 Luis A. Alarcón-Ramos1
Luis A. Alarcón-Ramos1 Roberto Bernal Jaquez
Roberto Bernal Jaquez- 1Posgrado en Ciencias Naturales e Ingeniería, Universidad Autónoma Metropolitana-Cuajimalpa, Mexico City, Mexico
- 2Departamento de Matemáticas Aplicadas y Sistemas, Universidad Autónoma Metropolitana-Cuajimalpa, Mexico City, Mexico
- 3Chair of Automatic Control, Kiel-University, Kiel, Germany
In this paper the problem of designing an output-feedback control for the stabilization of the extinction steady-state in a virus spreading process over a complex network with quarantine is considered. Sufficient conditions are established for the choice of those nodes for which sensor information is necessary and those which should be controlled using notions from constructive control theory. A simple output-feedback control is proposed which exponentially stabilizes the extinction state. Numerical simulation results are provided to illustrate the functioning of the proposed control scheme for a scale-free network of N = 106 nodes.
1. Introduction
Studies on the propagation and control of viruses and infectious diseases in human and animal populations [1–8] have gained a great importance in the last years. Understanding and controlling spreading processes is a problem of interdisciplinary nature [9–12]. The use of mathematical and physical inspired models that give account of the dynamics of propagation of infections have gained acceptance since the London cholera epidemics in September 1853 when John Snow divided a map of London into sectors (in a way, nowadays, equiparable to a Voronoi diagram) to calculate who was most likely to use each water pump in the city and in this way, discovered that the 40 Broad Street pump was the main focus of the cholera infection.
Some decades later, McKendrick [13] and Kermack and McKendrick [14] proposed the SIR model that divides the population in three different compartments or groups of individuals: Susceptible, Infective, and Recovered (or Removed) that had the disease and become immune or died. This pioneering work gave birth to the SIS (Susceptible-Infected-Susceptible) model mainly because many diseases do not confer any immunity. Extensions such as the SIQ (Susceptible-Infected-Quarantine) model (see e.g., [15–17] ) appeared in order to account for the dynamics of the spreading of infections when quarantine has been implemented as a means to control the massive spreading of the infectious disease. Accordingly, a new class of quarantined individuals is included. These individuals are removed, with some probability from the class of infected individuals.
Although these models were proposed for modeling spreading in populations with no structure, nowadays the SIS and SIQ models have been extended to model the spreading process in a population mapped on a complex network.
In recent years, Markov-chain based models for a Susceptible-Infected-Susceptible (SIS) dynamics over complex networks have been used [4–8, 18] to describe spreading processes in networks. Using these models, it is possible to determine the macroscopic properties of the system as well as the description of the dynamics of individual nodes. One interesting result is that the calculated infection threshold depends on the value of the spectral radius of the adjacency matrix, thus relating the network structure with spreading behavior.
In the present work we will study the spreading of diseases using a Markov-chain based model for a Susceptible-Infected-Quarentine (SIQ) dynamics over a complex network that has been used in a simplified version for the determination of stability tresholds in recent studies by the authors [15, 17]. We will show that, even when the built-in control strategy of quarantine is not able to ensure virus extinction, it is always possible to solve the problem of epidemic spreading extinction. In order to accomplish this task, we determine sufficient conditions for stabilizing the extinction state in a complex network of arbitrary topology. One remarkable point is that, these conditions give a clue to identify the nodes that do not need any control to reach the extinction state and distinguish them from the nodes that need to be controlled. Inspired on the ideas of control theory, the set of nodes that do not need to be controlled (in order to reach the extinction state) will be associated with the zero dynamics of the system [19, 20]. At the same time, the set of nodes to be monitored and controlled will be identified and a decentralized feedback control will be applied in order to stabilize the extinction state. Accordingly, it is proven that the extinction state is an exponentially stable fixed point for the zero dynamics.
We have performed numerical simulations using a scale-free complex network with 1 million nodes constructed as proposed by Barabasi [21] and found a complete agreement of the numerical results with our theoretical findings.
