 Matti Pouke
Matti Pouke Evan G. Center
Evan G. Center Alexis P. Chambers
Alexis P. Chambers Timo Ojala
Timo Ojala Steven M. Lavalle
Steven M. Lavalle
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Virtual Real., 26 May 2022
Sec. Virtual Reality and Human Behaviour
Volume 3 - 2022 | https://doi.org/10.3389/frvir.2022.869603
In this study we investigated the effect of body ownership illusion-based body scaling on physics plausibility in Virtual Reality (VR). Our interest was in examining whether body ownership illusion-based body scaling could affect the plausibility of rigid body dynamics similarly to altering VR users' scale by manipulating their virtual interpupillary distance and viewpoint height. The procedure involved the conceptual replication of two previous studies. We investigated physics plausibility with 40 participants under two conditions. In our synchronous condition, we used visuo-tactile stimuli to elicit a body ownership illusion of inhabiting an invisible doll-sized body on participants reclining on an exam table. Our asynchronous condition was otherwise similar, but the visuo-tactile stimuli were provided asynchronously to prevent the onset of the body ownership illusion. We were interested in whether the correct approximation of physics (true physics) or physics that are incorrect and appearing as if the environment is five times larger instead (movie physics) appear more realistic to participants as a function of body scale. We found that movie physics did appear more realistic to participants under the body ownership illusion condition. However, our hypothesis that true physics would appear more realistic in the asynchronous condition was unsupported. Our exploratory analyses revealed that movie physics were perceived as plausible under both conditions. Moreover, we were not able to replicate previous findings from literature concerning object size estimations while inhabiting a small invisible body. However, we found a significant opposite effect regarding size estimations; the object sizes were on average underestimated during the synchronous visuo-tactile condition when compared to the asynchronous condition. We discuss these unexpected findings and the potential reasons for the results, and suggest avenues for future research.
Understanding size and distance perception in virtual reality (VR) has been seen as a relevant research topic, not only because of scientific interest, but also since incorrect estimations inside virtual environments (VEs) might lead to unwanted effects in various VR-based training, design and visualization applications (Renner et al., 2013). It is a known phenomenon that familiar size cues affect the perception of sizes and distances in both real life and VR. As we see familiar objects, their known size acts as a reference in which we can compare less known features of the environment. The “body scaling effect” refers to the phenomenon of our own body acting as a familiar size cue; our own limbs act as a perceptual ruler in which we base the proportions of our surroundings and nearby objects (eg. Linkenauger et al., 2010; Ogawa et al., 2017). The body ownership illusion refers to an artificial or virtual body appearing as one’s own, similarly to the rubber hand illusion (Botvinick and Cohen, 1998). This illusion has been used to manipulate perception of sizes and distances by making participants embody virtual bodies of different sizes in VR; as the size of the virtual body changes, the body scaling effect causes perceived sizes and distances to scale into the opposite direction (Van Der Hoort et al., 2011; Banakou et al., 2013; Van der Hoort and Ehrsson, 2014; Van Der Hoort and Ehrsson, 2016; Weber et al., 2020). Based on their studies, van der Hoort and Ehrsson explain that the body-scaling effect is not dependent on just the visual appearance of our body, but also purely proprioceptive information manipulated by the body ownership illusion which can cause the perceptual effects of scaling sizes and distances even when visual information of the body is lacking (Van der Hoort and Ehrsson, 2014; Van Der Hoort and Ehrsson, 2016). In their latter experiment, this was demonstrated by eliciting a body-ownership illusion of an invisible body using a stereoscopic camera system and visuo-tactile stimuli, and examining the illusion’s effect on size estimations.
Another way to significantly affect our perception of sizes and distances is by artificially manipulating our interpupillary distance (IPD), for example, by using virtual reality (Kim and Interrante, 2017). A room modeled at human scale in virtual reality essentially appears 10 times larger when we reduce our IPD by a factor of ten by manipulating the distance of the virtual cameras acting as our eyes in VR (Pouke et al., 2020). Manipulating our perception of sizes and distances also causes interesting effects regarding the perception of physical phenomena, such as rigid body dynamics. For example, an object dropped from a height of 1.5 m reaches the ground in 0.55 s whereas an object dropped from 15 cm reaches the ground in only 0.17 s. Although this behavior seems natural in everyday life, the phenomenon appears greatly unnatural when viewed at abnormal scales in VR, even when we are fully aware of being scaled (Pouke et al., 2020, 2021). Difficulties in perceiving physics at abnormal scales have been shown to increase difficulties in, for example, robotic teleoperation at micro- and nanoscopic scales (Zhou et al., 2000; Sitti, 2007; Millet et al., 2008).
As discussed above, the size cues of an environment affect our perception of sizes and distances. Previous research has suggested that egocentric distances are generally underestimated in VR due to a multitude of factors. For example, richer environmental cues and realistically modeled environments generally seem to improve the accuracy of distance judgements (Renner et al., 2013) and sensitivity to height perception (Deng and Interrante, 2019). Langbehn et al. (2016) studied mismatching size cues in virtual environments and found that participants generally relied on their own bodies when judging the correct scale. An exception, however, was the presence of multiple virtual characters, when the scale of the virtual characters was perceived as the correct one.
Previous research also suggests that our own action capabilities can affect our perception. For example, wearing a heavy backpack makes a hill appear steeper since the heavy backpack alters our perceived affordances (Bhalla and Proffitt, 1999). However, these studies have been criticized, claiming instead that the identified affordance-based perceptual effects have been due to demand characteristics and not to actual changes in perception (eg. Hutchison and Loomis, 2006).
The body-scaling effect refers to the phenomenon of our own body, real or virtual, affecting the perception of sizes and distances. Linkenauger et al. (2010) manipulated the retinal size of objects using magnifying and “minifying” goggles and found that placing a hand next to these objects appeared to scale the objects back towards their normal size. Ogawa et al. (2017) found that not only can our hand size affect the perceived size of objects, but familiar sized objects can also affect the perceived size of hands in VR. In a follow-up study, Ogawa et al. (2019) reported that the strength of the body-scaling effect can be altered by the visual realism of the virtual hand.
The body ownership illusion refers to the sensation of a virtual or artificial body appearing as one’s own body, similarly to the rubber hand illusion (Botvinick and Cohen, 1998). In previous research, one of the most popular ways of achieving the body ownership illusion has been through the application of synchronous visuo-tactile stimuli, for example by touching the artificial body simultaneously with the corresponding location in the participant’s own body. Typically, asynchronous stimulation, performing the touches out of sync, has been the control condition in these types of experiments. According to Maselli and Slater (2013), visuomotor synchrony and appearance of the virtual body can also be utilized to elicit the illusion. In addition, the body ownership illusion can even take place purely without visuo-tactile stimuli; however, including visuo-tactile stimuli can be helpful for eliciting the illusion when other properties of the illusion (such as first person perspective or the visual appearance of the virtual body) are violated (Maselli and Slater 2013).
