 Mahmoud Baei
Mahmoud Baei Vesna Terzic*
Vesna Terzic*- Department of Civil Engineering and Construction Engineering Management, California State University, Long Beach, CA, United States
New technological developments in engineering present an opportunity for improved efficiency in structural design through optimization. High-performance computing resources reduce the time needed for computational calculations. Concurrently, optimization algorithms have greatly evolved to provide the opportunity to solve complicated nonlinear engineering problems that typically include several interrelated, and often conflicting, objectives under a set of constraints. This research proposes a method for the optimal design of viscous dampers in seismic applications utilizing the multi-objective particle swarm optimization (MOPSO) algorithm. The MOPSO, with its inherent metaheuristic approach and geographically-based adaptive grids, effectively discovers global and diverse non-convex solutions. To further improve the efficiency and quality of the search in the milieu of an engineering application, we have extended MOPSO by introducing constraints on objective functions and implementing parallel computing. Additionally, this research provides recommendations on how to efficiently generate reliable solution sets by proper selection of objective (cost) functions and adequate set-up of MOPSO input parameters. These recommendations are derived from a series of sensitivity studies. The proposed method is verified by utilizing an engineered solution of a viscously damped moment frame. It was found that under the same set of constraints and performance objectives, MOPSO produces a solution set that contains outcomes that are superior to the engineered solutions. For example, the MOPSO solution set contains outcomes that reduce demands on dampers (force and stroke) while maintaining engineering demand parameters, generating construction savings as a result of the reduced manufacturing costs of dampers.
Introduction
Moment frames with supplementary damping devices (i.e., damped moment frames) are often used for the design of new and retrofit of existing buildings as they are known to improve seismic performance at a reasonable cost (Terzic and Mahin, 2017; Wang and Mahin, 2018a; Del Gobbo et al., 2018). The improved performance is achieved by perturbing the energy balance during an earthquake, such that the inelastic dissipation demand on the moment frame is reduced as a result of energy dissipation by the damping devices. Contrary to expectations, a study by Terzic et al. (Terzic et al., 2014) (which focused on the assessment of the seismic performance of different seismic-force resisting systems of commercial low-rise buildings) demonstrated that a damped moment frame designed per minimum ASCE 7–16 requirements achieves inferior performance than a code-compliant special moment frame. This is a direct result of code criteria that permit high interstory drifts (2.5% for low-rise buildings) along with a relatively small strength (0.75% of the seismic base shear based on strength reduction factor (R) of 8), leading to a highly flexible and relatively weak lateral load-resisting system. However, Terzic and Mahin (Terzic and Mahin, 2017) further showed that a relatively small investment into larger damping devices stiffens up the frame, yielding significant reductions in repair cost and repair time when compared to a code-compliant special moment frame. Interestingly, the improved (beyond the code) damped moment frame achieves far better performance than a special moment frame at a smaller construction cost. Therefore, in addition to conforming to the code requirements, damped moment frames should also conform to the desired performance objectives set by a client.
While the current state of design practice mainly relies on manual iterations of design until design and performance objectives are met, modern optimization algorithms supported by high-performance computing (HPC) resources provide an opportunity for solving complex multi-objective non-convex problems in a timely, accurate, and effective manner. Design of a damped moment frame through optimization will not only reduce the time necessary for design but will also reduce the total system cost.
The optimization algorithms have consistently evolved since their conception. Initially, simple single-objective heuristic algorithms, such as the genetic algorithm proposed by Holland in 1975 (Holland, 1975), have progressed into more complicated single-objective metaheuristic algorithms, such as particle swarm optimization (PSO) proposed by Kennedy and Eberhart in 1995 (Kennedy and Eberhart, 1995). They have further evolved into multi-objective algorithms supported by region-based selection methods, such as the Pareto Envelope-based Selection Algorithm (PESA) (Knowles and Corne, 2000; Corne et al., 2001). Nowadays, the most prevalent multi-objective evolutionary algorithms are Multi-Objective Genetic Algorithm (Fonseca and Fleming, 1993), Non-Dominated Sorting Genetic Algorithm (Deb and Jain, 2013), Classic and Intelligent Portfolio Optimization (Vedarajan et al., 1997), Multi-Objective Evolutionary Algorithm Based on Decomposition (Zhang and Li, 2007), and Multi-Objective Particle Swarm Optimization (MOPSO) (CoelloCoello and Lechuga, 2002). Among the multi-objective optimization algorithms, MOPSO has the potential to effectively solve complex engineering problems because it utilizes a small number of starting populations and geographically-based adaptive grids (e.g., PESA (Corne et al., 2001)) to maintain the diversity of solutions.
Optimization for the design or retrofit of systems with dampers has been of interest to engineers and researchers in recent years. In 2014, Castaldo and De Iuliis (Castaldo and De Iuliis, 2014) proposed an integrated optimal seismic design procedure to achieve a design displacement by minimizing a cost index that is a function of elastic and viscoelastic design variables. In 2016, Pollini et al. (Pollini et al., 2016) presented an effective method for minimizing the retrofit costs of viscous dampers by setting a constraint on inter-story drifts. In 2018, Altieri et al. (Altieri et al., 2018) proposed a reliability-based approach that considered the intensity of the seismic inputs to find the optimal solution of the damping coefficients and the velocity exponents for dampers located on different floors of the building while minimizing the sum of the damper forces. Furthermore, in 2018, Wang and Mahin (Wang and Mahin, 2018b) proposed an automated retrofit method with viscous dampers, which utilized a single-objective function within the gradient-based optimization algorithm available in computational software OpenSees (McKenna and Fenves, 2004). In 2019 and 2020, Aydin et al. (Aydin et al., 2019a; Aydin et al., 2019b; Aydin et al., 2020) and Cetin et al. (Cetin et al., 2019) conducted a series of studies that proposed optimal design and distribution of dampers for shear building structures with fixed support and with the consideration of the soil-structure interaction.
