 Charlotte Croucher
Charlotte Croucher Wendy Powell
Wendy Powell Matt Dicks
Matt Dicks Brett Stevens
Brett Stevens Vaughan Powell1
Vaughan Powell1
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Virtual Real., 29 April 2021
Sec. Virtual Reality in Medicine
Volume 2 - 2021 | https://doi.org/10.3389/frvir.2021.621965
This article is part of the Research TopicExploring Human-Computer Interactions in Virtual Performance and Learning in the Context of Rehabilitation.View all 11 articles
Virtual reality is increasingly used in rehabilitation and can provide additional motivation when working toward therapeutic goals. However, a particular problem for patients regards their ability to plan routes in unfamiliar environments. Therefore, the aim of this study was to explore how visual cues, namely embedded context-sensitive attractors, can guide attention and walking direction in VR, for clinical walking interventions. This study was designed using a butterfly as the embedded context-sensitive attractor, to guide participant locomotion around the clinical figure of eight walk test, to limit the use of verbal instructions. We investigated the effect of varying the number of attractors for figure of eight path following, and whether there are any negative impacts on perceived autonomy or workload. A total of 24 participants took part in the study and completed six attractor conditions in a counterbalanced order. They also experienced a control VE (no attractors) at the beginning and end of the protocol. Each VE condition lasted a duration of 1 min and manipulated the number of attractors to either singular or multiple alongside, the placement of turning markers (virtual trees) used to represent the cones used in clinical settings for the figure of eight walk test. Results suggested that embedded context-sensitive attractors can be used to guide walking direction, following a figure of eight in VR without impacting perceived autonomy, and workload. However, there appears to be a saturation point, with regards to effectiveness of attractors. Too few objects in a VE may reduce feelings of intrinsic motivation, and too many objects in a VE may reduce the effectiveness of attractors for guiding individuals along a figure of eight path. We conclude by indicating future research directions, for attractors and their use as a guide for walking direction.
Virtual Reality (VR) technology may be introduced into both clinical and community-based environments and has supported patients in a range of therapeutic activities. Examples include training for function led tasks (e.g., crossing a road, or shopping in a supermarket) (Corbetta et al., 2015; Dawson and Marcotte, 2017; Parsons et al., 2017), and construct led tasks, sometimes referred to as “exergames” (Dawson and Marcotte, 2017). Both function led, and construct led tasks can be managed safely (Fox et al., 2009; Borrego et al., 2016), and provide additional motivation in VR (Cikajlo et al., 2020), thus reducing patient boredom, increase patient motivation and compliance to engage with therapeutic activities (Chen et al., 2020). Although, VR supports a variety of different therapeutic activities, explicit instructions are often provided verbally to guide a patient through a task (Johnson et al., 2013; Jie et al., 2018; Mak et al., 2018; Kleynen et al., 2019). Information provided typically regards motor movement and technique performance (Denneman et al., 2018; Gokeler et al., 2019). However, this may increase reliance on declarative knowledge, increasing working memory due to patients having to remember and recall instructions and movement sequences (Buszard et al., 2017), and thus reduce movement automaticity (Denneman et al., 2018; Johnson et al., 2019). Implicit instructions can target these problems (Gokeler et al., 2019; Dahms et al., 2020), focus of implicit instructions in VR may be placed upon how a patient moves, often regarding the adaption of movement, based upon visual guidance (Anglin et al., 2017; Bonnette et al., 2020), for example, some applications have used biofeedback in conjunction with visual shape matching (Bonnette et al., 2020).
A particular challenge for patients when discharged to community-based environments is the ability to plan routes in unfamiliar environments, and partake in outdoor recreational activities (Palstam et al., 2019). This can lead to a decrease in social and familial interaction (Liu and Ng, 2019; Palstam et al., 2019), and thereby a decreased quality of life (Corbetta et al., 2015; Liu and Ng, 2019). Therefore, focus to address this problem could be placed upon introducing scenarios, that develop patient's route planning and anticipatory movements toward different simulated environments. Additionally, autonomy supported motivation may further support effective motor (re)learning (Wulf et al., 2015; Lemos et al., 2017). When a patient responds to controlled events, they might experience less autonomy, as their motivation is generated through controlled means (Keatley et al., 2013). A motivational theory which considers both controlled and autonomous motivation along a continuum is “Self-Determination Theory” (SDT) (Ryan and Deci, 2017). Within SDT there are three fundamental psychological needs including: autonomy, competence and relatedness (Ryan and Deci, 2017). When these needs are fulfilled, they may support patient confidence and may lead to an increase in physical activity (Sweet et al., 2012). Furthermore, it is important that the opportunities for patients to practice their decision making and anticipatory skills are developed within the safety of clinical environments (Johnson et al., 2013), ensuring that patients' skills are appropriately assessed by clinicians with regards to everyday functional tasks (Jie et al., 2018).
During everyday functional tasks, both curved and straight walking are utilized to navigate around obstacles in an environment (Schack et al., 2019). A widely-used walking intervention which assesses both straight and curved path walking is the “figure of eight walk test” (FO8WT) (Hess et al., 2010; Wong et al., 2013; Welch et al., 2016). However, if focus is placed upon patients' planning and anticipatory movements when implementing the FO8WT into VR, there needs to be balance between providing enough information to guide the patient along the figure of eight path whilst supporting autonomy to allow the patient to make their own navigational decisions. This raises the question of how the design of VR rehabilitation applications can accommodate the required information for the FO8WT through visual guidance mechanisms to complete relevant clinical activities/assessments, promote aspects of SDT (autonomy, competence, and relatedness), and reduce impact on working memory.
Visual guidance approaches such as manipulation of optic flow for example, increasing vection have previously been used to induce postural adjustments in individuals to alter the direction of navigation during walking (Furukawa et al., 2011). Similarly, redirected and reorientation techniques may make use of environmental and/or perspective manipulation to alter a user's path in both the virtual environment (VE) and the physical tracked space (Vasylevska et al., 2013; Nilsson et al., 2018). The manipulations introduced in extant literature have meant that users must compensate for differences between visual, vestibular, and somatosensory information to alter their walking direction, often without awareness (Vasylevska et al., 2013; Langbehn et al., 2017). Alongside visual manipulation approaches, haptic feedback can be used to induce changes in walking direction. One example, is the use of robotic guide dogs, who can help to guide the visually impaired safely along paths (Chuang et al., 2018), which may be implemented so that the user holds onto a cane/handle (Chuang et al., 2018), and when the robot turns the user receives haptic feedback based on the mass of the robot indicating movement (Hersh and Johnson, 2010). Another example is galvanic vestibular stimulation in which the placement of electrodes behind an individual's ear, can induce postural adjustments through the use of electrical currents (Maeda et al., 2005). Galvanic vestibular stimulation has been used to support reorientation techniques. For example, Sra (2017) made use of three different electrical current variations to elicit three different balance responses in order to influence walking direction (Sra, 2017). Even though these approaches have been shown to induce changes in walking directions, they require the user to compensate for any changes, and therefore in this context, it may be that these visual guidance mechanisms may not provide an appropriate level of autonomy.
If we wish to support navigational decisions and autonomy, we need to foster opportunities that can influence guidance, whilst reducing reliance on postural adjustment responses. Instead providing opportunities for individuals to respond as they would like, without negative consequences would appear particularly beneficial. Thus, an important consideration when designing visual guidance with the use of head-mounted display (HMD) VR applications is that the user can look freely around the VE. Consequently it is harder to visually guide their attention toward an intended direction (Grogorick et al., 2018). Whilst traditional visual guidance principles such as signs, maps, and continuous lines can be used in VR to aid in directing attention toward an intended area (Miller, 1992; Vilar et al., 2014), they can be obtrusive, and distracting from a given task (Grogorick et al., 2018). Therefore, subtle approaches to guidance can be considered, such as manipulation of light and artificial markers (e.g., colored dot) (Grogorick et al., 2018). However, for guidance purposes, current subtle approaches such as a colored dot may not appear natural within in a VE. Consequently, if a VR application is being used within the context of training applications these approaches should be used minimally, to ensure immersion remains high and increases the learning potential of an application (Lin et al., 2012; Cuperus et al., 2018; Grogorick et al., 2018).
