 Nikolaos Tsokanas
Nikolaos Tsokanas Xujia Zhu
Xujia Zhu Giuseppe Abbiati
Giuseppe Abbiati Stefano Marelli
Stefano Marelli Bruno Sudret
Bruno Sudret Božidar Stojadinović
Božidar Stojadinović- 1Department of Civil, Environmental and Geomatic Engineering, Institute of Structural Engineering, ETH Zurich, Zurich, Switzerland
- 2Department of Civil and Architectural Engineering, University of Aarhus, Aarhus, Denmark
Hybrid simulation is an experimental method used to investigate the dynamic response of a reference prototype structure by decomposing it to physically-tested and numerically-simulated substructures. The latter substructures interact with each other in a real-time feedback loop and their coupling forms the hybrid model. In this study, we extend our previous work on metamodel-based sensitivity analysis of deterministic hybrid models to the practically more relevant case of stochastic hybrid models. The aim is to cover a more realistic situation where the physical substructure response is not deterministic, as nominally identical specimens are, in practice, never actually identical. A generalized lambda surrogate model recently developed by some of the authors is proposed to surrogate the hybrid model response, and Sobol’ sensitivity indices are computed for substructure quantity of interest response quantiles. Normally, several repetitions of every single sample of the inputs parameters would be required to replicate the response of a stochastic hybrid model. In this regard, a great advantage of the proposed framework is that the generalized lambda surrogate model does not require repeated evaluations of the same sample. The effectiveness of the proposed hybrid simulation global sensitivity analysis framework is demonstrated using an experiment.
1 Introduction
Hybrid simulation (HS) is used to investigate the experimental dynamic response of a structural component or sub-assembly subjected to a realistic loading scenario, which includes the dynamic interaction with a credible yet virtual structural system. Coupled physical and numerical substructures (PS and NS) form the so-called hybrid model. Specifically, the PS is tested using servo-controlled actuators provided with force transducers, while the NS is instantiated in a structural analysis software. A time-stepping analysis algorithm computes the hybrid model response on-the-fly. This ensures displacement compatibility and force balance between NS and PS throughout the entire experiment. Additionally, HS is used to investigate the inner workings of a structural component beyond the linear regime without testing an entire structural assembly. As a result, the cost of experimentation is substantially reduced. A report by Schellenberg and co-workers provides a comprehensive review of HS methods and algorithms (Schellenberg et al. (2009)).
In earthquake engineering, HS is the only viable solution for testing large structures (e.g., Abbiati et al. (2019); Moustafa and Mosalam (2015); Bas et al. (2020)). Similarly, HS has been recently proposed to test mooring lines of offshore structures for which hydrodynamic tests with sizeable scale are prohibitive (e.g., Sauder et al. (2018); Vilsen et al. (2019)). HS is gaining popularity for component-level testing in fire engineering. The reason is that internal force redistribution occurring at the system level heavily influences the failure modes at the component level (e.g., Abbiati et al. (2020)). More recently, HS has been combined with centrifuge testing for investigating soil-structure interaction problems (Idinyang et al. (2019)).
In all the cases reviewed above, NS and related excitation are conceived as deterministic. However, in the majority of cases encountered in structural engineering, loading is stochastic, while the boundary conditions are highly uncertain. An exhaustive exploration of all possible load cases is clearly not an option given the experimental cost associated with a single hybrid model evaluation. Accordingly, Abbiati et al. (2021) proposed surrogate modeling to compute the variance-based global sensitivity analysis (GSA) of the response quantity of interest (QoI) of a given hybrid model with respect to a set of input parameters that characterize both substructures and loading excitations. In detail, polynomial chaos expansion (PCE) was used to construct a surrogate model (a.k.a. response surface) of the hybrid model response. Sobol’ sensitivity indices of the QoIs were obtained as a by-product of polynomial coefficients as explained in Sudret (2008). The goal of such an approach was to reveal what influences what within the HS: This entails uncovering the inner workings of the PS, the unknown part of the hybrid model in both epistemic and aleatory sense. In that study, the PS was treated as deterministic, that is, aleatory uncertainty was neglected by assuming that nominally identical specimens have identical responses (plus some negligible measurement noise).
This assumption, however, is still far from a realistic scenario in structural testing. Nominally identical specimens are, in practice, never actually identical. Also, some sources of loading exerted through the PS are inherently stochastic (e.g., fire or hydrodynamic loading). As a result, uncertainty, both aleatory or epistemic, always affects the PS structural behavior.
