 Anita Ullrich1*
Anita Ullrich1* Franziska Hunger1
Franziska Hunger1 Ioanna Stavroulaki2
Ioanna Stavroulaki2 Adam Bilock3
Adam Bilock3 Klas Jareteg3
Klas Jareteg3 Yury Tarakanov4
Yury Tarakanov4 Alexander Gösta5,6
Alexander Gösta5,6 Johannes Quist1
Johannes Quist1 Meta Berghauser Pont2
Meta Berghauser Pont2 Fredrik Edelvik1
Fredrik Edelvik1- 1FCC, Fraunhofer-Chalmers Research Centre, Gothenburg, Sweden
- 2Division of Urban Design and Planning, Chalmers University, Gothenburg, Sweden
- 3Industrial Path Solutions AB, Gothenburg, Sweden
- 4Viscando AB, Gothenburg, Sweden
- 5Liljewall arkitekter, Gothenburg, Sweden
- 6RISE Research Institutes of Sweden AB, Stockholm, Sweden
Pedestrian movement has always been one of the main concerns for urban planning and design, but it has become more important within the sustainable development agenda, as walking is crucial to reducing urban emissions and fostering liveable cities. Therefore, urban planners need to take pedestrian movement into consideration as part of the workflow of planning and designing cities. This study outlines a comprehensive workflow tailored for urban planners. It proposes a hybrid model that integrates an agent-based model, which simulates the micro-scale movement of pedestrians in outdoor urban environments, with a network model, which predicts the aggregated pedestrian flows on a macro-scale. The hybrid model is applied to a pedestrian precinct in the city centre of Gothenburg, Sweden, and is compared to real-world measurements. The reasonable agreement between the simulation results and the real-world data supports the reliability of the proposed workflow, underscoring the model’s ability to statistically predict pedestrian movement on a large scale and individually on a local scale. Furthermore, the model enables the analysis of flow distributions and movement restrictions and facilitates the analysis of different design scenarios and specific pedestrian behaviour. This functionality is valuable for urban design and planning practice, contributing to the optimisation of pedestrian flow dynamics.
1 Introduction
Rapid urbanisation and climate change pose critical challenges for urban planners and architects who, using elaborated measurement techniques, high-fidelity simulation models, and artificial intelligence, aim for deep insights and understanding of the built environment and urban processes. In the light of climate change, walking has a crucial role in emission-free travelling and fostering liveable cities (Stratford et al., 2020; Litman, 2020). Furthermore, walking contributes to health and wellbeing (e.g., Roe et al., 2020; Bird et al., 2018), social co-presence, inclusion and cohesion (e.g., Legeby et al., 2015; Legeby, 2013), and the resilience of cities due to a reduced dependency on energy sources (Berghauser Pont et al., 2021). Moreover, pedestrian flows are recognised as an important driver of local markets and economies (e.g., Hillier et al., 1993; Hillier, 1996). It is thus clear that pedestrian movement is an urban process that must be understood in order to plan and design more sustainable and safer development paths for cities.
Pedestrian movement has been studied using different approaches and on different scales for many decades. As well as controlled experiments, where general behaviour can be studied in specific circumstances, field observation using pedestrian-sensing technology is widely used to collect real-world data. Video recording techniques with image recognition enable a well-resolved study of local phenomena. In addition, the availability of mobile phone signal data can be used to analyse pedestrian movement in large areas. Nevertheless, signal post-processing in conjunction with data anonymisation due to the general data protection regulation (GDPR) can lead to a coarse time resolution. The interested reader is referred to an exhaustive review by Dong et al. (2020).
However, these measurement techniques cannot be used to forecast pedestrian movement in planned or newly designed places. The same applies to geographical contexts where collecting data on pedestrians is prohibited due to local restrictions. Therefore, various models have been developed to simulate pedestrian movement, which are summarised as follows.
Various macroscopic modelling methods have been developed to simulate pedestrian flows on street networks. On the one hand, route-choice models based on a discrete-choice framework adapt traffic-modelling methodologies to simulate pedestrian trajectories from origin to destination on a street network (e.g., Basu and Sevtsuk, 2022; Sevtsuk et al., 2021; Bongiorno et al. 2021; Prato 2009). On the other hand, statistical models based on street network modelling predict aggregated pedestrian flows on a street level (i.e., number of pedestrians on each street segment for a given time-frame) (e.g., Bolin et al., 2021; Stavroulaki et al., 2019; Berghauser Pont et al., 2019a; Özbil et al., 2011; Dhanani and Vaughan, 2016; Özbil et al., 2015; Berghauser Pont and Marcus, 2015; Netto et al., 2012; Peponis et al., 2008; Hillier and Iida, 2005; Penn et al., 1998; Peponis et al., 1997; Hillier et al., 1993). Such models have mainly been developed within the field of urban morphology and Space Syntax (Stavroulaki, 2022; Sharmin and Kamruzzaman, 2018). While route-choice models have high accuracy, they are very data-demanding and rely on many predictors that cannot be estimated in the design phase of urban development planning (e.g., specific attractions, sidewalk width, street lighting, and exact land-use mix), or they include socioeconomic predictors that are not predefined in development plans (e.g., income and age). Statistical network-based models are more parsimonious. Although they have moderate accuracy, they can be applied more directly in scenario analysis and assessment to guide the early design and planning stages since they only rely on spatial predictors that can be affected by design, such as street centrality and urban density (Stavroulaki, 2022; Sharmin and Kamruzzaman, 2018). The macroscopic network model (NM) applied in this study is such a parsimonious statistical model, as will be described in detail in the methodology section.
Common microscopic modelling methods identified by Duives et al. (2013) for crowd and pedestrian movement are the cellular automata model studied by Blue et al. (1997), the social force model introduced by Helbing et al. (2000), the activity–choice model (Hoogendoorn and Bovy, 2004), and velocity-based models (Paris et al., 2007). Cellular automata models divide the walking space for pedestrians into a discrete grid. Pedestrians move through this grid based on constraints defined in the model. In contrast, the social force model represents pedestrians in a continuous space with force-based interactions and movements. The activity-choice model is a continuation of the social force model, adding an active route choice for pedestrians, whereas, in the velocity-based model, pedestrians choose their path based on a knowledge of surrounding obstacles to reach their destination as directly as possible. During the last decade, crowd movement simulations based on neuro-evolution have been studied by Song et al. (2018) and Wang et al. (2015). In this study, an agent-based model (ABM) based on the social force model is applied for the micro-scale simulations.
While pedestrian modelling is typically conducted at the micro- or macroscale, intermediate approaches also exist. Examples include the continuum model presented by Hoogendoorn et al. (2014), the mesoscopic model for pedestrian dynamics in two dimensions by Tordeux et al. (2018), and the mesoscopic queue models used by Crociani et al. (2016) and Lämmel et al. (2014).
Several attempts have been made to develop hybrid models. For example, Xiong et al. (2009) created a multi-resolution model that couples an ABM with a flow-based model. The flow-based model uses pedestrian velocities and densities from the ABM to efficiently simulate stabilised flow, while the ABM is guided by flow rates to simulate unstabilised flow. Kneidl et al. (2013) combined a graph-based macroscopic model with a cellular automata microscopic model, enhanced by a dynamic navigation field to control pedestrian movement. Crociani et al. (2016) developed a multi-scale model that integrates a cellular automata model with a mesoscopic queue model, where pedestrian movement is steered via a queueing process, improving performance in low-density areas. Likewise, Lämmel et al. (2014) introduced a hybrid model linking a queue model with an optimal reciprocal collision avoidance model. Other examples of hybrid models are ABMs developed within the field of space syntax where agents’ random walks depend on both visual parameters (i.e., angle and field of view) and the macroscopic configurational properties of the urban layout (Turner and Penn, 2002; Penn and Turner, 2002; Hanna, 2021). A similarly motivated approach was presented by Ma et al. (2023), where an ABM based on an origin–destination matrix included the visit frequencies of attractions and added walkability affordances of land cover in the model parameters (i.e., angle and depth of vision), resulting in a simulated pedestrian path system emerging from the collective interactions between the agents and environment in a bottom–up manner. While numerous hybrid models have been developed over past decades, macro-scale flow patterns in most models emerge bottom–up from the micro-scale movement; to our knowledge, none of the existing models incorporate the prediction of pedestrian volume. Therefore, this study proposes a workflow where the aggregated macro-scale pedestrian flow informs the micro-scale agents’ movement in a top–down manner, coupling a statistically based NM with a social-force ABM. This workflow aims to provide a comprehensive and self-contained tool that can be used in urban design and planning to estimate pedestrian movement flows in the streets and public spaces of planned areas to assist in scenario analysis and support decision-making.
