
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Commun. Netw., 07 May 2021
Sec. Aerial and Space Networks
Volume 2 - 2021 | https://doi.org/10.3389/frcmn.2021.643095
 Shkelzen Cakaj1,2*
Shkelzen Cakaj1,2*Communications-integrated satellite-terrestrial networks used for global broadband services have gained a high degree of interest from scientists and industries worldwide. The most convenient structures for such use are low Earth orbit satellites, since they fly closer to the Earth compared to the other orbits, and consequently provide significantly lower latency, which is essential for reliable and safe communications. Among these efforts is the Starlink satellites constellation, developed and partly deployed by the United States Company SpaceX. The constellation is planned to be organized in three spatial shells, each of them made up of several hundreds of small-dimensioned and light-weighted low Earth orbit specially designed satellites to provide broadband services, intending to offer global Earth coverage through their interoperability, combined also with the ground stations as a part of the satellite-terrestrial integrated network. By October 24, 2020, 893 satellites are situated in orbit of altitudes of 550 km under different inclinations, determining the first Starlink orbital shell. Two next generations are planned to be situated at altitudes of 1,110 and 340 km, to complete the appropriate infrastructure of three Starlink satellite shells, toward a global presence of broadband internet services. These three orbital shells offer different space views seen from the ground station (user) because of their different altitudes, thus in this paper a few parameters which describe the satellite’s behavior considered from the ground station’s (user’s) point of view are compared. These parameters in fact stem from the space orbital parameters and are defined as: horizon plane wideness, slant range, latency, and coverage area. A comparison is given for the three Starlink orbit layers, with identification of appropriate drawbacks and advantages as performance indicators. By the end, these parameters are applied to geometrically interpret and confirm the handover process among satellites. This paper may serve to highlight the new challenges of the satellite-terrestrial integrated network, providing some theoretical analysis and performance comparisons for the satellites in different orbit layers seen from the ground station (user) perspective.
The orbits of altitudes ranging from 300 km up to around 1,400 km above the Earth’s surface are defined as Low Earth Orbits, and the satellites consolidated to these orbits are known as the LEO satellites. The lower altitude range is limited by the Earth’s atmosphere, more accurately by the level above the Earth’s atmosphere where there is almost no air, so the satellite’s speed reduction and drag down is avoided. The higher altitude range is limited by the inner Van Allen belt (Van Allen radiation belt, 2020). The Van Allen belt is known as a space radiation zone and has undesired effects on satellites’ payload and platform (electronic components and solar cells can be damaged by this radiation), thus the belt should not be used for the accommodation of satellites.
The position of the satellite in space (space slot) is determined by space orbital parameters, known as Kepler’s elements. One of them is the orbital radius (for circular orbits) as a main component related to the distance between the satellite and the ground station. The ground station is the location on the ground equipped with appropriate equipment to be used for communication with the satellite. The communication between the satellite and the ground station is enabled only when the satellite is stabilized in its own space slot and is visible from the ground station (user) (Richharia, 1999; Cakaj and Malaric, 2007).
In addition to communications, LEO satellites are also applied for scientific and research purposes, more specifically under circumstances where no on ground means are appropriate. Dynamics on climate changes, remote sensing applications for oceans, different astronomic observations, ion density records in the ionosphere, and very specific humanitarian applications related to search and rescue services are some of activities carried out by LEO satellites, activities which are too difficult or impossible to be implemented on Earth. For these activities within satellite structures, the instruments or devices for the appropriate application or mission are installed (Zee and Stibrany, 2002; Cakaj et al., 2010a). Usually, LEO satellites dedicated for scientific purposes or remote sensing applications are accommodated in specifically designed orbits, known as Sun synchronized. The Sun synchronization feature enables a treated area on the ground from the satellite to be observed under similar illumination conditions due to different satellite passes (Cakaj et al., 2005; Cakaj et al., 2009).
LEO satellites used at the end of the past century were known as microsatellites because of their lightweight and small dimensions. Later, nanosatellites were developed as more convenient structure for launching process, since less energy is required to launch such satellites into the LEO space slot. But recently, it has been possible to launch nanosatellites from the Internation Space Station (ISS) (List of spacecraft deployed from the International Space Station, 2020). Related to the launching process, low Earth orbits play an additional role as the first space shell for the satellites toward geosynchronous (geostationary) orbits, due to the three step transfer process (known as Hohmann transfer) (Cakaj et al., 2015).
The shortest distance from the Earth compared with other orbits and consequently the lowest latency provided make LEO satellites very convenient equipment for integrated satellite-terrestrial communications networking. LEO satellites move at around 7.5 km/s velocity relative to a fixed point on the Earth (ground station). Satellites’ orbital period is in the range of 90–110 min. The communication duration between the satellite and the ground station takes 5–15 min over 6–8 times during the day (Cakaj and Malaric, 2007). For illustration, the Hubble Space Telescope operates at an altitude of about 610 km with an orbital period of 97 min (Oberright, 2004).
This would suggest that in the near future, worldwide broadband services provided by integrated satellite-terrestrial communication networks will be a part of daily life communication activities, demands for which will rapidly increase, so operators should carefully manage operation and distribution of real-time services towards maximizing the downlink data throughput related to the broadband requirements without significantly affecting the mission cost (Botta and Pescape, 2013; Garner, et al., 2009). Therefore, future satellite payloads and platforms have to become more flexible, lightweight and smaller, easier to be launched, and reconfigurable related to the EIRP and coverage, to provide large capacity at the lowest cost, towards the main goal of worldwide coverage with broadband services. Among these projects, achieving worldwide broadband coverage using the small and lightweight LEO satellites with agile payload architecture is a key aim of the Starlink LEO satellites.
Satellite networks, according to their architecture in space, are categorized into single layer (one shell) networks and multilayer networks. A single layer network provides intercommunication between only satellites of the same altitude, whereas multilayer networks enable communications between satellites in different shells. Multilayer networking is more complex but is advocated for its flexibility in providing more sustainable global coverage, seamless handovers, and reliable communications. Starlink’s LEO satellites system is organized as a multilayer three shells network.
The main contribution of this paper lies in designing a framework that emphasizes the mathematical-geometrical correlation between the ideal and designed horizon plane for LEO satellite-based communications. The relation between the ideal and designed horizon plane wideness is determined and analyzed for optimal values. They are further applied to interpret and confirm the handover process with a LEO constellation, from the user’s location perspective.