The paper is organized as follows: section Methods presents the problem statement for the SIQ model mapped on a complex network of arbitrary topology and the control problem we want to solve together with some definitions. In section Results, sufficient conditions for the stabilization of the extinction state are derived. Using these conditions we establish a selection criterion that allows to identify the set of nodes that need to be controlled in order to reach the extinction state. Afterwards, we design a simple stabilizing output-feedback control and present our simulation results. In section Discussion and Conclusions we summarize our main results and present our main conclusions.
2. Methods
As pointed out in the introduction, the SIQ model belongs to a class of models that are used to capture possible human interactions employed to impede the spreading of an infection process and it is essentially an extension of the SIS model in which the model and control strategies are co-developed to yield a kind of closed-loop control model [22]. In order to reveal the dynamics and essential mechanisms of this model, we proceed to (i) formulate the SIQ model in a complex network (ii) introduce the specific control problem.
2.1 The SIQ Model in a Complex Network
Consider a network of N nodes described by an undirected graph G(V, E) of any topology. Let V = {v1, v2, …, vN} being the set of nodes and E = {ei, j} the set of connecting edges. The adjacency matrix associated to G(V, E) is given by A = {aij}, where aij = 1 if ei, j ∈ E and zero otherwise. The set of neighbor nodes of a node vi ∈ V is defined as
and the number of neighbors or degree of a node vi is given by .
As formulated in Bernal Jaquez et al. [15], the underlying process for every node is depicted in Figure 1, as a discrete time Markov process. A node vi can be in state I (Infected) with probability pi(t), in state Q (Quarantine) with probability qi(t), or in state S (Susceptible) with probability si(t) = 1 − pi(t) − qi(t). At each time step, the probability functions pi(t), si(t) are updated due to the fact that every node can transit from state S to state I with probability 1−ζi or from state I to state Q with probability τi and from state Q to state S with probability μi because nodes are interacting.
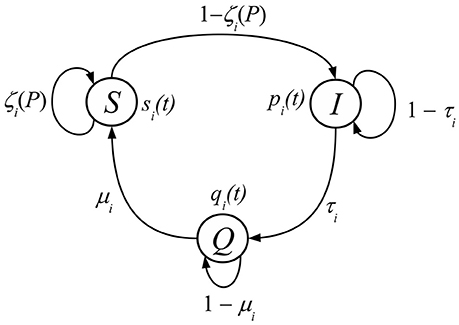
Figure 1. State transition diagram for each node vi ∈ V. The states Infected, Quarantine and Susceptible are represented by I, Q, and S, respectively.
According to the transition diagram shown in Figure 1, we have the following dynamical system:
where, for every node vi ∈ V, τi is the internment probability associated to quarantine, μi is the recovery probability and ζi(P(t)) is the probability of a node vi of not being infected by any neighbor at time t, which is given by
In the above equation, we have defined the vector and βi is the probability of infection during a single contact, rij is the probability that the node vi performs at least one contact intent with its neighbor vj ∈ Vi. The probability rij is also known as the connection probability and depends on the number of contact intents (or interaction rate).
Note that in system (2)
From the model (2) we point out that
• Unlike the model proposed in Bernal Jaquez et al. [15] the system (2) considers non-homogeneous properties given by μi, τi, βi and rij.
• Quarantine is a control mechanism which is introduced in order to prevent virus spreading, however it could probably not be sufficient for achieving the extinction state, depending on the stability conditions (to be determined below). We can consider, instead, the objective of this work to design a controller to stabilize the extinction state, e.g., by adapting inherent propagation parameters like the propability of infection βi of some nodes to be specified.
We consider that each node has a manipulable variable ui(t), which is amenable for control. For the system 2, this manipulable variable can be βi or rij, i.e., we consider that, for each node vi, it is possible to improve its health or avoid to perform several contact attempts with its neighbor nodes, the control will adapt one of these parameters, that will be selected according to our mathematical analysis.
