 Dušan Krokavec*
Dušan Krokavec* Anna Filasová
Anna Filasová- Department of Cybernetics and Artificial Intelligence, Faculty of Electrical Engineering and Informatics, Technical University of Košice, Košice, Slovakia
This paper attempts to resolve the problem concerning the interval observers design for linear systems with ostensible Metzler system matrices. Because system dynamics matrices are partially different from strictly Metzler structures, a solution is achieved by constructing a composed system matrix representation, which combines pre-compensated interval matrix structures fixed with a prescribed region of D-stability and the reconstructed strictly Metzler matrix structure, related to the original interval system matrix parameter definition. A novel design procedure is presented, which results in a strictly positive observer gain matrix and guarantees that the lower estimates of the positive state variables are non-negative when considering the given system structure and the non-negative system state initial values. The design is computationally simple since it is reduced to the feasibility of the set of linear matrix inequalities.
1 Introduction
Interval observers have appeared as an alternative technique for robust state estimation (Moisan et al., 2009). Whilst, when using the technique based on classical observers, only the initial condition is assumed to be unknown (Luenberger, 1971), interval observers structures are constructed assuming that the upper and lower bounds of the initial conditions are known (Raïssi and Efimov, 2018; Khan et al., 2020). The main limitation to the interval observers theory is that the trajectories of the system that start from an internally bounded initial condition will enclose the stable system trajectory only if the system is positive that its system matrix is Metzler and Hurwitz and that other matrix parameters are non-negative (Farina and Rinaldi, 2000). Thus, the positivity of interval estimation error dynamics is one of the most restrictive assumptions for interval observers design. When restricted to the Metzler structure of system matrices, as well as to non-negative input and output matrices, such systems are referred to as Metzler systems (Nikaido, 1968; Smith, 1995; Liu et al., 2011), with a stringent approach that reflects the diagonal stabilization principle. Although a certain class of systems can be transformed through a change of coordinates into positive cooperative systems (Mazenc and Bernard, 2011; Mazenc and Bernard, 2014), no general technique exists for such construction.
When maintaining platforms for positive systems with nonnegative states (Nikaido, 1968; Smith, 1995; Moisan et al., 2009), the theory of Metzler matrices (Berman et al., 1989) implies some additional parametric constraints to reflect the system positiveness (Shorten et al., 2009) and to construct the system representation (Son and Hinrichsen, 1996; Gao et al., 2005; Liu et al., 2017; Ito and Dinh, 2020). Since the linear time-invariant system theory cannot be directly used for linear positive systems, various combinations of linear programming and linear matrix inequalities (LMI) are generally used to represent Metzler systems (Ait Rami and Tadeo, 2006; Shu et al., 2008; Anderson and Murray, 2018; Guo et al., 2020). The benefits of a potential unification are presented (Krokavec and Filasová, 2018) when reflecting diagonal stabilization and associated Metzler system matrix parametric representations by a specific set of LMIs.
The system matrix parametric constraints give rise to substantially complex design methods when applied to positive systems with interval-defined model parameters (Ganesan, 2007). To demarcate the object of study in this field, Metzler matrix transforms are reflected for interval observers analysis (Mason, 2012; Chambon et al., 2015). Interval observers design for linear time-varying (LTV) systems, as well as for a class of non-linear time-varying systems with output specifications, exploits static coordinate transformation (Efimov et al., 2013; Raïssi and Efimov, 2018) when translating a stable LPV system to another stable and cooperative LPV system. The LMI-based conditions applicable in interval observers design for positive Metzler systems have also been studied (Krokavec and Filasová, 2020b). The utilization of interval observers for interconnected schemes is often applied in relation to distributed interval estimation and distributed feedback control (Wang et al., 2020; Wang X L et al., 2022; Zhang et al., 2022); this also reflects that their application for continuous linear large-scale systems is limited due to the system’s complexity (Wang T et al., 2022). These problems are still open in distributed applications since it is difficult to ensure that the system state will be enclosed by the cooperative estimated upper and lower bounds of the observed system state (Huong, 2022; Li et al., 2022), as well as in interval estimation strategy for anti-disturbance control of drones (Yong et al., 2020).
