 Guanchao Feng
Guanchao Feng Cassandra Heiselman
Cassandra Heiselman J. Gerald Quirk
J. Gerald Quirk Petar M. Djurić
Petar M. Djurić- 1Department of Electrical and Computer Engineering, Stony Brook University, Stony Brook, NY, United States
- 2Department of Obstetrics and Gynecology, Renaissance School of Medicine, Stony Brook University, Stony Brook, NY, United States
Introduction: During labor, fetal heart rate (FHR) and uterine activity (UA) can be continuously monitored using Cardiotocography (CTG). This is the most widely adopted approach for electronic fetal monitoring in hospitals. Both FHR and UA recordings are evaluated by obstetricians for assessing fetal well-being. Due to the complex and noisy nature of these recordings, the evaluation by obstetricians suffers from high interobserver and intraobserver variability. Machine learning is a field that has seen unprecedented advances in the past two decades and many efforts have been made in computerized analysis of CTG using machine learning methods. However, in the literature, the focus is often only on FHR signals unlike in evaluations performed by obstetricians where the UA signals are also taken into account.
Methods: Machine learning is a field that has seen unprecedented advances in the past two decades and many efforts have been made in computerized analysis of CTG using machine learning methods. However, in the literature, the focus is often only on FHR signals unlike in evaluations performed by obstetricians where the UA signals are also taken into account. In this paper, we propose to model intrapartum CTG recordings from a dynamical system perspective using empirical dynamic modeling with Gaussian processes, which is a Bayesian nonparametric approach for estimation of functions.
Results and Discussion: In the context of our paper, Gaussian processes are capable for simultaneous estimation of the dimensionality of attractor manifolds and reconstructing of attractor manifolds from time series data. This capacity of Gaussian processes allows for revealing causal relationships between the studied time series. Experimental results on real CTG recordings show that FHR and UA signals are causally related. More importantly, this causal relationship and estimated attractor manifolds can be exploited for several important applications in computerized analysis of CTG recordings including estimating missing FHR samples, recovering burst errors in FHR tracings and characterizing the interactions between FHR and UA signals.
1 Introduction
During labor, without adequate level of oxygenation, a fetus can become hypoxic and acidotic. Very small changes in pH may significantly affect the function of various fetal organ systems, such as the central nervous system and the cardiovascular system (Omo-Aghoja, 2014). Oxygen deprivation or hypoxia is one of the most common challenges in fetal life, and can cause permanent brain damage or even death of the fetus (Giussani, 2016). Continuous electronic fetal monitoring (EFM) is commonly performed by Cardiotocography (CTG). The CTG monitor samples both fetal heart rate (FHR) and maternal uterine contractions or uterine activity (UA). The purpose of EFM is to alert obstetricians of these changes in fetal status for appropriate and timely intervention (Afors and Chandraharan, 2011). In Figure 1, we see the same CTG recording displayed in US format (horizontal: 3 cm/min, vertical: 30 bpm/cm) and in EU format (horizontal: 1 cm/min, vertical: 20 bpm/cm), respectively. In each plot, the upper tracing represents FHR signal and the lower tracing is the corresponding UA signal. Since the focus of our paper is on intrapartum CTG, in this work, the term CTG refers to intrapartum CTG if not specifically stated.
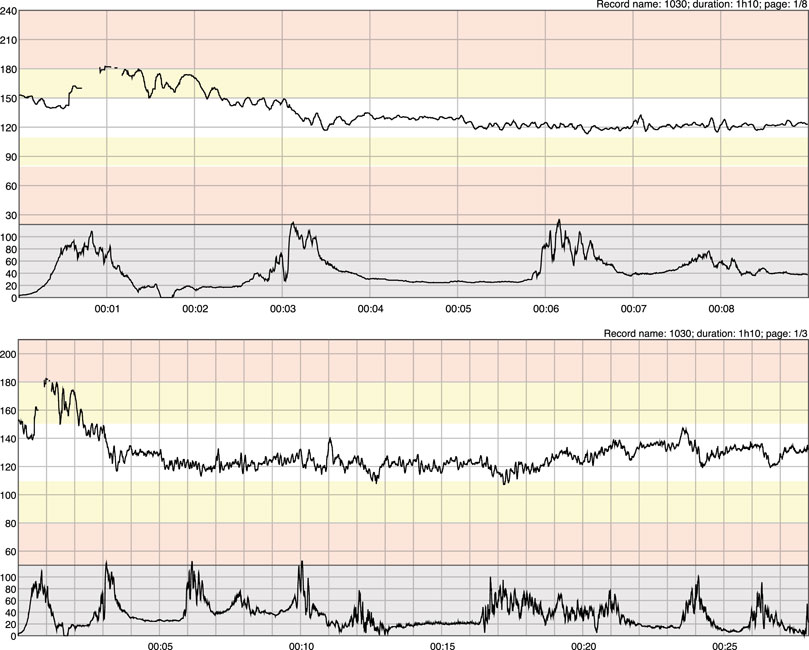
FIGURE 1. A segment of CTG recording from an open access intrapartum CTG database [described in (Chudáček et al., 2014)] in US (top two plots) and in EU (bottom two plots) paper formats, respectively.
The CTG recordings are visually evaluated by experienced obstetricians, nurse-midwives and labor & delivery room nurses following clinical guidelines (Macones et al., 2008; Ayres-de Campos et al., 2015) that are based on FHR and interbeat variability, frequency and duration of uterine contractions, and the temporal relationship of decelerations of the FHR in relationship to the onset as well as the offset of uterine contractions. The FHR tracings are then usually categorized into one of three categories: category I as normal, category II as atypical or indeterminate, and category III as abnormal. Although category II patterns occur in the majority of fetuses in labor, there is still no standard approach to their management Clark et al. (2013).
After more than half a century of EFM in practice, its usefulness and benefits still remain controversial. During this period, there has been an increase in cesarean delivery and instrumental vaginal births (Alfirevic et al., 2006), and yet, the incidences of neonatal mortality and cerebral palsy have not been reduced (Bailey, 2009). However, it is worth noting that CTG has remained a widely used technology for assessing fetal wellbeing in real time during labor (Freeman et al., 2012; Nageotte, 2015). Presently, most hospitals in the United States offer CTG as the primary means of fetal surveillance during labor.
