 Sophie Burkhardt
Sophie Burkhardt Jannis Brugger
Jannis Brugger Nicolas Wagner
Nicolas Wagner Zahra Ahmadi1
Zahra Ahmadi1 Kristian Kersting
Kristian Kersting
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Artif. Intell. , 21 July 2021
Sec. Machine Learning and Artificial Intelligence
Volume 4 - 2021 | https://doi.org/10.3389/frai.2021.642263
Classification approaches that allow to extract logical rules such as decision trees are often considered to be more interpretable than neural networks. Also, logical rules are comparatively easy to verify with any possible input. This is an important part in systems that aim to ensure correct operation of a given model. However, for high-dimensional input data such as images, the individual symbols, i.e. pixels, are not easily interpretable. Therefore, rule-based approaches are not typically used for this kind of high-dimensional data. We introduce the concept of first-order convolutional rules, which are logical rules that can be extracted using a convolutional neural network (CNN), and whose complexity depends on the size of the convolutional filter and not on the dimensionality of the input. Our approach is based on rule extraction from binary neural networks with stochastic local search. We show how to extract rules that are not necessarily short, but characteristic of the input, and easy to visualize. Our experiments show that the proposed approach is able to model the functionality of the neural network while at the same time producing interpretable logical rules. Thus, we demonstrate the potential of rule-based approaches for images which allows to combine advantages of neural networks and rule learning.
1Neural Networks (NNs) are commonly seen as black boxes, which makes their application in some areas still problematic (e.g., in safety-relevant applications or applications in which DL is only intended to support a human user). Logical statements are however easier to process by humans than the main building blocks of NNs (e.g., nonlinearities, matrix multiplications, or convolutions). In general, learning of logical rules cannot be done using gradient-based algorithms as they are not differentiable. Even if we find rules that exactly describe a neural network, they might still be too complex to be understandable. In this paper we propose convolutional rules for which the complexity is not related to the dimensionality of the input but only to the dimensionality of the convolutional filters. Thereby we aim to combine advantages from two fields: We make use of the NN’s ability to handle high-dimensional data and we allow for model validation, not just through visualization and subjective assessment, but through rigorous logical rules.
It is a wide-spread belief that shorter rules are usually better than longer rules, a principle known as Occam’s razor. This common assumption was recently challenged again by Stecher et al. (2016), who revive the notion of so-called characteristic rules instead. As they show, shorter rules are often discriminative rules that help to differentiate different output classes, but are not necessarily descriptive of the data. In this work, we can confirm this observation and show how characteristic rules are produced for high-dimensional input data such as images.
Specifically, based on recent developments in deep learning with binary neural networks (BNNs) (Hubara et al., 2016), we propose an algorithm for decompositional rule extraction (Andrews et al., 1995), called Deep Convolutional DNF Learner (DCDL). A BNN takes binary input and only produces binary outputs in all hidden layers as well as the output layer. Some BNNs also restrict weights to be binary, however, this is not necessary for our approach. We then approximate each layer using rules and combine these rules into one rule to approximate the whole network. As our empirical results show, this allows for better approximation than with an approach that considers the neural network to be a black box—a so-called pedagogical rule extraction approach.
Moreover, we show how the convolutional rules are used to visualize what the network has learned, a feature not available for other types of logical rules that would not lead to any meaningful visualization.
As parallel developments Narodytska et al. (2020); Jia and Rinard (2020) show, the use of binary neural networks for model validation is a promising research direction, because SAT-solvers can be employed more efficiently in these networks than Satisfiability Modulo Theory (SMT) solvers that are usually applied on non-binary networks. Thus, our work can be seen as complementary to theirs, and we focus more on the visualization of the rules and the approximation of the convolutional filters here although the final goal of eventually applying SAT-solvers or related techniques in order to verify model functionality is the same.
To sum up, our contributions are as follows:
• We formally define first-order convolutional rules (Section 3.1) to describe a neural network using rules that are less complex than the original input.
• We show that the decompositional rule extraction approach performs better than the approach that considers the network as a black box in terms of approximating the functionality of the neural network.
• We show how the convolutional rules produce characteristic visualizations of what the neural network has learned (although we want to emphasize that our goal is not to explain individual classifications).
• To our knowledge, for the first time we show how logical rules can be used on high-dimensional data such as images and still yield interpretable results.
We proceed as follows. We start off by touching upon related work on binary neural networks, rule extraction, and interpretability in convolutional networks in Section 2. Deep Convolutional DNF Learner (DCDL), consisting of the specification of first-order convolutional rules and the SLS algorithm, is then introduced in Section 3. Our experimental results on similarity, accuracy, and the visualization are presented and discussed in Section 4.
Our work builds upon binary neural networks, rule extraction, and visualization of convolutional neural networks.
Binary Neural Networks (BNNs) are neural networks that restrict the target of activation functions and weights to binary values
However, by construction, the activation functions of BNNs lack differentiability and have less representational power due to their limitation to binary output values. Research on BNNs focuses on alleviating these two limitations. A breakthrough for BNNs was the straight-through estimator (STE) introduced in Hinton’s lectures (Hinton, 2012). The STE calculates the gradient of the Heaviside step function H as if it was the identity function. By using the STE in combination with the sign function
Rule extraction algorithms are commonly divided into decompositional and pedagogical approaches (Andrews et al., 1995). Pedagogical (or model-agnostic) approaches view the neural network as a black box and approximate its global function using rules, whereas decompositional methods make use of the individual components of the network in order to construct the set of rules. Our work follows a decompositional approach, allowing a better approximation as compared to the pedagogical approach that we compare to in our experiments.
State-of-the-art pedagogical approaches include validity interval analysis (VIA), sampling, and reverse engineering. VIA (Thrun, 1993, Thrun, 1995) searches for intervals in the input data within which the NN produces the same output. The found intervals can be transformed into rules. Approaches using sampling (Craven and Shavlik, 1995; Schmitz et al., 1999; Taha and Ghosh, 1999; Sethi et al., 2012) try to let the NN label especially important instances in order to learn better rules. For instance, sampling can be beneficial to learn rules on parts of the unknown label function which are not covered well by the training instances. The reverse engineering approach by Augasta and Kathirvalavakumar (2011) prunes the NN before the rules are extracted. As a result, the extracted rules are more comprehensible. Setiono and Leow (2000) use a similar technique to identify the relevant perceptrons of a NN.
Among others, decompositional algorithms use search techniques to find input combinations that activate a perceptron (Fu, 1994; Tsukimoto, 2000). Some search techniques provably run in polynomial time (Tsukimoto, 2000). More recently, Zilke et al. (2016) proposed an algorithm that extracts decision trees per layer which can be merged into one rule set for the complete NN. González et al. (2017) improve on this algorithm by polarizing real-valued activations and pruning weights through retraining. Both rely on the C4.5 (Quinlan, 2014) decision tree algorithm for rule extraction. Kane and Milgram (1993) use a similar idea but cannot retrain an arbitrary already existing NN. Right from the beginning, they train NNs having (almost) binary activations or perceptrons, which are only capable of representing logical AND, OR, or NOT operations. Rules are extracted by constructing truth tables per perceptron.
