 Kenji Fujii
Kenji Fujii
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Built Environ., 09 April 2025
Sec. Earthquake Engineering
Volume 11 - 2025 | https://doi.org/10.3389/fbuil.2025.1561534
This article is part of the Research TopicBehavior of Buildings under Seismic SequencesView all articles
In major seismic events (e.g., the 2011 Tohoku-Taiheiyou-Oki Earthquake, the 2016 Kumamoto Earthquake in Japan, and the 2023 Kaharamanmaraş Earthquake in Turkey), many building structures are subjected to a series of earthquake sequences. Therefore, evaluating the seismic demands of building structures under earthquake sequences is important. This article proposes extended critical pseudo-multi impulse (PMI) analysis considering sequential input. In this extended PMI analysis, seismic input is modeled as two parts of multi impulses (MIs). The parameters of the seismic input are (a) the pulse velocities of the first and second MIs, (b) the number of impulsive lateral forces of the first and second MIs, and (c) the length of the interval between the two MIs. In the numerical analysis, the peak and cumulative responses of an eight-story reinforced concrete (RC) moment-resisting frame (MRF) with steel damper columns (SDCs) subjected to the earthquake sequence recorded during the 2016 Kumamoto Earthquake were predicted using the proposed extended critical PMI analysis. For this prediction, the pulse velocities of the first and second MIs were determined based on the maximum momentary input energy of the input ground motions. The main findings are as follows. (1) The accuracy of the predicted peak response of RC MRFs with SDCs subjected to earthquake sequences from the extended critical PMI analysis was satisfactory. (2) The accuracy of the cumulative response of RC MRFs with SDCs depended on the ground motion records and the number of impulsive lateral forces of the first and second MIs.
The purpose of seismic design of structures is to provide enough seismic capacity to withstand expected large earthquakes. Although structures have been subjected to series of earthquake sequences in past major seismic events (e.g., the 2011 Tohoku-Taiheiyou-Oki Earthquake in Japan, the 2016 Kumamoto Earthquake in Japan, and the 2023 Kaharamanmaraş Earthquake in Turkey), the “design” earthquake considered in most seismic design codes is a single seismic event. In most modern seismic design codes, a structure designed in a ductile manner (e.g., a moment-resisting frame; MRF) is allowed to respond beyond the elastic range in the case of large earthquakes. When the “design” earthquake occurs, some level of plastic deformation of structural members in such MRFs is expected. However, in the case of an earthquake sequence, the accumulation of damage (seismic energy absorption) in structural members may be progressive. Therefore, the influence of earthquake sequences on the seismic performance of building structures should be considered for better seismic design.
The steel damper column (SDC; Katayama et al., 2000) is an energy dissipation device that is suitable for mid- and high-rise reinforced concrete (RC) housing buildings. SDCs can be easily installed in a RC MRF because they minimize obstacles in architectural planning. An RC MRF with SDCs can be considered as a damage-tolerant structure (Wada et al., 2000); SDCs behave as sacrificial members that absorb seismic energy prior to the RC beams and columns. Such structures are expected to perform better during earthquake sequences than an RC MRF without energy dissipation devices. The author’s research group has studied a simplified seismic design procedure for an RC MRF with SDCs (Mukouyama et al., 2021), and a simplified procedure to predict the peak and cumulative responses of an RC MRF with SDCs based on the energy concept (Fujii and Shioda, 2023). In the case of earthquake sequences, the nonlinear responses of a ten-story RC MRF with and without SDCs under the records of the 2016 Kumamoto Earthquake were examined based on NTHA results in a previous study (Fujii, 2022). Extension of the simplified procedure (Fujii and Shioda, 2023) for application in the case of an earthquake sequence is the next target of study. To this end, the change of characteristics of a structure due to the response the structure previously experienced (e.g., the elongation of natural periods or reduction of seismic absorption capacity) must be considered. Many researchers have investigated the responses of structures under earthquake sequences by conducting NTHA. Most of these studies can be divided into two groups according to the ground motion sequences: as-recorded ground motion sequences, and “artificial” ground motion sequences [e.g., applying the same ground acceleration several times (repeated approach), or choosing different ground accelerations at random (randomized approach)].
Mahin (1980) studied the response of a single-degree-of-freedom (SDOF) model with an elastic-perfectly-plastic hysteresis model subjected to the mainshock of 1972 Managua Earthquake with two large aftershocks. Amadio et al. (2003) studied the nonlinear response of SDOF systems subjected to repeated earthquakes, applying a repeated approach. Similarly, Hatzigeorgiou and Beskos (2009) studied the inelastic displacement ratio for SDOF systems by applying the repeated approach. One reason to apply the repeated approach is that the study will be very complex when real seismic sequential accelerations with different characteristics (e.g., frequency, duration) are applied. To avoid bias caused by the repeated approach, Hatzigeorgiou (2010a), Hatzigeorgiou (2010b) analyzed the nonlinear response of SDOF systems subjected to random sequences. In addition, Hatzigeorgiou and Liolios (2010) studied the nonlinear response of a multi-degree-of-freedom (MDOF) system subjected to as-recorded ground motion sequences, analyzing the response of planar RC frames. Ruiz-García and Negrete-Manriquez (2011) compared the nonlinear response of planar steel frames subjected to as-recorded ground motion sequences and artificial ground motion sequences. They concluded that the artificial sequences (repeated approach) led to overestimation of the maximum lateral demands. They also pointed out that the repeated approach was insufficient to model the earthquake sequences, because the frequency characteristics of the aftershock records differed from those of corresponding mainshock records. The nonlinear response of frame models subjected to artificial sequential earthquakes (repeated approach or random approach) were compared by Ruiz-García (2012a).
Since 2012, the number of studies on the nonlinear responses of structures subjected to earthquake sequences has been increasing. One reason for this may be the occurrences of the Christchurch Earthquake in New Zealand in 2010–2011 and the 2011 Tohoku–Taiheiyo–Oki Earthquake in Japan. As-recorded earthquake sequences have been used in many studies after 2010 (Abdelnaby and Elnashai, 2014; Abdelnaby, 2016; Di Sarno, 2013; Di Sarno and Amiri, 2019; Di Sarno and Pugliese, 2021; Di Sarno and Wu, 2021; Elenas et al., 2017; Hatzivassiliou and Hatzigeorgiou, 2015; Hosseinpour and Abdelnaby, 2017; Hoveidae and Radpour, 2021; Kagermanov and Gee, 2019; Oyguc et al., 2018; Qiao et al., 2020; Ruiz-García, 2012b; Ruiz-García, 2013; Ruiz-García et al., 2018; Ruiz-García and Olvera, 2021; Soureshjani and Massumi, 2022; Yaghmaei-Sabegh and Ruiz-García, 2016; Yaghmaei-Sabegh and Mahdipour-Moghanni, 2019; Wen et al., 2020; Zhai et al., 2012; Zhai et al., 2014). In addition, artificial ground motion sequences have been applied in many studies since 2012 (Abdelnaby and Elnashai, 2015; Faisal et al., 2013; Goda, 2012a; Goda, 2012b; Goda, 2014; Goda et al., 2015; Han et al., 2017; Orlacchio et al., 2021; Oyguc et al., 2023; Ruiz-García et al., 2012; Ruiz-García et al., 2013; Tesfamariam et al., 2015; Tesfamariam and Goda, 2017; Yang et al., 2021; Yang et al., 2019; Zhai et al., 2013). Specifically, Yaghmaei-Sabegh and Ruiz-García (2016) studied the case of a “doublet earthquake,” a pair of seismic events that take place closely spaced in time and location; this differs from the mainshock–aftershock sequences on which most studies have focused. They also showed that in a doublet earthquake, the characteristics of the first and second mainshock differ. Therefore, even in the case of a doublet earthquake, the repeated approach is unrealistic. To verify the artificial sequence method, Goda (2012b) compared the probability of peak ductility demand calculated from an artificial sequence and an as-recorded sequence. In this generation method of artificial mainshock–aftershock sequences, the generalized Ohmori’s law was implemented. The calculated ductility demand from Gota’s artificial sequence was consistent with that calculated using as-recorded sequences. A similar conclusion was reached by Yaghmaei-Sabegh and Mahdipour-;Moghanni (2019).
The brief review of these studies above indicates that the kinds of sequential input considered for analyzing the behavior of structures is key. As described above, the repeated approach, although simple, is unrealistic. The use of as-recorded sequences is the most realistic; however, because the characteristics of aftershock ground motions are different from those of mainshock ground motions, the complexity of the analysis results would increase.
The term “energy” is useful for understanding the nonlinear behavior of structures (e.g., Akiyama, 1985; Akiyama, 1999; Uang and Bertero, 1990). The total input energy, or the equivalent velocity of the total input energy (
Kojima and Takewaki (2015a), Kojima and Takewaki (2015b), Kojima and Takewaki (2015c) introduced the concepts of the critical double impulse (DI) and critical multi impulse (MI) as substitutes for near-fault and long-duration earthquake ground motions, respectively. These concepts simplify seismic input by considering the most severe case for the structure of interest. In these studies, the critical response of an undamped SDOF model with elasto-plastic behavior was analyzed in the simple equations considering the energy balance (Kojima and Takewaki, 2015a; Kojima and Takewaki, 2015b; Kojima and Takewaki, 2015c). Then, Akehashi and Takewaki introduced the pseudo-double impulse (PDI) (Akehashi and Takewaki, 2021), and pseudo-multi impulse (PMI) (Akehashi and Takewaki, 2022a) to form the MDOF model. In PDI and PMI analysis, the MDOF model oscillated predominantly in a single mode, considering the impulsive lateral force corresponding to a certain mode vector. When the impulsive lateral force corresponding to the first mode vector was considered, the MDOF model oscillated predominantly in the first mode. In addition, Akehashi and Takewaki (2022b) proposed an adjustment method of DI to work as a real earthquake. Following their studies, this author has applied their PDI and PMI analyses to RC MRF with SDCs (Fujii, 2024a; 2024b), to verify the simplified procedure to predict the peak and cumulative responses of an RC MRF with SDCs based on the energy concept (Fujii and Shioda, 2023).