Several studies have reported that the evaluation of FHR tracings by obstetricians suffers from high interobserver and intraobserver variability. In a recent article, the agreement among expert obstetricians was investigated by having nine experienced obstetricians annotate 634 CTG recordings. Their results showed that the inter- and intra-observer variability was large and that the overall proportion of agreement among them only reached 48% (Hruban et al., 2015). There is little doubt that interpreting CTG recordings using morphological features is an exceptionally complex and often unsatisfactory exercise.
Computerized analysis of intrapartum CTG recordings is a logical approach because of its inherent “objectivity.” Computerized analysis has evolved from algorithms that literally implement the clinical guidelines to sophisticated machine learning techniques, which exploit patterns that cannot be discovered by human eyes. The interpretation of intrapartum CTG recordings, however, still remains challenging for computerized systems (Steer, 2014). Interestingly, none of the exciting breakthroughs in machine learning have contributed to revolutionizing the computerized analysis of intrapartum CTG recordings yet (Georgieva et al., 2019).
Unlike the assessment performed by obstetricians and physicians where FHR is evaluated jointly with UA and other clinical data, in the literature of automated analysis, the focus is often classification of FHR tracings (Georgoulas et al., 2017), and the analysis usually concentrates on the FHR signals only. That is, other intrapartum signals, such as UA and maternal heart rate (MHR), and clinical data are not considered. Since these other signals and data also provide valuable information about the fetal wellbeing, excluding them from the analysis is a disadvantage. Rare exceptions of articles where FHR signals are studied in conjunction with UA signals are (Romano et al., 2006; Cesarelli et al., 2010; Warmerdam et al., 2016; Warmerdam et al., 2018).
Empirical dynamic modeling (EDM) is a flexible data-driven framework for modeling non-linear dynamic systems. It is built upon the mathematical theory of reconstructing system attractors from time series data and is often used for studying systems with non-linear state-dependent behavior. An attractor of a system can be seen as a collection of states toward which the system tends to evolve under different initial conditions. Thus, reconstructing an attractors is of great importance in investigating system characteristics and behavior. A Gaussian process (GP) extends the concept of multivariate Gaussian distribution. The latter is defined for vectors of finite dimensions, whereas GPs are objects of infinite dimension, which gives them flexibility for modeling distributions of functions. Learning unknown functions (or mappings) lies at the core of solving many machine learning problems, and in practice, GPs provide a Bayesian non-parametric framework for learning unknown functions. Particularly, when we have to estimate an unknown function, we first specify a prior distribution for this function using a GP (instead of assuming an analytical form of it, like a polynomial of some form or a set of superimposed sinusoids). Then, we learn the posterior distribution of the function by incorporating the observed data and using Bayes’ theorem. We point out that our prior knowledge of the unknown function (e.g., periodicity) can be encoded in the prior distribution of the GP.
In this paper, we present our work on intrapartum CTG analysis using empirical dynamic modelling (EDM) with Gaussian processes. With our approach, we are able to reconstruct attractor manifolds from time series data within the Bayesian non-parametric probabilistic framework. Instead of only relying on FHR signals, both FHR and UA signals are taken into account from a dynamical system perspective. The Bayesian nature allows for data efficiency and proper quantification of uncertainties in learning.
The article is structured as follows. In the next section, we first briefly introduce an open access CTG database that has been widely adopted in computerized analysis of CTG recordings. We also selected this database for our experiments. Then we discuss the background and some fundamentals of EDM and GP. In Section 3, we describe our GP-based EDM in details. In Section 4 and Section 5 we present (direct and indirect) applications of GP-based EDM in CTG analysis. Finally, in Section 6, we conclude this article with some final remarks.
2 Background
2.1 Open access intrapartum CTG database
In this work, in all the experiments we used an open access intrapartum CTG database, known as CTU-UHB database. The intrapartum CTG database consists of a total of 552 intrapartum recordings, which were acquired between April 2010 and August 2012 at the Obstetrics Ward of the University Hospital in Brno (UHB), Czech Republic. The data were collected and anonymized at the UHB and de-identified at the Czech Technical University (CTU). The database is composed of a mixture of recordings acquired by ultrasound Doppler probes, direct scalp measurements or a combination of both. Each CTG record contains time information and signal of fetal heart rate and uterine contractions, both sampled at 4 Hz. When a signal was recorded using an internal scalp electrode, it also contained T/QRS ratio and information about biphasic T-waves. All recordings have available biochemical markers as well as some more general clinical features. A detailed description of this database and reasoning behind the selection criteria for including recordings in the database can be found in (Chudáček et al., 2014).
2.2 Empirical dynamic modelling
Empirical dynamic modeling (EDM) is an emerging non-parametric framework for modeling non-linear dynamic systems (Chang et al., 2017). It is based on the mathematical theory of reconstructing attractor manifolds from time series data. Unlike models based on hypothesized parametric equations or known physical laws that describe simple idealized situations, empirical models infer patterns and associations from the data that are highly flexible and usually of great use in complex natural settings (Sugihara et al., 2020). The purpose of EDM is to infer the behavior of dynamic systems by reconstructing state space from time series data. This approach is based on mathematical theory developed initially in (Takens, 1981; Takens, 1985).
A direct application of EDM is causal discovery using reconstructed attractor manifolds, a method that is referred to as convergent cross mapping (CCM) and proposed in (Sugihara et al., 2012). From a dynamical system perspective, two time series are causally related if they are from the same dynamical system. In particular, let Mx and My denote the reconstructed attractor manifolds from time series xt and yt, respectively. If xt and yt belong to the same dynamical system, Mx and My are topologically similar because they are embeddings of the (latent) attractor
2.3 Gaussian processes
A GP is a stochastic process with every finite set of random variables having a multivariate normal distribution (Rasmussen and Williams, 2006). A GP extends a multivariate Gaussian distribution to infinite dimensionality. Therefore, a GP can be seen as a distribution of a real-valued function f(x) in which x denotes the input and usually is a vector. The infinite dimensionality is actually easy to work with, given the marginalization property of multivariate Gaussian distributions. Further, latent functions can be conveniently marginalized out when computing model evidence.