2.2 Control Problem
Quarantine is an heuristic control mechanism or strategy that intents to reduce a virus propagation in a population. As stated in the last subsection, these kind of models probably are not sufficient to ensure the system to reach the extinction state. This is due to the fact that no adaptation of the network parameters is implemented in dependence of the actual system state. Such a mechanism is proposed in the sequel including decisions on (i) the subset of nodes VM ⊂ V which should be monitored, i.e., whose actual state must be known at each time instant, (ii) the subset of nodes VC ⊂ V which have to be controlled, i.e., whose interaction parameters (ui = βi or ui = rij) should be subject to on-line adaptation, and (iii) the specific control law ui(t) = φi(P(t)) which should be used for this adaptation.
The chosen approach follows the constructive (i.e., passivity-based) control idea, and consist in two steps:
a) Assigning the necessary outputs so that the associated zero dynamics is asymptotically stable.
b) Designing controllers ui(t) = φi(Yi(t)) so that for some 0 ≤ γ < 1 it holds that
3. Results
In this section the main results are presented. In particular sufficient conditions for the stabilization of the extinction state are derived including (i) a selection criterion for the nodes to be monitored in terms of the connectivity parameters, the infection probability and the graph topology and (ii) the design of a simple stabilizing output-feedback control scheme. Simulation results illustrate the functioning of the proposed control scheme for a scale-free network with N = 106 nodes.
3.1 Selection of Monitored and Controlled Nodes
Taking into account that pi(t) + qi(t) + si(t) = 1 for each vi ∈ V and to be consistent with the control idea, we consider that ζi(P) = ζi(P, U), where the vector , vci ∈ VC represent the manipulable set of parameters associated with βi or rij. So, we can rewrite system (2) as follows
The fixed points associated with the dynamics (4) for some constant U* (i.e., βi and rij are set to some constant value) can be determined by substituting the relations and . After some algebra it follows that
Note that the extinction state in (2), for vi ∈ V is a fixed point when . However, up to this point, it is not clear if the extinction state or any other fixed point given by (5) are stable. The extinction state means that no viruses are propagated over the network and, as we will see in the following Lemma, knowledge of the conditions under which this state is reached, will give us a clue of how viruses are propagated.
The approach followed subsequently exploits ideas from Wang et al. [4], and Bernal Jaquez et al. [15] by establishing a linear bounding dynamics for (4) that has the origin (P, Q) = (0, 0) as exponentially stable fixed point.
Lemma 1. Consider the dynamics (4) on a complex network with graph G(V, E) and adjacency matrix A. The extinction state (P, Q) = (0, 0) is globally exponentially stable if the constant vector U* (i.e., for some constant values of βi and rij) is such that
where σ(·) is the spectral radius of the matrix H defined as
where
and I being the identity matrix.
Proof. As it is proved in Wang et al. [15], and Bernal Jaquez et al. (), can be bounded as follows
Substituting this bound into the first equation in (4) and after some algebra one obtains
This can be written in matrix form as
where and , and the inequality being interpreted as element-wise. Therefore, the solutions of pi(t) are bounded by the linear dynamics
i,e., forall t ≥ 0 it holds that
if p(0) = x(0), q(0) = w(0). The linear dynamics can be expressed in matrix form as
where and . It holds that (XT, WT)T = (0T, 0T)T is exponentially stable if and only if the eigenvalues of the associated matrix H are contained in the open unit circle ℂ1 = {λ∈ℂ||λ| < 1}. Taking into account (11) it follows that a necessary and sufficient condition for global exponential stability of (PT, QT)T = 0 is given by (6). ▢
The expontial stability condition (6) is very general and does not provide any idea on how to select nodes to be controlled or monitored in order to reach the extinction state. However, using this result as a point of departure, we can get insight into the condition that every node vi ∈ V has to fulfill in order to ensure that P(t) converges to P* = 0 as shown in the following Lemma.