While most of the optimization techniques for damped moment frames used in the past are based on a single-objective function and locally optimized solutions, the seismic performance of buildings with dampers mostly depends on conflicting structural responses (e.g., inter-story drifts and floor accelerations). To find an optimal design solution that meets desired performance objectives, it is necessary to use multi-objective algorithms capable of finding a globally optimal solution set. While Genetic Algorithms can be used for multi-objective optimization, they typically require a large population size to find the global minimum, resulting in a long computation time. In comparison, the MOPSO algorithm is more computationally efficient as it requires a relatively small number of starting populations to find a global minimum while avoiding trapping in the local optimal solutions.
This research investigates the robustness and efficiency of the multi-objective metaheuristic optimization algorithm MOPSO when used in the design of viscous dampers for seismic applications. In support of the research context, an overview of MOPSO is first presented. Subsequently, the research proposes two extensions of MOPSO for use in complex engineering problems. The extensions include two new environments for 1) introduction of different types of constraints on objective (cost) functions and 2) implementation of parallel computing to improve the efficiency and quality of the solution set. Additionally, the research provides recommendations on how to efficiently generate reliable solution sets by proper selection of objective (cost) functions and adequate set-up of MOPSO input parameters. These recommendations are derived from a series of sensitivity studies. Finally, the proposed strategy for utilizing MOPSO in seismic design applications is verified by utilizing an engineered solution of a viscously damped moment frame.
Overview of MOPSO
The original particle swarm optimization (PSO) (Kennedy and Eberhart, 1995), inspired by the choreography of the flocking of birds, is successfully used for solving single-objective optimization problems. To find an optimal solution, the algorithm performs a multidimensional search, where the behavior of each individual (i.e., particle) is affected by either the best local or best global individual. The approach allows individuals to benefit from their experience and introduces the use of flying potential solutions through hyperspace to accelerate convergence. Coello and Lechuga (CoelloCoello and Lechuga, 2002) have proposed an extension of PSO to allow for multi-objective optimization and named it “multi-objective particle swarm optimization” (MOPSO). Their approach uses the concept of Pareto dominance to determine the flight direction of a particle and establishes a global repository (an external memory) to deposit previously found non-dominated position vectors, which will be used by other particles in the next flying cycle (i.e. iteration) to guide their flight. Additionally, the updates to the repository are performed considering geographically-based adaptive grids to preserve the diversity of solutions (i.e., diversity of objective function values associated with each particle).
Pareto dominance is a concept implemented in optimization practices to determine whether a certain condition or set of conditions is more desirable in the current iteration than in the previous one. If the current set of conditions does not worsen any of the outcomes and also improves at least one of the outcomes, then it is said to dominate the previous conditions. This same process leads to the creation of a Pareto front, a set of solutions to an optimization problem where no individual solution is entirely better than any other of the solutions in the set (Reyes-Sierra and CoelloCoello, 2006). In MOPSO, nondominated outcomes of each iteration are stored in the repository and are compared to subsequent iterations’ outcomes (CoelloCoello and Lechuga, 2002). Because MOPSO is a process meant to optimize several interrelated, and often conflicting, variables, the concept of Pareto dominance is very important.
Although there are many ways to adapt MOPSO (Reyes-Sierra and CoelloCoello, 2006), the logic of the algorithm typically includes the following elements:
Problem definition
1) Define decision variables.
2) Define the size of the search space (upper and lower bounds for the decision variables).
3) Define objective (cost) functions; costs must be the function of decision variables.
MOPSO input parameters selection
1) Set the number of particles in the swarm (i.e., population size),
2) Define the repository size (i.e., number of nondominated particles that can be stored),
3) Set the maximum number of flying cycles (i.e., number of iterations),
4) Set parameters that define the criteria for the selection of the new position. These include: inertia weight (
Problem initialization
1) Initialize the population by arranging the particles randomly within a search space. The particle
2) Initialize the speed of each particle by setting it to zero,
3) Evaluate the costs (objective function values) for each of the particles in the swarm.
4) Initialize the repository and store the positions of particles that represent nondominated vector solutions in the repository.
5) Generate hypercubes (or grids) of the search space and locate particles using these hypercubes as a coordinate system where each particle’s coordinates are defined based on their costs (objective function values).
6) For each particle initialize the best personal position,
MOPSO main loop
For each iteration (i.e., flying cycle) and each particle in the swarm do the following:
1) Use roulette wheel selection to choose the leader among nondominated particles.Position of the leader is designated as the global best position,
2) For iteration
where
3) Compute the new positions of the particles by adding new speed to the position of the last cycle using Eq. 2:
4) Maintain particles in the search space in case they go beyond the boundaries.
5) Evaluate objective functions for each of the particles in the swarm.
6) Update the contents of repository (positions of nondominated particles) together with the geographical representation of the particles within the hypercubes (or grids).
7) Use Pareto dominance to decide whether the current position of the particle is better than the personal best from the previous cycle. If the personal best position from the previous cycle is dominated by the new position, the personal best position is updated using Eq. 3, and stored in the repository. Otherwise, the repository keeps the old value.
Note that the relationship structure between particles (i.e., neighborhood topology) presented here is one of many possible topologies that can be used within MOPSO. Other possible adoptions include but are not limited to: specifying bounds for the velocity of a particle; establishing constraints for objective functions; use of constriction coefficients (Clerc and Kennedy, 2002) to calculate the search parameters. Given its flexibility and robustness, MOPSO can be expanded to allow the tackling of new types of optimization problems.
Adoption of MOPSO for the optimal design of dampers
The focal point of the research is the evaluation and adoption of the MOPSO algorithm for use in finding an optimal design solution set for dampers in the seismic application. A three-story building with viscously damped moment frames (VDMFs) located at the building perimeter was utilized in support of this study. The moment frames of VDMFs conform to the strength requirements of ASCE 7–16; they were designed for 0.75% of the seismic base shear, which was based on the strength reduction factor (R) of 8. In this optimization problem, damping coefficients of dampers are selected to be the only design (i.e., decision) variables to provide an initial insight into the usability of MOPSO in seismic applications (see VDMF Configuration and Modeling Section for more details). The other damper’s properties, stiffness and velocity exponent, are adopted from the engineered design solution (Terzic and Mahin, 2017) and take values of 2000 kips/in. and 0.5, respectively. The main objective of this optimization problem is the selection of damping coefficients that will yield benefits in terms of seismic performance and/or construction cost. The main objective functions include dampers’ forces and global structural responses that are directly tied to performance (interstory drifts, floor accelerations, and residual drifts; typically referred to as engineering demand parameters, EDPs).