A GP is characterized by its mean function m(x) and covariance function kf(xi, xi), which are defined by
where
The covariance matrix Kff for training data can be obtained by evaluating the covariance function on X, i.e., Kff = kf(X, X), where
and the prior probability density function of f(X), which is specified by a GP, can be written as
where θ denotes the set of hyperparameters used for modeling the covariance function.
Training refers to learning the model parameters, which include the hyperparameters θ and the variance of the observation noise
can be used as an objective function for finding the.
We note that the last three terms in Eq. 4) have interpretations. The first one,
For a test input X*, the predictive distribution of the test output, p(f*|X*, X, θ), will be a Gaussian distribution with a mean and covariance given by
We should note that the prediction is provided by way of a predictive distribution instead of a simple point estimate, which is preferable in many situations, particularly, in decision making. Since the mode of a Gaussian distribution is the same as its expectation, the mean of a predictive distribution, i.e.,
The covariance function transforms distance or similarity between inputs to covariance between outputs, and therefore, the design of the covariance function is critical in modeling. Perhaps the most widely adopted covariance function is the squared exponential or radial basis function (RBF). Its general form is given by
where the characteristic length-scale ℓq > 0 and the signal variance
where d is the distance between xi and xj. Unlike the RBF covariance function, the Matérn covariance functions generally models rough processes. More information on the designing of covariance functions can be found in (Rasmussen and Williams, 2006).
3 Model description
3.1 Taken’s theorem
We reiterate that the core of EDM is state space reconstruction based on Takens’ theorem, which is stated as follows:
Theorem 1 (Takens’ theorem). Let
•
•
is an embedding of
In the literature of EDM, the most popular choice of ϕ is delay embedding, i.e., delay by a constant τ. Takens’ theorem provides a theoretical foundation that under some mild conditions, we can reconstruct
3.2 Empirical dynamic modeling with GP
Recently it has been shown that the dynamics of processes can be learned with continuous time latent processes that are parametrized by neural ordinary differential equations (Chen et al., 2018). However, learning the parameters in the neural networks requires a large amount of training data, which can be difficult in applications where observations are expensive to collect. Instead, EDM and GPs can exploit the widely adopted delay embedding and estimate a latent representation of the state space. Conceptually, EDM with a GP combine the convenience of delay embedding and power of representation learning.
In the initial reconstruction step using delay embedding, instead of performing grid search for selecting E and τ, we directly assign a relatively large E, e.g., E = 10 or E = 20, to fulfill the requirement of Taken’s theorem. To preserve the dynamical information, we choose τ = 1, i.e., a delay by one sample, which is the smallest delay. We denote this initial reconstruction as Minit. That is, given a time series xt, an E-dimensional vector
Then we apply a GP latent variable model (GPLVM) (Titsias and Lawrence, 2010) to infer a lower dimensional latent representation of Minit, denoted as MGP. The generative model is as follows:
where
The learning requires maximizing the marginal likelihood given by:
Unlike the GP regression framework, this marginal likelihood is intractable because MGP and Minit are related by the covariance function in a highly non-linear manner, and in general, non-linear mapping will not preserve Gaussianity. This is handled in (Titsias and Lawrence, 2010) by employing variational inference and approximating the true posterior p(MGP∣Minit) by a Gaussian variational distribution q(MGP). From this distribution, we obtain a tractable lower bound on the marginal likelihood, which is used for learning.
The ARD weights embedded in the covariance function enable us to estimate the dimensionality of the underlying latent attractor manifold, i.e., d, since irrelevant dimensions will be assigned weights close to zero. Instead of initializing
3.3 A toy example
We demonstrate the aforementioned approach of EDM using the Lorenz system (Tabor and Weiss, 1981; Emanuel, 1994) which is non-linear, non-periodic, three-dimensional and deterministic. It has been well-studied for having chaotic solutions for certain parameter values and initial conditions. To demonstrate that our GP-based method can provide reliable reconstruction of an attractor manifold, we generated a Lorenz attractor (a set of chaotic solutions of the Lorenz system)
and a classic set of parameter values a = 10,
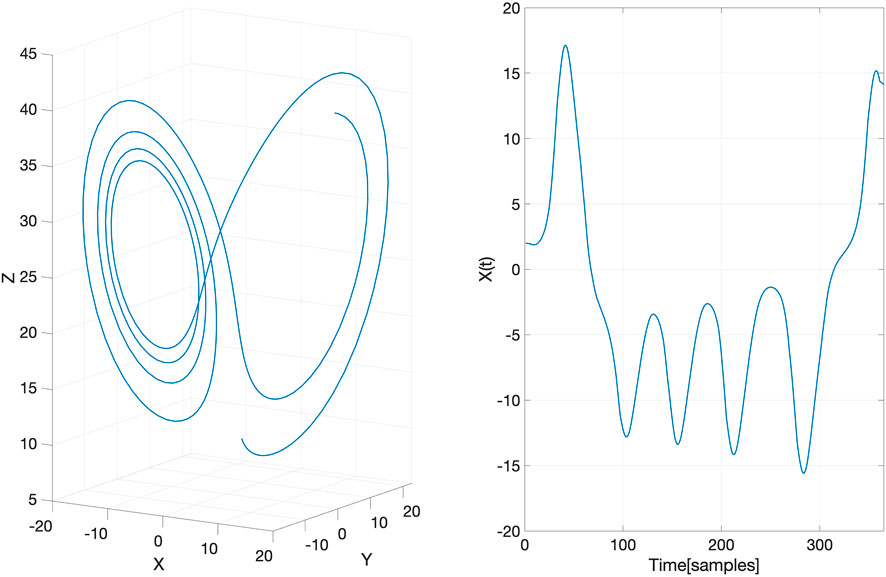
FIGURE 2. The underlying latent Lorenz attractor (left) generated in the toy example and its projection on the X-axis (right).