VR based research areas such as cinematic VR, use visual saliency to attract attention (Nielsen et al., 2016), whilst redirected and reorientation techniques may make use of distractors as well as attractors in order to guide attention away from manipulations in a VE (Peck et al., 2009; Sra et al., 2018). Distractors used in redirected walking often gravitate toward explicit cues (Peck et al., 2009), where explicit cues are defined by Nielsen and collegaues (Nielsen et al., 2016), as using explicit communication to direct attention toward a certain object (Nielsen et al., 2016), for example with having to keep a distractor within their field of view, to aid unnoticeable rotational manipulations (Peck et al., 2009). Distractors may also be used in conjunction with audio only or a mixture of both visual and audio distractors, to guide navigation in a virtual environment (Rewkowski et al., 2019). In contrast attractors are often embedded into the design of a VE, and become the forefront for interaction within a VE (Sra et al., 2018). In particular embedded context-sensitive attractors are objects which are appropriate within a VE setting, which ensures that they are representative and designed with relation to the task and VE (Sra et al., 2018). However, current attractor approaches, in redirected walking techniques have been used in strict path following scenarios (Sra et al., 2018), and have not explored the design of attractors within autonomy based scenarios. Therefore, the primary aim of this study was to investigate how the design of embedded context-sensitive attractors may guide attention and walking direction in VR, during explorative walking, to invite the completion of the clinical FO8WT. The secondary aim was to ascertain whether the use of embedded context-sensitive attractors provided a sense of autonomy and minimized perceived workload in participants.
We conducted a within-subjects experiment designed to examine the use of embedded context-sensitive attractors to convey instructions to walk a figure of eight path in a VE, when participants are given the opportunity to explore and of the effect of such attractors on perceived autonomy, and perceived workload. These studies were conducted at the University of Portsmouth (UK), and ethical approval was provided from the Faculty of Creative and Cultural Industries.
To examine the effect of attractors and their effectiveness of providing information for completing the clinical FO8WT in VR, the participants were encouraged to explore the VR tracked space, making use of one-to-one mapping. The FO8WT may vary in length from 1.5 × 1.2 m (Hess et al., 2010), to the length of 10 m (Barnett et al., 2016). However, VR room-scale tracking spaces are ~5 m (Langbehn et al., 2017). Therefore, it was decided that the representation of the FO8WT should be smaller than 5 m, but larger than 2 m in length to ensure continuity with other room-scale VR setups. Additional considerations include the assessment criteria in the FO8WT i.e., speed, amplitude (number of steps) and the accuracy of their turn (Hess et al., 2010; Odonkor et al., 2013; Barker et al., 2019). Therefore, elements used within the FO8WT such as cones (turning markers) should be considered when implementing the walk test into VR (Hess et al., 2010), being mindful that when represented in a VE, they make logical sense within the context of the setting. However, it is not known whether the use of turning markers will impact the guidance from the attractors. Therefore, turning markers will be present in some VE conditions and not others (Figure 2). Based on the application aiming to provide a sense of autonomy and using visual guidance mechanisms as instructions it was important to move away from architectural spaces and paths to reduce the number of confined paths within the VE (Bruder et al., 2013; Vasylevska et al., 2013; Nilsson et al., 2018). Therefore, in order to implement a VE that is not limited by confined paths, the present study made use of a natural environment—namely a forest—to overcome challenges of scale and shape in the VE, whereby the turning markers were replaced by trees. To, ensure similarity with the FO8WT though, participants started at the center of the FO8WT (Welch et al., 2016).
To ensure that the attractor was easily distinguishable within the VE, saliency properties including color, contrast, form, motion, location and size (Nielsen et al., 2016; Davis et al., 2017), were taken into consideration. Color is a saliency property which is considered relatively stable even with older populations (Davis et al., 2017), and objects which have complementary colors such as red and green are thought to be more noticeable (Thorpert et al., 2019). However, based on some types of color blindness, it is important to ensure that color is not the only saliency property. Moving objects are reported to attract large amounts of attention (Rothe and Hußmann, 2018; Yang et al., 2018), even in the absence of sounds (Rothe and Hußmann, 2018), and therefore, movement animation was added to the attractors.
To ensure that the attractor was representative of something found in a forest environment a “monarch butterfly” was chosen to represent the attractor(s) (Figure 1). The trees, and attractor were created using 3D Studio Max, and textured using Adobe Photoshop (Tree Material Reference Images (Textures.com, 2017a,b,c,d) and Substance Painter (hand-drawn texture for attractor). Due to the small size of the attractor, and the use of trees to represent turning markers in some conditions, it was important to acknowledge that dependent on the attractor and participant location visibility to the attractor may be reduced. Therefore, the number of attractors used were altered from either 1–3 (Figure 2). In order to guide walking direction along a figure of eight path, the location of the attractor(s) responded dynamically to participants' position within the VE. The attractor(s) were programmed to move along the same pre-defined figure of eight path in each VE condition, but only when the participant was moving behind the attractor(s) and along the path in the correct direction. This was implemented with the use of a trigger box (not visible to participants) surrounding the attractors (which was the same size in all VE conditions, including when the attractors are not visible in the control conditions), in which the participants would trigger the attractors movement along the path, if they were behind the attractor(s) but still within the trigger box. The attractors would then move forward along the pre-defined figure of eight path until, the participants were no longer within the trigger box. Therefore, the speed of the attractors was not predefined but kept relative to the speed of the participants. Within eye movement literature, it is suggested that point of gaze is often kept slightly below the horizon line (Foulsham et al., 2011; Vansteenkiste et al., 2014; Tong et al., 2017). Therefore, the position of attractor(s) were kept just below the horizon line, at a height of 1.5 m.
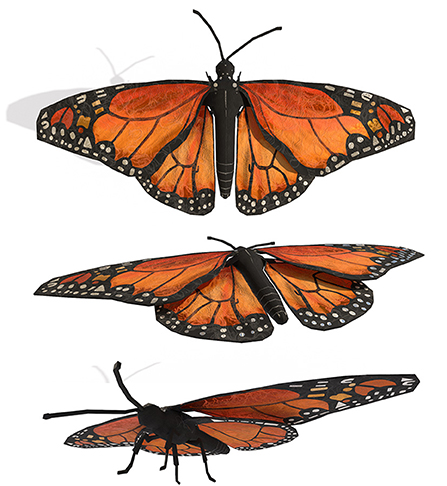
Figure 1. Embedded context-sensitive attractor.
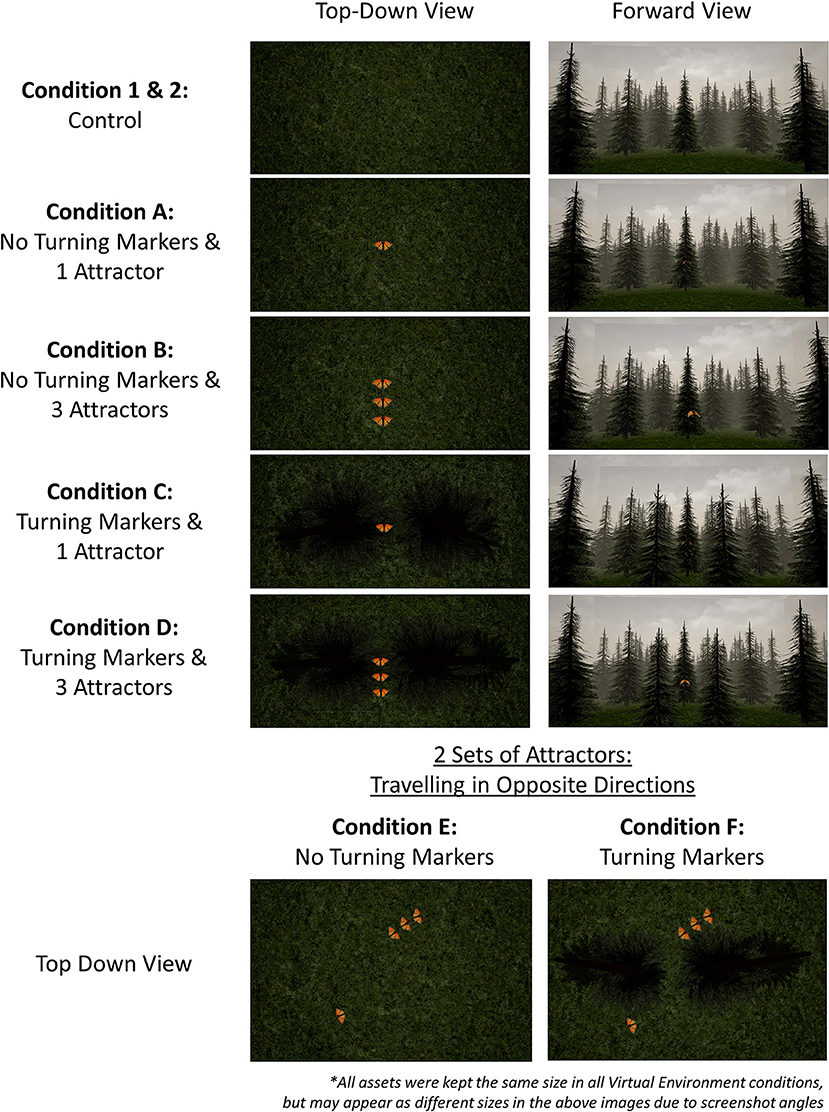
Figure 2. Virtual environment conditions.
