 William Duncan
William Duncan Breschine Cummins2
Breschine Cummins2 Tomáš Gedeon
Tomáš Gedeon- 1Immunetrics, Pittsburgh, PA, United States
- 2Department of Mathematical Sciences, Montana State University, Bozeman, MT, United States
This study addresses a problem of correspondence between dynamics of a parameterized system and the structure of interactions within that system. The structure of interactions is captured by a signed network. A network dynamics is parameterized by collections of multi-level monotone Boolean functions (MBFs), which are organized in a parameter graph PG. Each collection generates dynamics which are captured in a structure of recurrent sets called a Morse graph. We study two operations on signed graphs, switching and subnetwork inclusion, and show that these induce dynamics-preserving maps between parameter graphs. We show that duality, a standard operation on MBFs, and switching are dynamically related: If M is the switch of N, then duality gives an isomorphism between PG(N) and PG(M) which preserves dynamics and thus Morse graphs. We then show that for each subnetwork M ⊂ N, there are embeddings of the parameter graph PG(M) into PG(N) that preserve the Morse graph. Since our combinatorial description of network dynamics is closely related to switching ODE network models, our results suggest similar results for parameterized sets of smooth ODE network models of the network dynamics.
1 Introduction
The concept of a network plays a central role in systems biology, where it encodes interactions between the molecular species. Each directed edge has a sign, which represents either a monotonically increasing or monotonically decreasing effect of the source on the target. The restriction to monotone interactions suggests a possibility that there is a relationship between structure of the network and its emergent dynamics.
There are different types of dynamics that can be associated to a network. Some, like those generated by Boolean functions wherein each node can take on a value of 0 or 1, are very tightly linked to the structure of the network. On the other hand, the dynamics generated by ordinary differential equations (ODE) models with an interaction structure given by the network strongly depends on choice of non-linearities and parameters. Within the class of ODE network models, the question of limitations on dynamics imposed by network structure is much more difficult. In particular, one has to carefully define what constitutes the “same” dynamics to compare the dynamics of different networks. Traditional definitions used in comparison of dynamical systems include the concept of conjugate dynamics, or conjugate dynamics on a recurrent set Ω [1]. While the first condition is stronger, both conditions are very difficult to verify. To illustrate the difficulties, it is known that the hope that for a generic set of Morse-Smale systems the set Ω is finite is false [2].
In this study, we address the question of the relationship between network structure and its dynamics in the context of multi-valued Boolean systems in which each vertex can take on a set of integer values based on its number of out-edges. The approach is based on [3–6] Dynamic Signatures Generated by Regulatory Networks (DSGRN) which parameterizes the dynamics of a network with a collection of monotone Boolean functions (MBFs) that are compatible with its structure, that is, the monotonicity is compatible with the signs of the network edges. These collections are organized in a finite parameter graph PG that takes the form of a product graph PG = ∏u ∈ VPG(u) where the product is over vertices of the network. Each node in PG represents a collection of MBFs called a DSGRN parameter or just parameter. The edges in PG represent adjacency within the collections of MBFs.
There is a correspondence [7] between each DSGRN parameter and the dynamics of a switching ODE system [8–16], whose dynamics can be captured by a finite state transition graph (STG). A switching ODE can be approximated arbitrarily well by a smooth ODE system; there are rigorous results [17–19] that connect smooth ODE dynamics to that of a switching system and thus STG. DSGRN uses a more compact description of the dynamics of an STG in the form of a Morse graph (MG). Nodes of a Morse graph are strongly connected components of the STG, and the edges of MG are given by reachability within the STG. Therefore, our description of the dynamics of network N consists of its parameter graph PG(N) with an associated collection of Morse graphs MG(N), one for each node. Since the parameter graph PG(N) provides direct correspondence between the collection of monotone Boolean functions and the continuous time ODE dynamics of smooth approximations of switching systems, comparing the PGs across networks provides a global comparison between dynamic repertoires of these networks for both discrete and continuous time dynamics.
The connection between parameterization of continuous dynamics of switching systems and collections of multi-valued Boolean models of the same network was also described in Abou-Jaoudé and Monteiro [20]. While DSGRN starts with switching ODE system and arrives at Boolean description of ODE parameter domains, Abou-Jaoudé and Monteiro [20] starts with collection of multi-valued Boolean models and uses switching system parameters to generate sequences of Boolean systems. Changes in the structure of attractors are examined as an analog of bifurcations. The parameter graph PG is equivalent to the collection of all monotone multi-valued Boolean systems compatible with network N in Abou-Jaoudé and Monteiro [20]. The set of attractors is represented as the set of leaves in the Morse graph, and therefore, our description of dynamics using Morse graphs is more general.
With a finite characterization of network dynamics, it is natural to ask whether homomorphisms of signed directed graphs preserve network dynamics D(N): = (PG(N),MG(N)). We emphasize that we seek maps that preserve the graph structure of PG(N), where the map preserves the relationships between nodes given by edges. Under such a map not only dynamics at individual parameters p is preserved, but also the changes in the dynamics (bifurcations) between neighboring parameters p, q ∈ PG(N) are preserved. While we do not answer this question in its full generality, we study two important homomorphisms. First is the so-called switch map, introduced in Zaslavsky [21], on signed directed graphs that switches the signs of all edges incident to a set of vertices. In an ODE model, a switch can be realized via a change of variables x → −x for all variables corresponding to this set of vertices and has been used for monotone systems and monotone cyclic feedback systems to bring them to a normal form [22–24]. Clearly, a switch map preserves incidence of all edges and also the number and sign of all closed loops [21, 25–27]. In Aracena et al. [26], it was shown that a switch preserves the maximum number of fixed points of a network across all strict Boolean systems for that network. Here, we show that the maximum number of fixed points is preserved due to the preservation of all dynamics: A switch map induces an involution on the parameter graph PG that preserves the STG and hence MG. This shows that the dynamics of the two networks is the same.
The second homomorphism we study is inclusion of a network as subgraph in another network. This is a very important example in systems biology where gene regulatory networks cannot be assumed to be in their final form as new experimental evidence may reveal additional genes (nodes) and edges. Since the basis of any scientific approach is to study small problems first before using that knowledge to tackle larger problems, we must understand if, and how, the dynamics D(M) of a subnetwork M persists within the dynamics D(N) of a larger network N. Within the DSGRN framework, at some parameters p ∈ PG, a particular edge can be constitutively ON or constitutively OFF. We show that at parameters p ∈ PG where all edges in N\M are either constitutively ON or constitutively OFF, the parameter graph PG(M) is a subgraph of PG(N). In fact, we describe precisely the conditions under which there are several isomorphic copies of the parameter graph PG(M) within PG(N), where each copy carries the same collection of dynamics MG(M).
The second homomorphism is strongly motivated by systems biology. Gene regulatory networks do not exist in isolation and interact with other networks. It is important to understand if and under what conditions the dynamics of subnetworks persist within a larger network. As a motivating example, consider [28] where they considered the interaction of the yeast cell cycle network with the pheromone-sensing network that stops the cell cycle in the presence of mating pheromone. The study concludes that in the absence of pheromone the cell cycle network drives parts of the pheromone network, while in the presence of pheromone the cell cycle is driven to a rest state. One can conceptualize this interaction by assuming that the cell cycle network on its own supports a periodic orbit corresponding to the cell cycle and the pheromone-sensing network supports a steady state. This study shows that both of these dynamical behaviors occur in the larger network comprised of both subnetworks but at different parameters. This insight leads to the conjecture that by changing parameters it is possible for one or the other behavior to prevail within the larger network; however, at intermediate parameters, completely new dynamics may emerge.
A further motivating example comes from examining the subnetworks of the cell cycle itself, which support multiple phenotypes. The dual view of the cell cycle as either a biochemical “clock” vs. a set of “dominos”, that is, a series of switches where the completion of one step is required for the completion of the next step, has been discussed for at least 35 years [29, 30]. Support for the biochemical clock view comes, among others, from studies that showed that even in the absence of cyclins, a cell cycle-associated program of periodic transcription program is intact [31]. On the other hand, a bistable switch facilitates transition from G1 to S phase of the cell cycle [5, 32, 33], and other switches likely facilitate other checkpoints. Since recent modeling work suggests that different cell cycle phenotypes are the result of changes in parameters [34], these two views can be reconciled by realizing that cell cycle network [31, 34] contains multiple positive and negative feedback loops. Since negative loops in isolation can support periodic behavior [35], while positive loops can support bistability [36], the cell cycle phenotype depends on particular parameters (i.e., cellular conditions) that determine which behavior dominates. For instance, in many cancers, the uncontrolled proliferation is caused by defective checkpoints [37, 38]. How the checkpoint steady state dynamics driven by positive loops interacts with periodic behavior driven by negative loops, and the proximity of these behaviors in the parameter space, may suggest perturbations that restore the checkpoint function.
Apart from addressing a general question of comparison of dynamic repertoires of networks, the work presented here provides the capability to answer the rigorously central hypothesis of motif theory [39–41] within systems biology. Motifs are small networks with 3-4 nodes each that are postulated to have a particular cellular function based on their dynamics. However, it is not clear whether independent motif dynamics persists after embedding into a larger network. Our work suggests conditions under which the independent motif dynamics can be observed within the larger network.
We illustrate our work on a small network N in Figure 1A throughout the study. There are two motifs embedded in this network: a mutual activation loop PL (positive loop) between z and y and a negative feedback loop NL x ⊣ y → z → x. Theorems 5.4, 5.5 describe how the dynamics of these loops persists within the larger network in Figure 1A. We outline these results here on network N, while leaving the details for the text that follows.
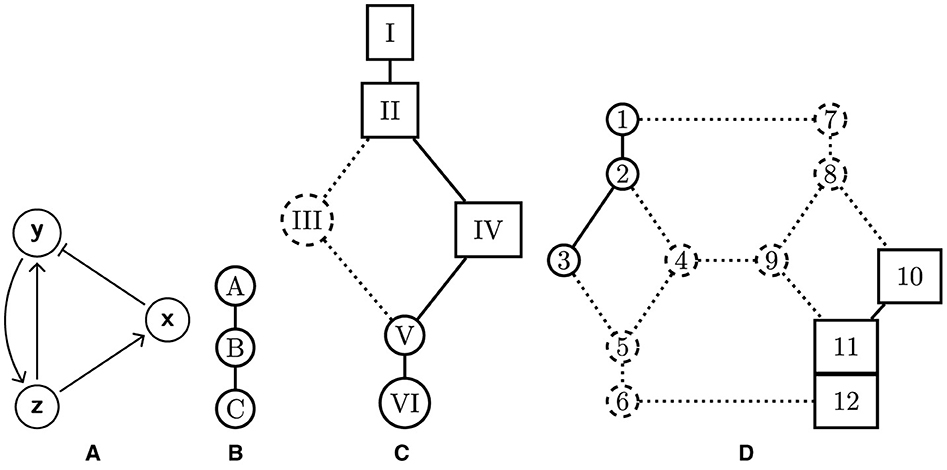
Figure 1. (A) Network N with positive loop motif PL between z and y and a negative loop motif NL x ⊣ y → z → x. (B) There are three monotone Boolean functions (MBF) at node x forming parameter factor graph PG(x); (C) six MBF forming PG(y); (D) twelve MBFs forming PG(z). The set of all parameters is PG(N) =PG(x) × PG(y) × PG(z). There are two embeddings of PG(NL) into PG(N). Both embeddings are products of PG(x) with subgraph of PG(y) and a subgraph of PG(z). When edge e:z → y is always ON, these subgraphs are {I,II, IV} and {10,11,12}, marked by square nodes. If the edge e:z → y is always OFF, the subgraphs are {IV,V, VI} and {1,2,3}, marked by circle nodes.
We represent all possible ways in which the network can function by enumerating a collection of monotone Boolean functions (MBF) (Section 2.1). These describe how the concentration levels of the input edge(s) of each node activate the output edges. Node x has single input and single output and there are three MBFs (see Table 1) that describe potential activation patterns of the output edge x ⊣ y in response to a Boolean input Z ∈ {0, 1}: a constant function with value 0 (A), a constant function with value 1 (C), and an identity function B. Figure 1B shows the structure of this set of MBFs where we join by an edge any MBFs that differ in a single value. This is the parameter factor graph PG(x).