Unfortunately, the existing decompositional rule extraction algorithms have no principled theoretical foundations in computational complexity and computational learning theory. The runtime of the search algorithm developed by Tsukimoto (Tsukimoto, 2000) is a polynomial of the number of input variables. However, this holds only if the number of literals that constitute a term of an extracted logical rule is fixed.
The other presented search algorithms exhibit an exponential runtime. Additionally, all mentioned search algorithms lack the possibility to fix the number of terms per extracted logical rule. Although the more recent decision tree-based approaches (Zilke et al., 2016) apply techniques to reduce the complexity of the extracted rules, they cannot predetermine the maximum model complexity. The only strict limitation is given by the maximum tree depth, which corresponds to the maximum number of literals per term of a logical rule. In general, the C4.5 algorithm does not take complexity restrictions into account while training. Directly being able to limit complexity, in particular the number of terms of a disjunctive normal form (DNF) in rule extraction, is desirable to fine-tune the level of granularity of a requested approximation.
In addition to pedagogical and decompositional approaches, there are approaches for local explanations, which explain a particular output, and visualization Ribeiro et al. (2016). Also, there are approaches that create new models that are assumed to be more interpretable than the neural network (Odense and Garcez, 2020). As this is not our goal, we focus on the decompositional approach in our work.
Concerning the interpretability of convolutional neural networks, existing work can be divided into methods that merely visualize or analyze the trained convolutional filters (Simonyan et al., 2013; Zeiler and Fergus, 2014; Mahendran and Vedaldi, 2015; Zhou et al., 2016) and methods that influence the filters during training in order to force the CNN to learn more interpretable representations (Hu et al., 2016; Ross et al., 2017; Stone et al., 2017). Our work can be situated in between those two approaches. While we do change the training procedure by forcing the CNN to use binary inputs and generating binary outputs, we also visualize and analyze the filters after training by approximating the network with logical rules.
In order to make convolutional neural networks more interpretable, Zhang et al. (2018) propose a method to learn more semantically meaningful filters. This method prevents filters from matching several different object parts (such as the head and the leg of a cat) and instead leads to each filter only detecting one specific object part (e.g., only the head), thus making the filters more interpretable. In contrast, our approach allows for different object parts being represented in one filter, but then uses the approximation with rules to differentiate between different object parts. One term in a k-term DNF (see Section 3.1 for the definition of k-term DNFs) might correspond to one specific object part.
While these approaches are looking at the interpretability of CNNs, in essence they all resort to local explanations and visualizations of network outputs. Rule learning provides a global approach that is much more precise and exactly explains how a certain output was generated. Apart from one recent attempt for propositional rules (Bologna, 2019) we are not aware of any other work that learns logical rules from CNNs. In this work, we argue that predicate logic is more suitable for logical rule extraction from CNNs.
Our approach draws inspiration from recent work on binary neural networks, which are able to perform almost on par with non-binary networks in many cases (Lin et al., 2017; Liu et al., 2018). These networks are built of components that can provably be transformed into logical rules. However, for this work we only used the Clipped STE as it appeared sufficient for smaller datasets and networks that were used in our experiments. For the CIFAR dataset there could be an advantage to adding scaling. Further improvements of the binary network architecture are therefore possible, also batch normalization might improve performance in some cases, but this was not our main focus.
The basic building blocks of any NN are variants of perceptrons. To ensure that a perceptron can be represented by a logical expression, we need to restrict the input as well as the output to binary values. This allows to transform perceptrons into truth tables. For hidden layers, we have to ensure that the output is binary leading to binary input for subsequent layers. For the input layer, we need to establish a binarization mechanism for categorical and a discretization mechanism for continuous features. The binarization of a categorical feature with n possible values is done in a canonical way by expanding it into n binary features. For the discretization of continuous features we use dithering. In particular, we use the Floyd-Steinberg algorithm2 to dither the gray scale images to black and white images and dither the individual channels of RGB images. We tested Floyd-Steinberg, Atkinson, Jarvis-Judice-Ninke, Stucki, Burkes, Sierra-2-4a, and Stevenson-Arce dithering,3 which are based on error diffusion, and found no statistically significant differences in the performance of the neural network using a corrected resampled t-test (Nadeau and Bengio, 2003).
A standard perceptron using the heaviside-function satisfies the requirement of binary outputs, but is not differentiable (unless using the delta-distribution). However, the straight-through estimator (Bengio et al., 2013) calculates gradients by replacing the heaviside-function with the identity function and thus allows to backpropagate the gradients.
To be able to regularize complexity, we employ an adaptation of the stochastic local search (SLS) algorithm (Rückert and Kramer, 2003) to extract logical expressions with k terms in disjunctive normal form (k-term DNF). SLS can be parameterized with the number of terms to learn and thereby limit the maximum complexity. As the SLS algorithm is run after an NN has been trained, we do not limit the complexity at training time. Hinton et al. (2015) have already shown that this can be advantageous.
Convolutional Neural Networks (CNNs) are important architectures for deep neural networks (Mnih et al., 2013; Gehring et al., 2017; Poplin et al., 2018). Although convolutional layers can be seen as perceptrons with shared weights, logical expressions representing such layers need to be invariant to translation, too. However, logical expressions are in general fixed to particular features. To overcome this issue, we introduce a new class of logical expressions, which we call convolutional logical rules. Those rules are described in relative positions and are not based on the absolute position of a feature. For inference, convolutional logical rules are moved through data in the same manner as convolutional filters. This ensures interpretability and lowers the dimensionality of extracted rules.
Pooling layers are often used in conjunction with convolutional layers, and max-pooling layers guarantee binary outputs given binary inputs. Fortunately, binary max-pooling can easily be represented by logical expressions in which all input features are connected by a logical OR. The algorithms for training and testing DCDL are summarized in Algorithms 1, 2.
Algorithm 1
1: procedureTrain DCDL (number of layers L).
2:
3: for layer
4: if Convolutional layer then.
5:
6: for Convolutional filter fdo.
7:
8:
9:
10: else if Max pooling then.
11: No training required.
12: else if Dense then.
13:
14:
return ϕ
Algorithm 2
1: procedure Test DCDL (input data, trained rule learner models ϕ).
2: input
3: for
4: if Convolutional layer then.
5:
6: for rule
7:
8:
9: else if Max pooling then.
10: for Output neuron do.
11: Combine values in each pool with or-operation.
12: else if Dense then.
