 Joshua S. Umansky-Castro
Joshua S. Umansky-Castro Kimberly G. Yap
Kimberly G. Yap Mason A. Peck
Mason A. Peck- Space Systems Design Studio, Department of Mechanical and Aerospace Engineering, Cornell University, Ithaca, NY, United States
This paper presents an orbit-to-ground model for the atmospheric entry of ChipSats, gram-scale spacecraft that offer unique advantages over their conventionally larger counterparts. ChipSats may prove particularly useful for in-situ measurements in the upper atmosphere, where spatially and temporally varying phenomena are especially difficult to characterize. Globally distributed ChipSats would enable datasets of unprecedented detail, assuming they could survive. The model presented is used to assess the survival and dispersion of a swarm of ChipSats when deployed over the Earth, Moon, Mars, and Titan. These planetary exploration case studies focus on the Monarch, the newest-generation ChipSat developed at Cornell University, in order to evaluate technology readiness for such missions. A parametric study is then conducted to inform future ChipSat design, highlighting the role of the ballistic coefficient in both peak entry temperature and mission duration.
1 Introduction
The advent of gram-scale ChipSat (satellite-on-a-chip) technology enables an unprecedented kind of space exploration. Spacecraft to date have traditionally taken a high-cost-for-low-risk approach. While this design methodology has certainly worked well, the conservative nature limits the types of missions selected. And when failures do occur, the consequences are substantial. Take for example the Mars Climate Orbiter, the demise of which cost $327.6 million (JPL, 2012). ChipSats are at the other end of the spectrum. With low-mass and low-cost spacecraft assembled from commercial-off-the-shelf (COTS) components, the individual losses, including launch costs, are negligible. Mission success is therefore determined by the survival of only a portion of the swarm. This newfound statistical approach to mission assurance opens the doors to spatially distributed in-situ measurements, as well as operations that pose extremely high risk to individual spacecraft (Adams and Peck, 2019). Surviving atmospheric entry to accomplish in-situ sensing of planetary bodies lies at the intersection of these two mission types.
ChipSats therefore fill a critical void in our capabilities for solar system exploration. An orbiter could deploy a swarm of these dispensable spacecraft into the upper atmosphere of planetary bodies, or eject them into landing trajectories for asteroids or moons with no atmosphere at all. A comprehensive dataset of both atmospheric and surface conditions can be obtained during the descent. The low-power transmitters on board the ChipSats would be sufficient to reach the deployer, which serves as a relay for transmissions back to Earth. ChipSats have already been demonstrated in the space environment (Tavares, 2019). The outlying question is whether these gram-scale spacecraft are equipped for the goals of in-situ measurement, and the extreme environment associated with such missions.
This paper presents a dynamics and thermal model for the ChipSat atmospheric entry problem. The model is then applied to several celestial bodies—Earth, Mars, Titan, and the Moon—in an effort to assess the challenges encountered and mission characteristics associated with a range of atmospheres. In particular, these case studies center on the feasibility of employing the current state-of-the-art ChipSat, the Monarch, to assess technology readiness. Finally, a parametric study is used to apply this model to a wider scope, in order to inform future ChipSat designs for such missions.
2 Motivation
The advantage of in-situ sensing is clear. The atmosphere and magnetic field of planetary bodies are in constant flux. Full characterization of the various layers would ideally involve the ability to measure everywhere, all the time. This goal cannot be achieved from orbiters alone. Even a dense constellation of orbiting satellites would rely on remote sensing, with local measurements available at only a safe orbital altitude. ChipSats bring us a step closer to an ideal dataset. They could traverse the region of interest, passing information to ground or an orbiter to create a highly detailed dataset of spatially and temporally varying phenomena. Two immediate questions that arise concern survival and dispersion. Could ChipSats remain operational throughout the extreme conditions associated with atmospheric entry? If so, would they disperse far enough during deorbit to achieve a meaningfully distributed dataset?
To address these questions a ChipSat entry model is needed, one that is specifically tailored to the unique dynamics exhibited by spacecraft of this scale. Both survivability and dispersion are tied to the ballistic coefficient,
Here, m is the mass of the ChipSat,
The model presented draws from analysis of the survival of small fragments, such as screws, during atmospheric entry (Koppenwallner et al., 2001). It builds upon the work of Justin Atchison (Atchison et al., 2010), adding three-dimensional orbital dynamics and a Monte Carlo simulation to address the dispersion question, and generalizing the calculations for use on other celestial bodies. Whereas Atchison’s earlier work focused on a
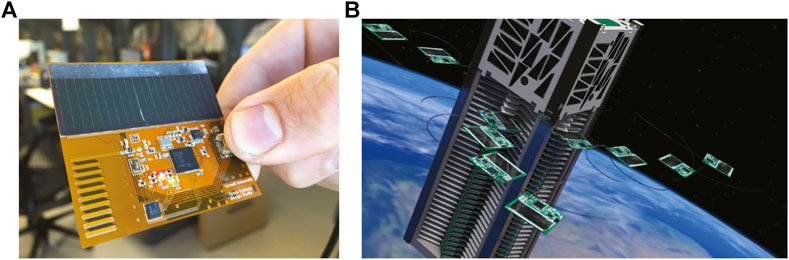
FIGURE 1. ChipSat and associated deployment concept. (A) Monarch ChipSat developed at Cornell University, (B) Artistic rendering of KickSat deployment phase [Image courtesy of Ben Bishop].
Through the methods described in this paper, we assess the Monarch’s suitability for planetary exploration missions in its current state and identify needed technology advancements.
3 Methods
3.1 Dynamics Model
3.1.1 Orbital Mechanics
The proposed model uses Cartesian coordinates in a planet-centered inertial frame. The position of a ChipSat,
The equations of motion for the orbit are derived from a simplified geopotential model that ignores tesseral and sectorial effects. Only
where
The
Introducing the Lagrangian,
and defining the kinetic energy,
the equation of motion is solved for via the Euler-Lagrange equation.
3.1.2 Aerodynamic Forces and Attitude Dynamics
While the dynamics of gram-scale spacecraft can become uniquely driven by the Lorentz force and solar pressure at higher altitude (Atchison and Peck, 2011), drag is the primary perturbing force in lower orbits. The drag force can be modeled according to
where
The velocity vector
The drag coefficient and the effective area are both key parameters that determine the survivability of a planetary entry mission.
It is well understood that blunt bodies prove advantageous for atmospheric entry. At high velocities, a normal shock is detached from these geometries by an air cushion that forms ahead of the body. Such bow shocks dissipate 90 percent of the friction heat (Allen and Eggers, 1958). The theory explaining this was proposed by Julian Allen in the 1950s, and shaped the design of the Mercury capsule and many spacecraft thereafter.