Table 1. Three monotone Boolean functions in PG(x) with Boolean input Z.
In Figure 1C shows PG(y) consisting of MBFs with two inputs and one output and in Figure 1D is PG(z) of MBFs with one input and two outputs. Their structure is explained in Tables 2, 3 later in the study. The parameter graph of the network N is PG(N) =PG(x) × PG(y) × PG(z), the product of the parameter factor graphs.
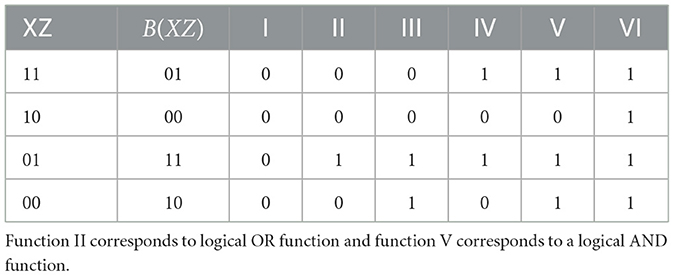
Table 2. Six monotone Boolean functions in PG(y) with Boolean inputs X and Z.
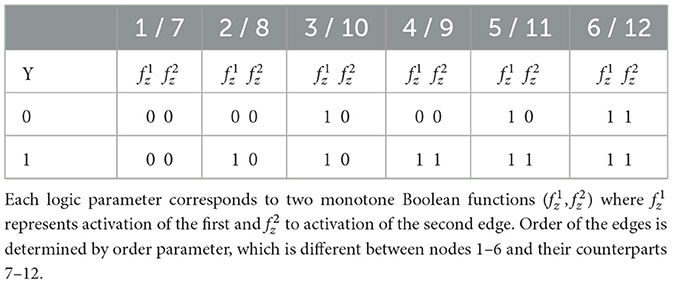
Table 3. Logic parameters of PG(z) corresponding to nodes 1-12 (first row).
As a consequence of Theorem 5.5, there are two subgraphs of PG(N) that are isomorphic to parameter graph of the negative loop PG(NL). These are products of PG(x) with subgraphs of PG(y) and PG(z) described in Figure 1. As explained in detail in Appendix B, there are four such embeddings of the parameter graph of the positive loop PG(PL) into PG(N) and consequently, at those parameters the dynamics of N is the same as that of the positive loop. These results make it possible to investigate relative positions of parameters that support bistability and those that support oscillations.
The organization of the study is as follows. In Section 2, we review the basic concepts of DSGRN: the parameter graph, state transition graph and Morse graph. In Section 3, we describe homomorphisms of signed graphs and a particular example of switching homomorphism. In Section 4, we show that the switching homomorphism preserves dynamics by inducing a graph isomorphism of the parameter graph that preserves dynamics. In Section 5, we start focusing on the network embedding as our second example of signed graph homomorphism. We formulate our main results as Theorem 5.4 about correspondence of dynamics at input inessential parameters and Theorem 5.5 at output inessential parameters. These Theorems are then proved in Sections 6 and 7, respectively. Section 8 contains discussion, while some proofs of the more technical results are delegated to the Section 8 and a detailed analysis of network N from Figure 1 is in Section 9.
2 Regulatory networks
A regulatory network N = (V, E, δ) is a directed graph with nodes V, directed edges E, and an edge sign function δ:E → {−1, 1}. We denote an edge from node u to node v without indicating its sign by u ⊸ v. The edge u ⊸ v is activating if and repressing if . Graphically, an activating edge is denoted by u → v and a repressing edge by u ⊣ v. The sources and targets of a node u are given by
respectively.
2.1 Parameters
The parameterization of the dynamics of a network depends on the choice of model. We discuss two different types of models and briefly review literature on how the parameterizations of these two types of models are related. Boolean models compatible with regulatory network N have a long history [11, 42, 43], and their study remains an active research area [20, 44–46]. There are two closely related but distinct types of Boolean models. The standard Boolean network model considers a single Boolean function at each node u which is monotone in each input respecting the edge sign δ. When a node is activated via fu = 1, then this activated state, in turn, activates all edges from u to T(u) [44, 47–49]. The parameterization of such a network involves enumerating monotone Boolean functions fu compatible with edge signs between S(u) and u. Often one is interested in non-degenerate [50] or, equivalently, observable [45] functions which are non-constant and each input affects the value of fu.
An alternative and richer set of models starts with the original work of Thomas et al. [42]. They consider discrete dynamics where u can selectively activate some nodes in T(u), but not others, as this activation happens at different thresholds for different targets. This naturally leads to the consideration of multi-level Boolean functions, where the discrete levels of node u are related to the number of nodes in T(u). Parameterization of all such possible multi-valued Boolean functions compatible with the network structure has been described by Abou-Jaoudé and Monteiro [20] and by Cummins et al. [3, 4], and Gedeon [6], arriving at the same concept from different perspectives. The goal of Abou-Jaoudé and Monteiro [20] is to construct natural families of multi-valued Boolean functions that describe changes in the dynamics as a function of a continuous parameter. In order to do this, they need to relate the collection of multi-valued Boolean functions to a continuous time differential equation switching model where the change of continuous parameter then induces a sequence of multi-valued Boolean functions. The sequence of attractors of these functions constitutes a logical bifurcation diagram.
As mentioned in the introduction, our work [3] starts with an ODE switching model and realizes that the continuous parameter space of these models decomposes to a set of domains each of which admits the same dynamics, as described by a discrete state transition graph. This naturally leads to the representation of this decomposition in a form of a graph, called a parameter graph where each node represents one such domain and edges represent co-dimension one boundaries (immediate proximity) in the parameter space. As we describe in more detail below, each node of the parameter graph is specified by two sets of information: the ordering of thresholds of edges u to T(u), which we call below an order parameter, and the description of values of the multi-valued Boolean function fu as a collection of monotone Boolean functions, each describing which Boolean inputs b ∈ 𝔹S(u) activate a particular node v ∈ T(u). This collection is called below a logic parameter. This description is equivalent to the multi-valued Boolean function description of Abou-Jaoudé and Monteiro [20] (Definition 2).
We now start with rigorous description of the set of parameters associated with a regulatory network N = (V, E, δ). This set depends on the nodes V and the edges E but not on the sign of edges δ. For simplicity, we fix the network N and suppress these dependencies. We will reintroduce the dependencies in later sections as needed.
Let mu: = |T(u)| denotes the number of target nodes of u. A u-order parameter is a bijection θu:T(u) → {1, …, mu} which defines an ordering of the out-edges of u. The set of u-order parameters is denoted by Θ(u). A collection θ: = (θu)u ∈ V is an order parameter. The set of all order parameters is given by Θ: = ∏u ∈ V Θ (u). The target nodes are ordered based on how easy are they to activate: As level of expression of node u increases, the target nodes will activate in the order given by the value of the order parameter.
Let 𝔹: = ({0, 1};0 ≺ 1}) be a Boolean lattice with natural order 0 ≺ 1 and let 𝔹n be a lattice of Boolean n vectors with order induced component-wise by ≺.
To define the logic parameter, we need the following definition.
Definition 2.1. A function f : 𝔹n → 𝔹 is a positive monotone Boolean function if b1 ≺ b2 implies f(b1) ≼ f(b2).
A u-logic parameter is a collection of positive monotone Boolean functions
satisfying the ordering condition
for all b ∈ 𝔹S(u). The purpose of the function is to describe when a given input b is above the activation threshold for the edge θu(v), that is, if then b is above the activation threshold for the edge u ⊸ v and if then b is below the activation threshold for the edge u ⊸ v. A collection f: = (fu)u ∈ V is a logic parameter. The set of all u-logic parameters is denoted , while the set of all logic parameters is .
The set of parameters is the product of logic and order parameters . We call the set of u-parameters and note the parameters are given by the product . The following section endows the set with structure of a graph by defining adjacency between elements of .
In Section 2.3, we show that the u-logic parameter fu can be equivalently described by a single multi-valued Boolean function gu. Such a description is used in Abou-Jaoudé and Monteiro [20].
2.2 The parameter graph
Two u-parameter nodes, are adjacent if exactly one of the following conditions is satisfied.
• Order adjacency: fu = gu and the values of the order parameters θu and ϕu are exchanged on a single pair of neighboring entries on which the logic parameters agree. Explicitly, there is an adjacent transposition π of {1, …, mu} such that θu = π°ϕu and for each i. Letting j be the index with j + 1 = π(j), we note that and fu = gu together imply .
• Logical adjacency: θu = ϕu and the u-logic parameters fu and gu differ in a single input. Explicitly, there is unique i ∈ {1, …, mu} and unique b0 ∈ 𝔹S(u) such that . For j ≠ i, we require for all b ∈ 𝔹n and for b ≠ b0 we require .
The u-factor graph is the undirected graph whose nodes are u-parameter nodes and whose edges are given by adjacency. The parameter graph is the Cartesian product PG: = ∏u ∈ VPG(u). That is, there is an edge if and only if there is a unique u ∈ V such that and for all v ≠ u.
We illustrate the parameter graph construction on network N in Figure 1A by constructing parameter factor graphs PG(y) in Figure 1C and PG(z) in Figure 1D.
First consider node y with S(y) = {x, z} and T(y) = {z}. Therefore, logic parameters are all monotone Boolean functions and since |T(y)| = 1 there is a single order parameter θz with value θy(z) = 1.
We list all MBFs at node y in Table 2. Note that the fact that the input from x is repressing is modeled by function B (see Equation 2) whose values are in the second column of the table. The edges in PG(y) in Figure 1C reflect parameter node adjacency.
Each node in the factor parameter graph PG(z) is a pair (fz, θz) where fz is a logic parameter and θz is an order parameter. Since there are two targets of z and T(z) = {x, y} there are two order parameters mapping x → 1 and y → 2, and mapping x → 2 and y → 1. Therefore, the logic parameter consists two MBFs, where models activation of the first target and the second target, given by the value of the order parameter. The order parameter corresponds to left half of PG(z) (nodes 1-6) and the order parameter to right half of PG(z) (nodes 7–12). Within each half, the order parameter is fixed, but the logic parameter changes and is described in Table 3.
2.3 Dynamics
The multi-valued Boolean dynamics associated with a network N = (V, E, δ) depends on a choice of parameter and the edge sign function δ.
The dynamics occurs on the state space
We call x ∈ X a state of the network N. The multi-valued Boolean function at each node will update the state based on the input that depends on the state, order parameter θ and the edge sign function δ. The state x = (xu)u ∈ V is mapped to an input to a node v via the input map
where
Note that for activating edge u → v, if xu is below (above) the activating threshold θu(v), then the input is 0 (1). This assignment is reversed if the edge is repressing.
An equivalent description of the u-logic parameter fu uses a single multi-valued Boolean function gu:Xu → Xu defined by
Clearly, for every logic parameter , there is well-defined multi-valued function gu; given gu and the order parameter θu, one can reconstruct the collection fu. Logic parameter description using a single multi-valued function gu is used in Abou-Jaoudé and Monteiro [20].
Definition 2.2. The dynamics for network N at parameter is defined as follows.
1. The multi-level Boolean target point is defined by
This map is also called the synchronous update [51] of the multi-level Boolean function g that corresponds to f.
2. The multi-level Boolean dynamics is a multi-valued map generated by and defined by
• If then .
• For any u and η ∈ {−1, 1} satisfying the state
satisfies .
The maps and implicitly depend on the choice of network and the associated parameters. We will explicitly include these dependencies as arguments as needed.
The multi-level Boolean dynamics can be represented as a a state transition graph STG(X) with vertices given by the states X: there is a directed edge in STG(X) if, and only if, .
2.4 The Morse graph
The recurrent dynamics of are encoded by a Morse graph MG(p). The Morse graph MG(p) = (SCC, A) is a directed graph with nodes SCC consisting of strongly connected components of STG(X, p). The Morse graph is the Haase diagram on SCC of the reachability relation on the corresponding strongly connected components within STG(X, p) SCC. We label each strongly connected component s ∈ SCC according to the following.
• If s ∈ SCC consists of a single recurrent state, s = {x}, then x is a fixed point of and we label s by FP(x).
• If s ∈ SCC is not an FP, then we label s as a partial cycle PC or a full cycle FC. The strongly connected component s is a PC if s is constant in at least one coordinate: There is a node u ∈ V and an integer k such that x ∈ s implies xu = k. If s is not an FP or an PC, then s is an FC.
