
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Remote Sens., 21 April 2023
Sec. Data Fusion and Assimilation
Volume 4 - 2023 | https://doi.org/10.3389/frsen.2023.1156519
 Kathrin Lisa Kapper1*†
Kathrin Lisa Kapper1*† Thomas Goelles 1,2†Stefan Muckenhuber 1,2†Andreas Trügler 1,3,4
Thomas Goelles 1,2†Stefan Muckenhuber 1,2†Andreas Trügler 1,3,4 Jakob Abermann 1
Jakob Abermann 1 Birgit Schlager 1,2Christoph Gaisberger 1Markus Eckerstorfer 5
Birgit Schlager 1,2Christoph Gaisberger 1Markus Eckerstorfer 5 Jakob Grahn 6
Jakob Grahn 6 Eirik Malnes 6Alexander Prokop 7,8
Eirik Malnes 6Alexander Prokop 7,8 Wolfgang Schöner 1
Wolfgang Schöner 1Avalanches pose a significant threat to the population and infrastructure of mountainous regions. The mapping and documentation of avalanches in Austria is mostly done by experts during field observations and covers usually only specific localized areas. A comprehensive mapping of avalanches is, however, crucial for the work of local avalanche commissions as well as avalanche warning services to assess, e.g., the avalanche danger. Over the past decade, mapping avalanches from satellite imagery has proven to be a promising and rapid approach to monitor avalanche activity in specific regions. Several recent avalanche detection approaches use deep learning-based algorithms to improve detection rates compared to traditional segmentation algorithms. Building on the success of these deep learning-based approaches, we present the first steps to build a modular data pipeline to map historical avalanche cycles in Copernicus Sentinel-1 imagery of the Austrian Alps. The Sentinel-1 mission has provided free all-weather synthetic aperture radar data since 2014, which has proven suitable for avalanche mapping in a Norwegian test area. In addition, we present a roadmap for setting up a segmentation algorithm, in which a general U-Net approach will serve as a baseline and will be compared with the mapping results of additional algorithms initially applied to autonomous driving. We propose to train the U-Net using labeled training dataset of avalanche outlines from Switzerland, Norway and Greenland. Due to the lack of training and validation data from Austria, we plan to compile the first avalanche archive for Austria. Meteorological variables, e.g., precipitation or wind, are highly important for the release of avalanches. In a completely new approach, we will therefore consider weather station data or outputs of numerical weather models in the learning-based algorithm to improve the detection performance. The mapping results in Austria will be complemented with pointwise field measurements of the MOLISENS platform and the RIEGL VZ-6000 terrestrial laser scanner.
Each year around 100 fatalities are related to snow avalanches in the European Alps (Techel et al., 2016). More specifically, 16 people lose their lives on average each year over the past 5 years in snow avalanches in the Austrian Alps (EAWS, European Avalanche Warning Services, 2023). In addition, avalanches cause tremendous financial and economic damage to infrastructure, buildings, and transportation networks such as roads and railways (Voumard et al., 2018). Comprehensive, exact mapping of avalanches builds an important pillar for avalanche warning and mitigation approaches (Bühler et al., 2019). Field-based observations are laborious, prone to high risk and limited visibility during snow fall or fog and interpretational biases, and are usually not available for less accessible areas (Eckerstorfer et al., 2017a; Mayer et al., 2020). Avalanche detection based on Earth observation (EO) satellites can contribute to a far more rapid mapping than with ground observations or manual mapping. Spaceborne synthetic aperture radar (SAR) in particular was found to have high potential for avalanche detection due to frequent high-resolution images with large swath widths and independence of light and weather conditions (e.g., Wiesmann et al., 2001; Bühler et al., 2014a; Eckerstorfer et al., 2017a; Hafner et al., 2021). The avalanche detection system from the Norwegian Research centre NORCE, introduced by Eckerstorfer et al. (2019), is currently in pre-operational use by the Norwegian avalanche warning service (NVE Satskred Norway, 2022). In the same way, an automated avalanche detection, monitoring and forecasting tool for Austria based on satellite images could greatly improve, e.g., the assessment of avalanche risk, avalanche danger levels, and hazard zoning. Recently, Avian et al. (2020) demonstrated the usefulness of EO techniques including terrestrial laser scanning and SAR images for the case of the Pasterze Glacier, located in the Eastern Austrian Alps. The Austrian Alpine region is covered since 2014 by the Copernicus SAR mission Sentinel-1 with a spatial resolution of 5 × 20 m (range x azimuth; in Interferometric Wide-Swath Mode) and 6—12 days between acquisitions. This dataset provides an excellent opportunity to substantially improve our understanding of the avalanche activity and opens the possibility to develop an operational tool for avalanche detection and forecasting in Austria.
Analyzing the large amount of available Sentinel-1 images and operating a near real-time tool, requires an automated detection pipeline and a well-tested algorithm. Machine learning (ML) and deep learning (DL) methods applied to remotely sensed data have become increasingly popular, visible in a strong increase in the number of articles since 2014 (e.g., Zhu et al., 2017). The use of ML and DL has replaced other approaches in a variety of fields related to cryoshperic and natural hazard science, e.g., for the study of snow and glacial features (e.g., Haq et al., 2021b; a), snow cover mapping (e.g., Nijhawan et al., 2019), or to detect wet and dry snow (e.g., Tsai et al., 2019). Other approaches used ML to produce avalanche hazard maps that can be used for the prediction of future avalanche events (e.g., Rahmati et al., 2019) or to model snow wetness and snow density using artificial neural networks (e.g., Haq et al., 2019). Several scientific studies have demonstrated the potential of (semi-)automated avalanche detection from SAR (e.g., Vickers et al., 2016; 2017; Wesselink et al., 2017; Abermann et al., 2019; Eckerstorfer et al., 2019; Leinss et al., 2020). A major challenge is the validation of the automatically detected avalanches since ground truth data is sparse. This caveat is among the main reasons why detection from SAR images is not yet used to a larger extent.
The main objective of this study is to pave the way to an automated monitoring system of avalanches for Austria making use of Copernicus Sentinel-1 SAR imagery. First, this article reviews the state of the art of manual and (semi-)automated avalanche detection by taking into account SAR and optical satellite imagery. A specific focus is set on the currently used ML methods. The subsequent chapter presents datasets that are used for validation and training of the ML algorithms, followed by a critical discussion about obstacles and challenges of avalanche detection from satellite images. In chapter 5, the setup and roadmap of an automated state-of-the-art avalanche detection system for Austria is presented including novel concepts for the detection algorithm, weather integration, and ground-truth data acquisition. The last chapters include the discussion and an outlook, as well as conclusions.
The first approach to detect avalanches from SAR images was undertaken by Wiesmann et al. (2001). The authors used SAR data from the ESA European Remote Sensing satellites, ERS-1/-2 Tandem, around a large avalanche event in February 1999 in Switzerland. They composed RGB composite images by mapping images from different dates to the three color channels red, green, and blue. In this way, several avalanche cones with compacted rough debris were identified due to higher backscatter than the surrounding homogenous snow cover.
Malnes et al. (2013) used C-band Radarsat-2 images with a resolution of 3 m to investigate if three avalanches in the county of Troms in northern Norway were visible in the backscatter images. To validate the results, high resolution ortho-photos from an unmanned airborne vehicle (UAV) mounted camera and photographs taken during helicopter reconnaissance flights right after the events were used. As a results, two out of three avalanches could clearly be identified due to a high contrast between the relatively high backscatter of the avalanche debris in the runout zone and the low backscatter of the surrounding snow. Eckerstorfer and Malnes (2015) further improved the detection of avalanches from Radarsat-2 images. To exclude areas of radar shadow and layover as possible sources of false interpretation, Eckerstorfer and Malnes (2015) generated masks and applied them to single backscatter images. In addition, they applied a mask indicating avalanche starting and runout zones, with steepness
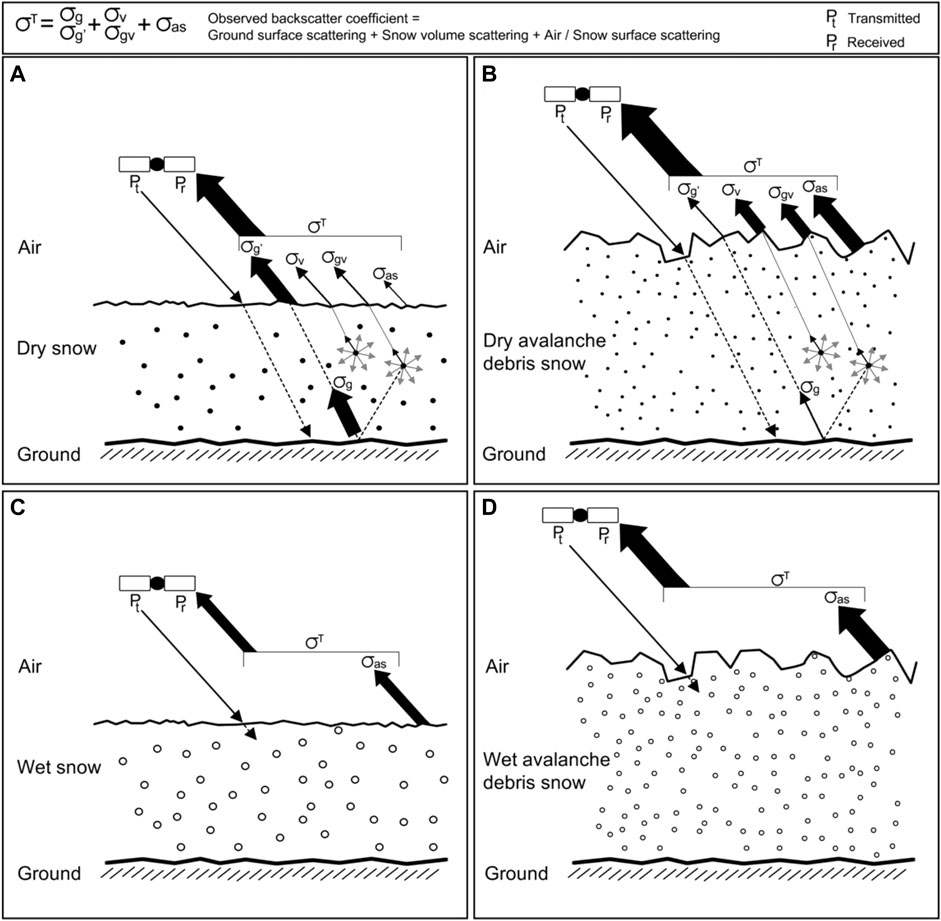
FIGURE 1. (A) Dry snow: The total backscatter (σT) is controlled by the backscatter from the ground (σg). (B) Dry avalanche debris: increased σT is produced by increased volume backscatter σv and σgv and increased backscatter at the air-snow surface interface σas, which are related to greater snow depths and a higher surface roughness, respectively. (C) Wet snow: the electromagnetic wave is assumed to barely penetrate into the snow volume. Therefore, σT is predominantly composed of σas. It is, however, lower than in dry snow. (D) Wet avalanche debris: The surface roughness of the avalanche debris increases the strength of σT compared to undisturbed wet snow. Reproduced with permission from Eckerstorfer and Malnes (2015).