VDMF configuration and modeling
VDMFs of a three-story steel office building had six bays with a spacing of 30 ft, a typical story height of 15 ft, and a first story height of 17 ft (Figure 1). The site soil class was D, with shear wave velocity of 180–360 m/s. The building was located in Los Angeles at a site characterized by spectral accelerations of Ss = 2.2 g (for short period) and S1 = 0.74 g (for a period of 1s). The building was modeled in OpenSees (McKenna and Fenves, 2004) by Terzic and Mahin (Terzic and Mahin, 2017) with viscous dampers modeled utilizing Maxwell model (linear spring and nonlinear dashpot in series). It is to be noted that dampers of VDMF were originally designed by Miyamoto International, Inc. with the design objective to limit the interstory drifts at the design level earthquake to 1%. To meet the imposed requirement, dampers had viscous damping of 135 kip/(in./sec)0.5 at the first two stories (designated as C12) and 35 kip/(in./sec)0.5 at the third story (designated as C3). It is known that damping coefficients of dampers have a significant effect on structural response (Terzic and Mahin, 2017) and are therefore selected as design (decision) variables in this optimization study. The search space is defined as follows: C12 range is set to 120–160 kip/(in./sec)0.5 and the C3 range is set to 20–60 kip/(in./sec)0.5. Note that the selected ranges of damping coefficients include the design solution.
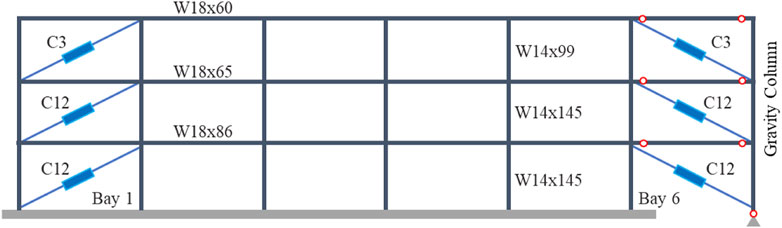
FIGURE 1. Configuration of the VDMF.
Optimization method
As a starting point, the research utilizes Yarpiz’s adoption of MOPSO (Yarpiz), with its implementation in MATLAB. This adoption incorporates the Pareto Envelope and the grid-making technique to find nondominated solutions and select the leader. New input parameters include: density of the search space (
Yarpiz’s adoption of MOPSO is further expanded by introducing constraints on objective functions and by allowing parallel computing. Figure 2 displays the general flowchart used for the proposed optimization method. The design optimization process starts by setting the design constraints, MOPSO input parameters, objective functions, design (i.e., decision) variables, and the search space. To achieve the desired performance, the constraints are assigned to three main EDPs: interstory drifts, floor accelerations, and residual drifts. In the next step, a set of design individuals (i.e., particles) is randomly generated within the feasible range of design variables (i.e., the search space). Then, for each design alternative, a nonlinear analytical model is created in the finite element software OpenSees (McKenna and Fenves, 2004) and the response analysis is performed on the model. In the present study, time history analysis is used to evaluate the EDPs. Upon evaluating the structural responses, the predefined constraints on EDPs are checked. For each design alternative, if the constraints are not met, a new design alternative is generated, and the evaluation of structural response is repeated. When the design constraints for all alternatives are met, the stopping criteria of the optimization algorithm are checked. If the stopping conditions are not met, a new set of design individuals is generated using the operators of the MOPSO algorithm, and the response analysis is repeated for each new design individual. In this study, the stopping condition is defined with the maximum number of iterations. The optimization process continues until the number of iterations reaches the predefined maximum value.
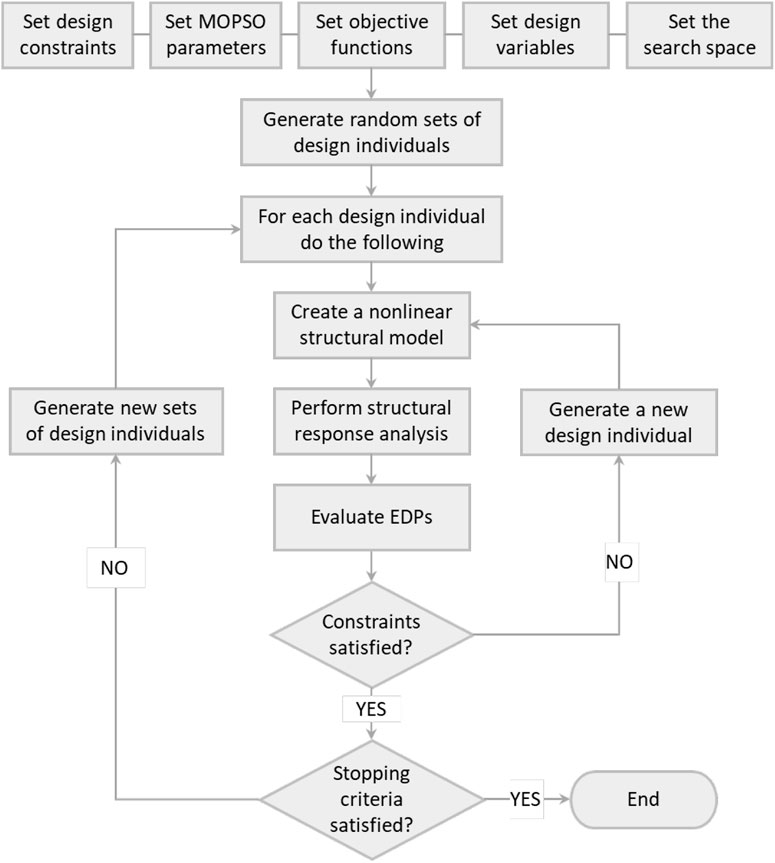
FIGURE 2. Flowchart of the proposed adoption of MOPSO.