Lemma 2. For a constant U* (i.e., for some constant value for βi and rij), the state vector (PT(t), QT(t))T globally exponentially converges to the extinction state (PT, QT)T = 0 if for every node vi ∈ V it holds that
Proof. In virtue of Lemma 1 it is sufficient to show that if the condition (13) holds, the matrix H defined in (6) has only eigenvalues within the open unit circle ℂ1 ⊂ ℂ, or equivalently, that its spectral radius σ(H) < 1. Note that due to the block-diagonal structure of the matrix H its eigenvalues are given by the eigenvalues of the two matrices on its diagonal, i.e., in terms of the matrix spectra
where denotes the spectrum of a matrix A, i.e., the union of all its eigenvalues. The eigenvalues of the matrix I−M are contained in ℂ1, given that M is diagonal with entries 0 < μi < 1. Thus ,it remains to show that . This can be analyzed by applying Gerschgorin's Theorem [23], which provides an upper-bound estimate for the spectral radius of a given matrix. In the following, let λ represent an arbitrary eigenvalue of the matrix I−T+BR. The application of this theorem to the matrix I−T+BR provides the following inequality
i = 1, …, N. Thus, |λ| < 1 is satisfied if
or equivalently if (13) holds true. This complete the proof. ▢
Note that, as stated in the proof the convergence to zero of X (and thus P) is independent of the behavior of W (or accordingly Q). This resides in the fact that the dynamics represent a cascade structure. Accordingly, for the purpose of stabilizing the extinction state it is sufficient to ensure that less nodes get infected than pass into quarantine. This intuitively clear condition is exactly what is formally stated in Lemma 2.
The condition (13) gives a criterion on how to choose the nodes to be monitored. If condition (13) does not hold for some set of nodes, then it is appropriate to consider this collection as the set of nodes to be monitored VM. Additionally, according to (13), the set of controlling nodes can be set as VC = VM. That is, we can consider that all controlled nodes are monitored. In this way, we can select βi (or rij) as the parameter amenable for control purposes for those nodes that do not satisfy (13).
Further note that in case that the network parameters are homogenous, i.e., all nodes have the same parameter values μ, β, τ, rij = r, the selection criterion for a node to be controlled is directly related to its degree (i.e., here simply the number of neighboring nodes) and can be expressed as
Nevertheless, when the parameter distribution is non-homogenous, it is possible that nodes with high degree do not have to be controlled and nodes with small degree have to be, given the particular constellation between τi, βi and rij according to condition (13). This is illustrated in Figure 2 for a scale-free network with N = 100 nodes and normally distributed parameters.
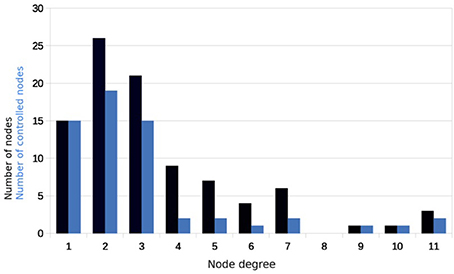
Figure 2. Number of nodes with a given degree (black) in a non-homogenous scale-free network with N = 100 nodes and normally distributed parameters and number of nodes of the given degree that need to be controlled (blue).
Note that in the notion of constructive control theory (see e.g., [19, 24]), the dynamics of the nodes that are not controlled establishes the zero dynamics (i.e., the dynamics resulting from the restriction that pi = 0 for all i such that vi ∈ Vc) and by construction this dynamics is asymptotically stable. Therefore, the zero dynamics correspond to a spreading process over a reduced network, from which the monitored (and thus controlled) nodes have been withdrawn, given that for pi(t) ≡ 0 the node vi does no longer interact with its neighbors.
3.2 Feedback Control Design
The question addressed in this section is how to design the feedback control for the nodes vj ∈ VC so that . Up to this point, we have not considered the dependency of ζ(P, U) on U, given that U was considered as a set of constant parameters. This dependency will permit to explicitly determine a control law ui(t) = βi(t) that steers the nodes vj ∈ VC to their desired values . With this idea, the following theorem is established
Theorem 1. Consider the dynamics given by (4) and consider the nodes that do not satisfy (13) as the set VC of nodes to be controlled. Let VM = VC, that is, all controlled nodes are monitored. If the controls ui(t) satisfy
then (PT, QT)T = 0 is exponentially stable.