This ambitious project is the subject of this paper, starting with a brief presentation of the Starlink LEO satellites constellation, mainly related to the satellites’ location in space respectively to their current and future shell organization. Of the next section compares elementary parameters of velocity, period, and number of daily passes. Then, a further comparison is made of the slant range and more specifically for the ideal and designed horizon plane parameters seen from the user’s view. Lastly, coverage aspects for each shell are considered. By the end, the extracted results are applied for geometrical interpretation and confirmation of the handover process between adjacent satellites. This paper closes with tabulated comparison parameters for three orbital shells, according to its title.
Technological efforts toward an integrated satellite-terrestrial network began at the end of the last century, especially with the application of LEO microsatellites and nanosatellites. Some active satellite projects related to an integrated satellite-terrestrial communications network include the Iridium constellation with 66 satellites (Cochetti, 2015), the OneWeb constellation with 648 satellites (De Selding, 2015; Pultarova and Henry, 2017) Amazon, which has filed to launch 3,236 spacecraft in its Kuiper constellation (Sheetz, 2019), and Telesat with the initiative of having 117 spacecrafts constellation (Foust, 2018), but the most serious activities lately are taken by SpaceX company, which will be further elaborated.
The Starlink constellation is planned to consist of thousands of small LEO satellites, deployed in three shells (layers), dedicated to maximize broadband internet services toward global Earth coverage, and combined with ground stations (trans-receivers), to be organized as a satellite-terrestrial integrated network.
By October 24, 2020, SpaceX confirmed 893 satellites were accommodated in space in low orbits. In total, nearly 12,000 satellites are planned to be deployed and organized in three orbital shells, as follows (Starlink, 2020; Starlink Satellite Missions, 2020).
• The first shell: 1,440 in a 550 km altitude shell.
• The second shell: 2,825 in a 1,110 km altitude shell.
• The third shell: 7,500 in 340 km altitude shell.
The first shell of 1,440 satellites will be made up of 72 orbital planes of 20 satellites each, with the intention to complete the others by 2024 to provide real-time broadband services (Starlink, 2020; Starlink Satellite Missions, 2020).
For the LEO satellites constellation as a part of the satellite-terrestrial network dedicated for global broadband services, from the ground observation, two types of stations on ground should be implemented. The first one is the user’s station (user access point) with the appropriate dish and the trans-receiver to serve for lock/unlock of communication with the satellites. Initially, users will communicate with satellites under users’ elevation angle of 40°, but this could be changed. Starlink has submitted the request to FCC (Federal Communications Commission) for the lower users’ elevation angle of 25° rather than the 40°, in order to improve the reception (Starlink, 2020), (Starlink Satellite Missions, 2020).
Other ground stations are related to the operation, control, and maintenance of the satellites. SpaceX has made applications to the FCC for at least 32 ground stations in the United States, and as of July 30, 2020 has approval for six of them (in six states). For such dedication the satellites communicate with three testing ground stations, for short-term experiments of less than 10 min duration, a few times daily (Starlink, 2020). The ground stations dedicated for control and operation usually communicate with satellites at 10° of elevation [exmp. NOAA (National Oceanic and Administration) ground stations for search and rescue services] (Cakaj, 2010). The concerns of this paper are only the users’ stations.
By April 1, 2020, the Union of Concerned Scientists (UCS), which maintains a database of active satellites in orbits, declared a total of 2,666 satellites in Space, with 1,918 in low Earth orbits (LEO) (Geospatial World, 2021). By activities taken by SpaceX and other companies, in the near future, the satellites will envelop the Earth, which will necessarily impact and transform the sky.
Concerning the communications perspective, from my view, the step taken forward to envelop the Earth with satellites for ubiquitous broadband services represents a very gigantic technological step for worldwide human equality, but with a lot of challenges to be faced in the future. This is going to simplify communications for worldwide purposes from any point on the Earth. Let me close this part with two illustrative examples.
On November 17, 2020, Reddit published a picture titled as: “Dish with clear view of the sky and friendly elk” (Reddit, 2020), given as Figure 1. The satellite dish and the elk are pictured close to each other but not disturbing each other. On November 2018, Xin Yang submitted his PhD thesis titled “Low Earth Orbit (LEO) Mega Constellations-Satellite and Terrestrial Integrated Communication Networks” at the University of Surrey. Under chapter Literature review, page 41, he has a picture captioned as, “Starlink constellation (11,943 Satellites, Imaginary Representation, and Created with SaVi [55])” representing the enveloped Earth by Starlink satellites (Yang, 2018), which is given as Figure 2 (Yang, 2018; Lutz et al., 2012). The first picture speaks about the simplicity and the second one about the complexity. In between these two pictures, in between simplicity and complexity, there is much room for future scientific challenges, not only in the area of the integrated satellite-terrestrial networks for ubiquitous broadband services but also the sky transformation which will be of deep concern. Further elaboration will contribute towards facing these challenges.

FIGURE 1. Dish with clear view of the sky and friendly elk (Reddit, 2020).
FIGURE 2. Starlink constellation (11,943 satellites, imaginary representation, created with SaVi [55]) (Yang, 2018; Lutz et al., 2012).
Ground stations (users on ground) are part of any satellite network dedicated to lock/unlock communication with satellites. Ground stations can be locked for communication with LEO satellites only when the satellite is in their visibility region. The duration of the visibility determines the communication duration (Cakaj, 2009; Cakaj et al., 2011). The performance in respect to the horizon plane, slant range, and the appropriate latency for communication in between user’s station and the Starlink satellites for different satellite orbital shells will be analyzed (layers).
As the first step, for the three shells velocity, the period, and the number of daily passes given are calculated in Table 1. Each circular orbit is characterized by its altitude H, respectively with its radius r interrelated as:
where
where r is the orbital radius and
and the number of the daily passes (n) is the ratio of sideral day (T = 23 h 56 min 4.1 s) over the orbital period.
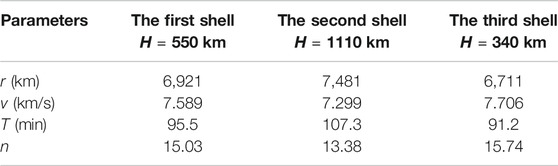
TABLE 1. Radius, velocity, orbital period, and number of daily passes.
The satellite’s orbital plane in space is determined by the orbital parameters, which under ideal circumstances remains fixed related to the Earth’s body. Since LEOs fly too low, consequently having short flyover period, they make several daily passes over the Earth under the same orbital parameters.
