 Daniel C. Tozadore
Daniel C. Tozadore Roseli A. F. Romero
Roseli A. F. Romero- 1CHILI Lab, School of Information and Computer Science, École Polytechnique Fédérale de Lausanne (EPFL), Lausanne, Switzerland
- 2Robot Learning Laboratory, Instituto de Ciências Matemáticas e de Computação (ICMC), University of São Paulo (USP), SãoCarlos, Brazil
Research on social assistive robots in education faces many challenges that extend beyond technical issues. On one hand, hardware and software limitations, such as algorithm accuracy in real-world applications, render this approach difficult for daily use. On the other hand, there are human factors that need addressing as well, such as student motivations and expectations toward the robot, teachers’ time management and lack of knowledge to deal with such technologies, and effective communication between experimenters and stakeholders. In this paper, we present a complete evaluation of the design process for a robotic architecture targeting teachers, students, and researchers. The contribution of this work is three-fold: (i) we first present a high-level assessment of the studies conducted with students and teachers that allowed us to build the final version of the architecture’s module and its graphical interface; (ii) we present the R-CASTLE architecture from a technical perspective and its implications for developers and researchers; and, finally, (iii) we validated the R-CASTLE architecture with an in-depth qualitative analysis with five new teachers. Findings suggest that teachers can intuitively import their daily activities into our architecture at first glance, even without prior contact with any social robot.
1 Introduction
Technology is being developed faster than ever (Roser, 2023). However, some of its outcomes are far from achieving their full potential. Socially assistive robotics (SAR), a field of robotics that focuses on assisting users through social rather than physical interaction, is a good example of this category of technology with many boundaries to be deeply extended (Matarić and Scassellati, 2016). In education, for instance, social robots for human–robot interaction (HRI) have significantly grown as a research field due to their advantages in enhancing students’ learning experience. Such advantages are simply momentarily boosting student motivation by being a novelty (Van Minkelen et al., 2020), being supportive coaches in language learning activities (Konijn et al., 2022), providing a tangible and tutor peer for studying (Ligthart et al., 2023), stimulating the feeling of rapport building and responsibility of taking care (Kory-Westlund and Breazeal, 2019), an indefatigable companion for wellbeing exercises in schools (Scoglio et al., 2019), and consequently, but not always, leading to learning gains (Johal et al., 2018).
Two noteworthy gaps are still underexplored in this field: the difficulty of conducting long-term studies, which has resulted in a significant decrease in the number of experiments lasting longer than two sessions (Woo et al., 2021), and the limited number of studies involving SAR in education that incorporate teachers and stakeholders in their field studies (Smakman et al., 2021a). These phenomena are often attributed, in addition to the many technical challenges, to the highly demanding multidisciplinary level that using SAR in education requires (Belpaeme et al., 2018) and to the teachers’ lack of time due to their already overwhelming workload (van Ewijk et al., 2020). As a result, few studies using social robots are published in journals, and this number is even smaller when it comes to long-term interaction studies (Woo et al., 2021).
Additionally, the success of long-term experiments, from the children’s motivation perspective, depends on mitigating the monotony inherent in the repetitive behaviours of robots once the initial novelty has worn off (de Jong et al., 2022). Studies have tackled this issue by incorporating adaptive behaviours into the robots, aiming for personalised treats for each child (Alam, 2022). These aspects are not only important to keep children motivated for longer periods of time but also to align with the principles of Industry 5.0, where human-based approaches are the core of the next industrial revolution (Ordieres-Meré et al., 2023). However, there is a lack of scalability in their approach to other activities and contents, as well as no deep accounting for the role of teachers in their implementation.
Concerning teachers’ incorporation into the design process and their willingness to adopt social robots, much cooperation and teamwork building has yet to be done between teachers and researchers. Although it is unfeasible to miraculously extend teachers’ daily hours beyond the conventional 24-hour limit, collaborative efforts can be directed toward the development of algorithms capable of automating certain aspects of their workload. This technological intervention can potentially alleviate some of the burden on teachers, thereby contributing to time savings in their professional responsibilities. For example, teachers could use robots to perform fixation exercises after classes and correct examinations with autonomous assessment algorithms (Lin et al., 2020).
One key element for achieving this desirable synergy is efficient communication between the involved parts (Arnold et al., 2021). Therefore, we postulated that graphical interfaces where teachers can insert their content through tables and see charts of student performance can foster the discussion of design, implementation, and result analysis, which are essential for bringing teachers into the loop in such studies (Szafir and Szafir, 2021).
Taking into consideration the mentioned advantages, limitations, and opportunities, the R-CASTLE (Robotic-Cognitive Adaptive System for Teaching and Learning) project emerged, aiming to deliver a unified HRI setup for experimental studies in education with a set of goals based on literature and practical needs: (1) providing the students with a tutor robot for personalised adaptive learning through multimodal analysis (autonomous content approaching in fixation exercises); (2) facilitate teacher participation by affording easy content insertion, system variable setting, and visual analysis of student and system performance in the executed sessions; and (3) allow more practical participation of researchers through visual reports of algorithm performance analysis and easy method changing as the system’s functionalities.
In this work, we present the final state of the R-CASTLE architecture, the methodological approaches to address the limitations and achieve the goals, and the lessons learned throughout its studies and development. More concretely, we summarize the performed user studies, focussing on their outcomes and implications for the technical implementation that is presented next. Additionally, a user validation was performed with five teachers who had not participated in any activity with social robots before. Therefore, they delivered a first-time perception of our solution, fitting the conditions in which we expect our system to be applied. Qualitative analysis of this validation confirms our hypothesis that the R-CASTLE has a high potential to promote social robots in educational settings by fostering collaboration between teachers and researchers.
Therefore, the main contribution of this work is a high-level analysis of the multiple user studies conducted at every step of the project and their implications from the teachers’, students’, and researchers’ points of view. We also present an analysis of how these results and adjustments impact long-term studies and teacher–researcher communication. Due to COVID-19, the long-term validation of the architecture in classrooms was not possible, leading to a deeper evaluation of teacher perspectives regarding using robots in the classroom in their activities. The results of this qualitative analysis showed a higher coherence with the teachers’ statements about adjustments made after the user-centric studies during the architecture design stage. Teachers also suggested that the interfaces for easy translation of their activity to HRI setups, as well as for the evaluation of the performed activities, play a key role in the acceptance of adaptive systems by teachers in both commercial and research applications, despite the main challenge at the moment being the acceptance of the decision-making stakeholders of the school.
The qualitative analysis with the teachers at the end is an important contribution itself because, unlike many studies that only address the teacher perceptions of social robots, it also addresses technical details and the researchers’ intervention as variables to be considered in long-term studies.
The remainder of this paper is organised as follows. In Section 2, we present the literature that motivated this research. In Section 3, several studies performed with students and teachers are related to understanding how to design and implement an intuitive and autonomous architecture that can be effective for both of them. In Section 4, we show the final result of the designed interfaces for the architecture based on the studies from the previous section. Section 5 presents a qualitative analysis conducted with teachers who have never interacted with social robots before and their impressions of how this tool can foster communication among teachers and researchers for experiments using social robots. Finally, in Section 6, the conclusions and future work are presented.
2 Literature review
Teacher engagement is essential to the development of social robots in educational environments because teachers are more sensitive to practical and ethical concerns, and they know how to approach them with the students (Jones and Castellano, 2018). Although most of the stakeholders in education are aware of the advantages, risks, and implications of social robots (Smakman et al., 2021a), the main challenges concerning teachers and social robots cited in the literature are related to the potential additional workload, which is caused by two main points: time management and technical knowledge (Belpaeme and Tanaka, 2021; Sonderegger et al., 2022).
This phenomenon is not exclusive to HRI in education. It is, indeed, aligned with the barriers that most innovative technologies face to reach classrooms. For example, according to the teachers, some crucial factors hampering the adoption of AI in their activities are lack of time, lack of training, and unfamiliarity with new technologies as well (Kipouros, 2018). A survey of more than 2000 K-12 teachers from four countries (Canada, Singapore, the United Kingdom, and the United States) by Mckinsey & Company reported some critical problems of the current educational system that can be smoothed with efficient technological solutions (Jake et al., 2020). The study claims that areas with the biggest potential for automation are the preparation of activities, administration, evaluation, and feedback. Conversely, actual instruction, engagement, coaching, and advising are more immune to automation. The report also concludes that automation has great potential to save teachers’ time in repetitive tasks, so they can use this time for tasks in which teachers are directly engaging with students, such as behavioural-, social-, and emotional-skill development.
Social robots have the advantage of providing an embodiment device for deploying a practical use of this automation. However, they come with all these already discussed challenges combined with the consequences—mostly complications—of the hardware component (Youssef et al., 2023), not only in the mechanical part but also in the robots’ shape and behaviour. Teachers’ lack of knowledge about social robots can influence the results of research in which their opinions are taken into account, for instance, the difficulty teachers have in understanding and visualising the real scenarios of social robots’ applicability and, thus, providing feedback inconsistent with feasible solutions (van Ewijk et al., 2020). Furthermore, studies measuring teachers’ negative attitudes toward social robots showed that a lack of prior experience with robots was the strongest predictor of negative attitudes, suggesting that increased exposure to social robots in teacher education might be an effective way to improve educator attitudes toward robots (Xia and LeTendre, 2021).
Such implications have a high impact on the research done in educational settings. A literature review showed that, in the last decade, very few studies using social robots have reached out to real classrooms in long-term experiments (Woo et al., 2021). By analysing other studies, this review concluded that most of the reasons are due to the difficulty in deploying autonomous robots in educational settings and the challenges of involving teachers in the loop. Consequently, research on social robots has not been widely published in educational journals compared to other technological methods.
In a qualitative study to further investigate the correlated issues, guidelines were proposed to approach these common difficulties (Ahmad et al., 2016). Among others, the main conclusions of the authors when interviewing eight teachers were: The robot should be able to answer repeatedly asked questions in the classroom; there is a need to design a dialogue-based adaptation mechanism to adapt to the children’s emotions and personality in real-time; robots keeping track of a child’s memory can in-turn motivate children more; and most importantly, designing easy-to-use interfaces for teachers to update new lessons for long-term engagement is key. Related to the last point, in this study, teachers emphasised the importance of their involvement to keep the robot engaged and involved during the learning process for a long time. To do so, it is important to design interfaces that allow them to manage the robots.
Based on the conclusions reported in the literature, it is evident that developing tools and methods to support and enhance teachers’ understanding, familiarisation, and use of social robots is crucial for the widespread adoption of this technology, both in research and commercial applications. Furthermore, few works addressing interfaces for social robots in education have presented an evaluation after putting the design process into operation in the classroom to obtain evaluations from the teachers’ point of view based on the developed tool. Although there has been a great interest in the topic in the last decades, resulting in many reports and qualitative studies on the topic, very few tools have been presented to approach the issue. Providing the advantages of social robots with adaptive behaviours to students and addressing the challenges of including teachers in their end-to-end design is one of the pain points of social robot research in education. This is the bridge that this project was aiming to build by providing a concrete tool resulting from many iterations of field studies.