Proof. The Theorem can be easily proven as follows. Let be given as in (15). It follows that
Given that for inequality (13) is satisfied, one obtains
or equivalently
implying that inequality (13) is satisfied. In consequence, the exponential stability of (PT, QT)T = 0 follows. ▢
Note that following a similar reasoning, a control law can be established for the case that ui(t) = rij(t). Nevertheless, this approach will not be explicitely elaborated at this place.
From Theorem 1, we have that in order to stabilize the extinction state for the dynamics (4) it is sufficient to design feedback controls ui(t) for all nodes vi ∈ VC, which take values below the upper-bound defined in (15). For example, a simple linear feedback control given by
does satisfy this condition. Note that the advantage of using a time varying control law βi(t) consists in actively adapting the infection probability on the actual needs, i.e., the actual network state. In comparison with imposing a constant value for βi this possibly enables to optimize the control effort over time, because according to (16) with pi → 0. The performance using this simple output-feedback control is illustrated in the subsequent section.
3.3 Simulations
In order to verify our results, we perform several simulations of the dynamical system (4), for different initial conditions, with the following considerations
• We used a scale-free network of N = 106 described by G(V, E), that incorporates preferential attachment according to Barabási and Albert [21]. We started with a small number mo = 9 of vertices, linked randomly, and at every step we add a new node or vertex with m = 3 edges until we reach N = 106. We emphasize that our results are independent of the network's topology.
• To facilitate our simulations, we consider that rij = rji.
• The constant values for the recovery probability μi, the probability of infection βi, the internment probability τi, and the contact probability ri were distributed uniformly over the nodes with values in the interval [0.2, 0.7].
• To show and corroborate our results, we calculated the average probability ρ(t) given by
• The sets VC and VM are chosen according to Lemma 2 as the sets of nodes that do not satisfy (13). For the case considered here 424569 nodes out of N = 106 (i.e., about 42.5%) have to monitored and controlled.
Simulation studies have been performed considering the following scenarios:
I. Absence of control: All parameters of the system (4) have constant values which not necessarily satisfy condition (13).
II. Zero dynamics: The output was constrained to Y(t) = 0 by setting βj = 0 and pj(0) = 0 for all vj ∈ VM = VC.
III. Linear feedback control: The linear feedback control given by (16) has been implemented for all vi ∈ VM = VC.
I. Absence of Control
In the absence of control the network reaches an endemic attractor state where about a 20% of the nodes are probably infected after about 20 time units as can be seen in Figure 3.
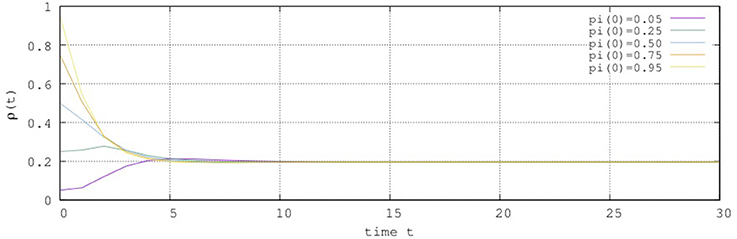
Figure 3. Behavior of ρ(t) for several initial conditions without control.
II. Zero Dynamics
To corroborate that the zero dynamics are exponentially stable, we set Y(t) = 0 for those nodes that do not satisfy (13). This is achieved by setting βi = 0 for vi ∈ VM.
Figure 4 shows the behavior of the nodes associated with the zero dynamics. Note that the extinction state is reached after 18 time steps.
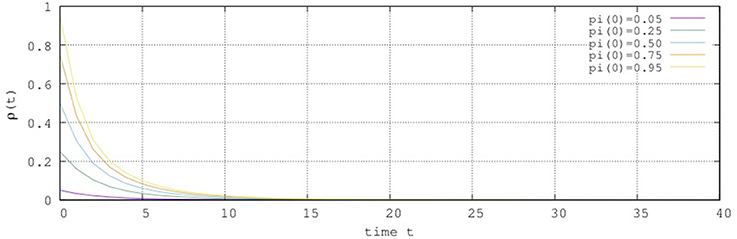
Figure 4. Behavior of the zero dynamics.
