 Zhen Xie
Zhen Xie Xinquan Liang
Xinquan Liang Canale Roberto1
Canale Roberto1- 1Advanced Remanufacturing and Technology Centre (ARTC), Agency for Science, Technology and Research (A*STAR), Singapore, Singapore
- 2Singapore Institute of Manufacturing Technology (SIMTech), Agency for Science, Technology and Research (A*STAR), Singapore, Singapore
As personalization technology increasingly orchestrates individualized shopping or marketing experiences in industries such as logistics, fast-moving consumer goods, and food delivery, these sectors require flexible solutions that can automate object grasping for unknown or unseen objects without much modification or downtime. Most solutions in the market are based on traditional object recognition and are, therefore, not suitable for grasping unknown objects with varying shapes and textures. Adequate learning policies enable robotic grasping to accommodate high-mix and low-volume manufacturing scenarios. In this paper, we review the recent development of learning-based robotic grasping techniques from a corpus of over 150 papers. In addition to addressing the current achievements from researchers all over the world, we also point out the gaps and challenges faced in AI-enabled grasping, which hinder robotization in the aforementioned industries. In addition to 3D object segmentation and learning-based grasping benchmarks, we have also performed a comprehensive market survey regarding tactile sensors and robot skin. Furthermore, we reviewed the latest literature on how sensor feedback can be trained by a learning model to provide valid inputs for grasping stability. Finally, learning-based soft gripping is evaluated as soft grippers can accommodate objects of various sizes and shapes and can even handle fragile objects. In general, robotic grasping can achieve higher flexibility and adaptability, when equipped with learning algorithms.
1 Introduction
Robotic grasping is an area of research that not only emphasizes improving gripper design that can handle a wide variety of objects but also drives advances in intelligent object recognition and pose estimation algorithms. Grasping objects differ in terms such as weight, size, texture, transparency, and fragility factors. To achieve efficient robotic grasping, the collaboration and integration of mechanical and software modules play a pivotal role, which also opens several possibilities for enhancing the current state of the art of robotic grasping technology. For instance, tactile feedback from gripper fingertips can serve as a valid input for grasping decision makers (Xie et al., 2021) to determine the grasping stability, and visual servoing can correct the grasping misalignment (Thomas et al., 2014).
This paper provides insights into industries such as manufacturing, logistics, or fast-moving consumer goods (FMCG) that face challenges after the adoption of pre-programmed robots. These robots require reprogramming when new applications are needed, thus being suitable only for limited application scenarios. This results in pre-programmed robots to be inadequate for fast-changing processes. Moreover, most of the solutions are unable to pick or grasp novel unknown objects in a high-mix and low-volume (HMLV) production line, as shown in Figure 1. These high-mixed SKUs include various types of products, for example, heavy, light, flat, large, small, rigid, soft, fragile, deformable, and translucent.
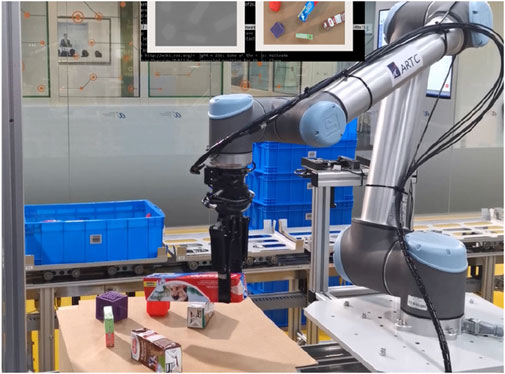
FIGURE 1. Robotic grasping in the cluttered FMCG scenario.
In general, grasping can be applied to three types of objects: familiar, known, and unknown (Bohg et al., 2013). Known objects mean the objects that have been included in the training previously and the grasping pose has been generated and executed by the robots for the grasping motion. On the contrary, unknown objects and familiar objects are never encountered previously, but familiar objects have a certain similarity with training datasets. Grasping for known objects has been implemented in the industry for quite some time as the technology is mature when compared to the other two categories. The challenge lies in grasping familiar or unknown objects with minimum training or reconfiguration required. The research and development focus on transferring the grasping motion from known objects to familiar or unknown objects based on the interpretation and synthetic data (Stansfield, 1991; Saxena et al., 2008; Fischinger and Vincze, 2012). Based on the grasping evaluation metric, grasping with the best scores would be selected among all the grasping candidates, as shown in Figure 2.
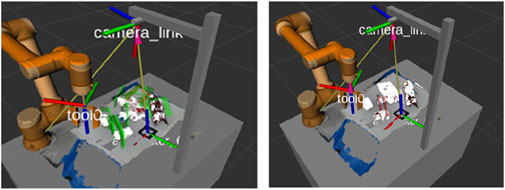
FIGURE 2. (A) Grasping pose candidates by sampling. (B) Final grasping pose with the maximum score.