As LEO flies in its own orbit over the Earth, the Earth rotates around its N-S axis under the satellite’s orbit also. Because of the Earth’s rotation, the ground station on the Earth’s surface changes its position relative to the spatial orbital plane, so the pointing from the ground station (user) to the satellite is not identical for the different satellite daily passes of the same orbit.
Thus, the view of the satellite from the ground station (user) differs for each daily pass (n at Table1). Different satellite’s views by the user (ground station) means different visibility duration between the user and the satellite, and consequently different communication durations. This is typical for LEO satellites. In conclusion, from the single ground station (user location point), the satellite in its orbit is seen differently under different satellite passes of the same orbit, consequently each LEO pass provides different communication durations with the appropriate point on the ground (user) (Cakaj and Malaric, 2007). This applies for any ground station (user) on the Earth’s surface.
The geometrical description providing the space view between a satellite and the ground station is given in Figure 3 (Cakaj, 2009; Cakaj et al., 2011). The horizon plane is considered as a tangent plane (perpendicular) at the user’s (ground station) vector with the Earth’s center
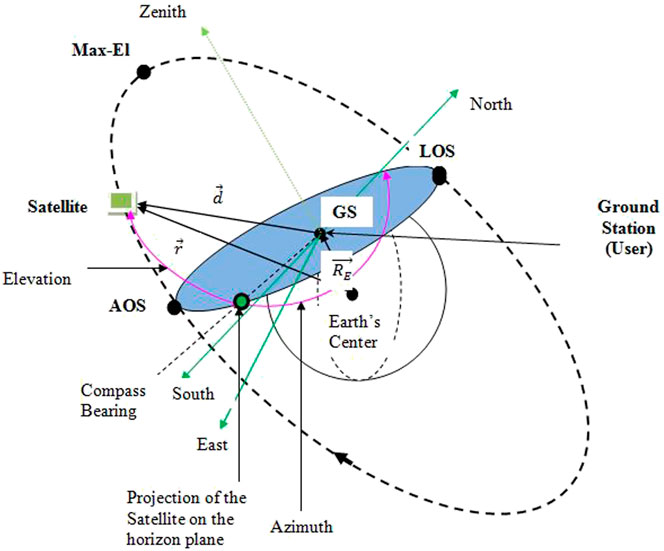
FIGURE 3. Horizon plan and slant range.
Figure 3 shows that the communication between the LEO satellite and the user is locked when the satellite appears just at the user’s horizon plane, and the communication is unlocked when the satellite disappears from the user’s horizon plane.
The satellite pass over the ground station is characterized by three typical events, which happen in the following order. First, when the satellite appears just at the horizon plane defined as the Acquisition of the Satellite (AOS) event, this establishes the communication with the user station. Theoretically this happens at an elevation of 0°. The second event is when the satellite achieves the Maximal Elevation (Max-El) of the appropriate satellite pass over the user’s station. The third event happens when the satellite disappears from the horizon plane, known as the Loss of the Satellite (LOS) event, happening theoretically at an elevation of 0° also. These events in Figure 3 are denoted as AOS, Max-El, and LOS.
Each satellite pass over the user station is characterized by its Maximal Elevation (Max-El), seen from the user’s station (Max-El event). For the satellite pass from the event AOS to the event Max-EL, the elevation increases (up to Max-El), and from the event Max-El to the event LOS, the elevation symmetrically decreases. Obviously, the higher the angle at the event of Max-El, the longer the satellite path, and the inverse is also true, with the lower the angle of Max-El, the shorter the satellite path. The shorter satellite path (lower Max-El) enables shorter communication with the ground station (user) and the longer satellite path (higher Max-El) enables longer communication. In conclusion, the communication duration between the satellite and the user depends on the Maximal Elevation (Max-El) from the user’s site from which the satellite is seen.
The virtual line connecting the satellite and the ground station in Figure 3 represents the actual distance between the satellite and the ground station (user), known as the slant range vector
The events AOS (Acquisition of the Satellite) and LOS (Loss of the Satellite), at elevation of 0°, geographically determine the ideal horizon plane. The first event identifies the case when the satellite appears just at the horizon plane to be locked and communicate with the ground station (user) and the second one the case when the satellite just disappears from the horizon plane, being unlocked and disabling communication with the ground station (user). The virtual line connecting points in space when AOS and LOS happen at an elevation of 0° determine the ideal horizon plane wideness (IHPW) presented in Figure 4. The wideness of the horizon plane depends on the satellite’s orbital altitude (Cakaj et al., 2011).
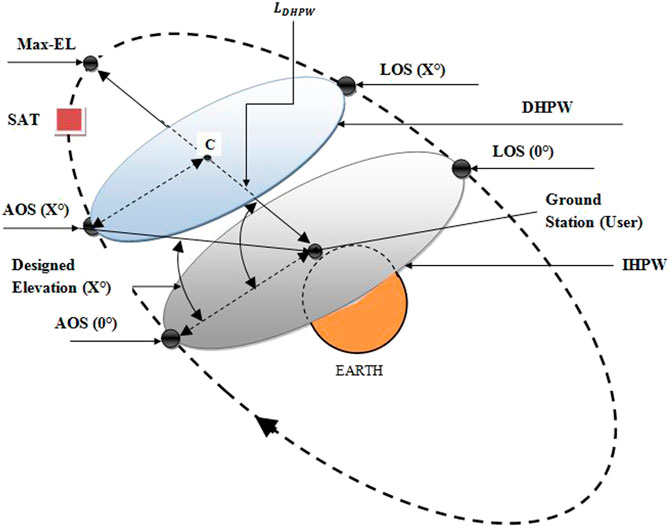
FIGURE 4. Ideal and designed horizon plane.
The ideal horizon plane in fact represents the visibility region under 0° of elevation angle. But, usually because of different barriers (natural or artificial), this visibility region could be hidden, and consequently no communication could be locked/unlocked in between the satellite and the user. In order to avoid the problem of such obstacles, in that the visibility region could possibly be hidden, the designers predetermine the lowest elevation of the horizon plane for safe communication to be locked/unlocked.
The horizon plane with appropriate designed elevation (X°) is considered the designed horizon plane, with its designed horizon plane wideness (DHPW). Normally, the designed horizon plane wideness is always shorter than the ideal horizon plane wideness (Cakaj et al., 2011). IHPW and DHPW are given in Figure 4. For communication purposes, in order to ensure safe and reliable communication between the users and satellites, the elevation angle of the designed horizon plane is even higher. OneWeb constellation, for example, applies the elevation for the designed horizon plane of 55° for users’ stations (Yang, 2018).