Human behaviour is very complex, and factors that influence it include ethnic origin, age, events, social relations, fitness, and weather (Dridi, 2015; Kaup et al., 2008; Hansen, 2018). Thorough model validation is thus not straightforward. For agent-based pedestrian simulations, only a few attempts have been made to develop procedures on sensitivity analyses, calibration, validation, and comparison to real-world data, such as Davidich and Köster (2012), Zhou et al. (2015), and Sparnaaij et al. (2019). The reasons for the relatively small number of studies presenting comparisons to real-world data are mainly attributed to the need for more data and the complexity of pedestrian movement itself. However, several studies aim to establish an awareness of the importance of these steps, such as Duives et al. (2013), who derive a strategy to assess the model’s capability. As the models generally cannot capture all the different behaviours with one set of parameters, calibration can be performed with a single or several test cases relating to the scenario to be investigated. Examples are by performing manual calibration (Porter et al., 2018; Rudloff et al., 2013) or utilising a genetic algorithm and a threshold accepting algorithm (Voloshin et al., 2015; Davidich and Köster, 2012). Recently, a multi-objective calibration was suggested by Campanella et al. (2011) and applied by Sparnaaij et al. (2019) and Liberto et al. (2020). The studies cited in this paragraph mostly focus on crowd and emergency evacuations, and comparisons of the models were done with experimental settings. In the present study, however, we apply the same type of ABM as discussed in the literature above to daily movement in larger open spaces. Before doing so, the ABM applied in this study has been validated and calibrated as per Berghauser Pont et al. (2023).
ABMs typically rely on real-world statistical data for the initial agent distribution and their destinations; this is not available when designing new areas. These limitations hinder ABM’s usability for urban design and planning practice. In such cases, the necessary input to ABM could be retrieved from a macroscopic NM, resulting in a hybrid model.
The objective of this study is to use an NM and an ABM to provide a hybrid workflow (Figure 1) for predicting pedestrian movement seamlessly on large and small scales, specifically for urban designers and planners. This workflow is only based on spatial parameters that can be defined in the early design phases, such as building geometries, street networks, and metadata like retail and transit locations. In our proposed workflow, these data feed into an NM, which statistically predicts macro-scale aggregated pedestrian flows. These flow predictions, alongside architectural data, initialise an ABM for micro-scale simulations of pedestrian movement so that urban planners can leverage existing data in their planning process without further real-world data. Through the hybrid workflow presented here, the combined insights from both models can inform planners about daily patterns of pedestrian flows, crowdedness, pedestrian conflicts (e.g., violation of personal space), and movement restrictions, aiding design evaluation without additional data collection.
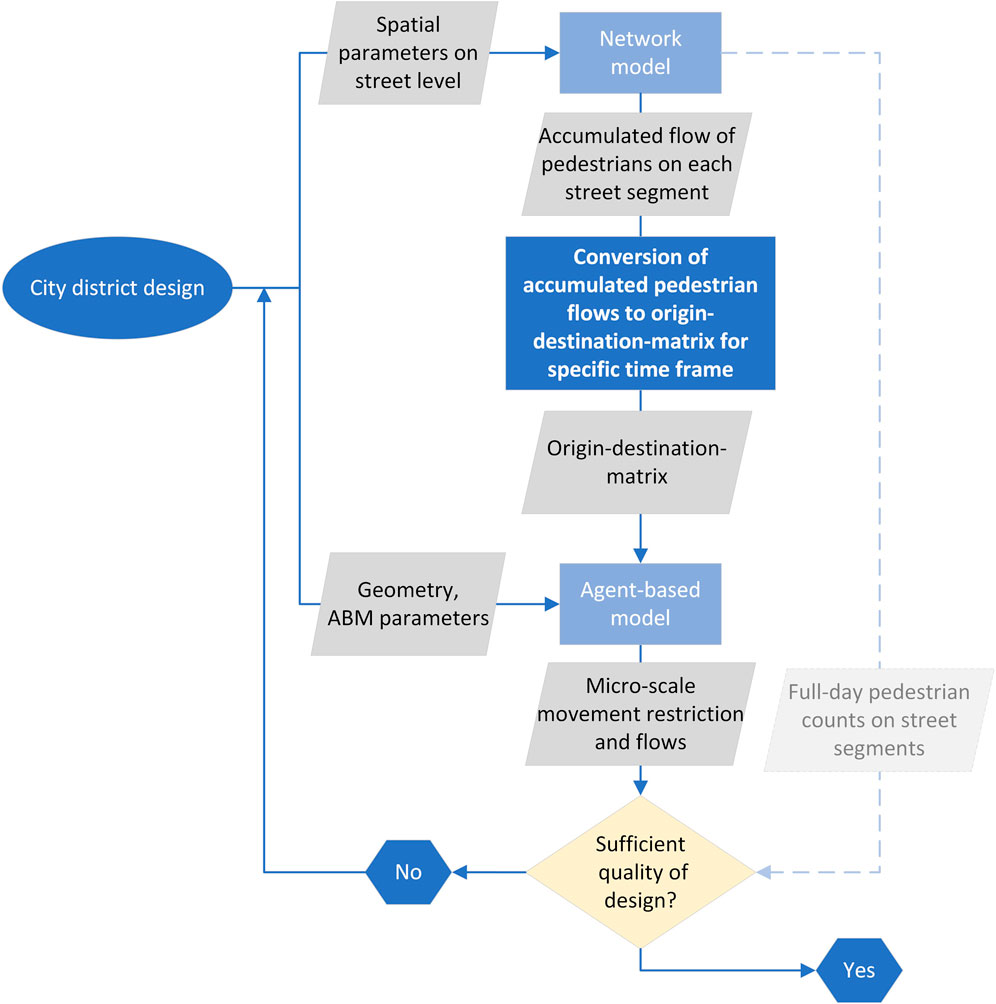
Figure 1. Proposed workflow based on a hybrid model connecting an NM and an ABM.
Finally, the reliability of the proposed workflow is evaluated in this study by comparison with real-world data of pedestrian movement in a pedestrian precinct via a case study.
2 Materials and methods
To exemplify the proposed workflow, two specific implementations of the NM and ABM are applied; these are variations of established models known from literature, the modelling details of which are described in Berghauser Pont et al. (2023). In the following section, we summarise the models and emphasise how they are connected to enable a seamless study of pedestrian movement on different scales.
Thereafter, the material for a case study of a real-world pedestrian precinct is presented, followed by the specific model setup for the hybrid workflow for the simulation of pedestrian movement in this precinct.
2.1 Numerical method
2.1.1 Network model
The NM used in the hybrid model presented in this paper was developed during the Crowd Movement research project and is fully presented in Berghauser Pont et al. (2023).
It is based on a machine learning model in Python1 using least absolute shrinkage and selection operator (LASSO)2 regression that predicts pedestrian flows (i.e., numbers of pedestrians in a day) on the streets of urban areas, both existing and planned. LASSO was selected because it is a regression analysis method that performs both variable selection and regularisation in order to enhance the prediction accuracy and interpretability of the resulting statistical model (Stavroulaki et al., 2024). Compared to other methods (e.g., ridge regression, elastic net, and stepwise regression), LASSO is typically preferred when the aim is, first, to arrive at a simple, parsimonious, and easily interpretable model with a few sets of predictors, and second, to avoid overfitting to the training data so that it will better generalise to new unobserved data of new areas and scenarios (e.g. Zhou et al. (2024)), both of which are aims of the proposed model.
As described in Stavroulaki et al. (2024), the NM was fitted on data collected from 121 street segments in six central neighbourhoods in Stockholm, Sweden, in October 2017 and which were tested in Gothenburg, Sweden by predicting full-day pedestrian counts in 75 street segments in the city centre. It was tested against real-world observations collected by capturing anonymised wi-fi signals from mobile phones in October 2018 by the traffic planning office of Gothenburg municipality (Trafikkontoret, 2019). The results showed that 52% of the pedestrian variation (i.e., coefficient of determination
2.1.1.1 Measure equation
The LASSO regression model is stated in Equation 1.
with
All the spatial predictors can be easily calculated in the early stages of an urban design project, making it directly applicable to practitioners. Below is the detailed explanation of each predictor.
The angular betweenness centrality Bet2000 is a street network centrality measure introduced in Space Syntax (Hillier and Iida, 2005) and tailored to the particularities of pedestrian movement, such as using angular distance to calculate the shortest path between street segments which correlates well to how pedestrians navigate and choose their paths, and using street-based representations of the network for calculation (e.g., Stavroulaki et al., 2017; Stavroulaki, 2022). Bet2000 is angular betweenness calculated in a radius of 2000 m to indicate local street centrality. High angular betweenness centrality at the local scale means that a street mediates the shortest paths connecting all possible origins and destinations within the local context of each street.
The formula of angular betweenness centrality is given in Equation 2 as follows:
where
The predictor LMarkets500 is the number of local markets (e.g., daily services, retail, cafes, and restaurants) that are reached within a walking distance of 500 m, and Plot500 is the number of plots that are reached within the same walking distance from each street segment. Both variables are based on the Place Syntax methodology that combines accessibility measures to the pedestrian-oriented Space Syntax representations of the street network (Ståhle et al., 2005; Berghauser Pont et al., 2023).
To calculate the number of local markets and plots within 500 m walking distance from each street segment, the equation used is stated in Equation 3:
where
Furthermore, SegLength denotes the street segment length, and SpeedLim the speed limit for this street. All the spatial predictors can be easily calculated in the early stages of an urban design project, making it directly applicable to practitioners.
Since the response variable is strictly positive and its distribution right skewed, a log transformation is applied to the predictor variables before fitting the model. In addition, an inverse transform is performed afterwards to avoid negative predictions.
2.1.2 Agent-based model
An ABM based on the social force model was implemented for this study to simulate micro-scale pedestrian movement. Each pedestrian is modelled as an agent; the ABM thus resolves the micro-scale movement of the individual pedestrians.
