 Zongshan Wang1,2
Zongshan Wang1,2 Hongwei Ding1,2*Jingjing Yang1,2Peng Hou3Gaurav Dhiman4,5,6Jie Wang7Zhijun Yang1,2Aishan Li8
Hongwei Ding1,2*Jingjing Yang1,2Peng Hou3Gaurav Dhiman4,5,6Jie Wang7Zhijun Yang1,2Aishan Li8- 1School of Information Science and Engineering, Yunnan University, Kunming, China
- 2University Key Laboratory of Internet of Things Technology and Application, Kunming, China
- 3School of Computer Science, Fudan University, Shanghai, China
- 4Department of Electrical and Computer Engineering, Lebanese American University, Byblos, Lebanon
- 5Department of Computer Science and Engineering, University Centre for Research and Development, Chandigarh University, Gharuan, India
- 6Department of Computer Science and Engineering, Graphic Era Deemed to be University, Dehradun, India
- 7School of Mechanical and Power Engineering, Zhengzhou University, Zhengzhou, China
- 8Rackham Graduate School, University of Michigan, Ann Arbor, MI, United States
Salp swarm algorithm (SSA) is a simple and effective bio-inspired algorithm that is gaining popularity in global optimization problems. In this paper, first, based on the pinhole imaging phenomenon and opposition-based learning mechanism, a new strategy called pinhole-imaging-based learning (PIBL) is proposed. Then, the PIBL strategy is combined with orthogonal experimental design (OED) to propose an OPIBL mechanism that helps the algorithm to jump out of the local optimum. Second, a novel effective adaptive conversion parameter method is designed to enhance the balance between exploration and exploitation ability. To validate the performance of OPLSSA, comparative experiments are conducted based on 23 widely used benchmark functions and 30 IEEE CEC2017 benchmark problems. Compared with some well-established algorithms, OPLSSA performs better in most of the benchmark problems.
1 Introduction
In recent years, metaheuristics have received incredible attention worldwide, and their great success on global optimization tasks has established superb beliefs for researchers, motivating them to develop more algorithms with good performance. Basically, metaheuristics are classified into four categories, namely swarm-based, human-based, evolution-based and physics-based approaches. Among them, swarm intelligence-based methods have attracted most enthusiastic admiration, and they usually metaphorically represent some unique swarming behavior of organisms in the nature. The most classical swarm intelligent algorithm, particle swarm optimization (PSO) algorithm (Kennedy and Eberhart, 1995), mimics the flocking behavior of birds as they fly through the sky. Artificial bee colony (ABC) algorithm (Karaboga and Basturk, 2007; Wang et al., 2020), inspired by the collaborative honey-harvesting behavior of bees, has also captured widespread attention and has been successfully applied to solve real-word problems. The ant colony optimization (ACO) algorithm (Blum, 2005) is motivated by the phenomenon that ant colonies transmit information by secreting pheromones to accomplish foraging. The ACO algorithm is admired by researchers because of its unique advantages in solving business travel problems. Besides, many excellent nature-inspired swarm intelligent approaches have been validated to be effective in tricky global optimization projects, they include but are not limited to: bat algorithm (BA) (Yang and Gandomi, 2012), krill herd optimization (KHO) (Gandomi et al., 2012), cuckoo search (CS) algorithm (Gandomi et al., 2013), fruit-fly optimization algorithm (FOA) (Mitić et al., 2015), grey wolf optimizer (GWO) (Mirjalili et al., 2014), moth-flame optimization (MFO) (Mirjalili, 2015), grasshopper optimization algorithm (GOA) (Abualigah and Diabat, 2020), whale optimization algorithm (WOA) (Mirjalili and Lewis, 2016), marine predators algorithm (MPA) (Faramarzi et al., 2020a), white shark optimizer (WSO) (Braik et al., 2022), starling murmuration optimizer (SMO) (Zamani et al., 2022), harris hawks algorithm (Heidari et al., 2019), squirrel search optimization (SSO) algorithm (Jain et al., 2019), dragonfly algorithm (DA) (Mirjalili, 2016), chimp optimization algorithm (ChOA) (Khishe and Mosavi, 2020), rat swarm algorithm (RSA) (Dhiman et al., 2021), Animal migration optimization (AMO) (Li et al., 2014), butterfly optimization algorithm (BOA) (Arora and Singh, 2019), emperor penguin optimizer (EPO) (Dhiman and Kumar, 2018), tunicate swarm algorithm (TSA) (Kaur et al., 2020), horse herd optimization algorithm (HOA) (MiarNaeimi et al., 2021), monarch butterfly optimization (MBO) (Wang et al., 2019), firefly algorithm (Fister et al., 2013; Wang et al., 2022a), and seagull optimization algorithm (SOA) (Dhiman and Kumar, 2019).
Swarm intelligent algorithms have emerged in various scientific and engineering fields, they are based on different metaphors, and their mathematical models consequently differ, which correspond to distinctive search mechanisms. Nevertheless, the framework of these algorithms is broadly the same, all divided into two phases: exploration (cohesion) and exploitation (alignment) (Wang et al., 2022b). In the exploration phase, it is encouraged to maximize the stochasticity of the search agents, which is related to the global search process. In the later iteration, the algorithm shifts from exploration to exploitation, refining the promising regions that have already been explored, which is pertinent to the local search process. Balancing these two phases is a core essential and challenging task for metaheuristic techniques.
Recently, a novel nature-inspired swarm intelligent technique, namely salp swarm algorithm (SSA) (Mirjalili et al., 2017), has been reported by Mirjalili in 2017. SSA simulates the distinctive foraging and navigation behaviors of the marine biological salps. The framework is mainly based on the leader-follower mechanism of the salp swarm. Compared with other population intelligence-based approaches, SSA has many advantages, such as fewer control parameters, easy implementation, and special search pattern. Prior studies have shown that SSA displays better performance than other metaheuristic techniques on numerical optimization problems and engineering design cases. Therefore, SSA is favored and employed to tackle various optimization problems. In (Ewees et al., 2021), Ewees et al. enhanced SSA algorithm using firefly search mechanism for solving unrelated parallel machine scheduling problem. In (Xia et al., 2022), Xia et al. proposed barebone SSA algorithm, and embedded quasi-oppositional based learning strategy. The developed SSA variant was used in medical diagnosis systems. In (Ozbay and Alatas, 2021), Ozbay et al. added inertia weights to the standard SSA to improve the ability of the algorithm to find the optimal solution and utilized the boosted SSA for fake news detection and obtained satisfactory results. In, Faris et al. (2018) introduced a binary version of SSA with a crossover mechanism for feature selection problems. In, Tu et al. (2021) proposed a quantum-behaved SSA approach and studied the application of the advocated approach in wireless sensor networks. In, Wang et al. (2021) developed an improved SSA with opposition based learning mechanism and ranking-based learning strategy for global optimization problems and PV parameter extraction task.
Although the SSA algorithm has shown excellent performance on global optimization problems, it still suffers from premature convergence and insufficient solution accuracy when large-scale optimization tasks and complex restricted engineering design issues. To address these limitations of the standard SSA, many high-performance SSA-based algorithms have been developed. In, Ding et al. (2022) developed a velocity-based SSA algorithm. The proposed algorithm enhances the search efficiency of SSA by limiting the maximum speed of the algorithm. Furthermore, an adaptive mechanism was added to the SSA to balance the exploration and exploitation ability. The introduced algorithm was tested using the CEC 2017 benchmark suite. Experimental results show that the velocity-based SSA algorithm outperforms all competitors. Finally, the proposed algorithm is employed to solve the mobile robot path planning task, and the results show that the algorithm is able to plan reasonable collision-free path for the robot. In (Çelik et al. (2021), devised three simple but efficacious strategies to improve the performance of the standard SSA. First, the control parameter is amended chaotically to enhance the tradeoff between exploration and exploitation. Then, a new mutualistic phase is injected to augment the information exchange between leading salps. Finally, stochastic techniques are applied to improve the dynamics among the followers. In, Chen et al. (2022) made three adjustments to the basic SSA. Opposition-based learning technique is adopted to enrich the population diversity. The leader location update formula is modified to help the salp chain jump out of sub-optimal solution. A social learning tactic inspired by PSO is introduced to accelerate the convergence of the optimizer. In, Zhang et al. (2021) introduced a mutual learning mechanism in the exploitation phase of SSA to improve its performance, and used a tangent factor to update the location of the search agent. In, Wang et al. (2022c) designed an orthogonal quasi-opposition-based learning structure to avoid the population from falling into local optima. Moreover, a dynamic learning paradigm is proposed to effectively improve the search pattern of the followers. In (Bairathi and Gopalani, 2021), Bairathi et al. proposed a boosted version of SSA for complex multimodal problems. First, stochastic opposition-based learning is used to enhance the ability to search for unknown regions. Then, multiple search agents are employed to serve as leaders instead of one to intensify the global search ability. Finally, it is compounded with the simulation annealing algorithm to improve the local development ability. In, Singh et al. (2022) proposed a hybrid algorithm of HHO and SSA to cover the unbalanced local search and global exploration of the basic SSA.
Many existing SSA variants focus mainly on alleviating the shortcomings of lack of convergence accuracy and unbalanced exploitation and exploration suffered by the basic SSA. For this purpose, different strategies have been injected into SSA and achieved remarkable results. However, these two limitations have not been completely solved and there are still research gaps. Moreover, the “No Free Lunch” theorems (Wolpert and Macready, 1997) logically proves that it is impossible to expect one algorithm to solve all optimization problems. That is to say, while each algorithm has some unique characteristics along with shortcomings. Even for reputable algorithms, they still have some limitations. For example, AMO is a classical metaheuristic algorithm inspired by animal migration behavior. This optimizer can effectively improve the initial random population and converge to the global optima. It has many advantages, including simple search pattern, easy to implement, and strong global optimization ability. Thanks to the success of the AMO algorithm, it has been applied to many different optimization problems, such as clustering (Hou et al., 2016), the optimal power flow problem (Dash et al., 2022), and multilevel image thresholding (Rahkar Farshi, 2019). However, as most metaheuristic techniques, it suffers from premature convergence and often falls into optima. To solve this drawback, many AMO variants have been proposed, such as the opposition-based AMO (Cao et al., 2013), and Lévy flight assisted AMO (Gülcü,, 2021). Differential evolution (DE) (Storn and Price, 1997) is a global search algorithm, which simulates the biological process in the nature. In DE algorithm, individuals repeatedly perform mutation, crossover, and selection to guide the search process to gradually approach the global optima solution. Because of its simplicity and effectiveness, it has received a lot of attention and has been applied to solve many real-world problems (Wang et al., 2022d). However, DE has some limitations, such as unbalanced exploration and exploitation ability and being sensitive to the selection of the control parameters. To alleviate these drawbacks, Li et al. (2017) proposed a Multi-search DE algorithm with three adjustments. First, the population is divided into multiple subpopulations and the subpopulation group size is dynamically adjusted. Second, three effective mutation strategies are proposed to take on the responsibility for either exploitation or exploration. Finally, a novel parameter adaptation method is designed to solve the automatically adjust the algorithmic parameters. However, there is no mechanism in this DE variant for large-scale problems, which will result in its performance will still be restricted by the phenomenon of “curse of dimensionality” as the number of dimensions increase. The CS is an effective optimization algorithm with two features that make it stands out against other metaheuristic techniques. First, it uses a mutation function based on Lévy flight to improve the quality of the randomly selected solutions at each iteration. Second, it uses one parameter called abandon fraction that does not require fine-tuning. However, CS suffers from the drawback of being prone to premature convergence (Zhang et al., 2019). To address this limitation, many CS variants were developed. For example, Li et al. (Li and Yin, 2015) used two novel mutation rules and the new rules were combined by a linear decreasing probability rule to balance the exploitation and exploration of the algorithm. Further, the parameter setting was adjusted to enhance the diversity of the population. The performance of the developed CS-based method was tested using 16 classical test functions. Experimental results show that the introduced approach performs better than its competitors, or at least comparable to the peer algorithms. However, according to the statistical results, the proposed algorithm still suffers from the drawback of insufficient convergence accuracy. In this paper, a novel SSA variant called OPLSSA is introduced considering the above two considerations. First, a novel pinhole-imaging opposition-based learning mechanism is deigned and combined with the orthogonal experimental design for effectively enhancing the global exploration ability. Second, the follower update pattern is modified by introducing adaptive inertia weights to provide dynamic search with adaptive mechanism. Comprehensive comparison experiments on 23 widely used numerical test functions and 30 CEC 2017 benchmark problems demonstrate that the proposed approach outperforms the traditional SSA, popular SSA-based methods, and well-established population-based intelligent algorithms.