In our adoption of MOPSO, MATLAB was used as an interface to facilitate workflow between OpenSees and MOPSO. To be computationally efficient, simulations are performed utilizing parallel computing options in MATLAB, allowing for simultaneous objective function evaluations for all design individuals in one iteration (i.e., flaying cycle). The codes that facilitate our adaptation of MOPSO are publicly available (Baei, 2019).
Sensitivity study
To properly adopt the MOPSO algorithm for use in complex engineering problems, this research explores the sensitivity of an optimal solution set to: 1) definition of objective (i.e., cost): functions and 2) choice of three major MOPSO input parameters: density of the search space (
To provide content to the study, the sensitivity tests are conducted considering a strong ground motion representative of an earthquake with 2% probability of exceedance in 50 years under the following constraints: “maximum” interstory drift (mISD) limit of 2%, “maximum” floor acceleration (mFA) limit of 0.85g, and “maximum” residual interstory drift (mRISD) limit of 0.5%. Within the context of this study, the “maximum” response represents the maximum of peak responses across all building floors/stories attained during an earthquake. Similarly, the “average” response will refer to the average of the peak responses.
The ground motion utilized for the sensitivity study is El Centro ground motion (NGA record number 6 within PEER ground motion database (Pacific Earthquake Engineering Research Center, 2013)), scaled 3.63 times to represent very high seismic hazard for the considered site; it is representative of an earthquake with 2% probability of exceedance in 50 years. The acceleration time history of the scaled ground motion is displayed in Figure 3.
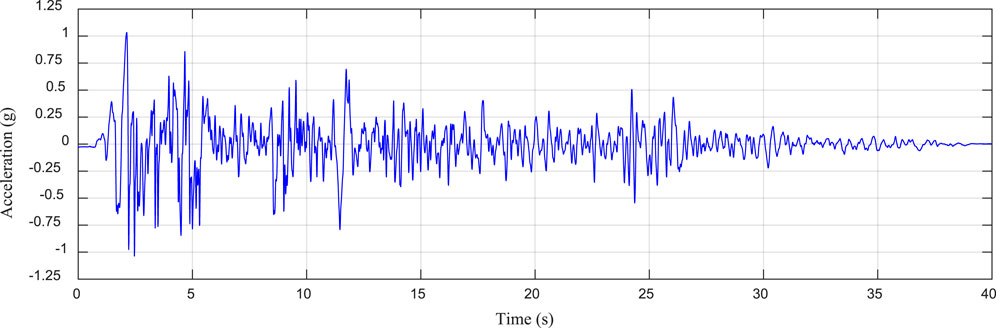
FIGURE 3. Acceleration time history of the selected ground motion (scaled).
Effect of cost functions on the diversity of the solution set
This section explores the effect of the selected cost (objective) function on the quality of the solution set, under the selected set of constraints. In this sensitivity test, the three major MOPSO input parameters are maintained constant with the following values:
Set 1: combination of “maximum” global structural responses (mISD, mFA, mRISD),
Set 2: combination of “maximum” global structural responses and dampers’ forces (evaluated indirectly by considering damping coefficients) (mISD, mFA, mRISD, C12, C3), and.
Set 3: Set 2 expended with a linear combination of dampers’ forces (mISD, mFA, mRISD, C12, C3, C12 + C3).
For the established cost function sets, Figure 4 compares different design variable outcomes. Runtimes for the three sets were similar and ranged from 4.06 h (for set 1) to 4.52 h (for set 3). The presented results show that cost functions that only consider global structural responses (left figure) provide a set of design variables (repositories of MOPSO) that are concentrated at the upper-right corner of the search space (higher end of the range of damping coefficients). Attained solutions may yield non-optimal design of dampers as there are possible deviant values in relation to other cost functions not considered in this initial cost function set. This was a motivation for exploring additional cost function sets. It was found that consideration of dampers’ forces (i.e., damping coefficients) as cost functions in addition to the global structural responses (shown in the middle figure) diversifies the solution set. Furthermore, adding a linear combination of dampers’ forces to the previous set of cost functions (shown in the right figure) provides an additional benefit, as it further improves the diversity of the solution set by evening up the optimization benefits across the building height. Due to its superiority, this final cost function set (Set 3) is selected for further use in sensitivity studies that follow. Presented results also exemplify that cost functions typically used by the research community, which include only drift, only damping coefficients, or combination of drift and acceleration, would not generate optimized solutions utilizing MOPSO. Finally, it is to be noted that while significant improvement in the diversity of the solution outcomes is achieved through the selection of the cost function, there is a potential for further improvements by altering the three major MOPSO parameters.
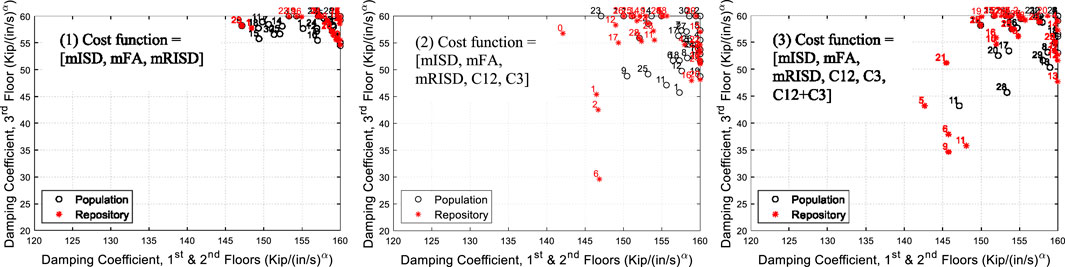
FIGURE 4. Effect of selected cost functions on the design variable sets (
Effect of major MOPSO input parameters on the diversity of the solution set
Previously, Thomas (Thomas, 2018) investigated the effect of different MOPSO input parameters on the quality of solution outcomes of an SDOF system subjected to an earthquake. It was reported that population size, the density of the search space, and the number of iterations had a particularly significant impact on solutions. Therefore, these MOPSO parameters will be altered to highlight their effect on solution outcomes in the case of nonlinear structural behavior. Cost function Set 3 (introduced in Effect of Cost Functions on the Diversity of the Solution Set Section) will be used in support of this sensitivity study. It is to be noted that in this adoption of the MOPSO, number of iterations is the only MOPSO parameter that has a significant effect on computation time.