This paper extends the GSA framework for HS proposed in Abbiati et al. (2021) to the case of PSs with non-deterministic behavior. Similar to the original framework, the idea is to surrogate the hybrid model response as a function of the input parameters that can be controlled by the experimenter and originate from substructures and loading (physical and numerical). However, latent variables that do not appear in the input parameter vector make the hybrid model response stochastic. To account for the latter, the generalized lambda model recently developed by Zhu and Sudret (2020), Zhu and Sudret (2021a) is used here to directly surrogate the probability density function (PDF) of the response QoI. This is achieved by means of the family of generalized lambda distributions, which are suitable to approximate a wide class of distributions commonly found in engineering contexts (Karian and Dudewicz (2000)). The parameters of the generalized lambda distributions are cast as functions of the input parameters of the hybrid model and approximated via PCE (Xiu and Karniadakis (2002); Blatman and Sudret (2011)). Normally, several repetitions of every single sample of the inputs parameters would be required to replicate the response of a stochastic hybrid model. However, acquiring such repetitions would be impossible in a HS. Instead, by using the generalized lambda model presented in Zhu and Sudret (2021a) we can solve this problem, as the generalized lambda model can be computed in a non-intrusive manner (i.e., the model is considered as a black-box) and does not require repeated HSs for a single sample of input parameters. For these reasons, the generalized lambda model is well-suited to surrogate the response of a stochastic hybrid model. Variance-based GSA is uniquely defined for deterministic simulators (Saltelli (2008)). In the context of stochastic simulators, three alternative variants of Sobol’ sensitivity indices are discussed in Zhu and Sudret (2021b), namely classical, quantile-based and trajectory-based Sobol’ indices. In this work, quantile-based Sobol’ indices are used for the GSA of the HS response QoI. The reasoning behind this selection is twofold: firstly the quantile functions of the QoI is more of interest for the presented case study as the QoI itself is stochastic; secondly computation of the classical and the trajectory-based Sobol’ indices (but not of the quantile-based) would require control of the latent variables. However, controlling the latent variables in data obtained from physical experiments is generally not possible.
The effectiveness of the proposed framework is demonstrated for a 3-degree of freedom (DoF) hybrid model subjected to mechanical and thermal loading. Specifically, thermal loading is experimentally exerted on the PS so that temperature fluctuations (out of control of the experimenter) entail a stochastic response of the hybrid model. It should be noted that the proposed framework handles the hybrid model as a black-box, and hence it can be applied to any dynamic system investigated via HS.
This paper is organized as follows. Section 2 introduces the generalized lambda model and describes the GSA framework for stochastic hybrid models. Section 3 presents the 3-DoF hybrid model used to test the framework. Section 4 discusses the results of the GSA of the stochastic hybrid model response. Finally, Section 5 presents the overall conclusions of this study.
2 Global Sensitivity Analysis Framework
Let a random variable vector
The latent variables z are grouped into a random vector Z. Note that with a fixed x and Z varying according to some probability distribution, the HS output Y(x) remains random.
The input parameters of the vector x are treated as random, modeled by known probability distributions and grouped into a random vector X = {X1, … , XM}. X is characterized by its joint distribution with the PDF denoted by fX. Furthermore, we assume that Xi’s are mutually independent, and thus the joint PDF is the product of marginal PDFs, i.e.,
For a given set of input parameters x, the QoI Y(x) is a random variable characterized by an unknown conditional probability distribution. Therefore, representing the stochastic behavior of a HS consists in estimating the response distribution for any parameters
The simplest surrogate model of a stochastic HS involves additive Gaussian noise:
To build such a surrogate, one needs to estimate the mean function h and the noise variance σ2. In this case, PCE (Xiu and Karniadakis (2002); Berveiller et al. (2006)) and Gaussian processes (Rasmussen and Williams (2006)) with a regression setup can be directly applied. However, Eq. 2 can be rather restrictive. To cover a wider group of problems, we choose to use the recently developed statistical model called the generalized lambda model (Zhu and Sudret (2020); Zhu and Sudret (2021a)).
2.1 Generalized Lambda Models
A generalized lambda model (GLAM) assumes that the probability distribution of the hybrid model response QoI Y(x) can be approximated by a generalized lambda distribution (GLD). The latter is a highly flexible four-parameter distribution family, which is able to approximate many common distributions such as normal, lognormal, uniform and extreme value distributions (Freimer et al. (1988)). A GLD is defined by its quantile function:
where u ∈ [0, 1] and λ = {λl: l = 1, … , 4} are the four distribution parameters. More precisely, λ1 is the location parameter, λ2 is the scaling parameter, and λ3 and λ4 are the shape parameters. To have valid quantile functions, λ2 should be positive. From Eq. 3, we can derive the associated PDF:
where
Under this setup, varying x will lead to Y(x) following a GLD with different distribution parameters λ. In other words, λl’s are functions of x, which allows us to express the QoI as:
Recall that the input parameters x are modelled as independent random variables X with joint PDF
where
To build a GLAM, we need to determine the associated coefficients c. To avoid the need for replications, which may result in a large number of experiments, we use the method developed by Zhu and Sudret (2021a). We first generate a set of realizations of the input random vector
where fGLD is the PDF of the GLD defined in Eq. 4. To solve the optimization problem, it is necessary to determine the support of c, which is equivalent to finding the truncation set
A great advantage of using the generalized lambda surrogate model presented in Zhu and Sudret (2021a) is that it does not require repeated replications of the same sample. The reason behind this feature is that GLAM works as a statistical model, imposing the shape of the response distribution and using a parametric form, namely the PCE, to represent the dependence of the distribution parameters on the input variables. The basis selection for λ1 and λ2 is performed in a data-driven manner (which allows us to detect potential heteroskedastic effects), whereas λ3 and λ4 are kept constant. If we use replications, information is rather concentrated on those replicated points. In contrast, when there are no replications, the training samples cover uniformly the design space and provide more “homogeneous” information.