This paper contributes to the properties of the interval state estimation for linear systems with ostensible Metzler system matrices. It outlines a new LMI-based approach to determine interval observers with positive observer gains using a combined representation of the ostensible Metzler system matrix (Krokavec and Filasová, 2022). Design conditions are formulated using LMIs, respecting the diagonal stabilization principle, Metzler system matrix parametric constraints, and given interval matrix bounds. Because linear systems with ostensible Metzler matrices are not positive, even if their matrix parameters are non-negative, the main limitation to the solution is that the interval estimation only works for system state variables whose trajectories for a non-negative initial state are non-negative.
The outline of this paper is as follows. Following an introduction in Section 1, the basic preliminaries are discussed in Section 2. Section 3 presents the LMI structures necessary for observer stability and the positive gain, and the design method of interval observers for a given class of positive systems is presented in Section 4. To illustrate the design task, its efficiency is demonstrated by numerical solutions in Section 5; in Section 6, conclusions are briefly presented.
Throughout the paper, X ≺ 0 conveys briefly that a real square matrix X is a symmetric and negative definite, notations xT and XT identify the transpose of a vector or a matrix, In indicates the nth order unit matrix, function ρ(⋅) reflects the eigenvalue spectrum of a real square matrix, diag[ ⋅ ] enters a block diagonal matrix, the symbol * is used as ellipsis in a symmetric matrix,
2 Basic preliminaries
To explain the technique used, the main question can be illustrated using the linear Metzler systems given as follows:
where
Definition 1. Berman et al. (1989). A square matrix
This study also uses the term “a purely Metzler matrix
2.1 Positive continuous-time linear systems
The following assumptions make it possible to cover constraints on the parameters of system (1) and (2) when studying the system positivity and the conditions of its diagonal stabilizability.
Lemma 1. Tanaka and Langbort (2011). Disturbance-free system (1), (2) is internally positive if and only if A is (strictly, purely) Metzler and B, C are entry-wise non-negative.
In consequence, any solution of an autonomous and disturbance-free linear system with a Metzler matrix
Remark 1. A strictly Metzler matrix
These parametric constraints imply the strict application of the diagonal stabilization principle (Shorten et al., 2009; Mason, 2012) in analysis. If a strictly Metzler
the diagonal stabilization principle can be appropriately respected using the derived diagonal matrix structures related to AΘ as
for h = 0, 1, … , n−1.
Remark 2. Defining the matrix
and considering a diagonal matrix
The aforementioned results can be combined and reflected by the following lemma.
Lemma 2. Krokavec and Filasová (2020a) If a positive matrix
where h = 1, … , n − 1 and the diagonal matrices
The proof of the aforementioned lemma is based on the fact that only diagonal matric representations are applicable for the diagonal stabilization of positive systems.
2.2 Ostensible Metzler matrices
Given a system with the dynamical model (1) and (2) and considering that
Definition 2. Shores (2007) Matrix
If X and Λ are similar, then they have the same eigenvalues, their algebraic multiplicities are the same, their characteristic polynomials are the same, and their determinants and traces are the same.
Remark 3. Let
and
Theorem 1. Shores (2007) If for
where λk runs over ρ(X) with k = 1, … , n, and the eigenvectors of X and Y are identical.Supposing that A is ostensible Metzler, then the proposed idea means decoupling the system matrix A so that A = Ap + Am, where Ap is strictly Metzler and Am is entry-wise negative and Hurwitz.Lemma 3. Krokavec and Filasová (2022) A strictly Metzler
it yields
where
and
are defined for i, j ∈ ⟨1, n⟩, i ≠ j, whilst ρ(A°m) is the set of eigenvalues of the matrix A°m.Remark 4. Structure (21) implies, since the sum of the eigenvalues of a matrix equals its trace,
and so the set
2.3 Intervally defined ostensible Metzler matrices
In this case, is assumed that q(0) and the ostensible Metzler system parameter A are unknown but bounded by constant bounding vectors and constant bounding matrices of appropriate dimensions in such a way that (these inequalities being understood element-wise (Jaulin et al., 2001))
Since the main goal is the design of an interval observer of the state, it is considered that
Assumption 1. The function bounds
This assumption states that the disturbance is known up to some interval error
Corollary 1. Strictly Metzler
it yields
where Σ is from (20) and
3 General interval observers structure
Under these introduced assumptions, the interval observers equations for systems with intervally given ostensible Metzler matrices can be defined as follows:
where
Using the observation errors
it follows from (1), (33), and (34) that
To construct a Hurwitz stable
where
To apply the parametrization principle in designing this class of observer, the following corollary is objective.