The remainder of this work is structured as follows: The standard SSA, including the principle, mathematical model and shortcoming analysis, is presented in Section 2. The developed modifications and the advocated OPLSSA algorithm are described in detail in Section 3. The effectiveness of the proposed approach is verified by comparison experiments in Section 4. Finally, the conclusions and future tasks are provided in Section 5.
2 The original salp swarm algorithm
2.1 Description of salp swarm algorithm
The SSA algorithm is a well-established swarm intelligent approach inspired by the unexplained behavior of salp swarm that organize in chains to improve foraging efficiency in oceans. SSA, resembling other population intelligence-based methodologies, commences its search process with a suit of randomly generated search agents, each of which indicates a solution to the pending problem. SSA compartmentalizes the salp population into two groups: leaders and followers. The leader is the key member, which plays a leadership role and at the front of the chain to lead the population in search of food. The followers, on the other hand, move implicitly or outright along the trajectory of the leader.
In SSA, the leading salp changes position depending on the following formula.
where X1, j and Fj are the locations of the leader and the food source, respectively, c2 is a random vector, c3 is a random value, all taking values between the interval [0,1], and c1 is the key parameter that regulates the transformation of the algorithm from the exploration in the initial iteration to the exploitation in the later search stages, which is calculated according to the following equation.
where l and L denote the current iteration and the maximum iteration, respectively.
The mathematical equation used to change the followers’ positions is as follows:
where Xi,j indicates the location of the i-th follower in the jth dimensional search landscape.
Algorithm 1 outlines the pseudo code of the basic SSA.
Algorithm 1. Q-Pseudocode of SSA.
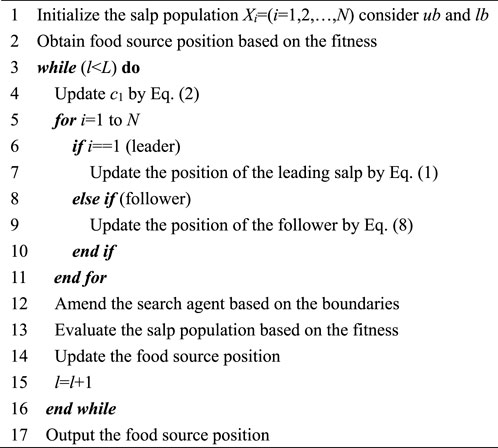
The SSA approach begins the search with a reservation number of randomly generated search agents, and subsequently continuously updates the population position according to the objective value of the optimized function. The fitness of the population is evaluated after each iteration and the best individual is assigned as the current food source, which is the desired goal pursued by the leader, and the followers intuitively or implicitly follow the leading salp, the salp chain thus continuously approaching the food source. Notably, the value of the control parameter c1 decreases nonlinearly after the lapse of iterations, and the salp chain accordingly switches from moving in large steps to explore the search space to traveling gradually to exploit the already discovered potential areas. The salp swarm repeatedly searches following the aforementioned pattern until the cessation criterion is encountered, at which point the food source is the expected optimal solution.
2.2 Analysis of the shortcomings of salp swarm algorithm
In this subsection, we analyze the key limitations of the basic SSA, which is the inference and motivation behind the current work. The details are as follows:
1) First of all, there is only one parameter c1 to be updated in the basic SSA, which is used to control the movement of the leader and thus maintain a more stable balance between exploration and exploitation. However, strong stochastic factors break this expectation. The food source could not guide the leader salp to the more promising search region as expected, resulting in the algorithm not being able to switch search modes smoothly during the search process, which also reduced the convergence speed.
2) Second, the position update equation of the followers in SSA does not have any control parameters, and although this can reduce the computational cost, it will make this movement mechanism sluggish and the algorithm is thus prone to fall into local optimum.
3) In addition, adaptive is a novel and effective technique that helps the algorithm to adjust the movement pattern autonomously during the search process, however, such operator is lacking in SSA.
4) Finally, maintaining a desirable balance between exploitation and exploration is the goal pursued by all swarm-based intelligence techniques, and a lot of research has focused on enhancing the capability of SSA algorithms in this regard to strengthen its overall performance, but there is still a gap in this context.
The above analyzed weak points of SSA have promoted the authors to discern that the algorithm has some drawbacks to be rectified, and this is the motivation behind proposing a novel version of SSA. Each of the embedded adjustments will be described in detail in the next section.
3 Essentials of the OPLSSA
As discussed previously, the swarm intelligent algorithm covers two phases, namely exploration and exploitation. Exploration maintains a superiority in global search, and the strong exploration capability is conductive to improving the convergence speed. On the other hand, the domain nature of exploitation is shown in the local search, and the powerful development capability is beneficial to boost the convergence accuracy. Maintaining a proper equilibrium between exploration and exploitation holds a key position in the performance of swarm intelligent approaches, which is also a research gap that the current community tries to bridge. In this study, two straightforward but applicable mechanisms are integrated into SSA to produce an enhanced balanced SSA variants with better performance. This section provides an in-depth discussion of the designed components and the OPLSSA algorithm.
3.1 Orthogonal pinhole-imaging-based learning
In standard SSA, according to the location changing pattern of the leading salp, a prospective candidate search agent location is gained by directing the leader to the food source. Followers chase the leader explicitly or indirectly, gathering near the perceived global optimum in the later phase of the search. As a result, the standard SSA is inclined to converge prematurely. Therefore, improving the ability of the approach to avoid local optima has been considered as the most critical and necessary research goal in SSA improvement. To enhance the global exploration ability of swarm intelligent metaheuristic techniques, the most common method used in the published literatures is opposition-based learning (OBL). For example, Abualigah et al. (2021) revised the search pattern of the slime mould algorithm (SMA) (Li et al., 2020) by incorporating the OBL mechanism. Dinkar et al. (2021) used the OBL technique to accelerate the convergence rate of equilibrium optimizer (EO) (Faramarzi et al., 2020b), and the reported OBL-based EO approach was used for multilevel threshold image segmentation. Yu et al. (2021) included an additional OBL phase in the GWO algorithm to help the wolves jump to reverse individuals to enhance the exploration of the search space. Yildiz et al. (2021) mixed OBL with GOA algorithm to improve the ability of the algorithm to exploit unknown regions. In the proposed algorithm, elite individuals generate corresponding elite reverse individuals through the OBL strategy and retain well-quality individuals for the next iteration. Chen et al. (2020) employed quasi-opposition-based learning (QOBL), an OBL variant, to create dynamic jumps during the location update of the WOA algorithm to prevent the algorithm from falling into local optima.
Pinhole imaging is a general physical phenomenon in which a light source passes through a small hole in a plate and an inverted real image is formed on the other side of the plate. Motivated by the discovery that there are close similarities between the pinhole imaging phenomenon and the OBL mechanism, this paper proposes a pinhole-imaging-based learning (PIBL) mechanism and applies it to the current leader to augment the exploration capability of SSA for unknown areas. Figure 1 plots the schematic diagram of the PIBL.
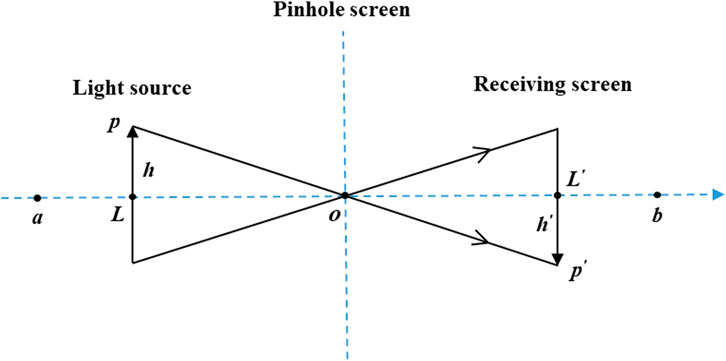
FIGURE 1. The schematic diagram of PIBL on the leading salp.
In Figure 1, p is a light source of height h, and its projection on the x-axis is L. Place a pinhole screen on the base point o, and the real image p′ formed by the light source through the pinhole screen will fall on the receiving screen on the other side. It is worth noting that p′ is the inverted image of p, and the height of p′ from the x-axis is h′. At this point, L jumps to L′ based on pinhole imaging principle. Therefore, from the pinhole imaging principle, it can be derived that
Let h/h’ = n, Eq. 9 can be rewritten as
Equation 6 is the original OBL strategy on the leading salp. Clearly, OBL is very similar to PIBL. In other words, PIBL can be treated as a dynamic version of OBL.
Generalizing Eq. 5 to the D-dimensional spatial, it can be obtained
where Lj and L′ j are the jth dimensional values of the leader and the PIBL leader, respectively.
In this paper, we use the proposed PIBL mechanism to help the leader search for unknown regions, thus improving the global search ability of the algorithm and avoiding the premature convergence due to the lack of exploration capability. However, similar to OBL, PIBL also suffers from the problem of “dimensional degradation”, i. t., the current leader improves only in some dimensions after jumping to the PIBL leader, while some other dimensions are even farther from the global optimum. To solve this problem, we introduce orthogonal experimental design (OED) and combine it with the PIBL strategy to design the orthogonal pinhole-imaging-based learning (OPIBL) mechanism.
The OED is an auxiliary tool that can find the optimal combination of experiments by a reasonable number of trials. For example, for an experiment with 3 levels and 4 factors, it would take 81 attempts using a trial-and-error approach. In contrast, by adopting an OED, only 9 sets of representative combinations need to be evaluated to determine the optimal combination of the experiment. L9 (34) is shown in Table 1.
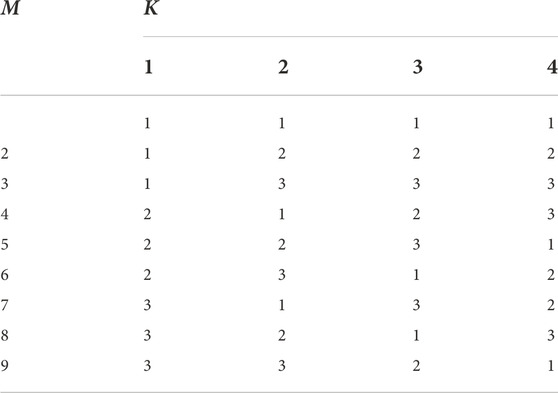
TABLE 1. Orthogonal array of L9 (34).
In each iteration, the OPIBL mechanism is used for the leader, the dimension of the problem to be solved is considered as the factor of the OED, and the leader and the PIBL leader are regarded as the two levels of the OED. The designed OPIBL mechanism considers the information of the current leader and the PIBL leader, and retains the respective dominant dimensions to combine as a promising partial PIBL individual, called OPIBL leader. In this way, the OPIBL mechanism can effectively avoid the “dimensional degradation” problem caused by PIBL and significantly help the leader to quickly approach the global optimal solution. To visualize the process of the leader jumps to OPIBL leader, we consider a 7-dimensional problem and draw the schematic diagram of the leader jumps to the OPIBL leader according to L8 (27), as shown in Figure 2.
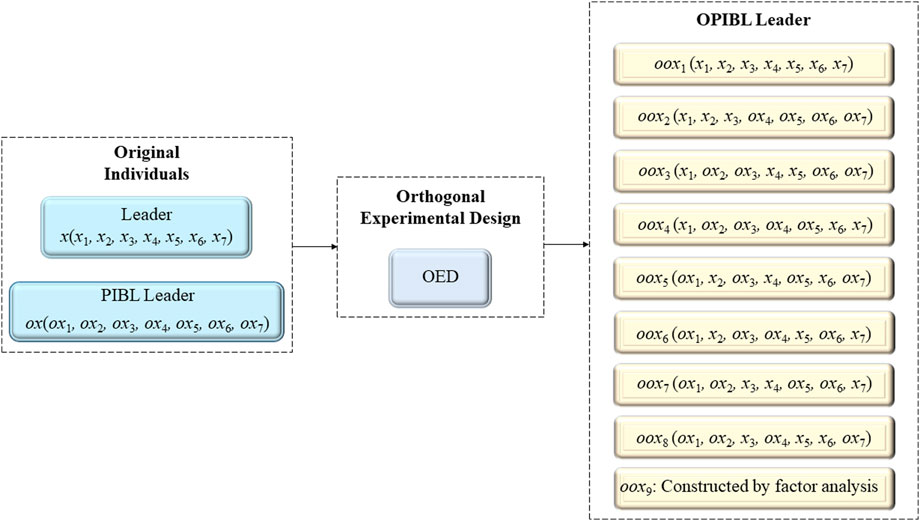
FIGURE 2. Construct OPIBL leader.