2.2 Sobol’ Sensitivity Indices
Variance-based sensitivity analysis has been extensively studied and successfully developed in the context of deterministic models (Abbiati et al. (2021); Saltelli (2008)). For a random vector X with independent components, any deterministic mapping
where
where
Additionally, the definition in Eq. 10 allows for calculating the variance of
The Sobol’ index
For
Due to the random nature of stochastic simulators, decomposition similar to Eq. 9 is generally impossible. Therefore, it is necessary to represent a stochastic model by a deterministic function to obtain the associated Sobol’ indices. Based on the choice of the deterministic representation, we can have different extensions of the Sobol’ indices (Zhu and Sudret (2021b)).
The most straightforward way is to include the latent variables within the input variables (Iooss and Ribatet (2009)). This leads to the underlying (yet unknown in practice) deterministic model
As the definition of
Alternatively to Eq. 15, certain summary quantities of the response random variable Y(x) can be employed as a deterministic representation of Y(x). This is particularly helpful when the selected summary quantity itself is of interest. Typical quantities are mean
A generalized lambda surrogate model emulates the response distribution of a stochastic model, which fully captures the statistical dependence between the input variables X and the QoI Y. Therefore, such a surrogate allows for evaluating both types of Sobol’ indices mentioned above. More precisely, we can apply either Monte Carlo simulations or polynomial chaos expansions to the easy-to-evaluate emulator (see Zhu and Sudret (2021b) for more details).
Recall that the presented GSA framework assumes that the input parameters in x are statistically independent. Nevertheless, a generalized lambda surrogate model can emulate the response of a stochastic hybrid model even in the case of dependent input parameters (Zhu and Sudret, 2021a). This holds since the dependence of Y on the input parameters are not affected by the dependence within the input variables. Nevertheless, for the case of dependent input parameters, generalized Sobol’ indices or alternative variance-based sensitivity analysis methods should be employed as described in Chastaing et al. (2015); Marelli et al. (2019).
3 Experimental Illustration of the Proposed GSA Framework
3.1 Stochastic Hybrid Model
The proposed GSA framework is illustrated using a stochastic 3-DoF hybrid model subjected to both thermal and mechanical loading, illustrated in Figure 1. As can be appreciated from Figure 1A, the hybrid model consists of a simply-supported beam provided with rotational elastic restraints. In this regard, u1 and u2 indicate the two rotational DoF, while u3 is the axial DoF. Figure 1B describes the substructuring of the hybrid model into PS and NS. The NS comprises two elastic rotational restraints, an axial spring and a linear dashpot whereas the PS coincides with the beam element. Specifically, the axial spring is characterized by a constant stiffness of K3 = 8,100 × 103 N/m. Two lumped rotational masses are defined by J1 = J2 = 10 kgm2 while the lumped translational mass is defined by M3 = 5,000 kg. The linear dash-pot is characterized by C3 = 1,129 × 103 Ns/m. The PS consists of an aluminum plate of 0.2 × 0.002 m rectangular cross-section and length L = 0.47 m. Accordingly, the cross-section of the plate is characterized by an area A = 4 × 10−4 m2 and a moment of inertia I = 66.67 × 10−12 m4. The Young’s modulus, density and thermal expansion coefficient of aluminum are E = 69.5 GPa, ρ = 2,700 kg/m3, and α = 23 × 10−6°C−1, respectively. Since HS are conducted in pseudodynamic mode using a testing time scale equal to 50, the PS mass (rotational and translational) does not contribute to the hybrid model inertia. For the sake of clarity, all equations and plots in the following refer to simulation time, which is virtual and 50 times slower than the wall-clock time.
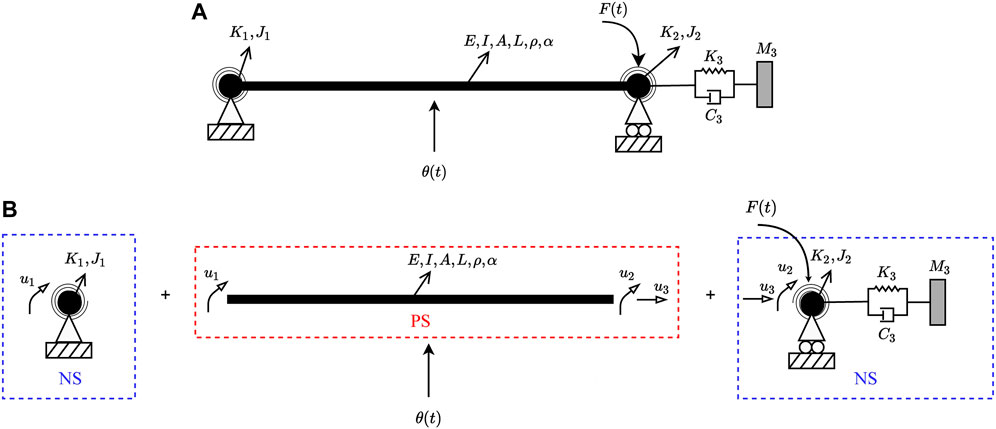
FIGURE 1. Reference structural system: (A) prototype structure and (B) its hybrid model.