Bühler et al. (2014b) used terrestrial laser scanning and TerraSAR-X stripmap mode satellite images in their feasibility study for an improved Alpine avalanche forecast service. They suggested a combined application of SAR imagery and terrestrial radar interferometry as a promising solution to monitor the avalanche activity of a certain region.
Eckerstorfer et al. (2017b) manually identified avalanches in avalanche runout zones that were defined as areas 300 m downslope from the avalanche starting zones. The authors used Sentinel-1A imagery covering a 2 year avalanche cycle in Norway for the detection, and validated the results with avalanches identified in high resolution Radarsat-2 images.
Lato et al. (2012) first manually detected avalanches in order to validate their segmentation and classification methodologies to identify recent snow avalanche deposits within very high resolution (VHR) panchromatic optical remote sensing imagery. One of the drawbacks of avalanche detection in optical images is that experts are not able to manually digitize avalanches located in regions in the shade (Lato et al., 2012).
The largest and freely available dataset of avalanche outlines to date was mapped by Bühler et al. (2019) and Hafner et al. (2021). The dataset from January 2018 covers an area of around 12,500 km2 in the Swiss and Liechtenstein Alps. A total of 18,737 individual avalanche outlines were manually mapped, of which 33% could be identified with their exact outline. The authors tested satellite imagery from several high-resolution optical (WorldView-4, Pleiades, Spot6/7) and a SAR (TerraSAR-X) sensor. The SPOT6/7 ultimately proved to be their choice of data due to their very large coverage compared to the other optical sensor data. The rather complex preprocessing of the TerraSAR-X data did not allow for a rapid avalanche mapping. The validation of the manually mapped avalanches with photographs from helicopter overflights of parts of the covered area revealed an accuracy of 73%.
Manual detection of avalanches in satellite images is still considered as the method to obtain the most complete collection of avalanche records compared to automated detection (e.g., Lato et al., 2012; Bianchi et al., 2021). Compared to automated detection, manual detection however is very time consuming and may often be subjective. Hafner et al. (2022) conducted a study on the inter-observer variability by comparing expert agreement on manual avalanche mapping in SPOT6/7 optical data. They found that the expert agreement is considerably lower than expected.
One of the first successful attempts to apply algorithms for the detection and the mapping of avalanches in optical satellite data was achieved by Larsen et al. (2010). They tested two different texture segmentation algorithms for the classification of avalanches in the images: 1) a texture based segmentation using gray-level co-occurrence matrices and 2) a segmentation based on directional filters (Larsen et al., 2010, and references therein). The segmentation procedures were followed by extraction of shapes and context features from the detected objects and an object based classification thereof. As input several Quickbird images from the Hellesylt area in central Norway were acquired with a resolution of 0.6 m in the panchromatic band and 2.4 m in the multispectral bands. Results of the segmentation show that using gray-level co-occurrence matrices extracts avalanches slightly more effectively than the directional filter approach.
In their work, Nolting et al. (2018) utilized a combination of regional scale statistical mapping of avalanche prone areas together with the detection of avalanches in optical satellite data from South Tirol, Italy. First, they statistically mapped zones that were prone to avalanche release by using the Generalized Additive Model (GAM), which lead to an avalanche release likelihood model. This static model was then used as input for a random walk process path model to determine potential avalanche paths and deposits. Second, optical remote sensing imagery of Sentinel-2 was used to detect avalanches with a change detection approach in which images before and after the known avalanche event were processed. In a third step, the first and second approach were combined. As a result, the combination of the two approaches improved the avalanche detection based on change detection by reducing false alarms. A major challenge was the detection in zones within shadowed areas of the optical images.
In the recent study of Hafner et al. (2022) an adapted DeepLabV3+, a state-of-the-art DL model, was applied to automatically detect and map avalanches in SPOT 6/7 satellite images from January 2018 and January 2019, which makes it the first attempt to apply a DL model to optical satellite data. For training, validation and testing of the model, a dataset comprising 24,778 manually annotated avalanche polygons was used. Their DL model is able to adapt to the underlying terrain model through deformable convolutions that adapt their receptive field size according to the input data. They were able to map 66% of the total number of avalanches from the training dataset. When areas in the shade were excluded from training, they could show that in illuminated terrain both training and test results improve.
One of the first attempts to automatically detect avalanches in change detection SAR images was undertaken by Hamar et al. (2017). In their approach they first mapped potential avalanches and then used supervised classification with a random forest classifier in Radarsat-2 images.
Vickers et al. (2016, 2017) developed an automated avalanche debris detection algorithm for Sentinel-1 imagery that utilizes change detection, k-means classification, and unsupervised object classification methods. The automated avalanche detection algorithm was tested in a region in northern Norway and was compared with manually identified avalanche debris and field-based images to quantify the algorithm accuracy. A correct detection rate of over 60% (i.e., accuracy of the detection processor) could be achieved.
Eckerstorfer et al. (2019) further developed the change detection algorithm from Vickers et al. (2016, 2017) to a near-real time avalanche monitoring system for Sentinel-1 SAR data. This system detects avalanche polygons fully automatically within roughly 10 min after Sentinel-1 data are downloaded. The avalanche detection algorithm achieved a probability of detection of 67% on average with a false alarm rate of 46%. Eckerstorfer et al. (2019) processed 5 years of Sentinel-1 images acquired over a 150 × 100 km large area in Northern Norway. In total, 77% of all avalanches were detected manually in the SAR images when compared to a dataset of avalanches observed in the field. The automated avalanche detection algorithm resulted in an accuracy of 79% compared to these manual detections.
According to Kummervold et al. (2018), avalanche detection algorithms based on automatic signal processing of SAR images have the potential to achieve accuracies of roughly 80%. However, in complex cases, e.g., snow turning from wet to dry, manual interpretations are still surpassing automatic signal processing methods. With the attempt to outperform these methods, Kummervold et al. (2018) therefore applied two convolutional neural networks, VGG-19 and AConvNets, for detecting avalanches in SAR images. Convolutional networks (CNNs) are known for their particular strength in image processing tasks, since they allow a very general learning approach where each layer recognizes refined structures of an image (LeCun et al., 2015). Kummervold et al. (2018) showed that these CNNs were able to produce consistently accuracies around 90%. Conventional signal processing algorithms seem to fail for images that are easily categorized by experts, the CNNs show problems with images that are also considered ambiguous for experts. In order to further improve the detection accuracy, Kummervold et al. (2018) suggest to include information on backscatter and slope angles from neighboring image slices.
In their study, Waldeland et al. (2018) also used CNNs based on change detection in SAR images from multiple passes over the same area. The proposed methodology applies an existing pre-trained network that has been trained for classification of 1,000 different objects (not avalanches) in RGB images. Since SAR images are non-standard images, Waldeland et al. (2018) proposed a method for adjusting SAR images in such a way that they can be used in pre-trained networks for RGB images. The pre-trained network is then fine-tuned to the task of distinguishing avalanches from lookalikes in the candidate regions from the SAR images. Using cross-validation, Waldeland et al. (2018) achieved an average classification error rate of 3.5%.
Bianchi et al. (2021) developed a DL architecture of a fully convolutional U-Net for detecting avalanches in Sentinel-1 radar images. In contrast to the previous use of CNNs, the U-Net performs a segmentation. That is, each pixel is classified as avalanche or not. The U-Net design, first introduced by Ronneberger et al. (2015) in biomedical image segmentation, comprises an encoder and a decoder structure. According to the concept of CNNs, the encoder extracts feature maps in a hierarchical manner that show certain patterns of interest in the image. The deeper layers catch patterns that are more complex and have a larger spatial range. The feature maps are then gradually converted by the decoder into binary segmentation masks (avalanche or no avalanche). In order to improve generalization, certain information can also bypass directly between the encoding and decoding layers, preserving the spatial information by pixel-by-pixel semantic alignment with intermediate representations. Bianchi et al. (2021) trained a neural network on 6,345 manually labeled avalanches from 117 Sentinel-1 images. When tested on a new synthetic aperture radar image, they achieved an F1 score above 66%, compared to manual labeling.
Pre-detected avalanche outlines are usually obtained through manually annotating satellite images by an expert. For the ML detection algorithms outline datasets are usually split up in training, validation, and test datasets. Datasets from Switzerland (Hafner and Bühler, 2019; 2021), Greenland (Abermann et al., 2019), and Norway (Bianchi et al., 2021) are freely available and discussed in more detail here.
The largest currently available dataset contains 18,737 avalanche outlines from a period of a large avalanche cycle in January 2018 that covers the majority of the Swiss Alps (12,500 km2; Bühler et al., 2019; Hafner and Bühler, 2019). A second dataset from Switzerland covers an area of approximately 180 km2 around Davos and comprises an avalanche cycle a year later, in January 2019, with around 6,000 avalanches (Bühler et al., 2019; Hafner and Bühler, 2021; Hafner et al., 2021). Bühler et al. (2019) and Hafner and Bühler (2019) initially tested different satellite sensors that were suitable for rapid mapping during a first avalanche period. Optical satellite data from SPOT6/7 proved to be most useful for this task. The avalanche outlines were manually mapped after applying image enhancement techniques to analyze regions in cast shadow as well as brightly illuminated areas. For the second dataset, Hafner et al. (2021) used in addition mapped avalanches from an existing database, the Davos Avalanche Mapping Project (DAvalMap) for comparison and validation. Furthermore, ground truth data was compiled from ground-based and helicopter photographs.
For the example of Greenland, a wet-snow and slushflow avalanche event during April 2016 was studied in detail by Abermann et al. (2019). This event is special in a sense that it was in a largely unpopulated region and did not do any infrastructural harm despite its dimension (around 800 individual avalanches). It would most likely have remained unobserved and undescribed had it not also occurred in a location where interdisciplinary long-term ecosystem monitoring is performed. This coincidence gave the chance to perform ground-truthing on-site but also automated time-lapse imagery and to test semi-automated methods of avalanche detection based on SAR data in Greenland. Furthermore, the good coverage of meteorological data allowed for assessing the likely triggering factors, which are in that specific case likely a very rapidly occurring temperature rise together with a thin snow cover that allowed for quick ripening and wetting of the entire snow pack.