Then we reconstructed the attractor manifold from X(t) with our GP-based method. The reconstruction results are shown in Figure 3, where we can see that the
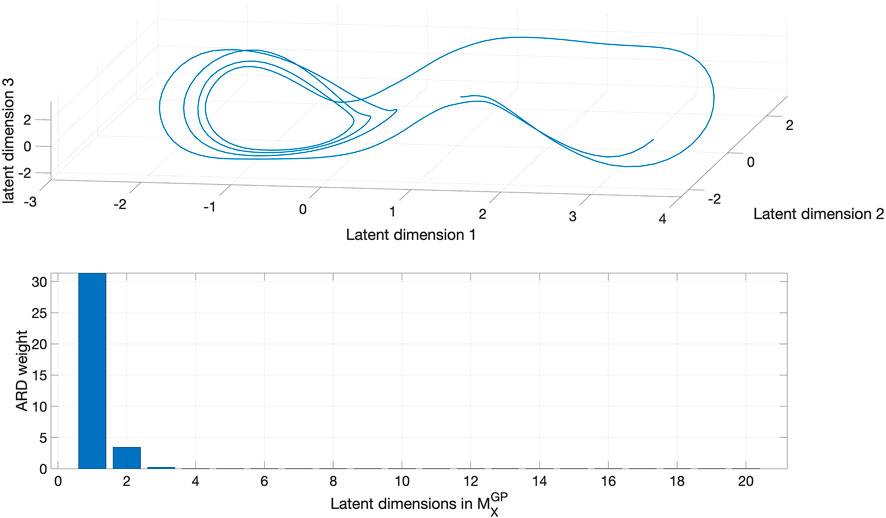
FIGURE 3. The reconstructed Lorenz attractor from X(t) using GP-based approach (top) and ARD weights of learned latent dimensions (bottom). The number of dimensions with non-zero ARD weights is three, which is the true dimension of the Lorenz attractor. The GP-based approach is capable of learning the dimension of the latent attractor from data in an automated manner.
4 Application I: Causal discovery between FHR and UA
As mentioned in Section 2.2, an immediate application of EDM is CCM for causal discovery from time series data. The basic idea of CCM is to measure the extent to which the historical record of one variable can reliably estimate states of the other variable using simplex projections (Sugihara and May, 1990). Essentially, CCM tests whether or not a neighborhood defined on Mx is preserved on My, and vice versa, i.e., for causal discovery it looks for a signature of cause in the history of the effect. More details about the CCM framework can be found in (Sugihara et al., 2012).
Although in the literature on obstetrics and gynecology it has been well recognized that changes on UA can cause changes in FHR (Spinnewijn et al., 1996; Nageotte, 2015; Sletten et al., 2016), we confirmed this conclusion by testing causality between the FHR and UA signals within the CCM framework. Specifically, we first reconstructed the attractor manifolds from the FHR and UA signals using the GP-based EDM. For instance, a short segment of FHR and UA signals and their corresponding reconstructed attractor manifolds are shown in Figure 4. Then we carried out the simplex projection algorithm using GP regression, similar to the original simplex project in (Sugihara and May, 1990). However, unlike the original simplex projection, the GP-based simplex projection is more robust to noise since the observation noise is considered explicitly in the generative process as shown in Eq. 1). Considering that the causality between FHR and UA signals is well recognized and due to limited space, the CCM framework and GP-based simplex projection are not described further here. More details about this can be found in (Feng et al., 2020a). It is worth noting that the developed framework in (Feng et al., 2020a) can readily be applied to causal discovery in other communities.
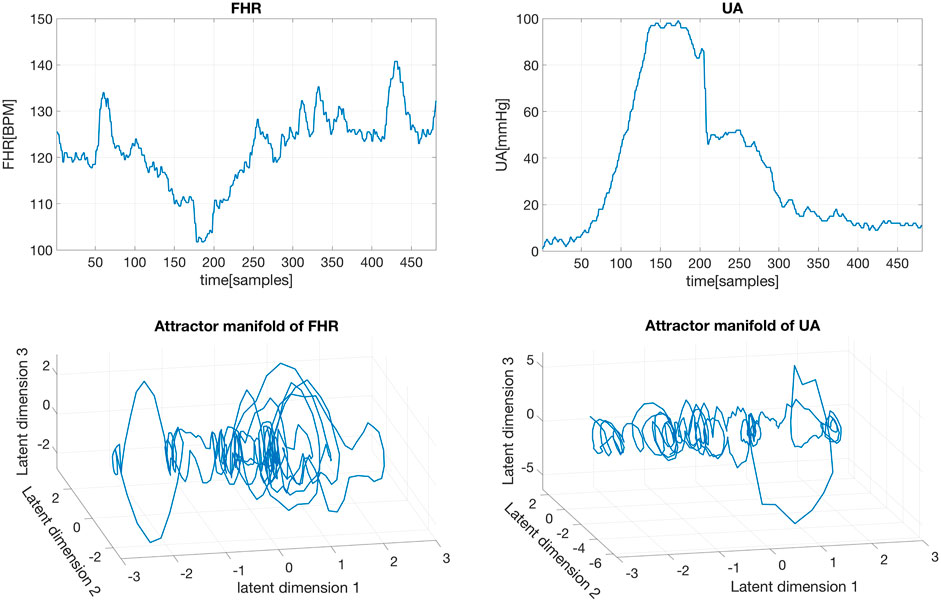
FIGURE 4. Raw FHR and UA segments (top), and their corresponding reconstructed attractor manifolds with the GP-based method (bottom).
5 Application II: Characterizing interactions between FHR and UA signals
In the evaluation performed by obstetricians, the FHR signal is assessed with reference to its corresponding UA signal. For instance, widely adopted FHR patterns are the early deceleration, which is defined as a symmetrical decrease and return back to the previous level and similarly, the late deceleration is defined as a visually apparent and gradual decrease in the FHR typically following the uterine contraction. In the literature of automated analysis of FHR, the interaction between FHR and UA is usually not considered. In this section, we show that the GP-based EDM can be applied to characterizing the interaction between FHR and UA signals.
We adopted the same open access database, and we used the first 30 min of FHR and UA signals in this experiment because when approaching the end of labor, the signal quality of both FHR and UA recordings deteriorates noticeably (Spilka, 2013). We used the preprocessing algorithm described in (Spilka, 2013). One CTG recording was excluded from our experiment because its UA recording is empty. Then for each CTG recording, we reconstructed the attractor manifolds of the FHR and UA signals using the GP-based method.