13:
14: input
return prediction of DCDL λ
This section provides the formal underpinnings and the introduction of the convolutional rules. We start with propositional k-DNF formulas and then move on to use first-order logic to take advantage of variable assignments (variables representing relative pixel positions) as we shift the filter across the image.
A k-term DNF combines Boolean variables
where
In general, a rule is described in relation to a fixed set of input variables. Unfortunately, for image data this is not sufficient. The success of CNNs in image classification arguably stems from the translation invariance of filters. Thus, we propose that logical rules for image classification need to be invariant to translation as well. In the following we assume all pixels are binary.
Using propositional logic, the definition of convolutional logical rules is relatively complex. For a first-order convolutional logical rule definition the rule itself is straightforward and the complexity is shifted to the definition of the predicates and the environment with respect to which the predicates are evaluated. Due to the variability of the environment that is inherent in first-order logic, we can naturally account for the translation invariance of the rule. In other words, the rule stays the same, only the mapping of the variables to the concrete values in the Universe is changed as we move the rule over the image. Propositional logic on the other hand does not have variables and is thus not amenable to the translational invariance.
A k-term first-order convolutional logical rule (FCLR) is defined as follows: We define our model
A first-order convolutional logical rule with one term is now defined as
where
In order to evaluate our convolutional rule, we now need to specify the environment l (the look-up table) (Huth and Ryan, 2004) with respect to which our model satisfies (or not) the convolutional rule, i.e.
Similar to the k-terms in DNF, we have k convolutional predicates, one for each of the k terms. Therefore, we can expand Eq. 2 to
This concludes the definition of first-order convolutional rules.
The logical rules found by SLS may be displayed graphically, if the input for SLS is image data. For each image position t the variables of the convolutional predicates are mapped to the appropriate pixels using environment
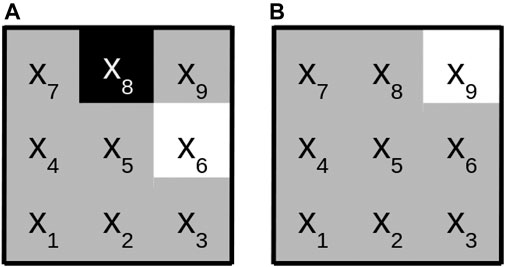
FIGURE 1. Graphical representation of the logical formula
We implemented the SLS rule learner4 and extended it for the purpose of pedagogical rule extraction (Algorithm 3). Since we apply SLS to predictive tasks, we adjust SLS to return the candidate that achieved the lowest score on the validation set (line 8). Scores used for the decision rule are still calculated on the training set. Calculation of scores is computationally expensive and SLS needs to evaluate the decision rule in every iteration. Therefore, we calculate scores batchwise. We introduce an adaptation that is theoretically motivated. One can always correct a term that falsely covers an instance by adding one literal, but the same does not hold in the case of an uncovered instance. We account for this by adjusting SLS to remove all literals in a term that differ from an instance (line 22).
Any SLS algorithm starts by evaluating a random solution candidate. It then selects the next candidate from a neighborhood of the former candidate. This procedure is repeated until a solution is found. If no solution is found and no improvement is found for 600 steps, we restart the search with a different random formula. (These restarts did not seem to have an impact in the experiments we performed but may be significant in settings with larger step sizes or other datasets.) Therefore, one has to define a candidate space, a scoring function to evaluate a candidate solution, a neighborhood of a candidate solution, as well as a decision rule for selecting the next candidate out of a neighborhood. In SLS, the candidate space consists of all applicable k-term DNFs. The scoring function is defined as the number of misclassified instances by a given k-term DNF. The neighborhood of a candidate is given by all k-term DNFs that differ in one literal to the candidate. The next candidate is selected in accordance with a randomly drawn misclassified training instance (line 12). If the instance has a positive training label, with probability
Algorithm 3
1: procedure SLSearch
2:
3:
4:
5:
6: while
7:
8:
9: if
10:
11:
12:
13: if
14: with probability
15:
16: otherwise
17:
18: number of literals from
19: with probability
20:
21: otherwise
22:
23:
24:
25: else if
26:
27: with probability
28:
29: otherwise
30:
31:
32:
33:
return
The code for the following tests can be found on github.5 The parameters

TABLE 1. Statistics of the datasets.
In this section we compare our DCDL approach with SLS against the vanilla SLS algorithm and the DCDL approach with the decision tree rules learner against the vanilla decision tree rule learner. We look at their ability to model the behavior of a multilayer neural network for the datasets MNIST, FASHION-MNIST and CIFAR10. An overview of the experimental setup is given in Figure 2.
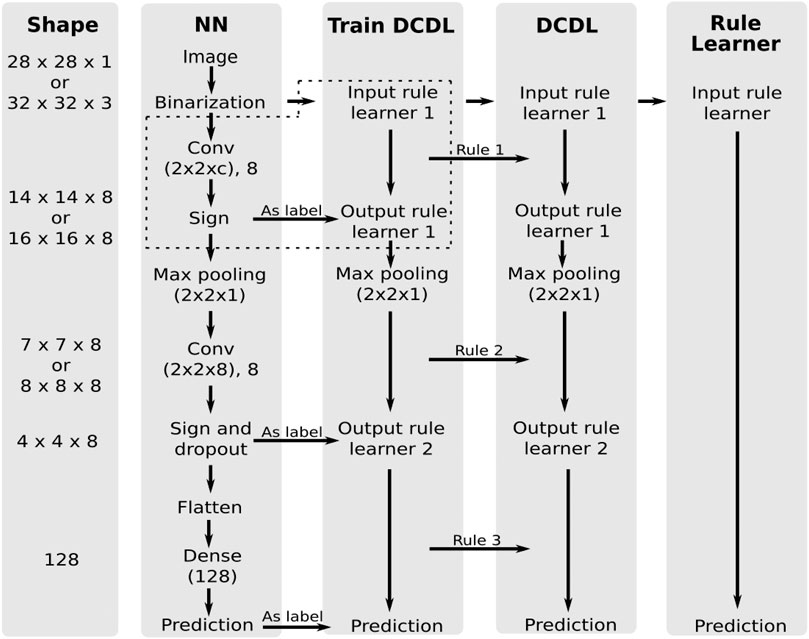
FIGURE 2. Experimental setup for comparing the neural network, the DCDL with a rule learner and the vanilla rule learner approach. c depends on the dataset and is the number of color channels. The content of the dotted box is shown in more detail in Figure 3.
First a neural network is trained, which consists of two convolutional layers followed by a max pooling layer and a sign layer. The last layer is a dense layer with dropout. As soon as the neural net is trained, the output of the sign layers is used as a label for the training of DCDL. The sign layers transform the outputs to binary values for the rule learner. The two convolutional layers and the dense layer are each approximated with Boolean formulas, which are generated by the rule learner. The dithered images are initially used as input to the rule learner. After the first rule learner, the input in the following rule learner runs is the output of the previous formula. The intermediate results of the NN serve as labels.