3 User-centric studies
Throughout the years of the project, many studies were conducted to understand both student and teacher attitudes toward different systems’ functionality. The study outcomes combined with feedback used to guide the module development are presented in the next section. Such studies are important for understanding user preferences because their perceptions depend on different factors, such as culture and technology familiarisation (Kanero et al., 2018; Lim et al., 2021). Therefore, in the current section, the studies previously conducted and their importance to the project are summarised, including the lessons learned and how they were taken into consideration in the final version of the system. It is important to note that, although they have already been published, a deeper analysis of the complete series of studies and how they shaped each component of the architecture is still needed.
3.1 Student expectations toward robot behaviours
First, it was important to understand the aspects that students expect to have present in the robot in the specific context that this system as designed to be used because those expectations may vary according to culture (Šabanović, 2010; Chi et al., 2023). Thus, we deployed a sequence of studies to evaluate these factors, such as the analysis of variation of the robot, as outlined in Table 11. Results from these studies helped to understand the importance of building an autonomous robot that can interact with students through dialogue and vision recognition. Hence, we implemented these systems as explained in Subsections 4.2 and 4.3 for the dialogue and vision systems, respectively. In addition, the findings pointed out that the regional context strongly aligns with results from the literature.
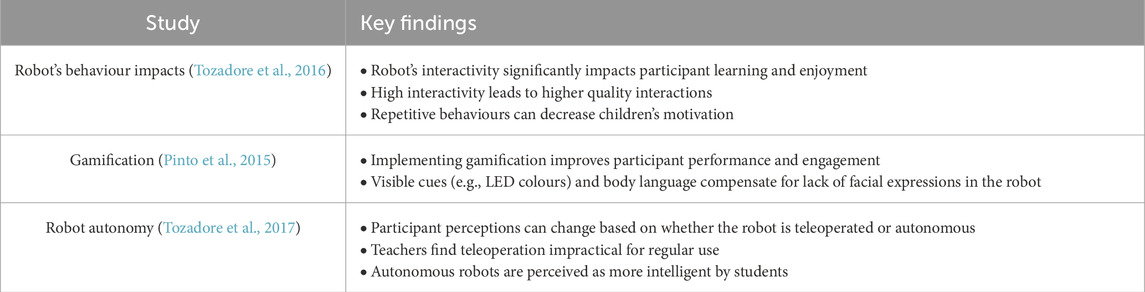
Table 1. Summary of studies with students.
3.2 Co-designing with teachers and end-to-end initial experiments
After drafting the needs of the students, we focused on the main stakeholders in educational contexts: the teachers. In this phase, we showed a group of teachers the outcomes from the experiments with the studies and the initial implementation of the modules in their initial stage to collect their feedback. Afterwards, we performed a two-cycle end-to-end experiment with teachers and students. The results are condensed in Table 2.
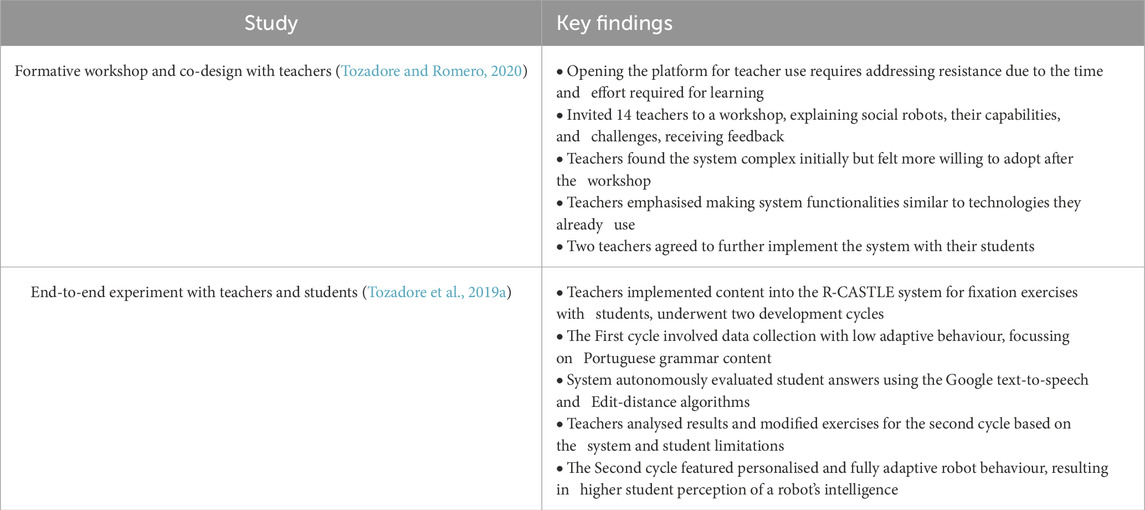
Table 2. Summary of studies focussing on the teachers.
The workshop’s outcomes showed the importance of providing intuitive means for teachers to insert their content when participating in research works. Therefore, we implemented the interfaces of the dialogue (Subsection 4.2) and vision module (Subsection 4.3) to allow customisation. We also drafted the content (Subsection 4.5) and the evaluation (Subsection 4.7) module interfaces.
Regarding personalisation in long-term interventions in children–robot interaction, deploying the system with the students in multiple sessions made two facts evident: adaptation and personalisation are key to student motivation for the next session, and a good strategy to provide the same effect is slowly presenting the robot’s complete interaction repertoire. For instance, when children learn that a humanoid robot can dance, they want to see it immediately, using all its limbs, lights, and speakers. We observed that by making the robot dance using one new resource every time in the next section, it became a novelty, extending the “surprise” elements of the robot to future meetings.
4 Architecture modules and graphical interfaces
Programming a robotic system to achieve cognition involves integrating multiple components that mimic human cognitive processes, such as perception, learning, reasoning, and decision-making (Cangelosi and Asada, 2022). The system must process sensory data through tools like computer vision and speech recognition, represent knowledge through structured formats, and adapt by using machine learning techniques. The system needs logical reasoning to solve problems, a memory structure for storing information, and attention mechanisms to focus on important stimuli. Finally, self-regulation and metacognition allow the system to monitor and adjust its own cognitive processes for autonomous decision-making and error correction. In this section, we present how we programmed our solution to afford cognitive skills based on the feedback received during the interaction design studies presented in Section 3.
A high-level scheme of the resulting architecture is illustrated in Figure 1. Its implementation was based on student, teacher, and researcher feedback, allowing an easier and more intuitive usage of a cognitive system that can adapt to student performance and provide the designers (teachers or researchers) with adapted parameters. A video showing an end-to-end configuration and execution example of the architecture works is publicly available on YouTube2. Externally, the system is designed for use by teachers and students, as shown in Figure 2.
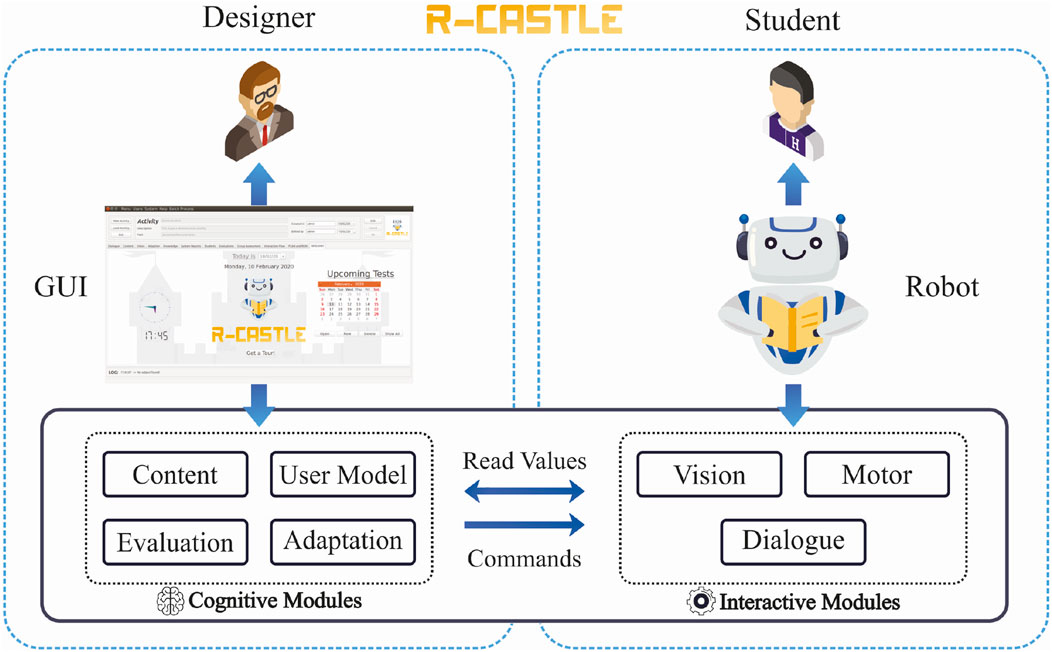
Figure 1. R-CASTLE high-level scheme: how each type of user interacts with the R-CASTLE system. Designers can manage operational and content settings through the GUI, while students interact with the system through a social robot connected to the architecture.

Figure 2. Users of the architecture: teachers inserting content in the interface (left) and students interacting with the robot in the exercise sessions (middle and right).
The figure illustrates that the designers interact with the system through the GUI. As mentioned before, designers can be teachers and researchers. Joint usage is also envisioned, for instance, when planning new activities or discussing study results. The GUI allows them to insert content, set parameters, manipulate data, and evaluate/visualise the results of previous sessions. Students will interact with the system through a social robot connected to the architecture.
Although we used an NAO robot in these studies, other robots that afford social simulation capabilities can be connected to our architecture through the robot operating system (ROS) by implementing publishers and subscribers to communicate the robot’s resources (text-to-speech, speech-to-text, and engine connections), as better detailed in Pinto et al. (2018).
The Interactive Modules (bottom right in Figure 1) were the first ones developed to allow the system to be autonomous. They are the Vision module, responsible for handling the information exchanged via the robot’s cameras; the Dialogue module, responsible for the audio information needed during the interaction; and the Motor module, responsible for connecting different output devices and moving the engines of the connected device. The technical functionalities of these modules were presented in previous work (Tozadore et al., 2019b). In the following subsections, we present how these functionalities were linked to the corresponding graphical elements in the architecture’s final version.
Finally, the Cognitive Modules (bottom left in Figure 1) are the modules developed to afford short and robot long-term adaptation for each student. They are “cognitive” because they have functionalities to process and store data to generate knowledge about the students, contents, and decision-making processes.