The effect of a full body ownership illusion (Slater et al., 2009) for size and distance perception has been the focus of multiple studies. Van der Hoort and Ehrsson embodied participants as dolls and giants using head-mounted displays (HMDs), stereoscopic cameras, and synchronous visuo-tactile stimuli, and found that body ownership illusions significantly affected the perceived sizes of nearby objects. Later, Banakou et al. used VR to embody participants in a child’s body and found it not only affecting the perceived size of objects, but also participants’ associated personality traits (Banakou et al., 2013). Serino et al. found that embodying bodies of extreme sizes affected participants’ judgements of the properties of their own bodies (Serino et al., 2020).
According to later studies by van der Hoort and Ehrsson, the body scaling effect caused by the body ownership illusion exists even when the body is not visible, suggesting that the effect is more related to proprioception than vision (Van der Hoort and Ehrsson, 2014; Van Der Hoort and Ehrsson, 2016). In the latter study, which is conceptually replicated in this paper, illusions of inhabiting small and large invisible bodies were elicited among participants. The participants were lying down on a bed wearing HMDs, which streamed a stereoscopic image from two cameras placed on a bed in a laboratory. The participants’ legs were then stroked while simultaneously moving a brush in front of the camera either 60–80 cm away (small body) or 300–400 cm away (large body). The experimenters then found an inverse relationship between the body size and estimated object sizes during synchronous stimuli, whereas this effect did not exist in the control condition in which the touch and brush movement were asynchronous. The work of Banakou et al. (2013) found a similar perceptual effect when the body ownership illusion was controlled by visuomotor synchrony. The work of Weber et al. (2020) found object sizes were estimated differently across three different body size conditions; however, they did not find differences between synchronous and asynchronous stimulus conditions. This is in line with the findings of Maselli and Slater that a synchronous visuo-tactile stimulus is not necessary for the body ownership illusion in cases where a visible body is experienced from a first-person perspective (Maselli and Slater, 2013). Moreover, according to their findings, even asynchronous stimuli can be perceived as real when other properties for body ownership illusion are taking place.
We are not aware of any study that would have investigated this perceptual effect with an invisible body in VR. Moreover, we are, as of now, unaware of any studies that would have investigated the effect of body scaling on the perception of physics, as the studies of Pouke et al. (2020, 2021) utilized IPD-based scaling and not body scaling.
In terms of perceiving rigid body dynamics, different scales appear similar to being under the influence of non-earth gravity. When perceiving object velocities and accelerations, being ten times smaller appears essentially the same as if gravity had turned tenfold, while scales further away than one order of magnitude introduce even more peculiarities (e.g. Zhou et al., 2000). However, it appears that humans have the tendency to instinctively expect rigid body dynamics to behave similarly to human-scale under normal gravity conditions. McIntyre et al. (2001) studied this phenomenon by experimenting with astronauts performing in zero gravity and found that their ability to catch vertically moving balls was less accurate in comparison to normal gravity conditions. Human capacities for intercepting moving objects under various directions and accelerations was further analyzed by Senot et al. (2005) in a VR experiment. They also found evidence of humans being more capable of intercepting objects behaving as if under normal gravity, even if best success rate was achieved in intercepting objects under constant velocity. Jörges and López-Moliner (2017) argued that normal earth gravity is a strong Bayesian prior in human perceptual processes, and therefore any contradicting evidence is perceived as false. This bias then leads to generally poor human performance in non-normal gravity conditions and renders adaptation difficult.
In the field of VR research, fidelity is referred to as the extent to which the VR system faithfully simulates the real world. Plausibility illusion, on the other hand, refers to an illusion of realism experienced subjectively by the user (Skarbez et al., 2017a). Fidelity does not necessarily lead to plausibility, as plausibility depends on the expectations of the user instead of physical realism, and can be affected by priming as well as the context of the virtual environment (VE). Skarbez et al. (2017b) suggested a concept called coherence, which, instead of fidelity, refers to the properties of the VE that affect the onset of plausibility illusion. In our previous research (Pouke et al., 2020), we have studied the plausibility of physics models at abnormal scales by virtually scaling participants both ten times smaller and ten times larger by manipulating their IPD, viewpoint height and motion controller interaction distance. Participants dropped and threw objects and their plausibility was estimated under two physics conditions: realistic approximation of physics (a higher fidelity model dubbed true physics) and an inaccurate model that functioned as if the world had changed in size and participants remained at normal scale (a lower fidelity model dubbed movie physics equaling 0.1g at small scale and 10g at large scale, see Figure 1). As a result of scaling, true physics appeared as fast object accelerations and short throwing distances in the small-scale study, and slow accelerations and large throwing distances in the large-scale study. We queried plausibility using two forced-choice questions. The first question queried which one of the models the participants considered matching actual reality, whereas the second question asked which one of the models the participants considered matching their expectations better. Movie physics was chosen as the realistic model by roughly 70% of participants. Interestingly, however, in the small scale study, roughly 90% of participants considered movie physics to better match their expectations, whereas in the large scale study neither movie physics nor true physics were chosen significantly more often as the model matching expectations better. This could mean that in the small-scale study, there were participants who considered true physics surprising even if they considered it to be more realistic. In the large-scale study, however, the opposite appeared to happen; some participants found true physics to match their expectations better even if they ultimately considered movie physics as the more realistic model. In any case, it can be roughly summarized that in these studies, participants perceived high fidelity settings as having low coherence and low fidelity settings as having high coherence. Pouke et al. (2020, 2021).
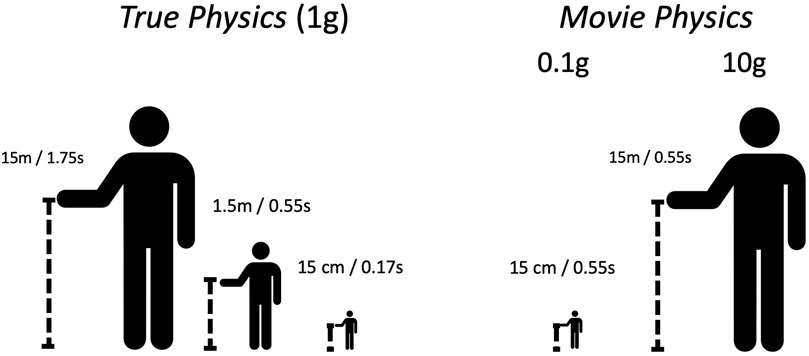
FIGURE 1. A figure depicting conditions reported by Pouke et al. (2021) to illustrate the relationship between gravity and scale among various pairs. In the true physics condition, gravity behaved realistically at each scale (left). In the movie physics conditions, gravity was manipulated so that free-fall speeds of objects (and rigid body dynamics in general) matched that of human height, regardless of scale (right).
In this paper, we present our results of investigating whether body ownership illusion-based body scaling can alter the perception of physics similarly to IPD based scaling as reported by Pouke et al. (2020). This work extends the previous work of Pouke et al. (2020, 2021), generating new knowledge on plausibility of physics perception by investigating previously unexplored factors. In addition, this work acts as a conceptual replication study for the work of Van Der Hoort and Ehrsson (2016), investigating whether the invisible body illusion replicates in VR.
The motivation for this study was to follow up on our two previous studies to address unexplored factors regarding perception of physics in scaling. Our objective was to investigate whether body scaling caused by body ownership illusion could affect the perceived naturalness of object motions similarly to IPD-based scaling.