The approximation of the convolutional operation is, in contrast to the dense layer, not straightforward, so we will explain this process in detail here. Figure 3 shows the process graphically. In a convolutional layer, the input images are subsampled, and the samples are processed with the learned filters. Each sample is mapped to a value. This mapping creates a new representation of the images. Each filter gives its own representation. They are stacked as different channels. With the help of the sign layer, the representations are mapped to binary values.
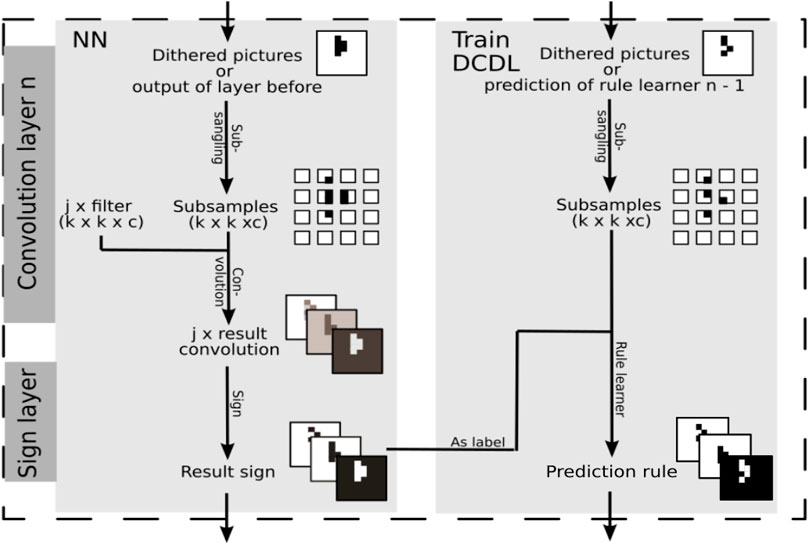
FIGURE 3. The approximation of a convolutional layer by the SLS algorithm. It is part of the whole experimental setup in Figure 2 as shown by the dotted box.
The process of subsampling also takes place for the input of the DCDL approach. These samples are the input for the rule learner. As labels serves the channel output of the sign layer belonging to the filter which is being approximated with the help of the rule learner. Thus, each filter will be approximated by a logical formula. Using this procedure, DCDL approximates the operation of the NN with Boolean formulas.
In the vanilla SLS approach, only the input images and the corresponding label predicted by the NN are provided to the algorithm. The architecture of the NN and its functionality are not taken into account. It is evaluated using two different methods. In the prediction approach, the prediction of the neural network is used as a label for training. In the true label approach, the true labels of the images are used for training.
We first focus on the question whether DCDL can better approximate the prediction of the neural network than the non-decompositional rule learning approaches. Our results in Figure 4 show that DCDL outperforms the non-decompositional rule learning approach on all three datasets and has the biggest advantage on the most complex dataset, CIFAR.
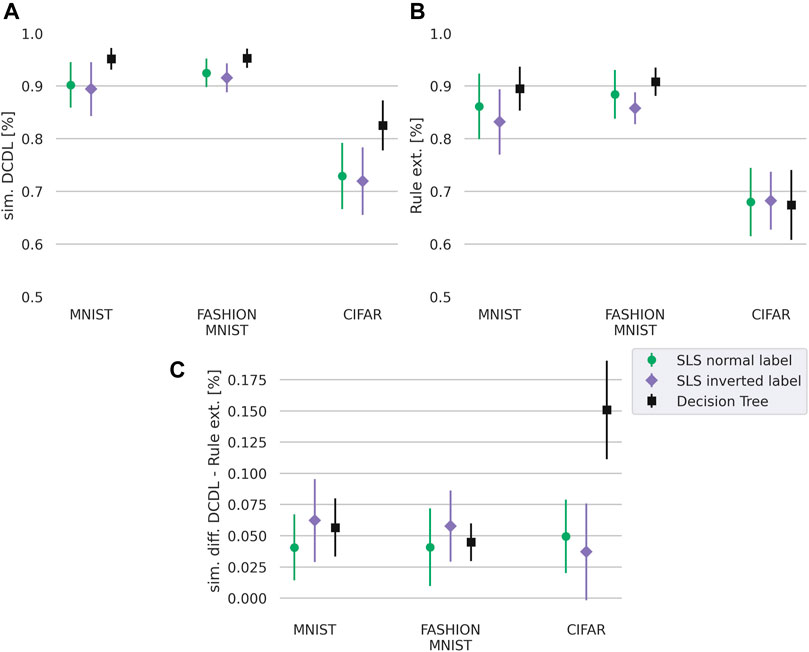
FIGURE 4. Similarity of the DCDL (A) and rule learning approaches (B) where for SLS we set
To calculate the similarity of the labels predicted by the neural network with the labels predicted by the rule learner, we calculate
with n as the number of labels, 1 the indicator function,
The above section shows that our method performs well in terms of similarity with the neural network. However, clearly, similarity does not necessarily correlate with accuracy. For example, it would be possible that the rule learner only models the errors that the network makes, leading to a high similarity but a bad performance on the actual labels. Therefore, we also compare the accuracy on the true labels of the predictions for the methods DCDL, vanilla rule learner (SLS or decision tree), and the neural network. For the vanilla rule learning algorithm, we differentiate between the method that was trained on the labels as predicted by the NN (rule learner prediction) and the method that was trained on the true labels (rule learner label). Again we use Eq. 5 to calculate the accuracy, but use the true labels of the test data instead of the labels predicted by the neural network.