III. Linear Feedback Control
To show the performance of the proposed simple output-feedback control scheme (16), it has been implemented for all monitored and controlled nodes with the gain γ = 0.9 and the upper bound calculated according to (15). This yields the output-feedback controller.
Note that the control (18), depends on the state of the node i given by pi(t), and the properties of its neighbors given by . Figure 5 shows the result of the simulation with the applied control (18). As predicted in Theorem 1 the extinction state is a close-loop attractor, and is reached in about 40 time steps.
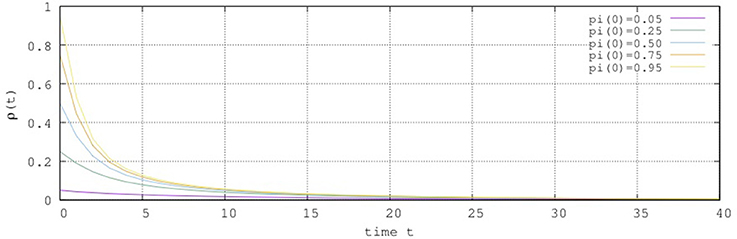
Figure 5. Closed-loop network behavior with the linear feedback control given by (18).
4. Discussions and Conclusions
The problem of deciding which nodes in a complex network with quarantine should be controlled and how to control them in order to achieve that in the closed-loop system the extinction state becomes a (global) attractor has been studied. Sufficient conditions for virus extinction have been derived using a constructive control approach by suitably identifying the zero dynamics according to a threshold condition for the stability of the extinction state. The associated node selection criterion does depend on the transmission probability between the nodes and their neighbors, the degree of each node and its probability to pass into quarantine. It has been shown that in spite of the strongly nonlinear dynamics of the spreading process the extinction state can be efficiently stabilized using a simple linear bounded output-feedback control if the nodes to be controlled are selected according to the proposed scheme. The performance and behavior of the spreading process without and with control has been illustrated for a scale-free network with N = 106 nodes.
Author Contributions
All authors designed and did the research, in particular the stability analysis. LA-R and AS conceived and designed the control and the numerical experiments. LA-R performed the numerical experiments. All authors analyzed the data. LA-R and RB wrote the paper. All authors reviewed the manuscript. All authors have read and approved the final manuscript.
Funding
This work was partially sponsored by Rector office of UAM Cuajimalpa through Programa de Apoyo a Proyectos Interdisciplinarios.
Conflict of Interest Statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
References
1. Wang W, Tang M, Zhang HF, Gao H, Do Y, Liu ZH. Epidemic spreading on complex networks with general degree and weight distributions. Phys Rev E (2014) 90:042803. doi: 10.1103/PhysRevE.90.042803.
2. Leventhal GE, Hill AL, Nowak MA, Bonhoeffer S. Evolution and emergence of infectious diseases in theoretical and real-world networks. Nat Commun. (2015) 6:6101. doi: 10.1038/ncomms7101.
3. Tomovski I, Trpevski I, Kocarev L. Topology independent SIS process: An engineering viewpoint. Commun Nonlinear Sci Numer Simul. (2014) 19:627–37. doi: 10.1016/j.cnsns.2013.06.033.
4. Wang Y, Chakrabarti D, Wang C, Faloutsos C. Epidemic spreading in real networks: an eigenvalue viewpoint. In: 22nd International Symposium on Reliable Distributed Systems, 2003. Florence. (2003). p. 23–5.
5. Chakrabarti D, Wang Y, Wang C, Leskovec J, Faloutsos C. Epidemic thresholds in real networks. ACM Trans Inf Syst Secur. (2008) 10:1–26. doi: 10.1145/1284680.1284681.
6. Gómez S, Arenas A, Borge-Holthoefer J, Meloni S, Moreno Y. Discrete-time Markov chain approach to contact-based disease spreading in complex networks. Europhys Lett. (2010) 89:38009. doi: 10.1209/0295-5075/89/38009.