Mechanical loading is supplied as a bending moment history F(t) applied to the right rotational DoF u2, while thermal loading, applied by a heating lamp, is defined by a ramp and hold temperature history θ(t). The expressions of both read:
where Fmax and T are peak value and period of the half-side bending moment pulse applied to DoF u2 with a time shift t0 = 0.1 s;
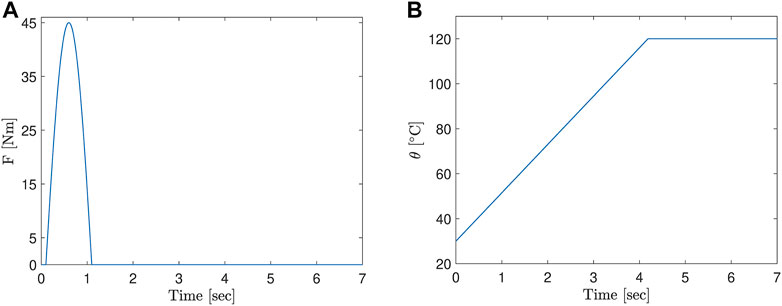
FIGURE 2. Sample time history loading: (A) bending moment history for Fmax = 45 Nm and T = 1 s; (B) temperature time history for θmax = 120°C.
Consistent with the motivations underlying the development of the GSA framework, the stiffness of the two elastic rotational springs, which play the role of boundary conditions to the PS, as well as the loading parameters, are selected as input parameters for the surrogate modeling phase. Recall that these parameters were chosen as inputs to the GSA framework, since in the majority of cases encountered in structural engineering, loading is stochastic, while the boundary conditions are highly uncertain. In line with the procedure described in Section 2, the input parameters are described by independent uniform distributions, whose bounds are summarized in Table 1.

TABLE 1. Input parameters of the hybrid model.
It is important to remark that, in order to reduce the experimental effort required to validate the proposed framework, the hybrid model and loading excitation were designed such that the PS always remained in the linear response regime. As a result, HS were conducted using a single aluminum plate.
The response QoI selected for the GSA corresponds to the maximum absolute out-of-plane deflection of the tested aluminum plate, which is denoted as uL,max.
3.2 Hybrid Simulation Setup
The 3-DoF HS test rig used to conduct HS is a stiff loading frame equipped with four electro-mechanical actuators and an infrared (IR) lamp module interfaced to an INDEL real-time computer (Abbiati et al. (2018)). The 3-DoF HS test rig is designed to test plate specimens with an approximate footprint of 200 × 500 mm and thickness varying between 1 and 3 mm. Figure 3 illustrates the architecture of the HS setup, including a close-up view of the plate specimen accommodation. Two axonometric views of the 3-DoF test rig, consisting of the main hardware components are shown in Figure 4.

FIGURE 3. Architecture of the 3-DoF HS test rig.
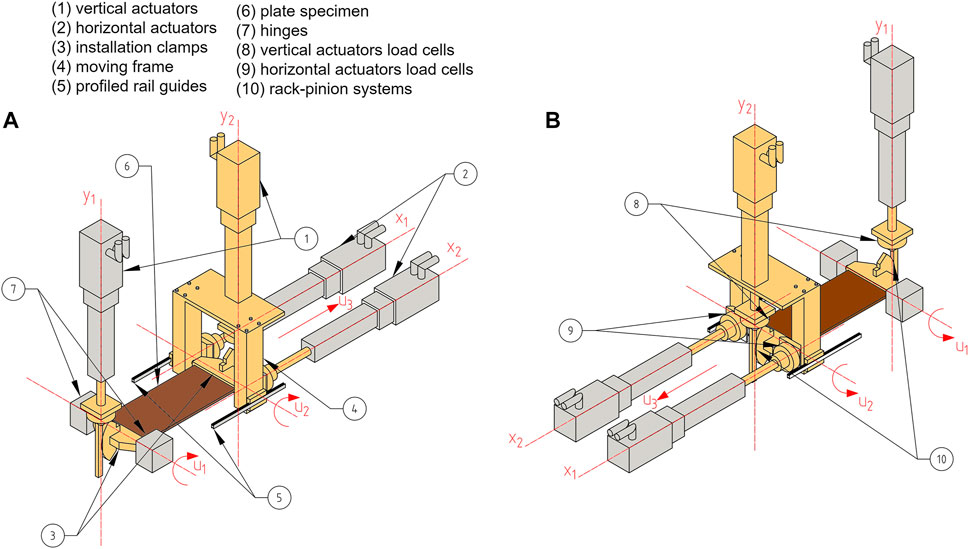
FIGURE 4. Axonometric views of the 3-DoF HS test rig with its main components (the moving parts are colored in yellow, the plate specimen is brown, while those parts fixed to the reaction frame are gray): (A) front and (B) back view perspective.
The moving parts of the test rig are colored in yellow, the plate specimen in brown and the fixed parts in gray. The latter are fixed to a reaction frame. In order to impose the u1 and u2 rotations, two rack-pinion systems (10) are installed along the vertical actuator y1 and y2 (1). The rack-pinion systems aim at transforming the commanded displacements from the actuators to rotational DoF, applied to the short edges of the plate specimen (6) through aluminum clamps (3). The two horizontal actuators x1 and x2 control the position of the moving frame mounted on profiled rail guides (4) and corresponding to the axial DoF u3 of the plate specimen (6). A linear variable differential transformer (LVDT) measures the out-of-plane deflection at the mid-span of the plate specimen (labeled uL in Figure 3). A Type K thermocouple installed at the center of the plate provides the feedback signal for the control of the IR lamp, which imposes the temperature history θ(t).