A ChipSat oriented face-on to the incoming flow provides a more blunt shape than does an edge-on or tumbling ChipSat. Minimizing erothermal heating is a central goal for the proposed mission type. So, designing a ChipSat that can maintain this orientation is key. The effective area is therefore the cross-sectional area
where L is the side length of a square ChipSat. The face-on orientation also has a higher drag coefficient, which similarly works to the ChipSat’s advantage. Greater drag results in faster, and therefore earlier, deceleration. More of this deceleration occurs at higher altitudes where the atmosphere is less dense, thereby reducing the heat load.
In low Earth orbit, where the spacecraft is in the free molecular flow regime, the drag coefficient is modeled by (Storch, 2002)
Here, the angle of attack
where R is the universal gas constant,
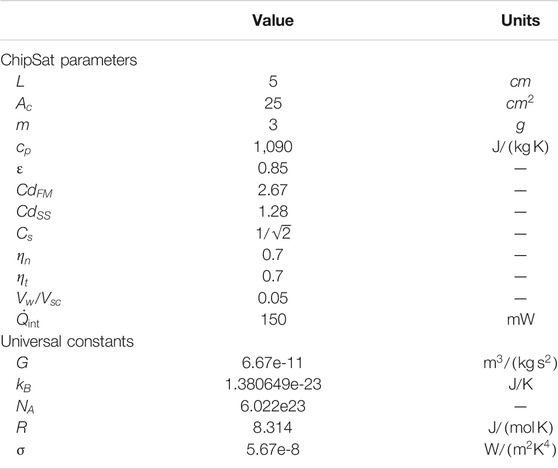
TABLE 1. Simulation constants.
For sufficiently low ballistic coefficients, peak heating may occur while the spacecraft is still in the free molecular flow regime. A
Supersonic and hypersonic drag coefficients, however, are very challenging to model. Experimental and computational work has shown that the drag coefficient depends on both flow parameters and wall temperature effects (Anderson, 2000). Due to the nature of the ChipSat’s low mass and ballistic coefficient, the decrease in
where
Once the ChipSats are in the subsonic flow regime, their angle of attack is no longer critical to survival. Lift coefficients and force can therefore be considered as well. While maneuverable control surfaces on future generations of ChipSats is a possibility, this model describes spacecraft that remain oriented to the oncoming flow, through passive means. As a result, the ChipSats are modeled as drag-only throughout the entire duration of the descent, and equations of motion for ChipSat attitude are not explicitly included. It should be noted that this model also does not consider wind effects. While a wind model would certainly aid in the dispersion, this study seeks to generalize landing distribution predictions for cases where the wind patterns of the target planetary body may not be well understood. Swarm dispersion is therefore accomplished from drag alone, as a limiting case.
With the drag force established and separated into components, the complete translational equations of motion in Cartesian coordinates are
3.2 Thermal Model
The heating model employed for ChipSat deorbit and entry considers both convection and radiation. Heat radiated outward from a spacecraft at temperature
Here, σ is the Stefan-Boltzmann constant, and ε is the emissivity of the spacecraft material. A value of 0.85 reflects the Monarch design, which features a Kapton substrate. As heat can dissipate from both sides of the spacecraft, the surface area for this calculation is simply
It should be acknowledged that using
While in orbit, aerothermal heating is negligible. The spacecraft equilibrium temperature is determined from radiation and internal heat,
Drag eventually drives the spacecraft’s orbit down to the upper atmosphere, where convection comes into play. Aerodynamic heating is modeled by
where
where the flow regimes are determined by the Knudsen number
where
where γ is the isentropic expansion factor, and
Additionally, dynamic viscosity can be expressed as a function of temperature according to Sutherland’s law (White, 2006)
where
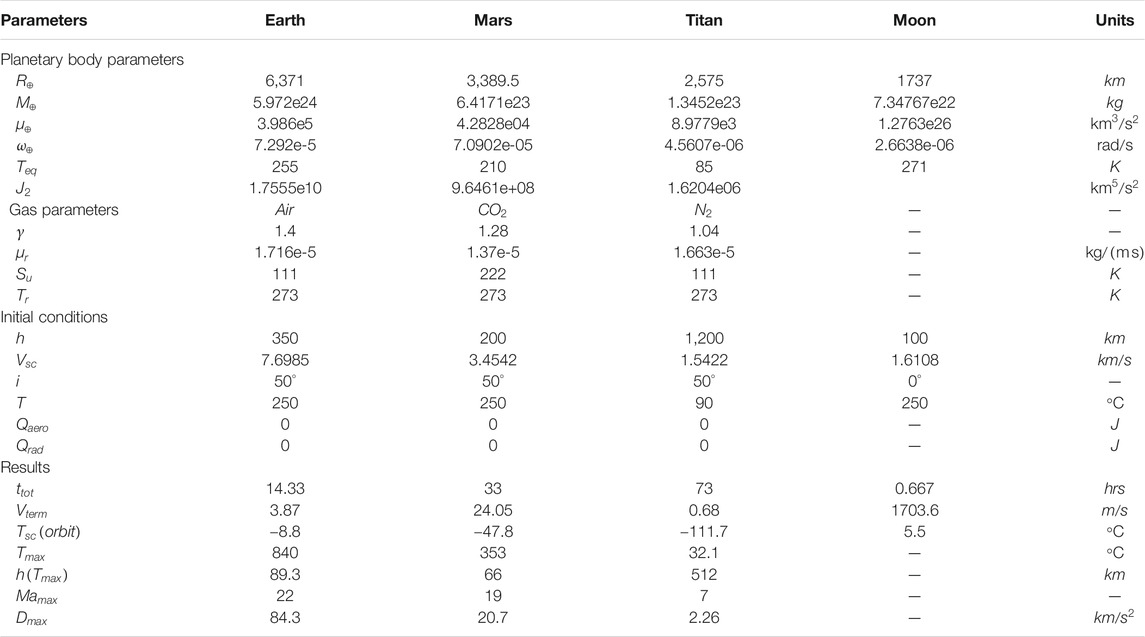
TABLE 2. Planetary entry simulation parameters and results.
