 Basel Alhaji
Basel Alhaji Michael Prilla
Michael Prilla Andreas Rausch3
Andreas Rausch3
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
CORRECTION article
Front. Artif. Intell., 01 October 2021
Sec. AI for Human Learning and Behavior Change
Volume 4 - 2021 | https://doi.org/10.3389/frai.2021.761184
This article is part of the Research TopicRespecting Human Autonomy through Human-Centered AIView all 9 articles
A corrigendum on
Trust Dynamics and Verbal Assurances in Human Robot Physical Collaboration
by Alhaji, B., Prilla, M., and Rausch, A. (2021). Front. Artif. Intell. 4:703504. doi: 10.3389/frai.2021.703504
In the original article, there was a mistake in the figures and captions as published. The images were in the incorrect order and did not match the figure captions. The corrected Figures 1–7 appear below. Also the word “between” was duplicated in the caption of Figure 6, so we removed the duplicate.
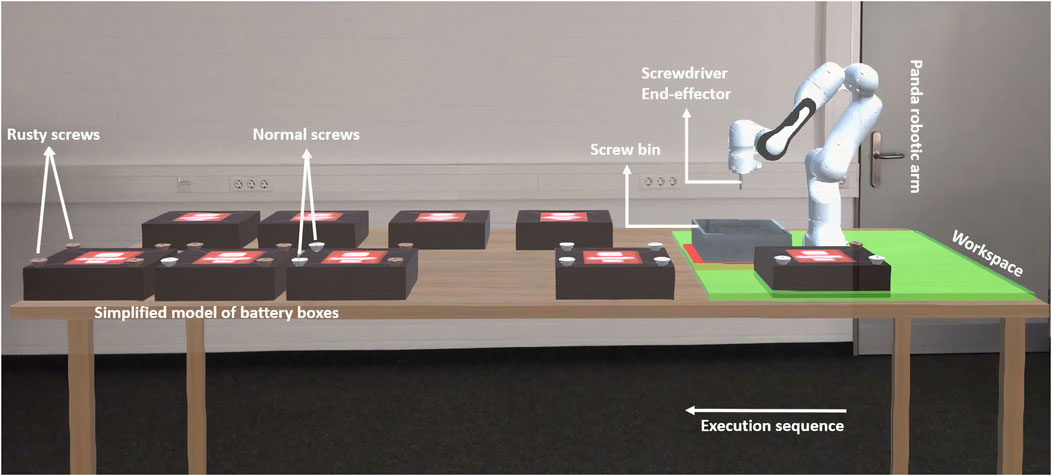
FIGURE 1. Experiment setup (from participant’s point of view). The green area shows the accessible workspace of the robot. There are two rows of batteries: on the front side, the batteries with screws are located; on the back side, some extra already disassembled batteries are located to create a more realistic scene.
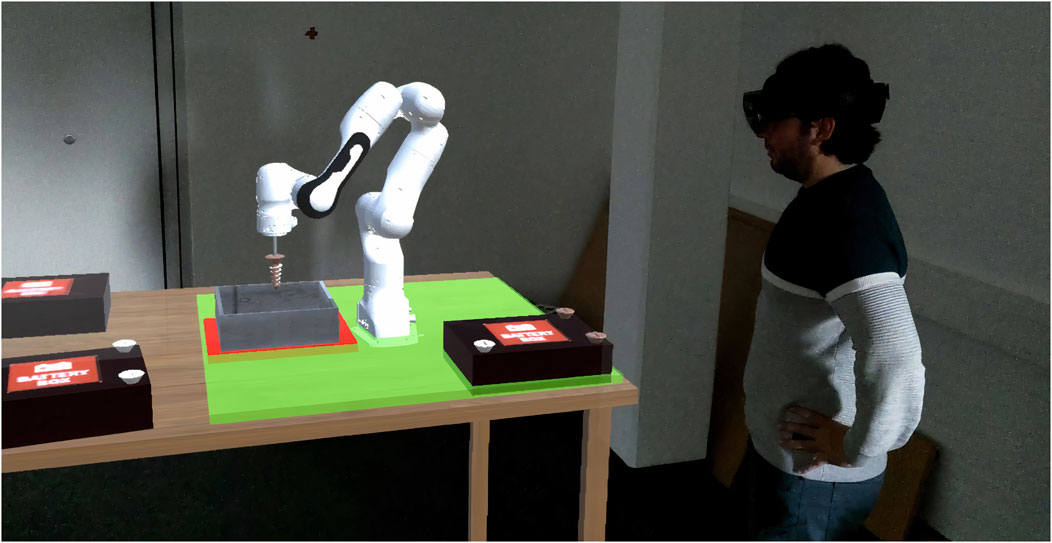
FIGURE 2. Third party point of view. A participant wears the HoloLens and commands the robot to loosen screws. It is allowed to locate the battery anywhere inside the green workspace except over the screw bin which is marked in red.
