 Jerry Tang
Jerry Tang Karan P. Jain
Karan P. Jain Mark W. Mueller
Mark W. Mueller
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
CORRECTION article
Front. Robot. AI, 19 April 2023
Sec. Bio-Inspired Robotics
Volume 10 - 2023 | https://doi.org/10.3389/frobt.2023.1199090
A Corrigendum on
QUaRTM: A quadcopter with unactuated rotor tilting mechanism capable of faster, more agile, and more efficient flight
by Tang J, Jain KP and Mueller MW (2022). Front. Robot. AI 9:1033715. doi: 10.3389/frobt.2022.1033715
We would like to address three issues identified in our publication. Specifically, we have made necessary corrections to errors present in tables relating to vehicle properties, rectified an error in a figure pertaining to an outdoor experiment, and included additional information on wind conditions during experiments. We regret for our oversight of these issues in the original article and want to emphasize that the scientific conclusions drawn in the article remain unaffected. The original article has been updated.
In the published article, there were errors in Table 1 Experimental vehicle frame properties and Table 2 Experimental vehicle tilting-related properties, as published. A structural change was made to the experimental vehicle to improve its modularity, and several properties were changed but were not updated. The corrected vehicle properties are as follows: a = 5 cm, k = 8 N cm−1,
In addition, there was an error in Figure 13, which shows the vehicle commanded thrusts and the measured accelerations. Data from an indoor flight test were accidentally used, and the coordinate transformation matrix used to change the IMU reference frame was not transposed, resulting in a negative xC acceleration when the propellers are tilted forward, as shown by the plot, whereas the acceleration should be positive. A corrected plot with outdoor flight data and the right acceleration values is shown in the following figure. The description has also been updated to reflect the changes.
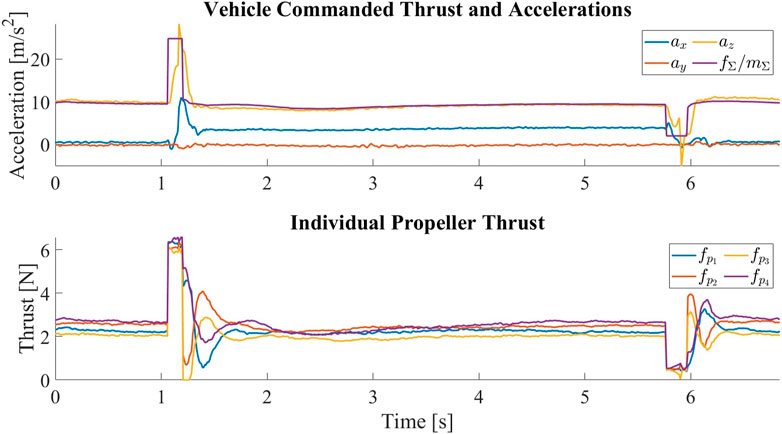
FIGURE 13. The vehicle commanded thrust normalized by the vehicle mass and the measured accelerations in the central body frame C for one tilt and untilt cycle. At around t =1s, the vehicle is commanded to tilt by producing a sudden high thrust. The surge in thrust is followed by a surge in the acceleration along zC, which is then followed by an increase in the acceleration along xC, meaning that the thrust axes of the propellers have been tilted forward. The negative xC acceleration between transitions indicates the change of the vehicle’s pitch angle such that the propellers are pointing upward to keep the vehicle at hover. At around t =4.5s, the vehicle is commanded to untilt by producing a sudden low thrust. The drop in thrust is followed by a drop in the acceleration along zC, which is then followed by a drop in the magnitude of acceleration along xC, meaning that the thrust axes of the propellers have been restored. Despite the change in the mapping matrix, we can see that the individual propeller thrusts are very close once the vehicle has stabilized after the transition.
The authors would also like to add information on the wind condition in the first paragraph of 4.1 Experiment setup. The corrected paragraph is given as follows:
“For all of our tests, we fly the vehicle outdoors in a flat grass field at the Richmond Field Station, Richmond. All the speed measurements are ground speeds, and while we do not specifically characterize the influence of wind, we strive to ensure consistency in the experimental results by 1) conducting experiments only when the wind is low, 2) conducting experiments in a short time frame to minimize wind variation, and 3) flying the vehicle consistently in the same direction.
The vehicle is localized by fusing readings from the following sensors:”
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Keywords: morphing quadcopter, agile, efficient, high-speed, mechanism design (MD), aerodynamics
Citation: Tang J, Jain KP and Mueller MW (2023) Corrigendum: QUaRTM: A Quadcopter with Unactuated Rotor Tilting Mechanism capable of faster, more agile, and more efficient flight. Front. Robot. AI 10:1199090. doi: 10.3389/frobt.2023.1199090
Received: 02 April 2023; Accepted: 04 April 2023;
Published: 19 April 2023.
Approved by:
Frontiers Editorial Office, Frontiers Media SA, SwitzerlandCopyright © 2023 Tang, Jain and Mueller. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Jerry Tang, amVycnl0YW5nQGJlcmtlbGV5LmVkdQ==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.