• If s ∈ SCC has no out-edges in MG(p), then s is stable. Otherwise, s is unstable. The collection of stable s, that is, the leaves of MG(p), are the attractors described in Abou-Jaoudé and Monteiro [20]. While the attractors correspond to observable dynamics and hence are important in biological models, the unstable s plays a role in bifurcations under parameter changes.
3 Homomorphisms of signed networks
Following Naserasr et al. [27], we define a homomorphism of signed networks to be a graph homomorphism which preserves the signs of closed walks.
Definition 3.1. Let N = (V, E, δ) be a network.
• A walk of N is a sequence of edges v0 ⊸ v1 ⊸ ⋯ ⊸ vn. It is a closed walk if vn = v0. The sign of the walk is given by
• A switching homomorphism of network N = (V, E, δ) to a network M = (V′, E′, η) is a map h:V → V′ such that u ⊸ v ∈ E implies h(u) ⊸ h(v) ∈ E′ and a closed walk v0 ⊸ v1 ⊸ ⋯ ⊸ vn is positive in N if and only if h(v0) ⊸ h(v1) ⊸ ⋯ ⊸ h(vn) is positive in M.
The switching homomorphism between networks is a homomorphism of the underlying directed graphs with the additional constraint of preserved signs of closed walks. A switching homomorphism is distinct from a stricter notion of homomorphisms of signed graphs that require edge signs to be preserved [25, 27, 53]. We will see that switching homomorphisms are more natural in the context of network dynamics. The term switching homomorphism comes from the switching operation defined in Zaslavsky [21].
Definition 3.2. Let N = (V, E, δ) be a regulatory network and U ⊂ V. The U-switch of N is the network σU(N) = (V, E, η) where
Since this operation preserves both nodes V and edges E of N, and only changes the signs of the edges, we will often write η = σU(δ).
The U-switch is motivated by the following change of variables in an ODE system associated with the network N. To N we associate a system of ODEs where a single variable represents each node and where the type (increasing vs. decreasing) monotone interactions between variables is represented by the sign of the edges. Then, the U-switch corresponds to a change of variables x → −x for all x ∈ U. Such a change of variables reverses sign of all edges adjacent to a vertex x ∈ U (see Figure 2).
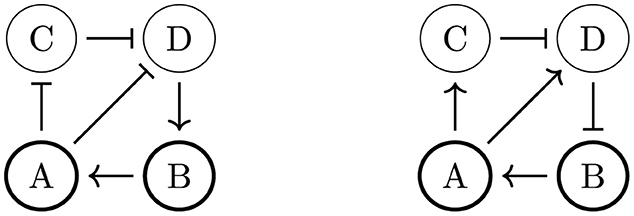
Figure 2. U-switch of network N. Original network N on the left with set U = {A, B} in bold. The network σU(N) on the right.
For any choice of U, the U-switch is a switching homomorphism and an involution; therefore, it is a switching isomorphism. In Naserasr et al. [27], it was shown that any switching homomorphism is a U-switch followed by an edge sign preserving homomorphism. Basic properties of the switch operation are recorded in the following proposition.
Proposition 3.3. 1. If U = V then σU is the identity: σU = Id.
2. For all U ⊂ V, σU is an involution: σU ∘ σU = Id.
3. Given U, W ⊂ V, σU and σW commute: σU ∘ σW = σW ∘ σU.
4. Given U = {u1, …, un} ⊂ V, .
4 Switch isomorphisms preserve network dynamics
In this section, we examine the relationship between the dynamics of network N and the switched network σU(N). Since the switch operation σU fixes the nodes V and edges E, and the set of parameter nodes does not depend on the edge signs, we have .
Before we formulate the main result, we outline the main idea. Define bijection λU:X → X component-wise by
That is, λU reflects the components Xu for each u ∈ U and is the identity on the components Xu for u ∉ U. Clearly, λU is an involution. Then, given at parameter , the map is isomorphic to . Therefore, both synchronous dynamics given by iterates of and asynchronous dynamics given by on STG are identical. The main result of this section precisely identifies the map on the parameter graph such that . Importantly, we show that the map DU is graph automorphism; that is, it maps not only nodes to nodes but also edges to edges.
Theorem 4.1. Given the U-switch σU, there is an induced isomorphism and a bijection λU:X → X such that the the following diagram commutes
In other words, the dynamics of and is conjugate at parameters related by DU. The map λU is a graph isomorphism between the STG representing and the STG representing . Consequently, the Morse graphs MG(p) and MG(DU(p)) are isomorphic and corresponding Morse nodes have the same label.
A consequence of Proposition 3.3(4) is that we need only to demonstrate that the diagram Equation 3 commutes in the case that U = {u} consists of a single node.
4.1 The dual parameter map DU
Let u ∈ V be a node and be a u-parameter. The dual parameter to pu is defined to be qu = (gu, ϕu) where
and mu = |T(u)|. The reason we say qu is the dual parameter to pu is because is the dual Boolean function to . There is a large literature on dualization of Boolean functions and its computational complexity. See, for example [54].
Define to be the map from a u-parameter to its dual parameter. The following Lemma is a direct consequence of the definition of du.
Lemma 4.2. Given any u-parameter , its dual parameter , that is, the map du is well-defined. Moreover, du is an involution: du ∘ du = Id.
Proof. We show that . Clearly, ϕu is a valid order parameter. We now show that gu satisfies the ordering condition (Equation 1). Since fu satisfies the ordering condition, we have and therefore . By Definition 4, so that gu satisfies the ordering condition. Next, we show that is an MBF. Let b1 ≺ b2, which implies ¬b1 ≻ ¬b2. Since is an MBF, we have
This shows is an MBF.
The second part of the Lemma follows by inspection. □
We are now ready to define the parameter graph isomorphism corresponding to σU. Since σU fixes the nodes V and edges E, and the set of parameter nodes does not depend on the edge signs, we have . Therefore, we will omit the network N from the argument of the parameter set and the parameter graph PG.
Let U ⊂ V. The U-dual parameter map is defined by
Proposition 4.3. The U-dual parameter map DU is a graph automorphism of PG for all U ⊂ V.
Proof. By Lemma 4.2 du, is an involution on . Since each component of DU is either the identity on that component or given by du, DU is an involution on and hence a bijection. It remains to show that DU preserves parameter graph adjacency.
Let be adjacent parameters. Let q = (g, ϕ) = DU((f, θ)) and . Furthermore, let u be the unique node such that pu and are adjacent. For w ≠ u, and therefore .
First suppose pu and are order adjacent. Then there is an adjacent transposition π such that
If u ∉ U then ϕu = θu and so that qu and are order adjacent. If u ∈ U, then
where τ(i): = mu + 1 − π(mu + 1 − i) is an adjacent transposition. Order adjacency of pu and implies and thus , so we conclude q and are order adjacent.
Finally, suppose pu and are logically adjacent. If u ∉ U then qu = pu and so that qu and are logically adjacent.
If u ∈ U, then and thus . Let i be the unique index and b0 be the unique input such that . Then
and for b ≠ b0, so that
Similarly for j ≠ i and any b
We conclude that mu + 1 − i is the unique index and ¬b0 is the unique input such that It follows that q and are logically adjacent.
Since DU is invertible and preserves both order and logical adjacency, DU is an automorphism of PG.
□
4.2 Preservation of dynamics
The difference between the target point map for the network N and the network σU(N) is due to the dependence of the input map Bu (see the beginning of Section 2.3) on the edge signs δ. The following lemma relates the input map Bu(·;θ, δ) for N and the input map Bu(·;ϕ, σU(δ)) for σU(N). By Proposition 3.3(4), we need only consider the case U = {u}.
Lemma 4.4. Let, u ∈ V, , and (g, ϕ) = D{u}((f, θ)). Let η = σ{u}(δ). Then for all w ∈ S(u),
For v ≠ u and all w ∈ S(v),
Consequently,
for v ≠ u.
Proof. To simplify notation, let λ = λ{u}.
First consider w ∈ S(u)\{u}. Since λw = Id and ϕw = θw, we have xw < θw(u) if and only if λw(xw) < ϕw(u). Equation (5) then follows after observing .
Next, we consider the case u ∈ S(u), that is, a self-edge. Note that for all v ∈ T(u),
So, if u ∈ S(u), we have xu < θu(u) if and only if xu ≥ ϕu(u). Since , Equation (5) holds with w = u.
Now, suppose v ≠ u and w ∈ S(v). If w ≠ u, then λw = Id, ϕw = θw, and implies Equation (6) holds. If w = u, then xu < θu(v) holds if and only if
Since , Equation (6) holds. □
Proof of Theorem 4.1. By Proposition 3.3(4), it is sufficient to consider the case U = {u}. To simplify notation, we omit U as an argument of λ and D and let η = σU(δ). Let p = (f, θ) and (g, ϕ) = D(p) be the U-dual parameter.
Note that for v ≠ u, λv(xv) = xv, gv = fv, and, by Lemma 4.4 also Bv(x; θ, δ) = Bv(λ(x);ϕ, η). Therefore
Consequently, if we denote then .
For node u itself, we have
Consequently, with ,
We have shown that λU verifies the conjugacy of and . Since is derived from , it follows that λU is a graph isomorphism between STG(p, N) and STG(DU(p), σU(N)). Since the STGs are isomorphic, the corresponding Morse graphs MG(p) and MG(DU(p)) are isomorphic. □
Remark 4.5. We want to point out that when U = V the set of all nodes, and the switch σV:N → N is the identity, the map is not necessarily an identity automorphism on the parameter graph. As we will show in Section 8, the non-trivial automorphism DV commutes with network projections defined in the next section.
5 Embedding
In this section, we address the question of when the dynamics of a subnetwork M agree with the dynamics of a larger network N. In fact, we find it more convenient to consider the inverse operation of removing (cutting) edges of a regulatory network N and study the effect on the dynamics.
Definition 5.1. Let N = (V, E, δ) be a regulatory network and be a set of edges. The -cut of N is the network where
Alternatively, the map satisfying is a graph embedding (inclusion).
Since the cut operation only removes edges from N, our results will only explicitly apply when considering subnetworks M ⊂ N which have the same number of nodes. This assumption is convenient but not restrictive; if is a subnetwork of N with V′ ⊂ V, then we may add the missing nodes to M′ and consider . A missing node u ∈ V\V′ is completely disconnected from every other node; its state is fixed and plays no role in the dynamics. The dynamics of M′ and M are therefore identical.
We outline the main ideas of this section. Our goal is to relate the dynamics of network N at a parameter with dynamics of subnetwork M at a parameter . In general, there is no such relationship as cutting edges will result in a change in dynamics. However, there are parameters p where one or more edges play no role in the dynamics. This happens when an edge is always active or always inactive, that is, one of the functions is constant. We call the corresponding edge u ⊸ v an output inessential edge. In the context of Boolean functions, such function has been called a degenerate [50] or non-observable [45] function. In addition, even when is non-constant, there may be cases where the edge u ⊸ v never independently causes a change at a target node. These will be called input inessential edges (see Definition 5.2 below). Clearly, at a parameter , there can be multiple edges of both types and we expect that cutting any subset of these edges would result in a network M with the same, or similar, dynamics.
However, there are important differences between these two types of edges. At a parameter where we remove only input inessential edges from N to create subnetwork M, the thresholds corresponding to cut edges do not affect the dynamics. As a consequence, the direction of edges in pairs of domains straddling such a threshold is the same and we can combine these pairs to a single domain (see Figure 3). This operation results in semi-conjugacy between the dynamics of X(N) and X(M), described in Theorem 5.4.