The ABM has been implemented as an extension to the particle solver Demify® (Quist et al., 2021) to efficiently handle the agents and their interaction partners. Pedestrians are represented by a particle model consisting of three spheres: body, head, and nose, where the latter indicates their orientation. The simulations require an origin–destination matrix (ODM) as input for a specified time interval; it indicates the distribution of pedestrians that move from one section of the domain to another. For the interaction with the three-dimensional environment, geometries in the form of triangulated meshes are required to represent the buildings and ground.
The implementation of the model allows for an extension with more complex behavioural rules and tactical planning when, for example, empirical rules are present.
2.1.2.1 Governing equations
A social force (Equation 4) is implemented according to Helbing et al. (2000) to act between the centres of two pedestrians. Let
where
Like the social force, a wall social force (Equation 5) between pedestrians and the building geometries is included for obstacle avoidance. Let
where
To drive the pedestrians towards their assigned destination with their desired speed, a motive force (Equation 6) as per Langston et al. (2006) is included, additionally allowing path planning by assigning several ordered destinations to a pedestrian. When pedestrians reach their final destination, they are removed from the simulation. Let
Finally, a model to adapt pedestrian speed for tilting floors (Equation 7) is implemented as per Wang et al. (2013). Let the horizontal velocity without the adaptation for tilting floors be
with
2.1.2.2 Agent-based model parameters
The presented ABM has been verified and validated for outdoor scenarios; the interested reader is referred to Berghauser Pont et al. (2023). The parameter set deduced for outdoor environments is given in Table 1 and applied in this study.

Table 1. Choice of ABM parameters for outdoor environments.
The parameters
2.1.3 Connection of network model and agent-based model
The NM and ABM are utilised together to achieve a comprehensive workflow that gives information on the expected flow of pedestrians and their resolved micro-scale movement for new district designs (Figure 1). The NM predicts the full-day pedestrian counts on each street segment, which can be directly used by urban planners for design evaluation. However, this path is outside of the hybrid model framework and is thus shown in pale colours.
Since an ABM typically simulates pedestrian movement in a more limited time frame, a context-specific factor must first be used to calculate the expected number of pedestrians in specific time frames. With this factor, the full-day pedestrian counts predicted by the NM are converted to the accumulated flows for the time frame to be considered.
The connection of the two models follows three steps.
1. The NM predicts the pedestrian counts for the line segments
2. The origin–destination matrix
with
where the factor
3. The ODM initialises the ABM simulations. Intermediate targets are added to smoothly guide the pedestrians through the domain between the origin and destination line segments, such as at sharp corners or crosswalks.
A detailed example of the connection between the two models is given in Section 1 in the supplement.
Note that this approach simplifies the actual pedestrian movement since dominant directions on street segments can exist—for example, pedestrians will only move away from a mall in the evening at closing time and none will go towards it. The NM predicts the total presence of pedestrians in both directions, and to this day there has not been generalisable empirical evidence to suggest methods to weigh the two directions differently. Case-specific calibrations could be made, but the hybrid model aims to offer a generalisable methodology that does not require the collection of real-world data. Therefore, half of the predicted pedestrians for a line segment are assumed to enter the domain from that segment, and the other half are assumed to exit through the same segment. Furthermore, the segments must be chosen carefully since paths in open spaces or crossings are modelled as individual street segments in the NM, following the standard Space Syntax methodology of street network modelling.
This workflow allows urban planners to investigate different scenarios or designs based on the inputs that the models receive. As illustrated in Figure 1, the NM receives information on spatial parameters at the street level (street network centrality, accessibility to local markets and plots, speed limit, and segment length), and the ABM receives input in form of building and terrain geometries as well as the specified model parameters to control the force equations. Based on the outcomes of the hybrid model, urban planners can then decide whether their design is of sufficient quality considering pedestrian movement. If not, altered or new design ideas can be evaluated with the hybrid model, which allows the testing of different design and planning scenarios in different scales. If there is a change in the street network, for instance, by blocking one street due to construction, then the NM will change to represent the scenario with the removed street and estimate the effects of this contextual change in the inflows and outflows of the domain, which will in turn affect the ABM. If, on the other hand, changes only appear on a local scale not affecting the street network, such as new public art or seating, the ABM environment will change to represent the new scenario to include the added obstacles to estimate the change in the movement patterns. In this case, the NM part of the hybrid model does not need to change. The hybrid model aims to enable the study of a certain state rather than dynamic changes since the NM does not predict the pedestrian flow for specific events (e.g. a football match) as the input data for the NM contain everyday pedestrian flow. If an urban planner is interested in a specific state, the ABM and NM can be adapted as elaborated above. Dynamic changes can be principally included in the ABM—for example, by a dynamic change of model parameters and boundary conditions—but are not considered in the present study.
2.1.4 Real-world data collection for comparison with the proposed model
To evaluate the reliability of the proposed workflow, an assessment of the ability to predict and simulate the daily movement of pedestrians is required. Thus, a comparison between real-world measurements of pedestrian movement and the hybrid model is performed in this study.
2.2 Case study: real-world pedestrian precinct
To evaluate the proposed workflow, the case of a pedestrian precinct in the centre of the Swedish city of Gothenburg is considered, including a tram stop, a large pedestrian crossing, a square, and the entrance to a pedestrian area being a space shared by cars, cyclists, and pedestrians, although dominated by the latter (Figure 2). Note that the domain sections in this example have been chosen subjectively from studying real-world data as areas where pedestrians enter and leave the simulation domain.
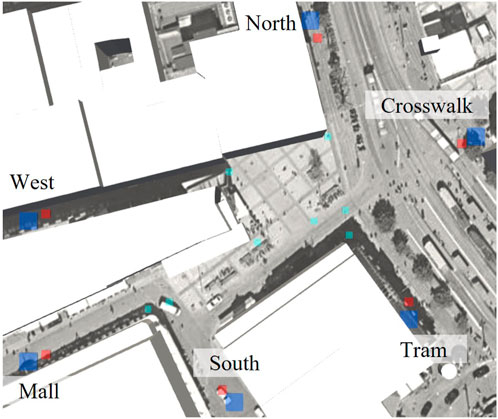
Figure 2. Identification of main directions: West, North, Crosswalk, Tram, South, and Mall. Visualisation of choice of origin (red), destination (dark blue), and intermediate destination points (light blue), underlaid with a sensor recording of the area. White domains are obstacles received from the building geometry.
2.2.1 Real-world measurements
Measurements were performed with grids of smart stationary sensors from Viscando AB3. These sensors, based on 3D vision and artificial intelligence, detect, classify, and track all types of road users 20 times per second. Track data from several sensors are fused for large area measurements, as in this case. These sensors process images in embedded computational units and permanently delete the images within 20 mins of acquisition. Only road user trajectories are stored. Therefore, images are neither recorded nor transmitted, ensuring full GDPR compliance. These traffic measurement techniques with smart sensors provide individual, time-resolved trajectories that are directly comparable with simulation results from the ABM. Beyond that, post-processed and integrated data of the measurements also allow comparison with the simulation results of the NM.
The experimental recordings were taken from 26 June to 1 July 2018. The measurements were made for the Swedish National Road and Transport Research Institute within the EU’s CoExist project. The goal was to obtain the basis for simulations of interactions between future autonomous vehicles and pedestrians (Olstam et al., 2020; Johansson et al., 2020).
2.2.2 Case-specific model setup
For the comparison, an ordinary weekday in the early afternoon—27 June 2018, 2:00–3:00 pm—was chosen. Note that the recorded hourly number of pedestrians in the real-world measurements was approximately 3,000, while in the morning hours, approximately 1,000 were measured; a maximum was reached at 6:00 pm with approximately 5,000. The chosen period represents an average occupation, while more densely populated scenarios could also be studied using the evening hours instead.
2.2.2.1 Network model
Following the original NM methodology (Berghauser Pont et al., 2023; Stavroulaki et al., 2024), the predictors for the case study were calculated using the place syntax tool for spatial analyses (PST)4. Bet2000 and SegLength were calculated for the non-motorised street network of Gothenburg (Stavroulaki et al., 2020), the predictor SpeedLim was retrieved from the NVDB road network5 (Nationell Vagdatabas, Sweden), and LMarkets500 and Plot500 were calculated for the non-motorised street network using two additional datasets: a point dataset of local market uses6 (i.e., retail services, food, and drinks) and a polygonal dataset including the plots7 (i.e., properties). The NM predictions with values for each predictor variable and response variable for each street segment are listed in Table 2.
