neighboring agent j is defined as follows:
Define:
The definition of total potential function of agent i is
The problem of the bearing-only formation control to be solved in this paper is formally described as follows.
Problem 1: Consider multi-agent systems of n agents with unknown disturbance, its communication topology is defined by infinitesimal bearing rigidity. For any initial condition other than coincidence
3 Design of Global Stabilizer
Define
Also, let
Then, the control law is designed by use of the back-stepping design method.
Step 1:
Focus on the following subsystems of Eq. 7:
In this subsystem,
The Lyapunov function candidate is chosen as follows:
Owing to
The virtual control law
and it follows that
Step 2:
Then, introducing the error variable
Take the derivative of the above equation, that is
For the above system, the Lyapunov function candidate is chosen as follows:
where
Differentiate the function
Motivated by Wang et al. (2015), the global stabilized formation control law is designed as follows
Because of
The adaptive law is shown as:
Here
Remark 1:
Remark 2: The sign function in the control law would cause the chattering phenomenon. In simulation or engineering practice, the saturation function
4 Stability Analysis
The formation stability is analyzed as follows.
Theorem 1: Under the control law (Eq. 18), the multi-agent systems converges asymptotically to the desired shape and all agents move at the desired velocity
Proof: The Lyapunov function candidate
the above inequality is obtained when
Eq. 20 proves that
which means that
Since
In the same way
That is
In the following, put the above equation into matrix-vector form
Combining Eq. 2 and Eq. 21, we have:
We can get
So,
In summary, the system will converge to the following set:
That is, the relative bearings between agents reach the desired value, and all agents are moving at the same desired velocity; then the multi-agent systems achieve the desired formation shape.
5 Simulations
In the simulation, the dynamic model of agents is expressed by the following equation:
Then, we prove the effectiveness of the control law through 2D and 3D simulation examples.
5.1 Simulation for 2-Dimensional
In simulation, we choose
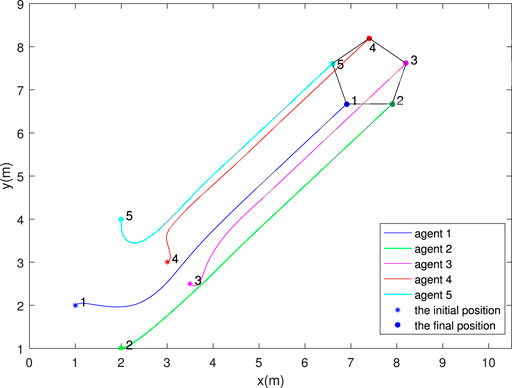
FIGURE 1. The trajectories of agents.
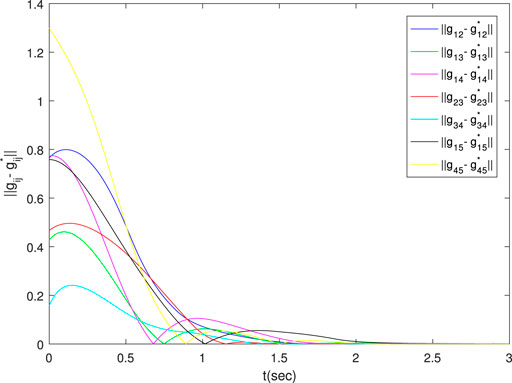
FIGURE 2. The bearing errors.
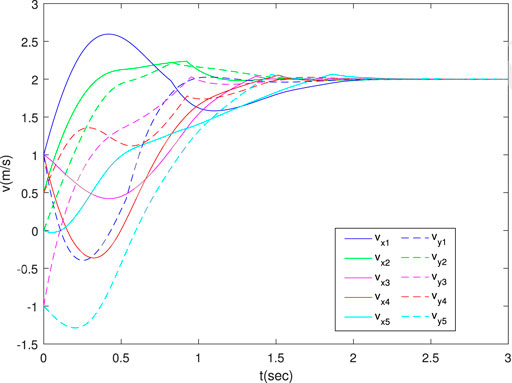
FIGURE 3. The velocities of agents.