We used the Hausdorff distance to measure the distance or similarity between the reconstructed attractor manifolds (of the FHR and UA signals). In other words, for each CTG recording, we utilized the Hausdorff distance between
where
and d(a, b) represents the Euclidean distance between point a and point b.
In computerized analysis of CTG, the gold standard for labeling FHR tracings has been the umbilical arterial pH value of the fetus at birth (Armstrong and Stenson, 2007), although the choice of a cutoff value to determine “acidosis” has not been universally accepted (Georgieva et al., 2013; Abry et al., 2018). The popular FHR features generally are not well correlated with the pH value (the absolute value of the Pearson correlation coefficient between a feature and pH value is close to zero) (Fulcher et al., 2014). Therefore, the Pearson correlation coefficient with pH is an important well-adopted metric when proposing and selecting FHR features, and we adopted it for evaluating
For comparison purposes, we selected popular time domain features including the short term variability (STV) and the long term variability (LTV) (Gonçalves et al., 2006) as well as frequency domain features proposed in (Signorini et al., 2003). Further, we used non-linear domain features including the approximate entropy and the sample entropy (Delgado-Bonal and Marshak, 2019). The frequency domain features proposed in (Signorini et al., 2003) were the energies in four frequency bands: very low frequency (VLF): 0–.06 Hz, low frequency (LF): .06–.3 Hz, medium frequency (MF): .3–1 Hz and high frequency (LF): 1–2 Hz; and the ratio of energies defined by LF/(MF + HF).
The correlation matrix of the features and the umbilical artery pH is illustrated in Figure 5. The correlation coefficient between the umbilical cord artery pH value and
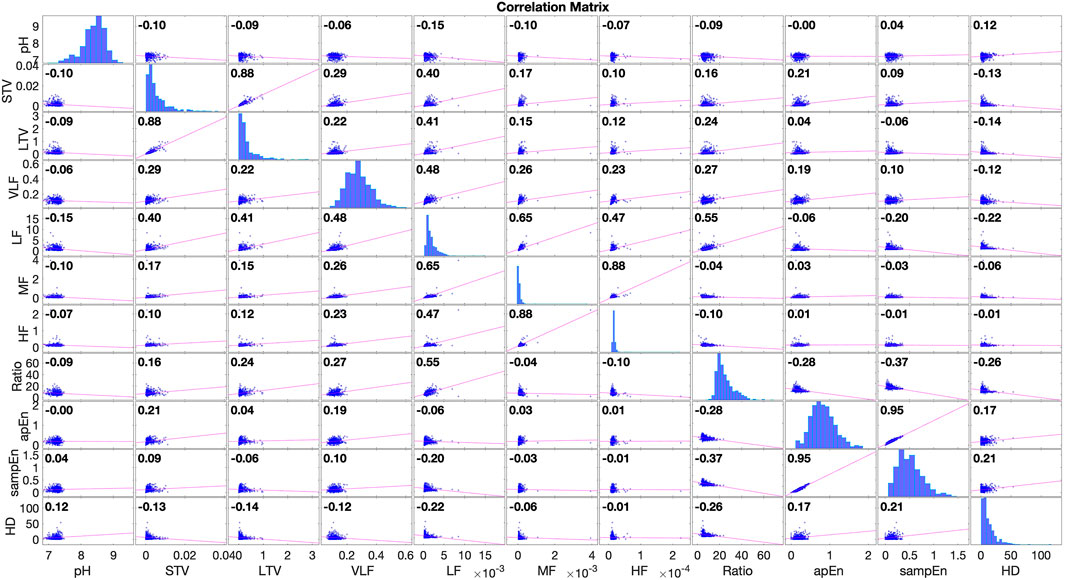
FIGURE 5. The correlation matrix of features and umbilical artery pH, computed with 552 CTG recordings in an open access CTG database described in Chudáček et al. (2014). The correlation coefficient between
Despite the popularity of labeling, CTG recordings using umbilical artery pH in computerized analysis, a few caveats should be noted. One is that, there may be an implicit bias in using pH values as a label because in many hospitals this value is acquired only after a pregnancy is declared or suspected to be of “high risk.” Further, the umbilical artery pH value can change over time. This indicates that the arterial pH has intrinsic variance and its value may be affected by factors such as duration of labor, cord blood sampling technique and total time elapsed between delivery of the fetus and acquisition of the umbilical cord blood sample. Finally, we recall that there are commonly adopted clinical evaluations of fetal wellbeing post-delivery, e.g., via Apgar scores, but they have inter-observer and intra-observer variability.
6 Application III: Estimating missing samples in FHR
In practice, many factors may affect the quality of the CTG signals in their acquisition, for instance, intra-recording displacement of the ultrasound probe, fetal or maternal movement, and technician’s expertise and experience (Hamelmann et al., 2016). A particular challenge in the analysis for CTG recordings is the large number of missing samples in FHR. For example, when using Doppler-based FHR measurements, the percentage of missing samples can vary from 0%–40% (Oikonomou et al., 2013). Such signal loss episodes have various causes, e.g., fetal or maternal movement, and misplaced transducer. The missing samples introduce variability and uncertainty to the extracted features. This not only indicates the necessity of adopting a probabilistic framework where we can properly express the uncertainties, but also suggests the need for appropriate treatment of the missing samples. Because many computerized approaches rely on features extracted from FHR recordings, these missing samples can cause serious problems if they are not properly addressed. In (Spilka et al., 2012), the authors investigated the stability of several commonly used FHR features when there were missing samples, and their experimental results showed that the feature values changed dramatically with the increase of missing samples. In automated FHR analysis, small segments of missing samples are interpolated with linear or cubic spline interpolation, and longer consecutive segments are often entirely removed (Sprott and Sprott, 2003).