Our results in Figure 5 show the performance on the task of learning to predict the label and show that the neural network outperforms the other methods. DCDL and the non-decompositional rule learning approaches SLS and Decision Tree perform at a comparable level except for the CIFAR dataset, where DCDL has a slight advantage over the non-decompositional rule learning methods as also shown by the significance values in Table 2. Here, we also evaluated the statistical significance using a corrected resampled t-test (Nadeau and Bengio, 2003) with
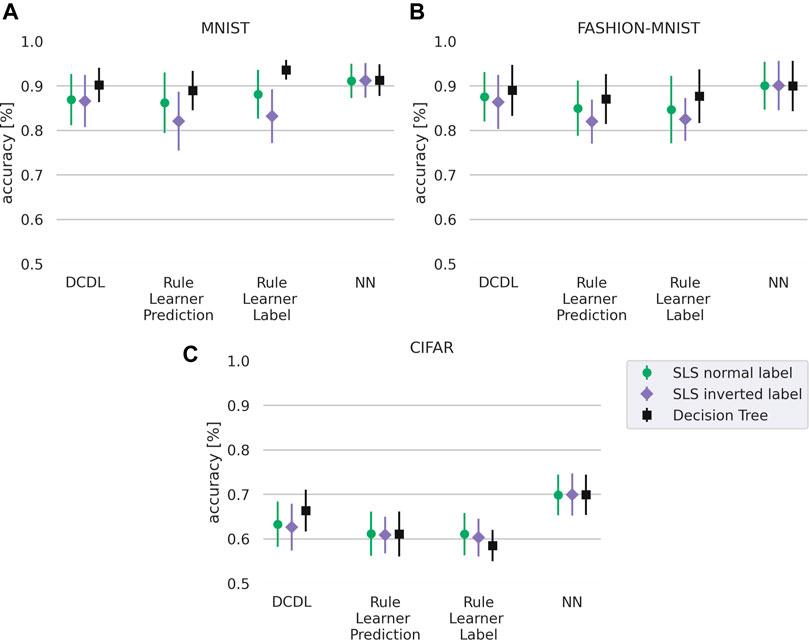
FIGURE 5. Accuracy for different datasets with normal label and inverted label of our DCDL approach, a rule learner, a rule learner with true labels, and the neural network. As rule learners we compare SLS with
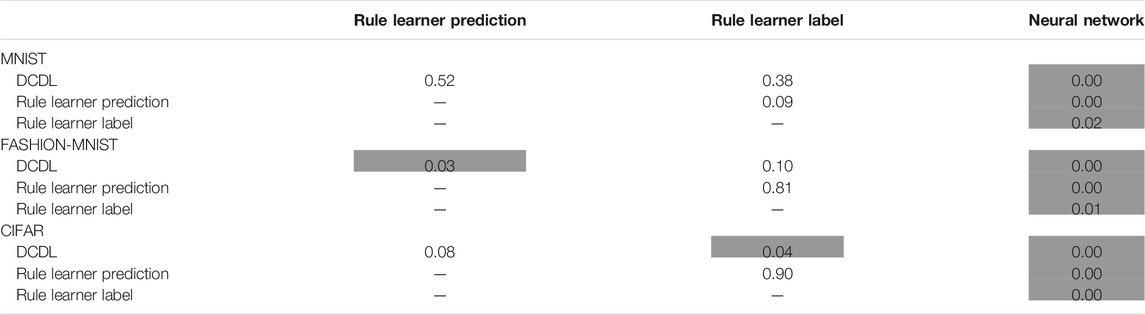
TABLE 2. Shown are p-values of the corrected resampled t-test (Nadeau and Bengio, 2003) for MNIST, FASHION-MNIST and CIFAR with SLS normal labels for the accuracy values plotted in Figure 5. Gray-shaded are the pairs for which the null hypothesis is rejected with significance level
To test this hypothesis we performed the same experiment with a different rule learner, a decision tree instead of the SLS. The result is shown in Figure 5 with corresponding significance values in Table 3. The decision tree is able to achieve a higher accuracy than the SLS algorithm. However, we note that the decision tree rule learner is a heuristic rule learning approach that relies on pruning whereas the SLS learner is theoretically well founded and adjustable in the parameter k. Higher values of the parameter k allow us to achieve better visualizations. While the rules with the SLS rule learner are less discriminative and achieve a lower accuracy, they are able to learn descriptive rules as shown in the next section. Overall, Figure 5 shows that DCDL is still superior to the vanilla rule learners in approximating the NN, even if the rule learner is changed.
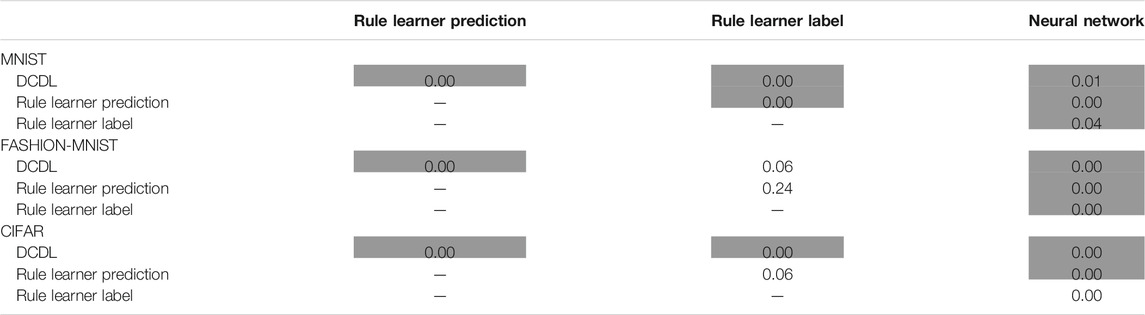
TABLE 3. Shown are p-values of the corrected resampled t-test (Nadeau and Bengio, 2003) for MNIST, FASHION-MNIST and CIFAR with decision tree normal labels for the accuracy values plotted in Figure 5. Gray-shaded are the pairs for which the null hypothesis is rejected with significance level
In addition to heuristic rule learners such as decision trees and approximate but well founded methods like SLS, another line of research develops exact and theoretically well founded rule learners (Demirović and Stuckey, 2020; Yu et al., 2020; Ignatiev et al., 2021). These models do not compare favorably to SLS in terms of runtime which does not make them a suitable choice in our model.
In Figure 5 we also evaluate the task of learning the inverse of the label which makes a difference in the case of the logic-based approaches. It can be seen as a harder task as the approaches need to learn what e.g. a one is not, instead of learning what a one is. Here, DCDL clearly outperforms the non-decompositional rule learning approach on the MNIST and FASHION-MNIST datasets and still provides a slight advantage on the CIFAR dataset, which also can be verified in Table 4. The poor performance of the classifiers on the CIFAR dataset is most likely partly caused by the dithering. The network architecture might also play a role. Overall we conclude from the results that on more complex tasks, the DCDL has an advantage over the non-decompositional rule learning methods.