Grasping poses can be ranked by similarities in the grasping database. Moreover, because of its high difficulty, current research is chiefly focused on developing deep learning (DL) models for grasping unknown objects, with some prominent ones utilizing deep convolutional neural networks (DCNNs), 2.5D RGBD images, and depth images of a scene (Richtsfeld et al., 2012; Choi et al., 2018; Morrison et al., 2018). These methods are generally successful in determining the optimal grasp of various objects, but they are often restricted by logistical issues such as limited data and testing.
The flow chart of a general grasping process, including offline generation and online grasping, is demonstrated in Figure 3. In the offline phase, the training was conducted on grasping different objects. Moreover, the quality is evaluated for each grasping process. After that, the grasping model is generated based on the training process and stored in the database. Moreover, in the online phase, the object is detected through vision and mapped to the model database. A grasping pose is generated from the learning database, and those objects that cannot be grasped are discarded. Finally, the grasping motion is conducted by the robot.
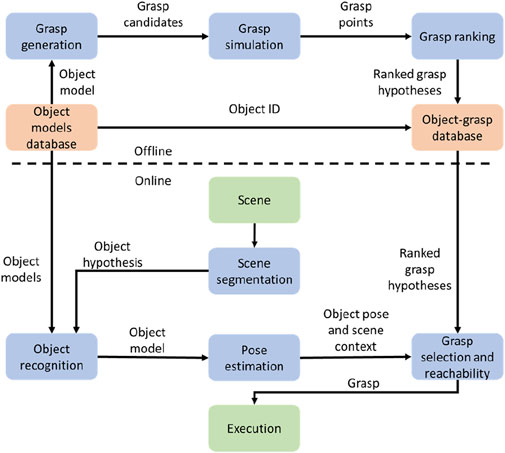
FIGURE 3. Online and offline processes of grasping generation (Bohg et al., 2013).
In this paper, we reviewed over 150 papers on the topic of intelligent grasping. We categorize the literature into six main categories. To be more specific, 3D object recognition, grasping configuration, and grasping pose detection are some typical grasping sequences. Deep learning and deep reinforced learning are also reviewed as widely used methods for grasping and sensing. As one of the trending gripping technologies, soft and adaptive grippers with smart sensing and grasping algorithms are reviewed. Finally, tactile sensing technologies, which enable smart grasping, are reviewed as well. The search criteria used were the following:
• Year: 2010 has been selected as the cutoff year such that the bulk of the papers reflect the last dozen years. A few exceptions before 2010 were included due to their exceptional relevance.
• Keywords: “3D object recognition”, “robotic grasping”, “learning based”, “grasping configuration”, “deep learning”, “grasping pose detection”, “deep learning for unknown grasping”, “soft gripper”, “soft grippers for grasping”, “tactile sensors”, and “tactile sensors for grasping” were the keywords used.
• Categories: paper selection requirement included belonging to one of the following overarching categories:
o Robotic grasping
o Robotic tactile sensors
o Soft gripping
o Learning-based approaches
Results were filtered out based on individual keywords or key word combinations, using the AND and OR operand between keywords. Moreover, Google Scholar, IEEE Xplore, and arXiv were deployed as the main sources of search engine for the literature in both journals and conference proceedings between 2017 and 2022. In total, excluding duplicates, we found 329 papers close to the unseen object grasping theme, out of which 157 had the full text available. In Section 2, we conduct a review on the most significant contributions and developments in robotic grasping, soft grippers, and tactile sensors for grasping. Section 3 contains an analysis of the challenges for learning-based approaches for grasping; Section 4 summarizes our findings.
Figure 4 demonstrates the trend in the number of publications of learning algorithms for intelligent grasping in recent years. The graph shows the growth in the number of published works from this literature review in the field of intelligent grasping with a focus on the three major approaches, namely, supervised learning, reinforcement learning, and unsupervised learning. The data covers the period from 2015 to 2022, demonstrating the increasing interest and advancements in the development of intelligent grasping algorithms; in particular, since 2017, there has been a significant increase in supervised learning, unsupervised learning, and reinforcement learning. However, supervised learning is still the most adopted approach for AI-driven robotic grasping.
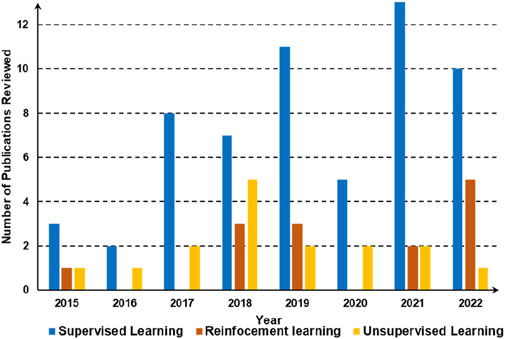
FIGURE 4. Number of publications of learning algorithms for intelligent grasping in recent years.