Based upon the attractors introducing an affordance within the VEs, it was hypothesized that the use of attractor(s) will lead to a significant difference in participants following the figure of eight path, when compared to no attractor(s). The implementation of turning markers and increased amount of attractors, were design decisions to ascertain whether they had any impact on guidance, perceived autonomy and perceived workload.
Two additional conditions were added to investigate whether participants would always follow the same set of attractors, when presented with two different sets of attractors (1 or 3 Attractors) which moved at the same time in the opposite direction of the figure of eight path (Figure 2).
Twenty-four Participants (11 Male, 13 Female) aged 21–65 (M = 34.25, SD = 11.29) were recruited from staff and students at the University of Portsmouth, and via word of mouth. All participants completed the experiment and were naïve to all experimental conditions. They did not receive any compensation for taking part in the study. The total duration of the study for each participant was ~1 h.
Participants were briefed on the procedure and safety of the study. Once consent was obtained, participants completed a demographics questionnaire (Table 1).
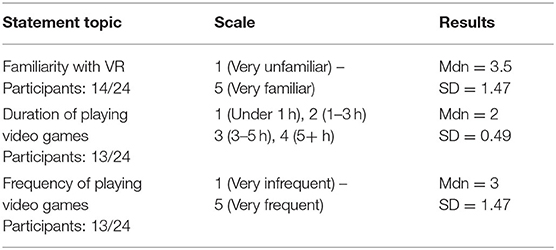
Table 1. Demographics questionnaire results.
The participants were informed that there were different VEs within this study, and that the researchers would be unable to respond to any questions during the experiment. Their task in each VE remained the same in which they were free to explore the VEs so long as they stayed within the tracked space. Participants were directed to the starting location, indicated by a cross on the floor (Figure 3), and instructed for that VE (which remained the same for each VE) “you have one minute to walk wherever you like, without walking outside of the blue cage, which is for your safety.”
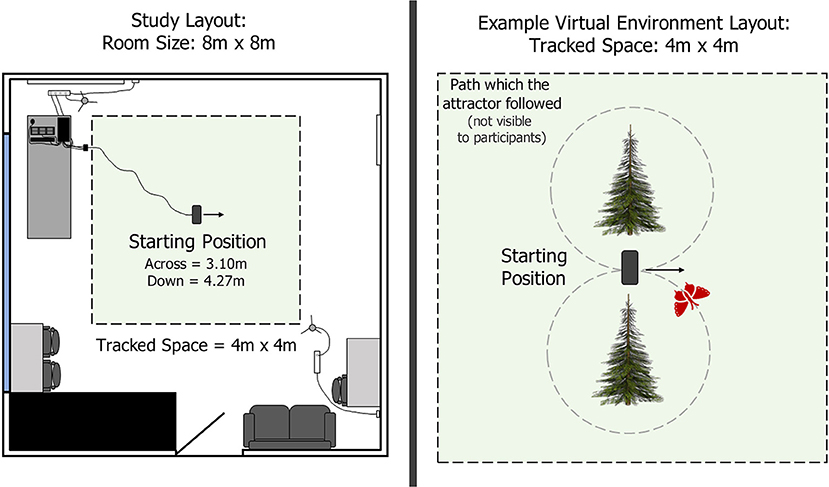
Figure 3. Room and example virtual environment layouts.
Each participant experienced the attractors based VE conditions in a counter-balanced order, with the control conditions (no attractor and no turning markers), being present both at the very beginning and end of the study. In each condition, participants were given 1 min to explore the VE. The chosen duration of 1 min has been used in a similar assessment of dynamic balance when walking along a FO8 path (Gil-Gómez et al., 2011). In between each VE condition, the participants answered questionnaires, whilst they were seated without the HMD.
The VEs were loaded by the researcher in the pre-defined sequence for each participant once the participants were standing on the starting position and facing the correct direction. The VE faded to black for the 10 s at the beginning of each condition, as an adjustment period for each participant.
The study took place in an 8 × 8 m laboratory, with a 4 × 4m tracked space. All objects were kept securely out of the way, and any wires were taped down around the edge of the room. Participants wore the HTC vive 2016 HMD for ~10 min altogether and were instructed to take breaks if needed. For participant safety, the HTC vive guardian boundary was included and appeared when the participant moved toward the edge of the 4m2 tracked area, this was referred to as the “blue cage” when talking to participants. Positional data (X, Y, and Z) from the HMD was recorded from the HTC vive lighthouses® continuously at 6 hz. The VE conditions were designed to be symmetrical, in both the X and Y axis, in order not to introduce directional bias and were rendered in real time using Unreal Engine 4.14.
Participant and attractor(s) trajectories were recorded in cm by measuring the x and y co-ordinates of every 10th of a second, with the participants location was recorded from the position of the HMD. The distance in which participants followed the figure of eight path was calculated taking the sum of the Euclidean distances calculated from the attractor coordinates. To analyze whether participants followed one particular set of attractors over the other (1 or 3 attractors), the sum of total time followed in seconds was computed. Calculated by taking the smallest Euclidean distance between the participants to the moving attractors indicating whether the participant was following the set with 1 attractor or 3 attractors. Euclidean distance was also used to calculate the largest distance a participant deviated away from the attractor(s).
Self-determination was measured using the 22 statement task evaluation questionnaire (Self-Determination, 2020), which is a subset of the intrinsic motivation inventory (IMI) (Ryan, 1982; Deci et al., 1994). There are four subscales that make up the task evaluation questionnaire including: interest and enjoyment (considered a subscale of intrinsic motivation), perceived competence, perceived choice and pressure/tension (considered as a negative predictor of intrinsic motivation) (Deci et al., 1994). The ending of statement 7 was altered from “I think I did pretty well at this activity, compared to other students” “…to other participants.” Although, each participant would have been the only person currently undertaking the activity of exploring the VE they were asked to make their own judgement of how well they think they did. This statement is used in the calculation of perceived competence (Deci et al., 1994), this subscale needs to be analyzed with consideration that they were naïve to experimental conditions, and were the only people taking part in the experiment at a given time. Therefore, analysis focused upon whether they felt there was any difference within the conditions.
The modified NASA—Task Load Index (NASA-TLX) was used to measure perceived workload (Hart, 2006; Bustamante and Spain, 2008). The chosen approach to using the NASA-TLX was to use the shorter version, as the weighted version can be time consuming (Hart, 2006; Bustamante and Spain, 2008), and may introduce participant errors (Bustamante and Spain, 2008).
There were two participants with tracking issues regarding the first control condition only. One participant had an HMD tracking error, in which they had a fixed offset of −94 on the x axis, for the first control only. Although the participant trajectory can be easily translated, due to the implementation of the attractors correspondence along the figure of eight path raises concerns over accuracy. In addition, another participant completely lost tracking data. Therefore, both participants were excluded from trajectory-based data analysis, for the following variables: following of the attractor(s) and largest distance away from attractor(s), but not the two sets of attractors as this analysis was separate from the control conditions. All statistical analysis used a 95% confidence interval, unless otherwise stated.
The total distance in cm, that the participant followed the attractor(s) was not normally distributed at the 5% confidence interval level. Therefore, the non-parametric Friedman Test was used to compare the distance in cm, that the participant followed the attractor(s), in the control (averaged between the control at the beginning and end of the study), compared to the other VE attractor conditions. There was a significant difference = 15.72, p = 0.003, with regards to the total distance participants followed the attractor and the VE attractor conditions. Post-hoc analysis with the Wilcoxon signed-rank test were conducted with a Bonferroni correction applied, resulting in a significance level set at p < 0.005, there were 3 significant pairings (Table 2).