As is shown in Figure 1, the formation converges to the desired regular pentagon. Figure 2 shows the bearing errors converge to zero. Figure 3 illustrates that the velocities of agents converge to desired one. The above results prove the effectiveness of the proposed control law in two dimensions.
Increasing the disturbance by a factor of three, and comparing the results of Figures 4–6 with Figures 1–3, it can be seen that the magnitude of the disturbance will affect the time required for the system to reach stability. The larger the disturbance, the longer it takes to reach stability.
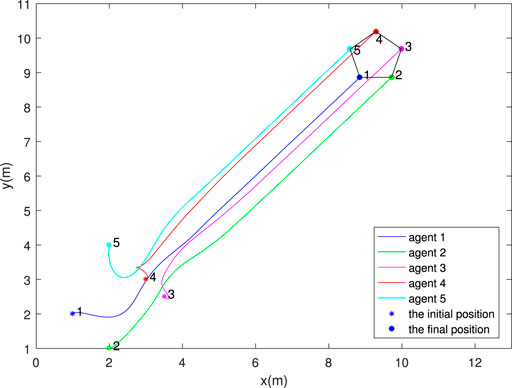
FIGURE 4. The trajectories of agents.
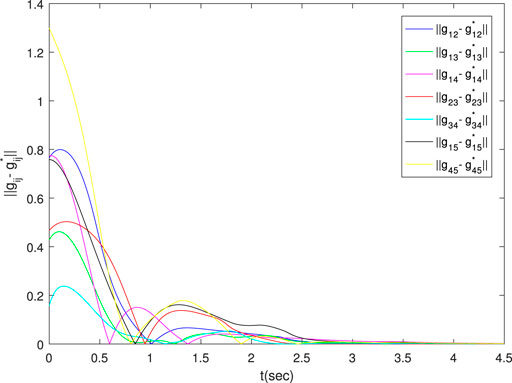
FIGURE 5. The bearing errors.
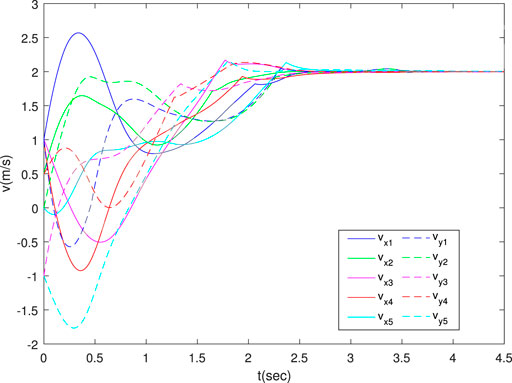
FIGURE 6. The velocities of agents.
5.2 Simulation for 3-Dimensional
In simulation, we choose
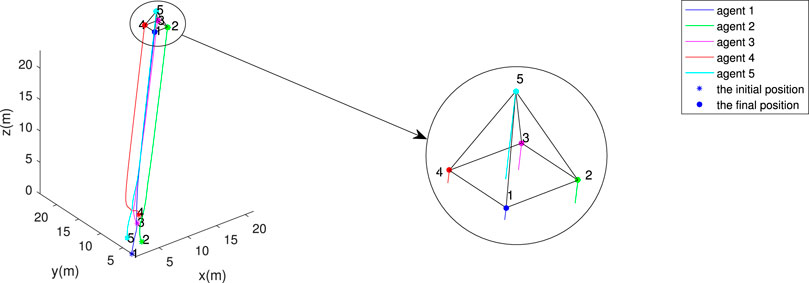
FIGURE 7. The trajectories of agents.
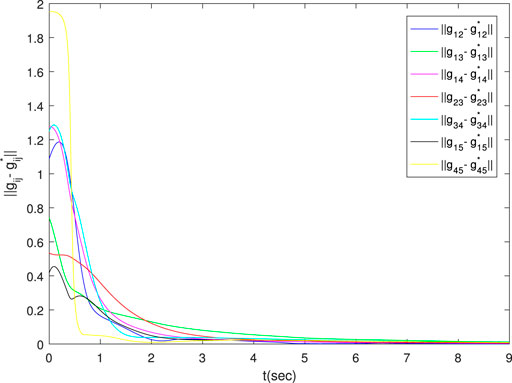
FIGURE 8. The bearing errors.