The effect of density of the search space,
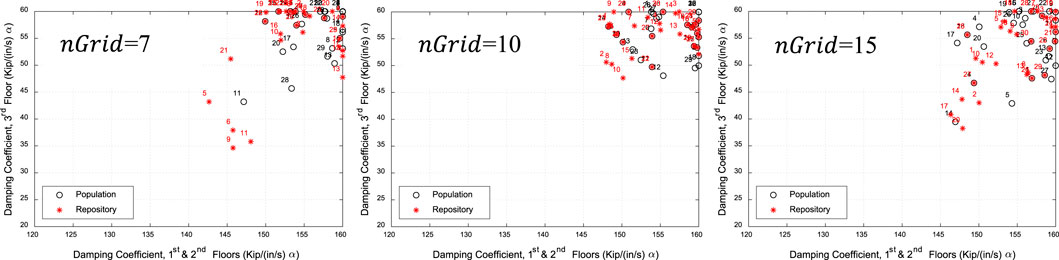
FIGURE 5. Effect of density of search space,
The effect of population (swarm) size,
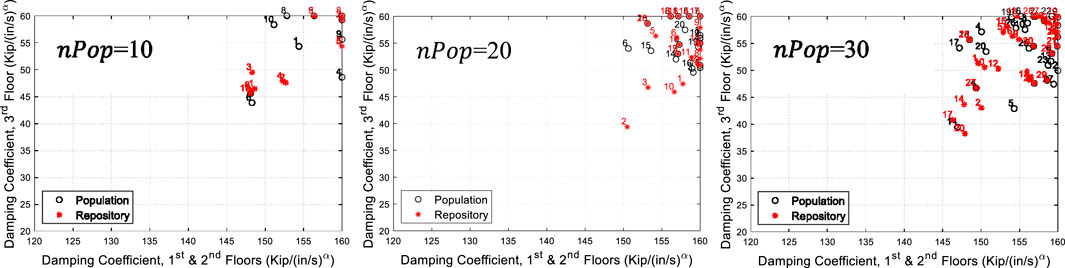
FIGURE 6. Effect of the number of particles in population,
The last MOPSO parameter explored herein is the number of iterations (i.e., flying cycles),
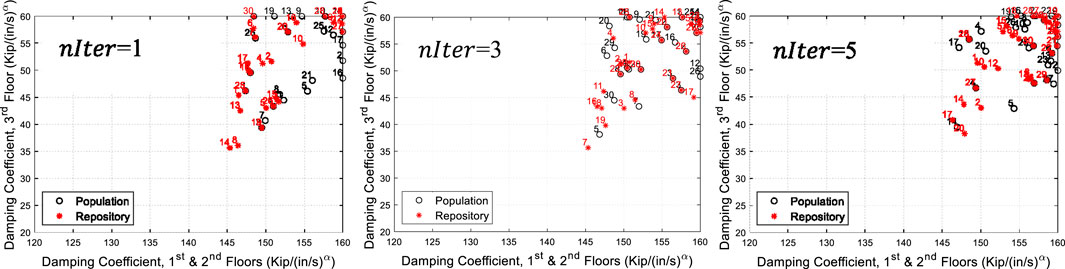
FIGURE 7. MOPSO design variable outcomes for different number of considered iterations,
Comparison of solution outcomes when “maximum” or “average” of an EDP is used in a cost function
Building on the results of sensitivity studies presented in Effect of Cost Functions on the Diversity of the Solution Set Section and Effect of Major MOPSO Input Parameters on the Diversity of the Solution Set, this section shows the effect of the choice of response measure (“maximum” or “average”) in the cost function on the MOPSO solution set. Meanings of “maximum” and “average” responses are next explained with an example. For instance, “maximum” ISD is the maximum of peak ISDs from all stories, where peak ISD of one story represents maximum ISD (in the absolute sense) attained at that story during the considered earthquake. Similarly, “average” ISD is the average of peak ISDs.
Figure 8 shows design variable outcomes across the search space for the two considered choices of response measure in the cost function, “maximum” (left figure) and “average” (right figure). In both cases, the design variable outcomes fall within the same area of the search space following a similar pattern; however, the outcomes associated with “maximum” response measures are less dense. Furthermore, Figure 9 compares Pareto fronts of FAs and ISDs for the two choices of response measures by illustrating “minimum”, “average”, and “maximum” responses for each particle in the repository. Both choices result in the same pattern of Pareto fronts, where the choice of the “maximum” response measure in cost function generates a wider range of solutions as a result of a higher diversity of design variable outcomes.
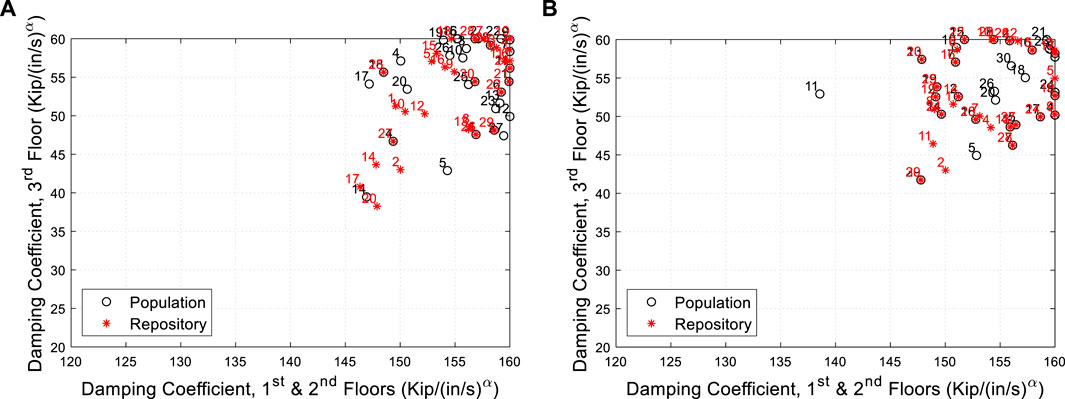
FIGURE 8. MOPSO design variable outcomes when: (A) “maximum” of an EDP is used as the cost function, (B) “average” of an EDP is used as the cost function.