The GINLink bus connects the actuator servo-drivers INDEL stand-alone controllers (SAC4), the IR lamp and all the data acquisition (DAQ) modules to the real-time computer INDEL stand-alone master (SAM4), which executes the HS software. The latter is developed in MATLAB/SIMULINK, compiled, and downloaded to the INDEL SAM4 from the Host-PC. At each simulation time step, the HS software generates the temperature command for the IR lamp. The latter command is generated using a predefined time history temperature response (see, for example, Figure 2B). Also, at each time step of the simulation, the HS software imposes displacements u1, u2, and u3 to the plate specimen, the PS. The latter displacements are computed as the response of the NS to the imposed bending moment time history response (see, for example, Figure 2A). Using force transducers the HS software reads the corresponding restoring forces r1, r2, and r3, due to the imposed displacements and temperature commands, and uses them to solve the coupled equation of motion of the hybrid model. A comprehensive description of the time integration scheme used for HS is reported in Abbiati et al. (2019).
Forces were manually set to zero before starting the HS. An electric fan cools down the PS at the end of each test. Room temperature was quite stable and equal to 30°C, namely θ(0) = 30°C in Eq. 17, for the entire testing campaign.
4 Results and Discussion
The response of the hybrid model described in Section 3.1 was evaluated using the HS setup described in Section 3.2 on 200 samples of the input parameter vector generated using Latin hypercube sampling (Mckay et al. (2000)). The resulting ED X, Y was used for computing surrogate models. In a previous work of some of the authors (Abbiati et al. (2021)), 200 samples were proven to be adequate to train PCE surrogate models with acceptably small validation error. In particular, in that work, PCE estimates converged in trustworthy values with ED size larger than 50 samples. In this regard, 200 samples of the input parameter space were used in this study as well, as an initial estimate. Results presented later on demonstrate that this number of samples was sufficient to train the generalized lambda surrogate model.
Figure 5 reports out-of-plane and axial displacement histories obtained via HS for a single sample of input parameters, where uL,max, u3,max, uL,0, and u3,0 scalar quantities are highlighted. Specifically, uL,max corresponds to the QoI (see Eq. 18) and u3,max to the absolute maximum axial displacement while uL,0 and u3,0 indicate the initial position of the out-of-plane displacement and axial axes respectively, relative to the value measured during the first HS. Figure 6 describes the evolution of uL,0 and u3,0 scalar quantities over the entire experimental campaign.
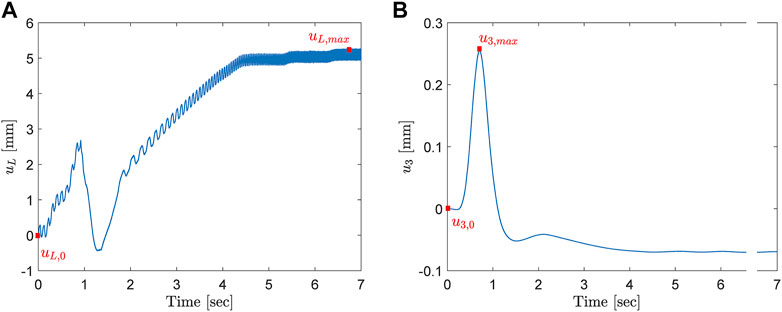
FIGURE 5. Time history response of the hybrid model with K1 = 224.454 Nm/rad, K2 = 118.235 Nm/rad, Fmax = 48 Nm, T = 0.618 s and θmax = 116.73°C: (A) out-of-plane displacement and (B) axial displacement.
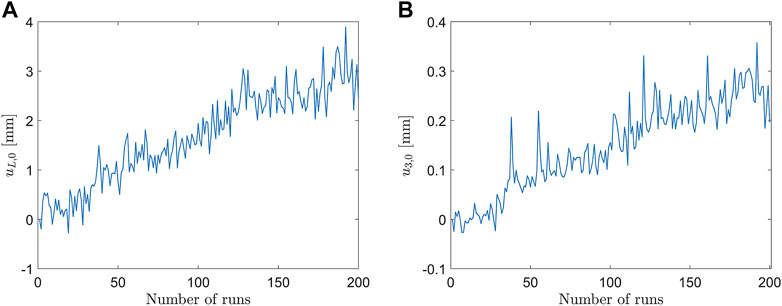
FIGURE 6. Drift in the hybrid model response: (A) uL and (B) u3.