Numerous studies have been conducted in Norway utilizing different datasets. The largest published dataset of annotated SAR observations of avalanches in Norway, is described in Bianchi et al. (2021). It comprises 118 Sentinel-1 scenes acquired over Northern Norway during the period from October 2014 to April 2017. The dataset is annotated by an avalanche specialist, with a total of 6,345 avalanche outlines. The dataset is particularly favorable due to its wide coverage of area and multiple seasons, including a broad range of meteorological and snow conditions. However, it should be noted that the annotation is based on SAR data alone, which may exhibit inherent observational biases, such as reduced sensitivity to dry and low-density avalanche debris (Eckerstorfer et al., 2022).
Both optical and SAR satellite data have intrinsic benefits and drawbacks. One of the major advantages of SAR satellites is the ability to acquire useful data regardless of cloud cover and daylight, whereas optical satellites require clear sky and Sun light. However, SAR data need a more complex preprocessing than optical data. Sentinel-1’s temporal resolution regarding its revisit time ranges from daily in northern Norway to approximately every 6 days in central Europe (e.g., in Austria) until 23 December 2021, when both Sentinel-1 satellites were still acquiring data. Thereafter the temporal resolution is about half, as Sentinel-1B’s mission has ended. In this context it has to be noted that the SAR image used for the detection should be from a date as early as possible after the avalanche release. Melting snow, wind redistribution of snow and fresh avalanches on top of the initial avalanche may impede a correct avalanche detection (e.g., Eckerstorfer and Malnes, 2015). On the contrary, temporal resolution of optical satellite data that is currently recognized as adequate for avalanche mapping, such as from SPOT6/7, require special tasking and are hence only accessible at specified times of the year (Hafner et al., 2022).
Another important factor that influences the detection of avalanches is the spatial resolution of the sensor. Eckerstorfer and Malnes (2015) noticed differences in mapped outlines in Radarsat-2 and optical Landsat-8 images with 3 m and 15 m resolution, respectively. A comparison of manual identification of avalanches in Sentinel-1A and in very high-resolution Radarsat-2 images shows a general underestimation of avalanche activity in the Sentinel-1A data (e.g., Eckerstorfer et al., 2017b). Also Hafner et al. (2022) noted that most avalanches smaller than size 3 were overlooked in Sentinel-1 images due to the limited spatial resolution.
A major difference between SAR and optical images is that the track and release area of avalanche deposits detected using SAR images remain unknown. In optical images, e.g., in SPOT6/7, avalanches can be identified from release to deposit zone (e.g., Hafner et al., 2022). Both SAR and optical images have certain areas in which avalanche detection is more difficult. A comparison of avalanches detected in radar and SPOT-6 optical imagery showed that most of the undetected avalanches in the optical imagery lied in cast shadows (Bühler et al., 2019; Leinss et al., 2020; Hafner et al., 2022, e.g.). Similarly, radar shadow and overlays effects inhibit the detection of avalanches in SAR images, although areas affected by layover effects can potentially be used for avalanche detection (Eckerstorfer et al., 2017b).
One of the major challenges for the avalanche detection in SAR images is that it is much less reliable in detecting dry avalanches than wet avalanches (e.g., Hafner et al., 2021; Eckerstorfer et al., 2022). The low visibility is related to the low relative backscatter intensity of dry (slab) avalanche debris compared to its surroundings, as well as small differences in change detection images (Figure 1).
Despite these shortcomings, the performance of avalanche detection has improved substantially over the last years due to improved algorithms, e.g., CNNs, large training datasets, e.g., from Hafner et al. (2021), or through enhanced image processing, e.g., local resolution weighting (LRW; e.g., Tompkin and Leinss, 2021). Steep mountainous terrain together with the slant view geometry of the SAR sensor makes detection more difficult (Tompkin and Leinss, 2021). On the one hand, avalanche brightness depends on the incidence angle and on the other hand, radar shadow and layover limit the observable areas. Similarly, the spatial resolution is highly dependent on the incidence angle with respect to the terrain. Therefore, Tompkin and Leinss (2021) applied LRW to the backscatter images from ascending and descending orbits of Sentinel 1 to increase the brightness of the avalanche and improve the image coverage and resolution. Due to these new approaches and the access to freely available satellite data, the automated detection of avalanches is considered as most promising for operational use.
We obtained Copernicus Sentinel-1 SAR data that cover the time range and geographic regions of the training data and our test area (Table 1). The conventional approach for avalanche monitoring from SAR, is based on change detection between image pairs acquired at the same relative orbit (Vickers et al., 2017; Eckerstorfer et al., 2019). Typically, this is done in a geographic coordinate system of choice, thus the SAR data is geocoded prior to change detection. Specifically, the images are subject to the following pre-processing steps: 1) merging of adjacent products to a common radar geometry, 2) radiometric calibration, 3) speckle filtering, 4) radiometric transformation from linear to decibel scale, and 5) geocoding to a geographic grid, using a digital elevation model (DEM). All images have vertical-vertical (VV) and vertical-horizontal (VH) polarization bands.

TABLE 1. SAR images that cover the time range and area of the training data as well as additional images that cover Austria. “Nr.” indicates the number of images, minimum and maximum longitudes and latitudes, lonmin, latmin, lonmax, and latmax, indicate the maximum area covered by the SAR images, and “CRS” is the coordinate reference system with its corresponding UTM zone.
Geocoded images acquired at the same relative orbit are then paired and fed to a change detection algorithm. For a single Sentinel-1 satellite, the typical time separation between an image pair is 12 days, while for a two satellite constellation, it is 6 days. Due to geometric effects, specifically radar shadowing and layover, not all areas are observable or correctly represented by the satellites. A detailed satellite coverage map over Austria, showing the number of relative orbits that can observe a specific area is shown in Figure 2.
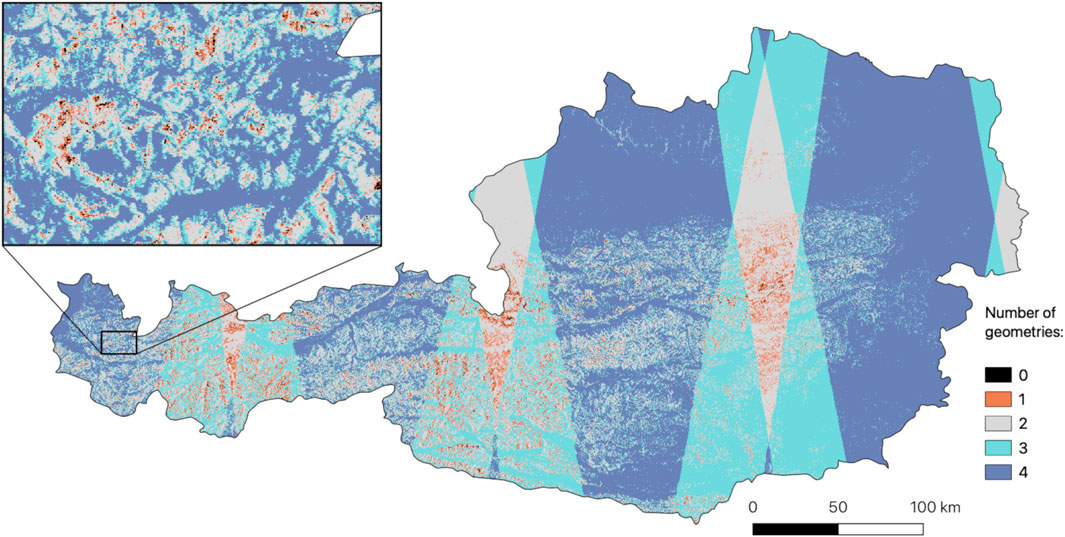
FIGURE 2. Map showing the satellite coverage of Austria by the Sentinel-1 satellites, quantified as the number of satellite geometries (relative orbits) from which an area of interest is visible. The coverage is limited by the swath width of the radar, as well as radar layover and shadowing due to the topography. Since the radar is side looking and the orbits are oriented roughly north-south, radar layover and shadowing effects are most severe in terrain with steep easterly or westerly slopes. However, only very few areas are not covered at all (indicated in black). Created with Drawio.
Besides the avalanche outline data from Switzerland (Hafner and Bühler, 2019; Hafner and Bühler, 2021), Greenland (Abermann et al., 2019) and Norway (Bianchi et al., 2021) that were discussed above, training and validation data from Austria are necessary for a reliable detection and monitoring system for Austria. Currently, no comprehensive avalanche outline dataset is available from Austria. However, some tests have been made to determine the feasibility of delineating avalanche outlines in Sentinel-2 images, but are currently still ongoing.
A collection of recent avalanche incidents that may be used to a certain extent for validation of the detection results is the Avalanche Warning Service Information System (LAWIS, 2023) database. It contains avalanche incidents that are accessible for a year, as well as weather station data and snow profiles. LAWIS is a public and transnational portal for the dissemination of avalanche information. It is currently jointly coordinated by the University of Vienna and supported by seven Austrian avalanche warning services. In addition, the avalanche warning service (LWD) Tirol provided us with a collection of avalanche incidents covering the period from 2014—2023 that contains, e.g., information on the (point) location, the date, type and size of avalanches as well as photographs of some of the avalanches. These two data collections will initially serve as validation dataset for automatic avalanche detection in Austria.
These avalanches datasets will serve as basis for an Austrian avalanche outline inventory that can serve as reference dataset for ML detection algorithms. Additional records of avalanches will be obtained with the MOLISENS lidar and radar platform, discussed in more detail below. The MOLISENS platform has proven to be promising for several applications and may be a good candidate for a local avalanche monitoring system.
Processing remote sensing data with ML algorithms is challenging and usually requires a large number of tools and parameters applied to dynamically changing data. Thus the general need for automated ML pipelines that can handle complex data arose in the field, although at least in research environments manually assembled and scripted workflows often still prevail. One of the drawbacks of such a manual approach is that it is typically not reusable, lacks parameter tracking and documentation, requires manual installation and is not ready for production and cloud deployment (Leipzig, 2017; Wratten et al., 2021). A variety of workflow managers for automated ML pipelines emerged during the recent advancement of data science and data engineering and are deployed in data-heavy branches of science like bioinformatics (e.g., Leipzig, 2017; Ahmed et al., 2021; Wratten et al., 2021). In the equally data-heavy field of satellite remote sensing cloud EO platforms like Google Earth Engine or Microsoft Planetary Computer (Gomes et al., 2020) are popular, but their main focus is data provision and not workflow management.