2 Methods and recent developments
A. 3D object recognition benchmarks
The first step for the grasping sequence is to identify the grasping object. 2D learning-based object recognition has been well developed in computer vision. Thus, in this section, we will focus on the advances on 3D learning-based object recognition. Traditionally, the object point cloud can be segmented from the environment based on region growing (Vo et al., 2015) and the Point Cloud Library (PCL) (Zhen et al., 2019). After that, principal component analysis (PCA) (Abdi and Williams, 2010) can be deployed to identify the centroid point of the object along the eigenvector (Katz et al., 2014), which can be used as inputs for robotic grasping. Next, the Iterative Closest Point (ICP) (Besl and McKay, 1992; Chitta et al., 2012) is also a popular approach to registering the available model into the point cloud to locate the object for grasping. However, the disadvantage is the need for tuning excessive hyperparameters. Concerning benchmarks such as ImageNet, ResNet-50, and AlexNet (Dhillon and Verma, 2020), two parallel DCNNs can be deployed to extract multimodal features from RGB and depth images, respectively (Kumra and Kanan, 2017). The same theory is applied to other enhanced 3D approaches, for example, 3D Faster R-CNN (Li et al., 2019), 3D Mask R-CNN (Gkioxari et al., 2019), and SSD (Kehl et al., 2017).
With the advances of big data, there are many 3D object benchmarks emerging where either point clouds were collected or labeled, such as PointNet (Qi et al., 2017a), PointNet++ with deep hierarchical feature learning (Qi et al., 2017b), BigBird (Zaheer et al., 2020), Semantic3D (Hackel et al., 2017), PointCNN (Li et al., 2018a), SpiderCNN (Xu et al., 2018), Indoor inference NYUD-V2, and Washington RGB-D Object Dataset (Lai et al., 2011), or 3D model datasets were gathered with information such as textures, shapes, hierarchies, weight, and rigidity, for example, ShapeNet (ChangFunkhouser et al., 2015), PartNet (Mo et al., 2019), ModelNet (Wu et al., 2015), and YCB (Calli et al., 2015). Other approaches apply convolution to the voxelization of point clouds VoxNet (Maturana and Scherer, 2015) and Voxception-ResNet (Brock et al., 2016). However, high memory and computational costs are key drawbacks associated with 3D convolutions. Specifically, a segmentation algorithm can be built upon these datasets to separate and locate the object in the clustered environment.
Overall, point cloud-based approaches perform more efficiently when the raw point cloud input is sparse and noisy (Shi et al., 2019). Moreover, it can reduce data preprocessing time since raw point clouds can be used directly as inputs and object identification is omitted, so efforts for sampling, 3D mesh conversion, and 3D registration are saved. Most notably, CAD data might not be available all the time. However, point cloud datasets can lose information that is critical for grasping, such as textures, materials, and surface normals. Topology needs to be recovered in order to improve the representation of the point cloud (Wang et al., 2019).
B. Grasping configuration sampling benchmarks
Learning for object recognition is not enough for robotic manipulation. The subsequent step relies on the grasping pose estimation (Du et al., 2021) based on the gripper configuration. In particular, grasping perception can be treated as analogous to traditional CV object detection (Fischinger et al., 2013; Herzog et al., 2014) with RGBD or point clouds as inputs. First, a grasping region of interest (ROI) is sampled and identified; next, a large number of grasping poses can be generated based on big training datasets without knowing object identification (Kappler et al., 2015). This approach works well for novel objects; however, the success rate is not reliable enough to be implemented in the real-world scenarios. Template matching using the convex hull or bounding box is another grasping pose detection method (Herzog et al., 2012).
Except for the large-scale data collection and empirical grasp planning in physical trials directly (Levine et al., 2018), there are plenty of grasping benchmarks that contain sizable numbers of grasping datasets, which can be categorized into different groups based on the grasping technology or gripper configuration. GraspNet (Fang et al., 2020), SuctionNet (Cao et al., 2021), DexYCB (Chao et al., 2021), OCRTOC (Liu et al., 2021), the Columbia Grasp Database (Goldfeder et al., 2009), Cornell dataset (Jiang et al., 2011), off-policy learning (Quillen et al., 2018), TransCG (Fang et al., 2022) for transparent objects, and Dex-net (MahlerLiang et al., 2017; Mahler et al., 2018) are the most prominent benchmarks. Furthermore, Dex-net 4.0 trained ambidextrous policies for a parallel jaw and a vacuum-based suction cup gripper. Though learning-based grasping detection still needs handcrafted inputs to generalize to unknown objects (Murali et al., 2018), methods such as multiple convolutional neural networks (CNNs) (Lenz et al., 2015) in a sliding window detection pipeline are proposed to address the issues.