In order not to increase the computational complexity of the algorithm, only the leader executes the OPIBL operation. Then, evaluate both the current leader and the OPIBL leader, and reserve the high-quality search agent.
3.2 Adaptive conversion parameter strategy
For nature-inspired swarm intelligent algorithms, strong exploration capability is beneficial to improve the convergence speed, while powerful exploitation ability is conductive to refine the convergence accuracy. Maintaining a proper balance between exploration and exploitation can effectively boost the overall performance of the algorithm, which is a research difficulty that the metaheuristic community has been trying to conquer with great effort. In the basic SSA, the follower updates its position according to Eq. 3. This equation is control parameter-free, the current follower salp only considers its own position and the position of neighboring individual to calculate the next location. Although this mechanism makes SSA more consistent with the advocated minimalism, this rigid position update pattern tends to deviate the population from the global optimum. Furthermore, it is unreasonable that the followers move without utilizing the current global optimal position. To address this issue, many studies have focused on modifying the follower position update equation to enhance the dynamic nature.
Based on the above analysis, this paper proposes an adaptive position update mechanism for follower salps to replace the original formula, namely
where ω is an inertia weight factor.
In PSO, the inertia weight coefficient factor changes dynamically during the search process to help the algorithm switch between exploitation and exploration operations. With the progress of the research on metaheuristic techniques, the inertia weight has been introduced into many swarm intelligence-based approaches to improve their performance. For example, GU et al. (2022) implemented the inertia weight to tune the particle’s search behavior in chicken swarm algorithm (CSA) (Meng et al., et al.). Jena et al. (Jena and Satapathy, 2021) used a Sigmoid adaptive inertia weight to intensify the performance of the social group optimization (SGO) (Naik et al., 2018). Inspired by the above studies, a novel inertia weight coefficient is proposed in this work with the following mathematical expression:
where λ is a constant number, ωmax and ωmin are the maximum and minimum values of the inertia weight coefficient, respectively.
Figure 3 plots the schematic diagram of the nonlinear decrease of the inertia weight during the iterative process. From the figure, in the initial stage, the value of ω is larger, and the particle accordingly moves in larger steps in the search space, which is beneficial to the global search. After the lapse of iterations, ω nonlinearly decreases and the particle moves in shorter steps correspondingly, which is advantageous for fine exploit the already explored promising area to improve the convergence accuracy.
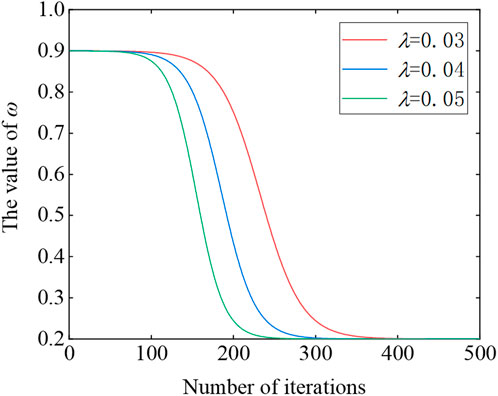
FIGURE 3. The inertia weight ω curve.
3.3 The flowchart of OPLSSA
In summary, Figure 4 shows the flow chart of the developed OPLSSA algorithm.
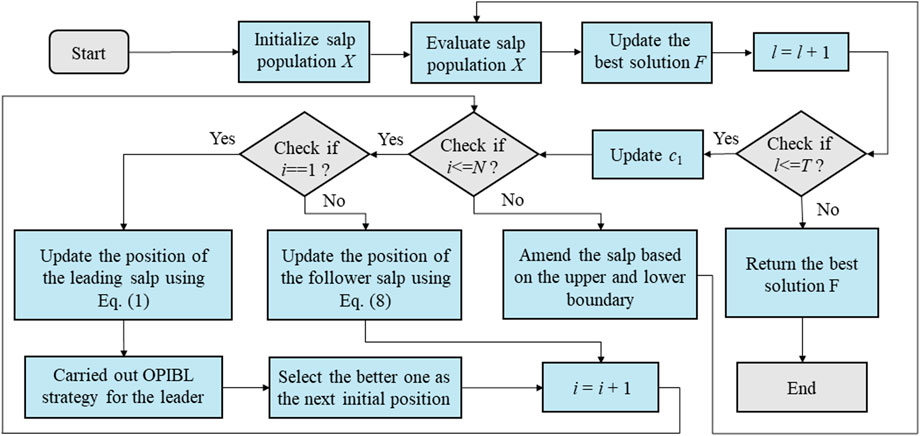
FIGURE 4. The flow chart of OPLSSA.
4 Simulations and comparisons
In this section, 23 classical benchmark test functions are solved using the OPLSSA algorithm to synthetically verify its effectiveness and applicability. The results obtained by the proposed approach on the test cases are recorded and compared with some well-established metaheuristic techniques, including the basic SSA, the forefront swarm intelligent algorithms, and the popular SSA variants. All experiments were implemented under MATLAB 2016b software, operating system used is Microsoft WINDOWS 10 64-bit Home, and simulations supported by Intel (R) Core (TM) i7-7700 CPU at 3.60 GHz with 8.00 GB RAM.
4.1 Experiments on well-known benchmark functions
In this subsection, the selected 23 benchmark functions that include both multimodal and unimodal functions are reported, as shown in Table 2, where Search range represents the boundary of the function search space, and fmin is the best value. Among them, f1-f11 are unimodal functions, and they are mainly complex spherical or valley value problems. They have only one global optimal solution in the search range but are difficult to find. Therefore, it can be used to test the convergence efficiency and exploration ability of each algorithm. Different from the unimodal functions, the multimodal functions (f12-f23) have multiple local extremes in the search space. Moreover, the scale of this type of problem will increase exponentially as the dimensionality increases. Therefore, the multimodal problem can effectively test the abilities of each algorithm to search globally and to jump out of local optima (Long et al., 2021).
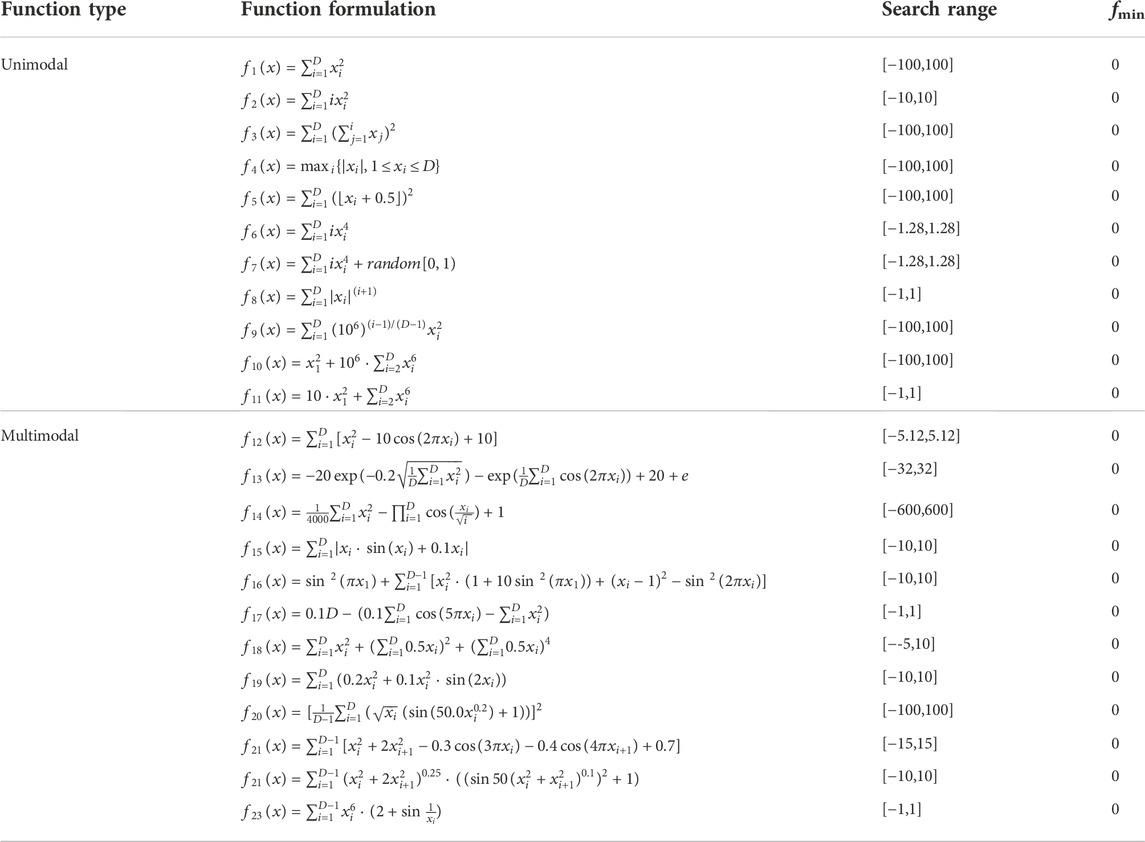
TABLE 2. The characteristics of the classical benchmark functions.
4.1.1 Compared against salp swarm algorithm and salp swarm algorithm variants
To test the performance of the advocated OPLSSA algorithm, 23 classical benchmark functions reported in Table 2 were employed. The dimensions of the involved problems were set to 100. The obtained results were compared with the standard SSA and seven representative SSA variants, including the self-adaptive SSA (ASSA) (Salgotra et al., 2021), adaptive SSA with random replacement strategy (RDSSA) (Ren et al., 2021), lifetime tactic enhanced SSA (LSSA) (Braik et al., 2020), the Gaussian perturbed SSA (GSSA) (Nautiyal et al., 2021), the intensified OBL-based SSA.
(OBSSA) (Hussien, 2021), inertia weight enhanced SSA (ASSO) (Ozbay and Alatas, 2021), and WOA improved SSA (IWOSSA) (Saafan and El-Gendy, 2021). The general parameters of the involved methods were set as recommended in the respective original literature. In OPLSSA, k = 100, λ = 0.04, ωmax = 0.55, ωmin = 0.2. The maximum number of iterations of each algorithm for each benchmark was 500, the population size was set to 30, and the number of independent runs was set to 30 to eliminate random errors. The mean value and standard variance of the results obtained from 30 runs were recorded as metrics to evaluate the performance of the algorithms. In addition, Friedman test was utilized to evaluate the average performance of the algorithms. Wilcoxon signed ranks was used as an auxiliary tool to investigate the differences between OPLSSA and its competitors from a statistical point of view. The results of the nine algorithms on the 23 tested problems are shown in Table 3, and the results of the Wilcoxon signed ranks test are reported in Table 4.
