 Eshetu B. Derzie
Eshetu B. Derzie Justin B. Munyakazi
Justin B. Munyakazi Tekle G. Dinka
Tekle G. Dinka
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Appl. Math. Stat. , 13 February 2023
Sec. Numerical Analysis and Scientific Computation
Volume 9 - 2023 | https://doi.org/10.3389/fams.2023.1068890
This article is part of the Research Topic Singularly Perturbed Problems: Asymptotic Analysis and Numerical Solutions View all 6 articles
This article focuses on a numerical solution of the singularly perturbed Burgers-Huxley equation. The simultaneous presence of a singular perturbation parameter and the nonlinearity raise the challenge of finding a reliable and efficient numerical solution for this equation via the classical numerical methods. To overcome this challenge, a nonstandard finite difference (NSFD) scheme is developed in the following manner. The time variable is discretized using the backward Euler method. This gives rise to a system of nonlinear ordinary differential equations which are then dealt with using the concept of nonlocal approximation. Through a rigorous error analysis, the proposed scheme has been shown to be parameter-uniform convergent. Simulations conducted on two numerical examples confirm the theoretical result. A comparison with other methods in terms of accuracy and computational cost reveals the superiority of the proposed scheme.
The time-dependent singularly perturbed Burgers-Huxley equation models a large class of physical phenomena such as the interaction between convection effect, reaction mechanism and diffusion transport. In one dimensional space this equation has the form [1, 2]
where
α ≥ 0, β ≥ 0, γ ∈ (0, 1) are real parameters and u0(x), h1(t),and h2(t) are sufficiently smooth prescribed functions. Here, 0 < ε ≪ 1 denotes the perturbation parameter.
The field of numerical methods for singularly perturbed problems has flourished significantly over the last couple of decades. The studies focused on the design and analysis of numerical methods that were parameter-uniformly convergent. In other words, research was mostly motivated by the challenge posed by the presence of the singular perturbation parameter. A vast majority of researchers discussed linear problems. Nonlinear singularly perturbed equations, and in particular Equation (1.1), received little attention from scholars in this research area. Nonlinearity constitutes an another layer of difficulties of singularly perturbed problems.
In general, the solution of the singularly perturbed Burgers-Huxley problem (1.1) with arbitrary initial and boundary conditions (IBCs) cannot be expressed in terms of a finite number of elementary functions [2, 3]. Thus, several scholars seek approximate analytic solutions using different transformation techniques [4–6]. However, these techniques still hold for only some specific parameters and initial boundary conditions. Hence, for general cases, there is a need to develop numerical methods to obtain an approximate solution of the problem.
For the last two decades, various numerical methods have been studied to solve the Burgers-Huxley equations of type (1.1) for ε = 1 and specific IBCs in the framework of NSFD methods. For example, A.R. Appadu et al. [7] developed two novel nonstandard finite difference schemes, and explicit exponential finite difference method and a fully implicit exponential finite difference method.
For the singularly perturbed case, that is when 0 < ε ≪ 1, various parameter-uniformly convergent methods have been developed to solve (1.1) [1, 2, 8, 9]. It is to be noted that all these works used the Newton's quasilinearization to deal with the nonlinearity.
In this article, a nonstandard finite difference method for the singularly perturbed case is proposed. To deal with the nonlinearity, rather than using quasilinearization, for the first time, nonlinear terms are approximated in a nonlocal manner following one of Micken's rules [10]. The resulting method preserves the properties of the continuous solution and provides reliable numerical results. The method is proved to be first order parameter-uniform convergent in time and space.
The rest of this article is structured in the following manner. In the next section, we study a priori estimates of the analytic solution to the problem. Section 3 is about the proposed NSFD method and its parameter-uniform convergence. Section 4 deals with the implementation of the method to confirm the theoretical results and compare with other methods. Section 5 concludes the present work and provides a direction for future work.
Throughout this article, we assume that u0, h1, and h2 are sufficiently smooth functions and that a and b satisfy
Under these assumptions the problem (1.1) has a unique solution which exhibits a boundary layer near x = 1 [1].
In the rest of the paper, C denotes a generic constant independent of the parameters and mesh sizes, and ||.||D denotes the maximum norm over D. For the solution u(x, t) of (1.1), we have the following bounds.
Lemma 2.1. [Uniform stability estimate for continuous problem]
Let u(x, t) be the exact solution of (1.1) on , then
where Di = {(x, t):t = 0, x ∈ [0, 1]}, ∂D = Di∪DL∪DR, DL = {(x, t):x = 0, t ∈ [0, T]}, and DR = {(x, t):x = 1, t ∈ [0, T]}.