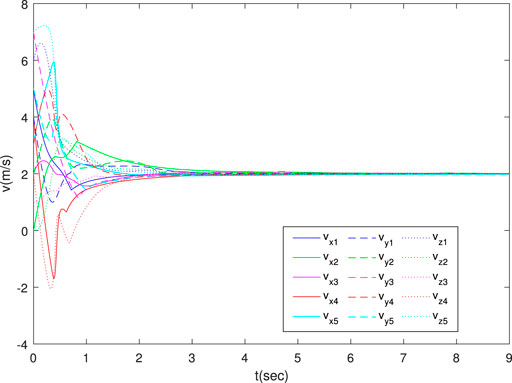
FIGURE 9. The velocities of agents.
As shown in Figure 7, the formation converges to the desired right square pyramid. Figure 8 shows the bearing errors converge to zero. Figure 9 illustrates that the velocities of agents converge to desired one. The above results prove the effectiveness of the proposed control law in three dimensions.
6 Conclusion
This paper proposes an adaptive formation control algorithm based on negative gradient method to solve the formation problem of a class of second-order system with uncertain disturbances, and the control law only uses the information of relative bearing between neighboring agents. The algorithm introduces adaptive estimation to counteract unknown disturbances. Furthermore, the back-stepping design method is used in the design process. Then, the global stability of the whole formation system is proved by Barbalat’s lemma. In the end, the simulation results in 2D and 3D show the effectiveness of the algorithm.
Data Availability Statement
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author Contributions
SL contributed to the design of control law, simulation and writing of the original draft. QW helped with the methodology, guidance, review and editing. EW and YC helped with review and editing. All authors contributed to the article and approved the submitted version.
Funding
This work was supported in part by the National Natural Science Foundation of China under Grants 61803331, 61873229, 61806175, and 61873346, in part by the Jiangsu Planned Projects for Postdoctoral Research Funds 1601024B.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
Biggs, N. (1974). Algebraic Graph Theory. Cambridge: Cambridge University Press. doi:10.1017/cbo9780511608704
Chen, L., Mei, J., Li, C., and Ma, G. (2020). Distributed Leader-Follower Affine Formation Maneuver Control for High-Order Multiagent Systems. IEEE Trans. Automat. Contr. 65, 4941–4948. doi:10.1109/tac.2020.2986684
Clarke, F. H. (1990). Optimization and Nonsmooth Analysis. New York: John Wiley & Sons. doi:10.1137/1.9781611971309
Ge, S. S., Hang, C. C., Lee, T. H., and Zhang, T. (2002). Stable Adaptive Neural Network Control. New York: Springer US. doi:10.1007/978-1-4757-6577-9
Han, Z., Guo, K., Xie, L., and Lin, Z. (2019). Integrated Relative Localization and Leader-Follower Formation Control. IEEE Trans. Automat. Contr. 64, 20–34. doi:10.1109/TAC.2018.2800790
Hu, Z., and Yang, J. (2020). Collision Avoidance Cooperative Attack with Multiple Pursuers Based on Bearing-Only Measurements. J. Franklin Inst. 357, 437–456. doi:10.1016/j.jfranklin.2019.11.061
Li, X., Wen, C., and Chen, C. (2021). Adaptive Formation Control of Networked Robotic Systems with Bearing-Only Measurements. IEEE Trans. Cybern. 51, 199–209. doi:10.1109/TCYB.2020.2978981
Lin, Z., Wang, L., Han, Z., and Fu, M. (2016). A Graph Laplacian Approach to Coordinate-free Formation Stabilization for Directed Networks. IEEE Trans. Automat. Contr. 61, 1269–1280. doi:10.1109/TAC.2015.2454711
Liu, Y., Huang, P., Zhang, F., and Zhao, Y. (2020). Distributed Formation Control Using Artificial Potentials and Neural Network for Constrained Multiagent Systems. IEEE Trans. Contr. Syst. Technol. 28, 697–704. doi:10.1109/TCST.2018.2884226