Corollary 2. State observation error dynamics (40) entail the parameterizations of the strictly Metzler matrices
while the parameterizations (12) and (13) stay unchanged.
Provided that (25) is satisfied, then for all
Remark 6. Performing an inner adjustment for (38) as
respectively, and substituting (1) in (47) yields
and, if
4 Interval observers design
The design goals are Hurwitz stable matrices
Theorem 2. The matrices
Confirming the feasible task, the interval observer gain is given as
Proof. To respect the diagonal stabilization principle,
whose time-derivative for the observer error trajectory must satisfy
Applying in inequality (57) the observer error dynamics (37) gives the following:
Thus, constructing a common notation
then there is reasonable grounds to conclude that
where, for the covered systematization,
Therefore, the new form of LMI after applying the property of the Schur complement is
and, using (13) and 40, it can be set as
where the column vector l is used to uncover the diagonal matrix structures. Thus, (62) implies (50) and (53) when substituting
Separating h = 0 from (44) diagonal part and multiplying its left side by P yields
and using notation (64) then (65) implies (51). Analogously, it can be obtained when taking from (44) a component for h ≠ 0 and multiplying its left side by PLh (since LhLhT = In) that
and, using notation (64), then (66) implies (52).Analogously, all this can be carried out for the upper bound parameters. This concludes the proof.
5 Illustrative examples
In this section, two examples are presented to demonstrate the effectiveness of the interval observers design.
Example 1. To illustrate the proposed design principles, the stable interval ostensible strictly Metzler systems (1) and (2) are constructed on the matrices
To apply Theorem 2 conditions, the derived design parameters are selected as
and the related matrix structures are constructed from the system matrix bounds as follows:
Thus, using Σ and η = 0.005 yields for A°m that
Setting
Furthermore,
which are strictly Metzler, and their rhombic representations imply the diagonal matrices for the observer synthesis
whilst straightforward calculations give
Using LMIs defined by Theorem 2, the feasible matrix variables result in the non-negative gain matrix when applying the SeDuMi package (Peaucelle et al., 2002)
This infuses the strictly Metzler and Hurwitz matrices
where
Applying the same gain matrix to the ostensible Metzler matrices yields
It should be noted that the positions of the negative off-diagonal elements in
By simulating the response of the autonomous system with considered interval ostensible Metzler parameters to better illustrate the ostensible Metzler phenomena, the dynamics of the system were
the initial system state was set as q(0) = [ 0.5 7.5 0 ]T,
Figure 1 depicts the time responses of the first system state variable and its upper and lower estimations; Figure 2 shows the time responses for the third system state variable. Although the given system is not positive, it can be seen from Figures 1 and 2 that the behaviors of these state variables are correctly intervally estimated by the proposed interval observer if the components
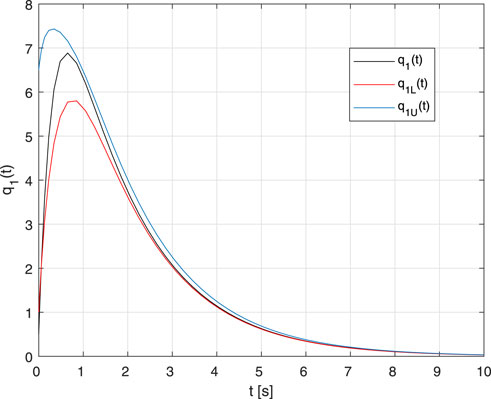
FIGURE 1. Estimation of the first state variable in the autonomous mode.