The inputs to R-CASTLE come from interactive modules containing information about students and from the designer, specifying the hyperparameters of the system. Thanks to the inputs, the system can adapt itself according to the adaptation function (Equation 1) to attend to the student’s necessities during the interactions, such as getting more attention from the student based on face deviation and emotion recognition and changing the level of the learning process. The R-CASTLE output consists of the robot’s adapted behaviour and auto-generated reports of student performance. Regarding behaviour adaptation, the robot can use more difficult or easier questions or perform more dialogues regarding students’ personal preferences if the system realises signs of disengagement (multiple face deviations, face display of confusion, long times to answer). Due to the growing concern about data privacy and especially because the studies performed are research studies, the database was implemented to be only locally managed to guarantee data privacy without a connection to the internet.
For a more practical understanding of its application, let us take the scenario reported by Tozadore et al. (2019a) as an example, where students interacted with the robot twice to learn about environmental waste. The robot used its sensors to capture student answers and behaviours through image processing and speech recognition (interactive modules), utilised real-time information to adapt its behaviour and adjust question difficulty for each student (adaptive module), and collected data on students’ personal preferences, such as music, food, and sports (User Model module). During the second interaction, the robot leveraged personal and performance data for each student (stored in the User Model and Evaluation modules, respectively) combined with the content provided by teachers (stored in the content module) to enable personalised interactions. As in the first interaction, the robot continuously monitored student responses and displayed behaviours, using the adaptation module to decide whether to trigger personal conversations to regain attention or adjust the difficulty of the questions to offer an appropriate challenge level. As a result, students reported higher self-perception of learning and rated the robot as more intelligent in the second session. The system evaluated student performance in both sessions and generated graphical reports for the teachers (evaluation module), who discussed the results with the researchers. Teacher programming of the content and analysing the student outcomes and student interactions with the system are shown in Figure 2.
The next subsections present the delivered user interface after the studies presented in Section 3.
4.1 GUI
The designed window is the Welcome screen, displayed in Figure 3. It was developed in PyQT53 to easily integrate the other algorithms, and it was also developed in Python. From a user’s view perspective, the window has a fixed top bar that contains the activity summary and the buttons to manipulate activities, and the middle component, with the clock, logo, and calendar, is the tab widget. This widget is dynamic, and changes to the tabs corresponding to each module explained in the next subsections. Therefore, all the screenshots displayed next are widgets that will only change in part of the interface.
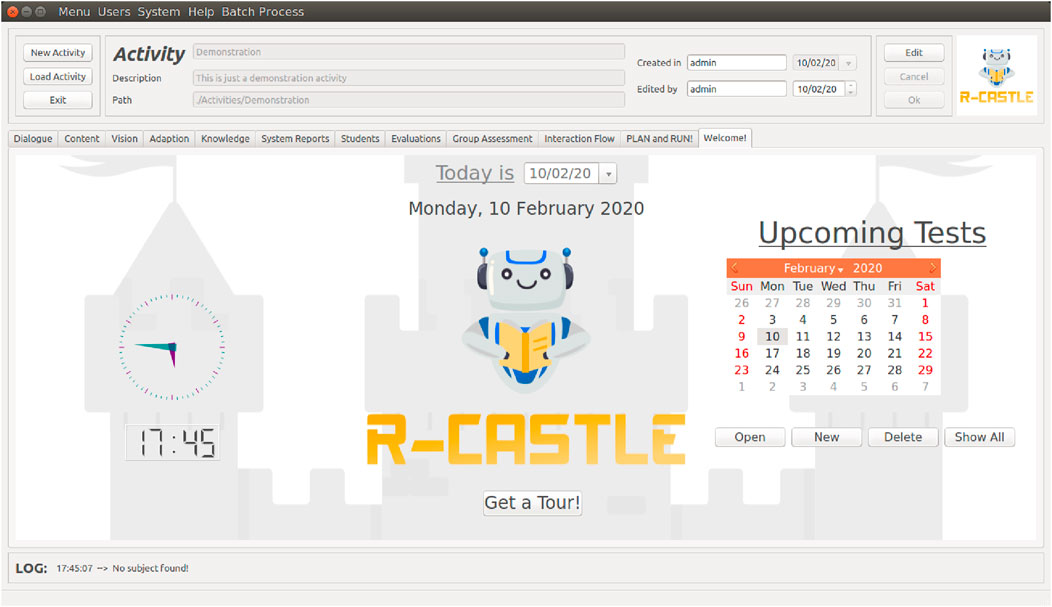
Figure 3. Welcome window of the R-CASTLE architecture. The upper part with the activities and module tab is fixed, while the bottom part (with the castle image on the background) changes according to the selected module.
4.2 Dialogue
The Dialogue tab, shown in the left image of Figure 4, allows designers to set the parameters responsible for keeping the conversations flowing autonomously. Speech recognition and text-to-speech are allowed through Python SpeechRecognition4) library and Softbank Text-to-Speech API5). If any NAO robot is available, the text-to-speech from Aldebaran switches to the Google Text-to-Speech (GTTS) library6. Designers can configure several sound settings through the dialogue window in the GUI, such as volume, speech speed, algorithms for matching the users’ answers with the expected ones, and a similarity threshold to match as a correct answer. Robot speeches can also be built in the dialogue tab. They could be any other information the system wants to exchange that is not related to the content. User interests can be allowed along with the utterance, for example, talking about the preferred music of the current user. The speeches are saved in files and later chosen based on which part of the interaction they will appear in the Interaction Flow tab. It also takes into account the keywords that the designer inserts: affirmation, negation, and doubt. The keywords affirmation and negation are used in cases in which the system asks a regular question to the students and expects a binary answer of yes or no. Then, all the words filled in the corresponding group will fit. Keywords of doubt are analysed in every user’s answers. If a high frequency of these words is detected, the system can start to repeat the questions, lower the speech speed, or send a message to the adaptive system to lower the difficulty of the questions. The sentence-matching algorithm evaluates the correctness level of the user’s answers based on the expected answers registered by the designers. To date, no large language models (LLMs) have been trained or implemented in the architecture; this is a potential follow-up point.
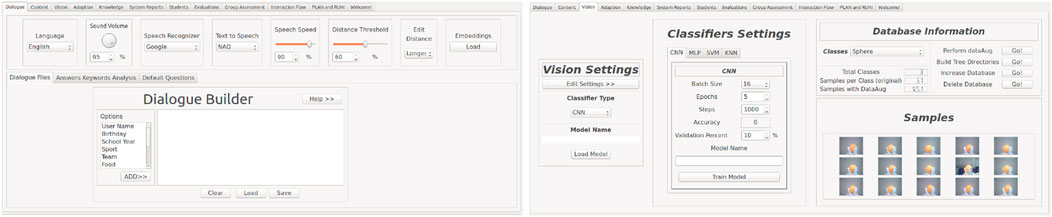
Figure 4. Dialogue module tab (left picture): Designers can set the parameters, build personalised dialogue, and set keywords for positive, negative, and dubious student answers. Vision module tab (right picture). Settings of the type of classification algorithm, models, and dataset are available through this module’s interface.
4.3 Vision
As a primary responsibility, the vision system manages the device’s camera and recognition algorithms. Second, it also sends information to the modules that will process this information. Images of user faces, for example, are sent to the User Model system, whereas the information on the users’ facial expressions, such as emotion and face gaze, are used by the Adaptation module.
For the image recognition in the tasks, designers can use the Vision module tab, as shown in the right image of Figure 4, to choose which one will be used in the next session and change their parameters before training in the algorithm settings section. Machine learning methods are available, such as multi-layer perceptron (MLP) networks, K-nearest neighbour (KNN), support vector machines (SVM), and convolutional neural networks (CNNs). More details about the advantages and setbacks of using these methods can be found in Tozadore and Romero (2017).
The system uses the Python face recognition module for user recognition.7 The Haar Cascade Viola and Jones (2001) algorithm, implemented in the OpenCV library, is used for face gaze detection, as described in (Tozadore et al., 2019b). Finally, emotion recognition through facial expression is the result of a study where seven emotional states of Ekman’s model, such as happiness, anger, sadness, fear, disgust, and surprise, plus the neutral emotion, were trained to be detected by a CNN (Tozadore D. et al., 2018).
4.4 Adaptive
The Adaptive module aims to change the robot’s behaviour and the difficulty level of the approaching content based on the observed student indicators, which are expressed by their body language and verbal answers.
These indicators were divided into three major user skills. They are Attention
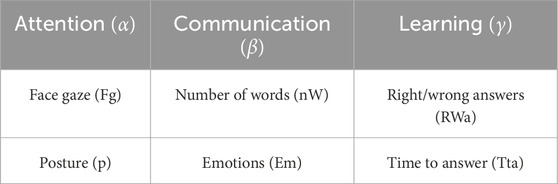
Table 3. Objective measures by group.
In this way, the abstract resulting functions with the corresponding vectors are represented as
The function outputs will have two utilisations: be saved and sent to the Assessment Module to produce the reports (to the designers about the interactions with the users) and to be used as input for the adaptive behaviour function.
Regarding the adaptation algorithms, there are three implemented methods for the adaptation calculation: rule-based (Tozadore D. C. et al., 2018), fuzzy systems (Tozadore and Romero, 2021), or supervised machine learning algorithms. Whereas the first two methods required parametrisation inputs of the designer and should be input through the interface, machine learning techniques should be hardcoded due to the expertise required in data handling and code development. In the interface of the adaptation module, the designers can set the parameters and the methods on the fly according to each activity, as shown in Figure 5.
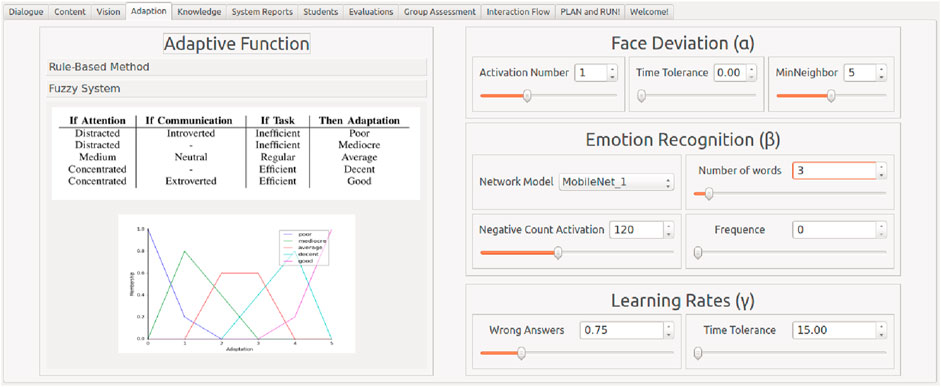
Figure 5. Adaptive module tab. Designers can choose between the methods on the left part and set their parameters on the right side of the screen.