To the author’s knowledge, NTHA is thus far the only method to analyze the response of structures subjected to earthquake sequences. However, the results obtained from NTHA are too complex to derive general conclusions. This is because NTHA results are intricately intertwined with nonlinear structural characteristics and ground motion characteristics. In the case of an earthquake sequence, the complexity increases because of the combined mainshock–aftershock (or foreshock–mainshock, or doublet earthquake) ground motions. Therefore, extension of critical PMI analysis for the case of earthquake sequences may be a promising alternative. This is because the results of critical PMI analysis make it much easier to understand nonlinear structural characteristics. This was the main motivation of this study.
In this article, extended critical PMI analysis considering sequential input is proposed. The peak and cumulative responses of an eight-story RC MRF with SDCs subjected to the earthquake sequence recorded in the 2016 Kumamoto Earthquake were predicted using extended critical PMI analysis. This analysis is the updated version of the analysis reported in previous studies (Fujii, 2024a; Fujii, 2024b). In this proposed analysis, the seismic input was modeled as two parts of MIs. The parameters of the seismic input were (i) the pulse velocities of the first and second MI, (ii) the number of impulsive lateral forces of the first and second MI, and (iii) the length of the interval between the two MIs. For better prediction of structural responses under earthquake sequences, this study addresses the following questions.
(I) How should the pulse velocities of the first and second MIs be determined for better prediction of the peak response? Can they be determined based on the maximum momentary input energy spectrum (
(II) How can the number of impulsive lateral forces of the first and second MIs be determined for better prediction of the cumulative response (e.g., the cumulative strain energy of a damper panel in SDC)?
(III) Di Sarno et al. (2020) and Amiri et al. (2021) pointed out the importance of considering the relative difference between the incident angles of the mainshock and subsequent aftershocks. Although a planar frame analysis is considered here, the signs of the two MIs, which correspond to the conventional aftershock polarity (positive or negative), must still be accounted for. How will the signs of two MIs affect the responses of structures?
In the study of Akehashi and Takewaki (2022b), the intensity of pulses was determined based on the cumulative input energy spectrum (
Note that Miyake (2006) compared the low-fatigue test results of H-shaped steel columns and RC columns. In his study, he obtained (hysteretic dissipated energy) – (displacement amplitude) relationship of those members, by combining the (displacement amplitude) – (cycles to failure) relationship and (hysteretic dissipated energy) – (cycles to failure) relationship reported from the test results. He pointed out that RC column is more sensitive to displacement amplitude compare to the hysteretic dissipated energy. In the author’s opinion, although the discussions about the relationship between the hysteretic dissipated energy and peak displacement at failure is still open, his point is consistent with the studies prescribed above. However, this issue is the out of scope of this study.
The rest of this article is organized as follows. Section 2 outlines the critical PMI analysis considering sequential input and a scheme to predict the response of a structure under an earthquake sequence using critical PMI analysis. Section 3 presents an RC MRF building model with SDCs as well as ground motion sets and analysis methods. Section 4 compares the responses obtained from extended critical PMI analysis and NTHA using ground motion sets. The influence of the number of pseudo-impulsive lateral forces in the first and second MI on the accuracy of the predicted peak and cumulative responses is discussed in Section 5. Conclusions and further directions of study are discussed in Section 6.
Figure 1 outlines the extended critical PMI analysis considering sequential input. In this extended analysis, the seismic input is modeled as two parts of MIs. The first part of the multi-impulse is referred to as the “first MI,” whereas the second part is referred to as the “second MI.” In the case of a foreshock–mainshock sequence, the first and second MI correspond to the foreshock and mainshock, respectively.

Figure 1. Extended critical PMI analysis considering sequential input (in case of 1Np = 2Np = 4). (a) Equivalent SDOF model. (b) Building model oscillates in the first mode. (c) Time-history. (d) Hysteresis loop.
Kojima and Takewaki (2015c) formulated the time-history of ground acceleration (
In Equation 1,
Here,
Next, a planar frame building model (number of stories,
where
It should be emphasized that
The timing of the action of the
where
Therefore, in the case of the undamped model (
The timing of the action of the
The equivalent velocity of the first modal response just after the
Here,
In this PMI analysis, the pseudo-impulsive lateral force is proportional to the first mode vector (
The detailed flow of the analysis can be found in Supplementary Appendix S1 of this article.
The peak equivalent displacement of the first modal response during the first and second MIs (
In Equations 18, 19,
The energy balance of the first modal response at time
In Equation 21,
According to Hori and Inoue (2002), the momentary input energy of the first modal response per unit mass (
In Equation 23,
Therefore,
The calculated
Similarly, the momentary input energy of the first modal response per unit mass at time
The maximum momentary input energy of the first modal response per unit mass during the first and second MI (
The equivalent velocity of the maximum momentary input energy of the first and second MIs (
Therefore, the equivalent velocity of the maximum momentary input energy over the course of the entire sequential input (
Next, the response period of the first modal response during the first and second MIs (
The cumulative input energy of the first modal response per unit mass during the first and second MI (
The equivalent velocity of the cumulative input energy of the first and second MI (
Therefore, the equivalent velocity of the cumulative input energy over the course of the entire sequential input (
Predicting the response of a structure under an earthquake sequence using extended critical PMI analysis is addressed next. How the pulse velocity in the first and second MIs (
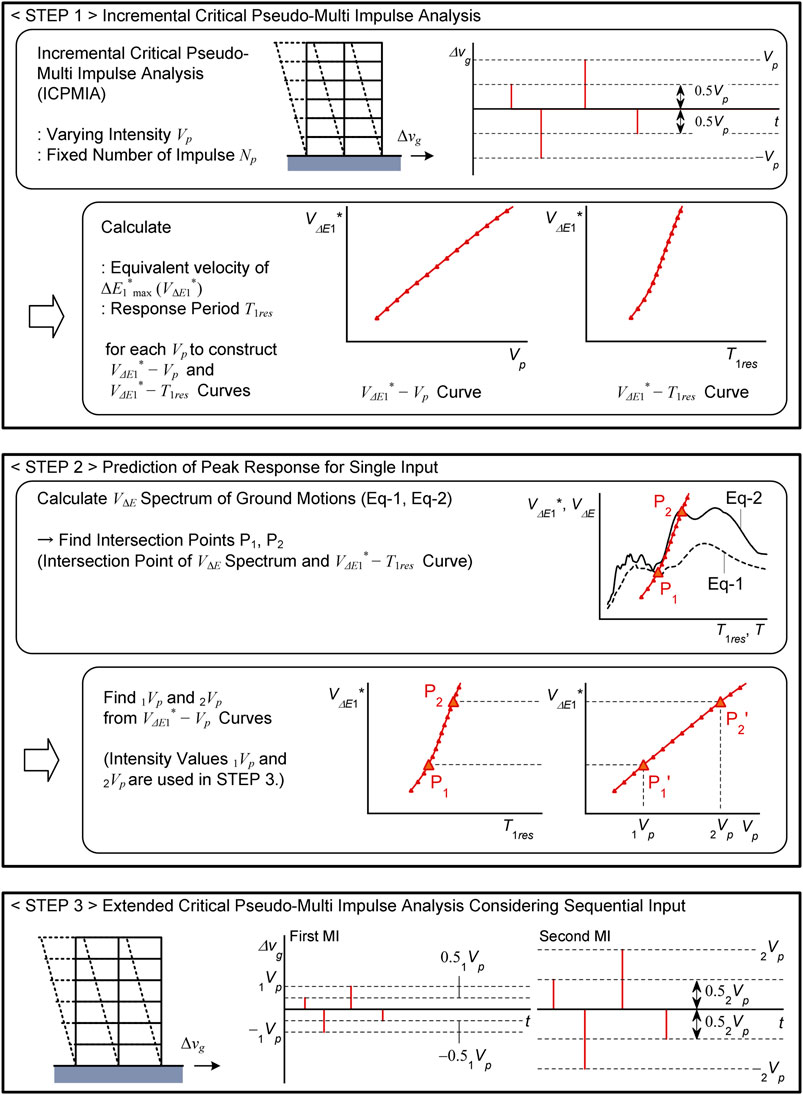
Figure 2. Scheme to predict response of a structure under earthquake sequence.
Incremental critical pseudo-multi impulse analysis (ICPMIA) of an
The
Then, the intersection point of the
An extended critical PMI analysis was carried out considering sequential input of the
The building model analyzed in this study was an eight-story housing building, shown in Figure 3. The longitudinal frames (Frames A and B, respectively) were assumed to continue endlessly, and the one-span area shown in this figure was modeled for the analysis. This building was an RC MRF with SDCs designed using simplified procedure in a previous study (Mukouyama et al., 2021). In the seismic design of this building model, the displacement limit

Figure 3. Building model. (a) Structural plan. (b) Structural elevation (Frame A).
In the structural modeling, only planar behavior in the longitudinal direction was considered. All frames are connected through a rigid slab. All RC members are modelled as a one-component model with a nonlinear flexural spring at each end, while steel damper columns are modelled as an elastic column with a nonlinear shear spring in the middle. The shear behavior of all RC members is assumed linear elastic. The axial behavior of all vertical members is assumed to be linearly elastic: the interaction of nonlinear behavior in axial force and bending moment of RC columns is not considered. The beam-column joint is assumed to be rigid. Because only a one-span area was extracted from endless longitudinal frames, the axial deformation of the boundary RC columns should be negligibly small. Therefore, the axial stiffness of the boundary RC columns was set to be 100 times the original calculated value by adjusting the value of sectional area. In addition, the stiffness and strength of the boundary RC columns were assumed to be 1/2 the original calculated value. The natural period of the first modal response in the elastic range was 0.459 s.