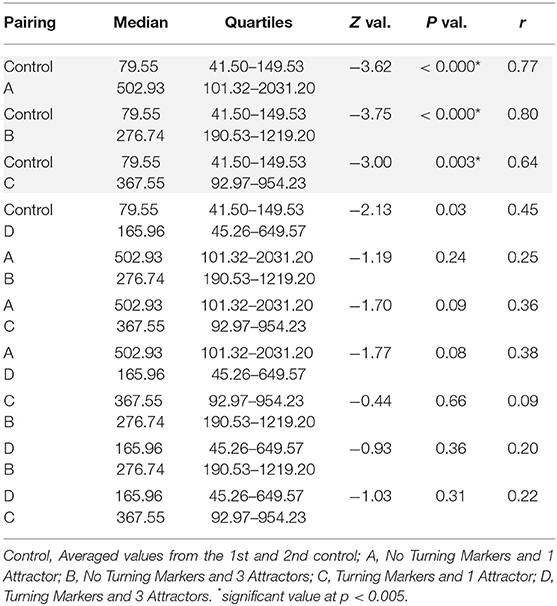
Table 2. Wilcoxon signed-rank test—distance spent following the attractor.
On visual observation of participant trajectories, some participants did not appear to follow the attractor once it was introduced but may still make both clockwise and anticlockwise turnings (Figure 4).
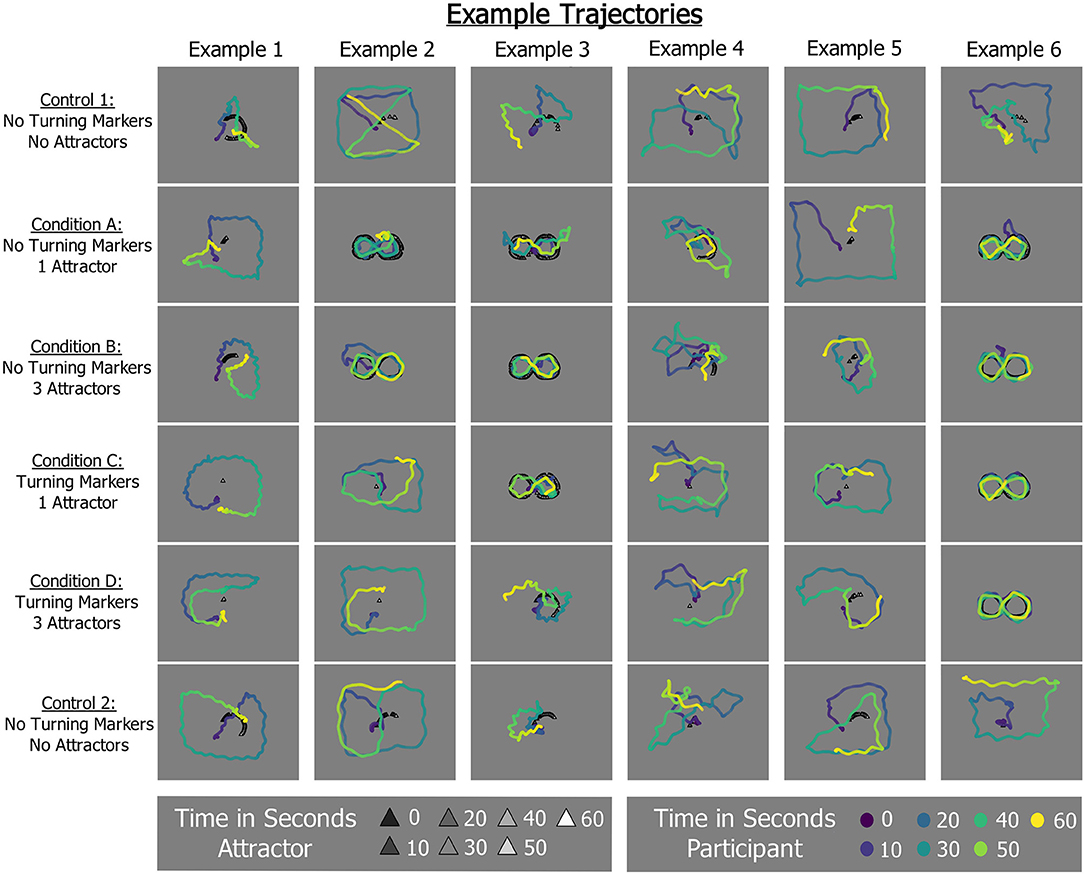
Figure 4. Example participant trajectories from each group—minus conditions E & F.
The largest distance away from the attractor(s) in cm, was not normally distributed at the 5% confidence interval level. Therefore, the non-parametric Friedman Test was used. There was a significant difference = 15.49, p = 0.004, with regards to the largest deviation away from the attractor and the VE attractor conditions. Post-hoc analysis with the Wilcoxon signed-rank test were conducted with a Bonferroni correction applied, resulting in a significance level set at p < 0.005, there were 3 significant pairings (Table 3).
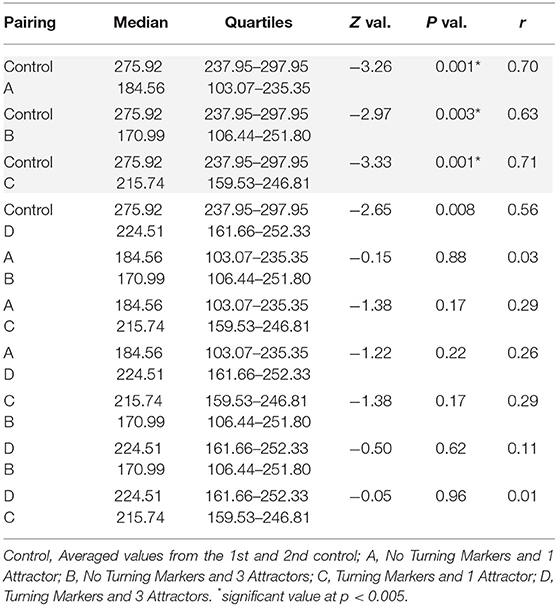
Table 3. Wilcoxon signed-rank test—largest distance away from attractor.
The total time in seconds, that the participants followed one set of attractors were not normally distributed at the 5% confidence interval level. Therefore, the results were analyzed using the non-parametric Friedman test to compare the time spent following one set of attractors (1 or 3 attractors) and the placement of turning markers in seconds. There was not a significant difference = 2.81, p = 0.42 (Table 4).

Table 4. Time spent following specific attractor set in seconds.
One participant was removed from statistical analysis within the task-evaluation questionnaire statistics as they had not completed all forms.
The non-parametric Friedman test was used to compare all the task-evaluation variables. There was a significant difference between the use of attractors and turning markers and the perceived interest and enjoyment scores (a measure of intrinsic motivation) = 31.56, p < 0.000. Post-hoc analysis with the Wilcoxon signed rank test were conducted with a Bonferroni correction applied, resulting in a significance level of p < 0.005, there were 5 statistically significant pairings (Table 5).
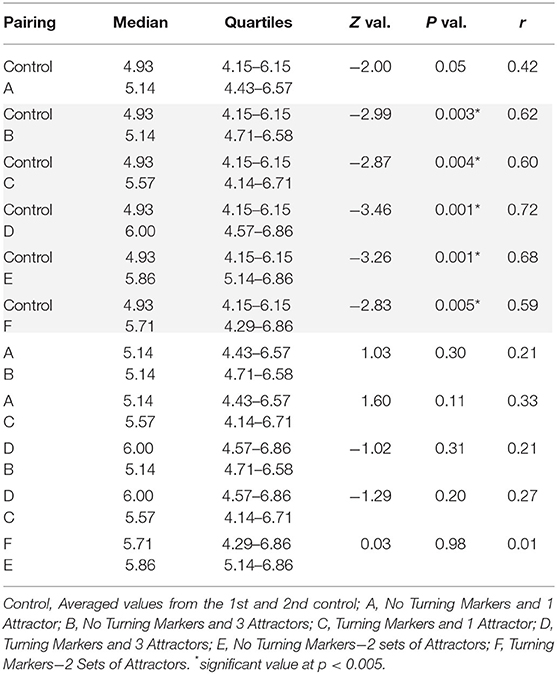
Table 5. Wilcoxon signed-rank test—interest and enjoyment scores.
There was a significant difference between the use of attractors and turning markers and the perceived “Pressure/Tension” (negative predictor of intrinsic motivation) scores = 23.52, p = 0.001. Post-hoc analysis with the Wilcoxon signed rank test were conducted with a Bonferroni correction applied, resulting in a significance level of p < 0.005, there were 2 statistically significant pairings (Table 6).