We designed a VR experiment based on the invisible-body illusion experiment reported by Van Der Hoort and Ehrsson (2016) as well as the scaled-down physics perception experiment by Pouke et al. (2020). We adopted our physics conditions from the work of Pouke et al. (2020), with true physics serving as the realistic approximation of physics, and movie physics representing physics that behaved as though the environment had been scaled up instead (‘movie’ referring to physical behavior typical in Hollywood movies depicting scaled-down characters and their physical surroundings). We chose to utilize the visuo-tactile induced invisible body illusion in the vein of Van Der Hoort and Ehrsson (2016) as a way to investigate the body ownership illusion and body scaling while avoiding possible confounds related to having a visible body. As in the original experiment, we controlled the invisible body illusion using either synchronous or asynchronous visuo-tactile stimuli. Using a visible body, however, it would have become possible that the participants would have experienced the body ownership illusion also in the asynchronous condition due to merely seeing the virtual body (e.g., Maselli and Slater, 2013; Weber et al., 2020).
Our conditions followed the experimental protocol of Van Der Hoort and Ehrsson (2016), providing either synchronous or asynchronous visuo-tactile stimuli to control the onset of an invisible body illusion of possessing a small body, and an object size estimation task to assess the strength of the body scaling effect. To investigate the effect of body scaling on physics perception, we added a physics plausibility estimation task similar to Pouke et al. (2020) into both syncronous and asynchronous conditions before each object size estimation task. To keep the experimental conditions from deviating too much from the protocol of Van Der Hoort and Ehrsson (2016), we asked the participants to observe a virtual character performing the interaction task instead of asking the participants to interact with the objects themselves, similarly to our previous studies. Also, differing from our previous studies, we utilized only one forced-choice question, instead of two, to query for plausibility: more specifically, we asked the participants to state the model that better matched their expectations. This choice was made because we wanted the participants to specifically report on their first impressions, instead of stopping to consider which one of the models should be real. There would have been little point asking about realism, given that the physics estimation task in both synchronous and asynchronous conditions was visually identical. Other differences between this study and the aforementioned studies can be summarized as follows: Unlike Van Der Hoort and Ehrsson (2016), our experiment utilized VR instead of physical cameras and objects. In addition, we only considered a small-body condition rather than both small-body and large-body conditions to keep the total number of counterbalanced conditions manageable (please see the details about our preregistration at the end of this subsection). Finally, differing from Pouke et al. (2020), our scale of interest was only 5 times smaller than human scale since a 10 times smaller invisible body made the visuo-tactile stimuli too difficult to observe without manipulating IPD. This made our invisible body roughly between 30–40 cm in size, depending on the height of the participant, which was roughly the same size as the smallest doll body used by Van Der Hoort et al. (2011).
Our hypotheses were as follows:
H1: After synchronous visuo-tactile stimuli, subjects will consider movie physics to appear more real.
H2: After asynchronous visuo-tactile stimuli, subjects will consider true physics to appear more real.
These predictions are driven by the idea that participants should use their perceived body scale to predict their environment’s physics. Thus, when they are instilled with the illusion of inhabiting a small body, they should estimate movie physics to be more plausible, whereas when they are left with their normal body scale, they should estimate true physics to be more plausible. In addition to physics plausibility observations, we also collected object size estimations for estimating the effect of body scaling, as well as presence and background data for exploratory purposes. We preregistered our procedure and analysis methods at osf. io 1. It should be noted that our preregistration also includes two additional hypotheses that are related to two additional conditions regarding physics perception at abnormal scales. In response to reviewer feedback and efforts to improve clarity, however, the results and other details regarding these two hypotheses and are reported in a separate manuscript instead (Pouke et al., in preparation).
The experiment was a within-subject design with 40 participants (20 females and 20 males) naive to the purposes of the experiment. The participants gave written informed consent in accordance with the local ERB. The sample size was based on our previous studies on perception of physics plausibility (Pouke et al., 2020; Pouke et al., 2021). This sample is also twice as large as what was reported as necessary to detect the perceptual effects of body scaling by Van Der Hoort and Ehrsson (2016). We had to replace four participants due to significant differences in experimental conditions due to researcher and software errors, bringing the total number of participants we ran to 44. The participants’ ages ranged from 18 to 46, the average age being 27,5. The participants self-reported their VR and video game experience using a scale from from one (no experience) to seven (daily use). Using this quantification, their average VR and video game experience was reported as 1.8 and 4.15, respectively. For Covid-19 related precautions, all equipment and surfaces were disinfected using alcohol wipes. The Cleanbox device was used to disinfect the HMD between participants 2. Researchers were wearing masks throughout the experiment. Masks and hand sanitizer were also available for participants.
Using Unreal Engine 4, we prepared an experimental application designed to loosely mimic the laboratory conditions reported in the work of Van Der Hoort and Ehrsson (2016). The virtual environment depicted a simple room with a bed on one side, and a door, bookshelf and a nightstand at the opposite side of the room (see Figure 2 left). The virtual camera was placed on a virtual exam table looking towards the door. The height of the camera was set so that it matched the reclined angle in which the participants were sitting, but at 0.2 scale.
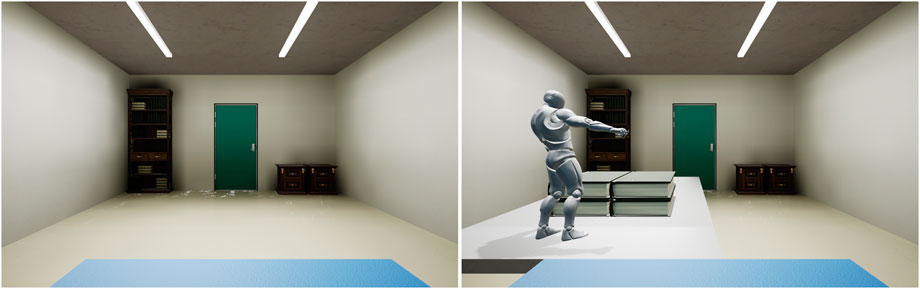
FIGURE 2. Virtual environment as seen by participants: during stimulation and cube estimation phases (left), during physics estimation task (right).
As stated in previous sections, the physics conditions were demonstrated by an animated robot. We chose to use a robot instead of a human-looking avatar to help maintain more consistent size cues for the environment; we believed an animated robot could be perceived as something akin to an animatronic puppet. In addition, we considered using the default game engine assets where possible for the benefit of the replicability of this study. The animations of the robot were captured using Vive Trackers and the Unreal Engine Vive MoCap plugin. A researcher wearing the Vive Trackers performed a sequence of picking up and dropping three tabs and throwing two. The MoCap plugin was used to target this sequence into the Unreal Engine default mannequin that acted as our robot. The same animation sequence was used for all subjects and all conditions to prevent confounds. The rigid body dynamics of the pop tabs was simulated using the built-in physics engine in Unreal Engine. Similarly to Pouke et al. (2021), physics were controlled by manipulating gravity; the prototype switched between physics conditions according to the experiment protocol by loading identical-looking levels with different World Gravity settings. For true physics, gravity was set at 1g whereas for movie physics it was set at 0.2g, essentially scaling rigid body dynamics of objects as if the doll-sized robot was human-sized. Using animation Notify States, the robot was programmed to pick up and release the pop tabs at specific animation frames utilizing the default ‘grab’ and ‘throw’ events that are preprogrammed inside the Unreal Engine VR “Motion Controller” template for interactive picking up and throwing in VR. This means that the pop tab objects were attached to the robot arm after a ‘grab’ event and detached during ‘throw’ events, after which the physics engine simulated their trajectory according to the object velocity at time of release. This made the simulation of throwing and dropping the tabs similar to how object throwing and dropping was simulated in our previous studies, with the only exception being that the physical dropping and throwing motions were prerecorded instead of performed by each participant individually. As in our previous studies, we also assumed the mass of the pop tab light enough not to affect the physical arm motions due to inertia or lack of muscle strength (Cross, 2004).