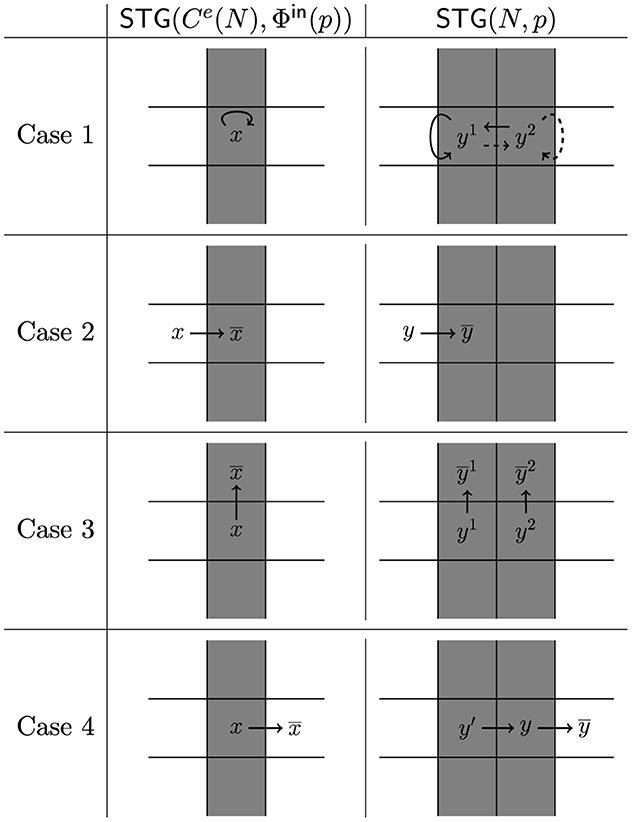
Figure 3. Maps of edges in STG(N, p) under the collapse map μe. The gray regions indicate (right) the layer about u ⊸ v in the state transition graph of N, and (left) the collapse map of the layer, , in the state transition graph of Ce(N). Each row represents a case from Proposition 6.1 that relates how the arrows in STG(N, p) are altered under the collapse map. In Case 1, either both undashed arrows or both dashed arrows are in STG(N, p), but not both.
On the other hand, at parameters where we remove output inessential edges, we find that the result can be strengthened in two important directions. First, the dynamics at and the dynamics at the corresponding parameter are conjugate, rather than semi-conjugate. In fact, we will identify a subgraph of X(N) that is isomorphic to X(M) (see Figure 4). More importantly, we show that the map has a collection of well-defined right inverses with disjoint images. Each inverse is a graph embedding of into a subgraph of , and the images are mutually disjoint. Therefore not only dynamics, but parameterized dynamics of M is embedded inside parameterized dynamics of . Furthermore, this dynamics is embedded multiple times within the parameterized dynamics of .
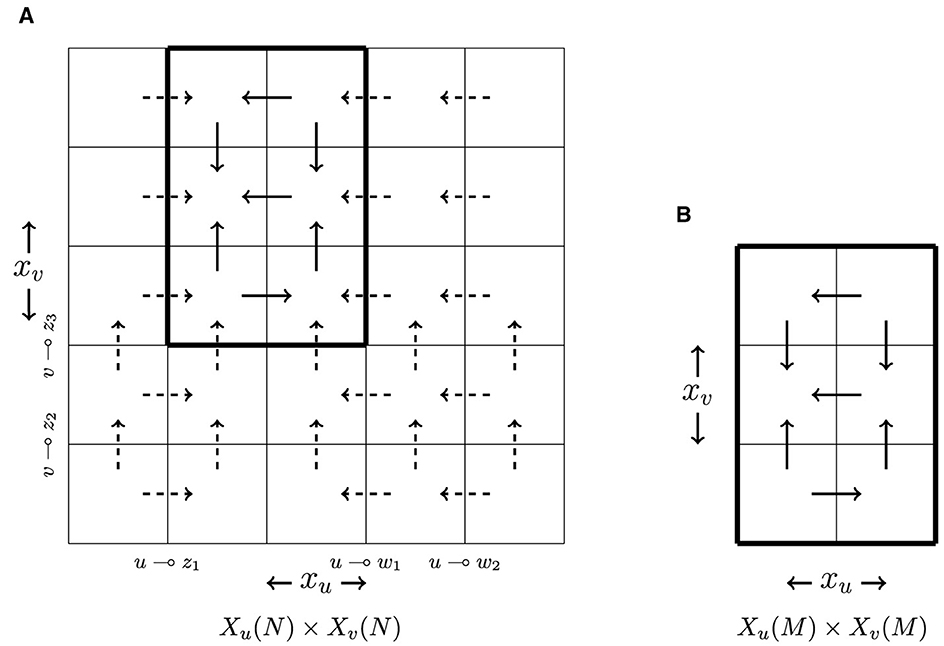
Figure 4. The (OFF,ON)-attractor X(OFF,ON). (A) Projection of X(N) into two dimensions; the subspace Xu(OFF,ON) × Xv(OFF,ON), outlined in bold, is an attractor in X(N). The dashed arrows between states in STG(N, p) are implied by the fact that . The solid arrows represent transitions that are dependent on the specific choice of . Boundaries corresponding to edges in OFF and ON are labeled with their corresponding edges. Here, T(u;ON) = {z1}, T(u;OFF) = {w1, w2}, T(v;ON) = {z2, z3}, and T(v;OFF) = ∅. (B) STG(M, Φ(p,OFF,ON)) for network is isomorphic to the subgraph of STG(N, p) contained in X(OFF,ON).
We now proceed with precise description of inessential edges.
Definition 5.2. Let be a parameter.
• The edge u ⊸ v ∈ E is output-off inessential at p if , that is, when the monotone Boolean function corresponding to u ⊸ v is always off, and output-on inessential at p if , that is, when the monotone Boolean function corresponding to u ⊸ v is always on. If u ⊸ v is neither output-off nor output-on inessential, then u ⊸ v is output essential.
• The edge w ⊸ u ∈ E is input essential at p if there is an i ∈ {1, …, mu} and a b ∈ 𝔹S(u) such that where ew ∈ 𝔹S(u) is defined by
Otherwise, the edge w ⊸ u ∈ E is input inessential.
• An edge u ⊸ v ∈ E is essential at p if it is both input and output essential and inessential otherwise. We say that the parameter p is output or input inessential if there is an edge which is output or input inessential at p, respectively.
While the output inessential edges u ⊸ v transmit constant information to node v, the input inessential edge w ⊸ u does not affect the node u in the sense that if u changed state, there must be an input node w′ ≠ w that also changed state.
Example: To illustrate the input and output inessential edges consider PG(y) from Figure 1C. The essential parameters are II (logical function AND) and V (logical function OR). Functions I and VI are constant and thus both input and output inessential; I is output-off inessential, and VI is output-on inessential. Note that the function III copies the value of the input ¬X; this implies that the edge x ⊣ y is input essential, but the edge z → y is input inessential. Similarly, function IV makes x ⊣ y input inessential but z → y is input essential. At both parameters III and IV, the output edge y → z is output essential.
In parameter factor graph PG(x) in Figure 1A, the node B is essential, while both A and C are both input and output inessential.
Finally, in parameter graph PG(z) only the nodes 4 and 9 are essential, all others are inessential.
In the following exposition, it will be easier to consider the cutting of input inessential and output inessential edges independently, that is, will either consist of a single input inessential edge or a set of output inessential edges. Since the cut edges can be decomposed into these groups, and because we show in Proposition A4 that maps defined on these independent groups commute, the relationship between the dynamics of N and can be described for an arbitrary collection of inessential edges .
We define the set of parameter nodes in where it is possible for the dynamics to be related to a parameter node by cutting a single input inessential edge e or a set of output inessential edges. For a given set of nodes S ⊂ V let T(u; S) = T(u)∩S.
Definition 5.3. Let e ∈ E be an edge u ⊸ v. Then
• Let be a set of parameters at which the edge e is input inessential.
• Let be the set of parameters such that
1. each edge e ∈ OFF is output-off inessential at p,
2. each edge e ∈ ON is output-on inessential at p, and
3. for every u ∈ V, the edges in ON are ranked first by θ and the edges in OFF are ranked last by θ:
Note that , but that may not be empty as there can be parameters at which a given edge e is both input and output inessential. Note further that it is the last condition (3) for output inessential edges that motivated us to define for a set rather than for a single edge as in the input inessential case.
We define in Section 5.1 two projections. First,
that relates parameters with the same dynamics when we cut a single input inessential edge from N. Second, consider the case when consists of (several) output inessential edges. We define a projection map
that relates parameters with the same dynamics when we cut a collection of output inessential edges. Importantly, as we show in Proposition 8.4, these two projections commute:
The following two theorems are the main results of this section, establishing a correspondence between the dynamics of the networks N and .
Theorem 5.4. Let e ⊂ E be an input inessential edge and be an input inessential parameter. The projection Φin(·;e) satisfies the following.
1. There is a surjective map μe:X(N) → X(Ce(N)) such that the target point map is semi-conjugate to , that is, the following diagram commutes
2. The Morse graph MG(Φin(p), Ce(N)) is a subgraph of MG(p, N).
3. There is a one-to-one correspondence between the Morse nodes labeled FP that contain fixed points of the dynamics.
The semi-conjugacy of the dynamics is strengthened to conjugacy when every cut edge is output inessential so that
Theorem 5.5. Let and be an output inessential parameter. The projection Φ(·;OFF,ON) has a collection of right inverses indexed by order parameters ζQ ∈ Θ(OFF) and ζR ∈ Θ(ON), and anchoring logics (Definition 7.5). For each choice
1. The target point map is conjugate to restricted to a subset X(OFF,ON) ⊂ X(N), that is, the following diagram commutes
Consequently, the map ρOFF,ON is an embedding of the state transition graph into STG(X(N), p).
2. The Morse graph is a subgraph of MG(p, N). The only Morse nodes of MG(p, N) that do not correspond to a node in must be labeled PC and have a successor node in the Morse graph.
3. ;
4. is a graph embedding.
In the remainder of the section, we will build the machinery for the proofs of Theorems 5.4, 5.5, to be found in Sections 6, 7, respectively.
5.1 The projection maps Φin and Φ
In this section, we define the projection maps
where the set of cut edges is in the first case and in the second.
Given a subset of edges E′ ⊂ E, it is useful to define
to be the set of source and target nodes of u which correspond to edges in E′, respectively.
To define either of the projections Φin, Φ for given parameter , we need to construct a subnetwork parameter .
The idea for the construction of the order parameter ϕu from θu is simple: We define ϕu so that the ordering of the uncut edges is the same as the ordering given by θu. Explicitly, for (g, ϕ) = Φ((f, θ);OFF,ON) where the set could have more than one element, we proceed as follows. For each u ∈ V and v ∈ T(u), define
to be the number of out-edges of u with rank less than θu(v) which are cut from N. The u-order parameter is defined by
For (g, ϕ) = Φin((f, θ);e) we proceed in the same way realizing that has a single element.
To construct a from , we will replace inputs that correspond to edges in in function f by constant inputs. If the edge is input inessential at parameter p, we can replace this input by either 0 or 1; since the edge is input inessential, the value of g does not depend on the value that is selected. On the other hand, if the edge is output inessential, the values of these constants depend on whether the cut edge e = (w ⊸ u) belongs to set ON, whether it belongs to set OFF, and the sign of the edge. We start with this latter case. Assume and let . We construct a logic parameter from f as follows. For each , let
That is, is the constant input from w to u based on whether the edge w ⊸ u ∈ OFF and therefore inactive or w ⊸ u ∈ ON and therefore active. Let be the collection of these inputs. The function is constructed by evaluating the function . In general, there are fewer inputs to gu then to fu. So, for a given input to gu, its value is computed by evaluating fu on the same input with missing inputs replaced with βu. For each , we define
The (OFF,ON)-projection of onto is defined to be
Assume now and let . Let e = (w ⊸ u). Let be arbitrary. We then define as in Equation 13. Because w ⊸ u is input inessential, is independent of the choice of . Then, the Φin(·;e) projection of onto is defined to be
Remark 5.6. An astute reader will notice that the definition of Φin and Φ only differs in choice of fixed input β; in Equation 12 for output inessential parameters, the choice is dictated by the membership of the cut edge in ON vs. OFF, while for input inessential parameters β can have arbitrary value since this value does not affect the target node. This can be expressed by
that is, the Φin(p; e) agrees with Φ(p) if we chose to designate the edge e as either belonging to ON or to OFF set of edges.
Remark 5.7. Observe that although we designated the domain of Φ as the set of parameters in , the map Φ is well-defined on the entire parameter space . Using relationship (Equation 14), the map Φin is also defined on . However, there is only a well-predicted relationship between the dynamics of N and for -cuts that are composed entirely of inessential edges. For -cuts involving essential edges, the relationship between the dynamics of N and the dynamics of the cut network is unknown.