Proof: The proof can be seen in [9]. □
Remark 2.2. From our assumption in (2.1) and Lemma 2.1, one can observe that the solution u(x, t) satisfies
This section is dedicated to the construction of a new scheme and to the analysis of its parameter-uniform convergence. The first step is to discretize the solution domain and provide the definition of the NSFD methods given in [11] (a revised version of [10]).
Let M and N be positive integers and be uniform grid discretization of the solution domain such that
and
where h = 1/M and Δt = T/N are spatial and temporal step sizes, respectively.
Definition 3.1. A discrete scheme to determine approximate solutions to the solution u(x, t) of the problem (1.1) is called a NSFD method if at least one of the following conditions is satisfied [10]:
1. The classical denominator h or h2 of the discrete first or second order derivative is replaced by a nonnegative function ψ such that
For example, denominator functions that satisfy the above conditions are
and so on.
2. Nonlinear terms that occur in the differential equation are approximated in a nonlocal way. For example,
and so on.
Definition 3.2. Assume that the solution of (1.1) satisfies some property P. The difference equation of (1.1) in is called (qualitatively) stable with respect to P if, for any values of the mesh sizes Δt and h, solution of the difference equation replicates the property P.
Remark 3.3. In [10], Mickens set five rules for the constructions of the finite difference models that can replicate the properties of the exact solution. Definition 3.1 satisfies only two of these rules.
The remaining rules are expressed in terms of definition 3.2. For example, the schemes under consideration in this paper is qualitatively stable with respect to the order of the differential equation, they do satisfy positivity and uniform boundedness.
To construct the scheme, first we semidiscretize the problem (1.1) in time direction and then in space direction.
Denote un(x) as the approximation of u(x, tn) at time level tn, 0 ≤ n ≤ N. Now, we apply backward Euler finite difference method to discretize the continuous problem (1.1) in the temporal direction and obtain the following semidiscrete scheme:
where
Here the nonlinearity a(u)ux and b(u)u approximated in a nonlocal way as
and thus this approximation satisfies the condition (2) in definition 3.1.
The local truncation error en+1 of the semidiscrete scheme (3.3) is given by , where ûn+1(x) is the solution of
That is, ûn+1(x) is the solution obtained after one step of semidiscrete scheme (3.3) by taking the exact value u(x, tn) instead of un(x) as the starting data.
In order to analyze the uniform convergence of the solution un(x) of (3.3) to the exact solution u(x, tn), we will perform the stability analysis and establish the consistency result. First, let us consider the semidiscrete maximum principle for the operator .
Lemma 3.4. Let Φn+1(x) be a function such that Φn+1(0) ≥ 0, Φn+1(1) ≥ 0 and for all x ∈ Ω. Then Φn+1(x) ≥ 0 for all .
Proof: Suppose there is such that From the given hypothesis and second derivative test, we have and . Then, from (3.3) we have
Assumption (2.1) leads to , which contradicts the given assumption in Lemma 3.4 and thus Φn+1(x) ≥ 0 for all . □
This maximum principle leads to the following stability result
Lemma 3.5. (Local error estimate)
Estimate of the local error en+1 is given by
Proof: See [2]. □
The global error En+1 associated to the semidiscrete scheme (3.3) at (n+1)-th time level is given by . Using the local error estimate (Lemma 3.5) and triangular inequality the following global error estimate follows.
Theorem 3.6. (Global error estimate)
The global error En+1 of the time discretisation at the n + 1 time step satisfies
Therefore, the semidiscrete scheme (3.3) is a first order uniformly convergent in the time direction.
The following lemma provides the asymptotic estimates of the exact solution un+1 of (3.3) and its derivatives. These estimates will be used in the convergence analysis of the fully discrete scheme
Lemma 3.7. If un+1(x) is the solution of the problem (3.3), then there exists a constant C such that
Proof: See the proof of Lemma 4.1 in [12] □
In this subsection, we totally discretise the semidiscrete scheme (3.3) on a uniform mesh . Let the approximation of un(x) at xm be denoted by , 0 ≤ m ≤ M. Similarly, let the approximations of and be denoted respectively by and .
Using the upwind finite difference scheme and nonstandard finite difference methodology of Mickens [13], the semidiscrete problem (3.3) can be fully-discretised as
where
and the denominator function is
The denominator function is derived systematically to replicate the dissipativity properties of the solution of the differential equations. Interested readers may refer to [14] for details. Observe that
and thus this function satisfies the condition (1) in definition 3.1.
