 Elham Kowsari
Elham Kowsari Reza Ghabcheloo
Reza Ghabcheloo
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
CORRECTION article
Front. Robot. AI , 01 October 2024
Sec. Robotic Control Systems
Volume 11 - 2024 | https://doi.org/10.3389/frobt.2024.1491980
This article is part of the Research Topic Learning and Adaptive Control Systems on Robotics View all 3 articles
A Corrigendum on
Optimal sway motion reduction in forestry cranes
by Kowsari E and Ghabcheloo R (2024). Front. Robot. AI 11:1417741. doi: 10.3389/frobt.2024.1417741
In the published article, there was an error in Figure 7 as published. The figure was incorrectly replaced with a duplicate of Figure 4, resulting in the intended Figure 7 not being displayed. The corrected Figure 7 and its caption appear below.
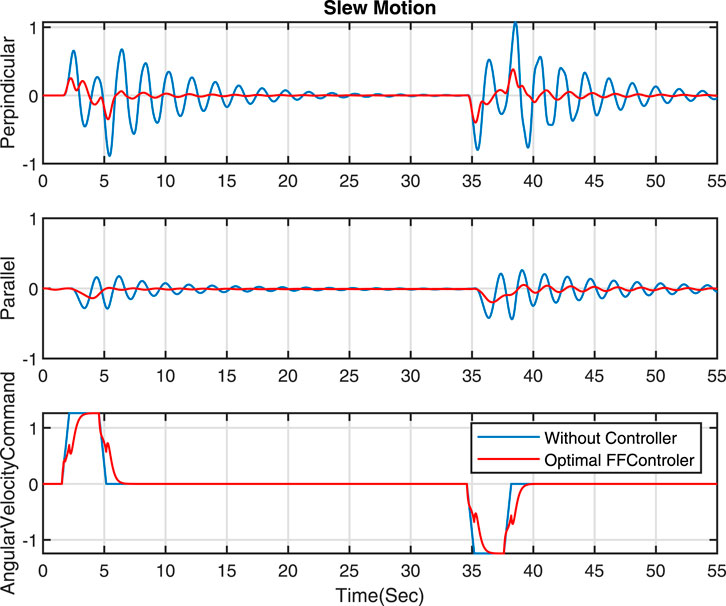
Figure 7. Comparison of optimal FF controller and without a controller - Slew motion.
The authors apologize for this error and state that this does not change the scientific conclusions of the article in any way. The original article has been updated.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Keywords: sway damping, optimal control, forestry machinery automation, forwarder, feedforward (FF) control
Citation: Kowsari E and Ghabcheloo R (2024) Corrigendum: Optimal sway motion reduction in forestry cranes. Front. Robot. AI 11:1491980. doi: 10.3389/frobt.2024.1491980
Received: 05 September 2024; Accepted: 18 September 2024;
Published: 01 October 2024.
Approved by:
Frontiers Editorial Office, Frontiers Media SA, SwitzerlandCopyright © 2024 Kowsari and Ghabcheloo. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Elham Kowsari, ZWxoYW0ua293c2FyaUB0dW5pLmZp
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.