For VR hardware, we used a Valve Index HMD and controllers.
During the synchronous condition, the participant received synchronous visuo-tactile stimuli while reclined on an exam table (see Figure 3 left). The stimuli were provided in an attempt to provide an invisible-body illusion with a body scaled down at 20% of original size. The stimuli were provided using a motion controller and a tennis ball. Previous research (e.g. Van Der Hoort and Ehrsson 2016) has stated that visuo-tactile stimuli administered to the feet and lower legs are useful for eliciting a full-body illusion and we also followed this procedure. While we touched the participants’ lower legs and feet, a yellow ball was moving within the virtual environment. However, the transformations of the virtual ball were scaled down and offset so that while the participants legs were touched with the physical tennis ball, the virtual ball appeared to be only tens of centimeters away from the participant’s head. The offset required for the transformations of the virtual tennis ball was derived using a avatar scaled down to 0.2 from human size reclined on the virtual exam table; this avatar was obviously deleted during the actual experiment. In addition, the location of the ball was calibrated prior each participant to accommodate for participants of different heights. The asynchronous condition was identical to the synchronous with the exception that the visuo-tactile stimulus was asynchronous, moving the controller and the physical tennis ball independently of each other, to break the correspondence between visual and tactile senses. In both conditions, we utilized a combination of sweeps and taps at different locations of the participants’ feet and lower legs while making an effort to keep the movements of the ball somewhat random and unpredictable (inspired by the procedure described by Slater et al., 2008). In the asynchronous condition, the experimenter was holding the controller in one hand and the ball in another, so that he, or she could produce both temporal delays as well as spatial asynchronicity between the visual and physical stimuli in a randomized manner while otherwise mimicking the characteristics of the taps and sweeps introduced in the synchronous condition (please see the video link appearing later in this section).

FIGURE 3. Participants were resting on an exam table during synchronous and asynchronous visuo-tactile conditions (left) and using VR controllers to estimate cube sizes (right).
After 90 s of stimulus presentation, the virtual ball was hidden, and a table, a scaled-down robot, a stack of books and a set of soda can tabs appeared (See Figure 2 right). Each participant then experienced animation sequences of a doll-sized robot (similar in size to the simulated invisible body) handling pop tabs for the purposes of physics plausibility estimation. The robot picked up and dropped three tabs, and threw two across the book. The animation was presented twice, with the behavior of tabs following either true physics or movie physics, depending on the order of conditions. The order of the true and movie physics presentations, as well as the synchronous and asynchronous conditions in which they were nested, were counterbalanced among participants. For full details regarding the counterbalancing scheme, including conditions participants subsequently experienced as part of protocols for Pouke et al. (in preparation), see Supplementary Material. After viewing both types of physics, the participant was asked to perform a verbal judgement on the perceived plausibility of the tabs behavior using the question adapted from Pouke et al. (2020): “Thinking back how the pull tabs were behaving, which matched your expectations, the first or the second time?”.
After the verbal judgement, the physics perception related objects were again hidden, and 60 s of stimuli were provided. After this, the participant was given the motion controllers, and presented with three green cubes (10 cm, 20 cm and 30 cm) appearing in randomized order at a distance of 15 cm. After a cube had gone out of sight, we asked the participant to show the apparent size of the cube bimanually (see Figure 3 right) and to click a trigger button to save their response, which was followed by the presentation of the next cube. After estimating the size of three cubes, the participant removed the HMD and controllers and filled out an illusion strength questionnaire adapted from Van Der Hoort and Ehrsson (2016). The procedure was then repeated for either the synchronous or asynchronous condition, depending on the counterbalancing order. A video demonstrating the experimental conditions, including the administration of both synchronous and synchronous stimuli, can be viewed at: https://youtu.be/IxLSxH6ZqvU.
After finishing both conditions, the participant removed the HMD and filled in a post-experiment questionnaire consisting of the Slater-Usoh-Steed presence questionnaire (SUS) (Slater et al., 1994; Usoh et al., 2000) and a background questionnaire. At the conclusion of the experiment, the participant was debriefed and compensated with a gift card worth 20 €.
We obtained unexpected results regarding the effect of body scaling on the perception of physics plausibility. We predicted that movie physics would appear more realistic in the synchronous condition and that true physics would appear more realistic in the asynchronous condition. However, according to responses to the main question, movie physics were selected by a majority in both conditions (synchronous 28/40, asynchronous 30/40). Following the preregistered procedure, we tested both hypotheses using the binomial test (one-tailed) against the null proportion (20/40). According the results of the tests, H1 was supported (condition A, p = 0.008) while H2 was unsupported (condition B, p = 1.00).
While the evidence in favor of H1 technically indicates that movie physics do indeed appear more real while embodied, the lack of support for H2 raises questions whether the body scaling effect was the actual reason why movie physics were preferred. Since rigid body dynamics under normal earth gravity are usually perceived as natural (e.g. Jörges and López-Moliner, 2017), it seems likely that the physics perception was modulated by something other than the visuo-tactile stimuli.
Here we present further analyses that were not preregistered, along with Bayes factors (reported as BF) to accompany each measure. Unlike frequentist statistics, an advantage of the Bayesian approach is that it can estimate support for the null hypothesis in addition to support for the alternative (e.g., see Wagenmakers et al., 2017). Bayes factors provide evidence on a continuous scale, though conventionally, a value of three or more is considered support for the alternative hypothesis, 0.33 or less is considered support for the null hypothesis, and values between these limits signal that the data are insensitive to distinguishing between hypotheses, with values between one and three and values between 0.33 and one considered merely anecdotal evidence in favor of the alternative or null hypothesis, respectively (Jeffreys, 1961; Lee and Wagenmakers, 2014). We used R statistical software to estimate Bayes factors for proportion tests (Morey and Rouder, 2021), Wilcoxon signed-rank tests and Spearman’s ρ (van Doorn et al., 2020), and binomial regression models (Bürkner, 2017; Makowski et al., 2019) using function-default priors, unless otherwise noted.
We performed an additional two-tailed binomial test to investigate whether movie physics were also preferred in the asynchronous condition. The test revealed that movie physics were significantly preferred (p = 0.002). Therefore, movie physics were significantly preferred across both conditions (synchronous BF = 6.18; asynchronous BF = 32.75). Furthermore, if we update our prior such that the ratio of preference for true physics in the asynchronous condition matches that of movie physics in the synchronous condition, we find very strong support for the alternative hypothesis (BF > 100). This further confirms that contrary to our predictions, movie physics were preferred by a significantly greater number of participants regardless of condition.