Starlink, for the first shell (layer at the altitude of 550 km), applies an elevation angle for the designed horizon plane at 40° for users, with a tendency to change it or to apply for other shells the elevation of 25° for users. Because of that, for further simulations and analyses, the elevation of the designed horizon plane for users is treated from 25° to 40° in steps by 5°.
Further, let us mathematically move forward with calculations related to the slant range between the satellite and the ground station (user). In Figure 3 is shown the triangle, describing satellite, ground station, and Earth’s center, which can be seen in other two papers (Cakaj et al., 2011; Cakaj et al., 2014). It is in details analyzed the slant range which is mathematically given as:
where
For
This range under the lowest possible elevation angle
Finally, the virtual geographical distance between points of AOS and LOS in space, under elevation
and schematically shown in Figure 4, denoted as IHPW.
The minimal distance between the satellite and the ground station happens under the event of the Max-El (Maximal Elevation) of the appropriate satellite pass, and it is expressed as:
and for the special case of:
Now, let us assume that the designed horizon plane is defined by the lowest elevation
The maximal distance between the satellite and the ground station (user) for (
Finally, the satellite’s movement within its own orbit related to the designed horizon plane at
Thus, the line connecting AOS
where
A further step is to find out what the designed horizon plane wideness compared to the ideal one is and how far they are from each other. Looking from the ground station (user), the designed horizon plane wideness (DHPW) is the base of virtual up napped cone with the apex exactly at the ground station (user). The designed horizon plane wideness (DHPW) is in fact the diameter of the base of the appropriate virtual cone. Solving the triangle ground station (user)—AOS
Denoting by
The slant range between the satellite and the user changes over time, causing different signal delays from the satellite to the user or vice versa. Denoting signal delay (latency) by τ, for the satellite path seen from the user, on one way communication, the signal delay ranges as:
Based on Eq. 6 and considering the light speed
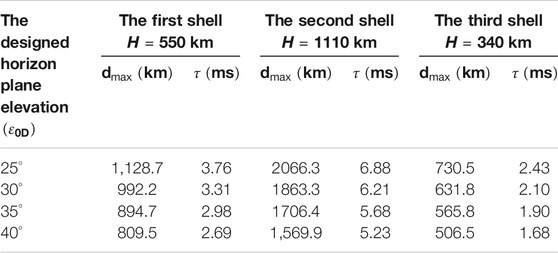
TABLE 2. Maximal distance and one-way signal delay for the different shells.
For three Starlink altitudes, H = 550, 1,110, and 340 km, and designed elevation

TABLE 3. IHPW, DHPW, and LDHPW for the different shells.
Table 2 confirms that the round-trip time, for each of the satellite shells, will not take longer than 15 ms (based on the second shell) for the communication of the user with the single satellite. For the continuity of services, more satellites may be involved in communications even from the different shells, adding delay, but in the worst case will still remain under 100 ms, which may be considered as negligible for communications (Gojal et al., 1998; Zong and Kohani, 2019).
Obviously, from Tables 2 and 3, the largest designed horizon plane width will have the second shell under altitudes of 1110 km. Among these three shells, the shortest distance will be for the third shell at altitudes of 340 km, and consequently offer the lowest signal delay.
Considering the last data by early April 2021, SpaceX had launched 1380 Starlink satellites at the first shell at an altitude of 550 km, which are already under testing operation and providing services for users under designed elevation of 40°. In order to create the feeling of dimensions in space, Figure 5 discusses and calculates space parameters as: maximal slant range between the user and the ground station [dmax (km)], the ideal horizon plane seen from the user’s point [IHPW (km)], the designed horizon plane under elevation of 40° [DHPW (km)], and the parallel distance in between the ideal and designed horizon plane LDHPW (km) seen from the user station.
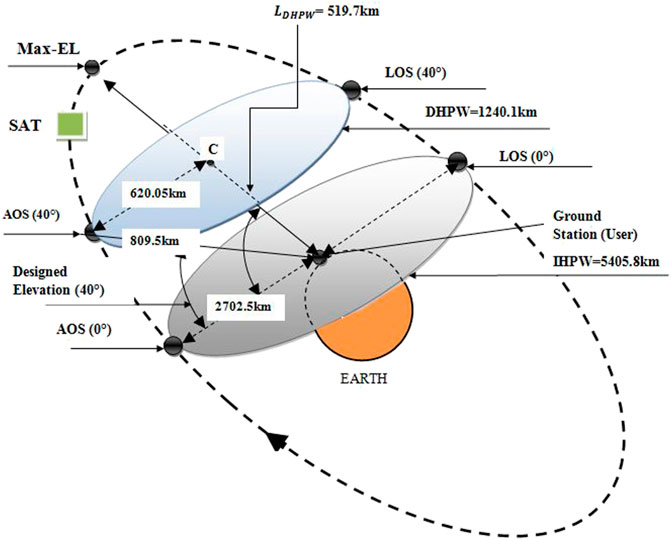
FIGURE 5. IHDW, DHPW, dmax, and LDHPW dimensions for H = 550 km.
Often there is confusion between the coverage area and the ideal/designed horizon plane. For clarification, the coverage area of a single satellite is a circular area on the Earth’s surface from where the satellite can be seen under an elevation angle. The largest coverage area is achieved under an elevation of 0°. The ideal horizon plane is the virtual flat surface laid perpendicularly on Earth’s radius vector (Figure 3). The designed horizon plane is parallel with the ideal one distanced from it by the distance (
The satellite’s coverage area on the Earth is determined by orbital parameters. The simulated coverage area based on the LEO satellite orbital parameters is given in Figure 6. The user on ground (defined as LUTKOS for simulation purposes) is locked with the LEO satellite since it is under coverage area (satellite footprint). The lock is symbolized with the line connecting the LUTKOS and the satellite SAT (Cakaj, 2010; Cakaj et al., 2014).