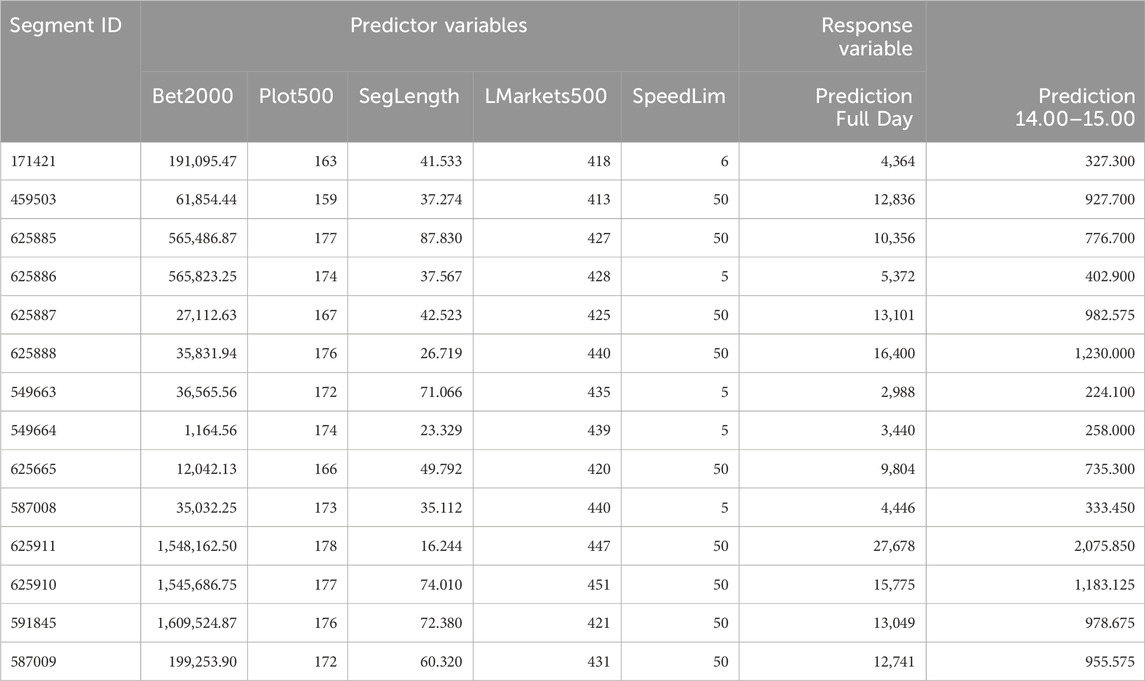
Table 2. NM predictors and response variables per segment ID for the pedestrian precinct. Based on the full day predictions, the predictions for the time-frame 2:00–3:00 p.m. are estimated.
Based on this configuration, the NM predicted full-day pedestrian flows for each street segment, IDs of which are shown in Figure 3A. A factor of 0.075 was then used to obtain the hourly count for the time interval 2:00–3:00 pm to convert the data into an ODM for the ABM. The retrieved hourly predictions are shown in Figure 3B. The factor was based on a consistent trend in real-world observations in central Gothenburg (Trafikkontoret, 2019). Measured on 75 street segments, the fraction “count 2.00–3.00 pm/total-day count” had a median of 0.0751 and a mean of 0.0757.
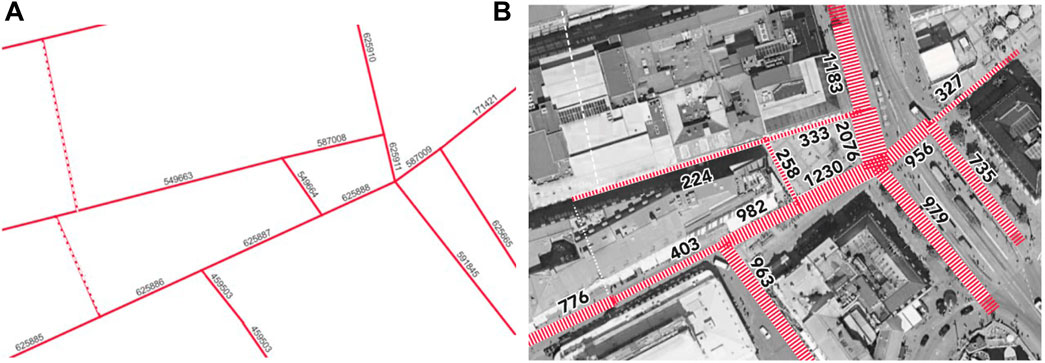
Figure 3. Details of the NM prediction for the pedestrian precinct with street segment IDs in (A) and the predicted distribution of the number of pedestrians in (B).
2.2.2.2 Agent-based model
For the ABM, information about the built environment (building footprints, LiDaR point clouds of the terrain) was provided by the Swedish National Land Survey (Lantmäteriet). The raw data were then processed by the DTCC Builder (Logg et al., 2022; Naserentin and Logg, 2022) to generate building and terrain triangle meshes without detailed information about entrances, building types, or roads. Small objects such as benches or greenery were not included and must be modelled manually.
Six main directions of movement were identified in this precinct, which define the origin and destination areas (Figure 2). To guide pedestrians, intermediate destinations in the sense of route planning are included (light blue in Figure 2).
The ABM simulation was performed over a 15-min interval, scaled to the complete hour, since the statistical variation in the simulation is small.
3 Results
The hybrid model was applied for the simulation of the case of a pedestrian precinct (Section 2.2), and the results are presented in this section together with a comparison to the real-world data (RWD) available for the pedestrian movement in this precinct.
From the NM, accumulated pedestrian flows can be derived at the chosen locations, and their agreement to the RWD is pre-evaluated in Section 3.1 to assess the quality of the input to the ABM.
Note that, as reported in the original studies (Berghauser Pont et al., 2023; Stavroulaki et al., 2024), the NM has a general model performance of
Finally, in Section 3.2, the results from the hybrid simulation are presented and compared to the available RWD.
3.1 Comparison of pedestrian counts
The ODM of the RWD (Table 3) shows that the number of pedestrians who move from and towards an area are similar, which justifies the assumption of splitting the accumulated pedestrian flow in half for each direction for the input into the ABM (see the hybrid model description in Section 2.1.3). Similarly, the ODM derived from the NM predictions is summarised in Table 4. The total number of pedestrians predicted in the NM is 2,543, while 3,130 were measured for the timeframe 2:00–3:00 pm, resulting in reasonable agreement.

Table 3. Distribution of pedestrians in % from origins to destination points derived from RWD. The bold values indicate the accumulated column and/or row values.

Table 4. Origin–destination matrix of pedestrians in % derived from the NM given as input boundary conditions to the ABM. The bold values indicate the accumulated column and/or row values.
To facilitate a direct comparison, the ODM predictions from the NM and the ODM from the RWD are given in Figure 4, which visualises the share of pedestrians having each direction as either origin (orange) or destination (blue). The RWD bars are given with a dashed contour line, and all bars are transparent, allowing the overlap to be seen clearly. While the NM notably overpredicts the pedestrians at “South” and underpredicts the pedestrians at “Tram”, the overall distribution is captured with most pedestrians at “North”, “Crosswalk”, and “Tram”, and fewer pedestrians at the remaining directions, with fewest at “West”. Note that it is only at “West” that halving the number of pedestrians is not a suitable assumption, which is visible by the deviation of the NM prediction from the RWD. Nevertheless, the NM predicts a somewhat more even distribution than seen in the RWD.
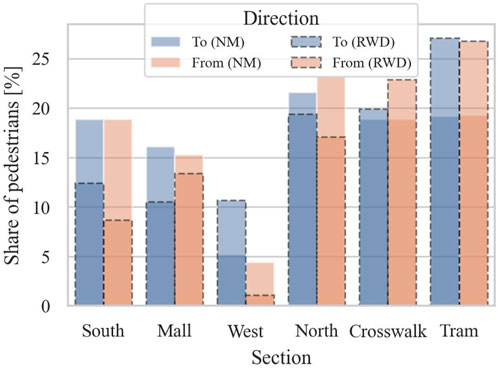
Figure 4. Comparison of the total share of pedestrians with each section as origin (From) and destination (To) point from the NM predictions to RWD.
Deviations are to be expected, given that the NM has a general regression coefficient of 0.52 when predicting full-day counts in central Gothenburg (as described in the respective section). However, a reasonable quantitative and qualitative agreement of the pedestrian distribution is obtained which justifies the reliability of the proposed modelling procedure for the urban planning and design of new urban districts. Given the small sample of the measurements, conducting more rigorous statistical correlations for the specific case study is not feasible.
Based on the NM results from Table 4, the ODM for the ABM is derived as described in the case-specific model setup.
3.2 Comparison of hybrid model results
Comparing the hybrid model’s simulation results with the measurements is performed using heat maps and trajectory plots in Figures 5A, B.