The purpose of the cube estimation task was to investigate whether the synchronous condition affected the perception of sizes similarly to Van Der Hoort and Ehrsson (2016). To replicate their protocol, we first re-scaled all estimates to the level of the largest cube (30 cm), and then standardized the estimates to each participant’s average estimate across all six conditions. This transformation allowed us to investigate deviations of estimates in percentages relative to each participant’s perceptual mean, rather than in raw centimeters, thus producing the same “deviation from mean” measure touted in the original study. Negative values on this scale represent underestimations of object sizes relative to a participant’s perceptual mean, whereas positive values represent overestimations. A Kolmogorov-Smirnov test on the difference of the standardized distributions indicated that the data was non-normal (D = 0.67, p < 0.001), thus we used non-parametric Wilcoxon signed-rank tests to analyze the differences between estimations. Surprisingly, we found effect opposite to the one found in (Van Der Hoort and Ehrsson, 2016); the estimates for cube sizes were significantly larger in the asynchronous condition (Z = 2.82, p = 0.005, r = 0.45, BF = 5.91) (see Figure 4), meaning that participants tended to overestimate object sizes in the condition in which the body ownership illusion should have been absent, yet underestimate when it should have been present.
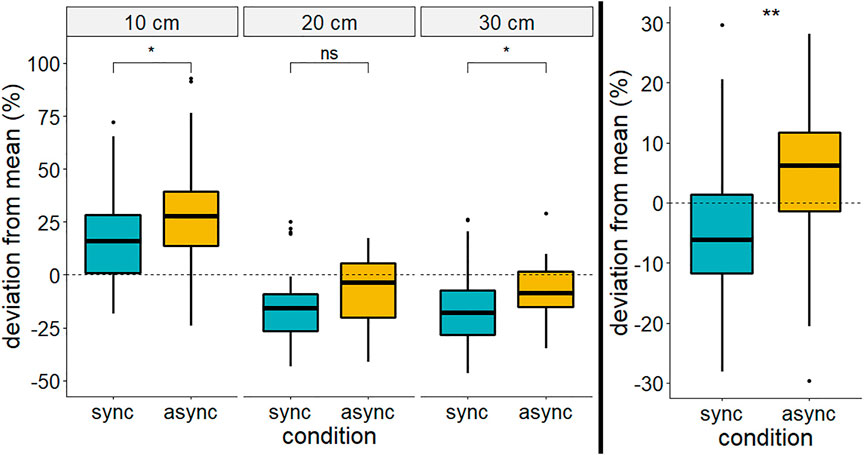
FIGURE 4. Boxplots for cube size estimation data. Deviations from mean across conditions per individual cubes (left) and total deviation from mean across condition (right).
Investigating the estimations across different cube sizes, it appears the smallest cube (10 cm) was overestimated in both conditions, the overestimation being larger in the asynchronous condition. As for medium (20 cm) and large (30 cm) cubes, however, it appears that the cubes were approximated closer to their actual size in the asynchronous condition, while the sizes were underestimated during the synchronous condition. Boxplots for cube estimation data can be seen in Figure 4.
The results of the size estimation tasks were thus surprising, as well. It appeared that the visuo-tactile stimulation did have a significant perceptual effect in line of Van Der Hoort et al. (2011); Van der Hoort and Ehrsson (2014); Van Der Hoort and Ehrsson (2016). However, some unforeseen aspect of the experiment reversed the expected outcome.
We utilized the illusion strength questionnaire from Van Der Hoort and Ehrsson (2016) to investigate the strength of the invisible body illusion in synchronous and asynchronous conditions. Similarly to their findings, Wilcoxon signed-rank tests revealed a significant difference in statements 1 (Z = 4.99, p < 0.001, r = 0.79, BF > 100) and 3 (Z = 4.53, p < 0.001, r = 0.72, BF > 100) and no difference in control statements 4–6 (all ps > 0.05; q4 BF = 0.25, q5 BF = 0.18, q6 BF = 0.18). Surprisingly, there was no significant difference in statement 2, “I had invisible legs”, the median response being six in both conditions (Z = 1.48, p = 0.14, r = 0.23, BF = 0.42). Boxplots for illusion strength questionnaire data can be seen in Figure 5. The illusion strength questionnaire results are mostly in line with the results reported by Van Der Hoort and Ehrsson (2016). This implies that the application of both synchronous and asynchronous stimuli were experienced as intended; the participants experienced being touched by the virtual ball despite the virtual ball being offset much closer to them than their real feet. In addition, this illusion was not experienced during the asynchronous condition. Curiously, however, the responses to statement two suggest that the participants might have felt ownership towards an invisible body regardless of stimulus condition. Here an examination of the pattern of support for null hypotheses regarding illusion strength questionnaire statements may aid interpretation. Notably, the associated Bayes factors provide moderate support for the lack of a true difference between synchronous and asynchronous conditions for statements four to six, yet only weakly support the same lack of an effect for statement 2.
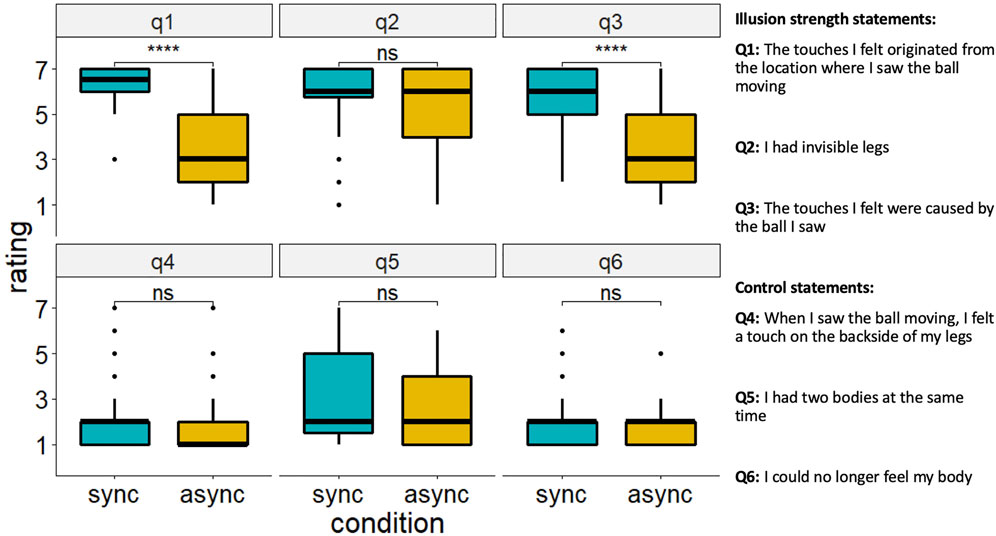
FIGURE 5. Boxplots of the ratings for each statement in the illusion strength questionnaire.
We also investigated the relationship between cube size estimations and illusion strength using the method described in Van Der Hoort and Ehrsson (2016). Each participant’s perceptual effect was quantified as the mean of their synchronous condition size estimates minus the mean of their asynchronous condition size estimates, divided by their overall estimation mean. Likewise, each participant’s embodiment effect was quantified as the mean of their responses to illusion strength questionnaire items one to three minus the mean of their responses to items 4–6. Participants were rank ordered for each effect dimension, respectively, and the association between the effect ranks was analyzed using Spearman’s rank correlation. However, unlike Van Der Hoort and Ehrsson (2016), we found no correlation between the strength of the invisible body illusion and the perceptual effect (p = 0.17, BF = 0.34; see Figure 6). This outcome suggests that the strength of the invisible body illusion was not closely tied to the strength of the perceptual effect experienced by the participants, although the associated Bayes factor was not strong enough to provide more than anecdotal evidence in favor of the null hypothesis.