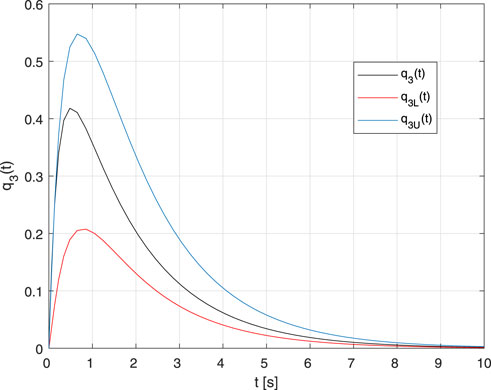
FIGURE 2. Estimation of the third state variable in the autonomous mode.
Moreover, considering the effect of the fixed uncompensated part with prescribed D-stability region related to
Example 2. To demonstrate the application validity of the suggested interval observer, the second example is presented on the linearized dynamic model of a U.S. Navy F-404 engine which powers the F/A-18 aircraft (Kwon et al., 1999). The corresponding dynamic model is a stable interval ostensible purely Metzler system (1), (2), written as
Since the interval matrices of the system are purely Metzler, due to the structure of their second column, it is advantageous if the measurement system corresponds the following matrix C
Applying analogously as the aforementioned conditions of Theorem 2, the resulting matrix representations are
where
Analogously constructing the diagonal matrices for the interval observer synthesis from the rhombic representations of the interval system matrices and for the used matrix C, the feasible matrix variables resulting from the conditions defined by Theorem 2 are
This infuses the strictly Metzler and Hurwitz matrices
where
Using these ostensible purely Metzler matrices results in stable, purely Metzler structures
By simulating the response of the observer in the forced mode, it is set as
Figure 3 depicts the time responses of the first system state variable and its upper and lower estimations; Figure 4 shows the time responses for the third system state variable. Although the given system is not positive, it can be seen from Figure 3 and Figure 4 that the behaviors of these state variables are correctly intervally estimated by the proposed interval observer.
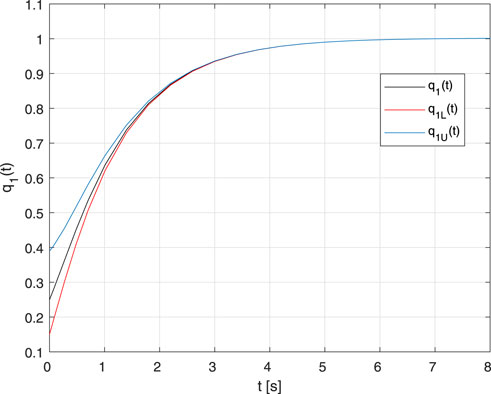
FIGURE 3. Estimation of the first state variable in the forced mode.
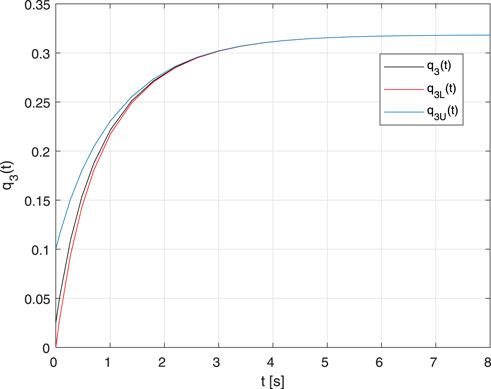
FIGURE 4. Estimation of the third state variable in the forced mode.