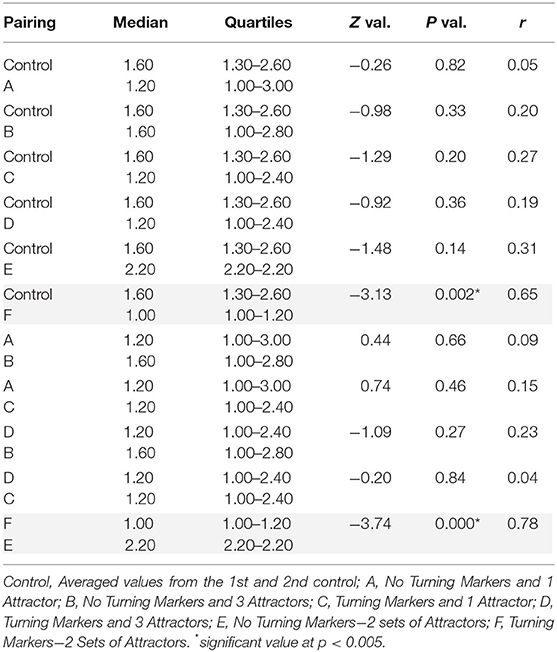
Table 6. Wilcoxon signed-rank test—pressure/tension scores.
There was not a significant difference between the use of attractors and turning markers and the perceived competence scores = 5.81, p = 0.45. Along with no significant difference between the use of attractors and turning markers, and the perceived choice scores = 8.28, p = 0.22 (Table 7).
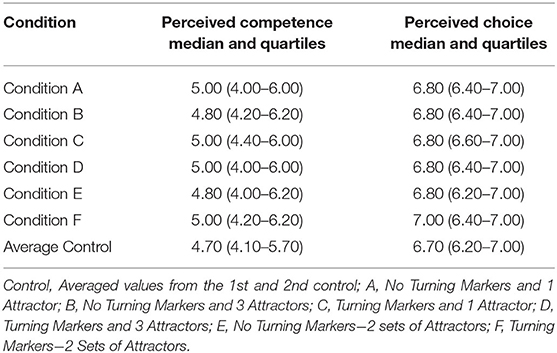
Table 7. Perceived competence and perceived choice—medians and quartile values.
The NASA-TLX results from all conditions were analyzed using the non-parametric Friedman Test and there was no statistical difference between any of the VE attractor conditions and the NASA-TLX variables (Mental Demand: = 10.64, p = 0.10, Physical Demand: = 4.81, p = 0.57, Temporal Demand: = 4.59, p = 0.60, Performance: = 6.22, p = 0.40, Effort: = 7.98, p = 0.24, Frustration: = 5.63, p = 0.47, Overall: = 5.15, p = 0.52) (Table 8).
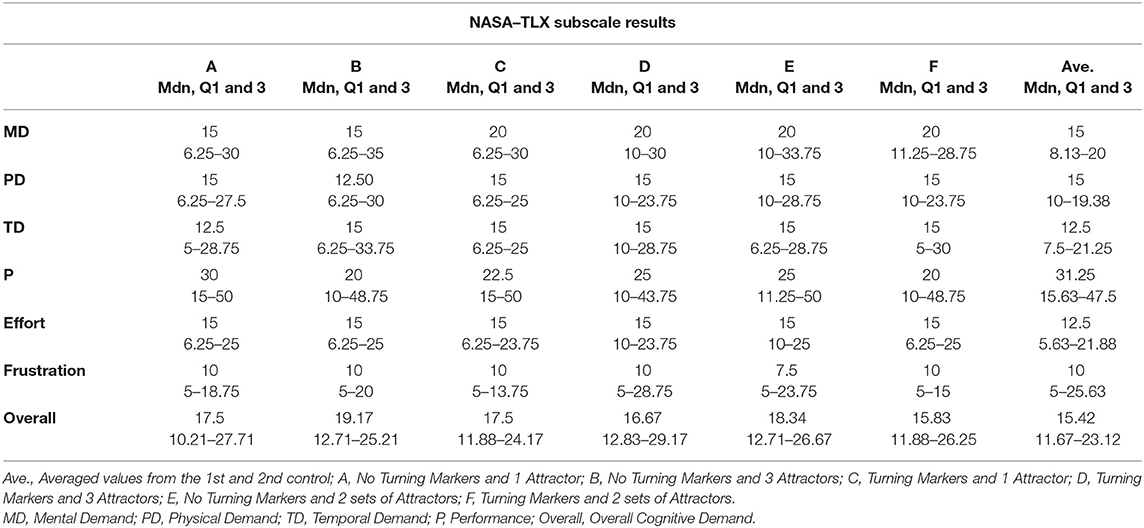
Table 8. NASA-TLX results.
This study explored how the use of visual attractors can be implemented for guidance in completing the clinical FO8WT, whilst keeping verbal instructions minimal. In addition, it examined whether the use of attractors in VEs can negatively impact perceived autonomy and workload. The results from this study indicate that, even when a verbal instruction encourages exploration, the use of attractors can guide walking direction with participants following an implied figure of eight path. This may be due to the implementation of the attractors, in which there is an action and feedback loop provided to participants. Where movement of the attractors along a predefined figure of eight path, occurs if the participant is behind the attractors and within a trigger box (not visible to participants), thus providing a (perceived) affordance for the participants within the VEs (Norman, 1999; Lee et al., 2018). There was also a reduced distance away from the implied path with the introduction of the attractor(s). The use of attractors being effective at supporting guidance for where to move, aligns with existing literature in which visual guidance mechanisms have previously been used to support implicit motor (re)learning, and have focused upon how to move (Anglin et al., 2017; Baird and Stewart, 2018; Bonnette et al., 2020).
Although the attractors were found to be beneficial at guiding participants along a figure of eight path, condition D (Turning markers and 3 attractors) did not significantly differ from the average control (no attractors or turning markers). Upon observation of the participant trajectories there are some emergent patterns. Some participants appear to always follow the attractor; however, there were other participants who decreased in following the attractor when more attractors and turning markers were introduced.
This observation appears to suggest that an increase in objects in a VE may impact the effectiveness of guidance. The reason for this occurrence, may be visual crowding, as objects may become more difficult to differentiate (Whitney and Levi, 2011; Henry and Kohn, 2020). This is often as a result of attention and spatial integration (Henry and Kohn, 2020), in which the distance between objects in an environment are crucial for being able to identify a target object (Bouma, 1970; Whitney and Levi, 2011; Melnik et al., 2020). Although this study did not infer the attractors as a target object, participants may have identified this as a target object within the VE, however visual crowding may have occurred when placing more objects into the VE, making it more difficult to identify the attractors as a target object.
Alternative to the theory of visual crowding (Bouma, 1970), Schmitz and colleagues (Schmitz et al., 2020) suggest that individuals may become desensitized to visual cues, due to constant stimulation. However, it is perhaps unlikely that this explains why following of the implied path in condition D (turning markers and 3 attractors) did not significantly differ from the average control (no attractors or turning markers), as participants only experienced all attractor conditions for a total of 6 min, in a counter-balanced order. This raises important questions as to whether there are saturation points of attractors and other visual methods when guiding attention.
The secondary aim of this study was to ascertain whether the use of attractors provided a sense of autonomy and minimized the impact of perceived workload in participants. Although this study was conducted with adults that were not undergoing rehabilitation, the results indicated that not only did the design of attractors provide guidance for following an implied figure of eight path but do not negatively impact perceived choice (range 6.7–7) or workload (reported low to medium). The use of attractors was able to provide additional interest and enjoyment results (considered a subscale of intrinsic motivation), when compared to the control (except for condition A). This aligns with other work suggesting that simple scenes can convey information (Nielsen et al., 2016) but that open world environments provide more enjoyment (Ijaz et al., 2020). Furthermore, condition F (2 sets of attractors and turning markers) was perceived to have less pressure/tension than both the control and condition E (2 sets of attractors and no turning markers). Although these were significant differences, it is important to consider that these values were still mid to high for interest and enjoyment and low for pressure and tension. This is a beneficial aspect of the design of attractors, as intrinsic motivation may impact learning as a result of the individual behaving in a certain way because they desire to Ryan and Deci (2020). Therefore, it would be interesting to explore the use of attractors in the context of rehabilitation.