Currently there are over 320 data science workflow managers available and the number is still increasing (Amstutz et al., 2022). The capabilities of such managers range from graphical workflow management over web based services to highly specialized tools and low level libraries. In our work we chose Kedro (Alam et al., 2022), since it is a code-first open-source Python framework with a large community and active development. It includes data versioning, pipeline slicing, parallel execution and experiment tracking for ML model optimization. In addition, the finished project code can easily be converted to other frameworks like Apache Airflow. Hence, the complete pipeline can be deployed on cloud services and scaled for regions beyond Austria and the Alps. Since the development environment and project requirements vary widely, we apply GitHub actions to build a Docker (Merkel, 2014) image, which can be used on laptops for local development as well as on GPU servers and cloud providers. Docker uses virtualization to deliver a software application and its dependencies in so-called virtual containers that can run on any Linux, Windows, or macOS computer. Our Docker images are based on official Nvidia images and are automatically rebuild on code changes.
Figure 3 shows an overview of our data pipeline. Coloured blocks are sub-pipelines with many individual parts. These sub-pipelines can easily be reused, e.g., when the programming code should run with different data sources and processing steps. Each sub-pipeline contributes to one or more layers in the master dataset. Everything is organized by one set of parameters, which includes the data catalog. In this way, the whole process, including the programming code, data and ML parameters, is version controlled and completely reproducible, together with the development environment in the Docker image.
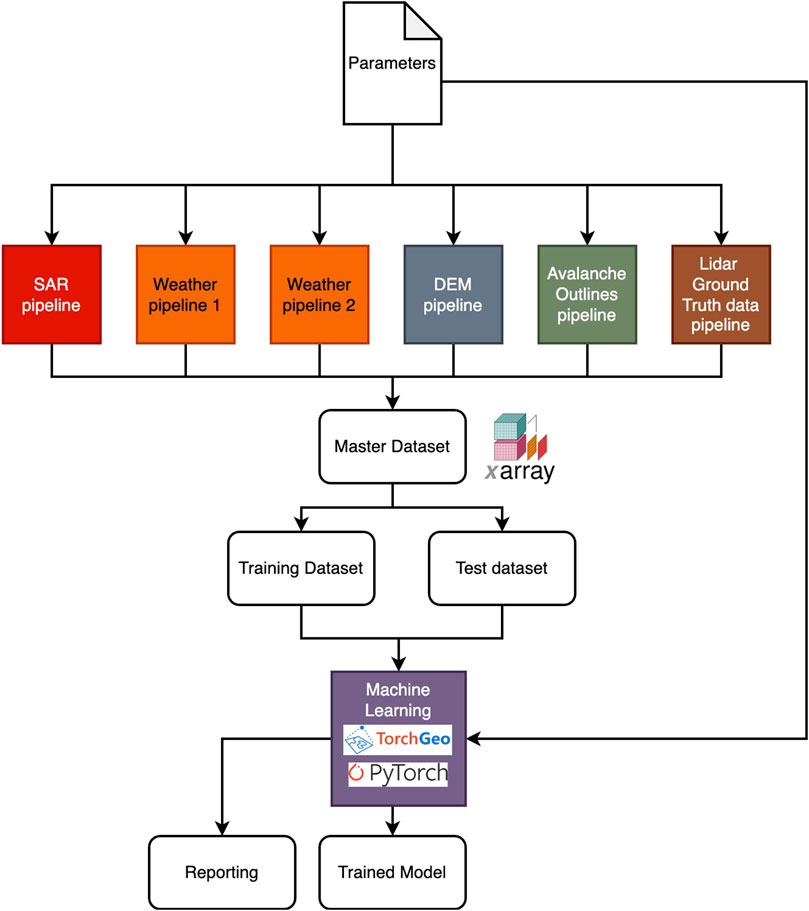
FIGURE 3. High level overview of the data pipeline, controlled by a set of parameters and orchestrated by Kedro. “DEM” stands for digital elevation model. Where the ML algorithms are implemented in PyTorch with TorchGeo (Stewart et al., 2022).
All input data are adapted to the resolution and coordinate reference system (CRS) of the SAR data in a way that the data are mapped exactly to the pixels of the SAR image.
As a test case, we applied the existing detection algorithm of Eckerstorfer et al. (2019) to Sentinel-1 SAR images of western Austria after a high activity avalanche period on 6 February 2016 as a preliminary proof of concept (Figure 4). Different colors represent changes in backscatter: green indicates increase of backscatter due to, e.g., avalanches; pink indicates a decrease of backscatter due to, e.g., wet snow; gray indicates no change of backscatter; white parts are undefined areas due to radar shadow and layover. Several green areas that are interpreted as avalanches by M. Eckerstorfer are indicated with yellow polygons.
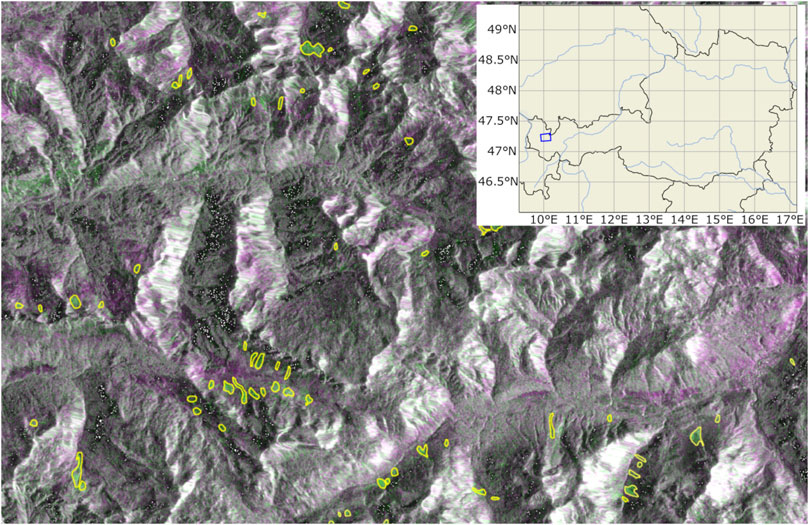
FIGURE 4. Automated avalanche detection from a SAR image of an area in western Austria (inset) with the algorithm from Eckerstorfer et al. (2019). The algorithm produces a RGB change detection image of two Sentinel-1 SAR images of January 28 and 9 February 2016, therefore depicting avalanche activity between these dates. An expert marked green areas with yellow outlines when they were interpreted as avalanche. The original images were taken in interferometric wide swath mode with a resolution of 10 × 10 m, in descending geometry and with vertical-vertical (VV) polarization. Coordinates are projected in EPSG:32633 - WGS 84/UTM zone 33N. Created with NORCE SAR preprocessing pipeline, QGIS 3.24, Python 3.8, Inkscape 1.2, and Gimp-2.10.
In a first approach to set up the avalanche detection system, we plan to implement the state-of-the-art algorithm of Bianchi et al. (2021) as a baseline and apply it to the Alps with a focus on Switzerland where validation data is available from Hafner and Bühler (2019, 2021, Figure 5). These results will serve as baseline on which to approve upon. In addition, we aim to compare the performance of the algorithm applied to parts of the Alps, Norway, and Greenland to investigate up to which degree the F1 score of 66% published by Bianchi et al. (2021) might differ in a region other than Norway. At the core of the DL image classification algorithm of Bianchi et al. (2021) is a U-Net architecture, which has provided convincing results in Norway. As input to the detection network, Bianchi et al. (2021) use a) the co- and cross-polarized components of the activity and reference SAR image pairs, VV and VH respectively, which are rescaled to [0,1], b) a combination of VV and VH (VVVH = VV2*VH2), as well as topographic information in the form of c) the slope angle and d) the potential angle of reach (PAR). The slope angle of the terrain, calculated by taking the gradient of a DEM, is an important factor for the release of avalanches and plays a significant role in determining where they may occur. The PAR shows the relationship between the distance an avalanche travels from the point where it was triggered, and the slope it slides down. We follow the approach of Bianchi et al. (2021) and make use of the existing SAR pre-processing chain provided by NORCE, which is optimized for avalanche detection in mountainous regions. For the training of the detection algorithm we will use datasets from Switzerland (Hafner and Bühler, 2019; 2021), Greenland (Abermann et al., 2019), and Norway that are either publicly available or provided by the respective owner. The avalanche outline datasets will be split into, e.g., 80% for training, 10% for validation of the detection results, and 10% for testing of the model.
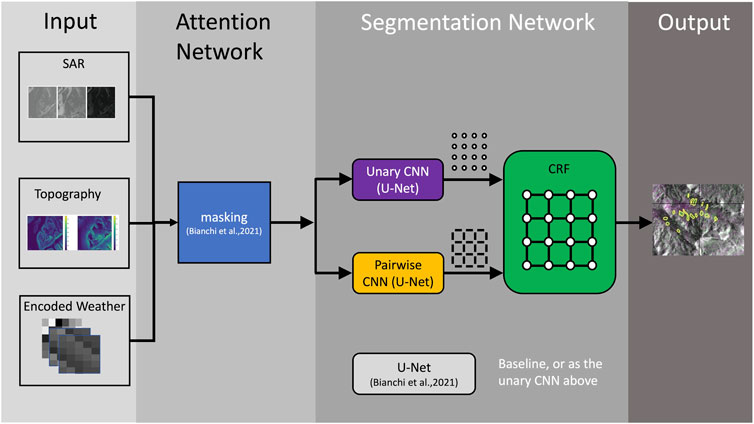
FIGURE 5. Overview of the architecture of the detection algorithm. The innovative parts are the inclusion of encoded weather data and a new segmentation network where CRF stands for conditional random field, CNN for convolutional neural network and U-net is a special CNN architecture.
In order to improve the detection performance of the baseline approach, we will include encoded weather history data as additional input to the detection algorithm, which will be explained in more detail below (Figures 5, 6). In a second approach we will investigate the possibility of using a spatio-temporal conditional random field (CRF) for the segmentation network that could ensure both, spatially and temporally consistent segmentations. This method will be compared to the baseline model as well as its variation with the included weather history and will be adapted to improve the performance. Further architectures, e.g., the U-Net++ (Zhou et al., 2018) may be taken under consideration to find the best possible detection architecture for our purpose.