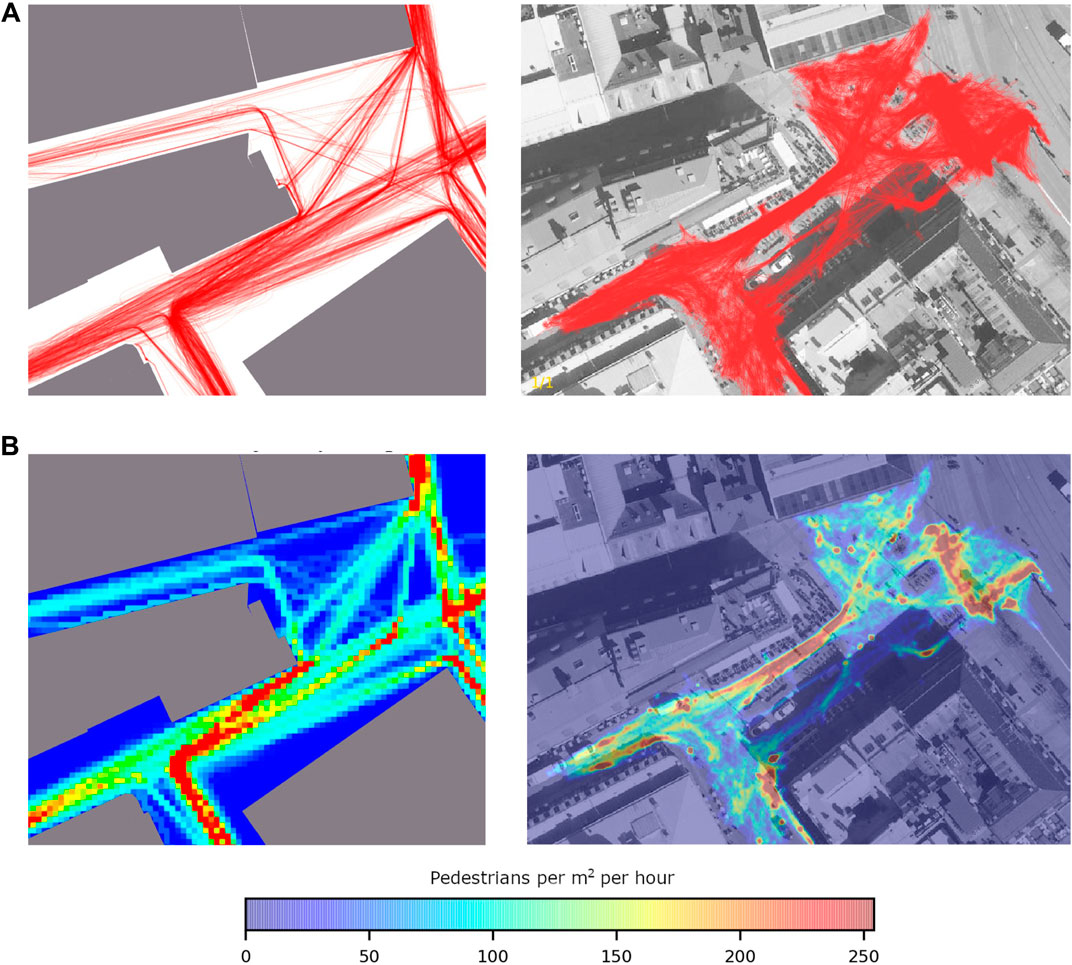
Figure 5. Pedestrian trajectory (A) and heat map (B) comparison for simulation results (left) and measurements (right). (A) Pedestrian trajectory comparison. (B) Comparison of heat maps of pedestrian occupancy.
In the trajectory plot and heat map, real-world pedestrians have more chaotic behaviour than modelled in simulations owing to the force-driven nature of the ABM, causing pedestrians to take direct routes when possible. Nevertheless, important characteristics are preserved, such as a wide sidewalk area occupied by pedestrians near “Crosswalk” and towards “North”, sparse occupation on the central square, and a strong concentration of pedestrians in the central street of the domain and towards “Crosswalk”. An overall reasonable agreement between the simulation results and the RWD is obtained.
The ABM now enables analysis of the local pedestrian flow and the identification of pedestrian conflicts, such as violations of personal space or the inability to move at their desired speed. Here, we computed the distance between the pedestrians as well as the deviation from the desired speed and the mean strength of this deviation. The former represent a violation of space while the latter allow evaluation when pedestrians were forced to slow down or even accelerate to avoid physical collision. These quantities can be used to identify critical situations in highly crowded events or indicate that the design of places requires alteration to allow for a mostly undisturbed pedestrian flow. Figure 6A illustrates the share of pedestrians who have a distance to another pedestrian of less than 1.5 m (marked black) or even less than 1.0 m (marked red). It can be seen that approximately 15% of all pedestrians frequently have a distance of less than 1.5 m to another pedestrian, but only approximately 5% have a distance of less than 1.0 m. Note, however, that this result is not only a result of the urban environment in which the pedestrians move but is also caused by the parameter set for the social force. Modifying this enables the study of very specific situations which cannot be easily realised with measurement data in real-world situations, such as enforcing that pedestrians keep a greater distance than usual.
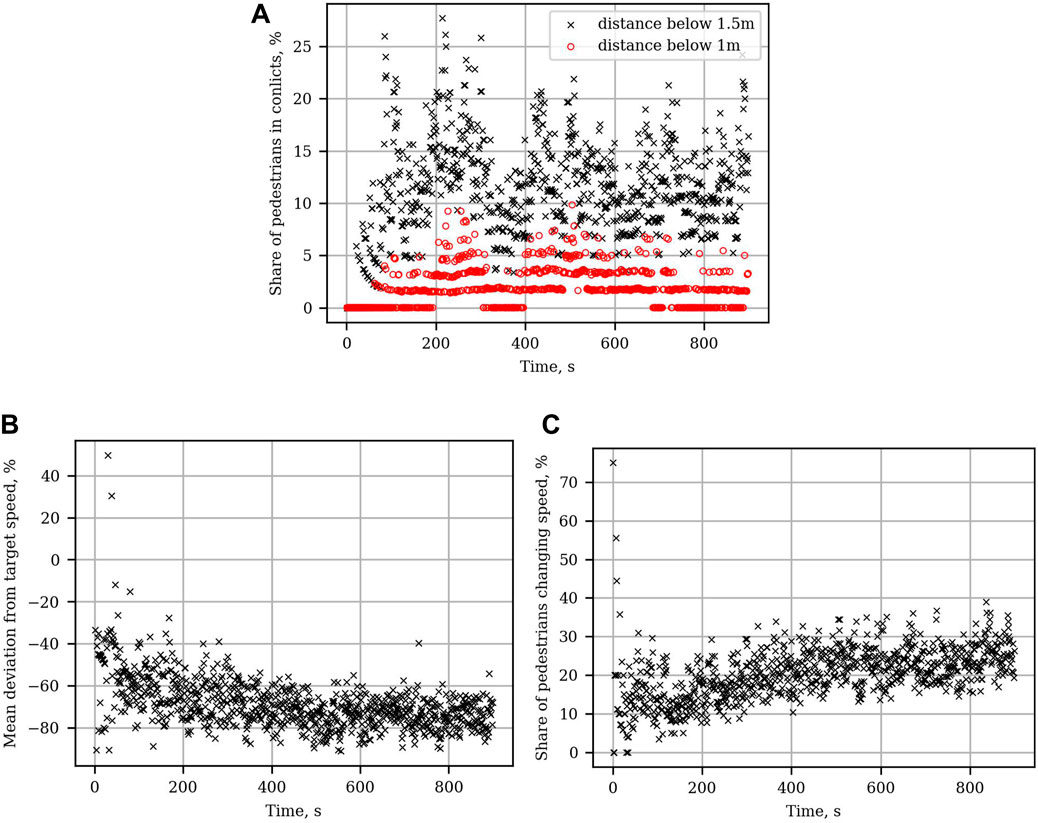
Figure 6. Evaluation of speed deviation during and share of pedestrians who encounter conflicts with other pedestrians. (A) Share of pedestrians in close proximity to other pedestrians. (B) Mean deviation from the desired speed of pedestrians in close proximity to other pedestrians. (C) The share of pedestians that deviate from their desired speed.
The pedestrians are modelled so that each has a desired velocity which they desire to maintain. Thus, analysing the need to deviate from this desired velocity also sheds light on the pedestrian flow. Figure 6C shows the share of pedestrians who needed to change their velocity on the left, and the mean deviation from the desired speed is visualised in Figure 6B. It is apparent that, most of the time, approximately 10%–30% of the pedestrians have to adapt their velocity due to other pedestrians or obstacles. The plot on the right shows that the deviations mostly slow down to 50–80% of the desired speed while in only a few events do single pedestrians also accelerate to avoid physical contact. This combined analysis shows that a relevant share of the pedestrians are in some interaction with others but few really exhibit a violation of personal space, which most often occurs when they round a corner.
4 Discussion
This study describes a hybrid model that couples an NM and an ABM—two existing well-used methodologies of pedestrian modelling operating separately in different scales—to provide a holistic workflow for predicting pedestrian movement specifically for urban designers and planners based on spatial parameters that can be defined in the early design phases. The comparison with real-world data in a pedestrian precinct in the city centre of Gothenburg, Sweden, has shown reasonable agreement, supporting the reliability of the proposed hybrid model.
Currently, ABM has limited use in urban design and planning practice since it relies on real-world data to define the number of pedestrians in the considered area and their ODM. Gathering these data is not feasible in planned, yet-to-exist areas. Coupling the ABM with an NM solves this problem and thus improves the usability of ABMs for urban designers and planners.
In relation to previous approaches of combining macro- and micro-scale simulations, this study makes the following contributions.