In this application, we take causal relationship between FHR and UA into consideration when estimating missing samples in FHR recordings. Particularly, for reliable recovery of missing samples in FHR, we propose a GP-based method using GP regression which is capable of incorporating UA signals for the estimate of missing FHR samples automatically (Feng et al., 2017). We model the observed value of the ith sample yi in a FHR segment as a function of the time index i and its synchronized UA sample, ui, with additive Gaussian white noise, i.e.,
where
We designed the covariance function for this task as a sum of an RBF covariance function (for capturing slow varying components), a Matérn covariance function (ν = 3/2, for capturing rapid varying components), and a linear covariance function (for capturing linearity). Its specific form is as follows:
where
We tested this approach on two raw CTG segments of length 2 min that are plotted in Figure 6. We evaluated the performance by investigating the recovery performance with respect to different percentages of missing samples, which ranged from 1% to 99% with a step size of 1% on both CTG segments. For each percentage, the experiment was repeated 100 times and the performance metrics were averaged over 100 results. To demonstrate the contribution of the UA signal, the experiments were repeated using a similar GP model but with the UA samples excluded from the input of the latent function, i.e., ui was taken out from
and
where N is the number of missing samples, s is the ground truth and
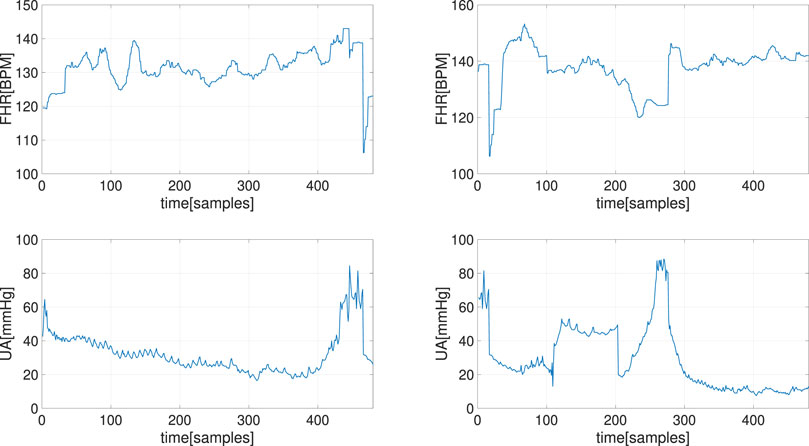
FIGURE 6. The two CTG segments, i.e., FHR (top) and UA (bottom) recordings, used for estimating of random missing samples in FHR.

FIGURE 7. Experimental results of estimating random missing samples in FHR: The experiment results for the first CTG segment (left), and the experiment results for the second CTG segment (right). The MSE (upper plot, in logarithmic scale) and SNR (bottom plot) of each method under different percentages of missing samples are presented, averaged over 100 experiments.
A more challenging situation in estimating the missing samples in FHR recordings is that when the missing samples are consecutive (i.e., they appear in bursts) and their corresponding UA samples are also missing. In (Feng et al., 2021), we proposed to utilize the attractor manifold of FHR signal learned by GP-based EDM for this task, because it enables us to identify similarity in terms of the state of system. Particularly, in the generative process, on top of the GP-based EDM, we explicitly correlated points on the attractor manifold in time by modeling
7 Conclusion
In this paper, we present a GP-based EDM for state space reconstruction from time series data, which is able to estimate the attractor manifold within probabilistic framework. The dimensionality of the attractor manifold is also simultaneously learned from observations, which is more principled comparing to the classical EDM with direct delay embedding where the parameters are selected using grid search-based methods. Furthermore, the learning is captured by the covariance of the variational distribution q(MGP), which is important in many applications especially in decision making. Unlike the traditional EDM with direct delay embedding, the observation noise is explicitly modeled in the GP-based EDM, and as a result, the GP-based EDM is more robust to observation noise. Comparing with EDM using neural ODE, the GP-based EDM is data efficient because the number of model parameters are much less then that of the neural networks. Improving the state space reconstruction is beneficial for subsequent analysis of the FHR and UA signals. For instance, in CCM for casual discovery, the correspondence between the reconstructed attractor manifolds is utilized to detect causality.
It is well recognized, from clinical point of view, that changes in the UA signal can cause changes in the FHR signal. In computerized analysis of CTGs, we first confirmed this conclusion within the CCM framework by testing the correspondence between the reconstructed attractor manifolds of the FHR and UA signals. This is also the logic behind taking the UA signal into consideration in automated analysis of CTGs. The GP-based EDM enables us to compare the FHR and UA signals simultaneously from a dynamical system point of view. As a direct application of a GP-based EDM, we then used the Hausdorff distance between the reconstructed attractor manifolds of the FHR and UA signals, i.e.,
Data availability statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding authors.
Author contributions
GF, CH, JQ, and PD contributed to conception and design of the study. GF wrote the first draft of the manuscript. CH, JQ, and PD revised the original manuscript. All authors contributed to manuscript revision, read, and approved the submitted version.
Funding
This work was supported by the National Institutes of Health under Award 1RO1HD097188-01.
Acknowledgments
The authors thank the support of NIH under Award 1RO1HD097188-01.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abry, P., Spilka, J., Leonarduzzi, R., Chudáček, V., Pustelnik, N., and Doret, M. (2018). Sparse learning for intrapartum fetal heart rate analysis. Biomed. Phys. Eng. Express 4, 034002. doi:10.1088/2057-1976/aabc64
Afors, K., and Chandraharan, E. (2011). Use of continuous electronic fetal monitoring in a preterm fetus: Clinical dilemmas and recommendations for practice. J. Pregnancy 2011, 1–7. doi:10.1155/2011/848794
Alfirevic, Z., Devane, D., Gyte, G., and Cuthbert, A. (2006). Continuous cardiotocography (CTG) as a form of electronic fetal monitoring (EFM) for fetal assessment during labour. Cochrane Database Syst. Rev. 3, CD006066. doi:10.1002/14651858.CD006066.pub3
Armstrong, L., and Stenson, B. (2007). Use of umbilical cord blood gas analysis in the assessment of the newborn. Archives Dis. Childhood-Fetal Neonatal Ed. 92, F430–F434. doi:10.1136/adc.2006.099846
Ayres-de Campos, D., Spong, C. Y., Chandraharan, E., and Panel, F. I. F. M. E. C. (2015). FIGO consensus guidelines on intrapartum fetal monitoring: Cardiotocography. Int. J. Gynecol. Obstet. 131, 13–24. doi:10.1016/j.ijgo.2015.06.020
Cesarelli, M., Romano, M., Ruffo, M., Bifulco, P., and Pasquariello, G. (2010). Foetal heart rate variability frequency characteristics with respect to uterine contractions. J. Biomed. Sci. Eng. 3, 1014–1021. doi:10.4236/jbise.2010.310132
Chang, C.-W., Ushio, M., and Hsieh, C.-h. (2017). Empirical dynamic modeling for beginners. Ecol. Res. 32, 785–796. doi:10.1007/s11284-017-1469-9
Chen, R. T., Rubanova, Y., Bettencourt, J., and Duvenaud, D. (2018). Neural ordinary differential equations. arXiv preprint arXiv:1806.07366.