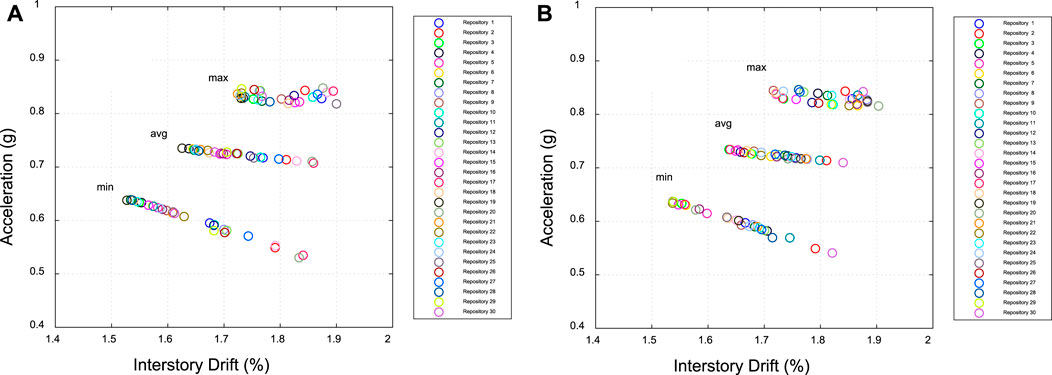
FIGURE 9. Pareto fronts of minima, averages, and maxima of peak responses (i.e., floor accelerations and interstory drifts) across all building floors/stories for the cases where: (A) “maximum” of an EDP is used in cost function, (B) “average” of an EDP is used in cost function.
The sensitivity study presented in this section provides recommendations on how to implement MOPSO for the optimal design of dampers in a VDMF. It demonstrates the importance of the proper selection of cost functions, the density of the search space, population size, and the number of iterations. It further shows that in the case of a 3-story building, the MOPSO solution set is not very sensitive to the choice of “maximum” or “average” EDP in the cost function. While this paper presents MOPSO results where design variable ranges are somewhat narrow, Baei (Baei, 2019) shows that MOPSO provides an equally good solution set for much wider ranges of design variables. However, it is noted that the required computation time increases with the increase in the size of the search space.
Verification of the proposed MOPSO framework for VDMF
The benefits of the proposed optimization framework are presented through a verification study that is based on comparing the MOPSO solution set with the engineered design solution (described in Sensitivity Study Section). Both, MOPSO and an engineered solution are derived considering the set of three spectrally matched ground motions. The pseudo-acceleration response spectra of the considered ground motions along with the designed spectrum are shown in Figure 10. Response history analysis of engineered VDMF subjected to three selected ground motions generated the maximum interstory drift of 0.99%, maximum floor acceleration of 0.48g, and maximum residual interstory drift of 0.18%. To assure optimal design solution with MOPSO, the following constraints were utilized: 1.2% for interstory drifts, 0.5 g for floor accelerations, and 0.2% for residual interstory drifts.
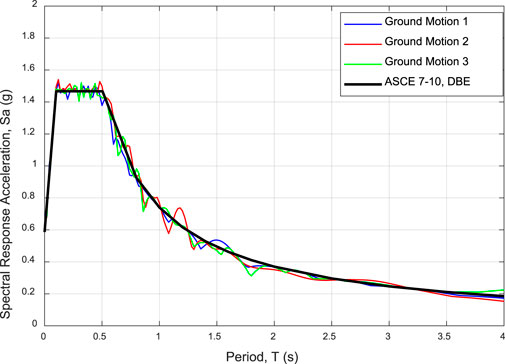
FIGURE 10. The design spectra, and ground motions selected for the designed VDMF.
The MOPSO parameters utilized for finding the set of optimal solutions stem from sensitivity studies presented in Sensitivity Study Section and take the following values:
Figure 11A shows Pareto front in terms of “maximum” damper stroke and “maximum” floor acceleration. Under the given set of constraints, floor accelerations almost linearly decrease with the increase of the stroke. To accommodate the constraints (1.2% on interstory drifts and 0.5 g on floor accelerations), maximum stroke ranges from 1.45 in. to 2.1 in. while maximum floor acceleration ranges from 0.42 g to 0.49 g. Furthermore, Figure 11B shows that the maximum force of dampers located on the first two stories is generally greater than that of the third story. This implies larger damping coefficients for the bottom two stories than for the third story.
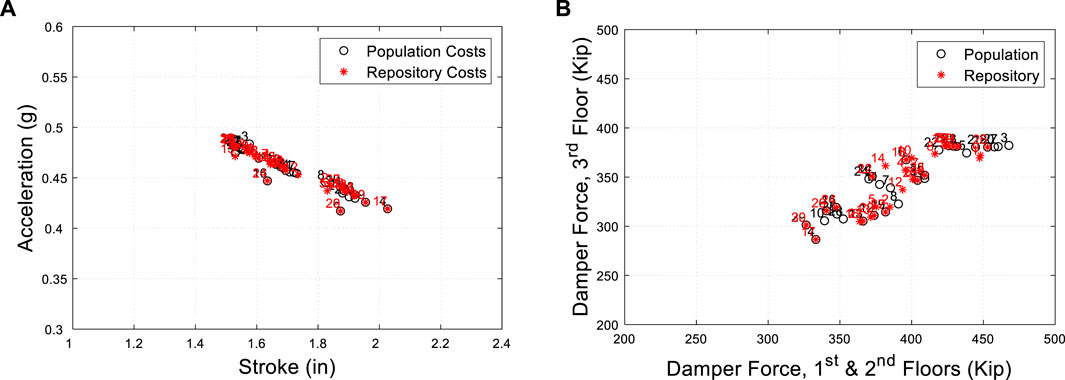
FIGURE 11. (A) Pareto front (“maximum” damper stroke vs.“maximum” floor acceleration) and (B) dampers’ forces.