The proposed hybrid approach has affinities with the hybrid models presented by Hanna (2021) and Turner and Penn (2002) since it combines the space syntax measure of centrality (i.e., angular betweenness) as the main predictor of the NM with the visual parameters (i.e., angle and depth of vision) as the main parameters of the ABM. However, our approach is a step forward because it includes more spatial predictors (e.g., accessibility to local markets and speed limit) for the macro-simulation. In relation to the method proposed by Ma et al. (2023), where aggregate flow patterns emerge bottom-up from the agents’ movements (from micro to macro), our method builds in an opposite direction where the aggregate flow patterns inform the micro-scale agent’s movement. This is in line with the purpose of the method, which is to inform top–down urban design and planning in both scales and assist in design scenario analysis. The referenced hybrid models (Turner and Penn, 2002; Hanna, 2021) are evaluated using statistical measures, similar to the calculation of the coefficient of determination
The proposed workflow enables a seamless study of pedestrian movement by predicting aggregated pedestrian flows on a large scale and individual pedestrian movement on a small scale. The NM forecast of the aggregated flow gives a first estimate of an average occupancy and can also provide information about the average variation during the day. This enables the identification of critical areas (e.g., with a high pedestrian density) that can be analysed in more detail with the accompanied ABM based on the average occupation given by the NM, thus enhancing computational efficiency by focusing detailed study only on areas of interest. The ABM individually tracks pedestrians during the simulation, allowing for the detailed and statistical analysis of instances such as potential collisions of pedestrians and the need to change direction or deviate from their desired speed. Furthermore, micro-scale information can be accounted for in the ABM, such as benches, cycle racks, or statues that potentially divert pedestrian flow, or the ability to traverse squares, as exemplified in the case study. As the ABM presented here is granular, it can be refined with more available information, and behavioural rules of thumb can be implemented when applicable. Furthermore, the simulation is roughly real-time, which facilitates the integration of the simulation in a planning process.
Moreover, the hybrid model allows various scenarios to be tested, as elaborated in Section 2.1.3. These can be changes within the micro-scale domain (e.g., new benches), changes in the macro-scale context that affect inflows and outflows to the domain (e.g., street network and infrastructure), changes of the agents’ behaviour to represent different groups of pedestrians (e.g., age, disability, and social distancing), or environmental changes (e.g., day, time, weather, and season). An example of a micro-scale scenario is provided in Section 2 of the Supplement, where an additional obstacle was introduced that affects only the ABM simulation. This example illustrates how the hybrid model can be utilised to investigate various scenarios.
Thus, the hybrid model can be applied to understand pedestrian behaviour at various times and for different demographic groups, direct pedestrian flows, evaluate bottleneck situations and traffic safety, assess the dimension of a public space, and evaluate the perception of a place. Additionally, visualising and demonstrating pedestrians moving in the considered area enhance the planning process as well as comprehensive communication.
While these advantages justify the application of such tools in the planning process, some drawbacks of the current implementation, hybrid models in general, and potential improvements need to be noted. The NM and the ABM have individual shortcomings and model-specific assumptions which can be improved separately. This is, however, not the topic of this discussion since we focus on the proposed workflow of combining these two models, whereas the individual models can be substituted by other or improved implementations of similar types of models.
Only scenarios corresponding to the input data used for training the NM (which corresponds to everyday scenarios) can be analysed with the proposed hybrid model. Moreover, different sorts of input data are required: large-scale official network data of the pedestrian infrastructure for the NM and resolved geometry data for the ABM, which must be consistent. Moreover, to connect the two models, we derive the distribution of the ODM based on half of the accumulated flow. This assumption has been shown to be suitable for the studied area (Section 3.1). More studies in setups with different complexity and characteristics supported by measurements are required to refine this approach.
Finally, in this study, the focus has been on how the ABM obtains input from an NM. However, further research could explore the benefits of a two-way coupling between an ABM and an NM and how the results of the microscopic simulation improve the macroscopic modelling regarding spatial representations, spatial measures, and predictors on a large scale.
Data availability statement
Network model
The network model was built using the “Non-motorised street network of Gothenburg” geodata which is available upon request via the Swedish National Database9. The link to download the geodataset including documentation is https://doi.org/10.5878/x49h-pv07. The dataset is published under the Creative Commons license [CC BY-NC-SA 4.0]. For the full reference, see Stavroulaki et al. (2023).
The software used for spatial analysis and for the calculation of predictors Bet 2000, SegLength, LMarkets500, and Plot500 for the case study was the open-source software PST (Place Syntax Tool) available via GitHub10. PST is an open-source plugin for the open-source GIS software QGIS11. For the calculations, PST version 3.2.4 and QGIS version 3.16 were used.
The geodatasets used to calculate the predictors LMarkets500 and Plot500, apart from the non-motorised street network of Gothenburg mentioned previously (Stavroulaki et al., 2020), were:
1. A point dataset of local market uses (i.e., retail, services, food, and drinks) for the city of Gothenburg, made available upon request by the Spatial Morphology Group12 at Chalmers University. The dataset was created by SMoG in 2017 using the Open Street Maps dataset: Points of Interest (POI) (accessible via https://download.geofabrik.de) and selecting only the features with Codes 25XX (retail and services) and 23XX (food and drinks).
2. A polygonal dataset including the plots (i.e., properties), also made available upon request by the Spatial Morphology Group (SMoG). The dataset was created by Bobkova (2019) based on the official property geodataset included in “Översiktskartan” (i.e., general map) accessible via the Swedish Land Survey Authority.13 The dataset cannot be published since this is not permitted by Lantmateriet’s terms of use (https://www.lantmateriet.se/vartsamordningsansvar). For more information about the processing of the property dataset, please see Bobkova (2019).
Finally, the predictor “SpeedLimit” was retrieved directly from the NVDB road network dataset (Nationell Vägdatabas, Sweden) accessible via https://lastkajen.trafikverket.se [Public Domain CC0]. The dataset was downloaded on 23-04-2022.
The Python code of the machine learning model that was used for the macro-simulation of the full-day pedestrian counts is published at GitHub by the Spatial Morphology Group (SMoG)14. There, the two real-world datasets on pedestrian counts used to fit and evaluate the macro-simulation model are referenced. The validating data were collected in Gothenburg in 2018 by the Traffic Planning Office in Gothenburg municipality Trafikkontoret (2019) and were processed by the SMoG. The training data were collected in Stockholm in 2017 by the SMoG in collaboration with the private company Bumbee labs (https://bumbeelabs.com) (Stavroulaki and Berghauser Pont, 2018).
The real-world data collected in Gothenburg were also provided to the authors by Gothenburg municipality and were further used to estimate the hourly count for the time slot 14:00–15:00 used in the case study. The dataset cannot be published but can be requested from the Traffic Planning Office at Gothenburg municipality.
Agent-based model
The agent-based model was implemented as a Python extension by the Fraunhofer-Chalmers Centre15 to the Demify® solver for the Discrete Element Method developed by the Fraunhofer-Chalmers Centre and IPS Particle Technology16. Both the extension and the code base for Demify® cannot be published due to licensing agreements. Micro-scale information about the built environment (building footprints, LiDaR point clouds of the terrain) was provided by the Swedish National Land Survey, Lantmäteriet17. The raw data were then processed by the DTCC Builder to generate two separate building and terrain triangle meshes (Logg et al., 2022; Naserentin and Logg 2022). Making this dataset publicly available is prohibited by Lantmäteriet’s terms of use (https://www.lantmateriet.se/vartsamordningsansvar).
Real-world measurement data
The measurement data of the two real-world cases were retrieved and gathered by Viscando AB18. The data were analysed and the origin–destination matrices were manually extracted and are stated in the manuscript for the case study. The figures based on the measurements were created by Viscando AB. The data cannot be published due to a confidentiality agreement. In particular, the measurements for the real-world pedestrian precinct were made for the Swedish National Road and Transport Research Institute within the EU’s CoExist project. The goal was to obtain a basis for simulations of interactions between future autonomous vehicles and pedestrians (Olstam et al., 2020; Johansson et al., 2020).
Author contributions
AU: formal analysis, methodology, validation, visualization, writing–original draft, and writing–review and editing. FH: formal analysis, methodology, supervision, visualization, writing–original draft, writing–review and editing, and validation. IS: formal analysis, methodology, visualization, writing–original draft, and writing–review and editing. AB: methodology, software, and writing–review and editing. KJ: software, supervision, and writing–review and editing. YT: data curation, formal analysis, and writing–review and editing. AG: conceptualization, investigation and writing–review and editing. JQ: supervision and writing–review and editing. MBP: funding acquisition, project administration, supervision, writing–review and editing, and writing–original draft. FE: funding acquisition, supervision, and writing–review and editing.
Funding
The authors declare that financial support was received for the research, authorship, and/or publication of this article. This work is part of the Digital Twin Cities Centre supported by Sweden’s Innovation Agency Vinnova under Grant No. 2019-00041.
Conflict of interest
AB and KJ were employed by the company Industrial Path Solutions AB. YT was employed by the company Viscando AB.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
MBP declares that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fbuil.2024.1447377/full#supplementary-material
Abbreviations
GDPR, general data protection regulation; NM, network model; ABM, agent-based model; ODM, origin-destination-matrix; RWD, real-world data.
Footnotes
1Code available on GitHub: https://github.com/SMoG-Chalmers/crowd-movement
2LASSO is a regularised regression method that constrains the sum of the absolute values of the model coefficients (i.e., penalisation of coefficients). This results in a sparse model where some coefficients are exactly 0, indicating that they do not contribute to predicting the response variable, avoiding overfitting and handling redundant information and multicollinearity. So while many coefficients were initially tested in the model building (Berghauser Pont et al., 2023), the final predictors were only four. For the complete list of tested coefficients, please refer to the original publication, Stavroulaki et al. (2024).
4PST is an open-source plugin for QGIS. Download from: https://www.smog.chalmers.se/projects/pst-plugin-for-qgis
5https://lastkajen.trafikverket.se, date of download 2022–04–23.