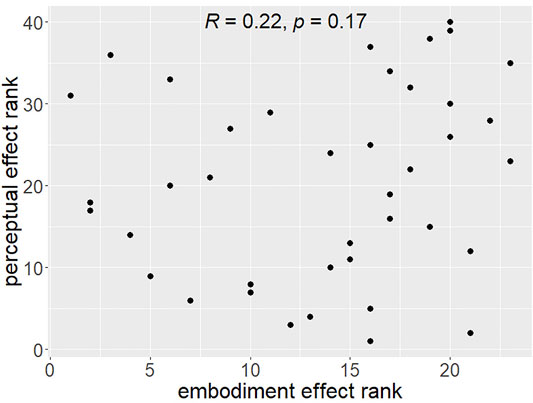
FIGURE 6. Correlation plot between invisible body illusion (Q1-Q3) and perceptual effect. No significant correlation was found neither when inspecting the overall correlation across all questions nor per individual questions.
Similarly to Pouke et al. (2020, 2021), we collected PI data using the extended version of the SUS questionnaire (Slater et al., 1994; Usoh et al., 2000) as well as background information, to investigate whether these factors influenced the preference of physics choices. We computed the SUS score as the sum of six and seven responses per participant. The background data included age, gender as well as video game and virtual reality experience quantified as scores between one and 7. Similarly to our previous studies, we found none of these factors predicted the physics preferences; there were no significant associations among any of the physics choices and SUS or any of the demographics variables in binomial regression models (all ps > 0.05; however, data were insensitive as all BFs fell between 0.33 and 3.0 when comparing alternative models to the null model).
Our main analyses provided evidence for H1. However, we found no support for H2. Our exploratory analysis found that movie physics were perceived as more realistic across both conditions. Thus, in all likelihood, the body ownership illusion was not the primary driver behind the outcome of H1.
The preference for the movie physics in the asynchronous condition came as a surprise to us. In the synchronous condition, we anticipated that the body-ownership illusion based body-scaling effect would affect the perception of physics plausibility, making movie physics appear more real. In the asynchronous condition, however, there was no intended manipulation of size and distance perception, yet the outcome was the same as in the synchronous condition. In addition, had the inducement of the body-ownership illusion somehow failed, we would have anticipated true physics to become the preferred physics model.
While additional experiments will be necessary to fully account for the popularity of the incorrect physics judgements, we can speculate some of the reasons that might explain the results. An obvious question is whether the preference towards movie physics could be explained by the fact that statement two of the illusion strength questionnaire, “I had invisible legs” received high scores in both conditions. If the participants experienced the body ownership illusion in both conditions, it could, in principle, explain why movie physics were experienced as plausible in both conditions. However, the associated Bayes factor for statement two revealed only anecdotal support for equality between the synchronous and asynchronous conditions (BF = 0.42), and furthermore, the perceptual effects regarding object size estimations do not seem to support this interpretation as the body scaling effect appears to have reversed.
Another explanation might be that we used a humanoid robot performing the object manipulation tasks. Langbehn et al. (2016) reported that the existence of virtual characters acted as a strong size cue in their experiment, even overriding the participant’s own virtual body. In our experiment, the only visible body was the one belonging to the robot. It could be that in our experiment the participants did not relate the trajectories of objects to their own (real or virtual) bodies, but to the robot’s body instead, even when the robot was obviously smaller than their physical selves (the robot was also surrounded by size cues indicating its size, such as a stack of books and a table). Therefore, it was the robot body that became the perceptual ruler to the participants, at least in relation to object motions. This is similar to the findings from our previous studies Pouke et al. (2021), in the sense that the participants preferred object motions according to which the handler of the objects (controlled by themselves in our previous study) would have been at human scale, despite other size cues telling otherwise (in our previous studies, we also directly told the participants they are up/downscaled). It would appear as if participants in all three studies considered the environment scaled, and the source of object motions unscaled, when judging object motions, even if they “know” that the environment should be unscaled.
Another potential factor is related to the animation performed by the robot which is based on motion capture (as explained in Section 3.3). Since the robot was animated using rather natural-looking human motions, it might reinforce the illusion that all motions are taking place in human scale. Perhaps, if the animation was more artificial-looking, “robot-like” or resembling the motions of a mouse-sized creature (especially regarding the speed of which the robot’s limbs are moving), the naturalness of true physics would have become more apparent. In addition, if the object motions were caused entirely by some non-humanoid entity, the plausibility of object motions might have been perceived differently.
We also collected object-size estimation data to confirm that the body-ownership illusion we were causing was affecting the participants’ perception of sizes. These results were surprising as well. Instead of the synchronous condition making objects appear larger, it appears as if they were underestimated in that condition, instead. This also warrants future studies in order to explain what caused the inverse effect.
We can look at the differences between this study and that of Van Der Hoort and Ehrsson (2016) to speculate on what caused the inverse effect. Firstly, this study took place in VR whereas the original study used a stereoscopic camera system instead. However, the body-scaling effect is known to exist in VR as well. Banakou et al. (2013) also found object sizes appearing larger to participants when embodying the virtual body of a 4-year old child. Weber et al. (2020) also used VR to replicate an earlier study on body ownership illusion-based body scaling (Van Der Hoort et al., 2011). While Weber et al. (2020) found significant effects between different body sizes, similarly to our results, they were not able to replicate the difference of judgements between synchronous and asynchronous conditions. However, they did not find any significant difference between the two conditions whereas we found an effect that was inverse to the original study. Maselli and Slater (2013) reported that under favorable conditions, even asynchronous stimuli can appear as real to the participants. However, as we did not have any other requirements of the body ownership illusion in place, it seems unlikely that our participants would have somehow experienced the asynchronous condition as more real than the synchronous condition. In fact, participants often commented on the stimuli appearing to the wrong leg, or “delayed” when we were beginning the application of the asynchronous stimuli. As of now, we are unaware of other VR studies that have attempted to investigate the body-scaling effect using an invisible-body illusion.
Another difference between this study and that of Van Der Hoort and Ehrsson (2016) is that our invisible body was twice as small as to the original. One can speculate whether there is a lower-limit to the size of a virtual invisible body that can be inhabited through visuo-tactile stimulus. This lower limit seems unlikely, though, since in their earlier article van der Hoort and Ehrsson Van Der Hoort et al. (2011) demonstrated being able to elicit both the ownership illusion and the perceptual effects using a visible 30 cm body. A limitation of our study compared to that of Van Der Hoort and Ehrsson (2016) is that we only considered the illusory ownership of a small invisible body instead of having both small and large bodies. It would have been interesting to see if our setup would have caused inverse results regarding the large body condition as well, replicated earlier results, or if some order effects could have appeared.
One can speculate whether the appearance of the robot manipulating pop tabs somehow caused the inverse effect. However, the robot was hidden most of the time, appearing only during the physics estimation task and disappearing again before the second round of the stimulus and the object size estimation task. In addition, the robot was also accompanied by additional size cues (books, table, pop tabs) so that the participants could clearly see it was doll-sized. Moreover, the robot appeared the same in both synchronous and asynchronous conditions.