In Section 8, we provide some algebraic properties of Φ. In particular, in Theorem 8.1, we show that the V-dual automorphism , which is a result of the switch map σV that changes the signs of all edges incident to all nodes, commutes with Φ when the identities of OFF and ON edges are switched: letting ,
We also prove that Φin(·;e) commutes with DV.
6 Input inessential parameters
6.1 Proof of Theorem 5.4
Recall that denotes the set of parameters p such that the edge e = u ⊸ v is input inessential. Define the layer
to be the set of states which border the threshold corresponding to u ⊸ v. Note that has “thickness” 2 in u direction as all states x have xu with one of two values. See the gray double rectangles in the right column of Figure 3 as an illustration of a layer surrounding a threshold.
Given an edge e = u ⊸ v, let μe:X(N) → X(Ce(N)) be the map which collapses to a thickness 1 layer with single u-state:
An illustration of this collapse is given by comparing the single gray rectangles in the left column of Figure 3 to the double gray rectangles in the right column. The left column is a portion of the state space of Ce(N), while the right column is a portion of the state space of N.
In Proposition 8.3, we show that μe commutes with λV, the reflection bijection defined at the beginning of Section 4, as is suggested by Theorem 8.1 which says Φin and DV commute.
Proof of Theorem 5.4 (1). Let with e = u ⊸ v. To simplify notation, let M = Ce(N).
For w ∈ V\{u, v}, pw = qw and is the identity so that the target point maps commute with the collapse map
Next, we consider node u. To show that the input maps Bu to node u (used to define the target point map in Section 2.3) for both networks agree, let x ∈ X and w ∈ S(u; M), that is, there is an edge w ⊸ u. If w ≠ u, then and θw = ϕw so that . If w = u, that is, there is a self-edge u ⊸ u, then, recalling the definition of ϕu Equation 11 and comparing to , we have . Consequently,
If v = u, we need to compare the logic parameters fu and gu. By assumption, is independent of bu since u ⊸ v is input inessential at p. Since the inputs to fu and gu agree,
If , then Equation 15 and the definition of imply that the u target point maps agree on x and μe(x), that is, . Moreover, implies , so that . Similarly, if , then
as desired.
Finally, we consider node v, assuming v ≠ u. For all w ≠ u, is the identity and ϕw = θw, so that . Since fv(b) is independent of bu, we have
which implies for all x ∈ X since is the identity. This completes the proof.
□
Theorem 5.4 (2) follows from the semi-conjugacy: For any path in X(Ce(N)), there is at least one path τ in X(N) with .
To prove Theorem 5.4 (3), we need the following Proposition that shows that most of the edges in STG(N, p) can be recovered from STG(Ce(N), Φin(p)). Each case in the proposition is illustrated in Figure 3.
Proposition 6.1. Consider a single edge . Let , and q = Φin(p; e). Let . If , then there are unique with μe(y) = x and such that .
On the other hand, if or , then there are four cases.
1. If , then there there are exactly two y1, y2 ∈ X(N) with μe(y1) = μe(y2) = x. Either y1 → y2, y2 → y2 ∈ STG(N, p) or y2 → y1, y1 → y1 ∈ STG(N, p).
2. If , then there is a unique edge with μe(y) = x and .
3. If and , then there are two edges with μe(yi) = x and for i = 1, 2.
4. If and , then there is a unique edge with μe(y) = x and . In addition, the state has an edge y′ → y ∈ STG(N, p).
Proof. First suppose and . We start by noting that the map for w ≠ u is an identity on a finite set Xw and it is strictly monotone in that it satisfies
for η ∈ {±1}. Furthermore, , which is not an identity, satisfies (Equation 15) for all pairs , and satisfies the forward implication in Equation 15 when or .
Since μe is injective on , there are unique with μe(y) = x and . Since , there is a unique node w ∈ V (recall N = (V, E, δ)) and η ∈ {±1} with and therefore . Applying Theorem 5.4 1 and Definition 2.2, we have
Using Equation 15 with and , we conclude that
which implies as desired.
To complete the first claim of the proof, now suppose and . Since μe is injective on , there is a unique y ∈ X(N) with μe(y) = x. By Definition 2.2,
Since the target point , the map μe is injective on , and therefore by Theorem 5.4 (1), we have
implying , which indicates a self-edge at y ∈ STG(N, p) as desired.
Next, we consider the four cases of or .
Case 1 (). The pre-image of x is exactly two states {y1, y2} = (μe)−1(x) with
Since u ⊸ v is input inessential, . For w ≠ v, if w ∈ T(u; N), if and only if so that the inputs Bw(y1; N) = Bw(y2; N). Consequently . Since this holds for all nodes, . We also have
so that either for both i = 1, 2, or for both i = 1, 2. This shows exactly one of y1 → y2, y2 → y2 ∈ STG(N, p) or y2 → y1, y1 → y1 ∈ STG(N, p) holds.
Case 2 ( and ). There is a unique y with μe(y) = x. Let w be the unique node with where η ∈ {±1}. Then by Theorem 5.4 (1) and Definition 2.2, the Equation (17) holds. Using Equation (16) this implies that so there is an edge with and thus .
Case 3 ( and ). Let w be the unique node with where η ∈ {±1}. Note that we must have w ≠ u (see Figure 3). The pre-image of x and each consist of two states, {y1, y2} = (μe)−1(x) and with
Then, for both i = 1, 2, we have
Using Equation 15 applied to w ≠ u we have so that .
Case 4 ( and ). There is a unique with and two states with μe(yi) = x. Let η ∈ {±1} such that . For both i = 1, 2, we have
Let be the state defined by
Equation (18) together with Equation (16) implies that . For one choice of i, say i = 1, so that . On the other hand, and . Set , y: = y2, and y′ = y1. Noting that and for w ≠ u, we have (see Figure 3). □
Theorem 5.4 (3) is obtained from Proposition 6.1 as follows. When the Morse graph has an FP at state , then there is unique y with which is an FP in MG(p, N). On the other hand, if , then Case 1 of Proposition 6.1 shows that there is a FP y in MG(p, N) with .
7 Output inessential parameters
7.1 The projection map Φ preserves dynamics
In this section, we begin the proof of Theorem 5.5 with the proof of point (1). Recall that an assumption of the theorem is that the -cut is composed entirely of output inessential edges, some of which may also be input inessential. The following definition identifies the attracting region X(OFF,ON) ⊂ X(N), which will turn out to be isomorphic to .
Definition 7.1. Let and . The (OFF,ON)-attractor of the STG X(N) is the subset X(OFF,ON) ⊂ X(N) given by
where for each network node u ∈ V
using Equation (9).
Note that X(OFF,ON) consists of the set of contiguous states x such that the value of for all edges e:u ⊸ v with e ∈ OFF and the value of for all edges e:u ⊸ w with e ∈ ON (see Figure 4). Note that in the Figure 4, the edge u ⊸ v corresponding to the smallest threshold θu(v) = 1 of u belongs to ON, while the two edges that correspond to largest two thresholds belong to OFF. As a result, the values of the multi-valued function gu and the target point map lie within the u-projection of the outlined area Xu(OFF,ON). A similar argument for the v-direction implies that all components of lie in Xv(OFF,ON). Therefore, the asynchronous dynamics of is attracted to X(OFF,ON), as indicated by the arrows.
As suggested by the name, for , the (OFF,ON)-attractor is a global attractor of the multi-level dynamics. The next proposition proves this by showing that the image of the target point map is contained in X(OFF,ON). As a consequence, all recurrent dynamics of are contained in X(OFF,ON). We will make use of the input map Bu:X → BS(u) introduced at the beginning of Section 2.3.
Proposition 7.2. Let and . Then for all x ∈ X(N), .
Proof. Let u ∈ V and p = (f, θ). For each v ∈ T(u;ON), we have . Consequently, for any state x ∈ X,
For each v ∈ T(u;OFF), we have since u ⊸ v is output-off inessential at p. Consequently, for any state x ∈ X,
Since u was arbitrary, this proves the proposition. □
The idea of the proof of Theorem 5.5 (1) is to show that for the parameters in the target points of the (OFF,ON)-attractor are the same as the target points of the cut network after relabeling. An immediate consequence is that the STG for is graph isomorphic to the STG of the (OFF,ON)-attractor (Figure 4). We proceed to define the relabeling map ρOFF,ON, which appears in the commutative diagram (Equation 8).
Definition 7.3. The relabeling map is
We now show that the value of the input map for N at x agrees with the value of the input map for at ρOFF,ON(x).
Lemma 7.4. Let , , and (g, ϕ) = Φ((f, θ);OFF,ON) be the (OFF,ON)-projection of (f, θ). For each state x ∈ X(OFF,ON), u ∈ V, and w ∈ S(u; N)
where we suppressed the dependency from Equation (12).
Proof. Let x ∈ X(OFF,ON). First suppose . If w ⊸ u ∈ ON, then implies by Equation (7) that θw(u) ≤ |T(w;ON)| ≤ xw. Consequently, by the definition of and ,
If w ⊸ u ∈ OFF, then implies θw(u) > |T(w)|−|T(w;OFF)| ≥ xw. Consequently, by the definition of and ,
This completes the proof for the case .
Now consider an edge . Since , Equation (7) is satisfied and the edges in ON are ranked first by θ. This implies #w(u) = |T(w;ON)|. In particular, we have
Since is monotonically increasing, we have xw < θw(u) if and only if . Since the sign of w ⊸ u in N is the same as the sign of w ⊸ u in , the lemma holds in the case . □
We are now ready to prove the main result of this subsection.
Proof of Theorem 5.5 (1). Let and q = (g, ϕ) = Φ(p;OFF,ON). To simplify notation, let ρ = ρOFF,ON and . Let x ∈ X(OFF,ON). We need to show that
First note that by Lemma 7.4 and the definition of g, we have
for each v ∈ T(u; M). Therefore, we have
where the second equality follows from the fact that when v ∈ T(u;ON). This shows that the diagram (Equation 8) commutes so that the target point maps are conjugate.
Since the target point maps are conjugate and the asynchronous dynamics are completely determined by the target point maps, we conclude that STG(X(M), q) is isomorphic to STG(X(OFF,ON), p), a subgraph of STG(X(N), p).
□
Finally, we derive consequences of this result for the Morse graphs. Theorem 5.5 (1) implies that the only recurrent set of STG(X(N), p) which does not correspond to a recurrent set of STG(X(M), q) must be outside of the (OFF,ON)-attractor X(OFF,ON). Since X(OFF,ON) is the global attractor, these recurrent sets are represented as unstable Morse nodes in the Morse graph. Moreover, an FC cannot exist outside of X(OFF,ON) since all edges between states which are outside of X(OFF,ON) and adjacent in the u direction point toward X(OFF,ON). This argument proves Theorem 5.5 (2).
7.2 Embeddings of a subnetwork's parameter graph
In this section, we prove Theorem 5.5 (3) and (4) by constructing a collection of right inverses, {Ψ} to each projection Φ, each of which embeds the parameter graph into PG(N) of the original network.
Given a parameter , in order to construct a parameter p = (f, θ): = Ψ(q), we need to first determine the order parameter θ. However, the construction of θ requires a choice of an ordering for the edges that have been cut. We therefore let ζOFF ∈ Θ(OFF) and ζON ∈ Θ(ON) be orderings of the sets OFF and ON, respectively. Let be the subset of output inessential parameters p = (f, θ) such that the order parameter θ agrees with the orderings given by ζOFF and ζON:
We next discuss how to construct a logic parameter for p = (f, θ) = Ψ((g, ϕ)).
We start by listing conditions we impose on map Ψ in order for it be the right inverse of Φ and to preserve parameter graph adjacency. Let and , that is, b1 is an input vector with entries corresponding to the edges that exist in both networks and b2 is an input with entries for edges that exist only in N and are being cut.
1. requires each edge in to be output inessential: for each input b,
2. Whenever u ⊸ v is an edge in both N and , (recalling the definition of β from Equation 12) we will set
Condition (Equation 20) is necessary for f to map to g under Φ, that is, for Ψ to be a right inverse of Φ. As we explain below, condition (Equation 21) is necessary for Ψ to preserve parameter graph adjacency.