7. Gómez S, Arenas A, Borge-Holthoefer J, Meloni S, Moreno Y. Probabilistic framework for epidemic spreading in complex networks. Int J Complex Syst Sci. (2011) 1:47–54. Available online at: http://www.ij-css.org/volume-01_01/ijcss01_01-047.pdf.
8. Meloni S, Arenas A, Gomez S, Borge-Holthoefer J, Moreno Y. Modeling Epidemic Spreading in Complex Networks: Concurrency and Traffic. In: Thai MT, Pardalos PM, editors. Handbook of Optimization in Complex Networks. New York, NY: Springer. (2012). p. 435–62.
9. Moreno Y, Nekovee M, Pacheco AF. Dynamics of rumor spreading in complex networks. Phys Rev E (2004) 69:066130. doi: 10.1103/PhysRevE.69.066130.
10. Borge-Holthoefer J, Moreno Y. Absence of influential spreaders in rumor dynamics. Phys Rev E (2012) 85:026116. doi: 10.1103/PhysRevE.85.026116.
11. Singh A, Singh YN. Rumor Spreading and Inoculation of Nodes in Complex Networks. In: Proceedings of the 21st International Conference on World Wide Web. WWW '12 Companion. New York, NY: ACM. (2012). p. 675–8.
12. Xie M, Jia Z, Chen Y, Deng Q. Simulating the spreading of two competing public opinion information on complex network. Appl Math. (2012) 3:1074–8. doi: 10.4236/am.2012.39158.
13. Mc'Kendrick AG. Applications of Mathematics to Medical Problems. Proc Edinburgh Math Soc. (1925) 44:98–130.
14. Kermack WO, McKendrick AG. Contributions to the mathematical theory of epidemics. II. —The problem of endemicity. Proc R Soc Lond A Math Phys Eng Sci. (1932)138:55–83.
15. Bernal Jaquez R, Schaum A, Alarcon L, Rodriguez C. Stability analysis for virus spreading in complex networks with quarantine. Publ Mat Uruguay (2013) 14:221–33. Available online at: http://pmu.uy/pmu14/pmu14.pdf.,
16. Chimmalee B, Sawangtong W, Wiwatanapataphee B. The effects of community interactions and quarantine on a complex network. Cogent Math. (2016) 3:1249141. doi: 10.1080/23311835.2016.1249141.
17. Alarcon-Ramos LA, Schaum A, Rodriguez Lucatero C, Bernal Jaquez R. Stability analysis for virus spreading in complex networks with quarantine and non-homogeneous transition rates. J Phys Conf Ser. (2014) 490:012011. doi: 10.1088/1742-6596/490/1/012011.
18. Schaum A, Bernal Jaquez R. Estimating the state probability distribution for epidemic spreading in complex networks. Appl Math Comput. (2016) 29:197–206. doi: 10.1016/j.amc.2016.06.037.
19. Monaco S, Normand-Cyrot D. Zero dynamics of sampled nonlinear systems. Syst Control Lett. (1988) 11:229–34.
22. Nowzari C, Preciado VM, Pappas GJ. Analysis and control of epidemics: a survey of spreading processes on complex networks. IEEE Control Syst. (2016) 36:26–46. doi: 10.1109/MCS.2015.2495000.
Keywords: complex networks, virus spreading, feedback control, quarantine, sensor location
Citation: Alarcón-Ramos LA, Bernal Jaquez R and Schaum A (2018) Output-Feedback Control of Virus Spreading in Complex Networks With Quarantine. Front. Appl. Math. Stat. 4:34. doi: 10.3389/fams.2018.00034
Received: 06 April 2018; Accepted: 12 July 2018;
Published: 08 August 2018.
Edited by:
Michael Ng, Hong Kong Baptist University, Hong KongCopyright © 2018 Alarcón-Ramos, Bernal Jaquez and Schaum. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Roberto Bernal Jaquez, cmJlcm5hbEBjb3JyZW8uY3VhLnVhbS5teA==