Note for both examples, since
6 Concluding remarks
This paper presents new results concerning the interval state estimation of intervally defined ostensible Metzler systems. It proposes how this problem can be formulated using a positive parametric representation and how a constructive procedure based on LMIs can be used respecting the diagonally stabilization principle. It is therefore proven that the gain matrix of the interval observer can be constructed for strict positivity when the stability of the interval observer is defined for a strictly Metzler approximation of the ostensible Metzler system matrix in combination with its stable complement, having a prescribed region of D-stability. The intention was to define the synthesis conditions based only on the quadratic Lyapunov function and to suppress the influence of disturbance in the state estimation by setting the upper bounds of the H∞ norm of its transfer function matrix. The proposed synthesis conditions are not singular, ensuring fast enough convergence of estimation errors, and do not require prior knowledge of the disturbance boundary. With a constant output matrix and the fact that only the upper and lower bounds of the system dynamics matrix are required, such interval observers have relatively high robustness to changes in system parameters. No comparable results in the field of interval estimators for systems with Metzler dynamics seem to have been published so far.
The use of the class of application models was strictly limited by the occurrence of the description of dynamics in the form of Metzler matrices, a class which also includes models of turbo engines applied in the field of networked aircraft fault tolerant control and diagnosis (Jin and Chen, 2014; Li et al., 2020). The goal of the idea was to derive a method for application in the context of interval observer-based methodology for aircraft engine diagnosis and fault-tolerant control (Lamouchi et al., 2022). It is still left as an open question.
This approach requires further theoretical investigation, especially if the considered continuous-time systems have ostensible Metzler system matrices that have a dominant number of negative and zero elements outside the main diagonal. Further research is thus envisaged on both theoretical and applied aspects in anti-disturbance tracking control for unmanned aerial vehicles and drones considering ostensible Metzler and Hurwitz model parameter setting (Yong, 2022; Song et al., 2023).
Data availability statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author contributions
AF elaborated the principles of the observer parameter synthesis and implemented their numerical validation. DK addressed the design and constraint principle assembling into a set of LMIs in design for ostensible Metzler continuous-time linear MIMO systems.
Funding
The research covering the work field presented in this paper was funded by VEGA, the Grant Agency of the Ministry of Education and Academy of Science of the Slovak Republic, under Grant No. 1/0483/21. This support is very gratefully acknowledged.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Ait Rami, M., and Tadeo, F. (2006). “Linear programming approach to impose positiveness in closed-loop and estimated states,” in Proceedings of the 17th international symposium on mathematical theory of networks and systems MTNS 2006, 2470–2477.
Anderson, J., and Murray, R. (2018). “Structured feedback optimization for Metzler dynamics,” in Proceedings of the 57th IEEE conference on decision and control CDC 2018, 4417–4424.
Berman, A., Neumann, M., and Stern, R. (1989). Nonnegative matrices in dynamic systems. New York: John Wiley and Sons.
Chambon, E., Apkarian, P., and Burlion, L. (2015). “Metzler matrix transform determination using a nonsmooth optimization technique with an application to interval observers,” in Proceedings of the SIAM conference on control and its applications CT 15, 205–211.
Efimov, D., Raïssi, T., Chebotarev, S., and Zolghadri, A. (2013). Interval state observer for nonlinear time varying systems. Automatica 49 (1), 200–205. doi:10.1016/j.automatica.2012.07.004
Farina, L., and Rinaldi, S. (2000). Positive linear systems. Theory and applications. New York: John Wiley and Sons.
Ganesan, K. (2007). On some properties of interval matrices. Int. J. Math. Comput. Sci. 1 (1), 35–42.
Gao, H., Lam, J., Wang, C., and Xu, S. (2005). Control for stability and positivity. Equivalent conditions and computation. IEEE Trans. Circuits Syst. II. Express Briefs 52 (9), 540–544. doi:10.1109/tcsii.2005.850525
Guo, Z., Henry, D., Guo, J., Wang, Z., Cieslak, J., and Chang, J. (2020). Metzler matrix-based switching control scheme for linear systems with prescribed performance guarantees. IFAC-PapersOnLine 53 (2), 6428–6433. doi:10.1016/j.ifacol.2020.12.1784
Huong, D. (2022). Secure interval estimations for time-varying delay interconnected systems using novel distributed functional observers. Int. J. Adapt. Control Signal Process. 36, 1373–1393. doi:10.1002/acs.3400
Ito, H., and Dinh, T. D. (2020). Asymptotic and tracking guarantees in interval observer design for systems with unmeasured polytopic nonlinearities. IFAC-PapersOnLine 53 (2), 5010–5015. doi:10.1016/j.ifacol.2020.12.1099
Jaulin, L., Kieffer, M., Didrit, O., and Walter, E. (2001). “Applied interval analysis with examples in parameter and state estimation,” in Robust control and robotics (London: Springer-Verlag).