Chudáček, V., Spilka, J., Burša, M., Janků, P., Hruban, L., Huptych, M., et al. (2014). Open access intrapartum CTG database. BMC pregnancy childbirth 14, 16. doi:10.1186/1471-2393-14-16
Clark, S. L., Nageotte, M. P., Garite, T. J., Freeman, R. K., Miller, D. A., Simpson, K. R., et al. (2013). Intrapartum management of category II fetal heart rate tracings: towards standardization of care. Am. J. Obstet. Gynecol. 209, 89–97. doi:10.1016/j.ajog.2013.04.030
Damianou, A., Ek, C., Titsias, M., and Lawrence, N. (2012). Manifold relevance determination. arXiv preprint arXiv:1206.4610.
Damianou, A. C., Titsias, M. K., and Lawrence, N. D. (2016). Variational inference for latent variables and uncertain inputs in Gaussian processes. J. Mach. Learn. Res. 17, 1425–1486.
Delgado-Bonal, A., and Marshak, A. (2019). Approximate entropy and sample entropy: A comprehensive tutorial. Entropy 21, 541. doi:10.3390/e21060541
Feng, G., Quirk, J. G., and Djurić, P. M. (2017). “Recovery of missing samples in fetal heart rate recordings with Gaussian processes,” in Signal Processing Conference (EUSIPCO), 2017 25th European, Kos island, Greece, August 28–September 2, 2017 (IEEE), 261–265.
Feng, G., Quirk, J. G., and Djurić, P. M. (2020a). “Discovering causalities from cardiotocography signals using improved convergent cross mapping with Gaussian processes,” in ICASSP 2020-2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, May 4–8, 2020 (IEEE), 1309–1313.
Feng, G., Yu, K., Wang, Y., Yuan, Y., and Djurić, P. M. (2020b). “Improving convergent cross mapping for causal discovery with Gaussian processes,” in ICASSP 2020-2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, May 4–8, 2020 (IEEE), 3692–3696.
Feng, G., Quirk, J. G., Heiselman, C., and Djurić, P. M. (2021). “Estimation of consecutively missed samples in fetal heart rate recordings,” in 2020 28th European Signal Processing Conference (EUSIPCO), Dublin, Ireland, August 23–27, 2021 (IEEE), 1080–1084.
Fraser, A. M., and Swinney, H. L. (1986). Independent coordinates for strange attractors from mutual information. Phys. Rev. A 33, 1134–1140. doi:10.1103/physreva.33.1134
Freeman, R. K., Garite, T. J., Nageotte, M. P., and Miller, L. A. (2012). Fetal heart rate monitoring. Philadelphia: Lippincott Williams & Wilkins.
Fulcher, B. D., Georgieva, A., Redman, C. W., and Jones, N. S. (2014). Highly comparative fetal heart rate analysis. arXiv preprint arXiv:1412.1138.
Georgieva, A., Payne, S. J., Moulden, M., and Redman, C. W. (2013). Artificial neural networks applied to fetal monitoring in labour. Neural Comput. Appl. 22, 85–93. doi:10.1007/s00521-011-0743-y
Georgieva, A., Abry, P., Chudáček, V., Djurić, P. M., Frasch, M. G., Kok, R., et al. (2019). Computer-based intrapartum fetal monitoring and beyond: A review of the 2nd workshop on signal processing and monitoring in labor (october 2017, oxford, UK). Acta Obstet. Gynecol. Scand. 98, 1207–1217. doi:10.1111/aogs.13639
Georgoulas, G., Karvelis, P., Spilka, J., Chudáček, V., Stylios, C. D., and Lhotská, L. (2017). Investigating pH based evaluation of fetal heart rate (FHR) recordings. Health Technol. 7, 241–254. doi:10.1007/s12553-017-0201-7
Giussani, D. A. (2016). The fetal brain sparing response to hypoxia: physiological mechanisms. J. Physiol. 594, 1215–1230. doi:10.1113/jp271099
Gonçalves, H., Rocha, A. P., Ayres-de Campos, D., and Bernardes, J. (2006). Linear and nonlinear fetal heart rate analysis of normal and acidemic fetuses in the minutes preceding delivery. Med. Biol. Eng. Comput. 44, 847–855. doi:10.1007/s11517-006-0105-6
Hamelmann, P., Kolen, A., Schmitt, L., Vullings, R., van Assen, H., Mischi, M., et al. (2016). “Ultrasound transducer positioning aid for fetal heart rate monitoring,” in 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, United States, August 16–20, 2016 (IEEE), 4105–4108.
Hruban, L., Spilka, J., Chudáček, V., Janků, P., Huptych, M., Burša, M., et al. (2015). Agreement on intrapartum cardiotocogram recordings between expert obstetricians. J. Eval. Clin. Pract. 21, 694–702. doi:10.1111/jep.12368
Kennel, M. B., Brown, R., and Abarbanel, H. D. (1992). Determining embedding dimension for phase-space reconstruction using a geometrical construction. Phys. Rev. A 45, 3403–3411. doi:10.1103/physreva.45.3403
Lawrence, N. D. (2004). “Gaussian process latent variable models for visualisation of high dimensional data,” in Advances in neural information processing systems, 329–336.
Macones, G. A., Hankins, G. D., Spong, C. Y., Hauth, J., and Moore, T. (2008). The 2008 National Institute of Child Health and Human Development workshop report on electronic fetal monitoring: Update on definitions, interpretation, and research guidelines. J. Obstetric, Gynecol. Neonatal Nurs. 37, 510–515. doi:10.1111/j.1552-6909.2008.00284.x
Nageotte, M. P. (2015). “Fetal heart rate monitoring,” in Seminars in fetal and neonatal medicine (Elsevier), 20, 144–148.