3. For each logic parameter , the logic parameter f = Ψ(g) that satisfies (Equations 20, 21) must be an MBF. As an example, consider g to be the parameter for which each edge in is output-off inessential
Then, this implies since . On the other hand, taking g to be the parameter for which each edge in is output-on inessential
implies since .
To see that the condition (Equation 21) is necessary for Ψ to preserve parameter graph adjacency, let be logically adjacent. We wish for the corresponding logic parameter f = Ψ((g, ϕ)) and to be logically adjacent. Since the values of and will need to inherit the logical adjacency of g and , there will be a unique b1 and unique i such that . For f and to be adjacent, this needs to be the only difference. Therefore, we need to require that for b2 ≠ βu, , implying that must be independent of g.
In general, there are many embeddings of into PG(N; ζOFF, ζON) because the values of are unconstrained by g. Assuming each embedding is mutually disjoint (which we will prove in Proposition 7.7), an embedding is uniquely specified by identifying the image of a single logic parameter . We say the image of ĝ, denoted , anchors the embedding; we call an anchoring logic, and ĝ the anchor type. The anchor type ĝ is arbitrary, but for concreteness we will choose to be the logic parameter at which every edge is output-off inessential:
Because the anchoring logic must satisfy constraints (1)–(3), the only unconstrained values of are at inputs (b1, b2) where b2 is incomparable to βu.
Definition 7.5. Given the anchor type (Equation 22) and a disjoint union , the set of anchoring logics is the set of logic parameters satisfying
for each .
The first condition in each line of Equation 23 is required by constraint (1). The definition in the cases b2 ≺ βu and b2 ≻ βu is required by constraint (3). The case b2 = βu is a consequence of our choice of anchor type, ĝ.
Given an anchoring logic , let be the set of parameters (f, θ) such that θ satisfies (Equation 19) and f satisfies
We define
where (f, θ): = Ψ((g, ϕ)), and for each node u, (fu, θu) is defined as follows.
• The u-order parameter θu is defined so that the edges in ON are ranked first by θu and ordered according to . The edges in OFF are ranked last by θu and ordered according to . The remaining edges are between the edges in the set ON and the edges in the set OFF and ordered according to ϕu. Explicitly,
• The u-logic parameter fu is defined so that the edges in OFF and ON are output-off and output-on inessential, respectively, and by Equations (20, 24). This can be summarized by
We illustrate our construction of Ψ in Figure 5 for a factor graph with two sources and one target. See the caption for a detailed description.
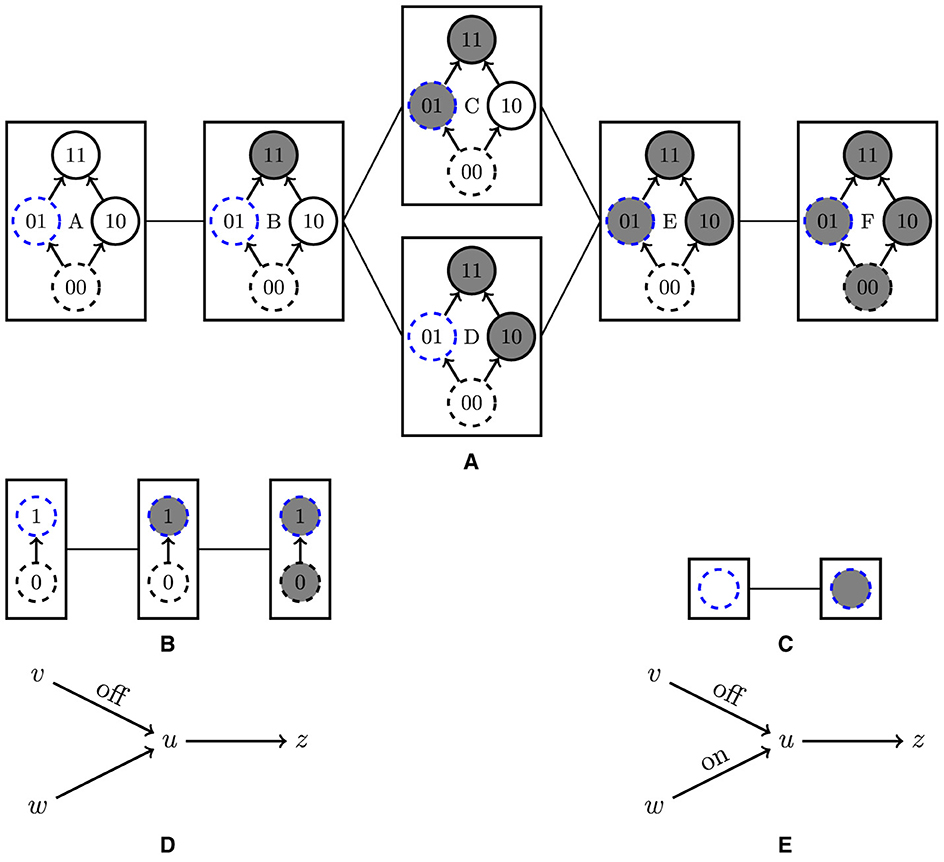
Figure 5. Embedding of factor graphs. (A) The u-factor graph for a node u with two sources and one target as pictured in (D, E). Each u-parameter is represented by a rectangle. Inside each rectangle is the Boolean lattice BS(u) with each circle containing an input b = bvbw. Empty (filled) circles indicate inputs where the value of the logic parameter (). The projection Φ(p; {v → u}, ∅) is determined by the values of on the dashed circles since in the first component of the input. The projection Φ(p; {v → u}, {w → u}) is determined by the values on the blue circles, since based on the selection of OFF = {v → u},ON = {w → u}. The capital letters label each parameter for reference. (B) The u-factor graph after cutting the edge v → u. Using parameter D in (A) as the anchoring logic, setting OFF = {v → u} and ON = ∅, Ψ maps this factor graph isomorphically to the subgraph given by parameters D-E-F in (A). (C) The u-factor graph after cutting both v → u and w → u. Using parameter D in (a) as the anchoring logic, setting OFF = {v → u} and ON = {w → u}, Ψ maps this factor graph isomorphically to the subgraph D-E in (A). Using parameter B in (A) as the anchoring logic, Ψ maps this factor graph ismorphically to the subgraph B-C in (A). (D, E) The edges are labeled “off” or “on” according to the choice of OFF and ON in the descriptions of (B, C), respectively.
Our first result on Ψ is that the constraints on the set of anchoring logics are sufficient for Ψ to be well defined. That is, we verify that any function f defined by Equations (20, 24) is a valid logic parameter.
Proposition 7.6. For any choice of anchoring logic and , so that Ψ is well defined.
Proof. Let q = (g, ϕ) and . First, we show that is an MBF for each u and i. For , the function is constant and therefore trivially an MBF.
Let . Let b = (b1, b2) and c = (c1, c2) be elements of with b ≺ c.
• If b2 = βu = c2 then b ≺ c implies b1 ≺ c1. Since is an MBF and f satisfies (Equation 20),
• If both b2 ≠ βu and c2 ≠ βu then, since the anchoring logic is an MBF and f satisfies (Equation 24),
• Let b2 = βu and c2 ≠ βu. Then b2 ≺ c2 implies βu ≺ c2 so that . Therefore,
• Similarly, if b2 ≠ βu and c2 = βu, then b2 ≺ c2 implies b2 ≺ βu so that . Therefore,
This shows that is an MBF.
Next, we show that fu satisfies the ordering condition (Equation 1). Since the anchoring logic satisfies the ordering condition, when b2 ≠ βu
and the ordering condition for fu is satisfied. Suppose b2 = βu. Then
Since gu satisfies the ordering condition, this implies fu satisfies the ordering condition at (b1, b2).
It is straightforward to check that θ satisfies (Equation 19). Since we have shown that f is a valid logic parameter and f satisfies (Equation 24 by definition, . □
We next establish that the collection of co-domains of the collection of maps , are disjoint. The fact that distinct choices of ζOFF or ζON produce distinct sets of order parameters Θ(N; ζOFF, ζON) follows directly from Equation 19.
Proposition 7.7. 1. The set of anchoring logics is non-empty.
2. If are distinct anchoring logics then and are disjoint sets.
Proof. (1) It is straightforward to check that defined by
is a valid anchoring logic in .
(2) Suppose and ĥ are distinct anchoring logics. Then, there is a node u and index i such that the values of and differ on an input (b1, b2). Since and ĥ both satisfy (Equation 23), we must have that b2 and βu are incomparable, and hence b2 ≠ βu. Let and . Since b2 ≠ βu and f and h satisfy (Equations 21, 26), we have and . This shows
so that f ≠ h. Since f and h are arbitrary, the statement holds. □
We are now ready to prove Theorem 5.5 (3) which states that Ψ is a right inverse of Φ. It is implied immediately from the following theorem which also identifies as the image of Ψ.
Theorem 7.8. Fix ζOFF ∈ Θ(OFF), ζON ∈ Θ(ON), and an anchoring logic . The map is the inverse of Φ(·;OFF,ON) restricted to .
Proof. First, we show that Ψ is a right inverse of Φ. Let and . We wish to show that Φ ∘ Ψ(q) = q.
Let . First, we verify that . Let u ∈ V be a network node and . By Equation (25),
By Equation (11) in the definition of Φ,
Since θu orders the edges in ON first and the edges in OFF last, for all w ∈ |T(u;ON)|, θu(w) < θu(v) and for all w ∈ T(u;OFF), θu(w) > θu(v). In particular, #u(v) = |T(u;ON)| so that
This holds for each u and , that is, each node v in the domain of ϕu, so .
Next, we verify that . For a node u ∈ V, , and an input
where the first equality follows from Equation (13) and the second equality follows from Equation (26). Since u and b were arbitrary, and was an arbitrary target node of u in , we must have .
Having shown Ψ is a right inverse, we now show that Ψ is a left inverse when Φ is restricted to . Let , q = (g, ϕ) = Φ(p;OFF,ON), and . We wish to show that Ψ ∘ Φ(p) = p.
First, we show that . For , we have
because #u(v) = |T(u;ON)|. For v ∈ T(u;ON),
because by definition of the order parameter θ satisfies (Equation 19) and therefore . Similarly, for v ∈ T(u;OFF),
because by definition θ orders the edges in OFF last and according to ζOFF. This covers all types of target nodes v of u. Since u was arbitrary, .
Next, we show that . For , since satisfies (Equation 24) and f satisfies (Equation 26), we have
Now consider . Let and . For b2 = βu, we have
where the first equality follows from Equation 26. For b2 ≠ βu, we have
where the first equality follows from Equation 24, the definition of Ψ. The second equality follows from the definition of . This completes the proof that .
Since , we have that Ψ is a left inverse of the restricted Φ. Since Ψ is both a left and right inverse, Ψ is the inverse of the restricted Φ. □
Finally, we prove Theorem 5.5 (4) which states that Ψ is a graph embedding of into PG(N;OFF,ON).
Proof of Theorem 5.5 (4). Fix orderings ζOFF, ζON, and anchoring logic . We will show that maps isomorphically into . Since Theorem 7.8 shows that Ψ is invertible, it only remains to show that Ψ preserves parameter adjacency.
Let q = (g, ϕ) and be adjacent in . Let p = (f, θ) = Ψ(q) and . Let u be the unique node such that qu and are adjacent in the u-factor graph. Since Ψ is defined component-wise, for each w ≠ u, .
To see that pu and are adjacent, first suppose qu and are order adjacent. Let π be the transposition of adjacent integers so that . Then, the adjacent transposition τ of {1, …, T(u; N)} is defined by
satisfies . Moreover, since , it follows that . This shows that pu and are order adjacent.
Next, suppose qu and are logically adjacent. Since we have . Let i be the unique index and be the unique input such that . Let . Then, by Equation 26, we have
On the other hand, for b1 ≠ b, because g and are adjacent logic parameters in . Therefore,
On the input (b1, b2 ≠ βu), the value of fu and is determined by the reference logic and thus they agree:
That is, (b, βu) is the unique input so that .
Next we show that for w ∈ T(u; N)\{v}, . If then because gu and differ only at component i = ϕu(v). Therefore for such a w
and for ,
On the other hand, if then
We conclude that θu(v) is the unique index such that . That is, pu and are logically adjacent.