4.5 Content
The GUI makes content insertion easy for teachers. The content is stored in the system database, and it can be approached in any late activity.
The content is approached in topics (Subjects, in Figure 6). Each topic is an entry in the Content module that has a concept (an explanation of the topic from which the questions will be derived) and many questions.
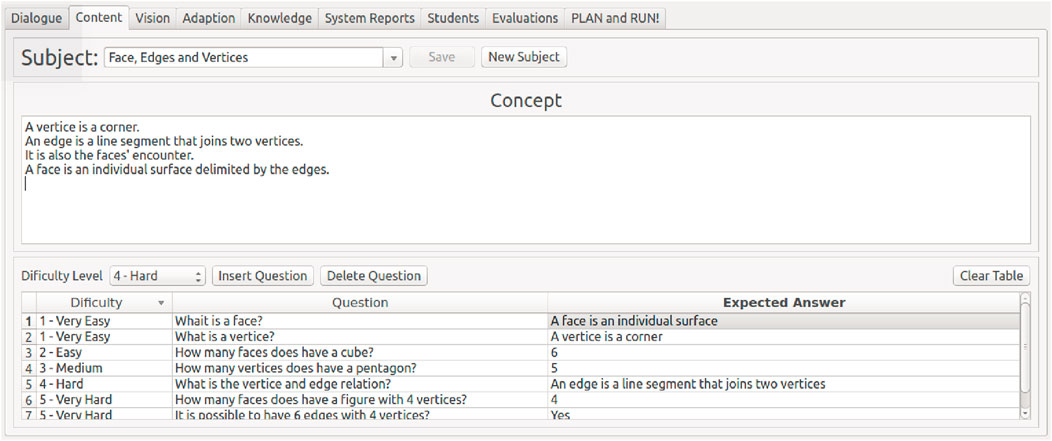
Figure 6. Content module tab. Designers can set all the topics they want to approach. The explanation of the topic goes in the “Concept” field, and questions are inserted in the table below it with their respective expected answers and difficulty levels.
For instance, if the activity is about animals, one can create a topic for each class, such as mammals, fishes, insects, and so on, and their concept would be the features that make them belong to this class, followed by their corresponding questions. An activity can have as many topics as needed and as many questions as needed. The designer should fill the concept text box, which is the utterance the robot speaks before starting the questions regarding the current topic. After that, the designer should insert at least one question of each level of difficulty followed by the corresponding expected answer. The pedagogic model of this proposal—the interaction of the student and the system conducted by the robot during the content approach—works like a quiz mode. It means that in each step, the robot gives explanations and asks questions about a topic that was inserted in the content module by the teachers.
Once the system has the capabilities of both speech and image recognition, the expected answers can be a sentence or an image. In the case of a sentence, the system analyses the answer by the dialogue system, as shown in Subsection 4.2. On the other hand, the answers that are expected as images are classified by the Vision module, as shown in Subsection 4.3 and also in Tozadore and Romero (2017). For instance, in the question “What is the 3D geometric figure that has no vertices and edges?” the answer could be verbally accepted as “A ball” or by reading the camera’s image in which the student would be showing a ball (as long as the designer set the question to be answered in this way).
4.6 User model
The User Model, or Student Model module, stores information about every student who interacted with the robot. The information includes their first name, family name, age, school year, birthday, user pictures, and eight user interests in sports, dance, teams, music, toys, hobbies, games, and food. This data can be autonomously collected or manually inserted through the user interface tab, as shown in Figure 7. All the data are stored in the user database, and the definitions of these interests are stored in the system’s knowledge database. Designers can perform transactions in the database manually in the corresponding window. Student interests can be used in small talk at the time that it was previously set or autonomously when a high frequency of bad readings (a high no-attention level or a high number of wrong answers) is detected by the system. This module’s features were highlighted in experiments within this project, as well as pointed out in other works in literature (Pashevich, 2022). More details about this module can be seen in Tozadore D. C. et al. (2018).
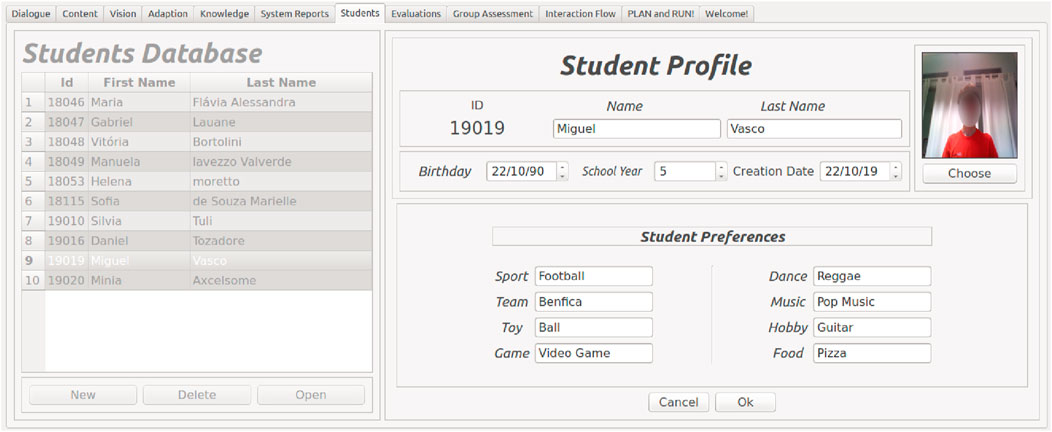
Figure 7. User database interface. The system stores users’ personal information (if needed) and topics to discuss, such as favourite music and food.
4.7 Evaluation
The Evaluation module reports the performances of both the system and students to the designers. For each activity, the teacher can access different graphs about the system assessment of each student or the whole class report. Another functionality is that the system can report on the performance of R-CASTLE in terms of the machine learning algorithms’ accuracy based on manual validation.
The evaluation module first presents an index of all the previously performed activities (Figure 8A). After selecting a session, it presents a human validation tab (Figure 8B), which allows designers to correct potential mistakes performed by the system’s autonomous evaluation.
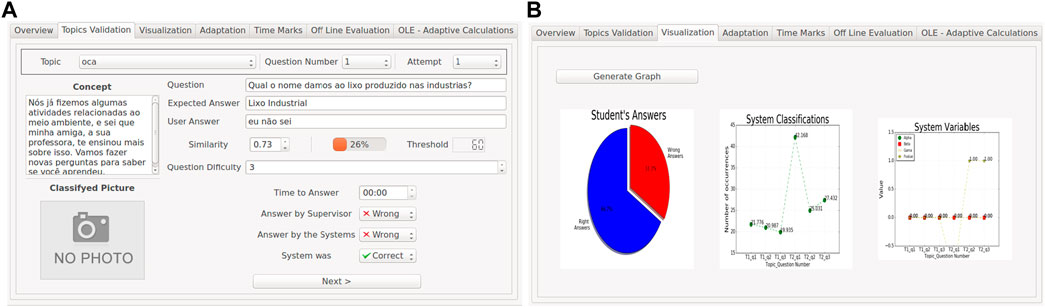
Figure 8. Validation (A) and visualisation (B) window of the evaluation module. Designers have to validate the outcomes of the autonomous algorithm (left picture) and the system and student’s performance are available for checking (right picture).
The Evaluations tab shows the session’s information about the last sessions performed. It displays the user recognised by the system in this session, the configurations that the session was run, the user accuracy assessed by the system, the time the session started and ended, the designer, the robot or interactive device used, and extra observations that the person who executed the activities wanted to add. Another highlighted feature of the Evaluation module is the human validation of each system classification of the students’ answers through the GUI. This validation checks the performance of R-CASTLE’s algorithms in classifying the answers. After validating all the questions, graphs of both student and algorithm performances are shown. User performance is related to how many correct answers they gave based on the expected ones, while the performance of R-CASTLE is evaluated based on how many answers it classified correctly based on the human validation after the sessions.
The measures available for showing in these graphs are the observed values from the users; their corresponding skill values of Attention
Recorded videos made by the frontal camera of the robot are available to be watched later and used to retrain the classification algorithms. They are accessible in the “Time Mark” sub-tab of each evaluation. Every video has the time mark of the beginning of each question, and the person watching can jump to these specific moments. With the videos and the verbal answers stored, the sessions are available for as many reassessments as wanted in the tab “Off-Line Evaluation.” In this way, all the algorithms of students’ readings and classification can be evaluated with different parameters. The result of each algorithm configuration with the new parameters, weights, and tolerances are stored and available to be used in the adaptation methods at any time in the “Off-Line Evaluation (OLE) — Adaptive” tab (Figure 9). The results of new methods and configurations are shown in graphs immediately after the OLE end.
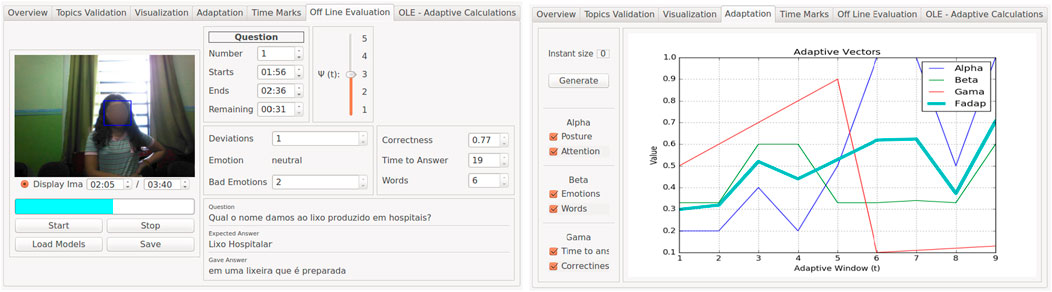
Figure 9. Off-line evaluation (OLE) tabs. Designers can use recorded videos to validate new parameters or completely new algorithms (left picture), and the outcomes of the new performance are shown in the graph (right picture).
Therefore, beyond the functionality of keeping teachers aware of the student’s performance through evaluation graphics, the Evaluation module works as a laboratory to retest and maintain the machine learning methods at a high performance level. This module also fostered discussions between teachers and researchers regarding the outcomes of the studies performed using the architecture.
4.8 Researchers’ considerations and project limitations
The developed interfaces aimed to create an understandable layer between the software implemented and its interaction with the students through the robot. Although there are some windows that teachers do not feel comfortable using alone (for instance, the Vision module due to all the parameters to set), all the windows are important to promote explainability to them about how the system operates and to leverage the discussions about the experiments. Although the system was seen as a potential product to be later launched on the market, there is still a wide margin for improvement in the user experience part.