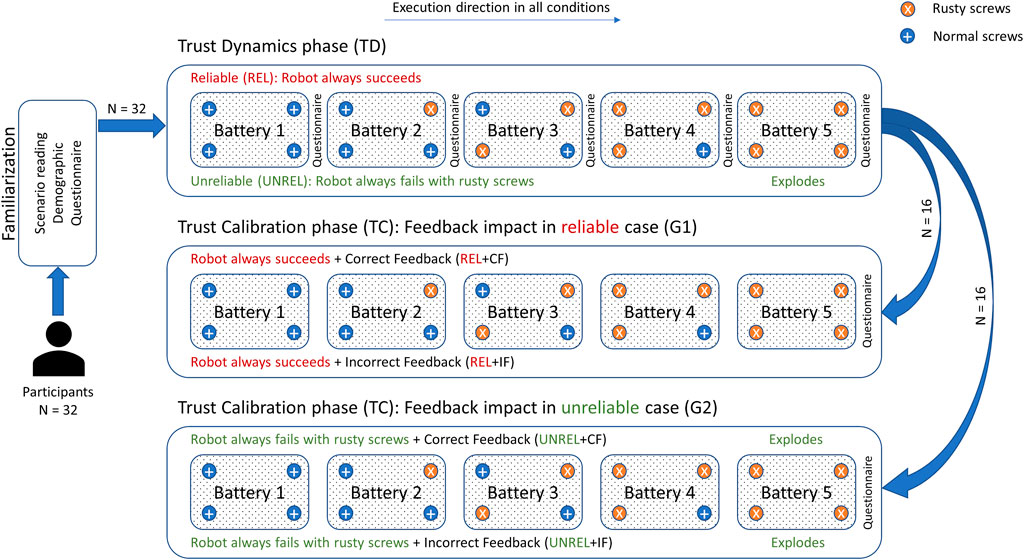
FIGURE 3. Experimental procedure. Participants start with TD phase and fill a questionnaire after each battery. They proceed with TC phase depending on the group, where only one questionnaire is administered. Batteries should be handled in their order. In TD phase, trust dynamics is studied. In the TC phase, the effect of verbal feedback on human trust is studied with different reliability levels.
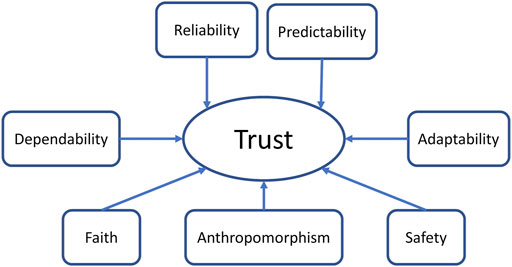
FIGURE 4. Potential trust factors included in this study.
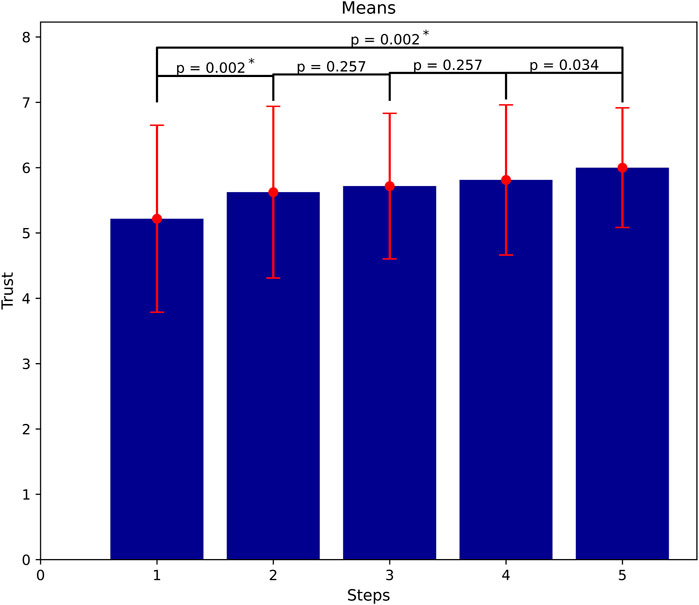
FIGURE 5. Trust accumulation as more successful interactions and task executions occur (means of trust at all steps). Significant gain of trust between the first and the last steps, but not in between them (α = 0.01).