Ntoumanis et al. (2020) suggest that self-determination interventions in healthcare could be used to target autonomy, competence and relatedness at different intensity levels. Self-determination was measured in relation to design decisions, of both attractors and turning markers. Even though perceived competence did not significantly differ, in this study were the only individuals participating in the experiment at a given time and were required to be able to walk and stand without difficulty for 1-h. Therefore, in the context of rehabilitation attractors may elicit different perceived competence results, and future research will be needed to explore this further. Therefore, using attractors for guidance to complete clincal tests such as the FO8WT may be best used as an autonomy supportive intervention. Future research could explore, the use of attractors within the context of the FO8WT, but with focus placed upon how a patient moves, along with how they approach each aspect of the FO8WT (e.g., clockwise and anti-clockwise turns). This is particularly important as both curved, and straight walking are utilized in everyday walking (Schack et al., 2019), and require patients to use different muscles (Hess et al., 2010; Wong et al., 2013). This may interlink with research that considers patient confidence regarding their own motor capability, which is argued to interlink with patient motivation and continued recovery (Morris et al., 2017), and whether this may then impact how therapists target different patients motor (re)learning.
Additionally, even though this study had no significant statistical differences for preference of following a specific set of attractors in the two VE conditions where two attractor sets present (condition E and F), future research could explore differences between personal preferences and presenting two different types of attractors and the effect that this may have on guidance within a VE. As personal preference interlinks with the idea of enjoyment, it may explain the reason as to some of the observed behaviors such as participants avoiding the attractor, or always following the attractor regardless of other environmental aspects. Although it was not measured in the study, some of the participants stated that they disliked insects and therefore did not try to follow the butterflies whilst the opposite was true for other participants.
The overall results and observations from this study indicate that attractors can be used as guidance for completing a clinical FO8WT whilst allowing feelings of intrinsic motivation and decision-making opportunities. Although this study was conducted with a non-clinical group of participants, it is important to be mindful when using attractors in clinical settings, to consider the overall design of a VE. Insufficient attractors and additional environment objects may reduce feelings of intrinsic motivation or may become less effective for walking direction guidance. Both were observed in condition A (no turning markers and 1 attractor) and D (turning markers and 3 attractors). Furthermore, it is important to consider when implementing turning markers, the effects this may have on the tightness of turns from participants. For example, fir trees were used to represent turning markers in this application, but trees that are smaller or larger may provide different control with regards to size of turning circles. Furthermore, patient preference may interfere with the effectiveness of guidance so different ecologically valid attractors should be considered. However, it is important to be mindful of visual crowding and saliency as this can cause objects to appear similar (Melnik et al., 2020) and possibly decrease the effectiveness of the attractors. Therefore, we suggest that future research should explore (a) the effectiveness of attractors as instructions, alongside aspects of personal preference and saturation of interest, (b) the impact attractors have on how someone moves, both inside and outside of rehabilitation settings.
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
The studies involving human participants were reviewed and approved by University of Portsmouth Faculty of Creative and Cultural Industries. The participants provided their written informed consent to participate in this study.
The experiment was designed and conceptualized by CC, BS, and VP. The data acquisition was conducted by CC. Formal analysis was conducted by CC with statistical advice provided from MD. Supervision for this study was completed by WP, MD, BS, and VP. The author who took lead on writing the manuscript was CC and main feedback with edits were provided by WP. All authors contributed feedback to the final version of the manuscript.
This work was funded by the Faculty of Creative and Cultural Industries at the University of Portsmouth.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Programming support for the application, was completed by Jahangir Uddin at the University of Portsmouth and an additional, thank you to various individuals who held the HTC VIVE cables away from participants during the study sessions.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frvir.2021.621965/full#supplementary-material
Anglin, J. M., Sugiyama, T., and Liew, S. L. (2017). Visuomotor adaptation in head-mounted virtual reality versus conventional training. Sci. Rep. 7:45469. doi: 10.1038/srep45469
Baird, J., and Stewart, J. C. (2018). Sequence-specific implicit motor learning using whole-arm three-dimensional reach movements. Exp. Brain Res. 236, 59–67. doi: 10.1007/s00221-017-5107-0
Barker, K. L., Batting, M., Schlüssel, M., and Newman, M. (2019). The reliability and validity of the Figure of 8 Walk test in older people with knee replacement: does the setting have an impact? Physiotherapy 105, 76–83. doi: 10.1016/j.physio.2018.07.003
Barnett, C. T., Bisele, M., Jackman, J. S., Rayne, T., Moore, N. C., Spalding, J. L., et al. (2016). Manipulating walking path configuration influences gait variability and six-minute walk test outcomes in older and younger adults. Gait Posture 44, 221–226. doi: 10.1016/j.gaitpost.2015.12.022
Bonnette, S., DiCesare, C. A., Kiefer, A. W., Riley, M. A., Foss, K. D. B., Thomas, S., et al. (2020). A technical report on the development of a real-time visual biofeedback system to optimize motor learning and movement deficit correction. J. Sports Sci. Med. 19, 84–94.
Borrego, A., Latorre, J., Llorens, R., Alcañiz, M., and No,é, E. (2016). Feasibility of a walking virtual reality system for rehabilitation: objective and subjective parameters. J. Neuroeng. Rehabil. 13:68. doi: 10.1186/s12984-016-0174-1
Bouma, H. (1970). Interaction effects in parafoveal letter recognition. Nature 226, 177–178. doi: 10.1038/226177a0
Bruder, G., Steinicke, F., Bolte, B., Wieland, P., Frenz, H., and Lappe, M. (2013). Exploiting perceptual limitations and illusions to support walking through virtual environments in confined physical spaces. Displays 34, 132–141. doi: 10.1016/j.displa.2012.10.007
Bustamante, E. A., and Spain, R. D. (2008). “Measurement invariance of the Nasa TLX,” in Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Los Angeles, CA: SAGE Publications Sage CA), 1522–1526. doi: 10.1177/154193120805201946
Buszard, T., Farrow, D., Verswijveren, S. J. J. M., Reid, M., Williams, J., Polman, R., et al. (2017). Working memory capacity limits motor learning when implementing multiple instructions. Front. Psychol. 8:1350. doi: 10.3389/fpsyg.2017.01350
Chen, H.-M., Lee, H.-L., Yang, F.-C., Chiu, Y.-W., and Chao, S.-Y. (2020). Effectiveness of motivational interviewing in regard to activities of daily living and motivation for rehabilitation among stroke patients. Int. J. Environ. Res. Public Health 17:2755. doi: 10.3390/ijerph17082755
Chuang, T., Lin, N., Chen, J., Hung, C., Huang, Y., Teng, C., et al. (2018). “Deep trail-following robotic guide dog in pedestrian environments for people who are blind and visually impaired - learning from virtual and real worlds,” in 2018 IEEE International Conference on Robotics and Automation (ICRA). Brisbane, QLD, 5849–5855. doi: 10.1109/ICRA.2018.8460994