6Created based on Open Street Maps, Points of Interest (POI) Codes: 25XX: retail and services, 23XX: food and drinks (https://download.geofabrik.de).
7Data retrieved from Spatial Morphology Group, SMoG, Chalmers University of Technology. See Bobkova (2019).
8Turner and Penn (2002) report a coefficient of determination
9SND, https://snd.gu.se
10https://github.com/SMoG-Chalmers/PST or https://www.smog.chalmers.se/pst
12SMoG, https://www.smog.chalmers.se
13Lantmateriet, https://zeus.slu.se/get/
14https://github.com/SMoG-Chalmers/crowd-movement
15https://www.fcc.chalmers.se/
16https://industrialpathsolutions.com/
References
Basu, R., and Sevtsuk, A. (2022). How do street attributes affect willingness-to-walk? city-wide pedestrian route choice analysis using big data from boston and san francisco. Transp. Res. part A policy Pract. 163, 1–19. doi:10.1016/j.tra.2022.06.007
Berghauser Pont, M., Haupt, P., Berg, P., Alstäde, V., and Heyman, A. (2021). Systematic review and comparison of densification effects and planning motivations. Build. Cities 2, 378–401. doi:10.5334/bc.125
Berghauser Pont, M., and Marcus, L. (2015). “What can typology explain that configuration cannot,” in Proceedings of the SSS10 10th international space syntax symposium (London, UK), 13–17.
Berghauser Pont, M., Stavroulaki, G., Hunger, F., Ullrich, A., Gösta, A., Marcus, L. H., et al. (2023). Crowd movement - DTCC milestone project. Gothenburg, Sweden: Chalmers University of Technology. doi:10.13140/RG.2.2.26267.23846
Berghauser Pont, M., Stavroulaki, G., and Marcus, L. (2019a). Development of urban types based on network centrality, built density and their impact on pedestrian movement. Environ. Plan. B Urban Anal. city Sci. 46, 1549–1564. doi:10.1177/2399808319852632
Bird, E. L., Ige, J., Pilkington, P., Pinto, A., Petrokofsky, C., and Burgess-Allen, J. (2018). Built and natural environment planning principles for promoting health: an umbrella review. BMC public health 18–1013. doi:10.1186/s12889-018-5870-2
Blue, V., Embrechts, M., and Adler, J. (1997). “Cellular automata modeling of pedestrian movements,” in 1997 IEEE international conference on systems, man, and cybernetics. computational cybernetics and simulation (Ieee), 2320–2323. doi:10.1109/ICSMC.1997.6352723
Bobkova, E. (2019). Towards a theory of natural occupation: developing theoretical, methodological and empirical support for the relation between plot systems and urban processes. Gothenburg, Sweden: Chalmers University of Technology. Phd thesis.
Bolin, D., Verendel, V., Berghauser Pont, M., Stavroulaki, I., Ivarsson, O., and Håkansson, E. (2021). Functional anova modelling of pedestrian counts on streets in three european cities. J. R. Stat. Soc. Ser. A Statistics Soc. 184, 1176–1198. doi:10.1111/rssa.12646
Bongiorno, C., Zhou, Y., Kryven, M., Theurel, D., Rizzo, A., Santi, P., et al. (2021). Vector-based pedestrian navigation in cities. Nat. Comput. Sci. 1, 678–685. doi:10.1038/s43588-021-00130-y
Campanella, M., Hoogendoorn, S., and Daamen, W. (2011). “A methodology to calibrate pedestrian walker models using multiple-objectives,” in Pedestrian and evacuation dynamics, 755–759. doi:10.1007/978-1-4419-9725-8_69
Crociani, L., Lämmel, G., and Vizzari, G. (2016). “Multi-scale simulation for crowd management: a case study in an urban scenario,” in Autonomous agents and multiagent systems: AAMAS 2016 workshops, Singapore, may 9-10, 2016, revised selected papers (Springer), 147–162. doi:10.1007/978-3-319-46882-2_9
Davidich, M., and Köster, G. (2012). Towards automatic and robust adjustment of human behavioral parameters in a pedestrian stream model to measured data. Saf. Sci. 50, 1253–1260. doi:10.1016/j.ssci.2011.12.024
Dhanani, A., and Vaughan, L. (2016). “Towards a walkability model for strategic evaluation of policy action and urban active transport interventions,” in 48th meeting of the universities Transport study group (UTSG).
Dong, H., Zhou, M., Wang, Q., Yang, X., and Wang, F.-Y. (2020). State-of-the-art pedestrian and evacuation dynamics. IEEE Trans. Intelligent Transp. Syst. 21, 1849–1866. doi:10.1109/TITS.2019.2915014
Dridi, M. H. (2015). List of parameters influencing the pedestrian movement and pedestrian database. Int. J. Soc. Sci. Stud. 3. doi:10.11114/ijsss.v3i4.870
Duives, D. C., Daamen, W., and Hoogendoorn, S. P. (2013). State-of-the-art crowd motion simulation models. Transp. Res. Part C Emerg. Technol. 37, 193–209. doi:10.1016/j.trc.2013.02.005
Hanna, S. (2021). Random walks in urban graphs: a minimal model of movement. Environ. Plan. B Urban Anal. City Sci. 48, 1697–1711. doi:10.1177/2399808320946766
Hansen, A. (2018). A scoping review for the parameters of crowd movement. Lund, Sweden: LUTVDG/TVBB.
Helbing, D., Farkas, I., and Vicsek, T. (2000). Simulating dynamical features of escape panic. Nature 407, 487–490. doi:10.1038/35035023
Hillier, B., and Iida, S. (2005). “Network and psychological effects in urban movement,” in International conference on spatial information theory (Springer), 475–490. doi:10.1007/11556114_30
Hillier, B., Penn, A., Hanson, J., Grajewski, T., and Xu, J. (1993). Natural movement: or, configuration and attraction in urban pedestrian movement. Environ. Plan. B Plan. Des. 20, 29–66. doi:10.1068/b200029
Hoogendoorn, S. P., and Bovy, P. H. (2004). Pedestrian route-choice and activity scheduling theory and models. Transp. Res. Part B Methodol. 38, 169–190. doi:10.1016/S0191-2615(03)00007-9
Hoogendoorn, S. P., van Wageningen-Kessels, F. L., Daamen, W., and Duives, D. C. (2014). Continuum modelling of pedestrian flows: from microscopic principles to self-organised macroscopic phenomena. Phys. A Stat. Mech. its Appl. 416, 684–694. doi:10.1016/j.physa.2014.07.050
Johansson, F., Pereira, I., Olstam, J., Bernhardsson, V., and Ivari, M. (2020). “CoEXist Use Case 1 – shared space: technical report on the application of AV-ready modelling tools,” in Tech. rep. (CoEXist).
Kaup, D., Clarke, T. L., Oleson, R., Malone, L., and Jentsch, F. G. (2008). Introducing age-based parameters into simulations of crowd dymanics, in 2008 winter simulation conference (IEEE), 895–902. doi:10.1109/WSC.2008.4736154
Kneidl, A., Hartmann, D., and Borrmann, A. (2013). A hybrid multi-scale approach for simulation of pedestrian dynamics. Transp. Res. part C Emerg. Technol. 37, 223–237. doi:10.1016/j.trc.2013.03.005
Lämmel, G., Seyfried, A., and Steffen, B. (2014). Large-scale and microscopic: a fast simulation approach for urban areas. Annu. Meet. Prepr. 14, 3890.
Langston, P. A., Masling, R., and Asmar, B. N. (2006). Crowd dynamics discrete element multi-circle model. Saf. Sci. 44, 395–417. doi:10.1016/j.ssci.2005.11.007
Legeby, A. (2013). Patterns of co-presence: spatial configuration and social segregation. Stockholm, Sweden: KTH Royal Institute of Technology. Ph.D. thesis (Accessed october 29, 2021).
Legeby, A., Pont, M. B., and Marcus, L. (2015). Street interaction and social inclusion. Suburb. urbanites Suburbs life high Str., 239–262doi. doi:10.2307/j.ctt1g69z0m.19
Liberto, C., Nigro, M., Carrese, S., Mannini, L., Valenti, G., and Zarelli, C. (2020). Simulation framework for pedestrian dynamics: modelling and calibration. IET Intell. Transp. Syst. 14, 1048–1057. Scientific Seminar of the Italian-Association-of-Transport-Academicians (SIDT), Univ Salerno, Fisciano, ITALY, SEP, 2019. doi:10.1049/iet-its.2019.0677
Litman, T. (2020). Evaluating active transport benefits and costs. guide to valuing walking and cycling improvements and encouragement programs
Logg, A., Naserentin, V., Wästerberg, D., Eleutheriou, O., Olsson, A., and Annlöv, A. (2022). DTCC builder. Data processing, modeling and simulation for the digital Twin cities platform. Available at: https://gitlab.com/dtcc-platform/dtcc-builder.