Since Ψ is invertible and adjacency of q and implies adjacency of p and , we conclude Ψ is an isomorphism. □
8 Algebraic properties of the projection maps
Theorem 8.1. (a) Let , where and . The V-dual parameter map DV commutes with the projection map Φ(·;OFF,ON) when the identities of OFF and ON edges are exchanged:
(b) Let . The V-dual parameter map DV commutes with the projection map Φin(·;e):
Proof. (a) Let . Let
We will show that .
First, we show that . Recall (see Equation 10) that we defined the number of out-edges of u with rank less than θu(v)
where we now explicitly include the dependency on the parameter p = (f, θ). From Equation 4, 11, for each we have
We therefore need to show that
Note that is the number of cut edges which have source u. To compute , let be the order parameter for DV(p) and mu = |T(u; N)|. We have
as desired.
Now we show . Let . By Equation 13, for each
Since ,
where in the first equality, we have used . Let . By Equation 4,
Since , we have
We have already shown that . By inspecting the definition of βu in Equation 12, it is also clear that . Comparing the expressions for g in Equation 27 and in Equation 28, we conclude that . This proves first part of the Theorem.
To prove the second part, we note that the only difference between Φ and Φin is that in the definition of logic parameter g, the input from the cut edge e is replaced by arbitrary value β, rather than a specific value that depend on whether the cut edge belongs to ON and OFF. Therefore, this construction proves also the second statement. □
Since the projection map Φ and the V-dual parameter map commute, it is natural to expect that the corresponding maps between STGs, ρOFF,ON, , and λV commute as well. In the following two propositions, we show that this is indeed the case.
The first proposition relates attractors (see 7.1) in the STG of the full network N and the STG of the cut network under the map λV.
Proposition 8.2. Let . The following diagram commutes
Proof. First, we prove that image of under λV(·;N) is . Let . For each node u ∈ V, implies
Since ,
and therefore . This holds for each u which implies .
Next, we show
Since λV is an involution and ρ is invertible, this will prove the proposition. Let and u ∈ V. We have
On the other hand,
Since u was arbitrary, the statement (Equation 29) holds, which finishes the proof of the proposition.
□
The second proposition relates the surjective map μe(N), used in relating state transition graphs for input inessential parameters in Theorem 5.4, and the map λV.
Proposition 8.3. Let and (f′, θ′) = DV(p) be the V-dual parameter of p. Let e = u ⊸ v be an edge. The following diagram commutes
Proof. We will prove
Since λV is an involution, this will prove the proposition.
Let M = Ce(N). For w ≠ u, is the identity. Furthermore, since Xw(M) = Xw(N). Since is its own inverse, this shows
Now consider the u component and let x ∈ X. We have
where the last line follows from
□
Finally, we prove that projections commute and that successive projections are equivalent to projecting every edge simultaneously.
Proposition 8.4. The projection map Φ satisfies the following properties.
1. Φ(·;∅, {e2}) ∘ Φ(·;{e1}, ∅) = Φ(·;{e1}, {e2}) = Φ(·;{e1}, ∅) ∘ Φ(·;∅, {e2}).
2. Φ(·;{e1}, ∅) ∘ Φ(·;{e2}, ∅) = Φ(·;{e1, e2}, ∅) = Φ(·;{e2}, ∅) ∘ Φ(·;{e1}, ∅).
3. Φ(·;∅, {e1}) ∘ Φ(·;∅, {e2}) = Φ(·;∅, {e1, e2}) = Φ(·;∅, {e2}) ∘ Φ(·;∅, {e1}).
The projection map Φin satisfies
Finally,
Proof. (1): We first show that
Let , q = (g, ϕ) = Φ(p; {e1}, {e2}), and
We will show that .
First, we show that . Recall from Equation 10 that
where we now explicitly include the dependencies on the parameter p = (f, θ) and the edges . Let . By Equation 11,
To prove , we need to show that
Applying Equation 11 to and using the definition of #u, we have
Since counts the number of edges θu below u ⊸ v, we have
We therefore conclude .
Next, we show that . Applying Equation 13,
Since we have shown and is clear from the definition of β, . This completes the proof of the first equality in (1).
To show the second equality, we apply Theorem 8.1 and the fact that DV is an involution to the first equality:
Both equalities in (2) follow from a similar argument for the first equality in (1). Statement (3) follows from applying Theorem 8.1 to (2). Statement (4) follows from statement (3) and a realization that the only difference between Φ and Φin is independence of the latter on division of cut edges into ON and OFF. Similar argument implies that statements (5) and (6) follow from (1) and (2).
□
9 Network example
We describe the embeddings of the parameter graph of negative feedback loop PG(NL) and parameter graph of the positive loop PG(PL) into parameter graph PG(N) of the network N in Figure 1A. Theorem 5.5 requires that the edges that are cut from N to arrive at a subgraph NL, or PL, are output inessential.
We first consider the negative loop which requires that we cut the edge e: = z → y from N and therefore . There are two choices for edge e to be output inessential: this edge can be always ON and thus output-on inessential, or always OFF, and hence output-off inessential. Cutting this edge produces network Ce(N) = NL which consists of negative loop z → x ⊣ y → z. Since each node in this loop has one input edge and one output edge, the parameter graph PG(NL) is a product of three copies of factor graph PG(x) with 27 elements
There are two embeddings: If e is output-on inessential there is an embedding , and when e is output-off inessential, there is an . These are illustrated in Figure 1 and further explained below.
Checking the Table 3, the edge e is always ON in parameters that 7, 8, and 10 while always OFF in parameters 3, 5, and 6. Looking now at Table 2, the input from z being ON corresponds to first and third rows of the truth table, where the input from x determines the value of the MBF. The nodes I, II, and IV parameterize possible behaviors of the input edge x ⊣ y. Similarly, considering Table 2, input z being OFF corresponds to second and fourth rows of the truth table. In this case, the nodes IV, V, and VI parameterize possible behaviors of the input edge x ⊣ y.
Therefore, the embedding Ψ1(PG(NL)) is
The embedding Ψ2(PG(NL)) is
Note that the fact that these embeddings intersect does not contradict Theorem 7.7, since both of these embeddings have a single anchor logic.
We also note that the oscillatory behavior in the PG(NL) is supported by its central node. This node embeds into
We conclude that these two nodes in PG(N) support oscillatory behavior.
The embedding of PG(PL) into PG(N) requires that the edges eyx:x ⊣ y and exz:z → x are output inessential. The first condition corresponds to node A, when x ⊣ y is output-off inessential, and to node C when x ⊣ y is output-on inessential. The edge z → x is output-on inessential at nodes 1, 2, and 3 and output-off inessential at nodes 10, 11, and 12. Therefore, there are four embeddings given by combinations of labels ON and OFF on edges eyx, exz. Evaluating the MBF at node y in Table 2 on the appropriate constant input from x as above, we obtain disjoint embeddings of PG(PL) into PG(N):
We note that the bistable behavior in the PG(PL) is only supported by its central node. This node embeds into
We conclude that these four nodes in PG(N) support bistable behavior.
So far, we only considered cutting of output inessential edges which results in the embedding of the entire parameter graph. We now consider parameters at which the edges that are being cut are input inessential.
9.1 Input inessential parameters
We now describe input inessential parameters (u, v, w) ∈ PG(x) × PG(y) × PG(z) (see Figure 1) which support the dynamics of the negative loop NL. Such parameters must satisfy two properties:
1. support essential edges forming the negative feedback loop NL; and
2. the edge z → y must be input inessential at y.
To satisfy the first condition, the only choice in PG(x) is B since choices A and C would disconnect the loop at the network node x. In PG(y), the only option is node III where the edge z → y is input essential. At node z to satisfy the first condition, we can choose from nodes 4, 5, 8, and 9. Apart from essential nodes 4 and 9, at parameter nodes 5 and 8 the edge z → x that participates in the negative loop is output essential.
Therefore at 4 parameters
Theorem 5.4 applies. There is a semi-conjugacy of the dynamics on the state transition graph, and therefore, these parameters support oscillations generated by the negative feedback loop.
Similar arguments show that all parameters where at least one of the edges eyx and exz is input inessential, but the bistable loop is essential, will exhibit bistable dynamics.
We first consider the first condition that eyx is input inessential. This does not affect the choice of parameter in PG(x), so all three nodes are acceptable. In PG(y), the only MBF where eyx is input inessential, eyz is input essential, and where the edge ezy is output essential is the function IV. In PG(z), the nodes where the edge eyz is output essential are {2, 4, 9, 11}. Therefore for parameter combinations
there is a semi-conjugacy of state transition graph dynamics onto dynamics of positive loop PL, which exhibits bistability.
The second condition that exz is input inessential is satisfied in PG(x) by functions A and C. At PG(y), three choices II, IV,V make eyz input essential, while choices {2, 4, 9, 11} in PG(z) make the edge eyz output essential. Therefore for parameters
Theorem 5.4 also implies existence of bistability. Both edges eyx and exz are input in-essential on parameters where two collections (Equation 31) and (Equation 32) overlap.
It is now possible to investigate relative positions of parameters that support bistability and those that support oscillations. For instance, parameter (B, II, 5) supports oscillation (see Equation 30) and parameter (C, II, 4) supports bistability (see Equation 32). These parameters are not neighbors in the parameter space, but a simultaneous lowering of activation threshold of x ⊣ y and lowering of activation threshold of z → y, changes the dynamic behavior of the network N.
10 Discussion
In this article, we study a question of the relationship between network structure and its dynamics. In the DSGRN approach, the parameter space of switching ODE systems compatible with the network structure is first decomposed into a finite number of domains that correspond to multi-level Boolean systems [7] and then organized into a finite parameter graph. This supports a description of the dynamics by finite state transition graphs and allows us to formulate our question precisely. Because the finitness of this description avoids algorithmically difficult questions of existence of smooth conjugacies, this framework provides a tractable way to address this question. The price we pay is that the description of the dynamics is by necessity approximate and only captures features of the dynamics that are stable under parameter perturbations.
DSGRN analysis is in some sense complementary to the analysis of equations of mass action kinetics. Enzymatic chemical reactions in cellular biology are often modeled by saturating Hill functions. While DSGRN follows a switching system approximation of Hill functions by piecewise constant functions, thus emphasizing the saturating behavior of the Hill functions, the mass action polynomial approximation emphasizes the non-saturated part of the Hill function. General lack of experimentally determined values of parameters requires the development of combinatorial, often graph based, approaches for both types of approximations [55–58].
The main result of the study describes how dynamics of a subnetwork manifests itself in the dynamics of a larger network. In systems biology, the concept of a network is central to understanding the function of a cell and its responses to the environment. Unfortunately, the networks studied by biologists are always incomplete, uncertain, and the parameters mostly unmeasurable. Yet the need for predictive models is very high. The results presented here suggest that the DSGRN approach can provide precise understanding of whether or not a network can produce distinct phenotypes (i.e., normal vs. cancer) and how robust are such predictions under network embedding, provided that the expectations imposed on predictive modeling are properly adjusted, that is, there is no expectation that our approach can reproduce precise time series trajectories of multiple genes.
A popular link between structure and function has been proposed in the theory of motifs [39–41]. In this approach, a search over large databases of regulatory networks revealed statistically significant over-representation of certain 3-4 node subnetworks, called motifs. The hypothesis, supported by simple models and a compelling narrative, is that these motifs are over-represented because they serve a particular cellular function. However, there is limited evidence that these small subnetworks consistently work in the same way within the larger networks as they do in isolation.
Our present study provides some answer to these questions. We show that the dynamics of the subnetwork can be always found in the dynamics of the larger network, provided that it is “uncovered” by setting parameters of the additional edges of the larger network to be constitutively ON or OFF. As such, the larger network is always capable of reproducing dynamics of each of its subnetworks for an appropriate choice of parameters.
Another important conjecture in systems biology asserts that the reason why we observe large networks exhibiting dynamics that smaller networks can produce on their own (say oscillations) is that redundancy enhances robustness of the phenotype. Our observation that the parameter graph PG(M) of the subnetwork M is embedded in multiple copies in the parameter graph PG(N) of network N supports this assertion. We did not directly study the mutual position of these embedded subgraphs within the larger graph beyond showing they are disjoint. The robustness argument would be strengthened if these subgraphs lie close to each other in such a way that perturbation of a node in one may lead to a node in the other embedding with the same dynamics.