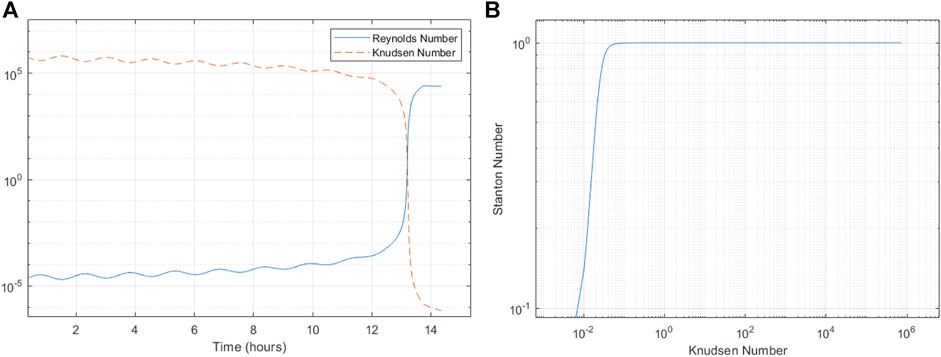
FIGURE 2. Relation between flow characterization parameters, (A) time-histories of Reynolds number and Knudsen number for Monarch ChipSat Earth entry, (B) Stanton number vs. Knudsen number.
Returning to Eq. 20c, isentropic flow is assumed. This assumption permits the use of algebraic expressions that relate properties behind the shock to the gas stagnation conditions upstream of the shock (Forney et al., 1987). The local Reynolds number
where
where
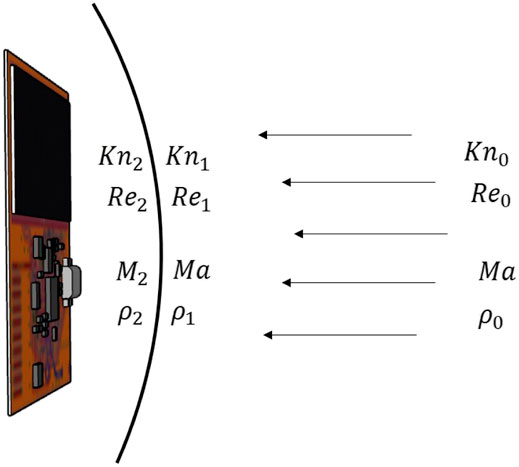
FIGURE 3. Flow parameters for a detached bow shock, (0) gas stagnation conditions upstream of the shock, (1) gas properties near the shock front, (2) gas properties immediately after the shock. Mach number remains constant ahead of the shock [ChipSat CAD model courtesy of Andrew Filo].
With the Stanton number established for hypersonic continuum flow, it is now possible to model aerodynamic heating across all flow regimes in order to predict peak reentry temperatures. The following first order differential equation is used to solve for ChipSat temperature
where
4 Case Studies
With the proposed aerothermal model, four simulations were carried out to assess the landing distribution and potential for survival of the Monarch ChipSat. The planetary bodies selected are Earth, Mars as a representation of planets with thinner atmospheres, Titan to represent celestial bodies with thicker atmospheres, and lastly the Moon as a reference point that reflects bodies with no atmosphere. In each case, the initial conditions assume deployment from an orbiter. This deployer could be a CubeSat, such as those used in the KickSat missions, that stores the ChipSats in a stacked configuration to radially eject. Figure 1B illustrates this concept.
100 Monarch ChipSats are deployed in a Monte Carlo simulation for each case study. Their initial position is randomized by a Gaussian distribution to reflect their placement within their stack in a 3U CubeSat. The initial velocity of each ChipSat includes an ejection velocity of
Equation 33 is simply the expression for the velocity of a circular orbit and is determined by the deployment altitude
4.1 Earth
The simulation commences in low Earth orbit, with an initial altitude of
The temperature and density model is shown in Figure 4.
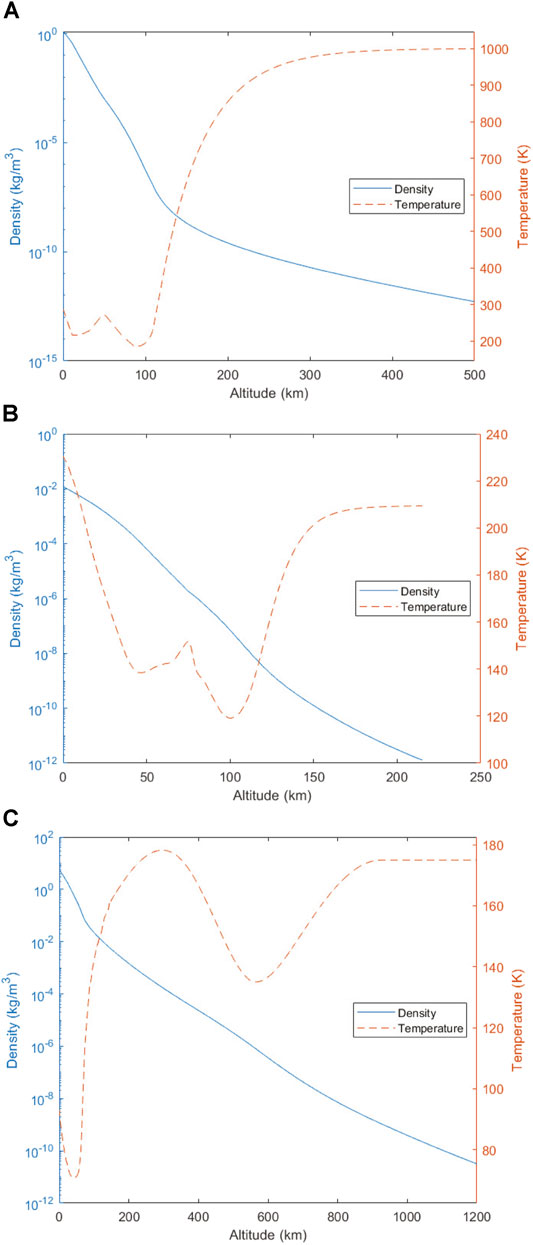
FIGURE 4. Density and temperature models for ChipSat atmospheric entry simulations, (A) Earth (US Standard Atmosphere, 1976), (B) Mars (Mars-GRAM 2010), (C) Titan (Yelle Model).