The profiles of maximum forces and strokes of dampers are shown in Figure 12 for all particles in the repository, along with the profiles of the engineered solution (black dashed line). By investigating MOPSO solutions, it was found that particle #3 (black solid line in Figure 12), generates slightly smaller ISDs, FAs, and RISDs (up to 3%) than the engineered solution while producing smaller demands on dampers; it has about 20% smaller damper force demand and about 10% smaller stroke demand. Damping coefficients associated with particle #3 are 134.5 kip/(in./sec)0.5 and 42.39 kip/(in./sec)0.5 for C12 and C3, respectively. While C12 is approximately the same as the engineered solution (135 kip/(in./sec)0.5), C3 is 20% higher than the engineered solution (35 kip/(in./sec)0.5). To conclude, it is to be stressed that achieved reduction in damper demands, while maintaining EDP responses, translates into construction savings as a result of reduced manufacturing cost of dampers. Furthermore, particle #8 (red solid line in Figure 12) with C12 of 131 kip/(in./sec)0.5 and C3 of 43 kip/(in./sec)0.5, produces similar demands on dampers as the engineered solution, while reducing “maximum” ISDs by 15%. This implies better seismic performance at the same construction cost. These examples clearly demonstrate the power, robustness, and efficiency of MOPSO in seismic applications.
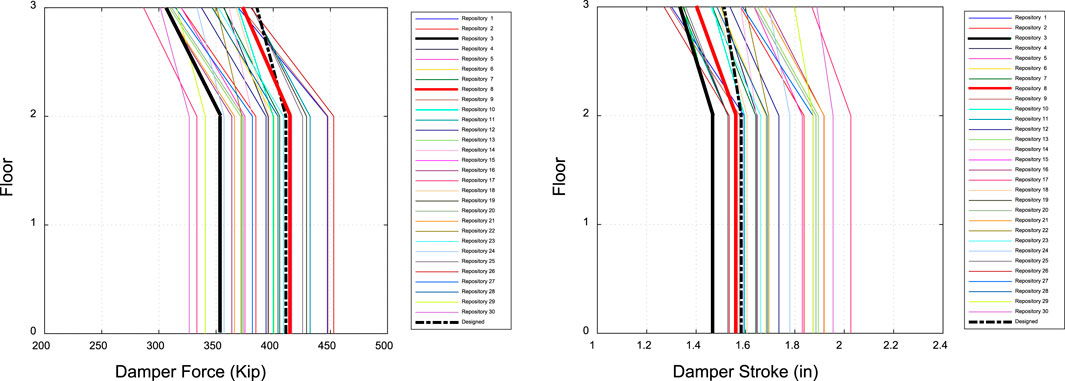
FIGURE 12. Dampers’ forces and strokes for MOPSO (original VDMF design - black dashed line; repository 3—thick black line; repository 8 - tick red line).
Summary and conclusion
This research focuses on the optimization of viscous dampers for seismic applications utilizing the multi-objective particle swarm optimization (MOPSO) algorithm. MOPSO with its inherent metaheuristic approach and geographically-based adaptive grids avoids trapping in the local optimal solutions and is effective in discovering diverse non-convex solutions. To further improve the efficiency of the search considering an engineering application, MOPSO is extended by applying constraints on objective functions and by allowing for parallel computing.
The research provides recommendations on how to adequately use MOPSO to generate a reliable solution set in seismic applications. Special emphasis is placed on the definition of objective functions, set up of MOPSO input parameters, and parallel computing utilizing high-performance computing resources. The presented study reveals that cost functions that only contain EDPs generate locally optimized solutions, while consideration of EDPs along with dampers’ forces and their linear combination improves the solution set. Furthermore, the study highlights the importance of proper setup of MOPSO parameters (density of the search space, population size, and the number of iterations) and demonstrates their effect on the solution outcomes through sensitivity studies. The proposed MOPSO adoption for the design of dampers in the seismic application is verified through a comparison of the MOPSO solution set with an engineered design solution. It was found that the MOPSO solution set contains outcomes that reduce damper demands (force and stroke) by 10–20% relative to the engineered solution while maintaining comparable EDP responses. This translates into construction savings as a result of the reduced manufacturing cost of dampers. Additionally, the MOPSO solution set contains the outcomes that reduce “maximum” ISDs by 15%, while generating similar demands on dampers as the engineered solution. This implies better seismic performance at the same construction cost, demonstrating the power and efficiency of MOPSO in seismic applications.
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
VT: Conceptualization, Methodology, Supervision, Funding Acquisition, Software, Writing, Visualization. MB: Investigation, Methodology, Software, Visualization.
Funding
This work was supported by the California State University Long Beach RSCA award.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Altieri, D., Tubaldi, E., De Angelis, M., Patelli, E., and Dall’Asta, A. (2018). Reliability-based optimal design of nonlinear viscous dampers for the seismic protection of structural systems. Bull. Earthq. Eng. 16 (2), 963–982. doi:10.1007/s10518-017-0233-4
Aydin, E., Farsangi, E. N., Ozturk, B., Bogdanovic, A., and Dutkiewicz, M. (2019). Improvement of building resilience by viscous dampers. Resilient structures and infrastructure. Singapore: Springer, 105–127. doi:10.1007/978-981-13-7446-3_4
Aydin, E., Ozturk, B., Bogdanovic, A., and Farsangi, E. N. (2020). Influence of soil-structure interaction (SSI) on optimal design of passive damping devices. Structures 28, 847–862. doi:10.1016/j.istruc.2020.09.028
Aydin, E., Ozturk, B., and Dutkiewicz, M. (2019). Analysis of efficiency of passive dampers in multistorey buildings. J. Sound Vib. 439, 17–28. doi:10.1016/j.jsv.2018.09.031
Baei, M. (2019). Optimization of dampers in viscously damped moment frames utilizing MOPSO. Long Beach: Master Thesis, California State University.