Luo, X., Li, X., Li, X., Yan, J., and Guan, X. (2020). Globally Stable Formation Control of Nonholonomic Multiagent Systems with Bearing-Only Measurement. IEEE Syst. J. 14, 2901–2912. doi:10.1109/JSYST.2019.2935162
Mehdifar, F., Bechlioulis, C. P., Hashemzadeh, F., and Baradarannia, M. (2020). Prescribed Performance Distance-Based Formation Control of Multi-Agent Systems. Automatica 119, 109086. doi:10.1016/j.automatica.2020.109086
Mehdifar, F., Hashemzadeh, F., Baradarannia, M., and de Queiroz, M. (2019). Finite-time Rigidity-Based Formation Maneuvering of Multiagent Systems Using Distributed Finite-Time Velocity Estimators. IEEE Trans. Cybern. 49, 4473–4484. doi:10.1109/TCYB.2018.2876608
Ran, D., Chen, X., Misra, A. K., and Xiao, B. (2017). Relative Position Coordinated Control for Spacecraft Formation Flying with Communication Delays. Acta Astronautica 137, 302–311. doi:10.1016/j.actaastro.2017.04.011
Shevitz, D., and Paden, B. (1993). “Lyapunov Stability Theory of Nonsmooth Systems,” in Proceedings of 32nd IEEE Conference on Decision and Control, San Antonio, TX, December 15, 1993 (Piscataway, NJ: IEEE), 416–421. doi:10.1109/CDC.1993.325114
Sun, Z., de Marina, H. G., Seyboth, G. S., Anderson, B. D. O., and Yu, C. (2019). Circular Formation Control of Multiple Unicycle-type Agents with Nonidentical Constant Speeds. IEEE Trans. Contr. Syst. Technol. 27, 192–205. doi:10.1109/TCST.2017.2763938
Wang, Q., Zhu, Y., Li, J., and Hua, Q. (2015). “Globally Stable Rigid Formation Control for Multi-Robot Systems,” in 2015 34th Chinese Control Conference (CCC), Hangzhou, China, July 28–30, 2015 (Piscataway, NJ: IEEE), 7505–7510. doi:10.1109/ChiCC.2015.7260829
Yang, Z., Zhu, S., Chen, C., Feng, G., and Guan, X. (2020). Leader-follower Formation Control of Nonholonomic mobile Robots with Bearing-Only Measurements. J. Franklin Inst. 357, 1628–1643. doi:10.1016/j.jfranklin.2019.11.025
Yu, D., and Chen, C. L. P. (2020). Automatic Leader-Follower Persistent Formation Generation with Minimum Agent-Movement in Various Switching Topologies. IEEE Trans. Cybern. 50, 1569–1581. doi:10.1109/TCYB.2018.2865803
Zhao, J., Yu, X., Li, X., and Wang, H. (2021). Bearing-only Formation Tracking Control of Multi-Agent Systems with Local Reference Frames and Constant-Velocity Leaders. IEEE Control. Syst. Lett. 5, 1–6. doi:10.1109/LCSYS.2020.2999972
Zhao, S., Li, Z., and Ding, Z. (2019). Bearing-only Formation Tracking Control of Multiagent Systems. IEEE Trans. Automat. Contr. 64, 4541–4554. doi:10.1109/TAC.2019.2903290
Zhao, S., and Zelazo, D. (2016). Bearing Rigidity and Almost Global Bearing-Only Formation Stabilization. IEEE Trans. Automat. Contr. 61, 1255–1268. doi:10.1109/TAC.2015.2459191
Keywords: formation control, relative bearing, back-stepping design method, negative gradient method, global stability
Citation: Li S, Wang Q, Wang E and Chen Y (2021) Bearing-Only Adaptive Formation Control Using Back-Stepping Method. Front. Control. Eng. 2:700053. doi: 10.3389/fcteg.2021.700053
Received: 25 April 2021; Accepted: 11 June 2021;
Published: 15 July 2021.
Edited by:
Chunyan Wang, Beijing Institute of Technology, ChinaReviewed by:
Qing Wang, Beihang University, ChinaYang Xu, Northwestern Polytechnical University, China
Dandan Wang, Beijing Institute of Technology, China
Copyright © 2021 Li, Wang, Wang and Chen. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Qin Wang, cWlud2FuZ0B5enUuZWR1LmNu