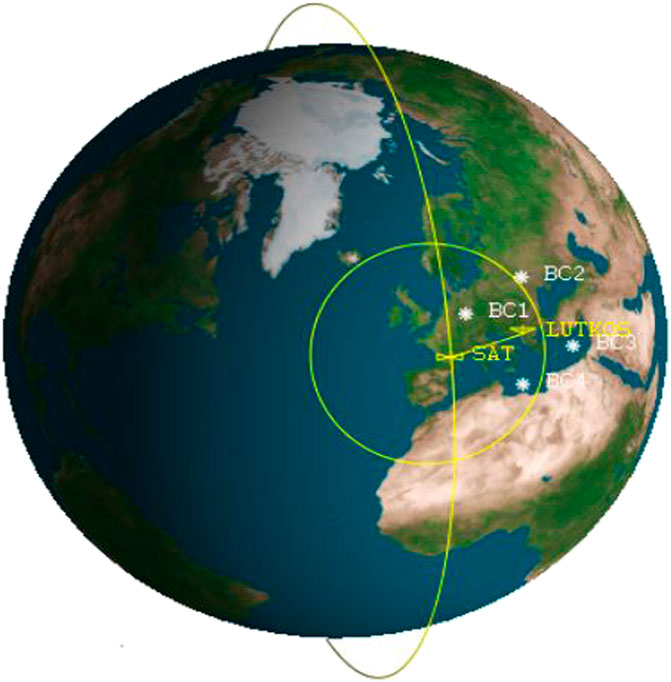
FIGURE 6. Simulated LEO satellite’s coverage area.
For simulation purposes and coverage interpretation, four more basic communication points (BC) are given, as BC1, BC2, BC3, and BC4. Under the case presented in Figure 6, only two of them (BC1 and BC4) can be locked with the satellite since they are within the satellite’s footprint, and two others (BC2 and BC3) are out of the footprint, so no communications are possible. This means that BC1 and BC4 can communicate with each other intermediated by the satellite, but not with BC2 and BC3 since the last ones are not accessible by the satellite. This is known as the communication within coverage area (footprint) or as individual satellite coverage. As a satellite moves down in its orbit, the coverage area also vertically moves, leaving the ground station (LUTKOS) and two base stations (BC1, BC4) out of the footprint and consequently losing communication (Cakaj, 2010; Cakaj et al., 2014).
Recently satellite services have been oriented towards global coverage. The global satellite coverage can be considered as an interoperable complementary networking process of multiple satellites organized in a constellation, each of them contributing with its individual coverage (Seyedi and Safavi, 2012; Papapetrou et al., 2003).
Let us further suppose the second LEO satellite with the same altitude is orbiting the Earth in Figure 6. Since both have the same altitude, the dimensions of the satellite area are the same, just covering different zones. Let us suppose that coverage areas are adjacent, so the second satellite is covering basic communication points BC2 and BC3. This means that BC2 and BC3 can communicate with each other intermediated by the second satellite, but not with BC1 and BC4 since the last ones are not accessible by the second satellite. If the first and second satellite can communicate with each other, these satellites will enable communication among all four basic communication points. This is an interoperability complementary process by two satellites providing communications within two coverage areas. This concept, step by step, adding more satellites, provides the global coverage. LEO satellites organized in constellations act as a convenient network solution for real-time global coverage (Seyedi and Safavi, 2012; Papapetrou et al., 2003).
The ambition to achieve full coverage with LEO satellites Starlink constellation has become very attractive to researchers. This could be achieved, since as LEO satellites move vertically along with their coverage area, but at the same time as the Earth rotates around its N-S axis the coverage area also virtually moves horizontally. In this way, each individual satellite of constellation contributes with its coverage towards global coverage created by the interoperability of all of them. Towards global coverage stands very complex simulation process for optimized coverage and reliable communications. The main issue for the global coverage is the intersatellite handover process (Seyedi and Safavi, 2012; Papapetrou et al., 2003), which is further elaborated under the last section.
The satellite’s coverage area is determined as a fraction of the Earth’s surface, and usually expressed as a percentage. The coverage area concept is given in Figure 7. There are two triangles in Figure 7. The larger one represents the case of the full LEO coverage under elevation of
Further applying sinus theorem is:
The full coverage is achieved for
By definition, the coverage
From (Cakaj et al., 2014), even from elementary geometry it is:
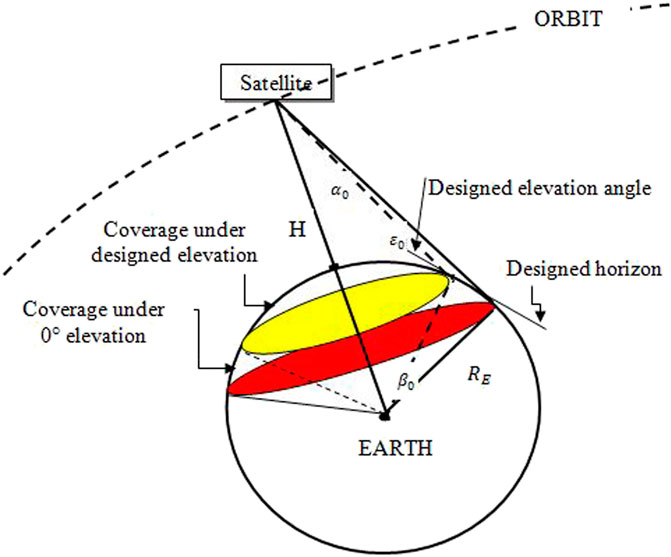
FIGURE 7. The coverage area concept.
The coverage area calculation will now be elaborated. For the Starlink constellation, considering three shells at altitudes of H = 550, 1,110, and 340 km for the full coverage under elevation of
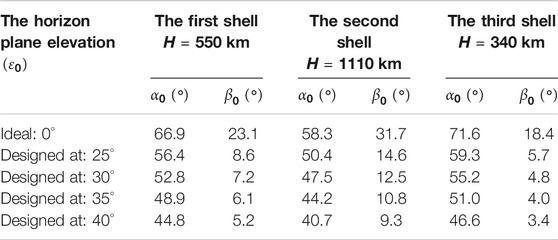
TABLE 4. Nadir angle and central angle for different elevations.
Applying the above calculated
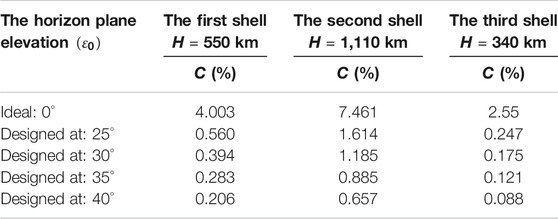
TABLE 5. Coverage of the Starlink satellites.