4.1 Drift Observed in Measurement Data
From Figure 6 it is clear that both uL,0 and u3,0 quantities have a constant drift, which results in a total accumulated out-of-plane and axial displacements of 3.0 and 0.3 mm, respectively. Such a drift can be reasonably ascribed to the cumulative slippage of plate fixtures produced by heating/cooling cycles. This drift occurs regardless of the type of analysis that the HS setup was used for, and since the source of the drift is clear, it should be removed from the acquired raw data before any further post-processing. Accordingly, prior to the calculation of surrogate models, the effect of drift on uL,max was eliminated via linear detrending with respect to uL,0. The detrended QoI is referred to as
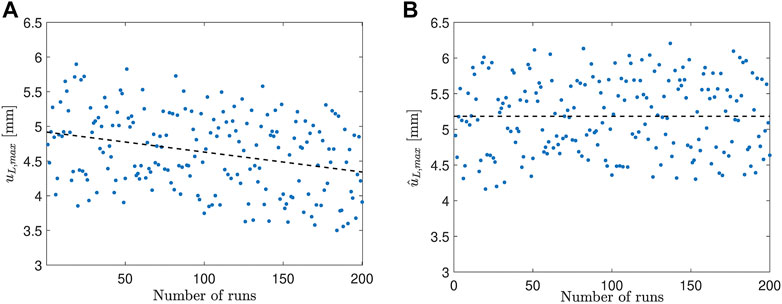
FIGURE 7. Effect of detrending on the QoI: (A) original values (uL,max) and (B) values after detrending (
Consistent with the notation introduced in Section 2, surrogate modeling was performed considering the following input parameter vector and response QoI:
4.2 Global Sensitivity Analysis Framework Results
A GLAM of the hybrid model dynamic response QoI was computed as explained in Section 2. In this study, we set the candidate degrees up to 5 for
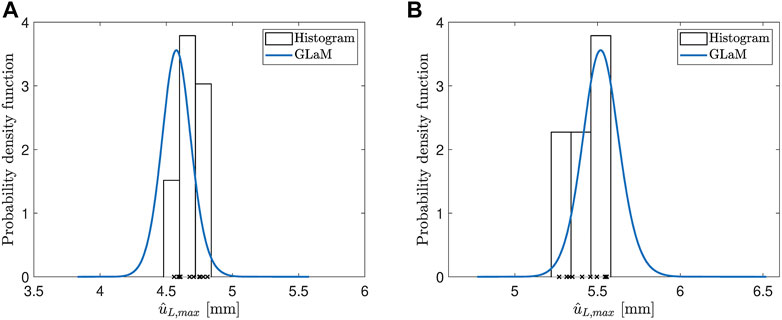
FIGURE 8. PDF of
As highlighted by Torre et al. (2019), in presence of noisy data, PCE is a powerful denoiser, which naturally provides a surrogate of the average model response
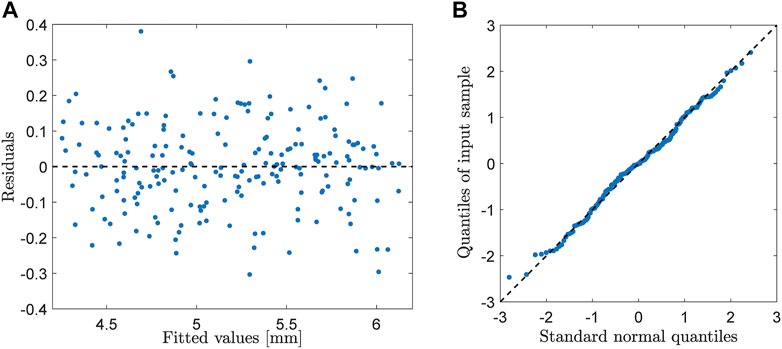
FIGURE 9. Analysis of QoI residuals with respect to PCE: (A) Tukey-Anscombe plot and (B) Q-Q plot.
As reported in Section 2.2, only first- and higher-order Sobol’ indices but not total Sobol’ indices can be obtained from the GLAM of the QoI. Instead, first and total Sobol’ indices can be computed for the QoI quantiles. Accordingly, Figure 10 provides first and total Sobol’ indices of the 5, 50 and 95% quantiles of
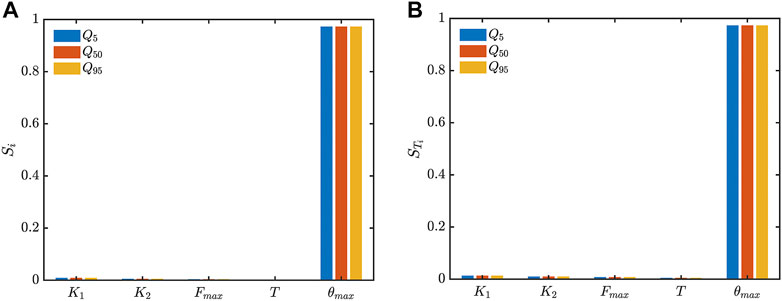
FIGURE 10. Sobol’ indices of 5, 50, and 95% quantiles of
The development and implementation of the surrogate modeling, as well as the GSA, was performed using the UQLab software framework developed by the Chair of Risk, Safety and Uncertainty Quantification in ETH Zurich (Marelli and Sudret (2014)).
5 Conclusion
This paper described a framework for global sensitivity analysis of stochastic hybrid models. A generalized lambda surrogate modeling technique is used to compute the Sobol’ sensitivity indices for the quantiles of a response quantity of interest. The idea of using surrogate modeling to enable global sensitivity studies with few expensive-to-evaluate hybrid simulations was already presented in a previous work of the authors. However, in that work the physical substructure of the hybrid model was treated as deterministic, namely the associated aleatory uncertainties were neglected by assuming that nominally identical specimens have identical responses. Nevertheless, this assumption is still far from a realistic scenario in structural testing, as nominally identical specimens are, in practice, never actually identical. Therefore, the novelty of this work lies in the extension of global sensitivity analysis to the case of stochastic hybrid models, covering the more realistic situation where the hybrid model response for two nominally identical physical substructures is not repeatable. A great advantage of the proposed framework is that the generalized lambda surrogate model does not require repeated evaluations of the same sample. On the other hand, an assumption of the framework is that the response distribution of the stochastic hybrid model can be approximated by the generalized lambda distribution. The main limitation of the generalized lambda surrogate model is that the generalized lambda distribution is flexible but cannot represent multimodal distributions. Nevertheless, one can use a mixture of generalized lambda models to bypass this limit. In addition, a generalized lambda surrogate model can emulate the response of a stochastic model even in the case of dependent input parameters. However, for the latter case, generalized Sobol’ indices should be employed instead.