Figure 5A displays the descent from orbit and the temperature spike for a single ChipSat. In this simulation, the mean values are used for area and mass, and no height randomization or deployment kick is given. In orbit, the Monarch settles on an equilibrium temperature of −8.8°C and reaches a peak temperature of 840°C upon entry at an altitude of
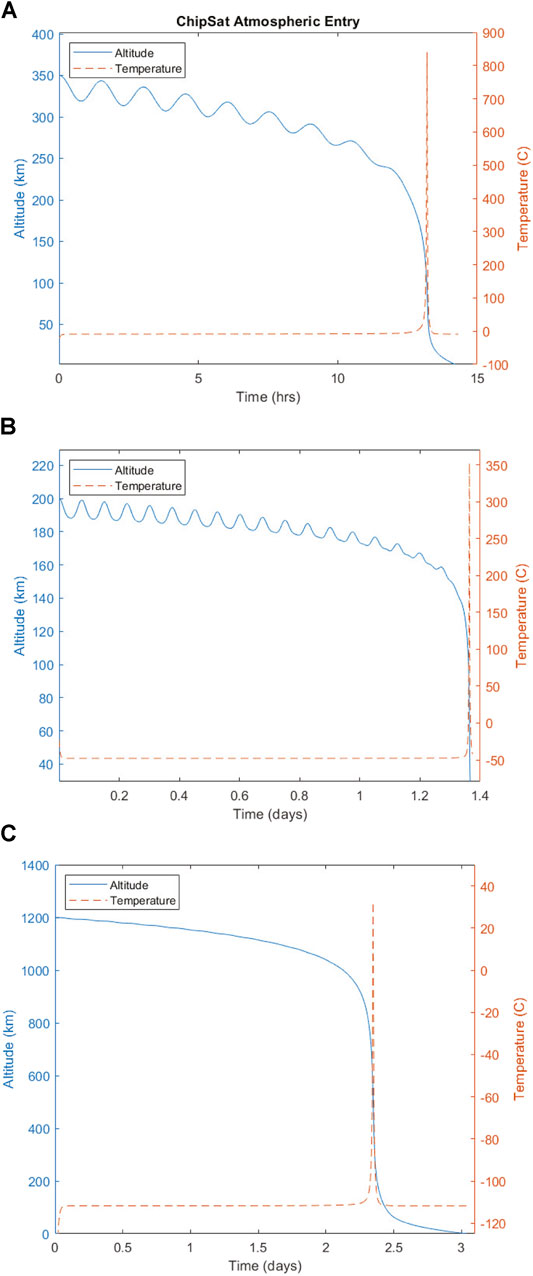
FIGURE 5. Altitude and temperature time-histories of face-on atmospheric entry of Monarch ChipSat, (A) Earth, (B) Mars, (C) Titan.
Figure 6A provides a close up of the temperature spike with the local Mach number overlaid. The maximum value of Mach 22 occurs approximately 1 minute before the peak temperature. The subsequent and rapid drop of both values coincide as the ChipSat reaches terminal velocity within minutes. Figure 7A conveys the change in flight-path angle ϕ during this deceleration. Within 3 minutes of reaching a peak drag of
where density is a function of altitude, h, which is set to zero for the landing case, and the subsonic value of 1.28 is attributed to
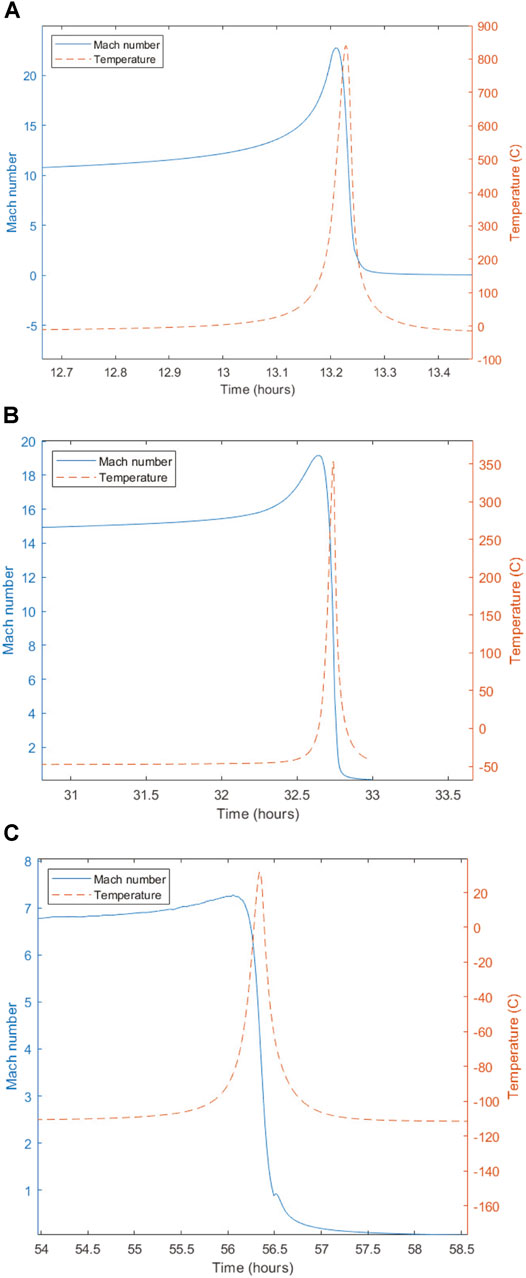
FIGURE 6. Mach number and temperature time-histories of face-on atmospheric entry of Monarch ChipSat, (A) Earth, (B) Mars, (C) Titan.
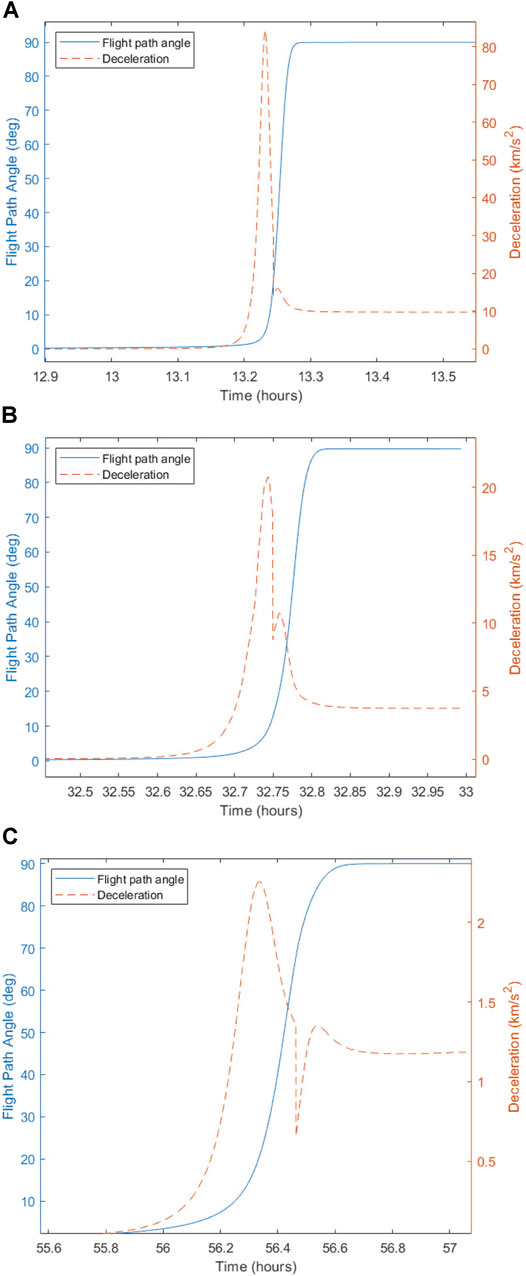
FIGURE 7. Flight path angle, ϕ, and drag deceleration time-histories of face-on atmospheric entry of Monarch ChipSat, (A) Earth, (B) Mars, (C) Titan.