The fast in-loco configuration of new parameters for different activities and modularisation of the architecture allowed for rapid adjustment of the algorithms between studies and saved much researcher time. These features facilitated different studies to be modified and performed in a shorter term than the traditional operation of hardcoding. However, systematic tests are still required to validate how much time these approaches could spare from experimenters. They were planned to be performed at the end of this project but were aborted due to the COVID-19 pandemic. Therefore, the limitations of this project include the lack of more sessions for validation because final user studies did not take place due to the social distancing measures of the COVID-19 pandemic at the end of this project. A large-scale validation regarding how the proposed framework can benefit the researcher-teacher communication is still a topic worth further investigation with quantitative analysis because it was only done with a qualitative analysis, as presented in the next section (Section 5), for the same reasons as the studies were interrupted.
5 Usability test through qualitative analysis
To validate our proposal from the teachers’ perspective, we qualitatively analysed the data collected in interviews performed with five teachers who did not participate in the architecture development. The recruitment was done by sending an invitation to social media groups of teachers, and the first teachers to subscribe to the project were accepted if they fit the inclusion criteria. The inclusion criterion was teachers of elementary school who have more than 5 years of experience in classrooms, regardless of the use of technology they have in their classroom or their familiarisation with the topic. To preserve participants’ unbiased opinions, the final goal of the interviews (checking their perception of adaptive methods for social robots in the classroom) was not mentioned in the call for participation. Instead, the announcement only informed teachers that they would participate in a 60-minute conversation about technology in classrooms.
5.1 Participants
Registered participants8 were five teachers (named here T1 to T5) of elementary schools in different cities of the state of São Paulo, in Brazil, with an average age of 43.6 years (SD 9.39) and 24 (SD 8.86) years of experience in classrooms. To preserve their identities, we provide their profiles that can be useful to understand their opinion. The first participant (T1) was a retired teacher working with children approximately 6 years old in public schools only for more than 35 years until 2019. The second and fourth participants (T2 and T4) had similar profiles. They had only worked in the same private school, which both of them described as “Very motivated to adopt high-tech and innovative solutions for education.” Finally, the third and fifth participants (T3 and T5) were teachers who had worked in both private and public schools. They were asked to give their feedback based on both scenarios but to make their situation clear in their responses.
5.2 Methodology and structure
We used semi-structured interviews, a standardised method in which the experimenter has a set of pre-defined questions that guide the conversation toward key points the experimenter wants to investigate (Veling and McGinn, 2021). In the questions, we adapted versions of Perceived Ease of Use (Saari et al., 2022), Attitudes and Acceptance (Naneva et al., 2020), and Intention of Adoption (Louie et al., 2021) to be suitable for our research questions. Interviews were conducted via Zoom to facilitate the recording, transcription, and data analysis, as well as to support social distancing. Although most of the data were structured for objective measures, two researchers analysed the videos and the scripts, checking the conclusions we can draw from teacher opinions, following a simplified version of the work done by Ceha et al. (2022), where we used thematic analysis using the coding present in Appendix Table A1 in the Appendix. However, because we wanted to explore the different ideas to be used in creating activities with the interface, we did not provide any background scenarios to teachers. We rather asked them about their current activities and how they would adapt them to the interface.
We divided the interviews into three phases. In the first, we asked exploratory questions about the teacher’s profiles and opinions on social robots based on what they already know. In the second, we focused our investigation on social robots (in general) and their implications based on the definitions we set. Finally, in the third, we presented the R-CASTLE and performed a user validation with them. Throughout all the phases, we first asked for participant opinions in open questions and then triggered further focused discussions with alternative questions.
5.3 Results
5.3.1 Exploratory phase
In the first phase, we asked several questions to understand the teachers’ a priori point of view about technology and social robots. First, we inquired about their familiarisation (or frequency of usage) with existing devices: smartphones, tablets, computers, robots, social robots, software with artificial intelligence, and other devices they would like to mention. The familiarisation was based on three criteria: Their personal use, the use of these devices as regular activities in their class time, and their use for extra-class activities/homework. A 5-point Likert scale was used for this question, where the items were: 0-“I’ve never used it/I don’t know anything about it”; 1-“I know what it is, but I never used”; 2-“I use it, but with a lot of difficulties that interfere [with] its utilisation; 3-“I use it, but with some difficulties that occasionally prevent me of doing what I wanted”; and finally, 4-“I use it and the difficulties I have very rarely prevent me from doing what I want.”
At this point, when asked about social robots, all the participants asked some form of “What do you mean by social robots?“ They were informed that they should follow the definition that came to mind and that we would come back at this point later.
The results of the teachers’ familiarisation are illustrated in Figure 10.
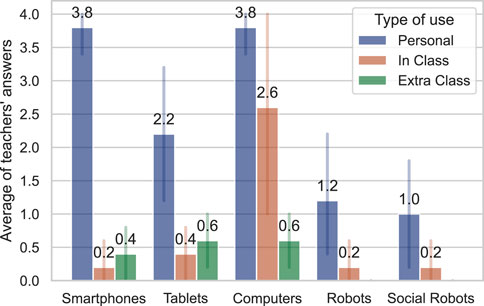
Figure 10. Teacher familiarity with different technologies.
Results showed that teachers are very familiar with smartphones, computers, and tablets, using them very often for personal use and always as possible in their classes (in private school contexts, not in public ones).
The interview proceeded by asking what they thought about social robots when answering the questions and what they thought a social robot was.
Teacher opinions were convergent to some kind of personal assistant, like Alexa or Siri. What was the assumption that led T3 to answer that she uses social robots in her daily life and activities (fourth and fifth questions in Figure 10)? Only one teacher (T2) gave an answer related to physical embodiment, associating social robots with domestic cleaning robots. The other four teachers presented a concept relating the entity of social robots to personal assistants, where two teachers explicitly cited Amazon Alexa (they said they have it in their homes). In all these four later answers, the words “interaction” and “ human” were contained in their answer.
Not surprisingly, participants gave ideas about the robot’s use according to their definition, where T2 said they could be used to teach programming skills (assuming social robots are cleaning robots), and the others said the robot could assist teachers and students as a personal guide. Additionally, T1 added that the robot has the advantage of providing more media resources than already-used devices (tables and computers), and T4 said she thought this type of assistant could help her grade activities.
In contrast to research done previously on the popularisation of domestic robots (whether interactive or not), where teachers did not have a clear idea about robots and interactive devices (Serholt et al., 2014), the teachers gave definitions close to the one we are using in this survey.
We then asked: Based on your conception, how do you envision their utilisation in your activities? We asked them to think about their current activities and present examples whenever possible. Most teachers associated activities afforded by personal assistants, such as the robot being a personal tutor to each student (T1 and T4) and collecting data from the students autonomously for teacher evaluations (T3). T5 envisioned a different role for the robot, where it would also assist the teachers to prepare their content. T2, however, claimed that social robots (in her conception of cleaning robots) would not be useful in her activities at this point. Interestingly, all these features can be achieved using R-CASTLE, as discussed in Section 5.3.3.
5.3.2 Teacher opinions after our definitions and explanations
Having finished the exploratory phase, which lasted approximately 10–15 min on average, we defined the term “social robots” and presented videos of social robots to teachers so the teachers could see the robots in action. We used the definition presented by Sunny et al. (2023): “A social robot is an autonomous robot that can connect and communicate with humans and other social robots by adhering to the social behaviours and rules associated with its role in a group.” Afterwards, we showed videos about social robots9.
Then, we asked questions to foster teacher opinions based on the definition we gave them, and they envisioned using these robots in their teaching activities with this new horizon. The result is presented in Table 4.
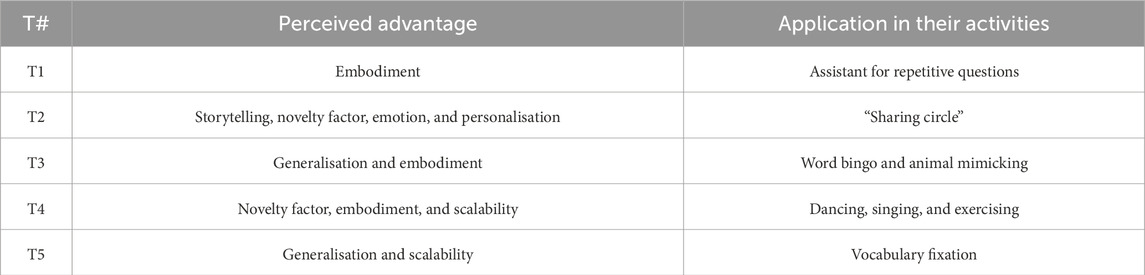
Table 4. Teachers' answers clustered by the adopted codes.
T2 corrected her understanding of social robots and found applications for social robots more quickly than the other participants. She was also amazed she could use them to spare her resources. “Oh, I would love using them […], and I can find a lot of applications. As a teacher, I have always my voice very tired, and using them to sing or repeat some information would really help me physically.”
An important observation was that every teacher commented on aspects of generalisation for the tasks and personalisation for the students. Whereas they realised that the robots have the potential to collaborate in diverse activities, they also realised the feature of affording personalisation to each student.
For the teachers in the context we expected regarding social robots and giving examples of their utilisation, we asked for the challenges and barriers they see for the social robots popularisation in open question. We clustered their answers according to the codes presented in Table 5.

Table 5. Teachers mentioned the main challenges according to the coding scheme.
When asked if they were aware of scientific studies done in the field, all participants but T4 claimed they did not think there are many, especially in the Brazilian context. The reasons they mentioned were the same as reported in Table 5, and they added that research is not profitable for their institutions. Thus, it is not a primary interest of the schools.
On the other hand, T4 said, “Yes, I think there is a lot of research going on because it is a growing area [social robots], but we are not noticed because, for the media, it is more interesting reporting other things.”
At some point, all the interviewees mentioned the practical challenges that social robots face before becoming part of their regular teaching toolkit, such as the high financial cost (Pachidis et al., 2019), teachers’ lack of technological knowledge to deal with these robots (van Ewijk et al., 2020), how learning new methodologies, specially such a complex one, had an impact on their time management (Sonderegger et al., 2022), and how administrative layers of their school and children’s parents’ acceptance play a role in the adoption of social robots (Smakman et al., 2021b).
Based on studies found in the literature, we brought together the main pain points that prevent social robots from being used as a regular tool in daily class activities. We presented these points to the participants and asked teachers to give weights to the challenges in two conditions: one considering they would participate in scientific study (research) and the other if they were to use this kind of technology as a regular tool for teaching. The results are shown in Figure 1110.