The method in Eq. (3.9) is a linear nonstandard finite difference (LNSFD) and can be written as:
where
Equation (3.10) leads to the tridiagonal system which can be solved with Thomas Algorithm [15, 16].
Remark 3.8. The developed scheme is a linear difference equation even if the original equation (1.1) is nonlinear. This is one of the feature of NSFD.
The difference operator of (3.9) satisfies the following maximum principle. Hence (3.9) has a unique discrete solution .
Lemma 3.9. Let be fully discrete mesh functions. If and for 1 ≤ m ≤ M−1 then for 0 ≤ m ≤ M.
Proof: Let us proof by contradiction. Assume there is m* such that . Thus, we have, m*∉{0, M}, and Now, from (3.9) we have
which contradicts the given assumption for 1 ≤ m ≤ M−1 and hence for 0 ≤ m ≤ M. □
This leads immediately to the following stability result, analogous to the continuous result.
Lemma 3.10. [Uniform stability estimate for discrete problem]
Let , be any mesh functions such that , then
Proof: Define
which implies
and, for m = 1, 2, ⋯ , M−1,
Since , one has . Thus, by discrete maximum principle given in Lemma 3.9, one obtains . This gives the required result
□
Remark 3.11. Lemmas 3.9 and 3.10 show the developed nonstandard finite difference method replicates the positivity and boundedness of the solution, respectively. Hence, the proposed method is qualitatively stable.
Theorem 3.12. (Error estimate in the spatial direction)
Let un+1(x) be the solution of the semidiscrete problem (3.4) and be the solution of the full discretisation (3.9). Then, the error estimate is given by
Proof: The truncation error of the complete discretization (3.9) is given by
where
Applying absolute values and using triangle inequalities in (3.15) leads to
From the use the Taylor series expansions of some terms in the above equation, on obtains
for some ηi such that xm−1 ≤ ηi ≤ xm+1, i = 1, 2, 3, 4.
Substituting equations (3.17)–(3.20) in (3.16) and from the boundedness of an(x) in (3.8), one has
and this gives
Applying Lemma 7 of [17] gives
which, upon use of Lemma 3.10, leads to
□
Combining the schemes (3.3) and (3.9), one obtains the following fully-discrete scheme on the mesh .
The temporal and spatial error estimates in Theorem 3.6 and 3.12, respectively, give the the following main result of this paper.
Theorem 3.13. If u(x, t) is the exact solution of the continuous problem (1.1) and is the solution of the fully-discrete scheme (3.24), then
Therefore, the presented discrete scheme is ε-uniform convergent of order one both in time and space.
In this section, two test examples are provided to demonstrate the efficiency and applicability of the proposed numerical method. The first example is taken from a recent article [7] for ε = 1, and we modified it by multiplying the highest derivative term by ε to make the problem singularly perturbed. It is the first time to consider this example for the singularly perturbed case. The second example is taken from [2] for different initial and boundary conditions to satisfy our assumption (2.1). All the computations are carried out by Intel Coreå i5-4210M CPU @2.60GHz×4 with MATLAB 2017.
Example 4.1. Consider the following singularly perturbed Burgers-Huxley problem:
where
For ε = 10−4, α = β = 1 and γ = 0.5, we plotted the numerical solution of Example 4.1 using the proposed method in Figure 1. As we see, the method resolves the boundary layer at x = 1. Thus, our proposed method replicates the property of the continuous solution.