The nonlinear behavior of the RC members and SDCs was modeled as in previous studies (Mukoyama et al., 2021; Fujii, 2022; Fujii and Shioda, 2023), except for the hysteresis rule used for the RC beams. Figure 4 shows the hysteresis rule of the RC members and SDCs. Toyoda et al. (2014) compared shaking table test results of a 1/4-scale 20-story RC building model conducted at E-defense with NTHA results. They found that, for better prediction of the peak response, the influence of the pinching behavior of RC beams should be considered. Following their study, Shirai et al. (2024) demonstrated that the pinching behavior of RC members affected the peak responses of 40-story RC super-high-rise buildings. Therefore, the pinching behavior of RC beams was considered as described in a previous study (Fujii, 2024b). Here, two models shown in Figures 4a, b were considered for evaluating the influence of pinching behavior of RC beams to the response of RC MRF with SDCs under earthquake sequences: the parameter
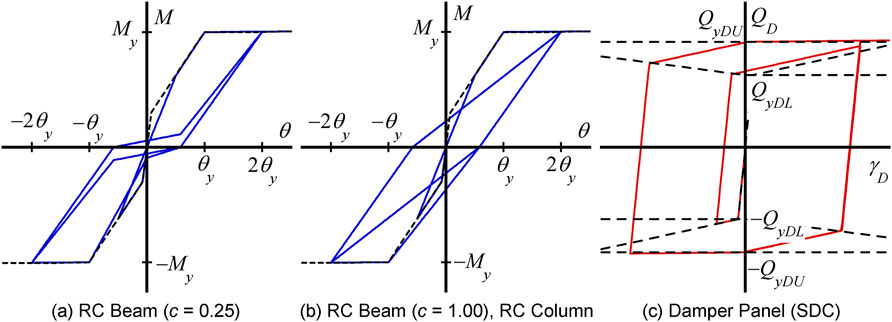
Figure 4. Hysteresis rule of RC members and SDCs. (a) RC beam (c = 0.25). (b) RC beam (c = 1.00), RC column. (c) Damper panel (SDC).
In this study, the same ground motion records used in a previous study (Fujii, 2022) were used: the records of accelerations of the foreshock (event time: 14 April 2016, 21:26 (JST), JMA magnitude 6.5) and mainshock (event time: 16 April 2016, 01:25 (JST), JMA magnitude 7.3) obtained at three stations managed by NIED: K-NET Kumamoto (KMM), K-NET Uto (UTO), and KIK-NET Mashiki (MAS). Two horizontal components recorded at the ground surface (EW and NS components) were used. Details of the ground motion records are given in Supplementary Appendix S3. In the present study, the first 60 s of the as-recorded acceleration records were used for the NTHA. The calculated effective duration proposed by Trifunac and Brandy (1975) (
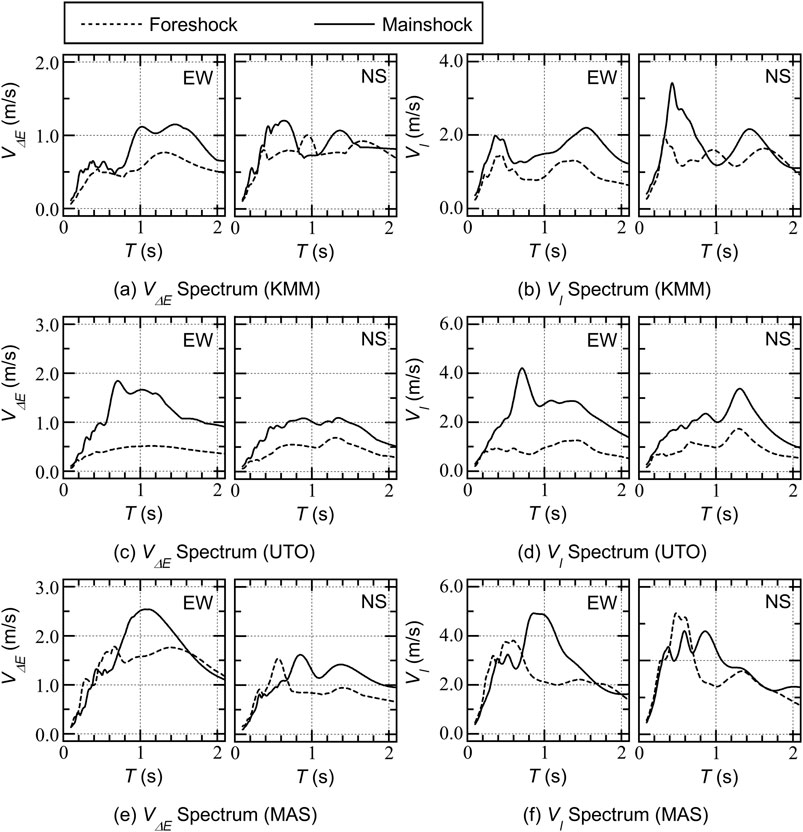
Figure 5. VΔE and VI spectrum of ground motion set (complex damping: 0.10). (a) VΔE spectrum (KMM). (b) VI spectrum (KMM). (c) VΔE spectrum (UTO). (d) VI spectrum (UTO). (e) VΔE spectrum (MAS). (f) VI spectrum (MAS).
To obtain the “exact” seismic responses of the building models, NTHA using recorded ground motions prescribed in Section 3.2 was carried out; 24 cases of NTHAs were carried out for each model in this study. Here, the single acceleration of only the foreshock and that of only the mainshock are referred to as “Eq-F” and “Eq-M,” respectively. In addition, “Eq-FM” and “Eq-MF” are the sequential accelerations, with Eq-FM following the recorded order of first the foreshock and second the mainshock, and Eq-MF following the opposite sequence of first the mainshock and second the foreshock. A time interval of 30 s was set between the first and second accelerations. After NTHA was carried out, the time-history of the first modal response (the peak equivalent displacement
The details of the critical PMI analysis used in this study are described below. Two parameters of critical PMI analysis were considered. First, the numbers of the pseudo-impulsive lateral force of each MI (
In the numerical analysis, the time increment for both NTHA and critical PMI analysis (
Note that in the figures shown in Section 4, the results obtained from NTHA using recorded ground motions are referred to as “Earthquake,” whereas the results obtained from critical PMI analyses are referred to as “PMI4” and “PMI6.”
Predictions of the responses of models subjected to KMM-EW and MAS-EW are demonstrated here. The results of KMM-EW were chosen as examples because the intensity of its mainshock was close to the design earthquake spectrum considered in design of the building model used in this study, and the results of MAS-EW were chosen because its response was the largest of all ground motion sets analyzed in this study.
Figure 6 shows the evaluation of

Figure 6. Evaluation of 1Vp and 2Vp. (a) KMM-EW. (b). MAS-EW.
When the input ground motion set was KMM-EW, the following observations could be drawn.
• For the model with significant pinching in RC beams (
• For the model with no pinching in RC beams (
In addition, the following observations could be drawn when the input ground motion set was MAS-EW.
• For the model with significant pinching in RC beams (
• For the model with no pinching in RC beams (
Figure 7 shows the hysteresis loop obtained from the PMI analysis considering sequential input. The results of sequential input Eq-FM (foreshock–mainshock sequence) are shown. The red curve indicates the half cycle of structural response when the maximum momentary input energy occurred (
• The hysteresis loop obtained for the model with significant pinching in RC beams (
• In the case of Sequential-1 (shown in Figures 7a3, a4, b3, b4), the direction of the half cycle of structural response when
• In the results of PMI4 (shown in Figures 7a3, a5, b3, b5), the half cycle of structural response when
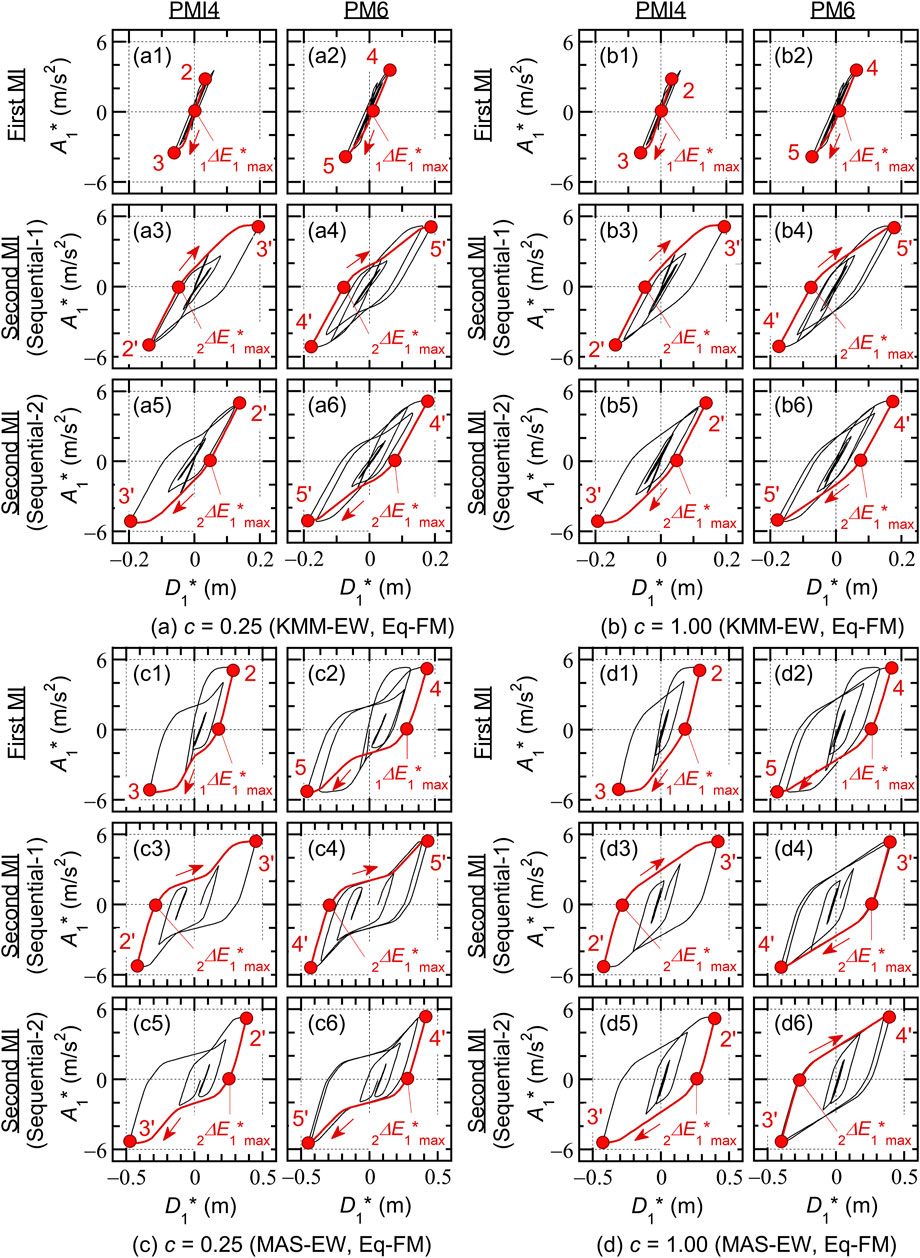
Figure 7. Hysteresis loop obtained from PMI analysis. (a) c = 0.25 (KMM-EW, Eq-FM). (b) c = 1.00 (KMM-EW, Eq-FM). (c) c = 0.25 (MAS-EW, Eq-FM). (d) c = 1.00 (MAS-EW, Eq-FM).