The effectiveness of the proposed framework is demonstrated in an experimental application consisting of a hybrid model with five parameters and subjected to mechanical and thermal loading. The results of the demonstration study highlight that the stochasticity of the particular hybrid model under consideration is homoscedastic with respect to the hybrid model parameters. Accordingly, both the first-order and total Sobol’ sensitivity indices of 5, 50, and 95% quantiles are almost identical. Moreover, the temperature plateau value of the thermal loading is the most sensitive parameter for the selected response quantity of interest. The outcome of the experiment demonstrates the effectiveness of the proposed global sensitivity analysis framework in revealing the inner workings of the hybrid model.
Global sensitivity analysis for stochastic hybrid models advances the current practices of hybrid simulation and establishes it as a tool capable to investigate the dynamic response of structural systems taking into account aleatory and epistemic uncertainties originating not only from numerical substructures and respective loading but also from physical specimens. The latter feature is of significant importance since the internal stochasticity of physical specimens is in general unknown and difficult to control.
Future research will address the issue of adaptive sampling of the parameter space of the stochastic hybrid model to minimize the experimental cost necessary to compute an accurate surrogate model for global sensitivity analysis.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Author Contributions
NT: conceptualization, methodology, software, validation, writing. XZ: conceptualization, software, writing. GA: conceptualization, methodology, software, writing. SM: conceptualization, writing. BS: supervision, writing. BS: supervision, funding acquisition, writing.
Funding
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie grant agreement No. 764547. The sole responsibility of this publication lies with the author(s). The European Union is not responsible for any use that may be made of the information contained herein. The realization of the test rig work was funded by the Swiss Secretariat of Education Research and Innovation (SERI)–Swiss Space Office (SSO) (THERMICS MdP2016 Project (Thermo-Mechanical Virtualization of Hybrid Flax/Carbon Fiber Composite for Spacecraft Structures), grant number REF-1131-61001).
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abbiati, G., Covi, P., Tondini, N., Bursi, O. S., and Stojadinović, B. (2020). A Real-Time Hybrid Fire Simulation Method Based on Dynamic Relaxation and Partitioned Time Integration. J. Eng. Mech. 146, 04020104. ZSCC: NoCitationData[s0]. doi:10.1061/(asce)em.1943-7889.0001826
Abbiati, G., Hey, V., Rion, J., and Stojadinovic, B. (2018). Thermo-Mechanical Virtualization of Hybrid Flax/Carbon Fiber Composite for Spacecraft Structures. Thermics Project, Final Report. Tech. rep., ETH Zurich.
Abbiati, G., Lanese, I., Cazzador, E., Bursi, O. S., and Pavese, A. (2019). A Computational Framework for Fast-Time Hybrid Simulation Based on Partitioned Time Integration and State-Space Modeling. Struct. Control. Health Monit. 26, 1–28. doi:10.1002/stc.2419
Abbiati, G., Marelli, S., Tsokanas, N., Sudret, B., and Stojadinović, B. (2021). A Global Sensitivity Analysis Framework for Hybrid Simulation. Mech. Syst. Signal Process. 146. doi:10.1016/j.ymssp.2020.106997
Anscombe, F. J., and Tukey, J. W. (1963). The Examination and Analysis of Residuals. Technometrics 5, 141–160. doi:10.1080/00401706.1963.10490071
A. Saltelli (Editor) (2008). Global Sensitivity Analysis: The Primer (Chichester, England; Hoboken, NJ: John Wiley).
Bas, E. E., Moustafa, M. A., and Pekcan, G. (2020). Compact Hybrid Simulation System: Validation and Applications for Braced Frames Seismic Testing. J. Earthquake Eng. 0, 1–30. doi:10.1080/13632469.2020.1733138
Berveiller, M., Sudret, B., and Lemaire, M. (2006). Stochastic Finite Element: a Non Intrusive Approach by Regression. Eur. J. Comput. Mech. 15, 81–92. doi:10.3166/remn.15.81-92
Blatman, G., and Sudret, B. (2011). Adaptive Sparse Polynomial Chaos Expansion Based on Least Angle Regression. J. Comput. Phys. 230, 2345–2367. doi:10.1016/j.jcp.2010.12.021
Browne, T. (2017). Regression Models and Sensitivity Analysis for Stochastic Simulators: Applications to Non-destructive Examination. Paris: Ph.D. thesis, Université of Paris Descartes.