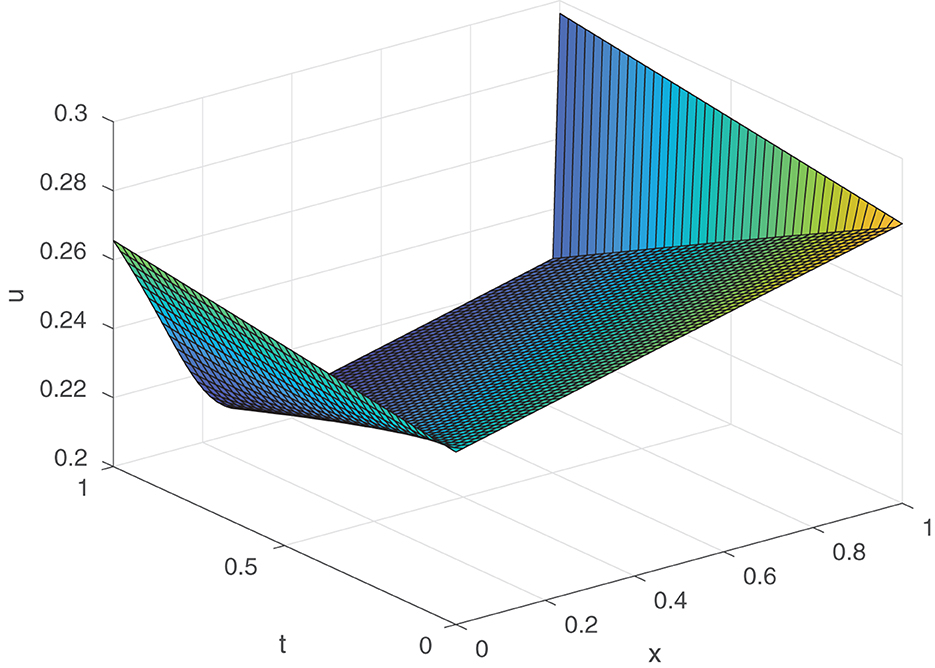
Figure 1. Numerical solutions of Example 4.1 using the proposed method for T = 1, M = 64, N = 40 and ε = 10−4. A layer is observed near x = 1.
Since the exact solution of this problem is not known, for each ε, the maximum pointwise error is calculated using double mesh principle [18] given by
where and are approximate solutions to problem (3.9) on DM, N and D2M, 2N, respectively. The corresponding order of convergence is given by
In Tables 1, 2, we compute the maximum absolute errors and the corresponding order of convergences using the proposed method for α = β = 1, γ = 0.5 and various values of ε with fixed values of M and N, respectively. From these results, we can observe that the method is ε-uniform convergent of order one both in time and space. This confirms the theoretical error results.
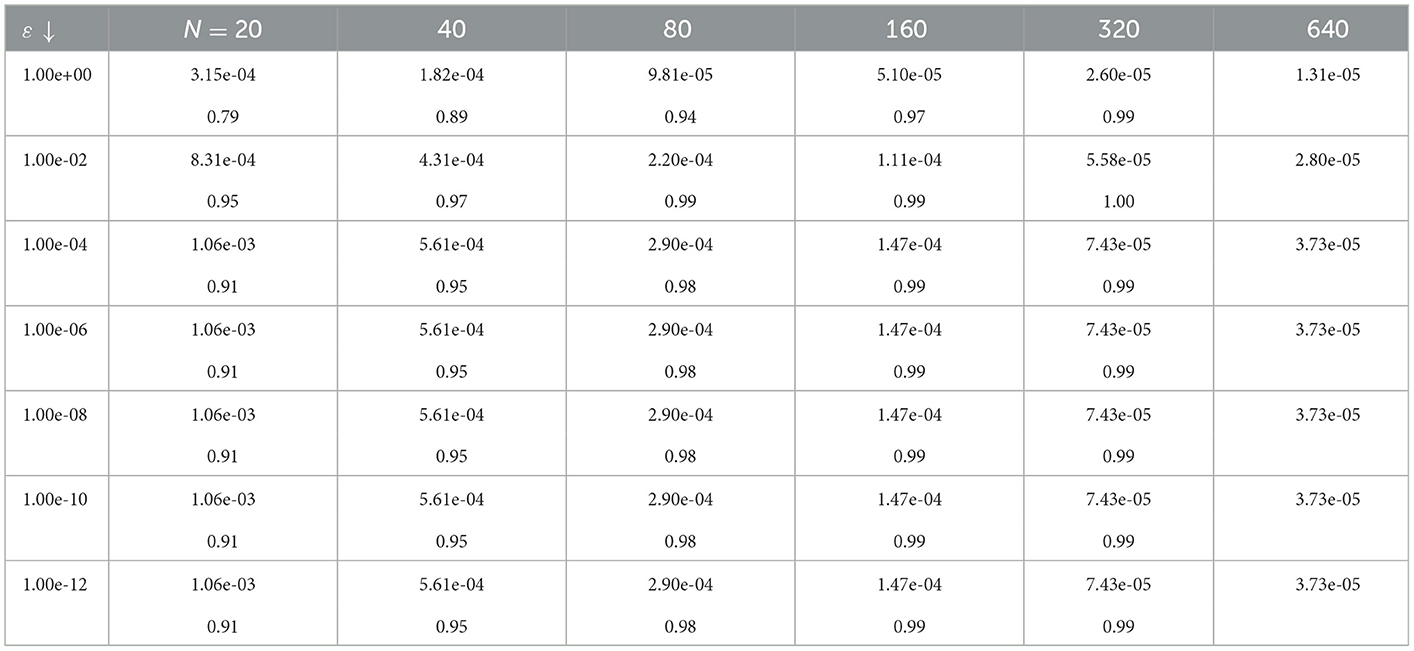
Table 1. Maximum absolute errors for Example 4.1 for M = 32 at the number of intervals N.