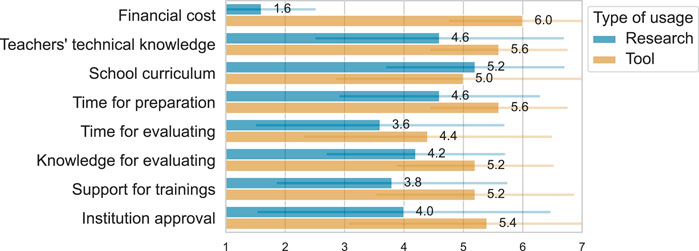
Figure 11. Teachers' opinions on a 7-point Likert scale regarding the barriers to using social robots in classrooms. In blue, considering they would participate in research, and in yellow, if they have to use it on their own as a regular tool.
Participants gave more weight to the financial factor, assuming they were to use the robots as a regular tool, followed by the technological knowledge they assumed they would need and the extra time they would have to allocate for preparing the activities. The cost of using a robot as a research artefact would be less impactful, but the factors of not being part of the regular curriculum of the school and, again, teacher knowledge play a substantial role in this condition. For both conditions, the teachers gave less weight to the impact of evaluating student performance because they claimed it would be easy to simply transfer their regular evaluations to the new approach.
5.3.3 R-CASTLE user validation
Finally, the discussion focused specifically on R-CASTLE. We started by showing the demo video (the same as in Section 4) and asking participants for their perception of the interface, which activities they thought they would be able to program using the interface, and the functionalities (windows) they thought they would use the most.
The responses highlighted various aspects such as motivation for children, adaptation to different learning styles, facilitating teachers’ work through automation, and enhancing interaction in the classroom. There was also a mention of the importance of adaptation for creating bonds, particularly in cases like autism, and the potential for robots to engage students who may not interact as much with peers or teachers. Overall, the responses suggest a recognition of the multifaceted impact that technology can have on education, from enhancing engagement to streamlining processes.
Regarding the challenges, all participants revealed that they still think it is more complex than they are used to; however, it was easier than they thought it would be. T2 and T4 (from the same school) said they are already using similar technology in their classes, a mathematics tutor that they had to load with different levels of content.
Diverse types of answers were given with regard to their preference for the functionalities. T1 claimed she would really like to explore all of them through their windows, T2 manifested high interest in the content insertion, T3 mentioned the evaluation, T4 voted for the studies scheduling system, and T5 liked the adaptation module.
Participants were requested to give examples of a daily activity they performed with their students to insert in the R-CASTLE. Without further prompting, they reported that they would be able to apply all the activities they mentioned before using R-CASTLE. When asked to choose one, T1 chose cooking classes, T2 chose vocabulary naming (bilingual classes), T3 chose fixation exercises of language, T4 said activities with autistic students (now that they are integrated into regular classrooms), and T5 said conversation circles.
Inspired by the evaluation we performed with teachers, which helped us to design the architecture, we asked teachers quantitative items about their perception of the architecture, in items regarding: (1) How easily do you think you could create your activities using this interface? (2) How easily do you think you could evaluate student performance with this system? (3) How do you judge the system’s potential as a product to be consolidated on the market? (4) How efficient do you think this methodology is for content addressing? (5) How long would you estimate it would take to familiarise yourself with this interface? (6) How efficient do you think this methodology is compared to the traditional one (that you already use)? (7) How much do you estimate your school’s intention to buy if it was available as a commercial product? (8) How much do you think R-CASTLE can foster more research studies of this kind in education?
The results, illustrated in Figure 12, showed that teachers have positive attitudes toward all the asked aspects, including the time to familiarise, where the lower the score (low time to familiarise), the better. The point where teachers hesitated the most was related to creating an activity, with an average score of 3.6. They verbalised that they believed they would have difficulties understanding how the windows work at first, but within a few days of using it, they would be able to take full advantage of the system.
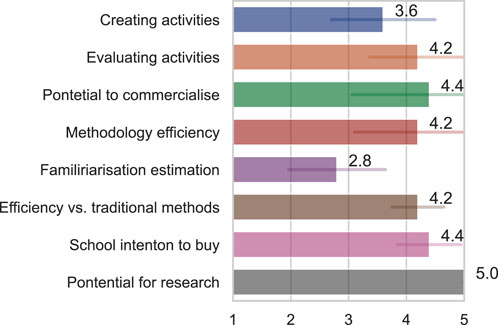
Figure 12. Teachers' perceptions of the architecture interface.
The participant teachers possessed a high understanding of the contributions of the proposed architecture to the research in their classrooms, where all the teachers gave a maximum (5) score to this question.
5.3.3.1 What makes a teacher–researcher collaboration successful?
The last question in the item led to the final discussion with the teachers. After giving their answer to the point related to the research question, we further investigated their opinion about it by asking: “what are the important points that make research in SARs efficient in their classroom and how to foster them?”
The key point to the teachers was presenting efficient communication with respect to the goals and benefits of the research. T1 emphasised: “Researchers must know the reality [in the classrooms] to understand what can be offered by [their] research.” T2 added a perspective from the teachers’ side, “ […] there must be an interest from our part. A sort of motivation to learn something new.”
Related to the research artefacts, T5 added: “A demonstration of method effectiveness is required, as well as showing teachers that the robot is an ally, especially when convincing parents and school directors. It that depended only on myself, I would allow research in my classroom only if I am convinced it will bring a good time for my children.” She concluded that the automatic reports of the evaluation module are a powerful means of intuitively providing this validation.
5.4 Discussion
5.4.1 Teacher feedback
Not surprisingly, the challenges the teachers face in the given southeast Brazilian context are well aligned with the literature. Although financial costs are pointed out as the main issue to consolidate the popularisation of SARs in non-scientific activities, the second and third most critical issues, according to the teachers (Teachers’ lack of technical knowledge and Time for preparing activities) can benefit from the advantages of our solution.
When asked which kind of activities they would use the R-CASTLE, all teachers said they consider themselves able to use the architecture for all their activities. Although long-term experiments to validate this hypothesis are required, this unanimous answer suggests a high level of intuitiveness of our proposal.
Public school teachers claimed that the main barrier is the lack of investment in such technologies. In private schools, the main issue is to convince parents and directors about the efficiency of using SARs. Regarding the differences between using SARs as a regular tool or using them as part of research, the critical points present a small variation between these two conditions, except for, of course, the financial cost. As a solution, the fact that the architecture was developed in modules afforded tests using low-cost social robots. In an experiment (Pinto et al., 2018), the performance of the autonomous methods was kept the same when using state-of-art and low-cost robots. Similarly, users reported enjoyment, and their performance did not present significant variance between conditions. This suggests a valuable alternative to approach the problem of using high-cost SARs by simply adapting the architecture features to other devices with the same performance.
The fact that all the interviewed teachers reported that R-CASTLE could smooth all the critical factors we presented to them leads to a consequent hypothesis that this strategy is a potential solution to minimise issues related to teacher skills when using SARs.
Furthermore, the fact that participants in this final validation raised the same critical points the architecture aims to cover (based on the feedback of teachers who participated in the design phase) before knowing about our proposal shows consistency in the issues being approached. The fast finding of solutions using the architecture’s functionality suggests a high potential for this alternative and fast familiarisation time.
5.4.2 Main takeaways
Very often, researchers underestimate the extra time needed to invest in communication with teachers and school staff while doing experiments with social robots. In contrast with other technologies that are better consolidated, for example, tablets, SARs have the distinction of counting on extra levels of complexity, namely a more extensive hardware, a different outcome in children’s expectation due to their social aspect, etc. These particularities can be a point of friction for schools, where administrators need to understand the technology better before being compliant in the use of such technologies either for research studies or as a tool for their teachers. As a more concrete example in this paper, three of five teachers pointed out in this interview that providing the teachers with devoted time to explain these factors and the implications of SARs is key to achieving success in research deployed to classrooms. This clarification speaks not only to outcomes but also to the impacts it may have on teachers’ time, planning, and cognitive load. Although the R-CASTLE itself cannot provide such explanations, the teachers noticed it was a powerful means of encapsulating technical settings and illustrating student and system performances.
Related to the strategy for the final validation, the employed interview scheme of gradually presenting the elements of investigation, being the problems, the methodology, the tools, the main goals of the research, and, finally, the artefact of investigation, have helped the participants better understand the concepts and goals of each question. Similarly, the aggregated information from previous sections has supported teachers in building their own critical thinking and chain of thoughts. Hence, we postulate that exposing participants to this process in the final user validation generated a more formulated and reacher to analyse feedback, compared to outcomes of the validation in the design phase, in which we presented the solution instantaneously.
5.4.3 Limitations
We acknowledge several limitations of this work. First, it was performed with a small sample size of teachers from the same region of Brazil: São Paulo. Therefore, the discussions were based on the school practices in this area. Additionally, the teachers had no experience with (social) robots and were not exposed physically to the system or the robots, which may have influenced the results. However, time limitations from the teachers and experimenters led the works approaching the same theme being published over the last decades to have similar small samples of participants (Chang et al., 2010; Serholt et al., 2014; Ahmad et al., 2016; Ceha et al., 2022; Tozadore et al., 2023). Then, our focus with this qualitative analysis lies not in making broad generalisations across populations but rather in providing a detailed portrayal of the sociotechnical context being studied. Additionally, logistical constraints prevented us from implementing the robot in classrooms due to teacher availability. Consequently, while teachers have shown strong positive attitudes toward the architecture, the long-term implications of employing the proposed solution remain unexplored and could contradict what they claimed in their first impression.
6 Conclusion
R-CASTLE is a system developed for the educational domain. It is a system that students and teachers can interact with in different ways. Students can learn concepts about diverse subjects and do exercises provided by R-CASTLE, interacting with a robot and the system at the necessary difficulty level for students to improve their scores. Teachers can insert exercises that approach the concepts to be learned by the students more easily without having much knowledge about computer issues. This paper investigated how researchers and teachers can use the R-CASTLE in long-term experiments and how and what design decisions in our architecture helped them in human–robot interaction activities.
In its first phase of development, results from the experiments with students helped to understand the importance of building an autonomous robot that can interact with students through the dialogue and vision modules because these characteristics increased users’ perception of the robot. On the other hand, experiments with teachers showed the importance of presenting the goals and results of the interventions at each phase of the study, which is remarkably enhanced through visual support.
We implemented another round of enhancements based on the results and feedback from these experiments. The implementation of the architecture in modules allowed gathering several algorithms for its use, which makes it easier to adapt the architecture to any solution, whereas the R-CASTLE interface provided faster configuration of the algorithm parameters, the content of the activities, the interaction flow, and the activity outcome analyses.
Once these features were implemented in the R-CASTLE, we performed a qualitative analysis with teachers who did not participate in the design phase (first phase) to check consistency. We took the opportunity to explore open issues of socially assistive robotics in education in the specific context where the architecture was developed. Without knowing about our research, teachers reported having difficulties with the same problems that our approach targets. After we explained our goals, they could intuitively link the architecture’s functionalities to their daily tasks. The interface had the approval of all participant teachers, who reported a very high intention to adopt and a low estimation of time to get used to the system. However, large-scale studies are needed to quantitatively assess this proposal’s potential related to the communication enhancement between researchers and teachers, as well as the researcher of social robots, in long-term experiments in real classrooms.
