 Gastón Fermandois
Gastón Fermandois Mariantonieta Gutiérrez Soto
Mariantonieta Gutiérrez Soto Wei Song
Wei Song Tao Wang
Tao Wang Shirley J. Dyke
Shirley J. Dyke- 1Departamento de Obras Civiles, Universidad Técnica Federico Santa María, Valparaíso, Chile
- 2School of Engineering Design and Innovation, Pennsylvania State University, University Park, PA, United States
- 3Department of Civil, Construction and Environmental Engineering, University of Alabama, Tuscaloosa, AL, United States
- 4Institute of Engineering Mechanics, China Earthquake Administration, Harbin, Heilongjiang, China
- 5Lyles School of Civil Engineering & School of Mechanical Engineering, Purdue University, West Lafayette, IN, United States
Editorial on the Research Topic
Experimental benchmark control problem on multi-axial real-time hybrid simulation
As structural engineering continues to evolve, the demand for cutting-edge experimental techniques closely mimicking real-world conditions is becoming more critical. Realistic testing methodologies are essential in ensuring the safety, reliability, and resilience of buildings and infrastructure, particularly when subjected to dynamic forces such as wind, seismic events, and other environmental loads. Traditional uniaxial testing approaches, though valuable, often fall short of replicating the intricacies of real-world loading conditions. Multi-axial dynamic testing, which simultaneously applies forces in multiple directions, provides a more comprehensive understanding of structural behavior. This methodology, coupled with real-time hybrid simulation (RTHS), which integrates physical experimentation with computational models, allows for a more holistic evaluation of structural responses to dynamic loads. However, despite significant progress, challenges remain in handling multi-dimensional problems, which require sophisticated control strategies to manage complex actuator interactions and nonlinearities. This Research Topic addresses these challenges by presenting a benchmark control problem for multi-axial RTHS (maRTHS), designed to test and validate advanced control strategies, particularly those employing multiple-input multiple-output (MIMO) systems.
The maRTHS benchmark problem (Condori Uribe et al.) offers a framework to assess and improve control techniques, enabling the research community to handle the intricate requirements of multi-dimensional testing better. This initiative fosters a deeper understanding of structural responses by encouraging the shift from single-actuator to multi-actuator experiments, paving the way for safer, more resilient designs. In particular, this benchmark is the second-generation problem in virtual RTHS. The scientific community received the first-generation RTHS benchmark (Silva et al., 2020), which provided a virtual testbed for researchers to validate complex control schemes and allowed for training and development purposes to build the necessary tools to conduct single-actuator RTHS tests. Following this successful approach, the second-generation maRTHS benchmark dramatically increases the virtual test’s sophistication by incorporating two actuators to command two degrees of freedom (displacement and rotation) at the interface between numerical and experimental substructures. The problem was designed and implemented in the laboratory at Purdue University, where the properties from the specimen and loading equipment were obtained for the relevant models included in the problem. A virtual representation of the maRTHS experiment was encapsulated and stored in a shared repository, providing researchers with the necessary tools to develop control algorithms and envision more sophistication in these experimental techniques to advance the discipline further.
Several authors contributed to this Research Topic in developing multi-actuator dynamic compensation for maRTHS tests (see Figure 1). Most contributions in this Research Topic are in adaptive compensation, which has proven to be an effective technique to compensate for errors in past single-actuator RTHS tests. The leading architecture encompassed in the developments of this Research Topic is associated with the decentralized approach for compensating individual actuators without directly accounting for cross-coupling between actuators. For example, Quiroz et al. developed a recursive least squares (RLS) adaptive compensator with robust parameter calibration. Aguila et al. propose the use of conditional adaptive time series (CATS) compensation with a combination of conventional proportional-integral-derivative (PID) feedback controller and model predictive control (MPC), considering coupled and decoupled configurations. Shangguan et al. propose an adaptive compensation method with a sliding mode controller (SMC). Xu et al. introduced data-driven compensation techniques using nonlinear autoregressive with external input (NARX) based compensation. On the other hand, Ruiz and Song developed an adaptive law for an inverse dynamics controller considering cross-coupling between actuators and the specimen through the extended and unscented Kalman filters (EKF and UKF, respectively). These techniques have been demonstrated to reduce synchronization errors between substructures and can reject measurement noises and unmodeled dynamics through the virtual benchmark.