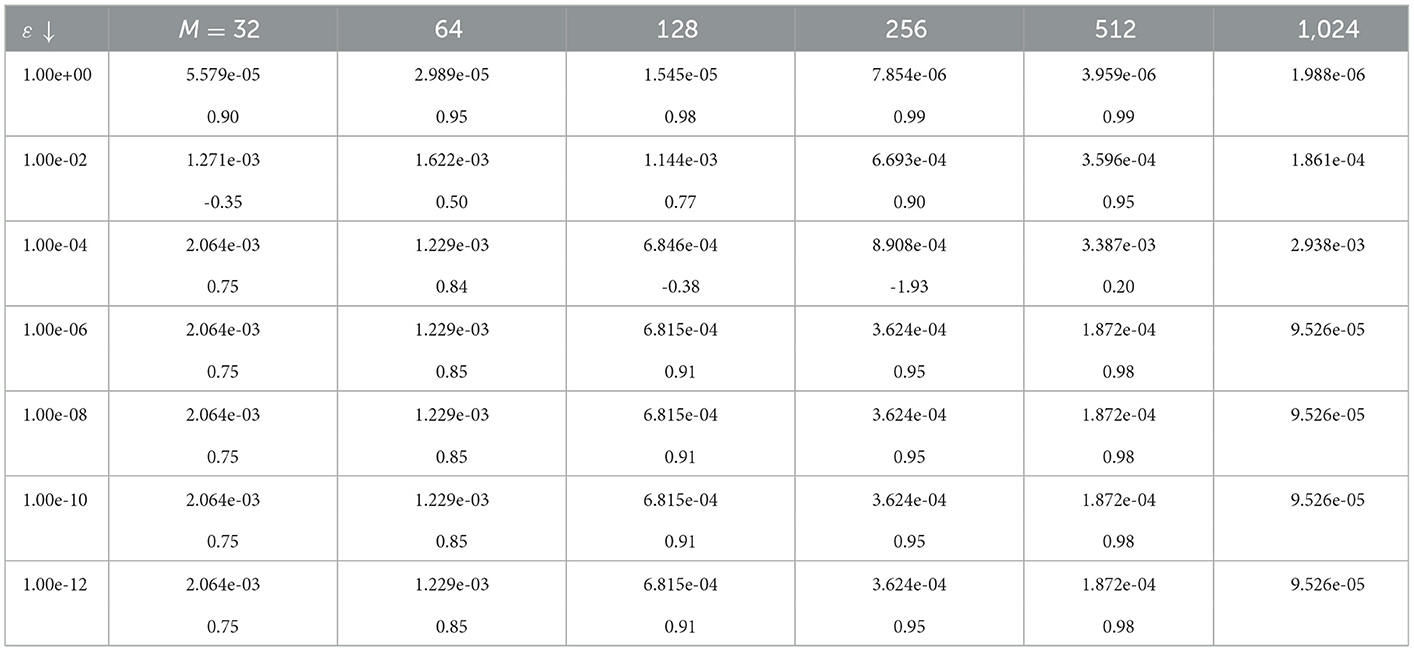
Table 2. Maximum absolute errors for Example 4.1 for N = 10 at the number of intervals M.
Table 3 compares absolute errors at some values of x and t using the proposed method and methods in [7, 19] and the nonlinear nonstandard finite difference (NNSFD) method given by
where the denominator functions
The nonlinear system (4.1) can be easily solved using Newton's method (see in [7]). The solution at the previous time-step is taken as the initial estimate. The methods considered in [7] and [19] are NSFD methods and variational iteration method (VIM), respectively. From the table, we observe that our proposed method gives more accurate results.