In addition, the following observations could be drawn when the input ground motion set was MAS-EW.
• The hysteresis loop obtained for the model
• In the results of PMI4 (shown in Figures 7c3, c5, d3, d5),
• For the model
Next, the predicted results using critical PMI analysis (PMI4 and PMI6, respectively) were compared with the NTHA results using recorded ground motions (Earthquake). Here, the results for input ground motion sets KMM-EW and MAS-EW are shown.
Figure 8 compares the cumulative energy per unit mass;
• In the case of Eq-F (foreshock only), the predicted results obtained from both PMI4 and PMI6 underestimated the results of “Earthquake.”
• In the case of Eq-M (mainshock only), the predicted results of PMI4 were close to the results of “Earthquake,” whereas the predicted results of PMI6 overestimated the results of “Earthquake.”
• In the cases of Eq-FM (foreshock–mainshock sequence) and Eq-MF (mainshock–foreshock sequence), the predicted results of PMI4 were close to the results of “Earthquake,” whereas the predicted results of PMI6 overestimated the results of “Earthquake.”
• The predicted results obtained from Sequence-1 were almost identical to those obtained from Sequential-2. The same observation could be made for both PMI4 and PMI6.
• The observations described above could be made for both models

Figure 8. Comparisons of cumulative energy. (a) c = 0.25 (KMM-EW). (b) c = 1.00 (KMM-EW). (c) c = 0.25 (MAS-EW). (d) c = 1.00 (MAS-EW).
In addition, the following conclusions could be drawn when the input ground motion set was MAS-EW (shown in Figures 8c, d). Similar to KMM-EW, the same observation described below could be made for both models
• In the case of Eq-F, the predicted results obtained from both PMI4 and PMI6 were larger than the results of “Earthquake.” The predicted results of PMI6 were too conservative compared with the results of “Earthquake”
• In the case of Eq-M, the predicted results of PMI4 underestimated the results of “Earthquake,” whereas the predicted results obtained from PMI6 overestimated the results of “Earthquake.”
• In the cases of Eq-FM and Eq-MF, the predicted results of PMI4 were close to the results of “Earthquake,” whereas the predicted results of PMI6 overestimated the results of “Earthquake.”
Next, the predicted local responses were compared as follows. The maximum story drift (
In Equation 38,
Figure 9 compares the local responses when the input ground motion set was KMM-EW. The following conclusions could be made.
• The predicted
• In the case of Eq-F, the