It is possible, however, that something in the visual appearance of the scene made the difference even if we tried to mimic the layout of the laboratory room presented in the work of Van Der Hoort and Ehrsson (2016). Judging from the images presented in the original study, it is difficult to estimate how far the edge of the bed was from the camera, or how exactly it appeared to the participants. It could be that the edge of our virtual exam table was so close to the camera that this (see Figure 2), together with the sensation of laying on the physical exam table, gave participants the sensation of having very short legs from the very beginning of the simulation, even before any stimulus was presented. After this, the visuo-tactile stimulus could have merely scaled up the perceived size of the legs instead of scaling them down as intended. This explanation might be feasible in the sense that Ogawa et al. (2017) also reported that environmental cues can also affect perceived size of body cues and not only the reverse, depending on whichever is presented first. In any case, however, further experiments are necessary to explain the inverse result we found.
In this paper we investigated the effect of the body ownership illusion on the perception of physics plausibility. We explored the perception of physics plausibility under two conditions that were related to either the presence or lack of a body ownership illusion caused by synchronous visuo-tactile stimuli. Using the visuo-tactile stimuli, we attempted to elicit the illusion of inhabiting an invisible body roughly the size of a doll (30–40 cm). Similarly to previous research (e.g. Van Der Hoort et al., 2011; Van der Hoort and Ehrsson, 2014; Van Der Hoort and Ehrsson, 2016), we used asynchronous stimuli as a control condition. Our goal was to examine whether correct approximation of physics (true physics) or physics that are incorrect and appearing as if the environment is five times larger instead (movie physics) appeared more realistic to the participants. We were able to confirm that movie physics did seem to appear more realistic to the participants under the body ownership illusion. However, we were unable to confirm that true physics would have appeared more realistic when the body-ownership illusion was lacking. Our exploratory analysis found out that movie physics was instead perceived as real under both conditions.
Moreover, we were not able to replicate the results of Van Der Hoort and Ehrsson (2016) concerning object size estimations when inhabiting a small invisible body. However, we found a significant opposite effect regarding size estimations; the object sizes were underestimated during the synchronous visuo-tactile condition when compared to the asynchronous condition.
Even though the results were unexpected, they present new information as well as open up avenues for future work regarding the perception of physics, sizes and distances in VR. So far, all our previous studies (Pouke et al., 2020, 2021) as well as this one have resulted in movie physics appearing as the plausible physics model. This is especially surprising in this study because it included a condition in which neither the scale of the participants nor their perception of sizes and distances, were not manipulated on purpose. We suspect that these results were not due to the existence or lack of a body-ownership illusion, but due the visual appearance and human-like motions of the virtual character. In order to understand the phenomenon regarding plausibility of small-scale rigid body dynamics, it is necessary to conduct more studies involving conditions in which participants are expected, for all intents and purposes, to choose true physics as the plausible model. Another surprise was the inverse result regarding object size estimations as the result of body scaling. For this, we suspect that a visual property of the VE, perhaps the length of the virtual exam table, interfered with the participants’ sense of their own body size. An obvious follow-up study to examine the relationship between body-scaling and physics plausibility would be to utilize visible first person avatars of different sizes. Our results show, however, that a different way to represent the physics models is necessary than the one used in this study. In conclusion, further experiments are needed to discover the reasons why unexpected results were obtained regarding both physics plausibility estimations and the inverse effect found in object size estimations.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
The studies involving human participants were reviewed and approved by The Ethics Committee of Human Sciences of University of Oulu. The patients/participants provided their written informed consent to participate in this study. Written informed consent was obtained from the individual(s) for the publication of any potentially identifiable images or data included in this article.
MP and SL devised the overall research scope. MP developed the experimental applications and was responsible for the overall design and execution of the studies. EC assisted in experimental application design, study design, data collection, and data analysis. SP and AC performed the data collection. The manuscript was written by MP, EC, AC, TO, and SL.
This work was supported by the Academy of Finland projects PIXIE 331822, PERCEPT 322637, SRC of Academy of Finland project COMBAT 293389, Business Finland project HUMOR 3656/31/2019, and the European Research Council project ILLUSIVE 101020977.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
We wish to thank all our participants for volunteering in this study.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frvir.2022.869603/full#supplementary-material
1https://osf.io/4gjv3/?view_only=b20e3e383852456eafb1225e34a85617
Banakou, D., Groten, R., and Slater, M. (2013). Illusory Ownership of a Virtual Child Body Causes Overestimation of Object Sizes and Implicit Attitude Changes. Proc. Natl. Acad. Sci. U.S.A. 110, 12846–12851. doi:10.1073/pnas.1306779110
Bhalla, M., and Proffitt, D. R. (1999). Visual-motor Recalibration in Geographical Slant Perception. J. Exp. Psychol. Hum. Percept. Perform. 25, 1076–1096. doi:10.1037/0096-1523.25.4.1076
Botvinick, M., and Cohen, J. (1998). Rubber Hands 'feel' Touch that Eyes See. Nature 391, 756. doi:10.1038/35784
Bürkner, P.-C. (2017). Brms: An R Package for Bayesian Multilevel Models Using Stan. J. Stat. Soft. 80, 1–28. doi:10.18637/jss.v080.i01
Deng, Z., and Interrante, V. (2019). “Am I Floating or Not?: Sensitivity to Eye Height Manipulations in Hmd-Based Immersive Virtual Environments,” in ACM symposium on applied perception 2019, 1–6.
Hutchison, J. J., and Loomis, J. M. (2006). Does Energy Expenditure Affect the Perception of Egocentric Distance? a Failure to Replicate Experiment 1 of Proffitt, Stefanucci, Banton, and Epstein (2003). Span. J. Psychol. 9, 332–339. doi:10.1017/s1138741600006235
Jeffreys, H. (1961). “Theory of Probability, Harold Jeffreys,” in International series of monographs on physics.
Jörges, B., and López-Moliner, J. (2017). Gravity as a Strong Prior: Implications for Perception and Action. Front. Hum. Neurosci. 11, 203. doi:10.3389/fnhum.2017.00203
Kim, J., and Interrante, V. (2017). “Dwarf or Giant: the Influence of Interpupillary Distance and Eye Height on Size Perception in Virtual Environments,” in 27th International Conference on Artificial Reality and Telexistence, ICAT 2017 and the 22nd Eurographics Symposium on Virtual Environments, EGVE 2017 (Eurographics Association), 153–160.
Langbehn, E., Bruder, G., and Steinicke, F. (2016). “Scale Matters! Analysis of Dominant Scale Estimation in the Presence of Conflicting Cues in Multi-Scale Collaborative Virtual Environments,” in 2016 IEEE Symposium on 3D User Interfaces (3DUI) (Greenville, SC, USA: IEEE), 211–220. doi:10.1109/3dui.2016.7460054
Lee, M. D., and Wagenmakers, E.-J. (2014). Bayesian Cognitive Modeling: A Practical Course. Cambridge: Cambridge University Press.