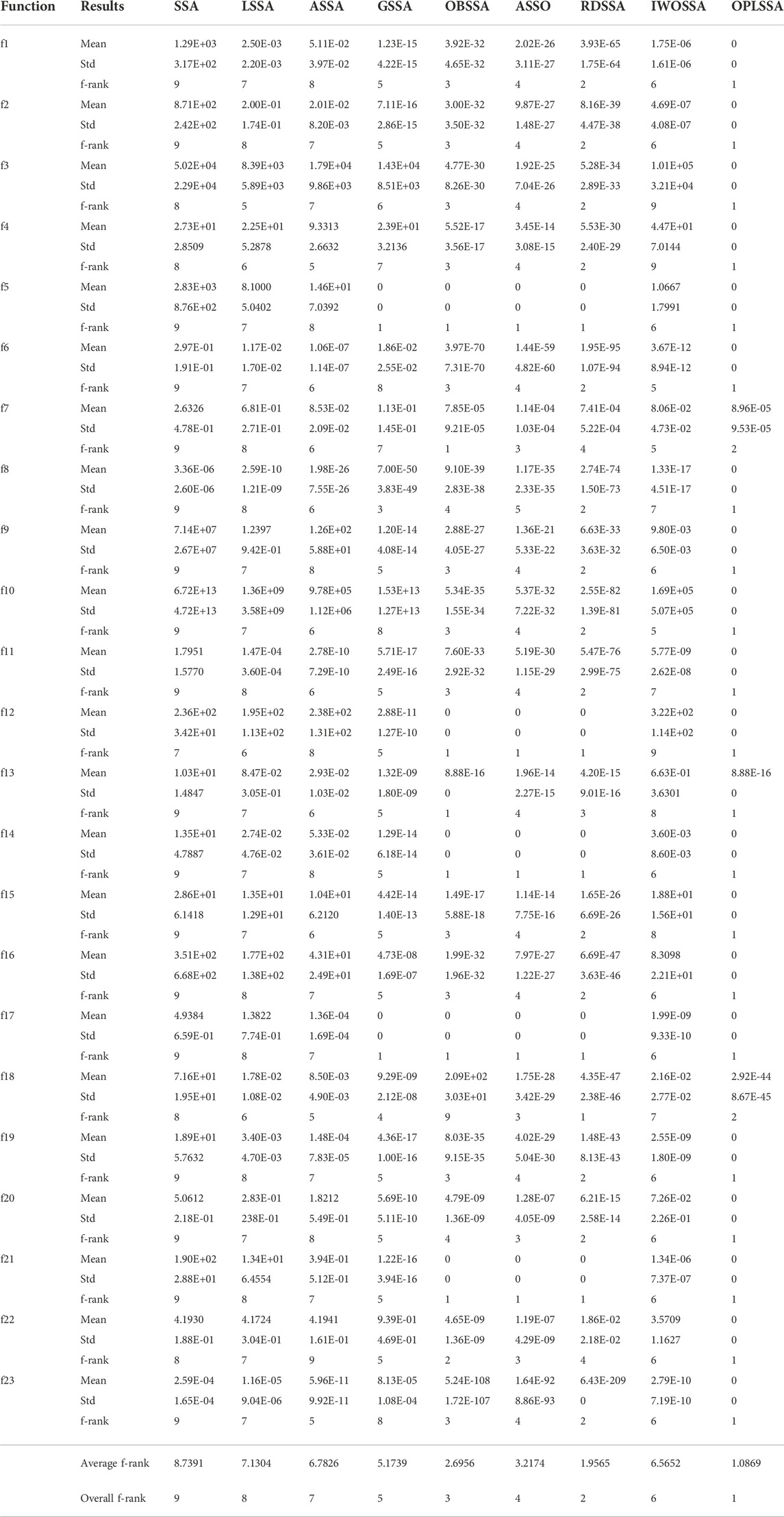
TABLE 3. Comparisons of nine algorithms on 23 test functions with 100 dimensions.
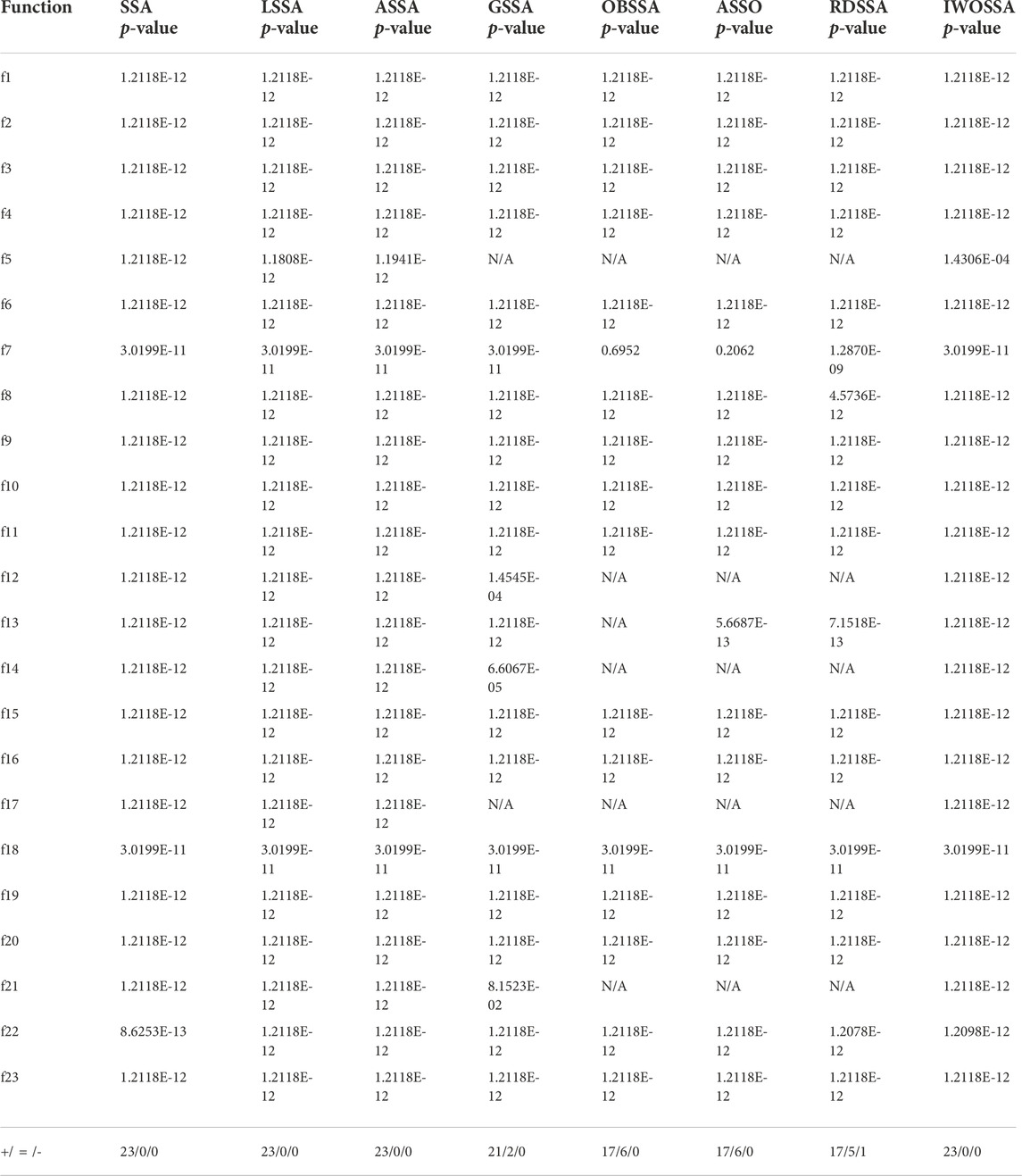
TABLE 4. Statistical conclusions based on Wilcoxon signed-rank test on 100-dimensional benchmark problems.
From Table 3, the developed OPLSSA is superior to SSA, LSSA, ASSA and IWOSSA on all test functions. Compared to GSSA, OPLSSA presents similar and better performance on two and 21 test cases, respectively. OPLSSA plays a tie with OBSSA on six benchmarks, it beats OBSSA on six functions, and on another function (i.e. f7), it is inferior to OBSSA. OPLSSAS defeats ASSO on 18 benchmarks, and on the remaining five problems, both algorithms find the theoretical optimal solution. With respect to RDSSA, OPLSSA wins on 17 test functions, ties with it on five test functions, and is defeated by RDSSA on one (i.e. f18) test function. According to the Friedman ranking achieved by the different approaches for 23 test problems, OPLSSA obtained the top rank, followed by RDSSA, OBSSA, ASSO, GSSA, IWOSSA, ASSA, LSSA and SSA. Furthermore, according to the comparison results of Wilcoxon signed ranks approach, the p-values are less than 0.05 except for two pairwise comparisons (i.e. OPLSSA versus OBSSA, OPLSSA versus ASSO), which demonstrates that OPLSSA has a significant advantage over the comparison algorithms.
Figure 5 plots the radar diagram showing the ranking of the nine SSA-based algorithms on the 23 tested functions as counted in Table 4. From the figure, OPLSSA received competitive rankings on all cases, which proves that the overall performance of the OPLSSA algorithm outperforms its competitors.
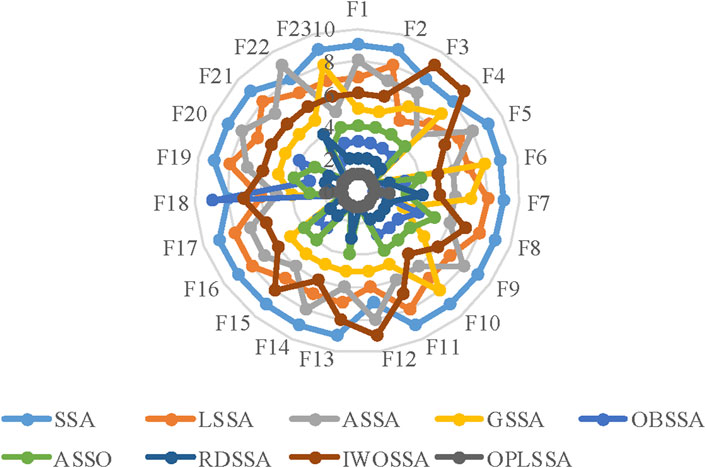
FIGURE 5. Radar plot for consolidated ranks of 23 benchmarkproblems with the SSA variants.
4.1.2 Comparison against other swarm intelligent algorithms
In this subsection, the developed OPLSSA algorithm was compared with marine predators algorithm (MPA) (Faramarzi et al., 2020a), hunger game search (HGS) algorithm (Yang et al., 2021), Improved grey wolf optimization (IGWO) algorithm (Nadimi-Shahraki et al., 2021), tunicate swarm algorithm (TSA) (Kaur et al., 2020), adaptive moth flame optimizer (WEMFO) (Shan et al., 2021), Archimedes optimization algorithm (AOA) (Hashim et al., 2021), OBL-based grey wolf optimization (OGWO) algorithm (Yu et al., 2021), diversity and mutation mechanisms enhanced moth-flame optimization (DMMFO) algorithm (Ma et al., 2021). In this comparison experiment, the 23 benchmark problems in Table 2 were employed, and the dimensions of the problems were set to 100. The parameters of the methods were set identically as in Subsection 4.1.1. Each algorithm was run 30 times independently on each function to make the obtained results more reliable. Table 5 shows the average and standard deviation of the optimal objective values obtained from the 30 executions. At the bottom of Table 5, the average ranking of the algorithms involved is presented. Table 6 reports the results gained from the Wilcoxon signed ranks test.
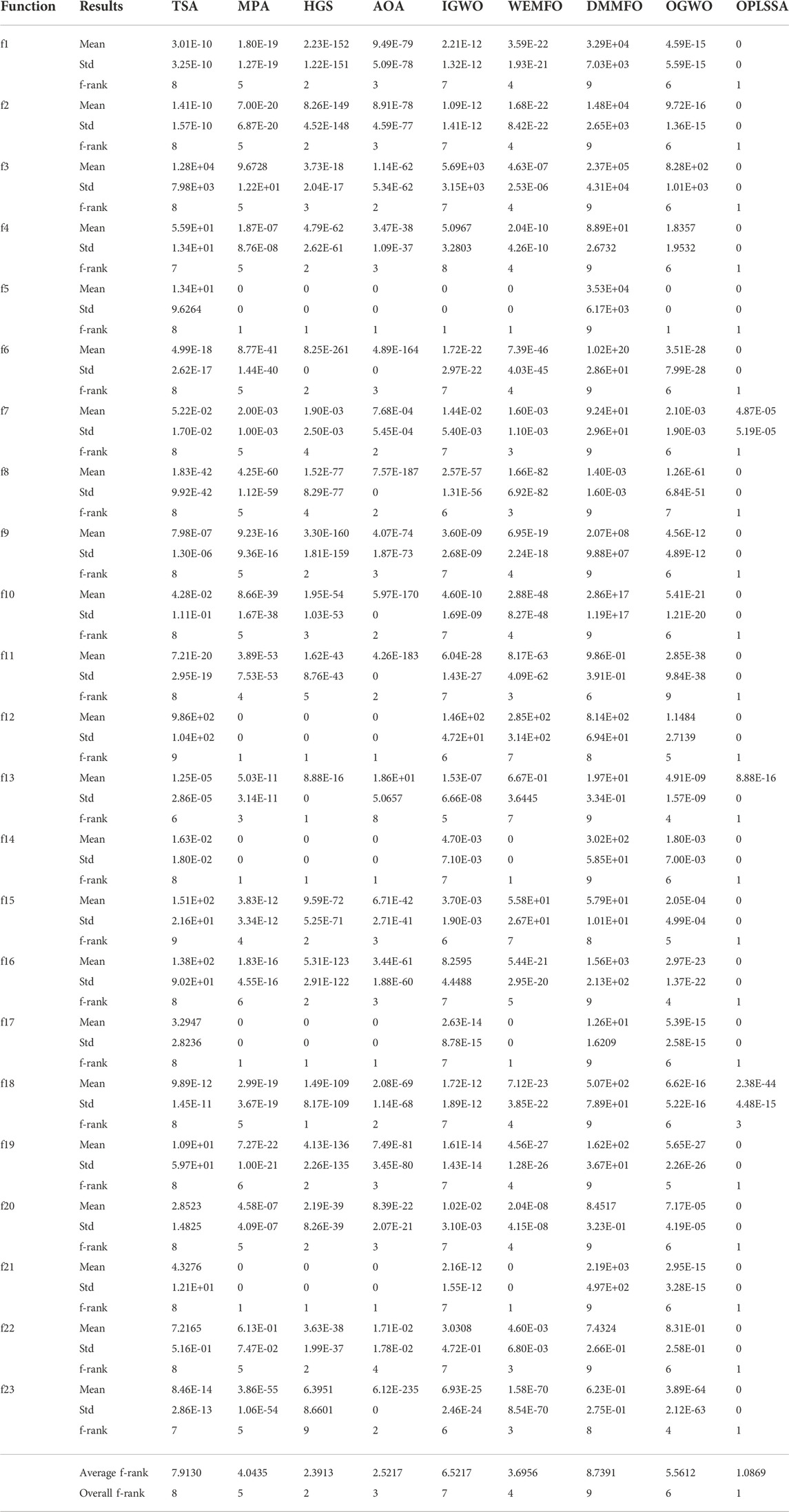
TABLE 5. Comparisons of nine algorithms on 23 test functions with 100 dimensions.