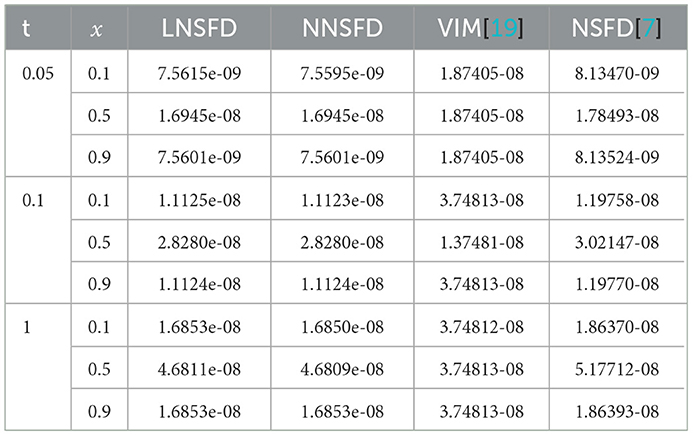
Table 3. Comparison of absolute errors for Example 4.1 using the proposed scheme (LNSFD) with results of [7, 19] and NNSFD for ε = 1, α = β = 1, γ = 0.001 at some values of x and t.
Also, in Table 4, we compare the CPU times required to compute the solutions of Example 4.1 for M = 10, N = 2000, α = β = 1, γ = 0.001, T = 10 using the LNSFD and NNSFD methods. As one can observe in the table, the CPU time for NNSFD is larger than the LNSFD.

Table 4. CPU time for Example 4.1.
Example 4.2. Consider the following SPBHE [2]:
In this paper, a nonstandard finite difference method for a singularly perturbed Burgers-Huxley equation has been developed. First, the backward-Euler scheme was applied to discretize the problem (1.1) with respect to time derivative and the upwind nonstandard finite difference scheme on uniform mesh to approximate the spatial derivative. Then, the presented method was proved to be first-order convergent in both the spatial and temporal variables. Numerical results are given in Figures 1, 2 and in Tables 1–6 for two test examples to confirm the theoretical results and to compare with recent results. It has been observed from these figures and tables that the numerical results are in agreement with the theoretical findings. For ε = 1, in Table 3, comparisons with the NNSFD and the VIM of [19] and the NSFD method of [7] reveal that the proposed NSFD method gives more accurate results. In addition, the present method is also applicable when 0 < ε < 1. Thus, in all cases, the present method produces more accurate results than the existing schemes.
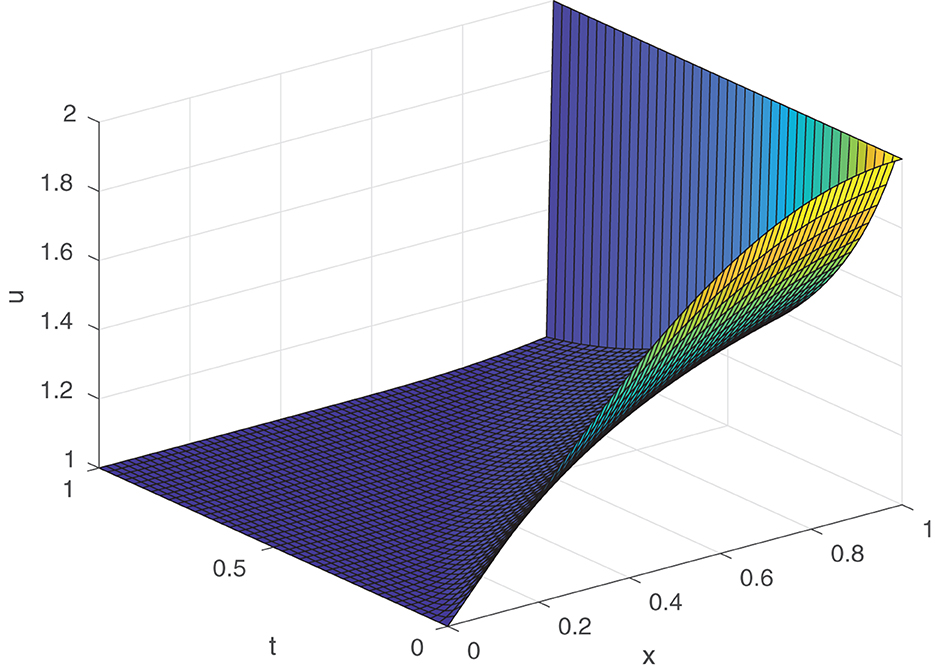
Figure 2. Numerical solutions of Example 4.2 using the proposed method for T = 1, M = 64, N = 40 and ε = 10−4. A layer is observed near x = 1.

Table 5. Maximum absolute errors for Example 4.2 for M = 32 at the number of intervals N.