• The difference between the predicted results from Sequence-1 and 2 was negligibly small for both PMI4 and PMI6.
• The observations described above can be made for both models
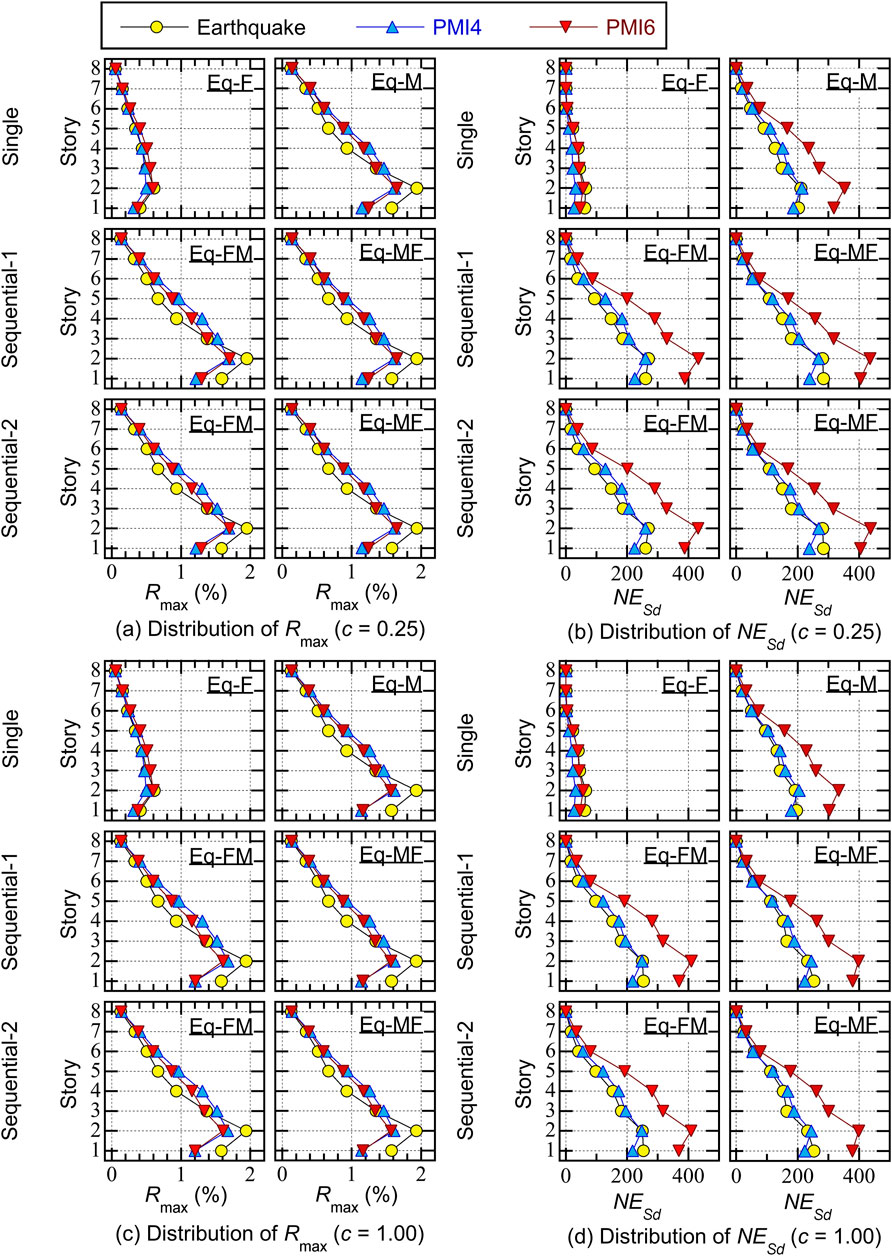
Figure 9. Comparisons of local response (KMM-EW). (a) Distribution
Figure 10 compares the local responses when the input ground motion set was MAS-EW. The following conclusions could be made. Similar to KMM-EW, the same observation described below could be made for both models
• In the case of Eq-F, the predicted
• In the case of Eq-F, the predicted
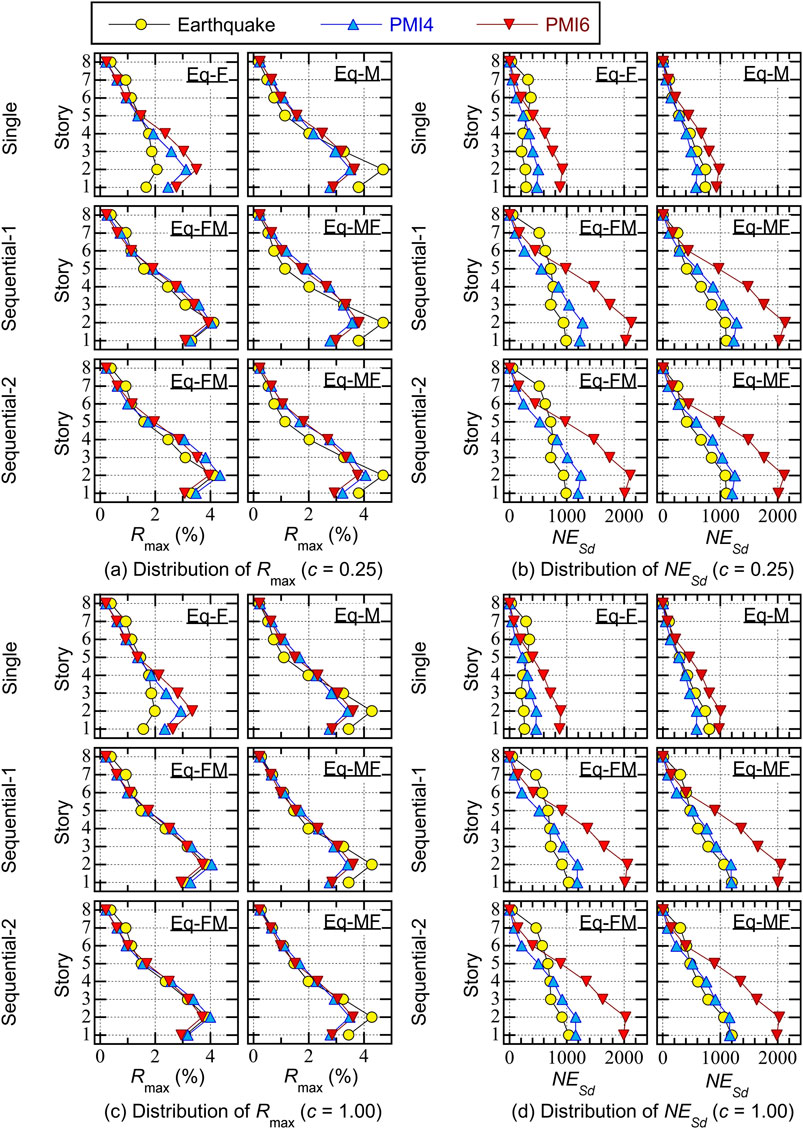
Figure 10. Comparisons of local response (MAS-EW). (a) Distribution
Overall, the difference of the predicted
In this subsection, the accuracy of the predicted results obtained from critical PMI analysis is examined, using all analysis results. In the following discussions, the ratio
Figure 11 shows the accuracy of the predicted peak response of the first modal response, the equivalent velocity of the maximum momentary input energy (
• The accuracy of the predicted
• The accuracy of the predicted
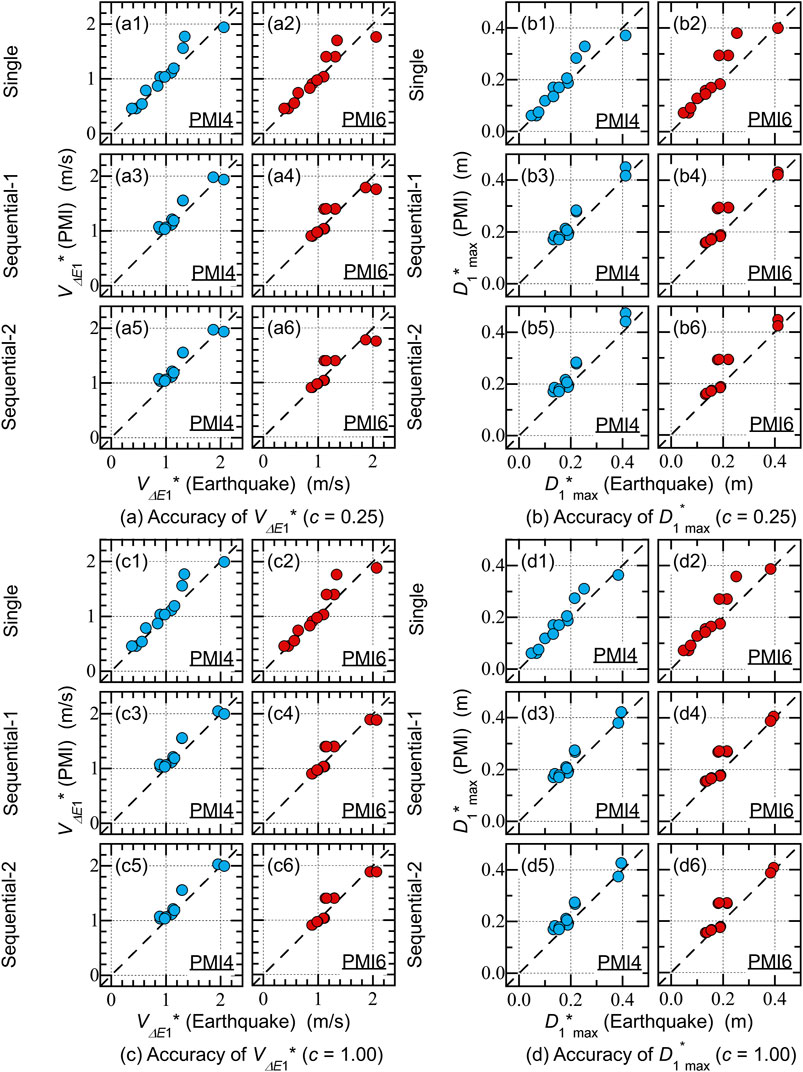
Figure 11. Accuracy of the predicted VΔE1* and D1*max using critical PMI analysis. (a) Accuracy of VΔE1* (c = 0.25). (b) Accuracy of
In addition, the following observations could be drawn for the model with no pinching in RC beams (
• The accuracy of the predicted
• The accuracy of the predicted
Therefore, the accuracy of the predicted
Figure 12 shows the accuracy of the predicted cumulative strain energy per unit mass of RC members (
• The predicted
• The predicted

Figure 12. Accuracy of the predicted cumulative strain energy using critical PMI analysis. (a) Accuracy of
In addition, the following observations could be drawn for the model
• The predicted
• The predicted
Overall, the predicted
Figure 13 shows the accuracy of the predicted local response (
• The accuracy of the predicted
• The predicted
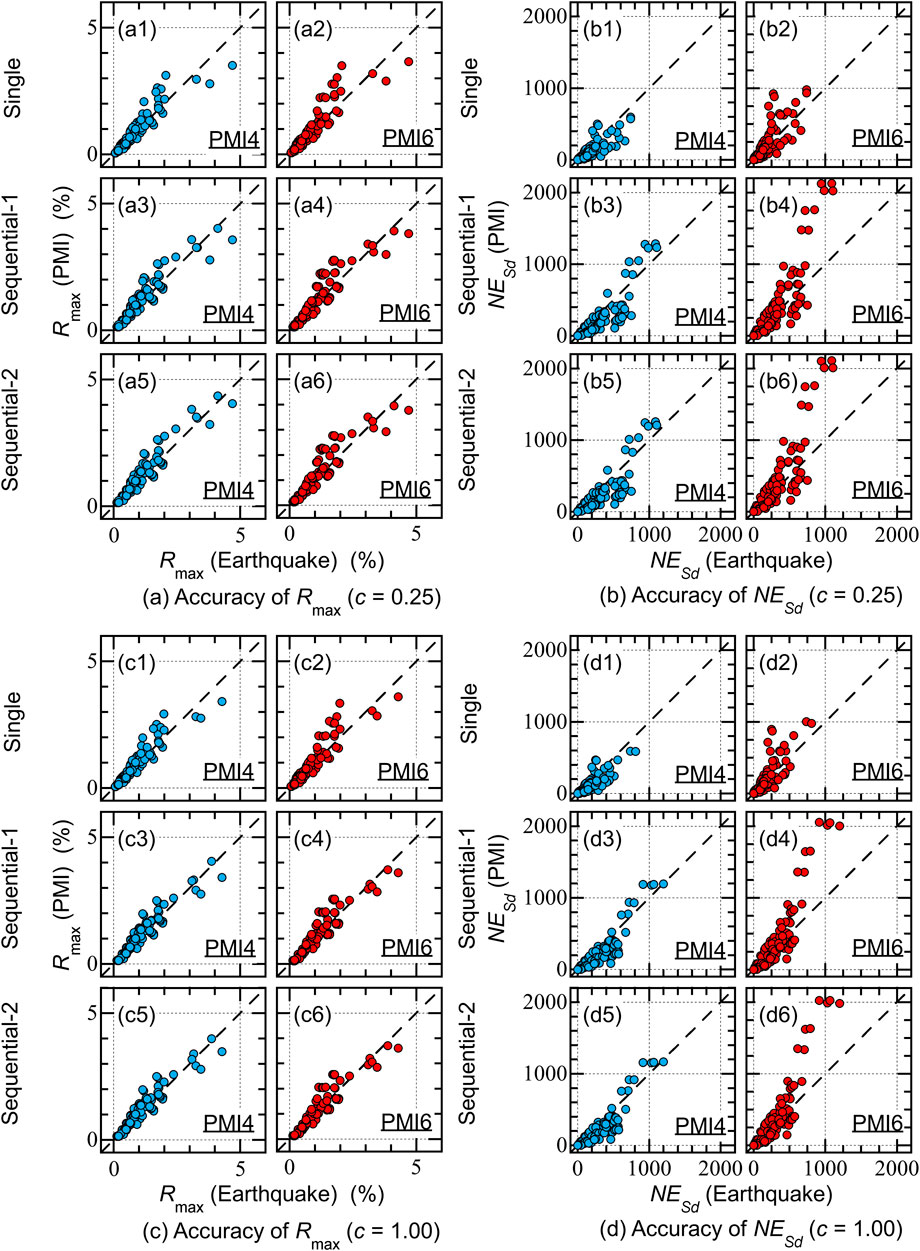
Figure 13. Accuracy of the predicted local responses critical PMI analysis. (a) Accuracy of
The analysis results can be summarized as follows.
• The peak response of the first modal response (
• In contrast, the accuracy of the predicted cumulative response (
• The trend of the accuracy of
• The influence of the sign of the two MIs on the predicted peak and cumulative responses of RC MRF with SDCs from the extended critical PMI analysis was negligibly small. The predicted results obtained from Sequence-1 were almost identical to those obtained from Sequential-2.