Earth’s area is 510 million km2, thus with a LEO satellite at an altitude of 550 km under an elevation of 40°, an area of 0.00206 × 510 million km2 = 1.05 million km2 is covered, with an approximate radius of 580 km.
Further, all above discussions and results are applied to geometrically interpret and confirm the handover-takeover (known as just handover) process between two LEO satellites, toward achieving global coverage and continuity of real-time services.
For tracking the satellites, real-time software fed by Kepler elements is applied. The respective software provides real-time tracking information, usually displayed in different modes (satellite view, radar map, tabulated, etc). The “radar map” mode is further considered for the intended geometrically handover-takeover process interpretation. The “radar map” mode includes an accurate satellite path with the ground station considered at the center, as is presented in Figure 8 (Cakaj et al., 2011; Cakaj et al., 2014).
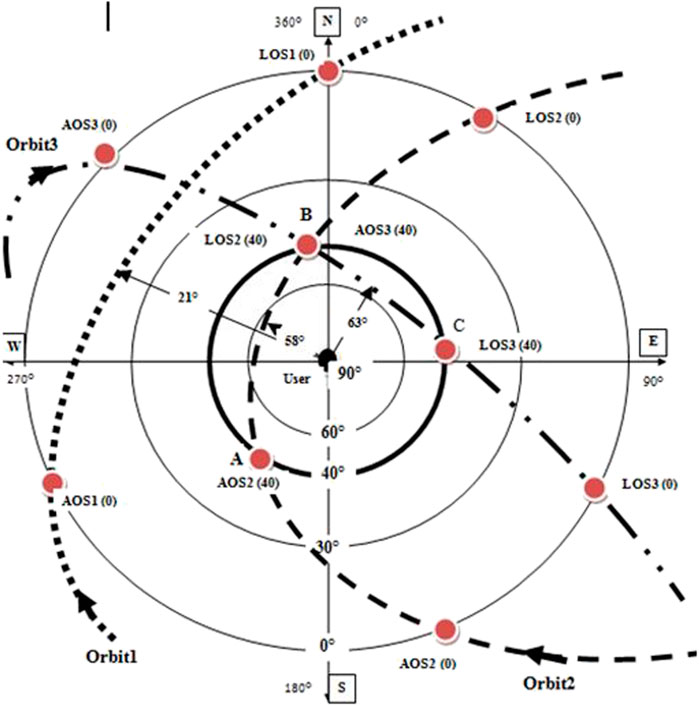
FIGURE 8. Geometrical interpretation of the handover-takeover process.
The perimeter of the circle is the user’s horizon plane, with North on the top (Az = 0°, 360°), then East (Az = 90°), South (Az = 180°), and West (Az = 270°). The user is located at the center of the horizon plane. Three concentric circles represent different elevations: 0°, 30°, and 60°. At the center the elevation is 90°. The plane at 0° elevation represents the ideal horizon plane. Most software parameters which define the movement of the satellite related to the user are: AOStime—Acquisition of the satellite (time), LOStime—Loss of the satellite (time), AOSAz—Acquisition of the satellite (azimuth), LOSAz—Loss of the satellite (azimuth) and Max El—Maximal Elevation (Cakaj et al., 2011; Cakaj et al., 2014). For LEO satellites, the maximal elevation is the main parameter of the satellite passing over the user station and determines the communication duration between the LEO satellite and the respective user station. The horizon plane with a predetermined minimal elevation is considered the designed horizon plane. For Starlink satellites, the designed horizon plane for users is determined at 40° and presented as the thicker black circle indicated by 40° in Figure 8.
For interpretation and confirmation purposes three randomly chosen orbits are identified as Orbit1, Orbit2, and Orbit3, along with appropriate satellites for each of them. For each orbit an arrow identifying the satellite’s movement direction seen from the user is given. The user is located at the center. At each orbit are identified points of Satellite Acquisition (AOS) and Satellite Loss (LOS) in space. Since this is only a geometrical approach, time as a variable it is not considered. The Acquisition and the Loss of the satellites are considered for the ideal horizon plane at (0°) and for the designed horizon plane at (40°), designated as AOS(0), AOS(40) and LOS(0), and AOS(40), respectively. These events in space are determined by azimuth and elevation. Each of three passes is determined by its own Maximal Elevation, and by the appropriate azimuth. For all points indicated in Figure 8, the coordinates are given in Table 6 as pairs of Azimuth and Elevation [Az°, El°]. The values are extracted and approximated from Figure 8, since the orbits are randomly chosen.
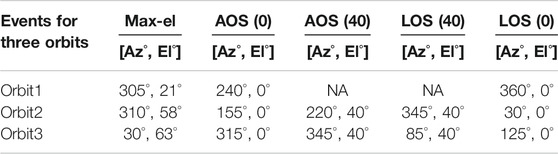
TABLE 6. Coordinates of the satellites space events.
A satellite flying at Orbit 1 appears at the user’s ideal horizon plane approximately at an azimuth of 240° at 0° elevation, noted as event AOS1(0). The satellite moves higher, achieving the Max-El of 21° (at Az = 305°) and then down to the event LOS1(0) at coordinates [360°, 0°] and disappearing from the user’s ideal horizon. The user and this satellite had no communication, since the satellite is always lower than user’s designed horizon plane at 40° (21° < 40°), and consequently not locked. Thus, this satellite moves away unseen from the user. This fact explains the NA (not applicable) result of AOS(40) and LOS(40) for Orbit1.
The satellite flying at Orbit 2 appears at the user’s ideal horizon plane approximately at an azimuth of 160° at 0° elevation, noted as the event AOS2(0) but not locked with the user. The satellite moves higher to the event AOS2(40) at coordinates (Az = 220°, 40°) where the satellite is locked with the user, establishing communication. The range between the satellite and the user at this point is 809.5 km (Table 2). The satellite moves higher toward Max El event at coordinates (Az = 310°, 58°) still in communication with the satellite and being closest with it at a distance of 641.4 km. The satellite moves down, still in communication, towards the event LOS2(40) at coordinates (Az = 345°, 40°) having again the range of 809.5 km. At this point the satellite leaves the user’s designed horizon plane and unlocks communication. The satellite moves further to the event LOS2(0) at coordinates (Az = 30°, 0°) and leaves the user’s ideal horizon plane. For further purposes, points AOS2(40) and LOS2(40) are respectively noted as A and B. So, during Orbit 2, the user and the satellite communicated from point A to B, with range variation from 641.4 to 809.5 km, and consequently one-way signal delay varies from 2.13 to 2.69 ms.