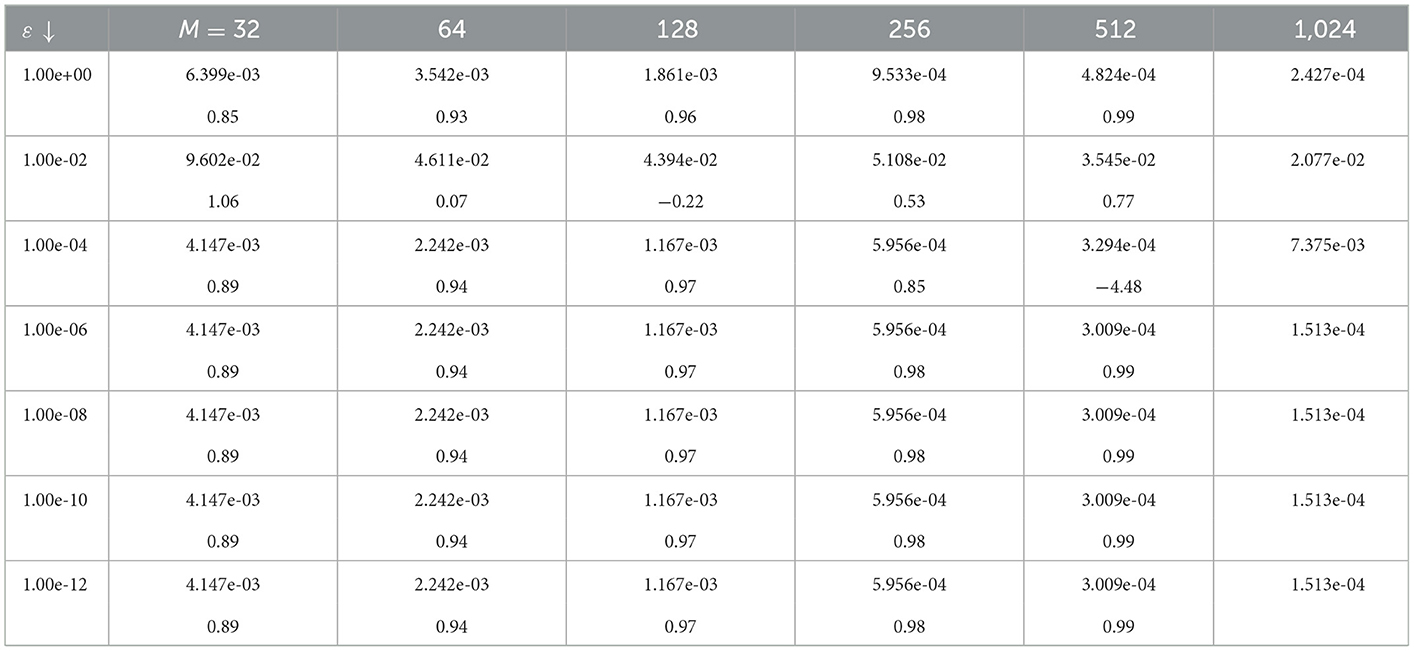
Table 6. Maximum absolute errors for Example 4.2 for N = 10 at the number of intervals M.
For future work, one may proceed with a higher order scheme for the problem under consideration for example by using the Crank-Nicolson method or those presented in [20, 21]. We are currently working in this direction. Also to note is that higher order parameter-uniform numerical methods for Burgers-Huxley equations are quasi-absent. The design of direct higher order parameter-uniform convergent methods is thus an interesting direction to explore.
The original contributions presented in the study are included in the article/supplementary material, further inquiries can be directed to the corresponding author.
ED constructed the scheme and implemented the MATLAB code under JM's supervision. All authors participated in the analysis of the theoretical results and in the writing of the manuscript.