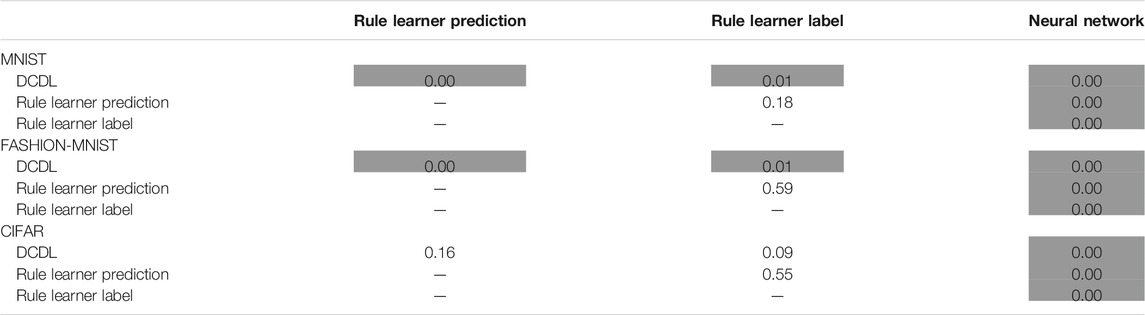
TABLE 4. Shown are p-values of the corrected resampled t-test (Nadeau and Bengio, 2003) for MNIST, FASHION-MNIST and CIFAR with SLS inverted labels for the accuracy values plotted in Figure 5 Gray-shaded are the pairs for which the null hypothesis is rejected with significance level
We already showed an example for the visualization of a simple formula in Section 3.1.1. Now, we want to look at the visualization of more complex formulas that are found by our algorithm. If the rule search is conducted with a small k, the visualized rules tend to be discriminative and often highlight only a single pixel, thus making them hard to interpret. To counter this, we set k to higher values in order to learn rules that are more characteristic. However, when visualizing k predicates for high k, this produces too many images to consider them individually. Therefore, we add a reduce step that sums the visualization of all formulas pixel-wize to one image X. Afterward X is scaled to the range −1 to 1 with .
As Figure 6 shows, this leads to visualizations that look almost like probability densities or prototypes. The comparison to the convolutional filters shows that this procedure leads to good visualizations that are comparable to the convolutional filters. The influence of different settings of the parameter k and results for several labels of FASHION-MNIST are shown in Figure 6.
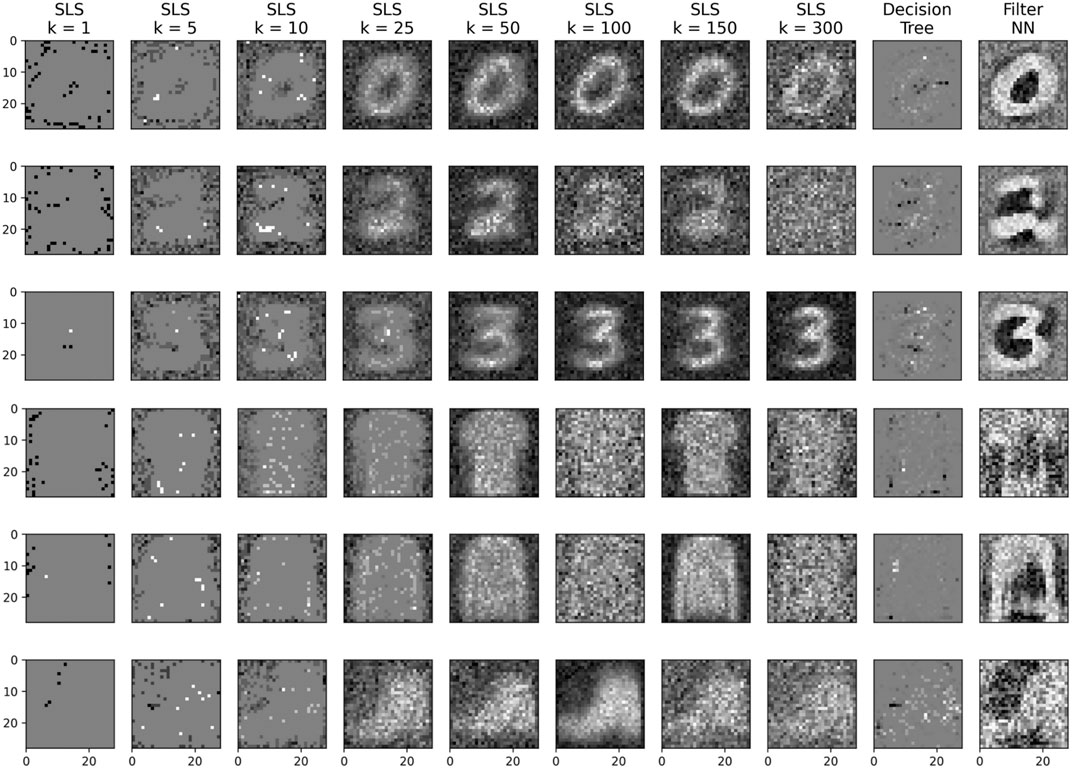
FIGURE 6. A visualization of the rules learned by the SLS algorithm (
Comparing the visualization of DCDL in Figure 6 with the visualization of the rules learned by the decision tree shows that the decision tree, as it presumable learns more discriminative rules, has visualizations that are, subjectively, harder to interpret. Therefore, while the decision tree learns rules with higher accuracy as discussed in the last section, it is less well suited to the visualization of the rules. The SLS however, allows to construct characteristic rules by increasing parameter k without affecting the accuracy (as shown in Figure 8 in the Supplementary Appendix).
The architecture of the neural network is shown in Figure 7. It consists of a convolutional layer followed by a sign layer and a dense layer. The dense layer converts the scalar output of the sign layer into a one-hot vector. The weights of the dense layer were set to [1,0]. The dithered images are the input for the SLS algorithm and the output of the sign layer is the label for the SLS algorithm. The visualization in Figure 6 was done on the MNIST dataset with a filter size that is equal to the size of the image. Note that for the case of MNIST, smaller filter sizes do not result in interpretable visualizations. However, in principle we can also choose filter sizes much smaller than the image itself if the images consist of complex scenes where the number itself is only a small part of the image for example. The selection of a filter size that leads to an interpretable visualization is left for future work.
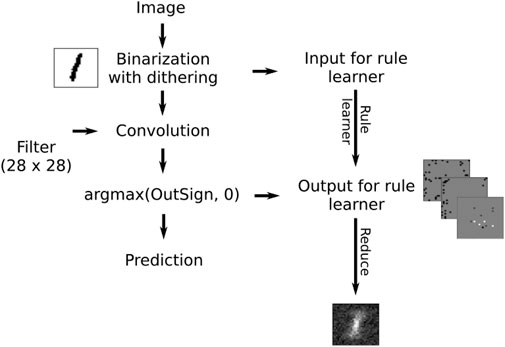
FIGURE 7. The test setup for approximating convolution operations with logical formulae.
We would like to emphasize that our goal is not to show that our rules lead to more interpretable visualizations than that of the filters itself. The comparison shows however, that the visualization of our rules leads to an image which is closer to a density rather than a flat pattern. The fact alone that we are able to visualize logical rules for images in this way, is a novel contribution in our view. This is in addition to other advantages that logical rules provide, which are not present in convolutional filters. To sum up, we showed with the help of a simple example how the individual predicates as well as the complete convolutional rule may be visualized.
We investigated how convolutional rules enable the extraction of interpretable rules for images from binary neural networks. We showed the successful visualization by means of an example. Additionally, the similarity to the functionality of the neural network was measured on three different datasets and found to be higher for the decompositional approach than the non-decompositional rule learning approach. We think there is potential in decompositional approaches for the extraction and visualization of characteristic rules. Although the logical formulas are large for human visual inspection on real-world data, their representation makes deep learning models, in principle, amenable to formal verification and validation.