The results of the Monte Carlo simulation are shown in Figures 8A, 9A. The radial deployment and small perturbations in ChipSat mass and area are sufficient to achieve staggered deorbit times, resulting in a global distribution. As this model does not consider wind effects, the landing locations of the ChipSats are aligned according to the inclination of the original orbit. The small deviances are solely from the initial deployment direction. Global wind models, although computationally expensive, would augment the scattering from the ground track of the deployer spacecraft if implemented.
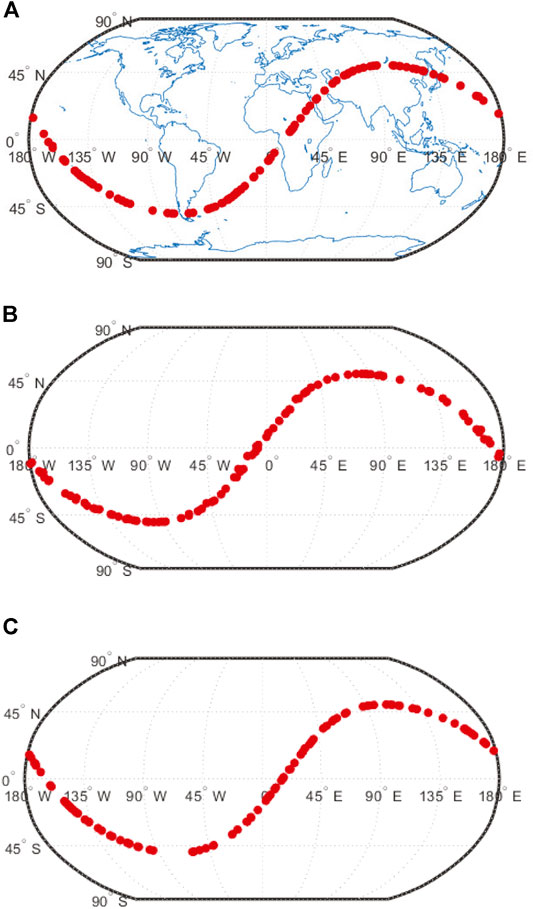
FIGURE 8. Landing locations for Monte Carlo simulation of Monarch ChipSat atmospheric entry, 50
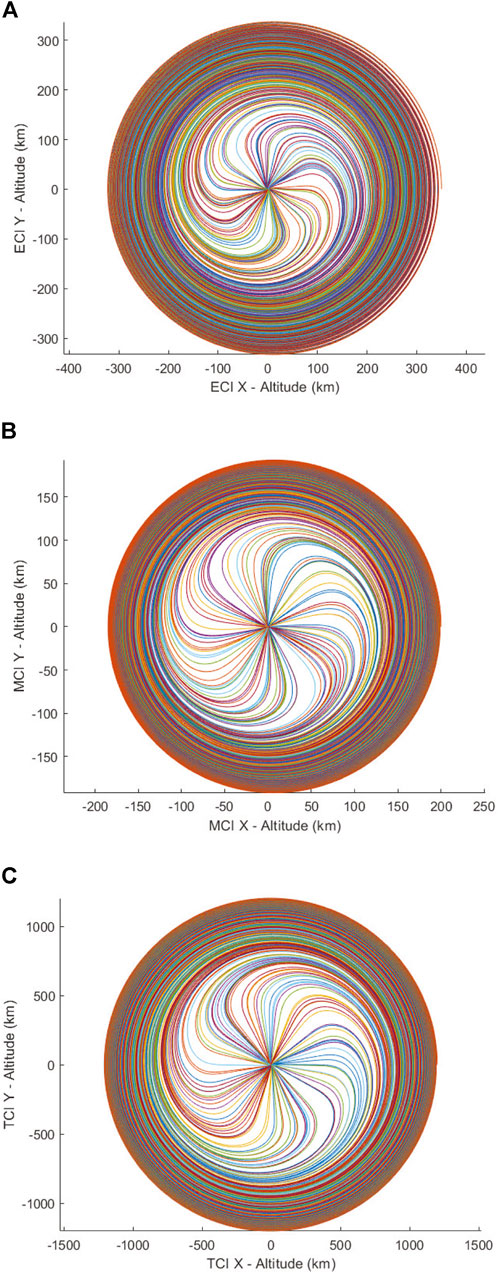
FIGURE 9. Deorbit trajectories for Monte Carlo simulation of Monarch ChipSat atmospheric entry, equatorial orbit. (A) Earth, (B) Mars, (C) Titan.
4.2 Mars
Due to the thinner atmosphere, deorbit simulations on Mars are initiated at a
Figure 5B displays the descent from orbit and the temperature spike for a single ChipSat with no randomization of parameters. In orbit, the Monarch settles on an equilibrium temperature of −47.8°C and reaches a peak temperature of 353°C upon entry at an altitude of
Figure 6B shows that the maximum value of Mach 19 occurs approximately 6 minutes before the peak temperature, which occurs at the same time as the peak drag of
The results of the Monte Carlo simulation are shown in Figures 8B, 9B. The radial deployment and small perturbations in ChipSat mass and area are again sufficient to achieve staggered deorbit times, resulting in a global distribution. As this model does not consider wind effects, the landing locations of the ChipSats are also only slightly deviated from the ground track of the original orbit.