ED acknowledges the support received from the Department of Applied Mathematics of the Adama Science and Technology University which ensured that the author is registered for his Ph.D. study at the University for 4 years.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
1. Kaushik A, Sharma MD. A uniformly convergent numerical method on non-uniform mesh for singularly perturbed unsteady Burger-Huxley equation. Appl Math Comput. (2008) 195:688–706. doi: 10.1016/j.amc.2007.05.067
2. Liu LB, Liang Y, Zhang J, Bao X. A robust adaptive grid method for singularly perturbed Burger-Huxley equations. Elect Res Arch. (2020) 28:1439. doi: 10.3934/era.2020076
3. Kadalbajoo MK, Sharma KK, Awasthi A. A parameter-uniform implicit difference scheme for solving time-dependent Burgers' equations. Appl Math Comput. (2005) 170:1365–93. doi: 10.1016/j.amc.2005.01.032
4. Wang X, Zhu Z, Lu Y. Solitary wave solutions of the generalised Burgers-Huxley equation. J Phys A Math Gen. (1990) 23:271. doi: 10.1088/0305-4470/23/3/011
5. Wazwaz AM. Travelling wave solutions of generalized forms of Burgers, Burgers-KdV and Burgers-Huxley equations. Appl Math Comput. (2005) 169:639–56. doi: 10.1016/j.amc.2004.09.081
6. Yefimova OY, Kudryashov N. Exact solutions of the Burgers-Huxley equation. Appl Math Mech. (2004) 3:413–20. doi: 10.1016/S0021-8928(04)00055-3
7. Appadu AR, Inan B, Tijani YO. Comparative study of some numerical methods for the Burgers-Huxley equation. Symmetry. (2019) 11:1333. doi: 10.3390/sym11111333
8. Derzie EB, Munyakazi JB, Dinka TG. Parameter-uniform fitted operator method for singularly perturbed Burgers-Huxley equation. J Math Model. (2022) 10:515–34. doi: 10.22124/jmm.2022.21484.1883
9. Gupta V, Kadalbajoo MK. A singular perturbation approach to solve Burgers-Huxley equation via monotone finite difference scheme on layer-adaptive mesh. Commun Nonlinear Sci Numer. (2011) 16:1825–44. doi: 10.1016/j.cnsns.2010.07.020
10. Mickens RE. Nonstandard finite difference models of differential equations. World Scientific. (1994). doi: 10.1142/2081
11. Anguelov R, Lubuma JMS. Contributions to the mathematics of the nonstandard finite difference method and applications. Numer Methods Partial Differ Equ. (2001) 17:518–43. doi: 10.1002/num.1025
12. Kadalbajoo MK, Gupta V. Hybrid finite difference methods for solving modified Burgers and Burgers-Huxley equations. Neural Parallel Sci Comput. (2010) 18:409–22.
13. Mickens RE. Advances in the applications of nonstandard finite difference schemes. World Scientific. (2005). doi: 10.1142/5884
14. Mickens RE. Calculation of denominator functions for nonstandard finite difference schemes for differential equations satisfying a positivity condition. Numer Methods Partial Differ Equ. (2007) 23:672–91. doi: 10.1002/num.20198
15. Kumari A, Kukreja V. Robust septic Hermite collocation technique for singularly perturbed generalized Hodgkin-Huxley equation. Int J Comput Math. (2022) 95:24. doi: 10.1080/00207160.2021.1939317
16. Kumari A, Kukreja V. Error bounds for septic Hermite interpolation and its implementation to study modified Burgers' equation. Numer Algorithms. (2022) 89:22. doi: 10.1007/s11075-021-01173-y
17. Munyakazi JB, Patidar KC. Limitations of Richardson's extrapolation for a high order fitted mesh method for self-adjoint singularly perturbed problems. J Appl Math Comput. (2010) 32:219–36. doi: 10.1007/s12190-009-0245-6
18. Doolan EP, Miller JJ, Schilders WH. Uniform Numerical Methods for Problems with Initial and Boundary Layers. Dublin: Boole Press. (1980).
19. Batiha B, Noorani M, Hashim I. Application of variational iteration method to the generalized Burgers-Huxley equation. Chaos, Solitons & Fractals. (2008) 36:660–3. doi: 10.1016/j.chaos.2006.06.080
20. Kovacs E, A. class of new stable, explicit methods to solve the non-stationary heat equation. Numer Methods Partial Differential Eq. (2021) 37:2469–89. doi: 10.1002/num.22730
Keywords: Burgers-Huxley equation, singularly perturbed problem, nonlinear equation, nonstandard finite difference methods, parameter-uniform convergence, error analysis, error bounds
Citation: Derzie EB, Munyakazi JB and Dinka TG (2023) A NSFD method for the singularly perturbed Burgers-Huxley equation. Front. Appl. Math. Stat. 9:1068890. doi: 10.3389/fams.2023.1068890
Received: 13 October 2022; Accepted: 27 January 2023;
Published: 13 February 2023.
Edited by:
Lei Zhang, Shanghai Jiao Tong University, ChinaReviewed by:
Youssri Hassan Youssri, Cairo University, EgyptCopyright © 2023 Derzie, Munyakazi and Dinka. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Eshetu B. Derzie,  ZXNoZXQuYmVsZXRlQGdtYWlsLmNvbQ==
ZXNoZXQuYmVsZXRlQGdtYWlsLmNvbQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.