In future research, we aim to incorporate further state-of-the-art components of NNs while preserving the ability of the network to be transformed into (convolutional) logical rules. Our work suggests that the combination of binary NNs and k-DNF is promising combination. To this end, one should develop a differentiable version of DCDL based on, e.g., differentiable sub modular maximization (Tschiatschek et al., 2018) or differentiable circuit SAT (Powers et al., 2018). Generally, one should explore DCDL as a new perspective on neuro-symbolic AI (Garcez and Lamb, 2020).
Publicly available datasets were analyzed in this study. This data can be found here: http://yann.lecun.com/exdb/mnist/, https://github.com/zalandoresearch/fashion-mnist, https://www.cs.toronto.edu/∼kriz/cifar.html.
The experiments were done by JB. The initial code basis was due to NW, the writing of the paper was mainly done by SB with input from JB and NW. ZA and SK were involved in the development of ideas, the polishing of the paper, and discussions throughout. KK gave feedback to the paper and helped with the writing of the submitted manuscript.
The work was funded by the RMU Initiative Funding for Research by the Rhine Main universities (Johannes Gutenberg University Mainz, Goethe University Frankfurt and TU Darmstadt) within the project “RMU Network for Deep Continuous-Discrete Machine Learning (DeCoDeML)”.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Part of this research was conducted using the supercomputer Mogon offered by Johannes Gutenberg University Mainz (hpc.uni-mainz.de), which is a member of the AHRP (Alliance for High Performance Computing in Rhineland Palatinate, www.ahrp.info) and the Gauss Alliance e.V. We thank the reviewers for their valuable and constructive criticism.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frai.2021.642263/full#supplementary-material
1This paper is an extension of three workshop papers that were presented at the DeCoDeML workshops at ECML/PKDD 2019 and 2020: Sophie Burkhardt, Nicolas Wagner, Johannes Fürnkranz, Stefan Kramer: Extracting Rules with Adaptable Complexity from Neural Networks using K-Term DNF Optimization; Nicolas Wagner, Sophie Burkhardt, Stefan Kramer: A Deep Convolutional DNF Learner; Sophie Burkhardt, Jannis Brugger, Zahra Ahmadi and Stefan Kramer: A Deep Convolutional DNF Learner.
2Implemented in https://python-pillow.org/.
3Based on https://github.com/hbldh/hitherdither, we also used the given error diffusion matrix.
4https://github.com/kramerlab/DCDL
5https://github.com/kramerlab/DCDL
Andrews, R., Diederich, J., and Tickle, A. B. (1995). Survey and Critique of Techniques for Extracting Rules from Trained Artificial Neural Networks. Knowledge-Based Syst. 8, 373–389. doi:10.1016/0950-7051(96)81920-4
Augasta, M. G., and Kathirvalavakumar, T. (2011). Reverse Engineering the Neural Networks for Rule Extraction in Classification Problems. Neural Process. Lett. 35, 131–150. doi:10.1007/s11063-011-9207-8
Bengio, Y., Léonard, N., and Courville, A. C. (2013). Estimating or Propagating Gradients through Stochastic Neurons for Conditional Computation. CoRR abs/1308.3432
Bologna, G. (2019). A Simple Convolutional Neural Network with Rule Extraction. Appl. Sci. 9, 2411. doi:10.3390/app9122411
Craven, M. W., and Shavlik, J. W. (1995). “Extracting Tree-Structured Representations of Trained Networks,” in Proceedings of the 8th International Conference on Neural Information Processing Systems (Cambridge, MA, USA: MIT Press), NIPS’95, 24–30.
[Dataset] Demirović, E., and Stuckey, P. J. (2020). Optimal Decision Trees for Nonlinear Metrics. arXiv.
Garcez, A. d., and Lamb, L. C. (2020). Neurosymbolic Ai: The 3rd Wave. arXiv preprint arXiv 2012, 05876.
Gehring, J., Auli, M., Grangier, D., Yarats, D., and Dauphin, Y. N. (2017). Convolutional Sequence to Sequence Learning. in Proceedings of the 34th International Conference on Machine Learning. Sydney, NSW, Australia: ICML 2017, 6–11. August 2017. 1243–1252.
González, C., Loza Mencía, E., and Fürnkranz, J. (2017). Re-training Deep Neural Networks to Facilitate Boolean Concept Extraction. in International Conference on Discovery Science. Springer, 127–143. doi:10.1007/978-3-319-67786-6_10
Hinton, G. E., Vinyals, O., and Dean, J. (2015). Distilling the Knowledge in a Neural Network. CoRR abs/1503.02531.
Hu, Z., Ma, X., Liu, Z., Hovy, E., and Xing, E. (2016). Harnessing Deep Neural Networks with Logic Rules. arXiv preprint arXiv 1603, 06318.
Hubara, I., Courbariaux, M., Soudry, D., El-Yaniv, R., and Bengio, Y. (2016). “Binarized Neural Networks,” in Advances in Neural Information Processing Systems 29. Editors D. D. Lee, M. Sugiyama, U. V. Luxburg, I. Guyon, and R. Garnett (New York: Curran Associates, Inc.), 4107–4115.
Huth, M., and Ryan, M. (2004). Logic in Computer Science: Modelling and Reasoning about Systems. USA: Cambridge University Press
Ignatiev, A., Lam, E., Stuckey, P. J., and Marques-Silva, J. (2021). A Scalable Two Stage Approach to Computing Optimal Decision Sets. arXiv preprint arXiv 2102, 01904.
Jia, K., and Rinard, M. (2020). “Efficient Exact Verification of Binarized Neural Networks,”. Advances in Neural Information Processing Systems. Editors H. Larochelle, M. Ranzato, R. Hadsell, M. F. Balcan, and H. Lin (Curran Associates, Inc.)), 33, 1782–1795.
Kane, R., and Milgram, M. (1993). “Extraction of Semantic Rules from Trained Multilayer Neural Networks,” in IEEE International Conference on Neural Networks (IEEE), 1397–1401.
Krizhevsky, A. (2012). Learning Multiple Layers of Features from Tiny Images. Toronto: University of Toronto
Lecun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998). Gradient-based Learning Applied to Document Recognition. Proc. IEEE 86, 2278–2324. doi:10.1109/5.726791
LiMin Fu, L. (1994). Rule Generation from Neural Networks. IEEE Trans. Syst. Man. Cybern. 24, 1114–1124. doi:10.1109/21.299696
Lin, X., Zhao, C., and Pan, W. (2017). “Towards Accurate Binary Convolutional Neural Network,” in Advances in Neural Information Processing Systems, 345–353.