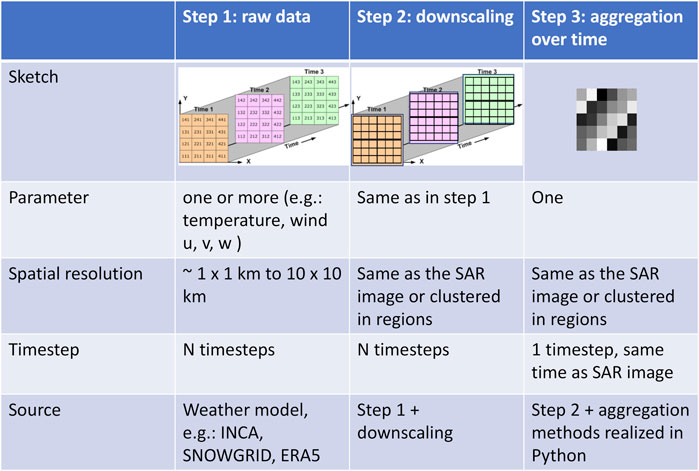
FIGURE 6. Overview of the steps to encode weather history for the use in the segmentation network.
The architecture shown in Figure 5 that we have set up makes it possible to test different segmentation networks and encoded weather data configurations, which we will be used to find the best combination. Additionally, we will investigate solutions for model interpretability and verification, based on open-source solutions like Captum (Captum, 2023). Such methods enable end users to trust and understand the DL results, which is necessary to increase the trust of the avalanche warning providers in the system.
Our detection system shall fulfill the following requirements: 1) Improve the F1 score compared to the baseline model by Bianchi et al. (2021) in the Alps; 2) automatic avalanche detection for a region of 10 × 10 km shall take less than 1 h computation time; 3) the algorithm shall work reliably on SAR images acquired 6 days apart. Furthermore, true positives (correct detection), false negatives (missed avalanches), and false positives (false avalanche detection) will be calculated for comparison with the results of Bianchi et al. (2021).
In addition, we apply the detection algorithm to SAR images of the Austrian Alps, assuming that the F1 score is not significantly different from the Swiss Alps. Using Austrian avalanche data provided by LWD Tirol, we plan to set up an avalanche outline dataset that can be used as a starting point for training and validating the detection algorithm applied to SAR data in the Austrian Alps.
Only a few studies put avalanche detection in SAR images into context with meteorological data (e.g., Coléou et al., 2018; Wendleder et al., 2021). Their findings show the potential and caveats of adding information such as precipitation, wind speed or snow depth into the detection algorithms. However, meteorological information together with SAR avalanche detection has not yet been included into a CNN algorithm yet. We therefore plan to test how the ERA5 reanalysis datasets from the ECMWF (Hersbach et al., 2020), the high-resolution INCA (Haiden et al., 2011), and SNOWGRID (Olefs et al., 2013; 2020) nowcasts from GeoSphere Austria can improve the performance of the CNN algorithm.
Figure 6 shows the steps involved to encode gridded weather data for input into the detection algorithm. In a first step the raw data is downloaded as gridded data with several time steps and multiple values per grid point. In the second step the weather data is downscaled statistically or dynamically onto the locations of the pixels of the SAR image, for example, with the Python package Scikit-downscale (Hamman and Kent, 2021). Then the weather data is aggregated over time, which produces one grid of values. This aggregation function can be averaging or it can be a snowpack model, depending on the type of weather parameters and the desired complexity. The aggregation function produces then a tensor of size n × m × 1 which feeds into the detection algorithm from Figure 5.
The technology guide for monitoring of gravitational natural hazards by GEOPREVENT AG (2022) summarizes and compares sensors and methods currently used for avalanche detection. According to the technology guide, currently used sensors and methods are ground-based avalanche radars, geophones, trigger lines, infrasonic sensors, and snow height measurements. WYSSEN Avalanche Control AG (Wyssen, 2023) and GEOPREVENT are two examples of companies that developed radars for avalanche detection of both, spontaneous and triggered avalanches. Aerial photographs taken during reconnaissance flights with helicopters and UAVs are often a useful addition to gain a better image of the avalanche activity.
Since more than 15 years, terrestrial laser scanning has widely been used for high resolution snow depth mapping in centimeter accuracy (Prokop, 2008; 2009; Deems et al., 2013). From the beginning the users of the technique were attracted to investigate the conditions in avalanche starting and avalanche run out zones to cover different properties of snow pack and avalanche dynamics (Prokop et al., 2015; Prokop and Procter, 2017). With the development of very long range laser scanners (e.g., RIEGL VZ-6000) that allow scanning of snow surfaces with a suitable laser wavelength of 1,064 nm along ranges of up to 6 km, the method started to interest also avalanche forecasters (Deems et al., 2015; Hancock et al., 2018) and other snow mapping techniques such as structure from motion (SFM) photogrammetry and snow distribution modeling approaches were validated (Bernard et al., 2017; Schön et al., 2018). Accordingly we use different laser scanning devices to measure spatial snow depth distributions and to validate our satellite borne data. Comprehensive reference data of local avalanche releases is indispensable to validate and improve algorithms for avalanche detection in satellite images and to monitor locations with high-risk potential. Also for this work qualitative ground truth measurements of individual slopes for benchmarking the avalanche detection algorithm is essential. For that purpose, we will collect ground truth data by using the RIEGL VZ-6000 as a conventional terrestrial laser scanner (TLS), as described above. Additionally, the potential of state-of-the-art automotive lidars and radars to substitute the expensive classical TLS is currently being investigated.
Current lidar and radar systems for avalanche detection, e.g., as offered by WYSSEN (Wyssen, 2023), are too expensive for country wide applications. Developing new, reliable, and inexpensive measurement and monitoring techniques for avalanches requires emerging cutting-edge technology. These tools, originally developed for high-resolution environment perception in automated vehicles, enable exciting new measurement and monitoring methods for snow height and avalanche detection and quantification, while being robust and cost efficient. Because of the limitations of a TLS, a mobile data logger called MOLISENS (MObile LIdar SENsor System), was developed by the Virtual Vehicle Research GmbH and the University of Graz. The system was used to collect Global Navigation Satellite System (GNSS), inertial measurement unit (IMU), and automotive lidar data as described in Goelles et al. (2022). Currently, MOLISENS is extended (MOLISENS_ext; Figure 7) with additional connectivity options to also encompass data from automotive radar sensors and Lufft weather stations. The latter are able to measure temperature, air pressure, humidity, wind, and precipitation. The system enables the use of the mentioned sensors in remote areas as it is relatively small, lightweight, and battery powered. Successful measurement campaigns were completed, e.g., in a glacier cave in Svalbard and in a stalactite cave in Austria (Goelles et al., 2022).
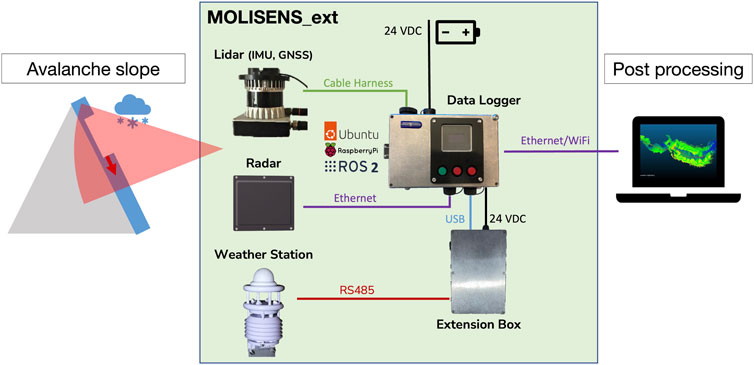
FIGURE 7. In this figure the hardware setup of the MOLISENS_ext system is shown. It is equipped with a GNSS receiver, an IMU, a lidar sensor, a radar sensor, and a weather station.
In the future, MOLISENS_ext should allow us to detect and quantify avalanches within a radius of about 400 m, with a spatial resolution of a few cm, and a temporal resolution of 10–20 Hz. We plan to install this setup on individual slopes in order to monitor snow height and the spatial extend of avalanches. For that purpose, lidar, radar and weather data will be collected before, during, and after avalanche blastings. The collected data are then used for benchmarking and validating the automated avalanche detection based on satellite data and ML algorithms for selected slopes.
TLSs like the RIEGL VZ-6000, which have been used for ground truth acquisition in the past, have various advantages compared to automotive lidar sensors, e.g., higher accuracy, precision, and a higher number of targets per pulse. However, they also come with challenges and limitations compared to available automotive lidar sensors. In Table 2, a comparison between the RIEGL VZ-6000 and two lidars, the OS1-64 and the OS2-64, by Ouster, one of the leading manufacturers, is given. The RIEGL VZ-6000 comes with the clear advantage of a very high spatial resolution as well as a much greater range. On the other hand they are comparably heavy and have a larger form factor compared to the automotive lidars. Furthermore, TLS have a higher power dissipation compared to automotive lidar sensors. The temperature limitation of the VZ-6000 without insulation is 0 °C during operation. The OS1-64 allows much lower operating temperatures down to −40 °C. The advantages of the automotive lidars for ground truth data acquisition is their small size, high temporal resolution and low eye safety class. A significantly lower price of automotive lidar sensors compared to conventional TLS would allow to install them with higher spatial density, e.g., on multiple slopes of a ski resorts.
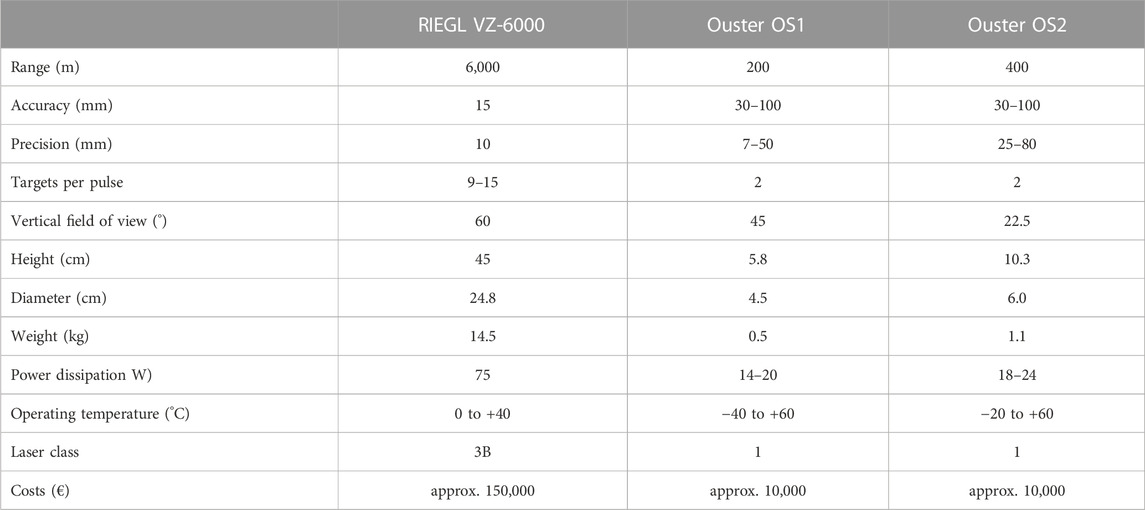
TABLE 2. Comparison between the RIEGL VZ-6000 (RIEGL Laser Measurement Systems GmbH, 2020) as a conventional TLS and the Ouster lidar OS1 (Ouster Inc., 2022a) and OS2 (Ouster Inc., 2022b) as automotive lidars. The form factors and weights are given without batteries, case, and tripod.