This section focuses on the influence of the number of pseudo-impulsive lateral forces in the first and second MIs (
First, those response quantities were compared in the case of single input. Figure 14 shows the
• The
• In contrast, most of the

Figure 14. VΔE1* - D1*max and VΔE1* - VI1* relationship. (a) c = 0.25. (b) c = 1.00.
Next, the ratio of the equivalent velocities (
• In the case of single input, most
• Similarly, in the case of sequential input (both Sequential-1 and 2), most
• According to the KMM-EW ground motion set discussed in Section 4.2, the
• According to the MAS-EW ground motion set discussed in Section 4.2, the
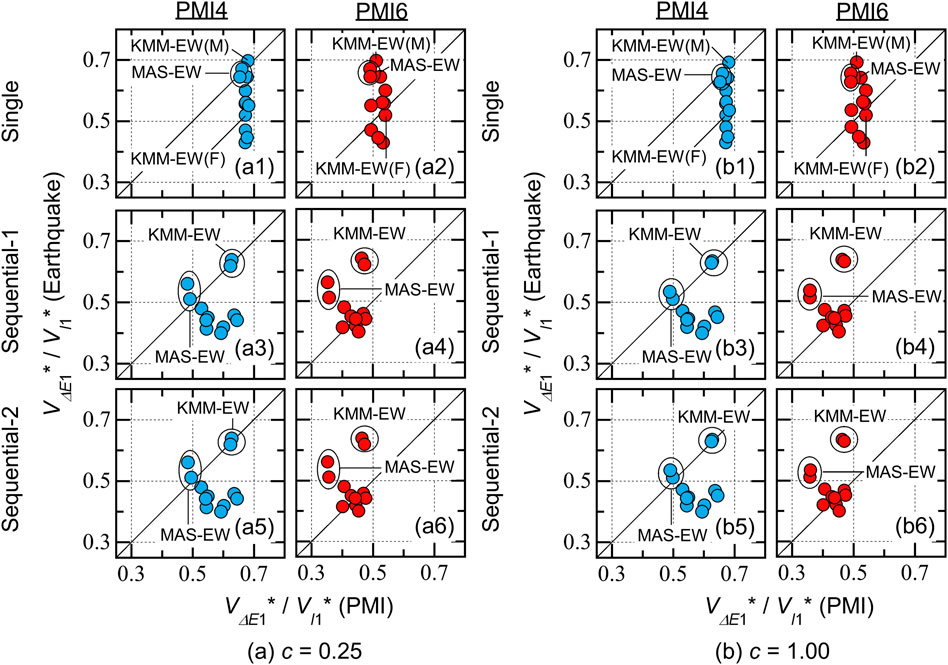
Figure 15. Relationship between the (VΔE1*/VI1*) ratio obtained using recorded ground motions and that obtained from critical PMI analysis. (a) c = 0.25. (b) c = 1.00.
The conclusions described above explain why the predicted
In this article, extended critical PMI analysis considering sequential input is proposed. The peak and cumulative responses of an eight-story RC MRF with SDCs subjected to the earthquake sequence recorded in the 2016 Kumamoto Earthquake were predicted using extended critical PMI analysis. The main results and conclusions can be summarized as follows.
(i) The peak response of the first modal response (the equivalent velocity of the maximum momentary input energy
(ii) The pulse velocities of the first and second MIs (
(iii) The dependence of the number of pseudo-impulsive lateral forces of each MI (
(iv) The predicted normalized cumulative strain energy of SDCs (
(v) For better prediction of the cumulative strain energy (e.g.,
(vi) The influence of the signs of two MIs on the predicted peak and cumulative responses of the RC MRF with SDCs based on the extended critical PMI analysis was negligibly small.
(vii) As far as the RC MRF with SDCs is concerned, the influence of the pinching behavior of RC beams on the behavior of the whole structure was negligibly small. Therefore, the negative effect of the pinching behavior of RC beams can be reduced by installing SDCs.
Conclusions (i) to (iii) answer question (I) in Section 1.2, whereas conclusions (iv) and (v) answer question (II). In addition, conclusion (vi) is the answer to question (III).
The significance of this study is that the nonlinear response of the RC MRF with SDCs subjected to an earthquake sequence studied herein, can be reproduced by the proposed extended critical PMI analysis. Note that thus far, the results of this study are valid only for RC MRF models with SDCs. However, these results imply that the behavior of structures with various hysteresis behaviors (e.g., stiffness and/or strength degradation owing to deformation amplitude, pinching, cyclic stiffness, and/or strength degradation) under earthquake sequences can be examined via the proposed extended critical PMI analysis. A strong point of critical PMI analysis is that it has no limitations, as far as the first modal response of the building is the main interest; critical PMI analysis of a structural model can be performed if the structural model is stable for NTHA. The P-delta effect may be considered in this critical PMI analysis, as long as the model is stable for NTHA. Therefore, extended PMI analysis may be applied to the analysis of a low-rise and mid-rise frame structure with brittle members (e.g., an RC MRF with an RC shear wall or infilled masonry wall), an MRF with a different type of dampers (e.g., oil, viscous, or viscoelastic dampers), or even base-isolated structures. According to the influence of higher modes, the Akehashi and Takewaki (2022a) had already discussed this issue: they demonstrated that the contribution of the second modal response can be included in the PMI analysis by considering the combination of the first and second mode vector. Therefore, the author also thinks the extended critical PMI analysis can be upgraded for high-rise building structures.
Note again that these results may only be valid for RC MRF models with SDCs. Therefore, without further verification using additional building models, the following questions remain unanswered. This list is not comprehensive.
• The strength balance of the RC MRF and SDCs is a point of interest for seismic design. How will the behavior of such an RC MRF with SDCs under earthquake sequences change as the strength balance of the RC MRF and SDCs changes? When the strength of the SDCs is relatively small, the behavior of the whole structure will be similar to that of the bare RC MRF. In such cases, the following concerns arise. (a) The influence of pinching behavior on the response of the RC MRF structure under an earthquake sequence will be significant, and (b) the degradation of the RC MRF will be accelerated in the case of an earthquake sequence. In contrast, when the strength of the SDCs is relatively large, the residual deformation after seismic events may become larger. This may affect the response of the RC MRF under earthquake sequences.
• Can the simplified procedure in a previous study (Fujii and Shioda, 2023) be extended for the case of earthquake sequences? Because the proposed simplified procedure is based on nonlinear static (pushover) analysis, it is much easier to apply this procedure in daily design work. For this purpose, it is necessary to evaluate the
• How to apply the presented critical PMI analysis to the case the strong two aftershocks follow the mainshock, or the foreshock-mainshock-aftershock case? The author thinks the most simplest solution may be that the seismic input is modeled as three and more parts of MIs, by adding the third term representing the third MI in Equation 1. However, the computation time demand would be increasing drastically in such case. The largest total analysis step of the extended critical PMI analysis shown herein was about 80,000: in this case, more than 72,000 steps are needed for the interval and free vibration after the second MI. Therefore, the author thinks some reductions are needed. For the case the strong two aftershocks follow the mainshock, the computation time demand can be reduced if the series of strong aftershocks could be combined into the single MI, by adjusting the number of pseudo-impulsive lateral forces.
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
KF: Conceptualization, Data curation, Formal Analysis, Investigation, Methodology, Software, Validation, Visualization, Writing–original draft, Writing–review and editing.
The author(s) declare that financial support was received for the research and/or publication of this article. This study received financial support from JSPS KAKENHI Grant Number JP23K04106.
I thank Sara J. Mason, MSc, ELS, from Edanz (https://jp.edanz.com/ac) for editing a draft of this manuscript.
The author declares that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The author(s) declare that no Generative AI was used in the creation of this manuscript.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fbuil.2025.1561534/full#supplementary-material
DI, double impulse; ICPMIA, incremental critical pseudo-multi impulse analysis; MDOF, multi-degree-of-freedom; MI, multi impulse; MRF, moment-resisting frame; NTHA, nonlinear time-history analysis; PDI, pseudo-double impulse; PMI, pseudo-multi impulse; RC, reinforced concrete; SDC, steel damper column; SDOF, single-degree-of-freedom; TVF, time-varying function.
Abdelnaby, A. E. (2016). Fragility curves for RC frames subjected to Tohoku mainshock-aftershocks sequences. J. Earthq. Eng. 22 (5), 902–920. doi:10.1080/13632469.2016.1264328
Abdelnaby, A. E., and Elnashai, A. S. (2014). Performance of degrading reinforced concrete frame systems under the Tohoku and Christchurch earthquake sequences. J. Earthq. Eng. 18, 1009–1036. doi:10.1080/13632469.2014.923796
Abdelnaby, A. E., and Elnashai, A. S. (2015). Numerical modeling and analysis of RC frames subjected to multiple earthquakes. Earthquakes Struct. 9 (5), 957–981. doi:10.12989/eas.2015.9.5.957
Akehashi, H., and Takewaki, I. (2021). Pseudo-double impulse for simulating critical response of elastic-plastic MDOF model under near-fault earthquake ground motion. Soil Dyn. Earthq. Eng. 150, 106887. doi:10.1016/j.soildyn.2021.106887
Akehashi, H., and Takewaki, I. (2022a). Pseudo-multi impulse for simulating critical response of elastic-plastic high-rise buildings under long-duration, long-period ground motion. Struct. Des. Tall Special Build. 31 (14), e1969. doi:10.1002/tal.1969
Akehashi, H., and Takewaki, I. (2022b). Bounding of earthquake response via critical double impulse for efficient optimal design of viscous dampers for elastic-plastic moment frames. Jpn. Archit. Rev. 5 (2), 131–149. doi:10.1002/2475-8876.12262
Akiyama, H. (1985). Earthquake resistant limit-state design for buildings. Tokyo: University of Tokyo Press.
Akiyama, H. (1999). Earthquake-resistant design method for buildings based on energy balance. Tokyo: Gihodo Shuppan.