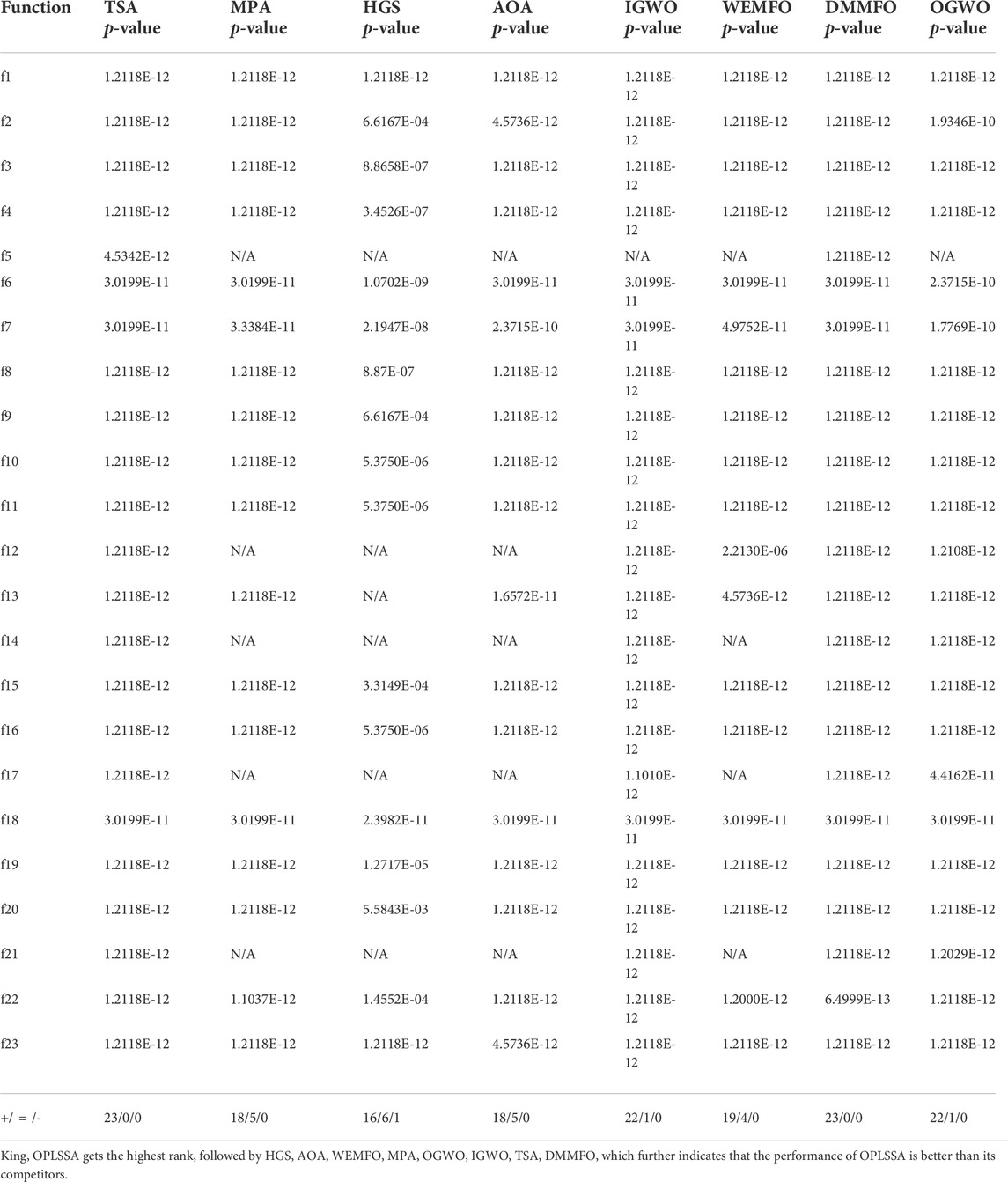
TABLE 6. Statistical conclusions based on Wilcoxon signed-rank test on 100-dimensional benchmark problems.
From Table 5, OPLSSA beats TSA and DMMFO on all cases. Compared to MPA, OPLSSA finds similar and better values on five and 18 test functions, respectively. HGS and OPLSSA reach the theoretical optimal solution on six benchmarks (i.e. f5, f12, f13, f14, f17, f21); OPLSSA shows better performance on 16 cases; on the remaining one function (i.e. f18), the OPLSSA algorithm is inferior to HGS. According to the pairwise comparison between OPLSSA and AOA, they are tied on five test functions; OPLSSA wins on 17 test cases; AOA gains advantage on only one function (i.e. f18). OPLSSA beats IGWO and OGWO on almost all benchmark functions; for f5, all three methods find the theoretical optimal solution. With respect to WEMFO, OPLSSA obtains similar and better results on four and 19 problems, respectively. According to the average ran-
Finally, from the results generated by the Wilcoxon signed ranks test, the p-values derived from all available comparisons are less than 0.05, which reveals that all differences between the performance of OPLSSA and its competitors on the utilized functions are statistically significant.
Figure 6 provides a graphical depiction in the form of a radar chart that emphasizes the average ranking of the OPLSSA approach and the eight involved Frontier swarm intelligent algorithms on the 23 tested functions. From the figure, OPLSSA achieved the highest ranking on almost all tested functions, which represents that this algorithm can be considered as a promising optimization tool.
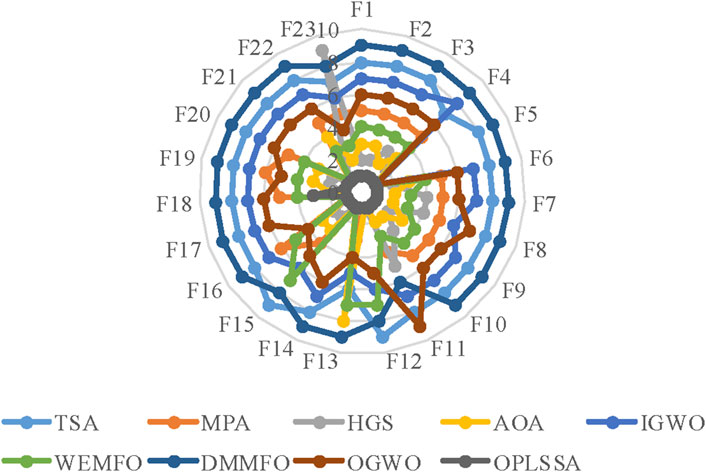
FIGURE 6. Radar plot for consolidated ranks of 23 benchmark problems with OPLSSA and the Frontier algorithms.
4.1.3 Scalability test
The performance of well-established metaheuristic algorithms will not deteriorate drastically as the dimensionality of the to-be-solved problem increases. The proposed OPLSSA algorithm aims to improve the overall performance of the basic SSA, and scalability is a key point that must be considered. In this experiment, OPLSSA was applied to address 23 benchmark functions with large scales (i.e. 10000 dimensions) in Table 2. The parameters of the algorithms were set to the same as those used in Subsection 4.1.1. To evaluate the performance of the OPLSSA method in solving challenging optimization problems with high dimensions, a novel metric called success rate (SR%) was introduced, which can be defined as
where fA is the results achieved by OPLSSA for the test function, fT stand for the theoretical optimal value of the function.
If the result obtained by the algorithm on the benchmark function satisfies Eq. 10, it means that this solution is successful and vice versa. The OPLSSA algorithm is run 30 times independently on each case and the ratio of the number of successes to the total number of runs is the SR%. Table 7 reports the optimal value, worst value, average value, standard deviation, and SR% for the 30 independent runs.
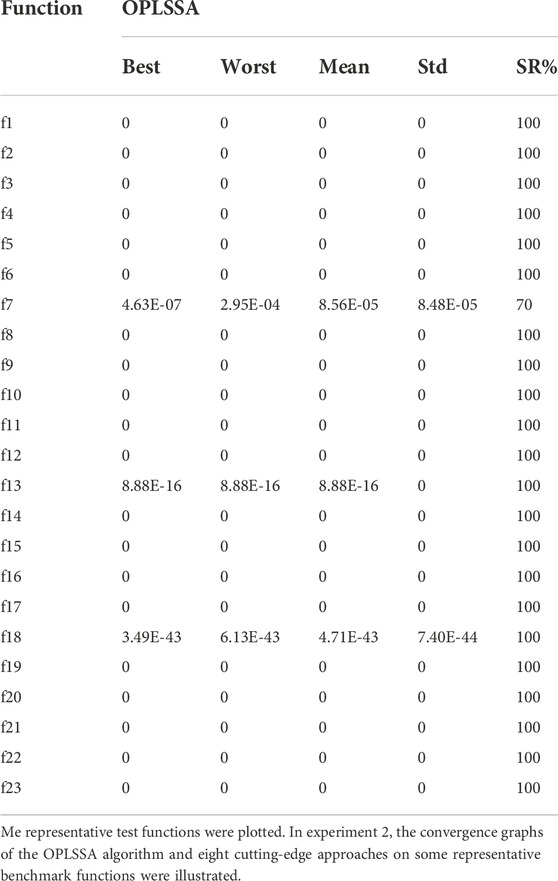
TABLE 7. Results obtained by OPLSSA on 10000-dimensional functions.
From Table 7, OPLSSA shows competitive performance in solving high-dimensional optimization problems. In terms of solution accuracy, OPLSSA is able to find the theoretical optimal solution on 20 test functions; for f7 and f13, the solutions obtained are similar to those achieved on 100-dimensioanl problems; for f18, the value derived is inferior to that found on 100-dimensional benchmark. This proves that the dramatic increase in the problem’s dimensionality does not deteriorate the performance of the OPLSSA algorithm, i.e., OPLSSA has superior stability. On the other hand, in terms of SR%, OPLSSA attains a 100% success rate on 22 high-dimensional optimization problems, representing that the developed approach has been successful in all 30 independent tests. The SR% on another function (i.e. f7) is 70%, meaning that 21 out of 30 runs achieved success. Based on the above discussion, the developed OPLSSA algorithm gets remarkable performance on large scale optimization problems.
4.1.4 Convergence analysis
A well-established swarm intelligent algorithm moves in large steps in the search space in the early iterations to locate the rough position of the global optimal solution. After the lapse of few iterations, the step size is shortened to precisely search the already explored region, thus improving the convergence accuracy. Rapid convergence rate often leads to premature convergence of the algorithm, making the solution accuracy insufficient. Improving the solution precision of the method requires performing more iterations, which will degrade the convergence speed of the algorithm. The unbalanced convergence speed and convergence precision is a weak open point that destroys the performance of the algorithm. One of the main goals of the improvements to SSA in this work is to enhance the above-mentioned balance of the basic algorithm. To investigate the performance of the OPLSSA algorithm in this regard, two additional sets of experiments were performed. For experimental purpose, some of the representative benchmarks with 100-dimensional in Table 2 were applied. The parameter settings of the employed algorithms were the same as those used in Subsection 4.1.1. In experiment 1, the convergence curves of the standard SSA algorithm and eight SSA variants on so-
By observing Figure 7, the OPLSSA algorithm is able to find more accurate solutions quickly for all functions, while the comparison algorithms are inferior to OPLSSA in terms of convergence rate and convergence accuracy. Similar phenomena can be observed on Figure 8. Overall, the OPLSSA algorithm outperforms the popular SSA variants and the cutting-edge algorithms in terms of convergence rate and convergence accuracy.