A serious drawback for lidar in general and automotive lidar in particular is the range degradation under adverse weather. Automotive radar sensors have a similar range but are much less affected by adverse weather conditions (Muckenhuber et al., 2021). Therefore, automotive radar will be tested in this context to assess their potential to detect avalanches compared to classical avalanche radars. They have a significantly shorter range than avalanche radars, but their scalability due to lower costs, smaller size and lower power output could overcompensate for that. Modern automotive and traffic monitoring radar sensors typically operate at 24 GHz (e.g., Smartmicro TRUGRD Stream) or 77 GHz (e.g., Continental ARS540), have a range of up to 300 m, and apply frequency-modulated continuous wave (FMCW) technologies for relative distance and velocity estimation and digital beam forming to control the direction of the emitted wave (Marti et al., 2019). In addition to data on object level (i.e., list of detected road participants), radar data is typically also provided as radar clusters. Clusters represent radar detections with information like position, velocity, and signal strength. This raw data format allows us to develop and apply new algorithms for detecting changes in the backscatter behavior of the environment caused by avalanches.
To summarize, if deployed in a distributed manner, the advantages of automotive sensors over classical systems, will make it possible to collect ground truth data of a large number of avalanche zones with high temporal resolution. Building on our experience with MOLISENS, we will develop a strategy for its operational use in local avalanche monitoring in Austria. For lidar and radar point cloud processing, we will use the Python package “pointcloudset” described in Goelles et al. (2021) which supports analyzing large datasets consisting of point clouds recorded over time. For validating the proposed system, we plan to collect data with the RIEGL VZ-6000.
We plan to set up the first fully automated avalanche detection system for Austria based on Sentinel-1 SAR images. We will include weather reanalysis data into the data pipeline to improve the detection performance. In addition, we will further develop the MOLISENS platform, which incorporates automotive radar and lidar sensors, to acquire local (individual slopes) ground truth data in an automated, cost-efficient, and scalable way. In the future, these complementary measurements shall be able to constantly assess and validate the performance of the SAR-based regional detection algorithm in the Austrian Alps.
Our goal is to facilitate the application of the data pipeline, including the ML algorithm as well as the newly developed strategies for local ground truth monitoring. The data pipeline shall be used by the Austrian avalanche warning services, and the presented concept for in-situ ground truth data shall aid to establish comprehensive and inexpensive local snow and avalanche monitoring. A collection of Austrian avalanche maps for 2014-today and analysis of the results with respect to, e.g., weather, location, or snow type shall be publicly made available. The avalanche warning system in Austria is currently based on experts’ experience, observations and data. We want to provide automated and reliable additional data to base their judgment upon.
Several skiing resorts use ground-based measurements that make use of infrasonic, optical, lidar, and radar sensors. These systems can detect avalanches well, in general, on a limited local scale, but are very expensive (and therefore not well suited for up-scaling) and have several limitations, e.g., infrasonic sensors show unreliable detection for medium and small avalanches (less than 105 m2) and in more than 3 km distance from the sensors (Mayer et al., 2020), ground-based radar systems can only detect avalanches within their line of sight (Schimmel et al., 2017), to name a few. Therefore, we will evaluate the potential of the satellite-based avalanche detection pipeline and the automotive sensor-based ground truth monitoring for applications in ski resorts together with the respective ski resort operators.
We will investigate how the integrated data pipeline (based on both satellite and automotive sensor data) can be exploited in the best possible way for operational avalanche danger evaluation. We will assess the potential of the developed data pipeline for avalanche forecasting based on weather forecast and cross validation with historic weather and avalanche data. This is the first approach that tries to combine SAR together with ground truth and weather data to help avalanche danger assessment in an automated manner.
In addition, we want to produce and publish the first dataset of historic avalanches from 2014 onwards for the whole Austrian Alps. This avalanche inventory shall be made publicly available to serve as reference dataset for training and validation of forthcoming ML approaches.
A milestone on the path to setting up an automated avalanche detection and monitoring tool for Austria is the generation of an avalanche outline dataset that may serve as initial validation dataset for the algorithm. A further task is to improve the detection rate regarding the resolution of the Sentinel-1 data, since only larger avalanches are detected, in general. A possible approach to improve the resolution may be LRW as proposed and tested on avalanches by Small et al. (2022) and Tompkin and Leinss (2021), respectively. A challenge that needs to be tackled is the improvement of the visibility of dry snow avalanches in SAR images. Furthermore, a multisensor approach taking into account optical satellite data and ground truth measurements can potentially complement the SAR detections.
Currently, there is no automated snow avalanche detection tool in operational use in Austria. However, first approaches of avalanche detection from SAR satellite images have been proven more than successful and therefore deem promising tools for Austria. Hence, we introduce here the first approaches to an automated avalanche detection system and a roadmap for a monitoring and forecasting tool for Austria. The Copernicus Sentinel-1 mission provides free of charge and weather independent access to satellite data that greatly facilitates our propositions. A state of the art data pipeline together with a suitable ML approach build the core of the detection algorithm. Our approach will be complimented by ground truth measurements with the novel MOLISENS platform.
The importance of weather parameters - together with snowpack properties and terrain - are undisputable for the release of avalanches. Therefore, our comprehensive approach of the combination of satellite and weather data is promising for the improvement of the detection results.
A major reason why an automated detection system has not yet been set up for Austria is the lack of a complete and high quality training and validation avalanche archive. Here, we present the first steps to gather a comprehensive avalanche inventory for Austria. In the future, our tool may help the Austrian avalanche services as well as local avalanche commissions to improve the avalanche risk assessment, avalanche documentation and forecasting for Austria.
A future task may be to take into account deep learning approaches from other areas, e.g., landslides show similar characteristics as snow avalanches, are bound to gravity and topographical features. The detection of landslides from satellite images has made impressive advances (e.g., Gudiyangada Nachappa et al., 2019; Ghorbanzadeh et al., 2022), which may be applicable to the detection of snow avalanches as well.
Publicly available datasets were analyzed in this study. This data can be found here: https://www.envidat.ch/#/metadata/spot6-avalanche-outlines-24-january-2018, https://www.envidat.ch/#/metadata/spot6-avalanche-outlines-16-january-2019, and https://asf.alaska.edu/.
KLK, TG, SM, AT, JA, ME, JG contributed to the conceptualization. KLK, TG, SM, AT, JA, BS, ME, JG, EM, AP, and WS contributed to the funding acquisition. CG, BS, TG, SM, and AP contributed to the lidar section. KLK, TG, SM, JA, JG, ME, and EM contributed to the ground truth data collection. KLK, ME, JG, CG, BS, and TG prepared the figures. SM, KLK, TG, BS, and WS contributed to the project administration. KLK, SM, TG, AT, JA, BS, CG, JG, and AP contributed to the writing of the original draft. TG developed the integration of weather data. TG, KLK, and AT developed the data pipeline concept. ME, JG, and EM contributed to the SAR data and SAR processing method. KLK, SM, TG, BS, WS, JG, ME, and CG contributed to the writing and editing of the revised manuscript.
This work was funded by the program “Austrian Space Application Programme” of the Austrian research funding association (FFG) by the project grants 885369 (SnowAV_AT) and 897647 (RSnowAUT). The authors acknowledge the financial support by the University of Graz.
The authors would like to acknowledge the financial support of the COMET K2 - Competence Centers for Excellent Technologies Programme supported by the Austrian Federal Ministries for Climate Action, Environment, Energy, Mobility, Innovation and Technology (BMK) and for Digital and Economic Affairs (BMDW), represented by the Austrian research funding association (FFG), the federal state of Styria and the Styrian Business Promotion Agency (SFG). The Austrian Research Promotion Agency (FFG) has been authorized for the programme management. We also thank the LWD Tirol for providing a large collection of avalanche data. Furthermore, we are thankful for NORCE and their researchers who provided us with the preprocessed SAR satellite data. We thank the University of Graz and Virtual Vehicle Research GmbH for providing the infrastructure to write the article and perform the research.
The authors SM, TG, and BS were employed by company Virtual Vehicle Research GmbH. Author AT was employed by company Know Center GmbH. Author AP was employed by company Snow Scan GmbH.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Abermann, J., Eckerstorfer, M., Malnes, E., and Hansen, B. U. (2019). A large wet snow avalanche cycle in west Greenland quantified using remote sensing and in situ observations. Nat. Hazards 97, 517–534. doi:10.1007/s11069-019-03655-8
Ahmed, A. E., Allen, J. M., Bhat, T., Burra, P., Fliege, C. E., Hart, S. N., et al. (2021). Design considerations for workflow management systems use in production genomics research and the clinic. Sci. Rep. 11, 21680. doi:10.1038/s41598-021-99288-8
Alam, S., Bălan, L., Chan, N. L., Comym, G., Dada, Y., Danov, I., et al. (2022). Version: 0.18.1. Date released: 2022-05-09. Available at: https://github.com/kedro-org/kedro.
Amstutz, P., Mikheev, M., Crusoe, M. R., Tijanić, N., Lampa, S., and Cock, P. (2022). “Existing Workflow systems,” in Common Workflow Language wiki, GitHub. https://s.apache.org/existing-workflow-systems, (Accessed December 13, 2023).