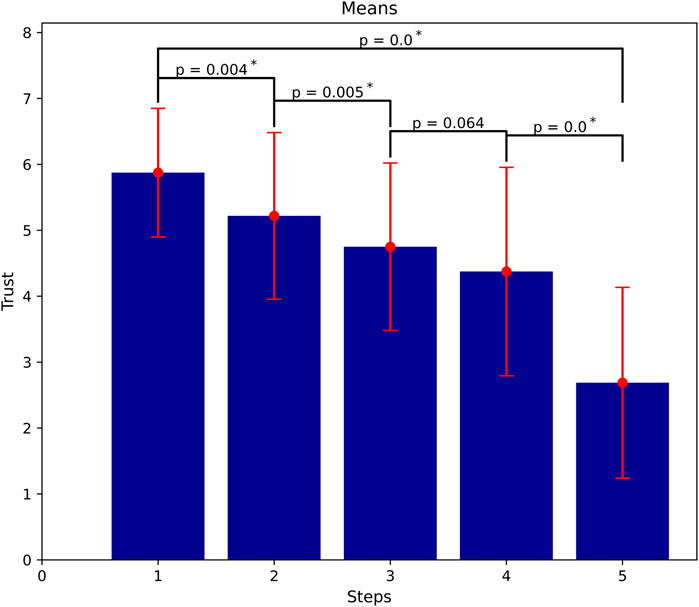
FIGURE 6. Trust dissipation as more failures occur (means of trust at all steps). Significant loss of trust mostly even in between steps (α = 0.01).
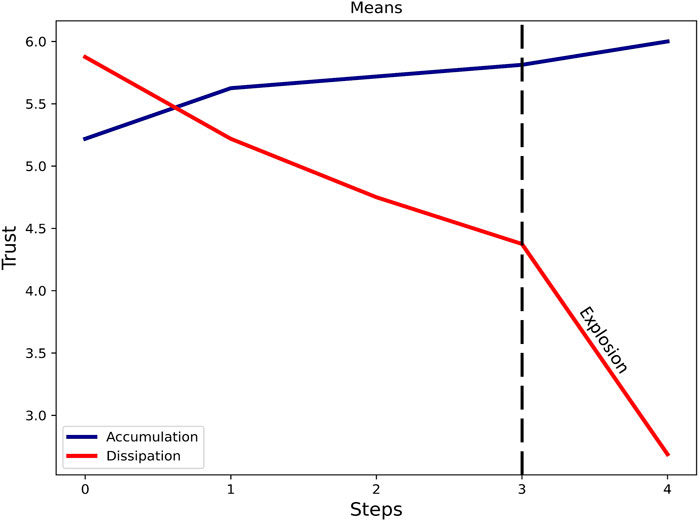
FIGURE 7. Dynamic trust development. Almost doubly stronger dynamics in dissipation compared to accumulation.
The authors apologize for this error and state that this does not change the scientific conclusions of the article in any way. The original article has been updated.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Keywords: human-robot collaboration, trust dynamics, trust factors, trust calibration, human robot teamwork, verbal feedback
Citation: Alhaji B, Prilla M and Rausch A (2021) Corrigendum: Trust Dynamics and Verbal Assurances in Human Robot Physical Collaboration. Front. Artif. Intell. 4:761184. doi: 10.3389/frai.2021.761184
Received: 19 August 2021; Accepted: 15 September 2021;
Published: 01 October 2021.
Edited and reviewed by:
Kaisa Väänänen, Tampere University, FinlandCopyright © 2021 Alhaji, Prilla and Rausch. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Basel Alhaji, YmFzZWwuYWxoYWppQHR1LWNsYXVzdGhhbC5kZQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.