Cikajlo, I., Rudolf, M., Mainetti, R., and Borghese, N. A. (2020). Multi-exergames to set targets and supplement the intensified conventional balance training in patients with stroke: a randomized pilot trial. Front. Psychol. 11:572. doi: 10.3389/fpsyg.2020.00572
Corbetta, D., Imeri, F., and Gatti, R. (2015). Rehabilitation that incorporates virtual reality is more effective than standard rehabilitation for improving walking speed, balance and mobility after stroke: a systematic review. J. Physiother. 61, 117–124. doi: 10.1016/j.jphys.2015.05.017
Cuperus, A. A., Keizer, A., Evers, A. W., van den Houten, M. M., Teijink, J. A., and van der Ham, I. J. (2018). Manipulating spatial distance in virtual reality: effects on treadmill walking performance in patients with intermittent claudication. Comput. Human Behav. 79, 211–216. doi: 10.1016/j.chb.2017.10.037
Dahms, C., Brodoehl, S., Witte, O. W., and Klingner, C. M. (2020). The importance of different learning stages for motor sequence learning after stroke. Hum. Brain Mapp. 41, 270–286. doi: 10.1002/hbm.24793
Davis, R., Ohman, J. M., and Weisbeck, C. (2017). Salient cues and wayfinding in Alzheimer's disease within a virtual senior residence. Environ. Behav. 49, 1038–1065. doi: 10.1177/0013916516677341
Dawson, D. R., and Marcotte, T. D. (2017). Special issue on ecological validity and cognitive assessment. Neuropsychol. Rehabil. 27, 599–602. doi: 10.1080/09602011.2017.1313379
Deci, E. L., Eghrari, H., Patrick, B. C., and Leone, D. R. (1994). Facilitating internalization: the self-determination theory perspective. J. Pers. 62, 119–142. doi: 10.1111/j.1467-6494.1994.tb00797.x
Denneman, R. P. M., Kal, E. C., Houdijk, H., and Kamp, J. V. (2018). Over-focused? The relation between patients' inclination for conscious control and single- and dual-task motor performance after stroke. Gait Posture 62, 206–213. doi: 10.1016/j.gaitpost.2018.03.008
Foulsham, T., Walker, E., and Kingstone, A. (2011). The where, what and when of gaze allocation in the lab and the natural environment. Vision Res. 51, 1920–1931. doi: 10.1016/j.visres.2011.07.002
Fox, J., Arena, D., and Bailenson, J. N. (2009). Virtual reality: a survival guide for the social scientist. J. Media Psychol. 21, 95–113. doi: 10.1027/1864-1105.21.3.95
Furukawa, M., Yoshikawa, H., Hachisu, T., Fukushima, S., and Kajimoto, H. (2011). “Vection field” for pedestrian traffic control“, in Proceedings of the 2nd Augmented Human International Conference (Tokyo: Association for Computing Machinery). doi: 10.1145/1959826.1959845
Gil-Gómez, J.-A., Lloréns, R., Alcañiz, M., and Colomer, C. (2011). Effectiveness of a Wii balance board-based system (eBaViR) for balance rehabilitation: a pilot randomized clinical trial in patients with acquired brain injury. J. Neuroeng. Rehabil. 8:30. doi: 10.1186/1743-0003-8-30
Gokeler, A., Neuhaus, D., Benjaminse, A., Grooms, D. R., and Baumeister, J. (2019). Principles of motor learning to support neuroplasticity after ACL injury: implications for optimizing performance and reducing risk of second ACL injury. Sports Med. 49, 853–865. doi: 10.1007/s40279-019-01058-0
Grogorick, S., Albuquerque, G., Tauscher, J.-P., and Magnor, M. (2018). Comparison of unobtrusive visual guidance methods in an immersive dome environment. ACM Transact. Appl. Perception (TAP) 15, 1–11. doi: 10.1145/3238303
Hart, S. G. (2006). “NASA-task load index (NASA-TLX); 20 years later,” in: Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Los Angeles, CA: Sage Publications Sage CA), 904–908. doi: 10.1177/154193120605000909
Henry, C. A., and Kohn, A. (2020). Spatial contextual effects in primary visual cortex limit feature representation under crowding. Nat. Commun. 11:1687. doi: 10.1038/s41467-020-15386-7
Hersh, M. A., and Johnson, M. A. (2010). A robotic guide for blind people. Part 1. A multi-national survey of the attitudes, requirements and preferences of potential end-users. Appl. Bionics Biomech. 7, 277–288. doi: 10.1155/2010/252609
Hess, R. J., Brach, J. S., Piva, S. R., and VanSwearingen, J. M. (2010). Walking skill can be assessed in older adults: validity of the Figure-of-8 Walk Test. Phys. Ther. 90, 89–99. doi: 10.2522/ptj.20080121
Ijaz, K., Ahmadpour, N., Wang, Y., and Calvo, R. A. (2020). Player Experience of Needs Satisfaction (PENS) in an immersive virtual reality exercise platform describes motivation and enjoyment. Int. J. Human–Comput. Interact. 36, 1195–1204. doi: 10.1080/10447318.2020.1726107
Jie, L.-J., Kleynen, M., Meijer, K., Beurskens, A., and Braun, S. (2018). The effects of implicit and explicit motor learning in gait rehabilitation of people after stroke: protocol for a randomized controlled trial. JMIR Res. Protoc. 7:e142. doi: 10.2196/resprot.9595
Johnson, L., Burridge, J., Demain, S., and Ewings, S. (2019). Comparing the impact of an implicit learning approach with standard care on recovery of mobility following stroke: protocol for a pilot cluster randomized controlled trial. JMIR Res. Protoc. 8:e14222. doi: 10.2196/14222
Johnson, L., Burridge, J. H., and Demain, S. H. (2013). Internal and external focus of attention during gait re-education: an observational study of physical therapist practice in stroke rehabilitation. Phys. Ther. 93, 957–966. doi: 10.2522/ptj.20120300
Keatley, D., Clarke, D. D., and Hagger, M. S. (2013). The predictive validity of implicit measures of self-determined motivation across health-related behaviours. Br. J. Health Psychol. 18, 2–17. doi: 10.1111/j.2044-8287.2011.02063.x
Kleynen, M., Jie, L.-J., Theunissen, K., Rasquin, S. M., Masters, R. S., Meijer, K., et al. (2019). The immediate influence of implicit motor learning strategies on spatiotemporal gait parameters in stroke patients: a randomized within-subjects design. Clin. Rehabil. 33, 619–630. doi: 10.1177/0269215518816359
Langbehn, E., Lubos, P., Bruder, G., and Steinicke, F. (2017). Bending the curve: sensitivity to bending of curved paths. IEEE Trans. Vis. Comput. Graph. 23, 1389–1398. doi: 10.1109/TVCG.2017.2657220
Lee, J., Bang, J., and Suh, H. (2018). “Identifying affordance features in virtual reality: how do virtual reality games reinforce user experience?,” in Augmented Cognition: Intelligent Technologies. AC 2018. Lecture Notes in Computer Science, Vol. 10915, eds D. Schmorrow, C. Fidopiastis (Cham: Springer). doi: 10.1007/978-3-319-91470-1_31
Lemos, A., Wulf, G., Lewthwaite, R., and Chiviacowsky, S. (2017). Autonomy support enhances performance expectancies, positive affect, and motor learning. Psychol. Sport Exerc. 31, 28–34. doi: 10.1016/j.psychsport.2017.03.009
Lin, Q., Rieser, J., and Bodenheimer, B. (2012). “Stepping over and ducking under: the influence of an avatar on locomotion in an HMD-based immersive virtual environment,” in Proceedings of the ACM Symposium on Applied Perception, Los Angeles, CA, 7–10. doi: 10.1145/2338676.2338678
Liu, T.-W., and Ng, S. S. M. (2019). The reliability and validity of the survey of activities and fear of falling in the elderly for assessing fear and activity avoidance among stroke survivors. PLoS ONE 14:e0214796. doi: 10.1371/journal.pone.0214796
Maeda, T., Ando, H., Amemiya, T., Nagaya, N., Sugimoto, M., and Inami, M. (2005). “Shaking the world: galvanic vestibular stimulation as a novel sensation interface,” in ACM SIGGRAPH 2005 Emerging Technologies (Los Angeles, CA: Association for Computing Machinery). doi: 10.1145/1187297.1187315
Mak, T. C., Young, W. R., Chan, D. C., and Wong, T. W. (2018). Gait stability in older adults during level-ground walking: the attentional focus approach. J. Gerontol. Series B 75, 274–281. doi: 10.1093/geronb/gby115
Melnik, N., Coates, D. R., and Sayim, B. (2020). Emergent features break the rules of crowding. Sci. Rep. 10:406. doi: 10.1038/s41598-019-57277-y
Miller, H. J. (1992). Human wayfinding, environment-behavior relationships, and artificial intelligence. J. Planning Literature 7, 139–150. doi: 10.1177/088541229200700202
Morris, J. H., Oliver, T., Kroll, T., Joice, S., and Williams, B. (2017). Physical activity participation in community dwelling stroke survivors: synergy and dissonance between motivation and capability. a qualitative study. Physiotherapy 103, 311–321. doi: 10.1016/j.physio.2016.05.001