Avian, M., Bauer, C., Schlögl, M., Widhalm, B., Gutjahr, K. H., Paster, M., et al. (2020). The status of Earth observation techniques in monitoring high mountain environments at the example of pasterze glacier, Austria: Data, methods, accuracies, processes, and scales. Remote Sens. 12, 1251. doi:10.3390/RS12081251
Bernard, E., Friedt, J., Tolle, F., Griselin, M., Marlin, C., and Prokop, A. (2017). Investigating snowpack volumes and icing dynamics in the moraine of an arctic catchment using uav photogrammetry. Photogrammetric Rec. 32, 497–512. doi:10.1111/phor.12217
Bianchi, F. M., Grahn, J., Eckerstorfer, M., Malnes, E., and Vickers, H. (2021). Snow avalanche segmentation in s ar images with fully convolutional neural networks. IEEE J. Sel. Top. Appl. Earth Observations Remote Sens. Inst. Electr. Electron. Eng. (IEEE) 14, 75–82. doi:10.1109/jstars.2020.3036914
Bühler, Y., Bieler, C., Pielmeier, C., Frauenfelder, R., Jaedicke, C., Bippus, C., et al. (2014a). “Final report,” in Improved alpine avalanche forecast service AAF. Editor B. Barresi, 1–22.
Bühler, Y., Bieler, C., Pielmeier, C., Wiesmann, A., Caduff, R., Frauenfelder, R., et al. (2014b). “All-weather avalanche activity monitoring from space,” in Proceedings of the international snow science workshop (Banff, Canada), 795–802.
Bühler, Y., Hafner, E. D., Zweifel, B., Zesiger, M., and Heisig, H. (2019). Where are the avalanches? Rapid spot 6 satellite data acquisition to map an extreme avalanche period over the Swiss alps. Cryosphere 13, 3225–3238. doi:10.5194/tc-13-3225-2019
Captum (2023). Captum. https://captum.ai/ (Accessed January 28, 2023).
Coléou, C., Karbou, F., Deschartes, M., Martin, R., Dufour, A., and Eckert, N. (2018). “The use of sar satellite ob servations to evaluate avalanche activities in the French alps during remarkable episodes of the 2017-2018 season,” in The title of the conference proceedings. International Snow Science Workshop. Editors E. Name1, and E. Name2 (Innsbruck, Austria), 41–50.
Deems, J. S., Gadomski, P. J., Vellone, D., Evanczyk, R., LeWinter, A. L., Birkeland, K. W., et al. (2015). Mapping starting zone snow depth with a ground-based lidar to assist avalanche control and forecasting. Cold Regions Sci. Technol. 120, 197–204. doi:10.1016/j.coldregions.2015.09.002
Deems, J. S., Painter, T. H., and Finnegan, D. C. (2013). Lidar measurement of snow depth: A review. J. Glaciol. 59, 467–479. doi:10.3189/2013jog12j154
Eckerstorfer, M., Bühler, Y., Frauenfelder, R., and Malnes, E. (2017a). Remote sensing of snow avalanches: Rece nt advances, potential, and limitations. Cold Regions Sci. Technol. 121, 126–140. doi:10.1016/j.coldregions.2015.11.001
Eckerstorfer, M., and Malnes, E. (2015). Manual detection of snow avalanche debris using high-resolution radarsat-2 sar images. Cold Regions Sci. Technol. 120, 205–218. doi:10.1016/j.coldregions.2015.08.016
Eckerstorfer, M., Malnes, E., and Müller, K. (2017b). A complete snow avalanche activity record from a Norwegian forecasting region using sentinel-1 satellite-radar data. Cold Regions Sci. Technol. 144, 39–51. doi:10.1016/j.coldregions.2017.08.004
Eckerstorfer, M., Oterhals, H. D., Müller, K., Malnes, E., Grahn, J., Langeland, S., et al. (2022). Performance of manual and automatic detection of dry snow avalanches in sentinel-1 sar images. Cold Regions Sci. Technol. 198, 103549. doi:10.1016/j.coldregions.2022.103549
Eckerstorfer, M., Vickers, H., Malnes, E., and Grahn, J. (2019). Near-real time automatic snow avalanche activity monitoring system using sentinel-1 sar data in Norway. Remote Sens. 11, 2863. doi:10.3390/rs11232863
European avalanche Warning Services (2023). European avalanche Warning Services: EAWS https://www.avalanches.org/ (Accessed March 20, 2023).
Geoprevent, A. G. (2022). Technology guide for monitoring of gravitational natural hazards. 2nd edition. (Accessed 01 04 2023).
Ghorbanzadeh, O., Xu, Y., Zhao, H., Wang, J., Zhong, Y., Zhao, D., et al. (2022). The outcome of the 2022 landslide4sense competition: Advanced landslide detection from multisource satellite imagery. IEEE J. Sel. Top. Appl. Earth Observations Remote Sens. 15, 9927–9942. doi:10.1109/JSTARS.2022.3220845
Goelles, T., Hammer, T., Muckenhuber, S., Schlager, B., Abermann, J., Bauer, C., et al. (2022). Molisens: Mobile lidar sensor system to exploit the potential of small industrial lidar devices for geoscientific applications. Geoscientific Instrum. Methods Data Syst. 11, 247–261. doi:10.5194/gi-11-247-2022
Goelles, T., Schlager, B., Muckenhuber, S., Haas, S., and Hammer, T. (2021). pointcloudset‘: Efficient analysis of large datasets of point clouds recorded over time. J. Open Source Softw. 6, 3471. doi:10.21105/joss.03471
Gomes, V. C. F., Queiroz, G. R., and Ferreira, K. R. (2020). An overview of platforms for big Earth observation data management and analysis. Remote Sens. 12, 1253. doi:10.3390/rs12081253
Gudiyangada Nachappa, T., Tavakkoli Piralilou, S., Ghorbanzadeh, O., Shahabi, H., and Blaschke, T. (2019). Landslide susceptibility mapping for Austria using geons and optimization with the dempster-shafer theory. Appl. Sci. Switz. 9, 5393. doi:10.3390/app9245393
Hafner, E. D., Barton, P., Daudt, R. C., Wegner, J. D., Schindler, K., and Bühler, Y. (2022). Automated avalanche mapping from spot 6/7 satellite imagery with deep learning: Results, evaluation, potential and limitations. Cryosphere 16, 3517–3530. doi:10.5194/tc-16-3517-2022
Hafner, E. D., and Bühler, Y. (2021). “SPOT6 avalanche outlines 16 January2019,” in EnviDat. doi:10.16904/envidat.235,2021
Hafner, E. D., and Bühler, Y. (2019). “SPOT6 avalanche outlines 24 january 2018,” in EnviDat. doi:10.16904/envidat.77,2019
Hafner, E. D., Techel, F., Leinss, S., and Bühler, Y. (2021). Mapping avalanches with satellites-evaluation of performance and completeness. Cryosphere 15, 983–1004. doi:10.5194/tc-15-983-2021
Haiden, T., Kann, A., Wittmann, C., Pistotnik, G., Bica, B., and Gruber, C. (2011). The integrated nowcasting through comprehensive analysis (INCA) system and its validation over the eastern alpine region. Weather Forecast. 26, 166–183. doi:10.1175/2010WAF2222451.1
Hamar, J. B., Salberg, A.-B., and Ardelean, F. (2017). “Automatic detection and mapping of avalanches in sar images,” in IEEE international geoscience and remote sensing symposium (IGARSS) (IEEE), 689–692.
Hamman, J., and Kent, J. (2021). Scikit-downscale: An open source python package for scalable climate downscaling. doi:10.1002/essoar.10507604.1
Hancock, H., Prokop, A., Eckerstorfer, M., and Hendrikx, J. (2018). Combining high spatial resolution snow mapping and meteorological analyses to improve forecasting of destructive avalanches in longyearbyen, svalbard. Cold Reg. Sci. Technol. 154, 120–132. doi:10.1016/j.coldregions.2018.05.011
Haq, M. A., Alshehri, M., Rahaman, G., Ghosh, A., Baral, P., and Shekhar, C. (2021a). Snow and glacial feature identification using hyperion dataset and machine learning algorithms. Arabian J. Geosciences 14, 1–21. doi:10.1007/s12517-021-07434-3
Haq, M. A., Azam, M. F., and Vincent, C. (2021b). Efficiency of artificial neural networks for glacier ice-thickness estimation: A case study in Western himalaya, India. J. Glaciol. 67 (264), 671–684. doi:10.1017/jog.2021.19
Haq, M. A., Ghosh, A., Rahaman, G., and Baral, P. (2019). Artificial neural network-based modeling of snow properties using field data and hyperspectral imagery. Nat. Resour. Model. 32, 1–36. doi:10.1111/nrm.12229
Hersbach, H., Bell, B., Berrisford, P., Hirahara, S., Horányi, A., Muñoz-Sabater, J., et al. (2020). The ERA5 global reanalysis. Q. J. R. Meteorological Soc. 146, 1999–2049. doi:10.1002/qj.3803
Kummervold, P. E., Malnes, E., Eckerstorfer, M., Arntzen, I. M., and Bianchi, F. (2018). Avalanche detection in sentinel-1 radar images using convolutional neural networks. Proc. Int. Snow Sci. Workshop., 377–381.
Larsen, S. Ø., Salberg, A.-B., and Solberg, R. (2010). “Automatic detection of avalanches in high-resolution optical satellite data,” in Results from the ESA avalRS project’s feasibility study on automated avalanche detection, 1–38. Note no: SAMBA/04/10 (Norwegian Computing Center).
Lato, M. J., Frauenfelder, R., and Bühler, Y. (2012). Automated detection of snow avalanche deposits: Segmentation and classification of optical remote sensing imagery. Nat. Hazards Earth Syst. Sci. 12, 2893–2906. doi:10.5194/nhess-12-2893-2012
LAWIS (2023). LAWIS database. Available at: https://lawis.at/.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learning. nature 521, 436–444. doi:10.1038/nature14539
Leinss, S., Wicki, R., Holenstein, S., Baffelli, S., and Bühler, Y. (2020). Snow avalanche detection and mapping in multitemporal and multiorbital radar images from terrasar-x and sentinel-1. Nat. Hazards Earth Syst. Sci. 20, 1783–1803. doi:10.5194/nhess-20-1783-2020
Leipzig, J. (2017). A review of bioinformatic pipeline frameworks. Briefings Bioinforma. 18, 530–536. doi:10.1093/bib/bbw020
Malnes, E., Eckerstorfer, M., Larsen, Y., Frauenfelder, R., Jónsson, Á., Jaedicke, C., et al. (2013). “Remote sensing of avalanches in northern Norway using synthetic aperture radar,” in International snow science workshop grenoble 2013, 955–959.