The satellite flying at Orbit 3 appears at the user’s ideal horizon plane approximately at an azimuth of 315° at 0° elevation, noted as the event AOS3(0) but not locked with the user. The satellite moves higher to the event AOS3(40) at coordinates (Az = 345°, 40°) where the satellite is locked with the user, establishing communication. The range between the satellite and the user at this point is 809.5 km (Table 2). The satellite moves higher toward Max El event at coordinates (Az = 30°, 63°) still in communication with the satellite and being closest with it at the distance of 611.2 km. The satellite moves down, still in communication, toward the event LOS3(40) at coordinates (Az = 85°, 40°) having again the range of 809.5 km. At this point the satellite leaves the user’s designed horizon plane and unlocks communication. The satellite moves further to the event LOS3(0) at coordinates (Az = 125°, 0°) and leaves the user’s ideal horizon plane. For further purposes, points AOS3(40) and LOS3(40) are respectively noted as B and C. So, during Orbit 3, the user and the satellite communicated from point B to C, with range variation from 611.2 to 809.5 km, and consequently one-way signal delay varies from 2.03 to 2.69 ms.
The user communicated with the satellite in Orbit 2 from point A to B. The same user communicated with the satellite in Orbit 3 from point B to C. Point B identifies the loss of the satellite in Orbit 2 from the user’s designed horizon plane [event LOS2(40)] and the acquisition of the satellite in Orbit 3 by the user’s designed horizon plane [event AOS 3(40)]. If the satellite in Orbit 2 can communicate by intersatellite communication protocol with the satellite in Orbit 3 at this point (zone), establishing the handover-takeover process between satellites in Orbit2 and Orbit3, uninterrupted communication between the user and the constellation from point A to C will be ensured. Thus, over the handover-takeover process at point B ensures the continuity of services for the user, and keeps communication from A to C. This geometrical interpretation confirms the continuity of services by two satellites. The same applies for more of them.
This is a highly coordinated and synchronized process (interpretation of this will be my next work). To facilitate the handover-takeover process the LEO satellites’ coverage areas (zone around 1 million km2) are overlapped by a few degrees, the overlapped zone are used exactly for the handover-takeover process. For this process, the satellites must be adjacent to each other and able to intercommunicate (Cakaj et al., 2010b). To further illustrate the handover-takeover process in space, let us assume that this process will happen at 39° elevation for satellite in Orbit 2 (just 1° before leaving the user’s horizon plane) and at 41° elevation for satellite in Orbit 3 (just 1° before entering the user’s horizon plane). The difference in 2° is ensured by overlapping. Can these two satellites communicate with each other to provide the handover-takeover process between the satellite in Orbit 2 and satellite in Orbit 3? Seen from the user under 39°, the satellite in Orbit 2 is far 827.9 km, ready for the handover process and ready to leave the designed horizon plane. On the other side the satellite in Orbit 3 at an elevation of 41° is 800.6 km far from the user, ready to enter into the user’s designed horizon plane and to take over the communication from the satellite in Orbit 2 by itself. In these positions these satellites can intercommunicate. Applying cosines rule these satellites are far from each other, around 40 km in space, so can easily communicate with each other providing the handover-takeover process. Finally, this is geometrical confirmation of the handover takeover process, what proves the continuity of real-time services by satellites, including broadband worldwide internet services, which are the main goal of the Starlink.
This paper will conclude with Table 7, providing the satellite moving parameters, slant range, horizon view and coverage parameters, for easy comparison. Parameters dependent on elevation are considered under a designed elevation of
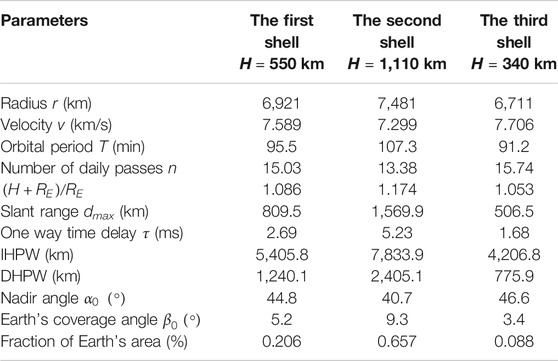
TABLE 7. Parameters comparison of three orbit shells of Starlink LEO constellation
Analyses and appropriate comparisons among different LEO shells confirm that the Starlink constellation is a very convenient structure for a satellite terrestrial network to provide reliable worldwide broadband services with low latency, even when more satellites are included in the communication process.
A too low fraction of the Earth’s surface covered by LEO satellites, even with no overlapping, justifies the large number of satellites in constellation to be applied, to ensure safe communication and for the real-time continuity of services.
Analysys related to the ideal and designed horizon plane with exactly calculated results represents the novelty in this paper, used further for the geometrical interpretation and confirmation of the handover process among the satellites to provide uninterrrupted services.
The closing table provides all data related to the satellite’s behavior in space within each Starlink orbital shell.
The step taken forward by SpaceX deploying the LEO Starlink constellation to cover the Earth with satellites for ubiquitous broadband services represents a gigantic technological step for worldwide human equality, but with a lot of challenges to be faced in the future.
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
Author established mathematical and geometrical correlation between ideal and designed ground station’s (user’s) horizon plane, with exactly calculated results related to “Starlink” shells. Results are further applied for geometrical interpretation and confirmation of the handover process for the continuity of the real time services. The author confirms being the sole contributor of this work and has approved it for publication.
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Botta, A., and Pescape, A. (2013). New generation satellite broadband Internet service: should ADSL and 3G worry. Italy: Turin. TMA 2013, co-lacted with IEEE INFOCOM 2013, April 2013.
Cakaj, S., Kamo, B., Kolici, V., and Shurdhi, O. (2011). The Range and Horizon Plane Simulation for Ground Stations Of Low Earth Orbiting (LEO) Satellites. Ijcns 04 (09), 585–589. doi:10.4236/ijcns.2011.49070
Cakaj, S., Fischer, M., and Schotlz, L. A. (2009). Sun synchronization of low earth orbits (LEO) through inclination angle. Proceedings: 28th IASTED International Conference on Modelling, Identification and Control, MIC. Austria: Innsbruck, 155–161.
Cakaj, S., Fitzmaurice, M., Reich, J., and Foster, E. (2010a). Simulation of local user terminal implementation for low earth orbiting (LEO) search and rescue satellites. Proceedings: The Second International Conference on Advances in Satellite and Space Communications SPACOMM 2010, IARIA. Athens, Greece: IEEE, 140–145.