Finally, the system's modularity affords follow-up studies in many directions for applying machine learning algorithms. For instance, the growing number of studies using large language models would benefit from deploying their algorithms in the dialogue module and analysing the different outcomes of autonomous dialogues. Furthermore, although we limited the applications of this architecture to the educational domain, we believe it can be easily adapted and used in other areas in which there are stakeholders involved in the look, for instance, in the healthcare area, where therapists use the robot in multiple sessions with their patients.
Data availability statement
The raw data supporting the conclusions of this article will be made available by the authors, without undue reservation.
Ethics statement
The studies involving humans were approved by Plataforma Brasil: Base nacional e unificada de registros de pesquisas envolvendo seres humanos para todo o sistema CEP/Conep. The studies were conducted in accordance with the local legislation and institutional requirements. The participants provided their written informed consent to participate in this study.
Author contributions
DT: conceptualization, data curation, formal analysis, funding acquisition, investigation, methodology, resources, software, validation, visualization, writing–original draft, and writing–review and editing. RR: conceptualization, data curation, funding acquisition, project administration, resources, formal supervision, writing–review and editing.
Funding
The author(s) declare that financial support was received for the research, authorship, and/or publication of this article. This work was partially funded by the Coordenação de Aperfeiçoamento de Pessoal de Nível Superior – Brasil (CAPES) – Finance Code 001, the Fundação de Amparo á Pesquisa do Estado de São Paulo (FAPESP), the Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq), and the EPFL internal grants: Proposal 24866/External grant: 10339. Open access funding by Swiss Federal Institute of Technology in Lausanne (EPFL).
Acknowledgments
We acknowledge all the students, teachers, and researchers who participated in this project, specially the 5 teachers of the last qualitative analysis, (HT, PP, RS, LG, and JC) for their precious time and valuable feedback.
We acknowledge we used generative AI, the model chatGPT 3.5, for grammar correction and for table coding and formatting.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Footnotes
1Please note that the studies are presented in the chronological order they were conducted rather than the order they were published.
2https://www.youtube.com/watch?v=GlNj98L1Mrc
3https://pypi.org/project/PyQt5/
4https://pypi.org/project/SpeechRecognition/Accessed in December 2023.
5http://doc.aldebaran.com/2-1/naoqi/audio/altexttospeech-tuto.html Accessed in December 2023.
6https://pypi.org/project/gTTS/Accessed in December 2023.
7https://github.com/ageitgey/face_recognition Accessed on December 2023.
8This experiment was approved under protocol number 72203717.9.0000.5561 by the Brazilian Ethics Board.
9https://youtu.be/j23qqcDGUrE?si=NxnApWQ_BBTIukt_&t=171
10A complete description of these factors is presented in Appendix Table A1 in the appendix.
References
Abdelrahman, A. A., Strazdas, D., Khalifa, A., Hintz, J., Hempel, T., and Al-Hamadi, A. (2022). Multimodal engagement prediction in multiperson human–robot interaction. IEEE Access 10, 61980–61991. doi:10.1109/ACCESS.2022.3182469
Ahmad, M. I., Mubin, O., and Orlando, J. (2016). “Understanding behaviours and roles for social and adaptive robots in education: teacher’s perspective,” in Proceedings of the fourth international conference on human agent interaction. Editor W. Y. Yau (Association for Computing Machinery), 297–304.
Alam, A. (2022). Social robots in education for long-term human-robot interaction: socially supportive behaviour of robotic tutor for creating robo-tangible learning environment in a guided discovery learning interaction. ECS Trans. 107, 12389–12403. doi:10.1149/10701.12389ecst
Arnold, A., Cafer, A., Green, J., Haines, S., Mann, G., and Rosenthal, M. (2021). Perspective: promoting and fostering multidisciplinary research in universities. Res. Policy 50, 104334. doi:10.1016/j.respol.2021.104334
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., and Tanaka, F. (2018). Social robots for education: a review. Sci. Robotics 3, eaat5954. doi:10.1126/scirobotics.aat5954
Belpaeme, T., and Tanaka, F. (2021). “Social robots as educators,” in OECD digital education outlook 2021 pushing the frontiers with artificial intelligence, blockchain and robots: pushing the frontiers with artificial intelligence, blockchain and robots (Paris: OECD Publishing), 143.
Ceha, J., Law, E., Kulić, D., Oudeyer, P.-Y., and Roy, D. (2022). Identifying functions and behaviours of social robots for in-class learning activities: teachers’ perspective. Int. J. Soc. Robotics 14, 747–761. doi:10.1007/s12369-021-00820-7
Chang, C.-W., Lee, J.-H., Chao, P.-Y., Wang, C.-Y., and Chen, G.-D. (2010). Exploring the possibility of using humanoid robots as instructional tools for teaching a second language in primary school. J. Educ. Technol. and Soc. 13, 13–24.
Chi, O. H., Chi, C. G., Gursoy, D., and Nunkoo, R. (2023). Customers’ acceptance of artificially intelligent service robots: the influence of trust and culture. Int. J. Inf. Manag. 70, 102623. doi:10.1016/j.ijinfomgt.2023.102623
de Jong, C., Peter, J., Kühne, R., and Barco, A. (2022). Children’s intention to adopt social robots: a model of its distal and proximal predictors. Int. J. Soc. Robotics 14, 875–891. doi:10.1007/s12369-021-00835-0
Jake, B., Heitz, C., Sanghvi, S., and Wagle, D. (2020). How artificial intelligence will impact k-12 teachers. Available at: https://www.mckinsey.com/industries/education/our-insights/how-artificial-intelligence-will-impact-k-12-teachers (Accessed January 30, 2020).
Johal, W., Castellano, G., Tanaka, F., and Okita, S. (2018). Robots for learning. Int. J. Soc. Robotics 10, 293–294. doi:10.1007/s12369-018-0481-8
Jones, A., and Castellano, G. (2018). Adaptive robotic tutors that support self-regulated learning: a longer-term investigation with primary school children. Int. J. Soc. Robotics 10, 357–370. doi:10.1007/s12369-017-0458-z
Kanero, J., Geçkin, V., Oranç, C., Mamus, E., Küntay, A. C., and Göksun, T. (2018). Social robots for early language learning: current evidence and future directions. Child. Dev. Perspect. 12, 146–151. doi:10.1111/cdep.12277
Konijn, E. A., Jansen, B., Mondaca Bustos, V., Hobbelink, V. L., and Preciado Vanegas, D. (2022). Social robots for (second) language learning in (migrant) primary school children. Int. J. Soc. Robotics 14, 827–843. doi:10.1007/s12369-021-00824-3
Kory-Westlund, J. M., and Breazeal, C. (2019). A long-term study of young children’s rapport, social emulation, and language learning with a peer-like robot playmate in preschool. Front. Robotics AI 6, 81. doi:10.3389/frobt.2019.00081
Lee, Y.-H., and Jia, Y. (2014). Using response time to investigate students’ test-taking behaviors in a naep computer-based study. Large-scale Assessments Educ. 2, 8–24. doi:10.1186/s40536-014-0008-1
Ligthart, M. E., de Droog, S. M., Bossema, M., Elloumi, L., Hoogland, K., Smakman, M. H., et al. (2023). “Design specifications for a social robot math tutor,” in Proceedings of the 2023 ACM/IEEE international conference on human-robot interaction (New York: Association for Computing Machinery), 321–330.
Lim, V., Rooksby, M., and Cross, E. S. (2021). Social robots on a global stage: establishing a role for culture during human–robot interaction. Int. J. Soc. Robotics 13, 1307–1333. doi:10.1007/s12369-020-00710-4
Lin, C.-Y., Shen, W.-W., Tsai, M.-H. M., Lin, J.-M., and Cheng, W. K. (2020). “Implementation of an individual English oral training robot system,” in International conference on innovative technologies and learning (Springer), 40–49.
Louie, B., Björling, E. A., and Kuo, A. C. (2021). The desire for social robots to support English language learners: exploring robot perceptions of teachers, parents, and students. Front. Educ. 6, 566909. doi:10.3389/feduc.2021.566909
Matarić, M. J., and Scassellati, B. (2016). Socially assistive robotics. Springer handbook of robotics, 1973–1994.
Naneva, S., Sarda Gou, M., Webb, T. L., and Prescott, T. J. (2020). A systematic review of attitudes, anxiety, acceptance, and trust towards social robots. Int. J. Soc. Robotics 12, 1179–1201. doi:10.1007/s12369-020-00659-4
Ordieres-Meré, J., Gutierrez, M., and Villalba-Díez, J. (2023). Toward the industry 5.0 paradigm: increasing value creation through the robust integration of humans and machines. Comput. Industry 150, 103947. doi:10.1016/j.compind.2023.103947
Pachidis, T., Vrochidou, E., Kaburlasos, V. G., Kostova, S., Bonković, M., and Papić, V. (2019). “Social robotics in education: state-of-the-art and directions,” in Advances in service and industrial robotics. Editors N. A. Aspragathos, P. N. Koustoumpardis, and V. C. Moulianitis (Cham: Springer International Publishing), 689–700.
Pashevich, E. (2022). Can communication with social robots influence how children develop empathy? Best-evidence synthesis. AI and Soc. 37, 579–589. doi:10.1007/s00146-021-01214-z
Pinto, A. H., Ranieri, C. M., Nardari, G., Tozadore, D. C., and Romero, R. A. (2018). “Users’ perception variance in emotional embodied robots for domestic tasks,” in 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), João Pessoa, Brazil, 06-10 November 2018 (IEEE), 476–482.
Pinto, A. H. M., Tozadore, D. C., and Romero, R. A. F. (2015). “A question game for children aiming the geometrical figures learning by using a humanoid robot,” in 2015 12th Latin American Robotics Symposium and 2015 3rd Brazilian Symposium on Robotics (LARS-SBR), Uberlandia, Brazil, 29-31 October 2015, 228–233. doi:10.1109/lars-sbr.2015.62
Roser, M. (2023). Technology over the long run: zoom out to see how dramatically the world can change within a lifetime. Our World Data.
Saari, U. A., Tossavainen, A., Kaipainen, K., and Mäkinen, S. J. (2022). Exploring factors influencing the acceptance of social robots among early adopters and mass market representatives. Robotics Aut. Syst. 151, 104033. doi:10.1016/j.robot.2022.104033
Šabanović, S. (2010). Robots in society, society in robots: mutual shaping of society and technology as a framework for social robot design. Int. J. Soc. Robotics 2, 439–450. doi:10.1007/s12369-010-0066-7
Scoglio, A. A., Reilly, E. D., Gorman, J. A., and Drebing, C. E. (2019). Use of social robots in mental health and well-being research: systematic review. J. Med. Internet Res. 21, e13322. doi:10.2196/13322
Serholt, S., Barendregt, W., Leite, I., Hastie, H., Jones, A., Paiva, A., et al. (2014). “Teachers’ views on the use of empathic robotic tutors in the classroom,” in The 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25-29 August 2014 (IEEE), 955–960.