Alıcı, F. S., and Sucuoğlu, H. (2024). “Input energy from mainshock-aftershock sequence during february 6, 2023 earthquakes in south east Türkiye,” in Proceedings of the 18th world conference on earthquake engineering (Milan, Italy).
Amadio, C., Fragiacomo, M., and Rajgelj, S. (2003). The effects of repeated earthquake ground motions on the non-linear response of SDOF systems. Earthq. Eng. Struct. Dyn. 32, 291–308. doi:10.1002/eqe.225
Amiri, S., Di Sarno, L., and Garakaninezhad, A. (2021). On the aftershock polarity to assess residual displacement demands. Soil Dyn. Earthq. Eng. 150, 106932. doi:10.1016/j.soildyn.2021.106932
Building Center of Japan (BCJ) (2016). The building standard law of Japan on CD-ROM. Tokyo: The Building Center of Japan.
Di Sarno, L. (2013). Effects of multiple earthquakes on inelastic structural response. Eng. Struct. 56, 673–681. doi:10.1016/j.engstruct.2013.05.041
Di Sarno, L., and Amiri, S. (2019). Period elongation of deteriorating structures under mainshock-aftershock sequences. Eng. Struct. 196, 109341. doi:10.1016/j.engstruct.2019.109341
Di Sarno, L., Amiri, S., and Garakaninezhad, A. (2020). Effects of incident angles of earthquake sequences on seismic demands of structures. Structures 28, 1244–1251. doi:10.1016/j.istruc.2020.09.064
Di Sarno, L., and Pugliese, F. (2021). Effects of mainshock-aftershock sequences on fragility analysis of RC buildings with ageing. Eng. Struct. 232, 111837. doi:10.1016/j.engstruct.2020.111837
Di Sarno, L., and Wu, J. R. (2021). Fragility assessment of existing low-rise steel moment-resisting frames with masonry infills under mainshock-aftershock earthquake sequences. Bull. Earthq. Eng. 19, 2483–2504. doi:10.1007/s10518-021-01080-6
Donaire-Ávila, J., Galé-Lamuela, D., Benavent-Climent, A., and Mollaioli, F. (2024). “Cumulative damage in buildings designed with energy and force methods under sequences of earthquakes,” in Proceedings of the 18th world conference on earthquake engineering (Milan, Italy).
El-Bahy, A., Kunnath, S. K., Stone, W. C., and Taylor, A. W. (1999). Cumulative seismic damage of circular bridge columns: benchmark and low-cycle fatigue tests. ACI Structural 96 (4), 633–641.
Elenas, A., Siouris, I. M., and Plexidas, A. (2017). “A study on the interrelation of seismic intensity parameters and damage indices of structures under mainshock-aftershock seismic sequences,” in Proceedings of the 16th world conference on earthquake engineering (Santiago, Chile).
Elwood, K. J., Sarrafzadeh, M., Pujol, S., Liel, A., Murray, P., Shah, P., et al. (2021). “Impact of prior shaking on earthquake response and repair requirements for structures—studies from ATC-145,” in Proceedings of the NZSEE 2021 annual conference (Christchurch, New Zealand).
Faisal, A., Majid, T. A., and Hatzigeorgiou, G. D. (2013). Investigation of story ductility demands of inelastic concrete frames subjected to repeated earthquakes. Soil Dyn. Earthq. Eng. 44, 42–53. doi:10.1016/j.soildyn.2012.08.012
Fajfar, P. (2000). A nonlinear analysis method for performance-based seismic design. Earthq. Spectra 16 (3), 573–592. doi:10.1193/1.1586128
Fujii, K. (2022). Peak and cumulative response of reinforced concrete frames with steel damper columns under seismic sequences. Buildings 12, 275. doi:10.3390/buildings12030275
Fujii, K. (2023). Energy-based response prediction of reinforced concrete buildings with steel damper columns under pulse-like ground motions. Front. Built Environ. 9, 1219740. doi:10.3389/fbuil.2023.1219740
Fujii, K. (2024a). Critical pseudo-double impulse analysis evaluating seismic energy input to reinforced concrete buildings with steel damper columns. Front. Built Environ. 10, 1369589. doi:10.3389/fbuil.2024.1369589
Fujii, K. (2024b). Seismic capacity evaluation of reinforced concrete moment-resisting frames with steel damper columns using incremental critical pseudo-multi impulse analysis. Front. Built Environ. 10, 1431000. doi:10.3389/fbuil.2024.1431000
Fujii, K., Kanno, H., and Nishida, T. (2021). Formulation of the time-varying function of momentary energy input to a single-degree-of-freedom system using fourier series. J. Jpn. Assoc. Earthq. Eng. 21 (3), 28–33. doi:10.5610/jaee.21.3_28
Fujii, K., and Kato, M. (2021). Strength balance of steel damper columns and surrounding beams in reinforced concrete frames. Earthquake Resistant Engineering Structures XIII. WIT Trans. Built Environ. 202, PII25–PII36.
Fujii, K., and Shioda, M. (2023). Energy-based prediction of the peak and cumulative response of a reinforced concrete building with steel damper columns. Buildings 13, 401. doi:10.3390/buildings13020401
Gentile, R., and Galasso, C. (2021). Hysteretic energy-based state-dependent fragility for ground-motion sequences. Earthq. Eng. Struct. Dyn. 50, 1187–1203. doi:10.1002/eqe.3387
Goda, K. (2012a). “Peak ductility demand of mainshock-aftershock sequences for Japanese earthquakes,” in Proceedings of the 15th world conference on earthquake engineering (Lisbon, Portugal).
Goda, K. (2012b). Nonlinear response potential of mainshock–aftershock sequences from Japanese earthquakes. Bull. Seismol. Soc. Am. 102 (5), 2139–2156. doi:10.1785/0120110329
Goda, K. (2014). Record selection for aftershock incremental dynamic analysis. Earthq. Eng. Struct. Dyn. 44 (2), 1157–1162. doi:10.1002/eqe.2513
Goda, K., Wenzel, F., and De Risi, R. (2015). Empirical assessment of non-linear seismic demand of mainshock–aftershock ground-motion sequences for Japanese earthquakes. Front. Built Environ. 1, 6. doi:10.3389/fbuil.2015.00006
Han, R., Li, Y., and Lindt, J. (2017). Probabilistic assessment and cost-benefit analysis of nonductile reinforced concrete buildings retrofitted with base isolation: considering mainshock–aftershock hazards. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 3 (4), 04017023. doi:10.1061/ajrua6.0000928
Hatzigeorgiou, G. D. (2010a). Behavior factors for nonlinear structures subjected to multiple near-fault earthquakes. Comput. Struct. 88, 309–321. doi:10.1016/j.compstruc.2009.11.006
Hatzigeorgiou, G. D. (2010b). Ductility demand spectra for multiple near-and far-fault earthquakes. Soil Dyn. Earthq. Eng. 30, 170–183. doi:10.1016/j.soildyn.2009.10.003
Hatzigeorgiou, G. D., and Beskos, D. E. (2009). Inelastic displacement ratios for SDOF structures subjected to repeated earthquakes. Eng. Struct. 31, 2744–2755. doi:10.1016/j.engstruct.2009.07.002
Hatzigeorgiou, G. D., and Liolios, A. A. (2010). Nonlinear behaviour of RC frames under repeated strong ground motions. Soil Dyn. Earthq. Eng. 30, 1010–1025. doi:10.1016/j.soildyn.2010.04.013
Hatzivassiliou, M., and Hatzigeorgiou, G. D. (2015). Seismic sequence effects on three-dimensional reinforced concrete buildings. Soil Dyn. Earthq. Eng. 72, 77–88. doi:10.1016/j.soildyn.2015.02.005
Hori, N., and Inoue, N. (2002). Damaging properties of ground motions and prediction of maximum response of structures based on momentary energy response. Earthq. Eng. Struct. Dyn. 31, 1657–1679. doi:10.1002/eqe.183
Hosseinpour, F., and Abdelnaby, A. E. (2017). Effect of different aspects of multiple earthquakes on the nonlinear behavior of RC structures. Soil Dyn. Earthq. Eng. 92, 706–725. doi:10.1016/j.soildyn.2016.11.006
Hoveidae, N., and Radpour, S. (2021). Performance evaluation of buckling-restrained braced frames under repeated earthquakes. Bull. Earthq. Eng. 19, 241–262. doi:10.1007/s10518-020-00983-0
Kagermanov, A., and Gee, R. (2019). Cyclic pushover method for seismic assessment under multiple earthquakes. Earthq. Spectra 35 (4), 1541–1558. doi:10.1193/010518eqs001m
Katayama, T., Ito, S., Kamura, H., Ueki, T., and Okamoto, H. (2000). “Experimental study on hysteretic damper with low yield strength steel under dynamic loading,” in Proceedings of the 12th world conference on earthquake engineering (Auckland, New Zealand).
Kojima, K., and Takewaki, I. (2015a). Critical earthquake response of elastic–plastic structures under near-fault ground motions (Part 1: fling-step input). Front. Built Environ. 1, 12. doi:10.3389/fbuil.2015.00012
Kojima, K., and Takewaki, I. (2015b). Critical earthquake response of elastic–plastic structures under near-fault ground motions (Part 2: forward-directivity input). Front. Built Environ. 1, 13. doi:10.3389/fbuil.2015.00013
Kojima, K., and Takewaki, I. (2015c). Critical input and response of elastic–plastic structures under long-duration earthquake ground motions. Front. Built Environ. 1, 15. doi:10.3389/fbuil.2015.00015
Mahin, A. (1980). “Effect of duration and aftershock on inelastic design earthquakes,” in Proceedings of the 9th world conference on earthquake engineering (Turkey: Istanbul).