Linkenauger, S. A., Ramenzoni, V., and Proffitt, D. R. (2010). Illusory Shrinkage and Growth. Psychol. Sci. 21, 1318–1325. doi:10.1177/0956797610380700
Makowski, D., Ben-Shachar, M., and Lüdecke, D. (2019). Bayestestr: Describing Effects and Their Uncertainty, Existence and Significance within the Bayesian Framework. Joss 4, 1541. doi:10.21105/joss.01541
Maselli, A., and Slater, M. (2013). The Building Blocks of the Full Body Ownership Illusion. Front. Hum. Neurosci. 7, 83. doi:10.3389/fnhum.2013.00083
McIntyre, J., Zago, M., Berthoz, A., and Lacquaniti, F. (2001). Does the Brain Model Newton's Laws? Nat. Neurosci. 4, 693–694. doi:10.1038/89477
Millet, G., Lécuyer, A., Burkhardt, J.-M., Haliyo, D. S., and Régnier, S. (2008). “Improving Perception and Understanding of Nanoscale Phenomena Using Haptics and Visual Analogy,” in International Conference on Human Haptic Sensing and Touch Enabled Computer Applications (Berlin, Germany: Springer), 847–856.
Morey, R. D., and Rouder, J. N. (2021). Data from: BayesFactor: Computation of Bayes Factors for Common Designs. R package version 0.9.12-4.3.
Ogawa, N., Narumi, T., and Hirose, M. (2017). “Distortion in Perceived Size and Body-Based Scaling in Virtual Environments,” in Proceedings of the 8th Augmented Human International Conference (ACM), 35. doi:10.1145/3041164.3041204
Ogawa, N., Narumi, T., and Hirose, M. (2019). “Virtual Hand Realism Affects Object Size Perception in Body-Based Scaling,” in 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR) (Osaka, Japan: IEEE), 519–528. doi:10.1109/vr.2019.8798040
Pouke, M., Mimnaugh, K. J., Chambers, A. P., Ojala, T., and LaValle, S. M. (2021). The Plausibility Paradox for Resized Users in Virtual Environments. Front. Virtual Real. 2, 48. doi:10.3389/frvir.2021.655744
Pouke, M., Mimnaugh, K. J., Ojala, T., and LaValle, S. M. (2020). “The Plausibility Paradox for Scaled-Down Users in Virtual Environments,” in 2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR) (Atlanta, GA, USA: IEEE), 913–921. doi:10.1109/vr46266.2020.00014
Renner, R. S., Velichkovsky, B. M., and Helmert, J. R. (2013). The Perception of Egocentric Distances in Virtual Environments - A Review. ACM Comput. Surv. 46, 1–40. doi:10.1145/2543581.2543590
Senot, P., Zago, M., Lacquaniti, F., and McIntyre, J. (2005). Anticipating the Effects of Gravity when Intercepting Moving Objects: Differentiating up and Down Based on Nonvisual Cues. J. Neurophysiology 94, 4471–4480. doi:10.1152/jn.00527.2005
Serino, S., Scarpina, F., Chirico, A., Dakanalis, A., Di Lernia, D., Colombo, D., et al. (2020). Gulliver's Virtual Travels: Active Embodiment in Extreme Body Sizes for Modulating Our Body Representations. Cogn. Process 21, 509–520. doi:10.1007/s10339-020-00977-5
Sitti, M. (2007). Microscale and Nanoscale Robotics Systems [grand Challenges of Robotics]. IEEE Robot. Autom. Mag. 14, 53–60. doi:10.1109/mra.2007.339606
Skarbez, R., Brooks, F. P., and Whitton, M. C. (2017a). A Survey of Presence and Related Concepts. ACM Comput. Surv. (CSUR) 50, 1–39.
Skarbez, R., Neyret, S., Brooks, F. P., Slater, M., and Whitton, M. C. (2017b). A Psychophysical Experiment Regarding Components of the Plausibility Illusion. IEEE Trans. Vis. Comput. Graph. 23, 1369–1378. doi:10.1109/tvcg.2017.2657158
Slater, M., Perez-Marcos, D., Ehrsson, H. H., and Sanchez-Vives, M. V. (2009). Inducing Illusory Ownership of a Virtual Body. Front. Neurosci. 3, 214–220. doi:10.3389/neuro.01.029.2009
Slater, M., Perez-Marcos, D., Ehrsson, H. H., and Sanchez-Vives, M. V. (2008). Towards a Digital Body: the Virtual Arm Illusion. Front. Hum. Neurosci. 2, 6. doi:10.3389/neuro.09.006.2008
Slater, M., Usoh, M., and Steed, A. (1994). Depth of Presence in Virtual Environments. Presence Teleoperators Virtual Environ. 3, 130–144. doi:10.1162/pres.1994.3.2.130
Usoh, M., Catena, E., Arman, S., and Slater, M. (2000). Using Presence Questionnaires in Reality. Presence Teleoperators Virtual Environ. 9, 497–503. doi:10.1162/105474600566989
Van Der Hoort, B., and Ehrsson, H. H. (2016). Illusions of Having Small or Large Invisible Bodies Influence Visual Perception of Object Size. Sci. Rep. 6, 34530–34539. doi:10.1038/srep34530
Van der Hoort, B., and Ehrsson, H. H. (2014). Body Ownership Affects Visual Perception of Object Size by Rescaling the Visual Representation of External Space. Atten. Percept. Psychophys. 76, 1414–1428. doi:10.3758/s13414-014-0664-9
Van Der Hoort, B., Guterstam, A., and Ehrsson, H. H. (2011). Being Barbie: The Size of One's Own Body Determines the Perceived Size of the World. PloS one 6, e20195. doi:10.1371/journal.pone.0020195
van Doorn, J., Ly, A., Marsman, M., and Wagenmakers, E.-J. (2020). Bayesian Rank-Based Hypothesis Testing for the Rank Sum Test, the Signed Rank Test, and Spearman's ρ. J. Appl. Statistics 47, 2984–3006. doi:10.1080/02664763.2019.1709053
Wagenmakers, E.-J., Verhagen, J., Ly, A., Matzke, D., Steingroever, H., Rouder, J. N., et al. (2017). The Need for Bayesian Hypothesis Testing in Psychological Science. Psychol. Sci. under Scrut. Recent Challenges Propos. Solutions 2017, 123–138. doi:10.1002/9781119095910.ch8
Weber, S., Mast, F. W., and Weibel, D. (2020). Body Size Illusions Influence Perceived Size of Objects: a Validation of Previous Research in Virtual Reality. Virtual Real. 24, 385–397. doi:10.1007/s10055-019-00402-z
Keywords: virtual reality, perception, scaling, embodiment, human factors, plausibility
Citation: Pouke M, Center EG, Chambers AP, Pouke S, Ojala T and Lavalle SM (2022) The Body Scaling Effect and Its Impact on Physics Plausibility. Front. Virtual Real. 3:869603. doi: 10.3389/frvir.2022.869603
Received: 04 February 2022; Accepted: 10 May 2022;
Published: 26 May 2022.
Edited by:
Michael Madary, The University of the Pacific, United StatesReviewed by:
David Lindlbauer, Carnegie Mellon University, United StatesCopyright © 2022 Pouke, Center, Chambers, Pouke, Ojala and Lavalle. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Matti Pouke, bWF0dGkucG91a2VAb3VsdS5maQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.