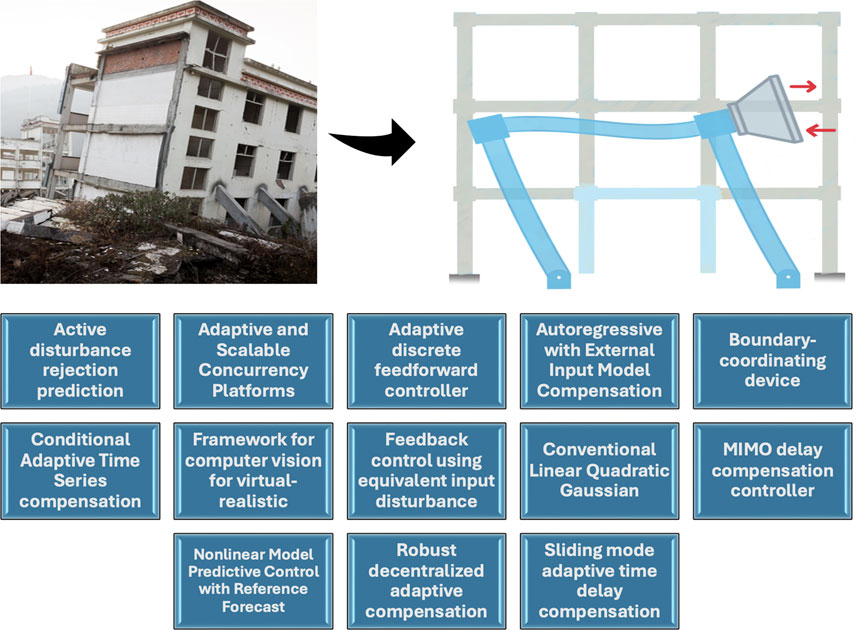
Figure 1. Compilation of methodologies implemented to solve multi-axial RTHS challenges.
Meanwhile, other authors have proposed innovative developments to improve the accuracy and capabilities of maRTHS. Saeger et al. considered a computer vision-based displacement tracking algorithm (Lucas-Kanade optical flow method) in a virtual reality environment to allow contactless feedback control in virtual maRTHS. Sudvarg et al. studied real-time scheduling for virtual maRTHS computations and proposed adaptive event handling for intensive simulations over larger computational models and complex control architectures. Tian et al. proposed another maRTHS problem inspired by this Research Topic’s benchmark, where a boundary-coordinating device (BDC) comprising double shaking tables in parallel configuration can enforce a shear–moment boundary condition over a physical substructure.
Finally, the collective contributions in this Research Topic mark a significant step forward in the design and control techniques essential for multi-actuator systems. Nonetheless, several challenges remain that future research must address to advance this experimental approach. First, understanding how the proposed compensation algorithms scale and generalize to higher degrees of multi-actuator loading, especially regarding computational complexity and real-time performance, is critical. Second, better insights into multi-actuator coupling in Cartesian coordinates are necessary to enable direct control of specimen boundary conditions, rather than indirect control through actuator coordinates. Third, integrating mixed-mode displacement-force testing is key to simulating more realistic and complex loading scenarios. By confronting these challenges, the continued progress in dynamic testing methodologies is expected to open avenues for more accurate simulation of real-world conditions and consider multiple natural hazards.
Author contributions
GF: Writing–original draft, Writing–review and editing. MGS: Writing–original draft, Writing–review and editing. WS: Writing–original draft, Writing–review and editing. TW: Writing–original draft, Writing–review and editing. SD: Writing–original draft, Writing–review and editing.
Funding
The author(s) declare that no financial support was received for the research, authorship, and/or publication of this article.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The author(s) declared that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Generative AI statement
The author(s) declare that no Generative AI was used in the creation of this manuscript.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Keywords: multi-axial real-time hybrid simulation (maRTHS), multi-actuator, control design, dynamic testing, adaptive compensation, structural dynamics, earthquake engineering
Citation: Fermandois G, Gutiérrez Soto M, Song W, Wang T and Dyke SJ (2024) Editorial: Experimental benchmark control problem on multi-axial real-time hybrid simulation. Front. Built Environ. 10:1540293. doi: 10.3389/fbuil.2024.1540293
Received: 05 December 2024; Accepted: 09 December 2024;
Published: 18 December 2024.
Edited and reviewed by:
Izuru Takewaki, Kyoto Arts and Crafts University, JapanCopyright © 2024 Fermandois, Gutiérrez Soto, Song, Wang and Dyke. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Gastón Fermandois, Z2FzdG9uLmZlcm1hbmRvaXNAdXNtLmNs