Marti, E., de Miguel, M., Garcia, F., and Perez, J. (2019). A review of sensor technologies for perception in automated driving. IEEE Intell. Transp. Syst. Mag. 11, 94–108. doi:10.1109/mits.2019.2907630
Mayer, S., van Herwijnen, A., Ulivieri, G., and Schweizer, J. (2020). Evaluating the performance of an operational infrasound avalanche detection system at three locations in the Swiss Alps during two winter seasons. Cold Regions Sci. Technol. 173, 102962. doi:10.1016/j.coldregions.2019.102962
Merkel, D. (2014). Docker: Lightweight linux containers for consistent development and deployment. Linux J. 2014, 2.
Muckenhuber, S., Museljic, E., and Stettinger, G. (2021). Performance evaluation of a state-of-the-art automotive radar and corresponding modeling approaches based on a large labeled dataset, 1–20. doi:10.1080/15472450.2021.1959328
Nijhawan, R., Das, J., and Raman, B. (2019). A hybrid of deep learning and hand-crafted features based approach for snow cover mapping. Int. J. Remote Sens. 40, 759–773. doi:10.1080/01431161.2018.1519277
Nolting, S., Marin, C., Steger, S., Schneiderbauer, S., Notarnicola, C., and Zebisch, M. (2018). “Regional scale statistical mapping of snow avalanche likelihood and its combination with an optical remote sensing based avalanche detection approach - first attempts for the province of south tyrol (Italy),” in Proceedings, international snow science workshop (Austria: Innsbruck), 382–387.
NVE Satskred Norway (2022). Norwegian avalanche warning service. Available at: https://satskred.nve.no/.
Olefs, M., Koch, R., Schöner, W., and Marke, T. (2020). Changes in snow depth, snow cover duration, and potential snowmaking conditions in Austria, 1961–2020 – A model based approach. Atmosphere 11, 1330. doi:10.3390/atmos11121330
Olefs, M., Schöner, W., Suklitsch, M., Wittmann, C., Niedermoser, B., Neururer, A., et al. (2013). “Snowgrid – A new operational snow cover model in Austria,” in International snow science workshop grenoble–chamonix mont-blanc, 38–45. ed. 2.
Ouster Inc. (2022a). Ouster OS1 Rev06 datasheet https://data.ouster.io/downloads/datasheets/datasheet-rev06-v2p4-os1.pdf (Accessed January 04, 2023).
Ouster Inc. (2022b). Ouster OS2 Rev06 datasheet. https://data.ouster.io/downloads/datasheets/datasheet-rev06-v2p4-os2.pdf (Accessed January 04, 2023).
Prokop, A. (2008). Assessing the applicability of terrestrial laser scanning for spatial snow depth measurements. Cold Reg. Sci. Technol. 54, 155–163. doi:10.1016/j.coldregions.2008.07.002
Prokop, A., and Procter, E. S. (2017). A new methodology for planning snow drift fences in alpine terrain. Cold Reg. Sci. Technol. 132, 33–43. doi:10.1016/j.coldregions.2016.09.010
Prokop, A., Schön, P., Singer, F., Pulfer, G., Naaim, M., Thibert, E., et al. (2015). Merging terrestrial laser scanning technology with photogrammetric and total station data for the determination of avalanche modeling parameters. Cold Reg. Sci. Technol. 110, 223–230. doi:10.1016/j.coldregions.2014.11.009
Prokop, A. (2009). “Terrestrial laser scanning for snow depth observations: An update on technical developments and applications,” in Proceedings of the international snow science workshop Davos 2009. Editors J. Schweizer, and A. V. Herwijnen (Switzerland, 192–196.
Rahmati, O., Ghorbanzadeh, O., Teimurian, T., Mohammadi, F., Tiefenbacher, J. P., Falah, F., et al. (2019). Spatial modeling of snow avalanche using machine learning models and geo-environmental factors: Comparison of effectiveness in two mountain regions. Remote Sens. 11, 2995. doi:10.3390/rs11242995
RIEGL Laser Measurement Systems GmbH (2020). Riegl vz-6000 datasheet. online (Accessed 01 04, 2023).
Ronneberger, O., Fischer, P., and Brox, T. (2015). “U-net: Convolutional networks for biomedical image segmentation,” in Lecture notes in computer science (including subseries lecture notes in artificial intelligence and lecture notes in bioinformatics), 9351, 234–241. N. N., H. J., W. W., and F. A. (Computing and Computer-Assisted Intervention - MICCAI). doi:10.1007/978-3-319-24574-4_28
Schimmel, A., Hübl, J., Koschuch, R., and Reiweger, I. (2017). Automatic detection of avalanches: Evaluation of t hree different approaches. Nat. Hazards 87, 83–102. doi:10.1007/s11069-017-2754-1
Schön, P., Naaim-Bouvet, F., Vionnet, V., and Prokop, A. (2018). Merging a terrain-based parameter with blowing snow fluxes for assessing snow redistribution in alpine terrain. Cold Regions Sci. Technol. 155, 161–173. doi:10.1016/j.coldregions.2018.08.002
Small, D., Rohner, C., Miranda, N., Ruetschi, M., and Schaepman, M. E. (2022). Wide-area analysis-ready radar backscatter composites. IEEE Trans. Geoscience Remote Sens. 60, 1–14. doi:10.1109/TGRS.2021.3055562
Stewart, A. J., Robinson, C., Corley, I. A., Ortiz, A., Lavista Ferres, J. M., and Banerjee, A. (2022). “TorchGeo: Deep learning with geospatial data,” in Proceedings of the 30th international conference on advances in geographic information systems (Seattle, Washington: Association for Computing Machinery), 1–12. SIGSPATIAL ’22,. doi:10.1145/3557915.3560953
Techel, F., Jarry, F., Kronthaler, G., Nairz, S. M. P., Pavšek, M., Pavsek, M., et al. (2016). Avalanche fatalities in the European alps: Long-term trends and statistics. Geogr. Helvetica 71, 147–159. doi:10.5194/gh-71-147-2016
Tompkin, C., and Leinss, S. (2021). Backscatter characteristics of snow avalanches for mapping with local resolution weighting. IEEE J. Sel. Top. Appl. Earth Observations Remote Sens. 14, 4452–4464. doi:10.1109/JSTARS.2021.3074418
Tsai, Y.-L. S., Dietz, A., Oppelt, N., and Kuenzer, C. (2019). Wet and dry snow detection using sentinel-1 sar data for mountainous areas with a machine learning technique. Remote Sens. 11 (8), 895. doi:10.3390/rs11080895
Ulaby, F. T., Moore, R. K., and Fung, A. K. (1987). Microwave remote sensing. active and passive. from theory to applications. Geol. Mag. 124, 88–2162. doi:10.1017/S0016756800015831
Vickers, H., Eckerstorfer, M., Malnes, E., and Doulgeris, A. (2017). “Synthetic aperture radar (sar) monitoring of avalanche activity: An automated detection scheme,” in Image analysis. Editors P. Sharma, and F. Bianchi (Springer International Publishing), 136–146.
Vickers, H., Eckerstorfer, M., Malnes, E., Larsen, Y., and Hindberg, H. (2016). A method for automated snow avalanche debris detection through use of synthetic aperture radar (sar) imaging. Earth Space Sci. 3, 446–462. doi:10.1002/2016EA000168
Voumard, J., Derron, M. H., and Jaboyedoff, M. (2018). Natural hazard events affecting transportation networks in Switzerland from 2012 to 2016. Nat. Hazards Earth Syst. Sci. 18, 2093–2109. doi:10.5194/nhess-18-2093-2018
Waldeland, A. U., Reksten, J. H., and Salberg, A.-B. (2018). “Avalanche detection in sar images using deep learning,” in IGARSS 2018-2018 IEEE international geoscience and remote sensing symposium (IEEE), 2386–2389.
Wendleder, A., Lanzenberger, T., and Schmitt, A. (2021). “The detection of snow avalanches using terrasar-x data,” in EUSAR 2021; 13th European conference on synthetic aperture radar (VDE), 1–4.
Wesselink, D. S., Malnes, E., Eckerstorfer, M., and Lindenbergh, R. C. (2017). Automatic detection of snow avalanche debris in central svalbard using c-band sar data. Polar Res. 36 (1), 1333236. doi:10.1080/17518369.2017.1333236
Wiesmann, A., Wegmüller, U., Honikel, M., Strozzi, T., and Werner, C. L. (2001). “Potential and methodology of satellite based SAR for hazard mapping, ” in IGARSS 2001. Scanning the present and resolving the future. proceedings. IEEE 2001 international geoscience and remote sensing symposium (Cat. No. 01CH37217) (IEEE) 7, 3262–3264.
Wratten, L., Wilm, A., and Goke, J. (2021). Reproducible, scalable, and shareable analysis pipelines with bioinformatics workflow managers. Nat. METHODS 18, 1161–1168. doi:10.1038/s41592-021-01254-9
Wyssen (2023). Wyssen Avalanche Control AG. https://www.wyssenavalanche.com/ (Accessed January 24, 2023).
Zhou, Z., Rahman Siddiquee, M. M., Tajbakhsh, N., and Liang, J. (2018). “Unet++: A nested u-net architecture for medical image segmentation,” in Deep learning in medical image analysis and multimodal learning for clinical decision support: 4th international workshop, DLMIA 2018, and 8th international workshop, ML-CDS 2018 (Springer), 3–11. Held in Conjunction with MICCAI 2018, Granada, Spain, September 20, 2018, Proceedings 4.
Keywords: remote sensing, synthetic aperture radar, machine learning, sentinel-1, Austrian alps, U-net, snow avalanches
Citation: Kapper KL, Goelles T, Muckenhuber S, Trügler A, Abermann J, Schlager B, Gaisberger C, Eckerstorfer M, Grahn J, Malnes E, Prokop A and Schöner W (2023) Automated snow avalanche monitoring for Austria: State of the art and roadmap for future work. Front. Remote Sens. 4:1156519. doi: 10.3389/frsen.2023.1156519
Received: 01 February 2023; Accepted: 29 March 2023;
Published: 21 April 2023.
Edited by:
Omid Ghorbanzadeh, Institute of Advanced Research in Artificial Intelligence (IARAI), AustriaReviewed by:
Mohd Anul Haq, Majmaah University, Saudi ArabiaCopyright © 2023 Kapper, Goelles , Muckenhuber , Trügler , Abermann , Schlager , Gaisberger , Eckerstorfer , Grahn , Malnes , Prokop and Schöner . This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Kathrin Lisa Kapper, a2F0aHJpbmxpc2Eua2FwcGVyQHVuaS1ncmF6LmF0
†These authors have contributed equally to this work
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.