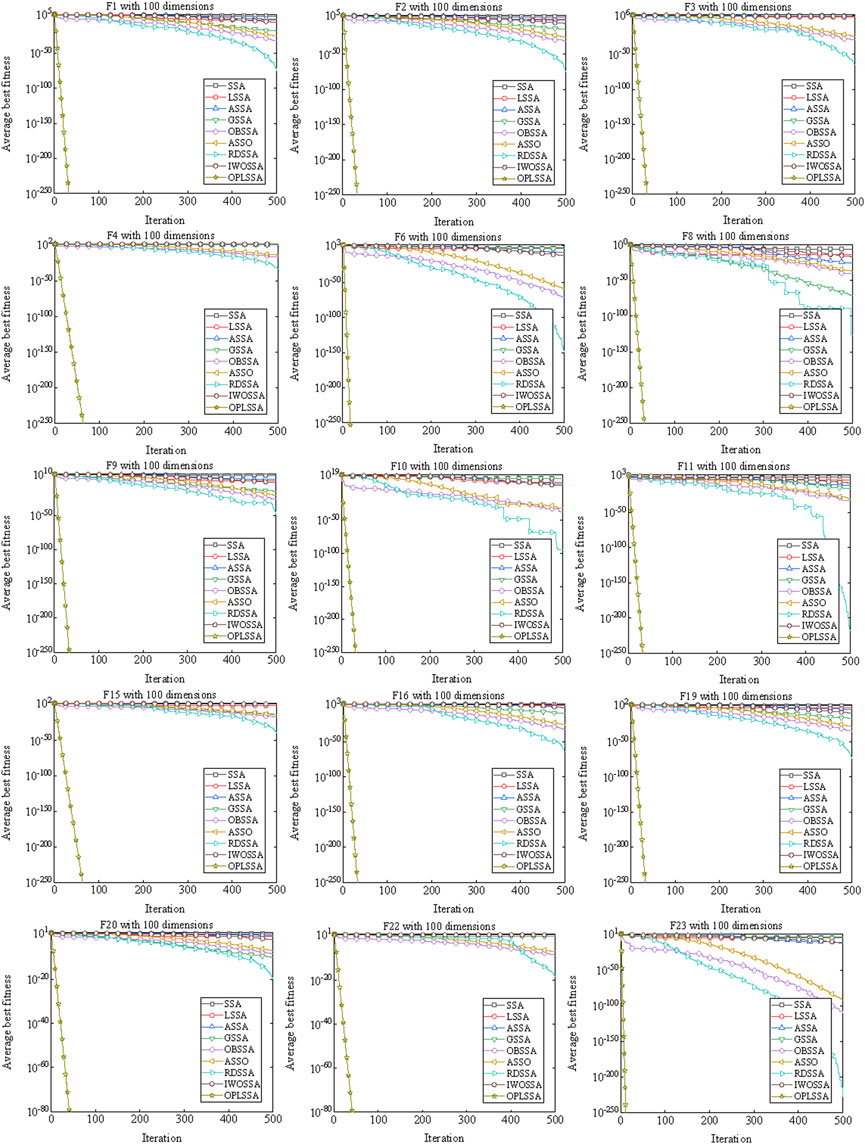
FIGURE 7. Convergence curves of OPLSSA and other SSA-based algorithms on 15 representative benchmarks.
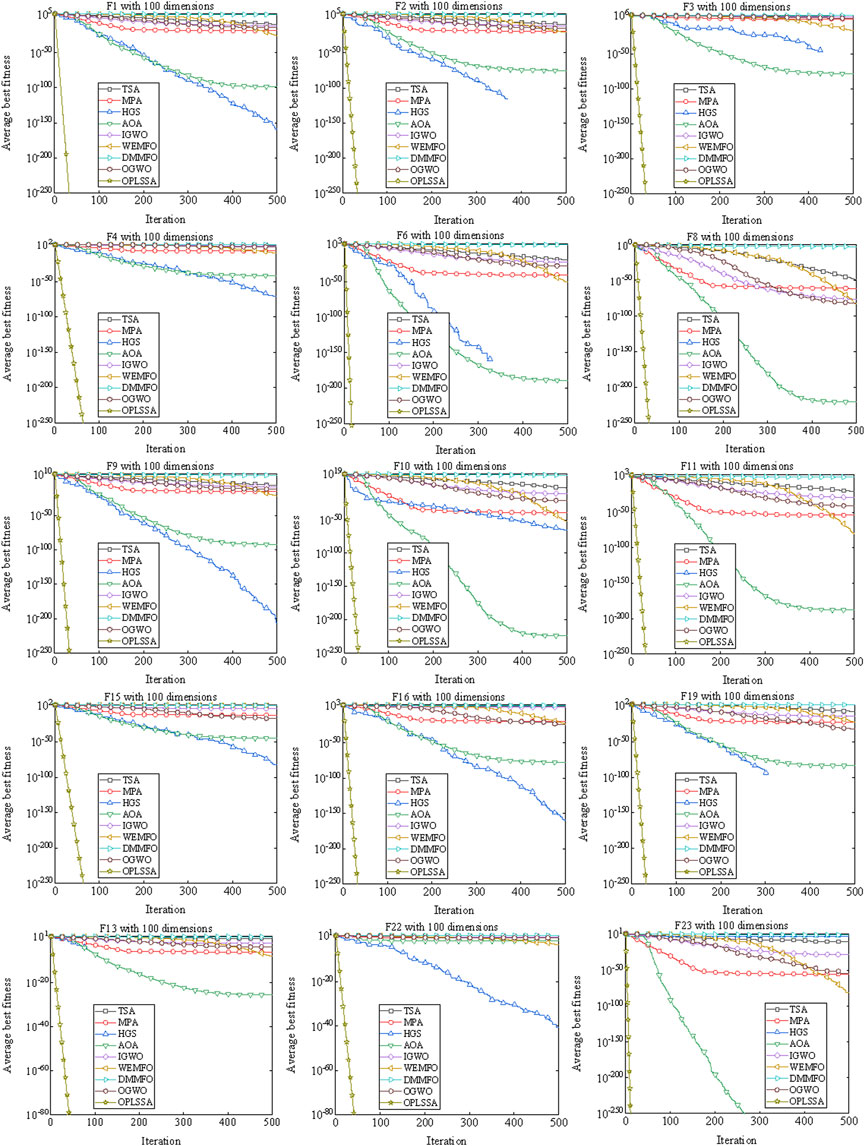
FIGURE 8. Convergence curves of OPLSSA and other Frontier algorithms on 15 representative benchmarks.
4.2 Experiments on CEC 2017 benchmark functions
In this subsection, the effectiveness of OPLSSA algorithm is tested on the IEEE CEC 2017 benchmark functions. This benchmark suite contains 30 test problems. For each function, the search region in each dimension is defined as [-100, 100]. All selected functions are initiated in [-100, 100]D, where D is the problem’s dimension which is taken as 30 for all functions. All the 30 benchmarks can be classified into four species according to the function character, in which unimodal functions contain F1, F2, and F3, from F4 to F10 belongs to multimodal functions, hybrid functions include from F11 to F20, from F21 to F30 belongs to composition functions. The details of all the 30 benchmark functions are shown in Table 8. Since the mentioned functions are from distinct classes and each has its own characteristic properties, the utilized OPLSSA is challenged from different aspects. The obtained results are compared with other well-established swarm intelligent approaches, including DA (Mirjalili, 2016), TSA (Kaur et al., 2020), EGWO (Long et al., 2018), GOA (Abualigah and Diabat, 2020), SOA (Wang et al., 2022b), PBO (Polap and Woźniak, 2017), and the standard SSA (Mirjalili et al., 2017). The specific parameters of the comparison approaches are set the same as recommended in the respective original literature, and the number of function evaluations is set to 104×D, where D is the dimension of the tested problem. The results obtained at CEC 2017 test functions for the involved approaches are reported in Table 9. Note that F2 has been removed due to the erratic behavior it exhibits.
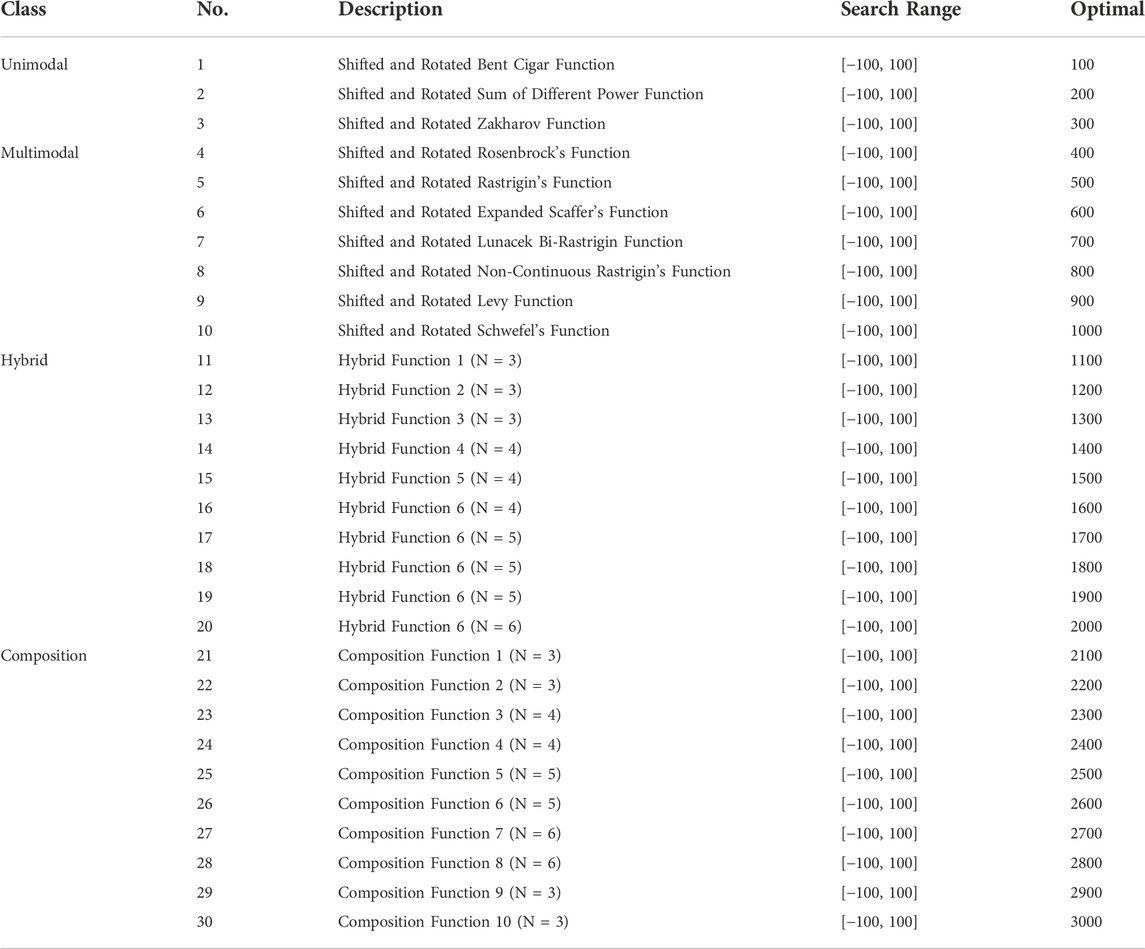
TABLE 8. Summary of the 30 CEC 2017 benchmark problems.