Oikonomou, V. P., Spilka, J., Stylios, C. D., and Lhotská, L. (2013). “An adaptive method for the recovery of missing samples from FHR time series,” in Proceedings of the 26th IEEE International Symposium on Computer-Based Medical Systems, Porto, Portugal, June 20–22, 2013, 337–342.
Omo-Aghoja, L. (2014). Maternal and fetal acid-base chemistry: a major determinant of perinatal outcome. Ann. Med. health Sci. Res. 4, 8–17. doi:10.4103/2141-9248.126602
Rasmussen, C. E., and Williams, C. K. I. (2006). Gaussian processes for machine learning, 2. The MIT Press.
Romano, M., Bifulco, P., Cesarelli, M., Sansone, M., and Bracale, M. (2006). Foetal heart rate power spectrum response to uterine contraction. Med. Biol. Eng. Comput. 44, 188–201. doi:10.1007/s11517-006-0022-8
Schiecke, K., Pester, B., Feucht, M., Leistritz, L., and Witte, H. (2015). “Convergent cross mapping: Basic concept, influence of estimation parameters and practical application,” in 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milano, Italy, August 25–29, 2015 (IEEE), 7418–7421.
Shapiro, M. D., and Blaschko, M. B. (2004). On hausdorff distance measures. Massachusetts, Amherst, MA, Computer Vision Laboratory University
Signorini, M. G., Magenes, G., Cerutti, S., and Arduini, D. (2003). Linear and nonlinear parameters for the analysisof fetal heart rate signal from cardiotocographic recordings. IEEE Trans. Biomed. Eng. 50, 365–374. doi:10.1109/tbme.2003.808824
Sletten, J., Kiserud, T., and Kessler, J. (2016). Effect of uterine contractions on fetal heart rate in pregnancy: a prospective observational study. Acta obstetricia Gynecol. Scand. 95, 1129–1135. doi:10.1111/aogs.12949
Spilka, J., Chudáček, V., Burša, M., Zach, L., Huptych, M., Lhotská, L., et al. (2012). “Stability of variability features computed from fetal heart rate with artificially infused missing data,” in Computing in Cardiology (CinC), Krakow, Poland, September 9–12, 2012 (IEEE), 917–920.
Spilka, J. (2013). Complex approach to fetal heart rate analysis: A hierarchical classification model. Prague: Czech Technical University, 35–47. Faculty of Electrical Engineering.
Spinnewijn, W. E., Lotgering, F. K., Struijk, P. C., and Wallenburg, H. C. (1996). Fetal heart rate and uterine contractility during maternal exercise at term. Am. J. obstetrics Gynecol. 174, 43–48. doi:10.1016/s0002-9378(96)70371-x
Steer, P. (2014). Commentary on ‘antenatal cardiotocogram quality and interpretation using computers. BJOG Int. J. Obstet. Gynaecol. 121, 9–13. doi:10.1111/1471-0528.13151
Sugihara, G., and May, R. M. (1990). Nonlinear forecasting as a way of distinguishing chaos from measurement error in time series. Nature 344, 734–741. doi:10.1038/344734a0
Sugihara, G., May, R., Ye, H., Hsieh, C.-h., Deyle, E., Fogarty, M., et al. (2012). Detecting causality in complex ecosystems. Science 338, 496–500. doi:10.1126/science.1227079
Sugihara, G., Park, J., Deyle, E., Saberski, E., Smith, C., and Ye, H. (2020). Empirical dynamic modeling.New York: Springer.
Tabor, M., and Weiss, J. (1981). Analytic structure of the lorenz system. Phys. Rev. A 24, 2157–2167. doi:10.1103/physreva.24.2157
Takens, F. (1981). “Detecting strange attractors in turbulence,” in Dynamical systems and turbulence, warwick 1980 (Springer), 366–381.
Takens, F. (1985). “On the numerical determination of the dimension of an attractor,” in Dynamical systems and bifurcations (Springer), 99–106.
Titsias, M., and Lawrence, N. D. (2010). “Bayesian Gaussian process latent variable model,” in Proceedings of the Thirteenth International Conference on Artificial Intelligence and Statistics, Sardinia, Italy, May 13–15, 2010, 844–851. JMLR Work-shop.
Warmerdam, G., Vullings, R., Van Laar, J. O., Bergmans, J., Schmitt, L., Oei, S., et al. (2016). Using uterine activity to improve fetal heart rate variability analysis for detection of asphyxia during labor. Physiol. Meas. 37, 387–400. doi:10.1088/0967-3334/37/3/387
Warmerdam, G., Vullings, R., Van Laar, J., Bergmans, J., Schmitt, L., Oei, S., et al. (2018). Detection rate of fetal distress using contraction-dependent fetal heart rate variability analysis. Physiol. Meas. 39, 025008. doi:10.1088/1361-6579/aaa925
Wismüller, A., Wang, X., Dsouza, A. M., and Nagarajan, M. B. (2014). A framework for exploring non-linear functional connectivity and causality in the human brain: Mutual connectivity analysis (mca) of resting-state functional mri with convergent cross-mapping and non-metric clustering. arXiv preprint arXiv:1407.3809.
Keywords: attractor manifold, cardiotocography, empirical dynamic modelling, fetal heart rate, uterine activity
Citation: Feng G, Heiselman C, Quirk JG and Djurić PM (2023) Cardiotocography analysis by empirical dynamic modeling and Gaussian processes. Front. Bioeng. Biotechnol. 10:1057807. doi: 10.3389/fbioe.2022.1057807
Received: 30 September 2022; Accepted: 28 December 2022;
Published: 12 January 2023.
Edited by:
Yiping Chen, Huazhong Agricultural University, ChinaReviewed by:
Gabriel Davis Jones, Medical Sciences Division, University of Oxford, United KingdomJieyun Bai, Jinan University, China
Copyright © 2023 Feng, Heiselman, Quirk and Djurić. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Guanchao Feng, Z3VhbmNoYW8uZmVuZ0BzdG9ueWJyb29rLmVkdSYjeDAyMDBhOw==; Petar M. Djurić, cGV0YXIuZGp1cmljQHN0b255YnJvb2suZWR1