Ma, L., Brandt, S. A., Seipel, S., and Ma, D. (2023). Simple agents–complex emergent path systems: agent-based modelling of pedestrian movement. Environ. Plan. B Urban Anal. City Sci. 51, 479–495. doi:10.1177/23998083231184884
Naserentin, V., and Logg, A. (2022). Digital twins for city simulation: automatic, efficient, and robust mesh generation for large-scale city modeling and simulation. ArXiv Prepr. arXiv:2210, 05250. doi:10.48550/arXiv.2210.05250
Netto, V., Saboya, R., Vargas, J. C., Figueiredo, L., Freitas, C., and Pinheiro, M. (2012). “The convergence of patterns in the city:(isolating) the effects of architectural morphology on movement and activity,” in Eighth international space syntax symposium, 1–32.
Olstam, J., Johansson, F., Liu, C., and Pereira, I. (2020). CoEXist Deliverable 4.2: technical report on the application of av-ready modelling tools. Tech. Rep. CoEXist.
Özbil, A., Peponis, J., and Stone, B. (2011). Understanding the link between street connectivity, land use and pedestrian flows. Urban Des. Int. 16, 125–141. doi:10.1057/udi.2011.2
Özbil, A., Yeşiltepe, D., and Argın, G. (2015). Modeling walkability: the effects of street design, street-network configuration and land-use on pedestrian movement. AZ ITU J. Fac. Archit. 12, 189–207.
Paris, S., Pettré, J., and Donikian, S. (2007). “Pedestrian reactive navigation for crowd simulation: a predictive approach,” in Computer Graphics Forum (Wiley Online Library), 26, 665–674. doi:10.1111/j.1467-8659.2007.01090.x
Penn, A., Hillier, B., Banister, D., and Xu, J. (1998). Configurational modelling of urban movement networks. Environ. Plan. B Plan. Des. 25, 59–84. doi:10.1068/b250059
Peponis, J., Bafna, S., and Zhang, Z. (2008). The connectivity of streets: reach and directional distance. Environ. Plan. B Plan. Des. 35, 881–901. doi:10.1068/b33088
Peponis, J., Ross, C., and Rashid, M. (1997). The structure of urban space, movement and co-presence: the case of atlanta. Geoforum 28, 341–358. doi:10.1016/s0016-7185(97)00016-x
Porter, E., Hamdar, S. H., and Daamen, W. (2018). Pedestrian dynamics at transit stations: an integrated pedestrian flow modeling approach. Transp. A Transp. Sci. 14, 468–483. doi:10.1080/23249935.2017.1378280
Prato, C. G. (2009). Route choice modeling: past, present and future research directions. J. choice Model. 2, 65–100. doi:10.1016/s1755-5345(13)70005-8
Quist, J., Jareteg, K., Bilock, A., and Persson, A. (2021). “Investigation of the effect of size segregation on roller compaction of unbound materials,” in Tech. rep. (Gothenburg: Fraunhofer-Chalmers Centre for Industrial Mathematics, Computational Engineering and Design).
Roe, J., Mondschein, A., Neale, C., Barnes, L., Boukhechba, M., and Lopez, S. (2020). The urban built environment, walking and mental health outcomes among older adults: a pilot study. Front. public health 8, 575946. doi:10.3389/fpubh.2020.575946
Rudloff, C., Schönauer, R., and Fellendorf, M. (2013). Comparing calibrated shared space simulation model with real-life data. Transp. Res. Rec. 2390, 44–52. doi:10.3141/2390-05
Sevtsuk, A., Basu, R., Li, X., and Kalvo, R. (2021). A big data approach to understanding pedestrian route choice preferences: evidence from san francisco. Travel Behav. Soc. 25, 41–51. doi:10.1016/j.tbs.2021.05.010
Sharmin, S., and Kamruzzaman, M. (2018). Meta-analysis of the relationships between space syntax measures and pedestrian movement. Transp. Rev. 38, 524–550. doi:10.1080/01441647.2017.1365101
Song, X., Han, D., Sun, J., and Zhang, Z. (2018). A data-driven neural network approach to simulate pedestrian movement. Phys. A Stat. Mech. its Appl. 509, 827–844. doi:10.1016/j.physa.2018.06.045
Sparnaaij, M., Duives, D. C., Knoop, V. L., and Hoogendoorn, S. P. (2019). Multiobjective calibration framework for pedestrian simulation models: a study on the effect of movement base cases, metrics, and density levels. J. Adv. Transp. 2019, 1–18. doi:10.1155/2019/5874085
Ståhle, A., Marcus, L., and Karlström, A. (2005). “Place syntax: geographic accessibility with axial lines in gis,” in Fifth international space syntax symposium (Stockholm, Sweden: Techne Press), 131–144.
Stavroulaki, G. (2022). “Directions in space syntax. space syntax modelling of pedestrian flows for sustainable urban development, keynote,” in Proceedings 13th space syntax symposium, 2022 (Bergen, Norway: Bergen).
Stavroulaki, G., and Berghauser Pont, M. (2018). “Methodology and results of an international observational study on pedestrian movement tracking anonymised wi-fi signals from mobile phones,” in AESOP annual congress, making space for hope. doi:10.13140/RG.2.2.21825.20321
Stavroulaki, G., Bolin, D., Berghauser Pont, M., Marcus, L., and Håkansson, E. (2019). Statistical modelling and analysis of big data on pedestrian movement. Proc. 12th Int. Space Syntax Symposium 79, 71–79.
Stavroulaki, I., Berghauser Pont, M., Fitger, M., Marcus, L., Legeby, A., and Koch, D. (2023). PST Documentation _v3, 2.4_20230110. doi:10.13140/RG.2.2.23168.51208
Stavroulaki, I., Berghauser Pont, M., Marcus, L., and Sun, K. (2020). Non-motorised network of gothenburg [data set]. doi:10.5878/x49h-pv07
Stavroulaki, I., Ivarsson, O., and Berghauser Pont, M. (2024). “From explanations to predicitons. developing a predictive model of pedestrian flows on existing and planned streets,” in Proceedings of the 14th International Space Syntax Symposium, Nicosia, Cyprus, June 2024.
Stavroulaki, I., Marcus, L., Pont, M. B., and Nilsson, L. C. S. (2017). Representations of street networks in space syntax towards flexible maps and multiple graphs. 11th Int. Space Syntax. Symp. SSS 2017, Lisbon, Port. 3-7 July 2017 5, 174.1–174.16.
Stratford, E., Waitt, G., and Harada, T. (2020). Walking city streets: spatial qualities, spatial justice, and democratising impulses. Trans. Inst. Br. Geogr. 45, 123–138. doi:10.1111/tran.12337
Tordeux, A., Lämmel, G., Hänseler, F. S., and Steffen, B. (2018). A mesoscopic model for large-scale simulation of pedestrian dynamics. Transp. Res. part C Emerg. Technol. 93, 128–147. doi:10.1016/j.trc.2018.05.021
Trafikkontoret, G. S. (2019). Wifi-mätningar av fotgängarflöden i göteborgs innerstad-slutrapport, diarienummer 5799/18
Turner, A., and Penn, A. (2002). Encoding natural movement as an agent-based system: an investigation into human pedestrian behaviour in the built environment. Environ. Plan. B Plan. Des. 29, 473–490. doi:10.1068/b12850
Voloshin, D., Rybokonenko, D., and Karbovskii, V. (2015). Optimization-based calibration for micro-level agent-based simulation of pedestrian behavior in public spaces. Procedia Comput. Sci. 66, 372–381. doi:10.1016/j.procs.2015.11.043
Wang, L., Liu, M., and Meng, B. (2013). Incorporating topography in a cellular automata model to simulate residents evacuation in a mountain area in China. Phys. A Stat. Mech. its Appl. 392, 520–528. doi:10.1016/j.physa.2012.09.019
Wang, S., Gain, J. E., and Nistchke, G. S. (2015). “Controlling crowd simulations using neuro-evolution,” in Proceedings of the 2015 Annual Conference on Genetic and Evolutionary Computation (ACM), 3, 353–360. doi:10.1145/2739480.2754715
Xiong, M., Cai, W., Zhou, S., Low, M. Y. H., Tian, F., Chen, D., et al. (2009). “A case study of multi-resolution modeling for crowd simulation,” in Proceedings of the 2009 Spring Simulation Multiconference, 1–8.
Zhou, D. J., Chahal, R., Gotlib, I. H., and Liu, S. (2024). Comparison of lasso and stepwise regression in psychological data. Methodology 20, 121–143. doi:10.5964/meth.11523
Keywords: agent-based modelling, network model, sensor data, validation, digitisation, urban planning and design
Citation: Ullrich A, Hunger F, Stavroulaki I, Bilock A, Jareteg K, Tarakanov Y, Gösta A, Quist J, Berghauser Pont M and Edelvik F (2024) A hybrid workflow connecting a network and an agent-based model for predictive pedestrian movement modelling. Front. Built Environ. 10:1447377. doi: 10.3389/fbuil.2024.1447377
Received: 11 June 2024; Accepted: 13 September 2024;
Published: 07 November 2024.
Edited by:
Giuseppe Vizzari, University of Milano-Bicocca, ItalyReviewed by:
Minh Kieu, The University of Auckland, New ZealandJarosław Was, AGH University of Science and Technology, Poland
Copyright © 2024 Ullrich, Hunger, Stavroulaki, Bilock, Jareteg, Tarakanov, Gösta, Quist, Berghauser Pont and Edelvik. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Anita Ullrich, YW5pdGEudWxscmljaEBmY2MuY2hhbG1lcnMuc2U=