Cakaj, S., Fitzmaurice, M., Reich, J., and Foster, E. (2010b). The downlink adjacent interference for low earth orbiting (LEO) search and rescue satellites. Ijcns 03 (2), 107–115. doi:10.4236/ijcns.2010.32016
Cakaj, S., Kamo, B., Lala, A., Agastra, E., and Shinko, I. (2015). The velocity increment for Hohmann coplanar transfer from different low earth orbits. Fae 4 (1), 35–41. doi:10.12783/fae.2015.0401.04
Cakaj, S., Keim, W., and Malaric, K. (2005). Sun noise measurement at low earth orbiting satellite ground station. Proceedings: 47th International Symposium ELMAR 2005 focused on Multimedia Systems and Applications. Zadar, Croatia: IEEE, 345–348.
Cakaj, S., Kamo, B., Lala, A., and Rakipi, A. (2014). The Coverage Analysis for Low Earth Orbiting Satellites at Low Elevation. Int. J. Adv. Comp. Sci. Appl. 5 (6), 6–10. doi:10.14569/ijacsa.2014.050602
Cakaj, S. (2010). Local user terminals for search and rescue satellites. Saarbrucken, Germany: VDM Publishing House.
Cakaj, S., and Malarić, K. (2007). Rigorous analysis on performance of LEO satellite ground station in urban environment. Int. J. Satell. Commun. Netw. 25 (6), 619–643. doi:10.1002/sat.895
Cakaj, S. (2009). Practical Horizon Plane and Communication Duration for Low Earth Orbiting (LEO) Satellite Ground Stations.. WSEAS J. Trans. Commun. 8 (4), 373–383. ISSN:1109-2742, doi:10.5555/1558727.1558728
Cochetti, R. (2015). “Low earth orbit (LEO) mobile satellite communications systems,” in Mobile satellite communications handbook (Hoboken, NJ: Wiley Telecom), 119-155.
De Selding, B. P. (2015). Virgin, Qualcomm Invest in OneWeb Satellite Internet Venture. Paris: SpaceNews.
Foust, J. (2018). Data From: Telesat to Announce Manufacturing Plans for LEO Constellation in Coming Months. Toronto: SpaceNews. Available at https://spacenews.com/telesat-toannounce-manufacturing-plans-for-leo-constellation-in-coming-months. (Accessed January 17, 2021).
Garner, P., Cooke, D., and Haslehurst, A. (2009). Development of a scalable Payload Downlink chain for highly agile earth observation missions in Low Earth Orbit. Proceedings: 4th International Conference Recent Advances in Space Technologies. 529‐534. Turkey: Istanbul.
Geospatial World (2021). Data from: how many satellites orbit Earth? https://www.geospatialworld.net/blogs/how-many-satellites-orbit-earth-and-why-space-traffic-management-is-crucial/ (Accessed January 17, 2021).
Gojal, R., Kota, S., Jain, R., Fahmy, S., Vandalore, B., and Kallaus, J. (1998). Analysis and Simulation of Delay and Buffer Requirements of Satellite-ATM Networks for TCP/IP Traffic. J. Selected Areas Commun., 1–24. arXiv:cs/9809052.
List of spacecrafts deployed from the International Space Station (2020). https://en.wikipedia.org/wiki/List_of_spacecraft_deployed_from_the_International_Space_Station (Accessed December 25, 2020).
Lutz, E., Werner, M., Jahn, A. (2012). Satellite Systems for Personal and Broadband Communications. Berlin, Germany: Springer-Verlag.
Oberright, E. J. (2004). Satellite Artificial World Book Online Reference Center. Chicago: World Book, Inc.
Papapetrou, P., Karapantazis, S., and Pavlidou, N. F. (2003). Handover policies in LEO systems with satellite diversity. Proceedings: International Conference on Advanced Satellite Mobile Systems (ASMS 2003). Frascati, Italy.
Pultarova, T., and Henry, C. (2017). OneWeb Weighing 2,000 more Satellites. Washington D.C.: SpaceNews.
Reddit (2020). https://www.reddit.com/user/mscout206/ (Accessed November 15, 2020).
Seyedi, Y., and Safavi, M. S. (2012). On the analysis of random coverage time in mobile LEO satellite communications. Commun. Lett. IEEE 16 (5). doi:10.1109/lcomm.2012.031912.112323
Sheetz, M. (2019). Data from: Investing in Space: Amazon Wants to Launch Thousands of Satellites So It Can Offer Broadband Internet From Space. Washington D.C.: CNBC. https://www.cnbc.com/2019/04/04/amazon-project-kuiper-broadbandinternet-small-satellite-network.html [Accessed January 17, 2021).].
Starlink (2020). https://en.wikipedia.org/wiki/Starlink#Global_broadband_Internet (Accessed January 17, 2021).
Starlink Satellite Missions (2020). https://directory.eoportal.org/web/eoportal/satellite-missions/s/starlink (Accessed January 17, 2021).
Van Allen radiation belt (2020). https://en.wikipedia.org/wiki/Van_Allen_radiation_belt (Accessed December 15, 2020).
Yang, X. (2018). Low Earth orbit (LEO) Mega constellations – satellite and terrestrial integrated communication networks. Surrey GU2 7XH, UK: Institute for Communication Systems Faculty of Engineering and Physical Sciences University of Surrey Guildford, 196. [dissertation thesis].
Zee, R. E., and Stibrany, P. (2002). Canada's first microsatellite - an enabling low-cost Technology for future space science and Technology missions. Can. Aeronaut. Space J. 48 (1), 1–11. doi:10.5589/q02-008
Keywords: low Earth orbits, constellation, range, horizon plane, delay, coverage, handover
Citation: Cakaj S (2021) The Parameters Comparison of the “Starlink” LEO Satellites Constellation for Different Orbital Shells. Front. Comms. Net 2:643095. doi: 10.3389/frcmn.2021.643095
Received: 17 December 2020; Accepted: 19 February 2021;
Published: 07 May 2021.
Edited by:
Chao Feng Zhang, Advanced Institute of Industrial Technology, JapanReviewed by:
Wael Jaafar, Carleton University, CanadaCopyright © 2021 Cakaj. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Shkelzen Cakaj, U2hrZWx6ZW4uY2FrYWpAZnVsYnJpZ2h0bWFpbC5vcmc=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.