4.3 Titan
With its dense atmosphere, maintaining orbit around Titan requires significantly higher altitudes. Deorbit simulations are initiated at a
Figure 5C displays the descent from orbit and the temperature spike for a single ChipSat with no randomization of parameters. In orbit, the Monarch settles on an equilibrium temperature of −111.7°C and reaches a peak temperature of 32.1°C upon entry at an altitude of
Figure 6C provides a close up of the temperature spike with the local Mach number overlaid. The maximum value of Mach 7 occurs approximately 17 minutes before the peak temperature, which corresponds to the peak in deceleration due to drag. From Figure 7C it is shown that within 19 minutes of peak drag of
The results of the Monte Carlo simulation are shown in Figures 8C, 9C. The radial deployment and small perturbations in ChipSat mass and area are once again sufficient to achieve staggered deorbit times, resulting in a global distribution. As this model also does not consider wind effects, the landing locations of the ChipSats only slightly deviate from the ground track of the original orbit. Given the extended descent at terminal velocity, which begins at
4.4 Moon
For comparison, we examine the case of no atmosphere with a ChipSat deployment on the Moon. Without drag, sufficient deceleration for deorbit must be imparted during deployment. All dispersion of the swarm also comes from varied initial conditions during ejection from the deployer. In this scenario, a mothership in a
where a is the orbit semi-major axis. The landing trajectory is an elliptical orbit with apoapsis at the
This change in velocity may be achieved from a cold-gas thruster or a spring-loaded mechanism that pushes the deployer in retrograde from the mothership. Once separated and traveling at the desired velocity, the deployer then radially ejects the ChipSats at
The results of the lunar deployment are shown in Figure 10. Fluctuations in solar exposure are once again neglected, resulting in a constant spacecraft equilibrium temperature of
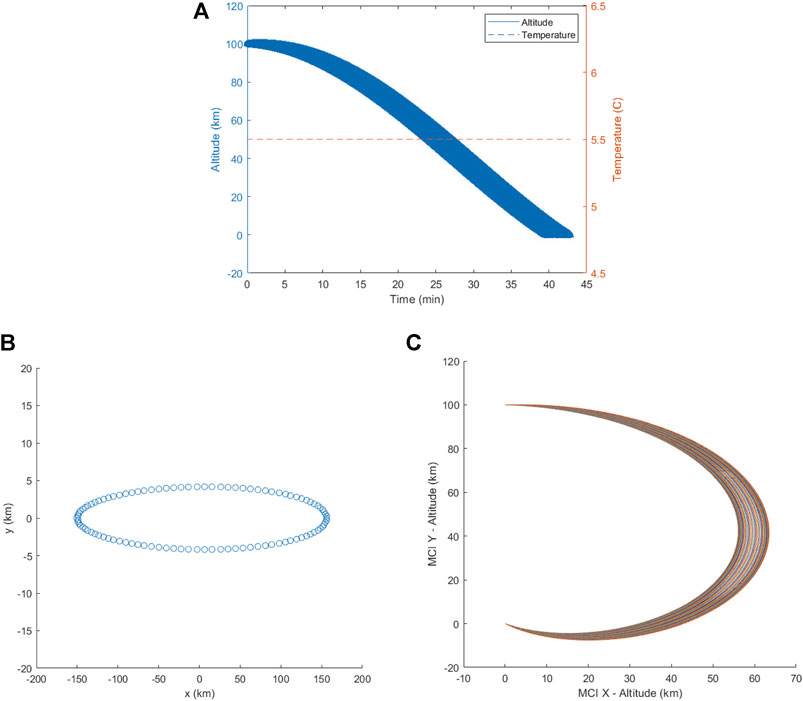
FIGURE 10. Monarch ChipSat lunar landing case study, (A) altitude and temperature time-history, (B) landing ellipse, (C) swarm trajectories.
This landing velocity is significantly higher than the terminal velocities encountered for planetary bodies with atmospheres. The greatest risk to the ChipSat’s survival during such a mission becomes its impact with the surface, followed by radiation. Both of these factors have been investigated by research at Cornell. In 2017, Hunter Adams conducted a durability study in which 12 FR-4 based ChipSats were exposed to accelerations ranging from 5,000 to 27,0000 g’s via an elastically loaded drop table (Adams and Peck, 2019). The ChipSats were placed on lunar regolith simulant to resemble impact with the Moon’s surface. Sensor readings from the most sensitive component on board, the IMU, were used as metric for survival. Measurements were taken after each impact, and each sensor continued to perform within manufacturer specifications. Here, the ChipSat’s scale once again proves advantageous. Smaller objects exhibit higher natural structural frequencies and approach continuous materials like crystals, making them less susceptible to high strain and crack propagation and therefore more capable of withstanding shock.
Regarding long-term survival of these minimalist COTS-based spacecraft, an experiment was conducted in 2011 in which three early-prototype ChipSats were brought to the ISS on board STS-134 (Manchester and Peck, 2011). They were mounted outside the space station as part of the MISSE-8 experimental pallet, where they were exposed to extreme temperatures, vacuum, and radiation for a period of three years. When retrieved in 2014, two of the three ChipSats were fully operational and the third showed partial functionality. While both of these experiments offer some insight into the survival statistics, no specific ChipSat can be guaranteed to survive. Nevertheless, these experiments do suggest a non-zero probability of success for a swarm of ChipSats. Mission assurance for ChipSats is statistical in nature. Like many R-selected species, survival is based on numbers. This is a stark contrast to the high-cost-for-low-risk approach for traditional spacecraft. The experiments conducted thus far therefore present strong evidence that a portion of deployed ChipSats would survive impact with celestial bodies and subsequently operate for the long term in the space environment.
5 Parametric Study
5.1 Role of the Ballistic Coefficient
Returning to the set up of the batch simulations, the four randomized factors are deployment direction, height within the deployer, mass, and area. Figures 11A,B present histograms for peak temperature and deorbit time in the Earth entry simulation. Both histograms resemble Gaussian distributions, reflecting the randomization used on the initial conditions. Peak entry temperatures have a mean value of 841°C with a standard deviation of 8.653°C. Deorbit times have a mean of 14.4 h with a standard deviation of 23.4 min. In an effort to correlate the distribution of temperatures and deorbit times to the variation in initial conditions, we revisit the ballistic coefficient.