Jin, Y., and Chen, W. (2014). “Robust fault detection and estimation for turbofan engines subject to adaptive controllers via observer and ToMFIR techniques,” in Proceedings of the 9th IEEE conference on industrial electronics and applications, 672–677.
Khan, A., Xie, W., Zhang, L., and Liu, L. W. (2020). Design and applications of interval observers for uncertain dynamical systems. IET Circuits, Devices Syst. 14, 721–740. doi:10.1049/iet-cds.2020.0004
Krokavec, D., and Filasová, A. (2020a). “Control design for linear strictly Metzlerian descriptor systems,” in Proceedings of the 18th European control conference ECC 2020, 2092–2097.
Krokavec, D., and Filasová, A. (2020b). “Interval observer design for uncertain linear continuous-time Metzlerian systems,” in Proceedings of the 28th mediterranean conference on control and automation MED 2020, 15–18.
Krokavec, D., and Filasová, A. (2018). “LMI based principles in strictly Metzlerian systems control design,” in Mathematical problems in engineering 2018, 1–14. doi:10.1155/2018/9590253
Krokavec, D., and Filasová, A. (2022). “State control of linear systems with potentially Metzler dynamics,” in CONTROLO 2022, lecture notes in electrical engineering. Editors L. B. Palma, R. Neves-Silva, and L. Gomes (Cham: Springer Nature), Vol. 930, 689–701.
Kwon, W. H., Kim, P. S., and Park, P. G. (1999). A receding horizon Kalman FIR filter for linear continuous-time systems. IEEE Trans. Automatic Control 44 (11), 2115–2120. doi:10.1109/9.802927
Lamouchi, R., Raissi, T., Amairi, M., and Aoun, M. (2022). Interval observer-based methodology for passive fault tolerant control of linear parameter-varying systems. Trans. Inst. Meas. Control 44 (5), 986–999. doi:10.1177/01423312211040370
Li, D., Chang, J., and Chen, W. (2022). Event-triggered controller design for LTI systems. A distributed interval observer-based approach. ISA Trans. 131, 146–159. doi:10.1016/j.isatra.2022.04.049
Li, T., Tang, X., Ge, J., and Fei, S. (2020). Event-based fault-tolerant control for networked control systems applied to aircraft engine system. Inf. Sci. 512, 1063–1077. doi:10.1016/j.ins.2019.10.039
Liu, L. J., Zhao, X., Sun, X. M., and Wang, W. (2017). “New approaches to positive observer design of linear positive systems,” in Proceedings of the 2017 Chinese automation congress CAC 2017, 7195–7198.
Liu, X., Xia, Y., and Xi, H. (2011). “Estimating adverse selection and moral hazard effects with hospital invoices data in a government-controlled healthcare system,” in Proceedings of the international conference on electronics, communications and control ICECC 21, 883–901. doi:10.1002/hec.1756
Luenberger, D. G. (1971). An introduction to observers. IEEE Trans. Automatic Control 16 (6), 596–602. doi:10.1109/tac.1971.1099826
Mason, O. (2012). Diagonal Riccati stability and positive time-delay systems. Syst. Control Lett. 61 (1), 6–10. doi:10.1016/j.sysconle.2011.09.022
Mazenc, F., and Bernard, O. (2011). Interval observers for linear time-invariant systems with disturbances. Automatica 47 (1), 140–147. doi:10.1016/j.automatica.2010.10.019
Mazenc, F., and Bernard, O. (2014). ISS interval observers for nonlinear systems transformed into triangular systems. Int. J. Robust Nonlinear Control 24, 1241–1261. doi:10.1002/rnc.2937
Moisan, M., Bernard, O., and Gouzé, J. L. (2009). Near optimal interval observers bundle for uncertain bioreactors. Automatica 45 (1), 291–295. doi:10.1016/j.automatica.2008.07.006
Peaucelle, D., Henrion, D., Labit, Y., and Taitz, K. (2002). User’s Guide for SeDuMi interface 1.04 (toulouse. LAAS-CNRS.