Castaldo, P., and De Iuliis, M. (2014). Optimal integrated seismic design of structural and viscoelastic bracing-damper systems. Earthq. Eng. Struct. Dyn. 43 (12), 1809–1827. doi:10.1002/eqe.2425
Cetin, H., Aydin, E., and Ozturk, B. (2019). Optimal design and distribution of viscous dampers for shear building structures under seismic excitations. Front. Built Environ. 5, 90. doi:10.3389/fbuil.2019.00090
Clerc, M., and Kennedy, J. (2002). The particle swarm - explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 3 (1), 58–73. doi:10.1109/4235.985692
Coello Coello, C., and Lechuga, M. S. “MOPSO: A proposal for multiple objective particle swarm optimization,” in May 2002Proceedings of the Congress on Evolutionary Computation, Honolulu, HI, USA (IEEE).
Corne, D. W., Jerram, N. R., Knowles, J. D., and Oates, M. J. “PESA-II: Region-based selection in evolutionary multiobjective optimization,” in Proceedings of the 3rd Annual Conference on Genetic and Evolutionary Computation, July 2001 (Morgan Kaufmann Publishers Inc).
Deb, K., and Jain, H. (2013). An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: solving problems with box constraints. IEEE Trans. Evol. Comput. 18 (4), 577–601. doi:10.1109/tevc.2013.2281535
Del Gobbo, G. M., Williams, M. S., and Blakeborough, A. (2018). Comparing fluid viscous damper placement methods considering total-building seismic performance. Earthq. Eng. Struct. Dyn. 47 (14), 2864–2886. doi:10.1002/eqe.3117
Fonseca, C. M., and Fleming, P. J. “Genetic algorithms for multiobjective optimization: Formulation, discussion and generalization,” in Proceedings of the 5th International Conference on Genetic Algorithms, San Mateo, CA, 1993.
Holland, J. H. (1975). Adaptation in Natural and Artificial systems. Ann Arbor, Michigan: University of Michigan Press. re-issued by MIT Press (1992).
Kennedy, J., and Eberhart, R. “Particle swarm optimization,” in Proceedings of the . IEEE International Conference on Neural Networks, Perth, Australia, November 1995 (IEEE).
Knowles, J. D., and Corne, D. W. (2000). Approximating the nondominated front using the Pareto archived evolution strategy. Evol. Comput. 8 (2), 149–172. doi:10.1162/106365600568167
McKenna, F., and Fenves, G. L. (2004). Open system for earthquake engineering simulation (OpenSees). Berkeley, CA: PEER, University of California.
Pacific Earthquake Engineering Research Center (2013). PEER NGA-West2 strong ground motion database.
Pollini, N., Lavan, O., and Amir, O. (2016). Towards realistic minimum-cost optimization of viscous fluid dampers for seismic retrofitting. Bull. Earthq. Eng. 14 (3), 971–998. doi:10.1007/s10518-015-9844-9
Reyes-Sierra, M., and Coello Coello, C. (2006). Multi-objective particle swarm Optimizers: A Survey of the state-of-the-Art. Int. J. Comput. Intell. Res. 2 (3), 287–308. doi:10.5019/j.ijcir.2006.68
Terzic, V., Mahin, S. A., and Comerio, M. C. “Comparative life-cycle cost and performance analysis of structural systems for buildings,” in Proceedings of the 10th National Conference in Earthquake Engineering, Anchorage, AK, July 2014 (Earthquake Engineering Research Institute).
Terzic, V., and Mahin, S. A. (2017). Using PBEE to assess and improve performance of different structural systems for low-rise steel buildings. Int. J. Safe. 7 (4), 532–544. doi:10.2495/safe-v7-n4-532-544
Thomas, M. (2018). Computational efficiency of multi-objective particle swarm optimization considering a single degree of freedom system under earthquake loading. Long Beach: Thesis, California State University.
Vedarajan, G., Chan, L. C., and Goldberg, D. E. “Investment portfolio optimization using genetic algorithms,” in Late breaking papers at the genetic programming conference, California: Stanford Bookstore, 1997 (Stanford University).
Wang, S., and Mahin, S. A. (2018). High-performance computer-aided optimization of viscous dampers for improving the seismic performance of a tall building. Soil Dyn. Earthq. Eng. 113, 454–461. doi:10.1016/j.soildyn.2018.06.008
Wang, S., and Mahin, S. A. (2018). Seismic Upgrade of an existing tall building using different supplemental energy dissipation devices. J. Struct. Eng. (N. Y. N. Y). 144 (7), 04018091. doi:10.1061/(asce)st.1943-541x.0002094
Yarpiz Multi-objective PSO in MATLAB. Available at: https://yarpiz.com/59/ypea121-mopso.
Keywords: objective functions, constraint functions, pareto front, optimal design under constraints, input MOPSO parameters
Citation: Baei M and Terzic V (2022) Optimal design of dampers in seismic applications utilizing the MOPSO algorithm. Front. Built Environ. 8:1040129. doi: 10.3389/fbuil.2022.1040129
Received: 09 September 2022; Accepted: 20 September 2022;
Published: 13 October 2022.
Edited by:
Izuru Takewaki, Kyoto University, JapanReviewed by:
Baki Ozturk, Hacettepe University, TurkeySinan Melih Nigdeli, Istanbul University-Cerrahpasa, Turkey
Copyright © 2022 Baei and Terzic. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Vesna Terzic, dmVzbmEudGVyemljQGNzdWxiLmVkdQ==