We believe that the proposed framework of DSGRN to study the relationship between network structure and its function (i.e., dynamics) will provide many important insights in systems biology.
Data availability statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Author contributions
WD: Writing – original draft, Visualization, Investigation, Formal analysis. BC: Writing – review & editing. TG: Writing – review & editing, Supervision, Conceptualization.
Funding
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. This research was partially supported by NIH 5R01GM126555-01.
Conflict of interest
WD was employed by Immunetrics.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The author(s) declared that they were an editorial board member of Frontiers, at the time of submission. This had no impact on the peer review process and the final decision.
Publisher's note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
1. Katok A, Hasselblatt B. Introduction to Modern Theory of Dynamical Systems. Cambridge: Cambridge University Press. (1995). doi: 10.1017/CBO9780511809187
2. Newhouse S. The abundance of wild hyperbolic sets and non-smooth stable sets for diffeomorphisms. Publ Math IHES. (1979) 50:101–51. doi: 10.1007/BF02684771
3. Cummins B, Gedeon T, Harker S, Mischaikow K, Mok K. Combinatorial representation of parameter space for switching systems. SIAM J Appl Dyn Syst. (2016) 15:2176–212. doi: 10.1137/15M1052743
4. Cummins B, Gedeon T, Harker S, Mischaikow K. Database of dynamic signatures generated by regulatory networks (DSGRN). In: Koeppl JFH, , editor. Computational Methods in Systems Biology - 2017. Cham: Springer (2017). p. 300–308. doi: 10.1007/978-3-319-67471-1_19
5. Gedeon T, Cummins B, Harker S, Mischaikow K. Identifying robust hysteresis in networks. PLoS Comput Bio. (2018) 14:e1006121. doi: 10.1371/journal.pcbi.1006121
6. Gedeon T. Multi-parameter exploration of dynamics of regulatory networks. Biosystems. (2020) 190:104113. doi: 10.1016/j.biosystems.2020.104113
7. Crawford-Kahrl P, Cummins B, Gedeon T. Joint realizability of monotone boolean functions. J Theor Comp Sci. (2022) 922:447–74. doi: 10.1016/j.tcs.2022.04.045
8. Glass L, Kauffman S. Co-operative components, spatial localization and oscillatory cellular dynamics. J Theoret Biol. (1972) 34:219–37. doi: 10.1016/0022-5193(72)90157-9
9. Glass L, Kauffman S. The logical analysis of continuous, non-linear biochemical control networks. J Theoret Biol. (1973) 39:103–29. doi: 10.1016/0022-5193(73)90208-7
10. Thomas R. Regulatory networks seen as asynchronous automata: a logical description. J Theor Biol. (1991) 153:1–23. doi: 10.1016/S0022-5193(05)80350-9
11. Snoussi EH. Qualitative dynamics of piecewise-linear differential equations: a discrete mapping approach. Dyn Stab Syst. (1989) 4:565–83. doi: 10.1080/02681118908806072
12. de Jong H, Gouze J, Hernandez C, Page M, Sari T, Geiselmann J. Qualitative simulation of genetic regulatory networks using piecewise-linear models. Bull Math Biol. (2004) 66:301–40. doi: 10.1016/j.bulm.2003.08.010
13. Tournier L, Chaves M. Uncovering operational interactions in genetic networks using asynchronous Boolean dynamics. J Theor Biol. (2009) 260:196–209. doi: 10.1016/j.jtbi.2009.06.006
14. Gouzé JL. Positive and negative circuits in dynamical systems. J Biol Syst. (1998) 6:11–15. doi: 10.1142/S0218339098000054
15. Ironi L, Panzeri L, Plahte E, Simoncini V. Dynamics of actively regulated gene networks. Physica D. (2011) 240:779–794. doi: 10.1016/j.physd.2010.12.010
16. Edwards R, Machina a, McGregor G, van den Driessche P. A modelling framework for gene regulatory networks including transcription and translation. Bull Mathem Biol. (2015) 77:953–983. doi: 10.1007/s11538-015-0073-9
17. Gedeon T, Harker S, Kokubu H, Mischaikow K, Oka H. Global dynamics for steep sigmoidal nonlinearities in two dimensions. Physica D. (2017) 339:18–38. doi: 10.1016/j.physd.2016.08.006
18. Duncan W, Gedeon T, Kokubu H, Oka H, Mischaikow K. Equilibria and their stability in networks with steep sigmoidal nonlinearities. J Appl Dyn Syst. (2021) 20:2108–41. doi: 10.1137/21M1398331
19. Duncan W, Gedeon T. Stability and bifurcations of equilibria in networks with piecewise linear interactions. Inter J Bif Chaos. (2021) 31:2130032. doi: 10.1142/S0218127421300329
20. Abou-Jaoudé W, Monteiro P. On logical bifurcation diagrams. J Theor Biol. (2019) 466:39–63. doi: 10.1016/j.jtbi.2019.01.008
21. Zaslavsky T. Signed graphs. Discr Appl Mathem. (1982) 4:47–74. doi: 10.1016/0166-218X(82)90033-6
22. Smith H. Monotone Dynamical Systems, An Introduction to the Theory of Competitive and Cooperative Systems. Providence, RI: American Mathematical Society. (1995).
23. Gedeon T, Mischaikow K. Structure of the global attractor of cyclic feedback systems. J Dyn Diff Eq. (1995) 7:141–90. doi: 10.1007/BF02218817
24. Gedeon T. Cyclic Feedback Systems. Providence, RI: American Mathematical Society (1998). doi: 10.1090/memo/0637
25. Naserasr R, Rollová E, Sopena É. Homomorphisms of signed graphs. J Graph Theory. (2015) 79:178–212. doi: 10.1002/jgt.21817
26. Aracena J, Richard A, Salinas L. Number of fixed points and disjoint cycles in monotone Boolean networks. SIAM J Discr Mathem. (2017) 31:1702–25. doi: 10.1137/16M1060868
27. Naserasr R, Sopena E, Zaslavsky T. Homomorphisms of signed graphs: an update. Eur J Combinat. (2021) 91:103222. doi: 10.1016/j.ejc.2020.103222
28. Atay O, Doncic A, Skotheim J. Switch-like transitions insulate network motifs to modularize biological networks. Cell Syst. (2016) 3:121–32. doi: 10.1016/j.cels.2016.06.010
29. Hartwell LH, Weinert TA. Checkpoints: controls that ensure the order of cell cycle events. Science. (1989) 246:629–34. doi: 10.1126/science.2683079
30. Murray AW, Kirschner MW. Dominoes and clocks: the union of two views of the cell cycle. Science. (1989) 246:614–21. doi: 10.1126/science.2683077
31. Orlando D, Lin C, Bernard A, Wang J, Socolar J, Iversen E, et al. Global control of cell-cycle transcription by coupled CDK and network oscillators. Nature. (2008) 453:944–7. doi: 10.1038/nature06955
32. Skotheim JM, Di Talia S, Siggia E, Cross FR. Positive feedback of G1 cyclins ensures coherent cell cycle entry. Nature. (2008) (454):291–6. doi: 10.1038/nature07118
33. Yao G, Tan C, West M, Nevins J, You L. Origin of bistability underlying mammalian cell cycle entry. Molec Syst Biol. (2011) 7:485. doi: 10.1038/msb.2011.19
34. Novak B, Tyson J. Mitotic kinase oscillation governs the latching of cell cycle switches. Current Biologt. (2022) 32:1–6. doi: 10.1016/j.cub.2022.04.016
35. Elowitz M, Leibler S, A. synthetic oscillatory network of transcriptional regulators. Nature. (2000) 403:335–8. doi: 10.1038/35002125
36. Gardner T, Cantor C, Collins J. Construction of a genetic toggle switch in Escherichia coli. Nature. (2000) 403:339–42. doi: 10.1038/35002131
37. Manning A, Dyson N. RB mitotic implications of a tumour suppressor. Nat Rev Cancer. (2012) 12:220–6. doi: 10.1038/nrc3216
38. Viatour P, Sage J. Newly identified aspects of tumor suppression by RB. Dis Model Mech. (2011) 4:581–5. doi: 10.1242/dmm.008060
39. Alon U. Network motifs: theory and experimental approaches. Nat Rev Genet. (2007) 8:450–61. doi: 10.1038/nrg2102
41. Milo R, Shen-Orr S, Itzkovitz S, Kashtan N, Chklovskii D, Alon U. Network motifs: Simple building blocks of complex networks. Science. (2002) 298:824–7. doi: 10.1126/science.298.5594.824
42. Thieffry D, Thomas R. Qualitative analysis of gene networks. In: Pacific Symposium on Biocomputing. (1998). p. 77–88.
43. Thomas R. Boolean formalization of genetic control circuits. J Theor Biol. (1973) 42:563–85. doi: 10.1016/0022-5193(73)90247-6
44. Pauleve L, Kolcak J, Chatain T, Haar S. Reconciling qualitative, abstract, and scalable modeling of biological networks. Nat Commun. (2020) 11:4256. doi: 10.1038/s41467-020-18112-5
45. Kolcak J, Safranek D, Haar S, Pauleve L. Parameter space abstraction and unfolding semantics of discrete regulatory networks. Theor Comput Sci. (2019) 765:120–44. doi: 10.1016/j.tcs.2018.03.009
46. Abou-Jaoude W, Thieffry D, Feret J. Formal derivation of qualitative dynamical models from biochemical networks. Biosystems. (2016) (149):70–112. doi: 10.1016/j.biosystems.2016.09.001
47. Albert R, Collins JJ, Glass L. Introduction to Focus Issue: quantitative approaches to genetic networks. Chaos. (2013) 23:025001. doi: 10.1063/1.4810923
48. Saadatpour A, Reka A. Boolean modeling of biological regulatory networks: a methodology tutorial. Methods. (2013) 62:3–12. doi: 10.1016/j.ymeth.2012.10.012
49. Bornholt S. Boolean network models of cellular regulation: prospects and limitations. J R Soc Interface. (2008) 5:134–50. doi: 10.1098/rsif.2008.0132.focus
50. Cury JER, Monteiro PT, Chaouiya C. Partial order on the set of Boolean regulatory functions. arXiv:190107623v1. (2019).
51. Chatain T, Haar S, Pauleve L. Most permissive semantics of Boolean networks. arXiv preprint arXiv:1808.10240. (2018).
52. Bernot G, Casse F, Comet JP, Delaplace F, Muller C, Roux O. Semantics of biological regulatory networks. Electron Notes Theor Comput Sci. (2007) 180:3–14. doi: 10.1016/j.entcs.2004.01.038
53. Brewster RC, Foucaud F, Hell P, Naserasr R. The complexity of signed graph and edge-coloured graph homomorphisms. Discrete Math. (2017) 340:223–35. doi: 10.1016/j.disc.2016.08.005
54. Eiter T, Makino K, Gottlob G. Computational aspects of monotone dualization: a brief survey. Discr Appl Mathem. (2008) 156:2035–49. doi: 10.1016/j.dam.2007.04.017
55. Savageau M, Voit E. Power-law approach to modeling biological systems: I. Theory J Ferment Technol. (1982) 60:221–8.
56. Savageau M. Biochemical systems theory: operational differences among variant representations and their significance. J Theor Biol. (1991) 151:509–30. doi: 10.1016/S0022-5193(05)80367-4
57. Mincheva M, Roussel M. Graph-theoretic methods for the analysis of chemical and biochemical networks. I Multistability and oscillations in ordinary differential equation models. J Math Biol. (2007) 55:61–86. doi: 10.1007/s00285-007-0099-1
Keywords: network, gene regulation, dynamical system (DS), network motif inclusion, Boolean model
Citation: Duncan W, Cummins B and Gedeon T (2024) Subnetwork inclusion and switching of multilevel Boolean networks preserve parameter graph structure and dynamics. Front. Appl. Math. Stat. 10:1286957. doi: 10.3389/fams.2024.1286957
Received: 31 August 2023; Accepted: 15 July 2024;
Published: 09 August 2024.
Edited by:
Felix Sadyrbaev, University of Latvia, LatviaReviewed by:
Yunjiao Wang, Texas Southern University, United StatesPaolo Milazzo, University of Pisa, Italy
Copyright © 2024 Duncan, Cummins and Gedeon. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Tomáš Gedeon, Z2VkZW9uQG1hdGgubW9udGFuYS5lZHU=