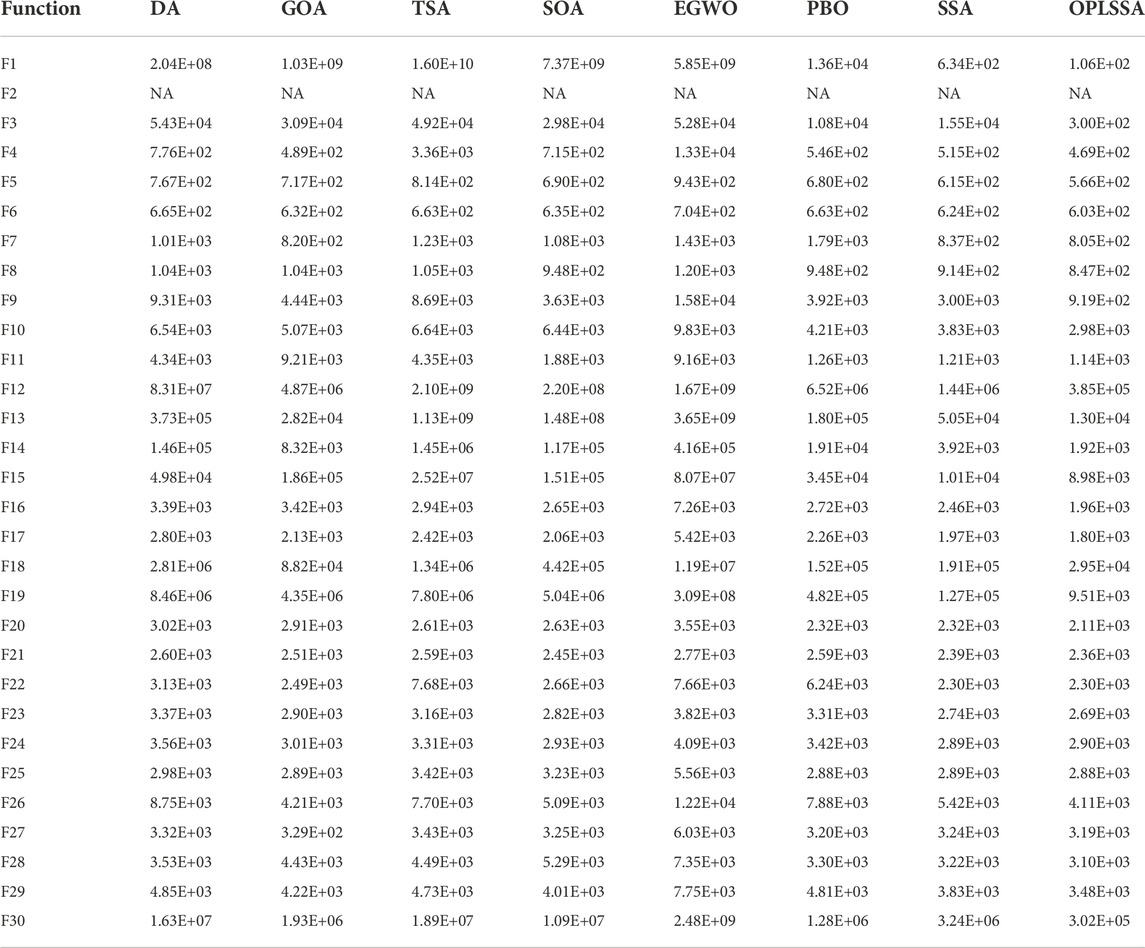
TABLE 9. Results of CEC 2017 at 30-dimensional achieved by the developed algorithm and its competitors.
By observing Table 9, OPLSSA outperformed DA, GOA, TSA, SOA, EGWO and PBO on all test cases. OPLSSA can beat PBO on almost all test functions, while on F22 and F24, the two algorithms obtain similar performance. With respect to SSA, OPLSSA provides better results on 27 test functions and similar values on one case. However, for F24, marginally better results are achieved by SSA. Overall, OPLSSA shows better or at least competitive performance than its peers on all CEC 2017 test functions, which proves that OPLSSA has superior performance. Moreover, according to the pairwise comparisons between SSA and DA, GOA, TSA, SOA, EGWO and PBO, SSA beats all competitors on 20 test functions (i.e. F1, F5, F6, F8, F9, F10, F11, F12, F14, F15, F16, F17, F19, F20, F21, F22, F23, F24, F28, F29), which proves that the SSA algorithms is a competitive swarm intelligence-based approach.
5 Conclusion
This paper proposes an extended version of salp swarm algorithm termed as OPLSSA. Two modifications to SSA have been introduced which make it competitive with other well-established swarm intelligent algorithms: First, the algorithm applied the PIBL mechanism to help the leading salp to jump out of the local optimal. Second, the algorithm uses the concept of adaptive-based mechanism to generate diversity among the followers. Both these modifications helping in boosting the balance between exploration and exploitation. The performance of the proposed algorithm has been tested on 23 classical benchmark functions and 30 IEEE CEC 2017 benchmark suite and compared with several metaheuristic techniques, including SSA-based algorithms and state-of-the-art swarm intelligent algorithms. The experimental results show that OPLSSA performs better or at least comparable to the competitor methods. Therefore, the developed OPLSSA algorithm can be regarded as a promising method for global optimization problems.
In the future works, we have planned to further extend the research on this paper on the following points: for one direction, the two proposed mechanisms will be combined with other swarm intelligence based algorithms with the hope of improving their performance; for another, the proposed OPLSSA algorithm will be employed to resolve real-world problems such as feature selection, PV parameter extraction, mobile robot path planning, multi-threshold image segmentation, and video coding optimization.
Data availability statement
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
Author contributions
ZW and HD conceived and designed the review. ZW wrote the manuscript. PH, GD, JW, ZY, and AL all participated in the data search and analysis. ZW and JY participated in the revision of the manuscript. All authors contributed to the article and approved the submitted version.
Funding
This work was supported by the National Nature Science Foundation of China (grant no. 61461053, 61461054, and 61072079), Yunnan Provincial Education Department Scientific Research Fund Project (grant no. 2022Y008), the Yunnan University’s Research Innovation Fund for Graduate Students, China (grant no. KC-22222706) and the project of fund YNWR-QNBJ-2018-310, Yunnan Province.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abualigah, L., and Diabat, A. (2020). A comprehensive survey of the grasshopper optimization algorithm: Results, variants, and applications. Neural comput. Appl. 32 (19), 15533–15556. doi:10.1007/s00521-020-04789-8
Abualigah, L., Diabat, A., and Elaziz, M. A. (2021). Review and analysis for the red deer algorithm. J. Ambient. Intell. Humaniz. Comput., 1–11. doi:10.1007/s12652-021-03602-1
Arora, S., and Singh, S. (2019). Butterfly optimization algorithm: A novel approach for global optimization. Soft Comput. 23 (3), 715–734. doi:10.1007/s00500-018-3102-4
Bairathi, D., and Gopalani, D. (2021). An improved salp swarm algorithm for complex multi-modal problems. Soft Comput. 25 (15), 10441–10465. doi:10.1007/s00500-021-05757-7
Blum, C. (2005). Ant colony optimization: Introduction and recent trends. Phys. Life Rev. 2, 353–373. doi:10.1016/j.plrev.2005.10.001
Braik, M., Hammouri, A., Atwan, J., Al-Betar, M. A., and Awadallah, M. A. (2022). White shark optimizer: A novel bio-inspired meta-heuristic algorithm for global optimization problems. Knowledge-Based Syst. 243, 108457. doi:10.1016/j.knosys.2022.108457
Braik, M., Sheta, A., Turabieh, H., and Alhiary, H. (2020). A novel lifetime scheme for enhancing the convergence performance of salp swarm algorithm. Soft Comput. 25 (1), 181–206. doi:10.1007/s00500-020-05130-0
Cao, Y., Li, X., and Wang, J. (2013). Opposition-based animal migration optimization. Math. Problems Eng. 2013, 1–7. doi:10.1155/2013/308250
Çelik, E., Öztürk, N., and Arya, Y. (2021). Advancement of the search process of salp swarm algorithm for global optimization problems. Expert Syst. Appl. 182, 115292. doi:10.1016/j.eswa.2021.115292
Chen, D., Liu, J., Yao, C., Zhang, Z., and Du, X. (2022). Multi-strategy improved salp swarm algorithm and its application in reliability optimization. Math. Biosci. Eng. 19 (5), 5269–5292. doi:10.3934/mbe.2022247
Chen, H., Li, W., and Yang, X. (2020). A whale optimization algorithm with chaos mechanism based on quasi-opposition for global optimization problems. Expert Syst. Appl. 158, 113612. doi:10.1016/j.eswa.2020.113612
Dash, S. P., Subhashini, K. R., and Chinta, P. (2022). Development of a Boundary Assigned Animal Migration Optimization algorithm and its application to optimal power flow study. Expert Syst. Appl. 200, 116776. doi:10.1016/j.eswa.2022.116776
Dhiman, G., Garg, M., Nagar, A., Kumar, V., and Dehghani, M. (2021). A novel algorithm for global optimization: Rat swarm optimizer. J. Ambient. Intell. Humaniz. Comput. 12 (8), 8457–8482. doi:10.1007/s12652-020-02580-0
Dhiman, G., and Kumar, V. (2018). Emperor penguin optimizer: A bio-inspired algorithm for engineering problems. Knowledge-Based Syst. 159, 20–50. doi:10.1016/j.knosys.2018.06.001
Dhiman, G., and Kumar, V. (2019). Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowledge-Based Syst. 165, 169–196. doi:10.1016/j.knosys.2018.11.024
Ding, H., Cao, X., Wang, Z., Dhiman, G., Hou, P., Wang, J., et al. (2022). Velocity clamping-assisted adaptive salp swarm algorithm: Balance analysis and case studies. Math. Biosci. Eng. 19 (8), 7756–7804. doi:10.3934/mbe.2022364
Dinkar, S. K., Deep, K., Mirjalili, S., and Thapliyal, S. (2021). Opposition-based Laplacian equilibrium optimizer with application in image segmentation using multilevel thresholding. Expert Syst. Appl. 174, 114766. doi:10.1016/j.eswa.2021.114766
Ewees, A. A., Al-qaness, M. A., and Abd Elaziz, M. (2021). Enhanced salp swarm algorithm based on firefly algorithm for unrelated parallel machine scheduling with setup times. Appl. Math. Model. 94, 285–305. doi:10.1016/j.apm.2021.01.017
Faramarzi, A., Heidarinejad, M., Mirjalili, S., and Gandomi, A. H. (2020). Marine predators algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 152, 113377. doi:10.1016/j.eswa.2020.113377
Faramarzi, A., Heidarinejad, M., Stephens, B., and Mirjalili, S. (2020). Equilibrium optimizer: A novel optimization algorithm. Knowledge-Based Syst. 191, 105190. doi:10.1016/j.knosys.2019.105190
Faris, H., Mafarja, M. M., Heidari, A. A., Aljarah, I., Ala’M, A. Z., Mirjalili, S., et al. (2018). An efficient binary salp swarm algorithm with crossover scheme for feature selection problems. Knowledge-Based Syst. 154, 43–67. doi:10.1016/j.knosys.2018.05.009
Fister, I., Fister, I., Yang, X. S., and Brest, J. (2013). A comprehensive review of firefly algorithms. Swarm Evol. Comput. 13, 34–46. doi:10.1016/j.swevo.2013.06.001
Gandomi, A. H., Alavi, A. H., and herd, K. (2012). Krill herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 17, 4831–4845. doi:10.1016/j.cnsns.2012.05.010
Gandomi, A. H., Yang, X. S., and Alavi, A. H. (2013). Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Eng. Comput. 29, 17–35. doi:10.1007/s00366-011-0241-y
Gu, Y., Lu, H., Xiang, L., and Shen, W. (2022). Adaptive simplified chicken swarm optimization based on inverted S-shaped inertia weight. Chin. J. Electron. 31 (2), 367–386. doi:10.1049/cje.2020.00.233
Gülcü, Ş. (2021). An improved animal migration optimization algorithm to train the feed-forward artificial neural networks. Arab. J. Sci. Eng. 47, 9557–9581. doi:10.1007/s13369-021-06286-z
Hashim, F. A., Hussain, K., Houssein, E. H., Mabrouk, M. S., and Al-Atabany, W. (2021). Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 51 (3), 1531–1551. doi:10.1007/s10489-020-01893-z
Heidari, A. A., Mirjalili, S., Faris, H., Aljarah, I., Mafarja, M., and Chen, H. (2019). Harris hawks optimization: Algorithm and applications. Future gener. Comput. Syst. 97, 849–872. doi:10.1016/j.future.2019.02.028
Hou, L., Gao, J., and Chen, R. (2016). An information entropy-based animal migration optimization algorithm for data clustering. Entropy 18 (5), 185. doi:10.3390/e18050185
Hussien, A. G. (2021). An enhanced opposition-based salp swarm algorithm for global optimization and engineering problems. J. Ambient. Intell. Humaniz. Comput. 2, 1–22.