Chastaing, G., Gamboa, F., and Prieur, C. (2015). Generalized Sobol Sensitivity Indices for Dependent Variables: Numerical Methods. J. Stat. Comput. Simulation 85, 1306–1333. doi:10.1080/00949655.2014.960415
Ernst, O. G., Mugler, A., Starkloff, H.-J., and Ullmann, E. (2012). On the Convergence of Generalized Polynomial Chaos Expansions. Esaim: M2an 46, 317–339. doi:10.1051/m2an/2011045
Freimer, M., Kollia, G., Mudholkar, G. S., and Lin, C. T. (1988). A Study of the Generalized Tukey Lambda Family. Commun. Stat. - Theor. Methods 17, 3547–3567. doi:10.1080/03610928808829820
Idinyang, S., Franza, A., Heron, C. M., and Marshall, A. M. (2019). Real-time Data Coupling for Hybrid Testing in a Geotechnical Centrifuge. Int. J. Phys. Model. Geotechnics 19, 208–220. doi:10.1680/jphmg.17.00063
Iooss, B., and Ribatet, M. (2009). Global Sensitivity Analysis of Computer Models with Functional Inputs. Reliability Eng. Syst. Saf. 94, 1194–1204. doi:10.1016/j.ress.2008.09.010
Karian, Z. A., and Dudewicz, E. J. (2000). Fitting Statistical Distributions: The Generalized Lambda Distribution and Generalized Bootstrap Methods. New York: Chapman and Hall/CRC Press.
Marelli, S., Lamas, C., Konakli, K., Mylonas, C., Wiederkehr, P., and Sudret, B. (2019). “UQLab User Manual – Sensitivity Analysis,” in Tech. Rep. # UQLab-V1.3-106, Chair of Risk, Safety and Uncertainty Quantification (Switzerland: ETH Zurich).
Marelli, S., and Sudret, B. (2014). “UQLab: A Framework for Uncertainty Quantification in Matlab,” in Proc. 2nd Int. Conf. on Vulnerability, Risk Analysis and Management (ICVRAM2014), Liverpool, United Kingdom, 2554–2563. doi:10.1061/9780784413609.257
Mckay, M. D., Beckman, R. J., and Conover, W. J. (2000). A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code. Technometrics 42, 55–61. doi:10.1080/00401706.2000.10485979
Moustafa, M., and Mosalam, K. (2015). “Development of Hybrid Simulation System for Multi-Degree- of-Freedom Large-Scale Testing,” in 6th International Conference on Advances in Experimental Structural Engineering, Urbana-Champaign, United States (): University of Illinois).
Rasmussen, C. E., and Williams, C. K. I. (2006). Gaussian Processes for Machine Learning. Adaptive Computation and Machine Learning. Cambridge, Mass: MIT Press.
Sauder, T., Marelli, S., Larsen, K., and Sørensen, A. J. (2018). Active Truncation of Slender marine Structures: Influence of the Control System on Fidelity. Appl. Ocean Res. 74, 154–169. doi:10.1016/j.apor.2018.02.023
Schellenberg, A. H., Mahin, S. A., and Fenves, G. L. (2009). “Advanced Implementation of Hybrid Simulation,” in Tech. Rep. PEER 2009/104, Pacific Earthquake Engineering Research Center (Berkeley: University of California).
Sobol’, I. M. (1993). Sensitivity Estimates for Nonlinear Mathematical Models. Math. Model. Comp. Exp. 1, 407–414.
Sudret, B. (2008). Global Sensitivity Analysis Using Polynomial Chaos Expansions. Reliability Eng. Syst. Saf. 93, 964–979. doi:10.1016/j.ress.2007.04.002
Torre, E., Marelli, S., Embrechts, P., and Sudret, B. (2019). Data-driven Polynomial Chaos Expansion for Machine Learning Regression. J. Comput. Phys. 388, 601–623. doi:10.1016/j.jcp.2019.03.039
Vilsen, S. A., Sauder, T., Sørensen, A. J., and Føre, M. (2019). Method for Real-Time Hybrid Model Testing of Ocean Structures: Case Study on Horizontal Mooring Systems. Ocean Eng. 172, 46–58. doi:10.1016/j.oceaneng.2018.10.042
Xiu, D., and Karniadakis, G. E. (2002). The Wiener--Askey Polynomial Chaos for Stochastic Differential Equations. SIAM J. Sci. Comput. 24 (2), 619–644. doi:10.1137/S1064827501387826
Zhu, X., and Sudret, B. (2021a). Emulation of Stochastic Simulators Using Generalized Lambda Models. Siam/asa J. Uncertainty Quantification 9, 1345–1380. doi:10.1137/20m1337302
Zhu, X., and Sudret, B. (2021b). Global Sensitivity Analysis for Stochastic Simulators Based on Generalized Lambda Surrogate Models. Reliability Eng. Syst. Saf. 10. doi:10.1016/j.ress.2021.107815
Keywords: hybrid simulation, stochastic hybrid model, global sensitivity analysis (GSA), Sobol’ indices, stochastic surrogate modeling, generalized lambda model
Citation: Tsokanas N, Zhu X, Abbiati G, Marelli S, Sudret B and Stojadinović B (2021) A Global Sensitivity Analysis Framework for Hybrid Simulation with Stochastic Substructures. Front. Built Environ. 7:778716. doi: 10.3389/fbuil.2021.778716
Received: 17 September 2021; Accepted: 29 October 2021;
Published: 01 December 2021.
Edited by:
Georgios Eleftherios Stavroulakis, Technical University of Crete, GreeceReviewed by:
Mohsen Rashki, University of Sistan and Baluchestan, IranAram Soroushian, International Institute of Earthquake Engineering and Seismology, Iran
Copyright © 2021 Tsokanas, Zhu, Abbiati, Marelli, Sudret and Stojadinović. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Nikolaos Tsokanas, dHNva2FuYXNAaWJrLmJhdWcuZXRoei5jaA==