Shi, C., Shiomi, M., Kanda, T., Ishiguro, H., and Hagita, N. (2015). Measuring communication participation to initiate conversation in human–robot interaction. Int. J. Soc. Robotics 7, 889–910. doi:10.1007/s12369-015-0285-z
Smakman, M., Vogt, P., and Konijn, E. A. (2021a). Moral considerations on social robots in education: a multi-stakeholder perspective. Comput. and Educ. 174, 104317. doi:10.1016/j.compedu.2021.104317
Smakman, M., Vogt, P., and Konijn, E. A. (2021b). Moral considerations on social robots in education: a multi-stakeholder perspective. Comput. and Educ. 174, 104317. doi:10.1016/j.compedu.2021.104317
Sonderegger, S., Guggemos, J., and Seufert, S. (2022). “How social robots can facilitate teaching quality–findings from an explorative interview study,” in International conference on robotics in education (RiE) (Springer), 99–112.
Sunny, M. S. H., Rahman, M. M., Haque, M. E., Banik, N., Ahmed, H. U., and Rahman, M. H. (2023). “Assistive robotic technologies: an overview of recent advances in medical applications,” in Medical and healthcare robotics. Editor O. Boubaker (Elsevier Science), 1–23.
Szafir, D., and Szafir, D. A. (2021). “Connecting human-robot interaction and data visualization,” in Proceedings of the 2021 ACM/IEEE international conference on human-robot interaction (New York, NY, USA: Association for Computing Machinery), 281–292. doi:10.1145/3434073.3444683
Tozadore, D., Hannauer Valentini, J. P., Rodrigues, V. H., Pazzini, J., and Romero, R. (2019a). When social adaptive robots meet school environments. Available at: https://aisel.aisnet.org/amcis2019/cognitive_in_is/cognitive_in_is/4/.
Tozadore, D., Pinto, A., Romero, R., and Trovato, G. (2017). “Wizard of oz vs autonomous: children’s perception changes according to robot’s operation condition,” in 2017 26th IEEE international symposium on robot and human interactive communication (RO-MAN), 664–669. doi:10.1109/ROMAN.2017.8172374
Tozadore, D., Pinto, A. H., Valentini, J., Camargo, M., Zavarizz, R., Rodrigues, V., et al. (2019b). Project r-castle: robotic-cognitive adaptive system for teaching and learning. IEEE Trans. Cognitive Dev. Syst. 11, 581–589. doi:10.1109/tcds.2019.2941079
Tozadore, D., Ranieri, C., Nardari, G., Guizilini, V., and Romero, R. (2018a). “Effects of emotion grouping for recognition in human-robot interactions,” in 2018 7th Brazilian conference on intelligent systems (BRACIS) (IEEE), 438–443.
Tozadore, D., and Romero, R. (2017). “Comparison of image recognition techniques for application in humanoid robots in interactive educational activities. from portuguese: Comparação de técnicas de reconhecimento de imagens para aplicacã̧o em robô humanoides em atividades interativas educacionais,” in XXII Conferência Internacional sobre Informática na Educação, Fortaleza - CE.
Tozadore, D. C., Guneysu Ozgur, A., and Kuoppamäki, S. (2023). “Teacher’s perception on social robots to promote the integration of children with migration background,” in Proceedings of the 11th international conference on human-agent interaction (New York, NY, USA: Association for Computing Machinery), 392–394.
Tozadore, D. C., Pinto, A. H., and Romero, R. A. (2016). “Variation in a humanoid robot behavior to analyse interaction quality in pedagogical sessions with children,” in 2016 XIII Latin American Robotics Symposium and IV Brazilian Robotics Symposium (LARS/SBR), Recife, Brazil, 08-12 October 2016, 133–138. doi:10.1109/LARS-SBR.2016.29
Tozadore, D. C., and Romero, R. A. F. (2020). Graphical user interface for educational content programming with social robots activities and how teachers may perceive it. Rev. Bras. Inform. Educ. 28, 191–207. doi:10.5753/rbie.2020.28.0.191
Tozadore, D. C., and Romero, R. A. F. (2021). “Multimodal fuzzy assessment for robot behavioral adaptation in educational children-robot interaction,” in Companion publication of the 2020 international conference on multimodal interaction (New York, NY, USA: Association for Computing Machinery), 392–399. doi:10.1145/3395035.3425201
Tozadore, D. C., Valentini, J. P. H., de Souza Rodrigues, V. H., Vendrameto, F. M. L., Zavarizz, R. G., and Romero, R. A. F. (2018b). “Towards adaptation and personalization in task based on human-robot interaction,” in 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE), João Pessoa, Brazil, 06-10 November 2018 (IEEE), 383–389.
van Ewijk, G., Smakman, M., and Konijn, E. A. (2020). “Teachers’ perspectives on social robots in education: an exploratory case study,” in Proceedings of the interaction design and children conference (New York, NY, USA: Association for Computing Machinery), 273–280. doi:10.1145/3392063.3394397
Van Minkelen, P., Gruson, C., Van Hees, P., Willems, M., De Wit, J., Aarts, R., et al. (2020). “Using self-determination theory in social robots to increase motivation in l2 word learning,” in Proceedings of the 2020 ACM/IEEE international conference on human-robot interaction. Editors T. Belpaeme, J. Young, H. Gunes, and L. Riek (New York: Association for Computing Machinery), 369–377.
Veling, L., and McGinn, C. (2021). Qualitative research in hri: a review and taxonomy. Int. J. Soc. Robotics 13, 1689–1709. doi:10.1007/s12369-020-00723-z
Viola, P., and Jones, M. (2001). “Rapid object detection using a boosted cascade of simple features,” in Computer Vision and Pattern Recognition, 2001. CVPR 2001, Kauai, HI, USA, 08-14 December 2001 (IEEE), I.
Woo, H., LeTendre, G. K., Pham-Shouse, T., and Xiong, Y. (2021). The use of social robots in classrooms: a review of field-based studies. Educ. Res. Rev. 33, 100388. doi:10.1016/j.edurev.2021.100388
Xia, Y., and LeTendre, G. (2021). Robots for future classrooms: a cross-cultural validation study of “negative attitudes toward robots scale” in the us context. Int. J. Soc. Robotics 13, 703–714. doi:10.1007/s12369-020-00669-2
Youssef, K., Said, S., Alkork, S., and Beyrouthy, T. (2023). Social robotics in education: a survey on recent studies and applications. Int. J. Emerg. Technol. Learn. 18, 67–82. doi:10.3991/ijet.v18i03.33529
Appendix
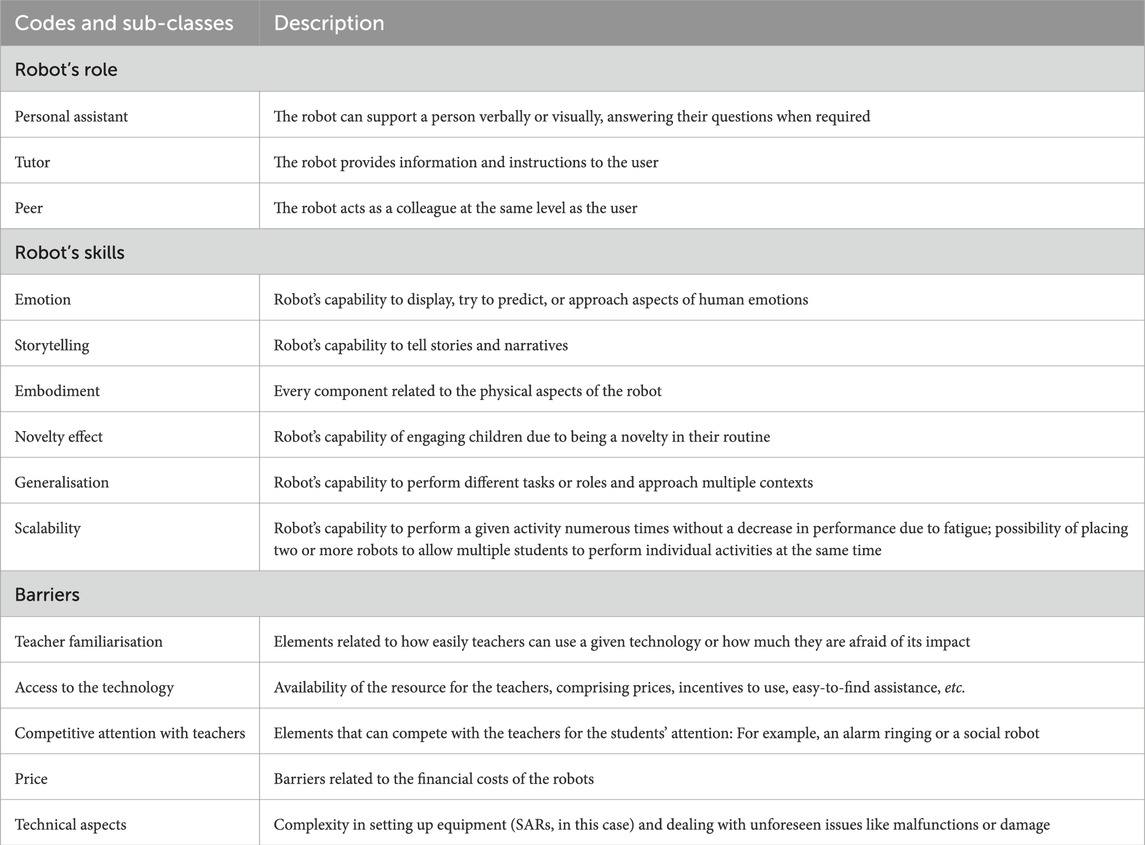
Table a1. Detailed coding scheme used in the thematic analysis of Section 5.
Keywords: social robots, education, HRI, teachers, children–robot interaction, interactive designn
Citation: Tozadore DC and Romero RAF (2024) Multiuser design of an architecture for social robots in education: teachers, students, and researchers perspectives. Front. Robot. AI 11:1409671. doi: 10.3389/frobt.2024.1409671
Received: 30 March 2024; Accepted: 30 October 2024;
Published: 16 December 2024.
Edited by:
Roger K. Moore, The University of Sheffield, United KingdomReviewed by:
Juan S. Toquica, Federal University of Ceara, BrazilKiju Lee, Texas A&M University, United States
Copyright © 2024 Tozadore and Romero. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Daniel C. Tozadore, ZHRvemFkb3JlQGdtYWlsLmNvbQ==