Jain, M., Singh, V., and Rani, A. (2019). A novel nature-inspired algorithm for optimization: Squirrel search algorithm. Swarm Evol. Comput. 44, 148–175. doi:10.1016/j.swevo.2018.02.013
Jena, J. J., and Satapathy, S. C. (2021). A new adaptive tuned Social Group Optimization (SGO) algorithm with sigmoid-adaptive inertia weight for solving engineering design problems. Multimed. Tools Appl., 1–35. doi:10.1007/s11042-021-11266-4
Karaboga, D., and Basturk, B. (2007). A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 39, 459–471. doi:10.1007/s10898-007-9149-x
Kaur, S., Awasthi, L. K., Sangal, A. L., and Dhiman, G. (2020). Tunicate swarm algorithm: A new bio-inspired based metaheuristic paradigm for global optimization. Eng. Appl. Artif. Intell. 90, 103541. doi:10.1016/j.engappai.2020.103541
Kennedy, J., and Eberhart, R. (1995). Particle swarm optimization. Proc. ICNN’95-international Conf. neural Netw. 4, 1942–1948.
Khishe, M., and Mosavi, M. R. (2020). Chimp optimization algorithm. Expert Syst. Appl. 149, 113338. doi:10.1016/j.eswa.2020.113338
Li, S., Chen, H., Wang, M., Heidari, A. A., and Mirjalili, S. (2020). Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 111, 300–323. doi:10.1016/j.future.2020.03.055
Li, X., Ma, S., and Hu, J. (2017). Multi-search differential evolution algorithm. Appl. Intell. (Dordr). 47 (1), 231–256. doi:10.1007/s10489-016-0885-9
Li, X., and Yin, M. (2015). Modified cuckoo search algorithm with self adaptive parameter method. Inf. Sci. 298, 80–97. doi:10.1016/j.ins.2014.11.042
Li, X., Zhang, J., and Yin, M. (2014). Animal migration optimization: An optimization algorithm inspired by animal migration behavior. Neural comput. Appl. 24 (7), 1867–1877. doi:10.1007/s00521-013-1433-8
Long, W., Jiao, J., Liang, X., and Tang, M. (2018). An exploration-enhanced grey wolf optimizer to solve high-dimensional numerical optimization. Eng. Appl. Artif. Intell. 68, 63–80. doi:10.1016/j.engappai.2017.10.024
Long, W., Jiao, J., Liang, X., Wu, T., Xu, M., and Cai, S. (2021). Pinhole-imaging-based learning butterfly optimization algorithm for global optimization and feature selection. Appl. Soft Comput. 103, 107146. doi:10.1016/j.asoc.2021.107146
Ma, L., Wang, C., Xie, N. g., Shi, M., Ye, Y., and Wang, L. (2021). Moth-flame optimization algorithm based on diversity and mutation strategy. Appl. Intell. 17, 5836–5872. doi:10.1007/s10489-020-02081-9
Meng, X. B., Liu, Y., Gao, X. Z., and Zhang, H. Z. (2021). “A new bio-inspired algorithm: Chicken swarm optimization,” in Proc. Of international conference on swarm intelligence (China: Hefei).
MiarNaeimi, F., Azizyan, G., and Rashki, M. (2021). Horse herd optimization algorithm: A nature-inspired algorithm for high-dimensional optimization problems. Knowledge-Based Syst. 213, 106711. doi:10.1016/j.knosys.2020.106711
Mirjalili, S. (2016). Dragonfly algorithm: A new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems. Neural comput. Appl. 27 (4), 1053–1073. doi:10.1007/s00521-015-1920-1
Mirjalili, S., Gandomi, A. H., Mirjalili, S. Z., Saremi, S., Faris, H., and Mirjalili, S. M. (2017). Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 114, 163–191. doi:10.1016/j.advengsoft.2017.07.002
Mirjalili, S., and Lewis, A. (2016). The whale optimization algorithm. Adv. Eng. Softw. 95, 51–67. doi:10.1016/j.advengsoft.2016.01.008
Mirjalili, S., Mirjalili, S. M., and Lewis, A. (2014). Grey wolf optimizer. Adv. Eng. Softw. 69, 46–61. doi:10.1016/j.advengsoft.2013.12.007
Mirjalili, S. (2015). Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowledge-based Syst. 89, 228–249. doi:10.1016/j.knosys.2015.07.006
Mitić, M., Vukovic, N., Petrovic, M., and Miljkovic, Z. (2015). Chaotic fruit fly optimization algorithm. Knowledge-Based Syst. 89, 446–458. doi:10.1016/j.knosys.2015.08.010
Nadimi-Shahraki, M. H., Taghian, S., and Mirjalili, S. (2021). An improved grey wolf optimizer for solving engineering problems. Expert Syst. Appl. 166, 113917. doi:10.1016/j.eswa.2020.113917
Naik, A., Satapathy, S. C., Ashour, A. S., and Dey, N. (2018). Social group optimization for global optimization of multimodal functions and data clustering problems. Neural comput. Appl. 30 (1), 271–287. doi:10.1007/s00521-016-2686-9
Nautiyal, B., Prakash, R., Vimal, V., Liang, G., and Chen, H. (2021). Improved salp swarm algorithm with mutation schemes for solving global optimization and engineering problems. Eng. Comput. 7, 1–23.
Ozbay, F. A., and Alatas, B. (2021). Adaptive Salp swarm optimization algorithms with inertia weights for novel fake news detection model in online social media. Multimed. Tools Appl. 80 (26), 34333–34357. doi:10.1007/s11042-021-11006-8
Polap, D., and Woźniak, M. (2017). Polar bear optimization algorithm: Meta-heuristic with fast population movement and dynamic birth and death mechanism. Symmetry 9, 203. doi:10.3390/sym9100203
Rahkar Farshi, T. (2019). A multilevel image thresholding using the animal migration optimization algorithm. Iran. J. Comput. Sci. 2 (1), 9–22. doi:10.1007/s42044-018-0022-5
Ren, H., Li, J., Chen, H., and Li, C. (2021). Stability of salp swarm algorithm with random replacement and double adaptive weighting. Appl. Math. Model. 95, 503–523. doi:10.1016/j.apm.2021.02.002
Saafan, M. M., and El-Gendy, E. M. (2021). Iwossa: An improved whale optimization salp swarm algorithm for solving optimization problems. Expert Syst. Appl. 15 (176), 114901. doi:10.1016/j.eswa.2021.114901
Salgotra, R., Singh, U., Singh, S., Singh, G., and Mittal, N. (2021). Self-adaptive salp swarm algorithm for engineering optimization problems. Appl. Math. Model. 89, 188–207. doi:10.1016/j.apm.2020.08.014
Shan, W., Qiao, Z., Heidari, A. A., Chen, H., Turabieh, H., and Teng, Y. (2021). Double adaptive weights for stabilization of moth flame optimizer: Balance analysis, engineering cases, and medical diagnosis. Knowl. Based. Syst. 214, 106728. doi:10.1016/j.knosys.2020.106728
Singh, N., Houssein, E. H., Singh, S. B., and Dhiman, G. (2022). Hssahho: A novel hybrid salp swarm-harris hawks optimization algorithm for complex engineering problems. J. Ambient. Intell. Humaniz. Comput., 1–37. doi:10.1007/s12652-022-03724-0
Storn, R., and Price, K. (1997). Differential evolution–a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 11 (4), 341–359. doi:10.1023/a:1008202821328
Tu, Q., Liu, Y., Han, F., Liu, X., and Xie, Y. (2021). Range-free localization using reliable anchor pair selection and quantum-behaved salp swarm algorithm for anisotropic wireless sensor networks. Ad Hoc Netw. 113, 102406. doi:10.1016/j.adhoc.2020.102406
Wang, G. G., Deb, S., and Cui, Z. (2019). Monarch butterfly optimization. Neural comput. Appl. 31 (7), 1995–2014. doi:10.1007/s00521-015-1923-y
Wang, X., Wang, Y., Wong, K. C., and Li, X. (2022). A self-adaptive weighted differential evolution approach for large-scale feature selection. Knowledge-Based Syst. 235, 107633. doi:10.1016/j.knosys.2021.107633
Wang, Z., Ding, H., Li, B., Bao, L., and Yang, Z. (2020). An energy efficient routing protocol based on improved artificial bee colony algorithm for wireless sensor networks. IEEE Access 8, 133577–133596. doi:10.1109/access.2020.3010313
Wang, Z., Ding, H., Li, B., Bao, L., Yang, Z., and Liu, Q. (2022). Energy efficient cluster based routing protocol for WSN using firefly algorithm and ant colony optimization. Wirel. Pers. Commun. 125, 2167–2200. doi:10.1007/s11277-022-09651-9
Wang, Z., Ding, H., Wang, J., Hou, P., Li, A., Yang, Z., et al. (2022). Adaptive guided salp swarm algorithm with velocity clamping mechanism for solving optimization problems. J. Comput. Des. Eng. 9, 2196–2234. doi:10.1093/jcde/qwac094
Wang, Z., Ding, H., Yang, J., Wang, J., Li, B., Yang, Z., et al. (2022). Advanced orthogonal opposition-based learning-driven dynamic salp swarm algorithm: Framework and case studies. IET Control Theory Appl. 16, 945–971. doi:10.1049/cth2.12277
Wang, Z., Ding, H., Yang, Z., Li, B., Guan, Z., and Bao, L. (2021). Rank-driven salp swarm algorithm with orthogonal opposition-based learning for global optimization. Appl. Intell. (Dordr). 52, 7922–7964. doi:10.1007/s10489-021-02776-7
Wolpert, D. H., and Macready, W. G. (1997). No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1, 67–82. doi:10.1109/4235.585893
Xia, J., Zhang, H., Li, R., Wang, Z., Cai, Z., Gu, Z., et al. (2022). Adaptive barebones salp swarm algorithm with quasi-oppositional learning for medical diagnosis systems: A comprehensive analysis. J. Bionic Eng. 19, 240–256. doi:10.1007/s42235-021-00114-8
Yang, X. S., and Gandomi, A. H. (2012). Bat algorithm: A novel approach for global engineering optimization. Eng. Comput. Swans. 29, 464–483. doi:10.1108/02644401211235834
Yang, Y., Chen, H., Heidari, A. A., and Gandomi, A. H. (2021). Hunger games search: Visions, conception, implementation, deep analysis, perspectives, and towards performance shifts. Expert Syst. Appl. 177, 114864. doi:10.1016/j.eswa.2021.114864
Yildiz, B. S., Pholdee, N., Bureerat, S., Yildiz, A. R., and Sait, S. M. (2021). Enhanced grasshopper optimization algorithm using elite opposition-based learning for solving real-world engineering problems. Eng. Comput. 38, 4207–4219. doi:10.1007/s00366-021-01368-w
Yu, X., Xu, W., and Li, C. (2021). Opposition-based learning grey wolf optimizer for global optimization. Knowledge-Based Syst. 226, 107139. doi:10.1016/j.knosys.2021.107139
Zamani, H., Nadimi-Shahraki, M. H., and Gandomi, A. H. (2022). Starling murmuration optimizer: A novel bio-inspired algorithm for global and engineering optimization. Comput. Methods Appl. Mech. Eng. 392, 114616. doi:10.1016/j.cma.2022.114616
Zhang, H., Feng, Y., Huang, W., Zhang, J., and Zhang, J. (2021). A novel mutual aid Salp Swarm Algorithm for global optimization. Concurr. Comput. Pract. Exper. 2021, e6556. doi:10.1002/cpe.6556
Keywords: particle swarm optimization, exploration and exploitation, metaheuristic algorithms, equilibrium optimizer, global optimization, benchmark
Citation: Wang Z, Ding H, Yang J, Hou P, Dhiman G, Wang J, Yang Z and Li A (2022) Orthogonal pinhole-imaging-based learning salp swarm algorithm with self-adaptive structure for global optimization. Front. Bioeng. Biotechnol. 10:1018895. doi: 10.3389/fbioe.2022.1018895
Received: 14 August 2022; Accepted: 17 November 2022;
Published: 01 December 2022.
Edited by:
Suvash C. Saha, University of Technology Sydney, AustraliaReviewed by:
Xiangtao Li, School of Artificial Intelligence, Jilin University, ChinaEssam Halim Houssein, Minia University, Egypt
Copyright © 2022 Wang, Ding, Yang, Hou, Dhiman, Wang, Yang and Li. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Hongwei Ding, d3pzX3ludUAxNjMuY29tJiN4MDIwMGE7