Nielsen, L. T., Møller, M. B., Hartmeyer, S. D., Ljung, T. C., Nilsson, N. C., Nordahl, R., et al. (2016). “Missing the point: an exploration of how to guide users' attention during cinematic virtual reality,” in Proceedings of the 22nd ACM Conference on Virtual Reality Software and Technology, Munich, 229–232. doi: 10.1145/2993369.2993405
Nilsson, N. C., Serafin, S., Steinicke, F., and Nordahl, R. (2018). Natural walking in virtual reality: a review. Comput. Entertain. 16, 1–22. doi: 10.1145/3180658
Norman, D. A. (1999). Affordance, conventions, and design. Interactions 6, 38–43. doi: 10.1145/301153.301168
Ntoumanis, N., Ng, J. Y. Y., Prestwich, A., Quested, E., Hancox, J. E., Thøgersen-Ntoumani, C., et al. (2020). A meta-analysis of self-determination theory-informed intervention studies in the health domain: effects on motivation, health behavior, physical, and psychological health. Health Psychol. Rev. 1–31. doi: 10.1080/17437199.2020.1718529
Odonkor, C. A., Thomas, J. C., Holt, N., Latham, N., VanSwearingen, J., Brach, J. S., et al. (2013). A comparison of straight-and curved-path walking tests among mobility-limited older adults. J. Gerontol. Series A 68, 1532–1539. doi: 10.1093/gerona/glt060
Palstam, A., Sjödin, A., and Sunnerhagen, K. S. (2019). Participation and autonomy five years after stroke: a longitudinal observational study. PLoS ONE 14:e0219513. doi: 10.1371/journal.pone.0219513
Parsons, T. D., Carlew, A. R., Magtoto, J., and Stonecipher, K. (2017). The potential of function-led virtual environments for ecologically valid measures of executive function in experimental and clinical neuropsychology. Neuropsychol. Rehabil. 27, 777–807. doi: 10.1080/09602011.2015.1109524
Peck, T. C., Fuchs, H., and Whitton, M. C. (2009). Evaluation of reorientation techniques and distractors for walking in large virtual environments. IEEE Trans. Vis. Comput. Graph 15, 383–394. doi: 10.1109/TVCG.2008.191
Rewkowski, N., Rungta, A., Whitton, M., and Lin, M. (2019). “Evaluating the effectiveness of redirected walking with auditory distractors for navigation in virtual environments,” in: 2019 IEEE Conference on Virtual Reality and 3D User Interfaces (VR) (Osaka: IEEE), 395–404. doi: 10.1109/VR.2019.8798286
Rothe, S., and Hußmann, H. (2018). Guiding the Viewer in Cinematic Virtual Reality by Diegetic Cues. In: Augmented Reality, Virtual Reality, and Computer Graphics. AVR 2018. Lecture Notes in Computer Science, Vol. 10850, L. De Paolis and P. Bourdot eds (Cham: Springer). doi: 10.1007/978-3-319-95270-3_7
Ryan, R., and Deci, E. (2017). Self-Determination Theory: Basic Psychological Needs in Motivation, Development, and Wellness, Paperback edition - 2018. New York, NY: Guildford Press. doi: 10.1521/978.14625/28806
Ryan, R. M. (1982). Control and information in the intrapersonal sphere: An extension of cognitive evaluation theory. J. Pers. Soc. Psychol. 43:450. doi: 10.1037/0022-3514.43.3.450
Ryan, R. M., and Deci, E. L. (2020). Intrinsic and extrinsic motivation from a self-determination theory perspective: definitions, theory, practices, and future directions. Contemp. Educ. Psychol. 61:101860. doi: 10.1016/j.cedpsych.2020.101860
Schack, J., Mirtaheri, P., Steen, H., and Gjøvaag, T. (2019). Assessing mobility for persons with lower limb amputation: the Figure-of-Eight Walk Test with the inclusion of two novel conditions. Disabil. Rehabil. 1–10. doi: 10.1080/09638288.2019.1662495
Schmitz, A., MacQuarrie, A., Julier, S., Binetti, N., and Steed, A. (2020). “Directing versus attracting attention: exploring the effectiveness of central and peripheral cues in panoramic videos,” 2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR). Atlanta, GA. doi: 10.1109/VR46266.2020.00024
Self-Determination, T. (2020). Intrinsic Motivation Inventory (IMI) [Online]. selfdeterminationtheory.org. Available online at: https://selfdeterminationtheory.org/intrinsic-motivation-inventory/ (accessed October 9, 2018).
Sra, M. (2017). “Steering locomotion by vestibular perturbation in room-scale VR,” in 2017 IEEE Virtual Reality (VR) (Los Angeles, CA: IEEE), 405–406. doi: 10.1109/VR.2017.7892348
Sra, M., Xu, X., Mottelson, A., and Maes, P. (2018). “VMotion: designing a seamless walking experience in VR,” in Proceedings of the 2018 Designing Interactive Systems Conference, Hong Kong, 59–70. doi: 10.1145/3196709.3196792
Sweet, S. N., Fortier, M. S., Strachan, S. M., and Blanchard, C. M. (2012). Testing and integrating self-determination theory and self-efficacy theory in a physical activity context. Canad. Psychol. Canad. 53:319. doi: 10.1037/a0030280
Textures.com (2017a). “3D Scanned Tree Bark - 1 Meter”. (Textures.com: Textures.com). Available online at: https://www.textures.com/download/3DScans0059/127594
Textures.com (2017b). “Branches0012_1_alphamasked_S”. (Textures.com: Textures.com). Available online at: https://www.textures.com/download/Branches0012/85983
Textures.com (2017c). “Branches0013_1_alphamasked_S”. (Textures.com: Textures.com). Available online at: https://www.textures.com/download/Branches0013/85986
Textures.com (2017d). “Leaves0142_4_alphamasked_S”. (Textures.com: Textures.com). Available online at: https://www.textures.com/download/Leaves0142/84590
Thorpert, P., Englund, J.-E., and Nielsen, A. B. (2019). The impact of the primary colours yellow, red and, blue on the perception of greenery. Landscape Res. 44, 88–98. doi: 10.1080/01426397.2017.1413177
Tong, M. H., Zohar, O., and Hayhoe, M. M. (2017). Control of gaze while walking: task structure, reward, and uncertainty. J. Vis. 17:28. doi: 10.1167/17.1.28
Vansteenkiste, P., Zeuwts, L., Cardon, G., Philippaerts, R., and Lenoir, M. (2014). The implications of low quality bicycle paths on gaze behavior of cyclists: a field test. Transport. Res. F 23, 81–87. doi: 10.1016/j.trf.2013.12.019
Vasylevska, K., Kaufmann, H., Bolas, M., and Suma, E. A. (2013). “Flexible spaces: Dynamic layout generation for infinite walking in virtual environments,” in 3D User Interfaces (3DUI), 2013 IEEE Symposium on (Orlando, FL), 39–42. doi: 10.1109/3DUI.2013.6550194
Vilar, E., Rebelo, F., and Noriega, P. (2014). Indoor human wayfinding performance using vertical and horizontal signage in virtual reality. Human Fact. Ergonomics Manufact. Serv. Indust. 24, 601–615. doi: 10.1002/hfm.20503
Welch, S. A., Ward, R. E., Kurlinski, L. A., Kiely, D. K., Goldstein, R., VanSwearingen, J., et al. (2016). Straight and curved path walking among older adults in primary care: associations with fall-related outcomes. PM&R 8, 754–760. doi: 10.1016/j.pmrj.2015.12.004
Whitney, D., and Levi, D. M. (2011). Visual crowding: a fundamental limit on conscious perception and object recognition. Trends Cogn. Sci. 15, 160–168. doi: 10.1016/j.tics.2011.02.005
Wong, S. S. T., Yam, M.-S., and Ng, S. S. M. (2013). The Figure-of-Eight Walk test: reliability and associations with stroke-specific impairments. Disabil. Rehabil. 35, 1896–1902. doi: 10.3109/09638288.2013.766274
Wulf, G., Chiviacowsky, S., and Drews, R. (2015). External focus and autonomy support: two important factors in motor learning have additive benefits. Hum. Mov. Sci. 40, 176–184. doi: 10.1016/j.humov.2014.11.015
Keywords: guidance, navigation, virtual reality, virtual environments, virtual rehabilitation, autonomy, self-determination theory, attractors
Citation: Croucher C, Powell W, Dicks M, Stevens B and Powell V (2021) The Use of Embedded Context-Sensitive Attractors for Clinical Walking Test Guidance in Virtual Reality. Front. Virtual Real. 2:621965. doi: 10.3389/frvir.2021.621965
Received: 27 October 2020; Accepted: 31 March 2021;
Published: 29 April 2021.
Edited by:
Albert Rizzo, University of Southern California, United StatesReviewed by:
Tomohiro Amemiya, The University of Tokyo, JapanCopyright © 2021 Croucher, Powell, Dicks, Stevens and Powell. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Charlotte Croucher, Yy5zLmNyb3VjaGVyQHRpbGJ1cmd1bml2ZXJzaXR5LmVkdQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.