Liu, Z., Wu, B., Luo, W., Yang, X., Liu, W., and Cheng, K.-T. (2018). Bi-real Net: Enhancing the Performance of 1-bit Cnns with Improved Representational Capability and Advanced Training Algorithm. Eur. Conf. Computer Vis. 747, 763. doi:10.1007/978-3-030-01267-0_44
Mahendran, A., and Vedaldi, A. (2015). “Understanding Deep Image Representations by Inverting Them,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 5188–5196.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A., Antonoglou, I., Wierstra, D., et al. (2013). Playing Atari with Deep Reinforcement Learning. CoRR abs/1312.5602
Nadeau, C., and Bengio, Y. (2003). Inference for the Generalization Error. Machine Learn. 52, 239–281. doi:10.1023/a:1024068626366
Narodytska, N., Zhang, H., Gupta, A., and Walsh, T. (2020). “In Search for a Sat-Friendly Binarized Neural Network Architecture,” in International Conference on Learning Representations
Odense, S., and Garcez, A. (2020). “Layerwise Knowledge Extraction from Deep Convolutional Networks,” in NeurIPS 2019 Workshop on Knowledge Representation & Reasoning Meets Machine Learning
Poplin, R., Chang, P.-C., Alexander, D., Schwartz, S., Colthurst, T., Ku, A., et al. (2018). Creating a Universal Snp and Small Indel Variant Caller with Deep Neural Networks. bioRxiv.
Powers, T., Fakoor, R., Shakeri, S., Sethy, A., Kainth, A., Mohamed, A.-r., et al. (2018). Differentiable Greedy Networks. arXiv preprint arXiv 1810, 12464.
Rastegari, M., Ordonez, V., Redmon, J., and Farhadi, A. (2016). Xnor-net: Imagenet Classification Using Binary Convolutional Neural Networks. Eur. Conf. Comput. Vis., 525–542. doi:10.1007/978-3-319-46493-0_32
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ““why Should I Trust You?”: Explaining the Predictions of Any Classifier,” in Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (New York, NY, USA: Association for Computing Machinery), 16, 1135–1144.
Ross, A. S., Hughes, M. C., and Doshi-Velez, F. (2017). “Right for the Right Reasons: Training Differentiable Models by Constraining Their Explanations,” in Proceedings of the Twenty-Sixth International Joint Conference on Artificial Intelligence, 17, 2662–2670. doi:10.24963/ijcai.2017/371
Rückert, U., and Kramer, S. (2003). “Stochastic Local Search in K-Term DNF Learning,” in Machine Learning, Proceedings of the Twentieth International Conference (Washington, DC, USA: ICML 2003), August 21-24, 2003), 648–655.
Schmitz, G. P. J., Aldrich, C., and Gouws, F. S. (1999). Ann-dt: an Algorithm for Extraction of Decision Trees from Artificial Neural Networks. IEEE Trans. Neural Netw. 10, 1392–1401. doi:10.1109/72.809084
Sethi, K. K., Mishra, D. K., and Mishra, B. (2012). “Kdruleex: A Novel Approach for Enhancing User Comprehensibility Using Rule Extraction,” in 2012 Third International Conference on Intelligent Systems Modelling and Simulation, 55–60.
Setiono, R., and Leow, W. K. (2000). Fernn: An Algorithm for Fast Extraction of Rules Fromneural Networks. Appl. Intelligence. 12, 15–25. doi:10.1023/A:1008307919726
Simonyan, K., Vedaldi, A., and Zisserman, A. (2013). Deep inside Convolutional Networks: Visualising Image Classification Models and Saliency Maps. arXiv preprint arXiv 1312, 6034.
Stecher, J., Janssen, F., and Fürnkranz, J. (2016). “Shorter Rules Are Better, Aren't They?,” in Discovery Science. Editors T. Calders, M. Ceci, and D. Malerba (Cham: Springer International Publishing)), 279–294. doi:10.1007/978-3-319-46307-0_18
Stone, A., Wang, H., Stark, M., Liu, Y., Scott Phoenix, D., and George, D. (2017). “Teaching Compositionality to Cnns,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 5058–5067.
Taha, I. A., and Ghosh, J. (1999). Symbolic Interpretation of Artificial Neural Networks. IEEE Trans. Knowl. Data Eng. 11, 448–463. doi:10.1109/69.774103
Thrun, S. B. (1993). Extracting Provably Correct Rules from Artificial Neural Networks Tech. Rep. (Bonn: University of Bonn).
Thrun, S. (1995). “Extracting Rules from Artificial Neural Networks with Distributed Representations,” in Advances in Neural Information Processing Systems, 505–512.
Tschiatschek, S., Sahin, A., and Krause, A. (2018). “Differentiable Submodular Maximization,” in Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence (International Joint Conferences on Artificial Intelligence Organization), IJCAI-18, 2731–2738. doi:10.24963/ijcai.2018/379
Tsukimoto, H. (2000). Extracting Rules from Trained Neural Networks. IEEE Trans. Neural Netw. 11, 377–389. doi:10.1109/72.839008
[Dataset] Xiao, H., Rasul, K., and Vollgraf, R. (2017). Fashion-mnist: A Novel Image Dataset for Benchmarking Machine Learning Algorithms.
[Dataset] Yu, J., Ignatiev, A., Bodic, P. L., and Stuckey, P. J. (2020). Optimal Decision Lists Using Sat.
Zeiler, M. D., and Fergus, R. (2014). “Visualizing and Understanding Convolutional Networks,” in European Conference on Computer Vision (Springer), 818–833. doi:10.1007/978-3-319-10590-1_53
Zhang, Q., Nian Wu, Y., and Zhu, S.-C. (2018). “Interpretable Convolutional Neural Networks,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 8827–8836.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Torralba, A. (2016). “Learning Deep Features for Discriminative Localization,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2921–2929.
Keywords: k-term DNF, stochastic local search, convolutional neural networks, logical rules, rule extraction, interpretability
Citation: Burkhardt S, Brugger J, Wagner N, Ahmadi Z, Kersting K and Kramer S (2021) Rule Extraction From Binary Neural Networks With Convolutional Rules for Model Validation. Front. Artif. Intell. 4:642263. doi: 10.3389/frai.2021.642263
Received: 15 December 2020; Accepted: 10 June 2021;
Published: 21 July 2021.
Edited by:
Fabrizio Riguzzi, University of Ferrara, ItalyReviewed by:
Yingnian Wu, University of California, Los Angeles, United StatesCopyright © 2021 Burkhardt, Brugger, Wagner, Ahmadi, Kersting and Kramer. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Sophie Burkhardt, YnVya2hhcmR0QGNzLnVuaS1rbC5kZQ==
†Present address: Sophie Burkhardt, Department of Computer Science, TU Kaiserslautern, Kaiserslautern, Germany; Nicolas Wagner, Department of Computer Science, TU Darmstadt, Darmstadt, Germany
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.