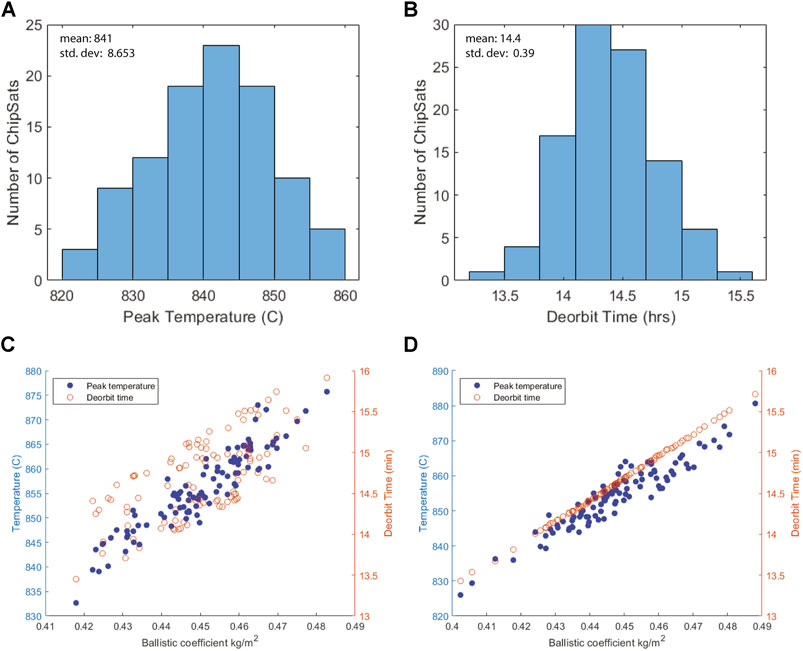
FIGURE 11. Correlation between peak temperature/deorbit time and ballistic coefficient, β, for Monarch ChipSat Earth entry Monte Carlo simulation, (A) Histogram of peak temperatures, (B) Histogram of deorbit times, (C) peak temperature and deorbit time vs. β for randomized deployment conditions, (D) peak temperature and deorbit time vs. β for identical initial deployment.
Figure 11C plots both variables with respect to the ballistic coefficient, β, presenting a strong positive correlation. To hone in on the dependence on β, the 100 ChipSat simulation is run again, but this time with identical deployment height, and no radial kick. With small variations only in mass and area, there is a much cleaner positive correlation shown in Figure 11D. This is especially true for deorbit time, which now appears almost perfectly linear.
5.2 Parametric Search
These correlations emerging for small perturbations in the Monarch’s ballistic coefficient motivate widening the scope. A parametric study is conducted for the Earth entry case. 400 simulations are run in which ChipSat mass is incremented from 1 mg to 8 g, and side length is incremented from
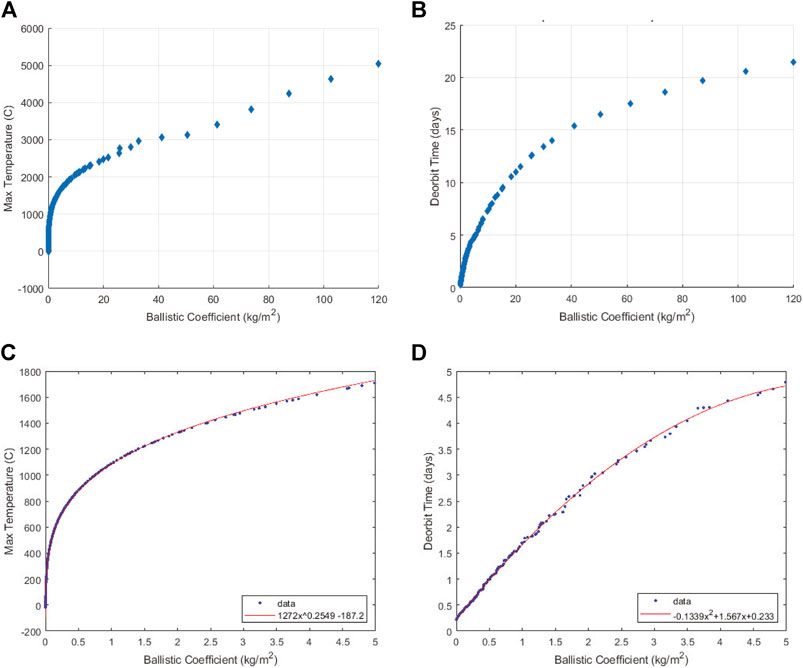
FIGURE 12. Correlation between peak temperature/deorbit time and ballistic coefficient, β, for parametric study of ChipSat Earth entry, (A) peak temperature vs. β, (B) deorbit time vs. β, (C) peak temperature curve fitting for low β, (D) deorbit time curve fitting for low β
For both peak temperature and time to ground, there is a strong, although non-linear, correlation with ballistic coefficient. This relation is more clearly defined for lower β values, a subset that contains all ChipSats developed thus far. Figures 12C,D provide a closer look at ballistic coefficients below
5.3 Future ChipSat Design
Figure 13 provides an alternative visualization for peak temperatures to assist with design decisions. The Monarch with its peak temperature of 840°C is indicated by a red dot for reference. If planning a ChipSat mission for in-situ atmospheric sensing, ChipSat designers must be conscious of the need to maximize the surface area to mass ratio. Simply assembling the Monarch on a Kapton board that is double the side length would drop peak temperatures by 300°. While decelerating higher in the atmosphere improves chances for survival, it also shortens the time in orbit. Quadrupling the area in this case would result in a 32
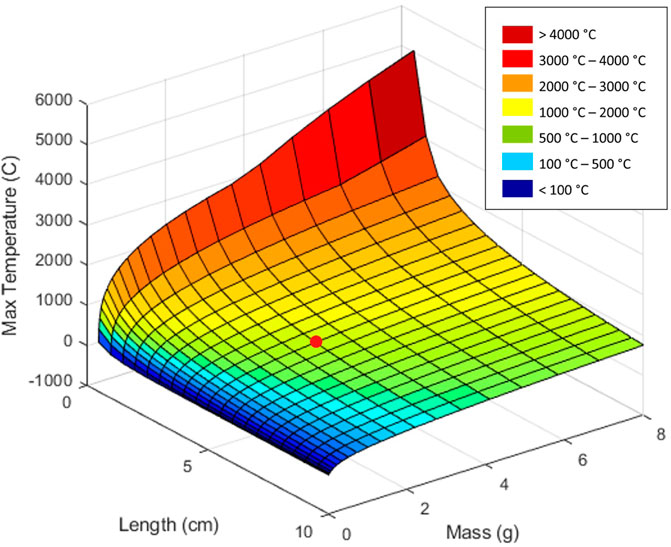
FIGURE 13. Parametric analysis of ChipSat Earth entry, with Monarch indicated by red dot for reference.