Raïssi, T., and Efimov, D. (2018). Some recent results on the design and implementation of interval observers for uncertain systems. Automatisierungstechnik 66 (3), 213–224. doi:10.1515/auto-2017-0081
Shorten, R., Mason, O., and King, C. (2009). An alternative proof of the Barker, Berman, Plemmons (BBP) result on diagonal stability and extensions. Linear Algebra its Appl. 430 (1), 34–40. doi:10.1016/j.laa.2008.06.037
Shu, Z., Lam, J., Gao, H., Du, B., and Wu, L. (2008). Positive observers and dynamic output-feedback controllers for interval positive linear systems. IEEE Trans. Circuits Syst. I. Regul. Pap. 55 (10), 3209–3222. doi:10.1109/tcsi.2008.924116
Smith, H. L. (1995). Monotone dynamical systems. An introduction to the theory of competitive and cooperative systems. Providence: American Mathematical Society.
Son, N. K., and Hinrichsen, D. (1996). Robust stability of positive continuous time systems. Numer. Funct. Analysis Optim. 17 (5-6), 649–659. doi:10.1080/01630569608816716
Song, Y., Yong, K., and Wang, X. (2023). Disturbance interval observer-based robust constrained control for unmanned aerial vehicle path following. Drones 7, 90. doi:10.3390/drones7020090
Tanaka, T., and Langbort, C. (2011). The bounded real lemma for internally positive systems and H-infinity structured static state feedback. IEEE Trans. Automatic Control 56 (9), 2218–2223. doi:10.1109/tac.2011.2157394
Wang T, T., Li, Y., and Xiang, W. (2022). Design of interval observer for continuous linear large-scale systems with disturbance attenuation. J. Frankl. Inst. 359 (8), 3910–3929. doi:10.1016/j.jfranklin.2022.03.014
Wang, X., Jiang, G. P., Yang, W., Su, H., and Wang, X. (2020). Neighborhood interval observer based coordination control for multi-agent systems with disturbances. IFAC-PapersOnLine 53 (2), 10994–10999. doi:10.1016/j.ifacol.2020.12.023
Wang, X. L., Luo, H., Zhao, J., and Yin, Q. (2022). Consensus of time-varying interval uncertain multiagent systems via reduced-order neighborhood interval observer. Complexity 2022, 1–14. doi:10.1155/2022/5800097
Yong, K., Chen, M., Shi, Y., and Wu, Q. (2020). Hybrid estimation strategy-based anti-disturbance control for nonlinear systems. IEEE Trans. Automatic Control 66 (10), 4910–4917. doi:10.1109/tac.2020.3043998
Yong, K. (2022). Disturbance interval observer-based carrier landing control of unmanned aerial vehicles using prescribed performance. Sci. Sin. Inf. 52 (9), 1711–1726.
Keywords: Metzler systems, parametric constraints, diagonal stabilization, linear matrix inequalities, applied interval analysis, interval observers
Citation: Krokavec D and Filasová A (2023) Interval observers design for systems with ostensible Metzler system matrices. Front. Aerosp. Eng. 2:1158718. doi: 10.3389/fpace.2023.1158718
Received: 04 February 2023; Accepted: 17 April 2023;
Published: 10 May 2023.
Edited by:
Robert Fonod, Swiss Federal Institute of Technology Lausanne, SwitzerlandReviewed by:
Shuyi Shao, Nanjing University of Aeronautics and Astronautics, ChinaXiaodong Shao, Beihang University, China
Copyright © 2023 Krokavec and Filasová. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Dušan Krokavec, ZHVzYW4ua3Jva2F2ZWNAdHVrZS5zaw==