Marder, K. J. (2018). Post-earthquake residual capacity of reinforced concrete plastic hinges. New Zealand: The University of Auckland. Ph.D thesis.
Miyake, T. (2006). A study of the relationship between maximum response and cumulative response for seismic design. J. Struct. Constr. Eng. Trans. AIJ. 599, 135–142.
Mukoyama, R., Fujii, K., Irie, C., Tobari, R., Yoshinaga, M., and Miyagawa, K. (2021). “Displacement-controlled seismic design method of reinforced concrete frame with steel damper column,” in Proceedings of the 17th world conference on earthquake engineering (Japan: Sendai).
Muto, K., Hisada, T., Tsugawa, T., and Bessho, S. (1974). “Earthquake resistant design of a 20 story reinforced concrete buildings,” in Proceedings of the fifth world conference on earthquake engineering (Rome, Italy).
Ono, Y., and Kaneko, H. (2001). “Constitutive rules of the steel damper and source code for the analysis program,” in Proceedings of the passive control symposium 2001 (Yokohama, Japan).
Orlacchio, M., Baltzopoulos, G., and Iervolino, I. (2021). “State-dependent seismic fragility via pushover analysis,” in Proceedings of the 17th world conference on earthquake engineering (Japan: Sendai).
Otani, S. (1981). Hysteresis models of reinforced concrete for earthquake response analysis. J. Fac. Eng. Univ. Tokyo 36 (2), 125–156.
Oyguc, R., Tonuk, G., Oyguc, E., and Ucak, D. (2023). Damage accumulation modelling of two reinforced concrete buildings under seismic sequences. Bull. Earthq. Eng. 21, 4993–5015. doi:10.1007/s10518-023-01729-4
Oyguc, R., Toros, C., and Abdelnaby, A. E. (2018). Seismic behavior of irregular reinforced-concrete structures under multiple earthquake excitations. Soil Dyn. Earthq. Eng. 104, 15–32. doi:10.1016/j.soildyn.2017.10.002
Pedone, L., Gentile, R., Galasso, C., and Pampanin, S. (2023). Energy-based procedures for seismic fragility analysis of mainshock-damaged buildings. Front. Built Environ. 9, 1183699. doi:10.3389/fbuil.2023.1183699
Qiao, Y. M., Lu, D. G., and Yu, X. H. (2020). Shaking table tests of a reinforced concrete frame subjected to mainshock-aftershock sequences. J. Earthq. Eng. 26 (4), 1693–1722. doi:10.1080/13632469.2020.1733710
Ruiz-García, J. (2012a). Mainshock-aftershock ground motion features and their influence in building's seismic response. J. Earthq. Eng. 16 (5), 719–737. doi:10.1080/13632469.2012.663154
Ruiz-García, J. (2012b). “Issues on the response of existing buildings under mainshock-aftershock seismic sequences,” in Proceedings of the 15th world conference on earthquake engineering (Lisbon, Portugal).
Ruiz-García, J. (2013). “Three-dimensional building response under seismic sequences,” in Proceedings of the 2013 world congress on advances in structural engineering and mechanics (ASEM13) (South Korea: JEJU).
Ruiz-García, J., Marín, M. V., and Terán-Gilmore, A. (2013). “Effect of seismic sequences on the response of RC buildings located in soft soil sites,” in Proceedings of the 2013 world congress on advances in structural engineering and mechanics (ASEM13) (South Korea: JEJU).
Ruiz-García, J., and Negrete-Manriquez, J. C. (2011). Evaluation of drift demands in existing steel frames under as-recorded far-field and near-fault mainshock–aftershock seismic sequences. Eng. Struct. 33, 621–634. doi:10.1016/j.engstruct.2010.11.021
Ruiz-García, J., and Olvera, R. N. (2021).“Seismic performance of nonconforming Mexican school buildings under mainshock-aftershock sequences,” in Proceedings of the 2021 world congress on advances in structural engineering and mechanics (ASEM21) (Seoul, South Korea).
Ruiz-García, J., Terán-Gilmore, A., and Díaz, G. (2012). “Response of essential facilities under narrow-band mainshock-aftershock seismic sequences,” in Proceedings of the 15th world conference on earthquake engineering (Lisbon, Portugal).
Ruiz-García, J., Yaghmaei-Sabegh, S., and Bojórquezc, E. (2018). Three-dimensional response of steel moment-resisting buildings under seismic sequences. Eng. Struct. 175, 399–414. doi:10.1016/j.engstruct.2018.08.050
Shirai, K., Okano, H., Nakanishi, Y., Takeuchi, T., Sasamoto, K., Sadamoto, M., et al. (2024). Evaluation of response, damage, and repair cost of reinforced concrete super high-rise buildings subjected to large-amplitude earthquakes. Jpn. Archit. Rev. 7, e12418. doi:10.1002/2475-8876.12418
Soureshjani, O. K., and Massumi, A. (2022). Seismic behavior of RC moment resisting structures with concrete shear wall under mainshock–aftershock seismic sequences. Bull. Earthq. Eng. 20, 1087–1114. doi:10.1007/s10518-021-01291-x
Tesfamariam, S., and Goda, K. (2017). Energy-based seismic risk evaluation of tall reinforced concrete building in vancouver, BC, Canada, under Mw9 megathrust subduction earthquakes and aftershocks. Front. Built Environ. 3, 29. doi:10.3389/fbuil.2017.00029
Tesfamariam, S., Goda, K., and Mondal, G. (2015). Seismic vulnerability of reinforced concrete frame with unreinforced masonry infill due to mainshock–aftershock earthquake sequences. Earthq. Spectra 31 (3), 1427–1449. doi:10.1193/042313eqs111m
Toyoda, S., Kuramoto, H., Katsumata, H., and Fukuyama, H. (2014). Earthquake response analysis of a 20-story RC building under long period seismic ground motion. J. Struct. Constr. Eng. Trans. AIJ 79 (702), 1167–1174. doi:10.3130/aijs.79.1167
Trifunac, M. D., and Brady, A. G. (1975). A study on the duration of strong earthquake ground motion. Bull. Seismol. Soc. Am. 65, 581–626.
Uang, C., and Bertero, V. V. (1990). Evaluation of seismic energy in structures. Earthq. Eng. Struct. Dyn. 19, 77–90. doi:10.1002/eqe.4290190108
Wada, A., Huang, Y., and Iwata, M. (2000). Passive damping technology for buildings in Japan. Prog. Struct. Eng. Mater. 2 (3), 335–350. doi:10.1002/1528-2716(200007/09)2:3<335::aid-pse40>3.0.co;2-a
Wen, W., Ji, D., and Zhai, C. (2020). Ground motion rotation for mainshock-aftershock sequences: necessary or not? Soil Dyn. Earthq. Eng. 130, 105976. doi:10.1016/j.soildyn.2019.105976
Xing, G., Ozbulut, O. E., Lei, T., and Liu, B. (2017). Cumulative seismic damage assessment of reinforced concrete columns through cyclic and pseudo-dynamic tests. Struct. Des. Tall Special Build. 26, e1308. doi:10.1002/tal.1308
Yaghmaei-Sabegh, S., and Mahdipour-Moghanni, R. (2019). State-dependent fragility curves using real and artificial earthquake sequences. Asian J. Civ. Eng. 20, 619–625. doi:10.1007/s42107-019-00132-2
Yaghmaei-Sabegh, S., and Ruiz-García, J. (2016). Nonlinear response analysis of SDOF systems subjected to doublet earthquake ground motions: a case study on 2012 Varzaghan–Ahar events. Eng. Struct. 110, 281–292. doi:10.1016/j.engstruct.2015.11.044
Yang, F., Wang, G., and Ding, Y. (2019). Damage demands evaluation of reinforced concrete frame structure subjected to near-fault seismic sequences. Nat. Hazards 97, 841–860. doi:10.1007/s11069-019-03678-1
Yang, F., Wang, G., and Li, M. (2021). Evaluation of the seismic retrofitting of mainshock-damaged reinforced concrete frame structure using steel braces with soft steel dampers. Appl. Sci. 11, 841. doi:10.3390/app11020841
Zhai, C., Ji, D., Wen, W., Lei, W., Xie, L., and Gong, M. (2016). The inelastic input energy spectra for main shock–aftershock sequences. Earthq. Spectra 32 (4), 2149–2166. doi:10.1193/121315eqs182m
Zhai, C., Wen, W., Li, S., Chen, Z., Chang, Z., and Xie, L. (2014). The damage investigation of inelastic SDOF structure under the mainshock–aftershock sequence-type ground motions. Soil Dyn. Earthq. Eng. 59, 30–41. doi:10.1016/j.soildyn.2014.01.003
Zhai, C., Wen, W., Li, S., Chen, Z., Li, S., and Xie, L. (2013). Damage spectra for the mainshock–aftershock sequence-type ground motions. Soil Dyn. Earthq. Eng. 45, 1–12. doi:10.1016/j.soildyn.2012.10.001
Keywords: reinforced concrete moment-resisting frame, steel damper column, earthquake sequences, incremental critical pseudo-multi impulse analysis, maximum momentary input energy, peak displacement, cumulative energy
Citation: Fujii K (2025) Seismic response of reinforced concrete moment-resisting frame with steel damper columns under earthquake sequences: evaluation using extended critical pseudo-multi impulse analysis. Front. Built Environ. 11:1561534. doi: 10.3389/fbuil.2025.1561534
Received: 16 January 2025; Accepted: 10 March 2025;
Published: 09 April 2025.
Edited by:
Amadeo Benavent-Climent, Polytechnic University of Madrid, SpainReviewed by:
Jesús Donaire-Ávila, University of Jaén, SpainCopyright © 2025 Fujii. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Kenji Fujii, a2VuamkuZnVqaWlAcC5jaGliYWtvdWRhaS5qcA==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.