A mission ConOps such as this would take advantage of the larger area when it is needed most. However, adjusting the ballistic coefficient alone may not be enough. As a start, swapping the on-board electronics for military-grade IC’s would increase the maximum operating temperature from
6 Conclusion
ChipSats enable a new kind of exploration. Planetary entry missions for distributed in-situ sensing—both on the ground and in the atmosphere—can now be designed with a low-cost-high-risk approach. The model presented demonstrates that while a swarm of Monarchs may have difficulty surviving entry back to Earth, they stand a better chance in both the thinner atmosphere of Mars, and the thicker atmosphere of Titan. Given the advantages of their scale and the lack of thermal concerns in the no-atmosphere case, the Monarchs may even fare well during a high-velocity impact on the Moon. With an understanding of the methods developed, one can engineer the ChipSat to meet the requirements of the environmental extremes. A lower ballistic coefficient, combined with additional surfaces for radiative cooling and protective coatings for flow-facing components, may be sufficient for survival in the more challenging entry cases. Additional work can be done to characterize the terminal-velocity phase of the descent—flat plates tend to exhibit intricate motions in free fall that may increase dispersion range—but the current model demonstrates that a global distribution of ChipSats is possible from drag alone. Such missions could produce datasets of spatially-varying phenomena throughout the solar system in unprecedented detail.
Data Availability Statement
The datasets presented in this study can be found in online repositories. The names of the repository/repositories and accession number(s) can be found below: https://github.com/JUmanskyCastro/ChipSats-for-Planetary-Exploration.
Author Contributions
JU led the conception and design of the study, and wrote the first draft of the manuscript. KY prepared atmospheric models, assisted with code development, and prepared the majority of the figures. MP advised the design of the study, reviewed the first draft of the manuscript, and contributed to the final version.
Funding
This work was made possible thanks to funding from the GEM Fellowship Program, the Alfred P. Sloan Foundation, and the Cornell Colman Fellowship.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Acknowledgments
Thank you to Hunter Adams for his guidance with the orbital dynamics and code-debugging during our early simulation attempts, as well as the enjoyable conversations imagining futuristic concepts for next-generation ChipSats. The authors would also like to express thanks to Ralph Lorenz at APL for providing the Titan atmospheric data used in this study.
References
Allen, H., and Eggers, A. (1958). A Study of the Motion and Aerodynamic Heating of Ballistic Missiles Entering the Earth’s Atmosphere at High Supersonic Speeds. Tech. Rep. 1381, NASA Ames.
Anderson, J. (2000). Hypersonic and High Temperature Gas Dynamics. McGraw-Hill series in aeronautical and aerospace engineering (American Institute of Aeronautics and Astronautics).
Atchison, J. A., Manchester, Z., and Peck, M. (2010). Microscale Atmospheric Re-entry Sensors (International Planetary Probe Workshop).
Atchison, J. A., and Peck, M. A. (2011). Length Scaling in Spacecraft Dynamics. J. guidance, Control Dyn. 34, 231–246. doi:10.2514/1.49383
Chapman, S., Cowling, T., Burnett, D., and Cercignani, C. (1990). The Mathematical Theory of Non-uniform Gases: An Account of the Kinetic Theory of Viscosity, Thermal Conduction and Diffusion in Gases. Cambridge Mathematical Library (Cambridge University Press.
Forney, L. J., Van Dyke, D. B., and McGregor, W. K. (1987). Dynamics of Particle-Shock Interactions: Part I: Similitude. Aerosol Sci. Tech. 6, 129–141. doi:10.1080/02786828708959126
Hunter Adams, V., and Peck, M. (2020). R-selected Spacecraft. J. Spacecraft Rockets 57, 90–98. doi:10.2514/1.A34564
Justh, H., Justus, C., and Ramey, H. (2011). Mars-gram 2010: Improving the Precision of mars-gram (NASA Marshall Space Flight Center).
Koppenwallner, G., Fritsche, B., and Lips, T. (2001). Survivability and Ground Risk Potential of Screws and Bolts of Disintegrating Spacecraft during. uncontrolled re-entry 473, 533–539.
Launius, R., Jenkins, D., Aeronautics, N., and Administration, S. (2012). Coming Home: Reentry and Recovery from Space. Washington, DC: NASA/SP (National Aeronautics and Space Administration).
Lienhard, J. (2019). A Heat Transfer Textbook. Fifth Edition. Dover Books on Engineering (Dover Publications.
Manchester, Z., Peck, M., and Filo, A. (2013). Kicksat: A Crowd-Funded mission to Demonstrate the World’s Smallest Spacecraft.
Manchester, Z., and Peck, M. (2011). Stochastic Space Exploration with Microscale Spacecraft. In AIAA Guidance, Navigation, and Control Conference, 6648.
McClain, W., and Vallado, D. (2001). Fundamentals of Astrodynamics and Applications. Space Technology Library (Springer Netherlands).
NOAA (1976). NASA, on Extension to the Standard Atmosphere, U. S. C., and of the Air Force, U. S. D. Washington, DC: U.S. Standard Atmosphere (1976. NOAA - SIT 76-1562.
Storch, J. (2002). Aerodynamic Disturbances on Spacecraft in Free-Molecular Flow. doi:10.1061/40722(153)60
United States Air Force (1965). Aerodynamics Handbook for Performance Fligh Testing. Edwards Air Force Base, CA: USAF Experimental Flight Test Pilot School.
Yelle, R., Strobel, D., Lellouch, E., and Gautier, D. (1997). Engineering Models for Titan’s Atmosphere. Huygens: Sci. Payload Mission 1177, 243–256.
Nomenclature
A ChipSat area
a semi-major axis
D drag deceleration
G gravitational constant
h ChipSat altitude
L ChipSat/characteristic length
m ChipSat mass
R molar gas constant
T temperature
t time
V velocity
α angle of attack
β ballistic coefficient
γ isentropic expansion factor
ε emissivity
η molecular accommodation coefficient
ϕ flight path angle
i orbital inclination
λ mean free path
μ viscosity
ρ density
σ Stefan-Boltzmann constant
Subscripts
C continuum flow
c cross-sectional
n normal component
o initial
r reference
s surface
t tangential component
0 gas stagnation point
1 point before the shock
2 point after the shock
Keywords: chipsat, femtosat, swarm, EDL, atmospheric entry, aerothermal model, low ballistic coefficient, planetary exploration
Citation: Umansky-Castro JS, Yap KG and Peck MA (2021) ChipSats for Planetary Exploration: Dynamics and Aerothermal Modeling of Atmospheric Entry and Dispersion. Front. Astron. Space Sci. 8:664215. doi: 10.3389/fspas.2021.664215
Received: 04 February 2021; Accepted: 24 May 2021;
Published: 12 July 2021.
Edited by:
Simon Pete Worden, Independent Researcher, Menlo Park, United StatesReviewed by:
Peter Klupar, Breakthrough, United StatesPascale Ehrenfreund, George Washington University, United States
Copyright © 2021 Umansky-Castro, Yap and Peck. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Joshua S. Umansky-Castro, anN1NEBjb3JuZWxsLmVkdQ==