In contrast, GraspIt (Miller and Allen, 2004) utilizes a simulator to predict the grasping pose; however, fidelity in a simulation environment is still far from the real world, as demonstrated in Figure 5. Domain randomization (Tobin et al., 2017) can be the key to transfer the learning of simulated data. GraspNet (Fang et al., 2020) is a popular open project for general object grasping that is continuously enriched. There are 97,280 3D images in total and each image is annotated with an accurate 1.1 billion 6D poses for each object, and 190 cluttered scenes were captured using Kinect A4Z and RealSense D435. Moreover, Jiang et al. (2011) proposed a method for the oriented grasping rectangle representation that considers the seven-dimensional gripper configuration and uses it for fast search inference in the learning algorithm. The limitation is that the grasping diversity is affected by the rectangular configuration, and the grasping area is restrained.
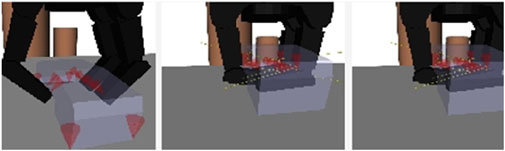
FIGURE 5. GraspIt simulator for pose prediction (Miller and Allen, 2004).
Among the most popular grasping pose sampling benchmarks, the literature reports a 91.6% prediction accuracy rate and an 87.6% grasping success rate on selected grasping objects for the Cornell datasets (Jiang et al., 2011), while GraspNet has been shown to attain a success rate of 88% on a range of objects with diverse appearances, scales, and weights that are frequently used in daily life (Mousavian et al., 2019). Dex-Net 4.0 claims a reliability of over 95% for 25 novel objects. Previously, the GQ-CNN-based Dex-Net 3.0 showed a precision of 99% and 97% for the basic and typical objects in the dataset (Mahler et al., 2018), respectively. PointNet 40-class classification has 89.2% accuracy rate using the ModelNet40 compared to 85.9% by VoxNet and 84.7% by 3D ShapeNets (Qi et al., 2017a). Last but not least, using the same datasets, SpiderCNN achieves an accuracy of 92.4% on standard benchmarks while PointNet++ reaches 91.9% (Xu et al., 2018).
C. Grasping pose evaluation (GPE)
Grasping pose evaluation is the selection process to find the most suitable grasping candidate based on the specific evaluation metrics after grasping pose sampling. Many non-learning-based grasping pose evaluation metrics have been developed, such as SVM ranking model analysis-by-synthesis optimization (AbS) (Krull et al., 2015), kernel density estimation (Detry et al., 2011), and robust grasp planning (RGP) (MahlerLiang et al., 2017), as have other physics-based approaches such as force closure (Nguyen, 1988), caging (Rodriguez et al., 2012), and Grasp Wrench Space (GWS) analysis (Roa and Suárez, 2015). Only recently, learning-based approaches have been proposed, such as variational autoencoders (VAE) for DL (Mousavian et al., 2019; Pelossof et al., 2004), the cross-entropy method (CEM) for RL (De Boer et al., 2005), random forest (Asif et al., 2017a), grasp quality convolutional neural network (GQ-CNN) (Mahler et al., 2018), deep geometry-aware grasping network (DGGN) (Yan et al., 2018), grasp success predictor based on deep CNN (DCNN), and dynamic graph CNN (Wang et al., 2019). Moreover, we have also seen trends of the fusion of classic approaches with deep learning (empirical), such as AbS combined with deep learning for reliable performance on uncontrolled images (Egger et al., 2020), cascaded architecture of random forests (Asif et al., 2017a), and a supervised bag-of-visual-words (BOVW) model with SVM (Pelossof et al., 2004) or AdaBoost (Bekiroglu et al., 2011).
The schematic of the ambidextrous grasping policy-learning process is shown in Figure 6. Synthetic 3D-object datasets are generated via computer-aided design (CAD) with some domain randomization. The generated objects are tested in the synthetic training environment to evaluate the rewards, which are computed consistently based on the resistance to grasping. In terms of policy learning, parallel jaw and suction grippers are trained by optimizing a deep GQ-CNN to predict the probability of grasp success from the point cloud of the 3D CAD model objects. The training dataset contains millions of synthetic examples from the previous generation step. Furthermore, for robot execution, the ambidextrous policy is adopted by a real-world robot to select a gripper to maximize the grasp success rate using a separate GQ-CNN for each gripper.
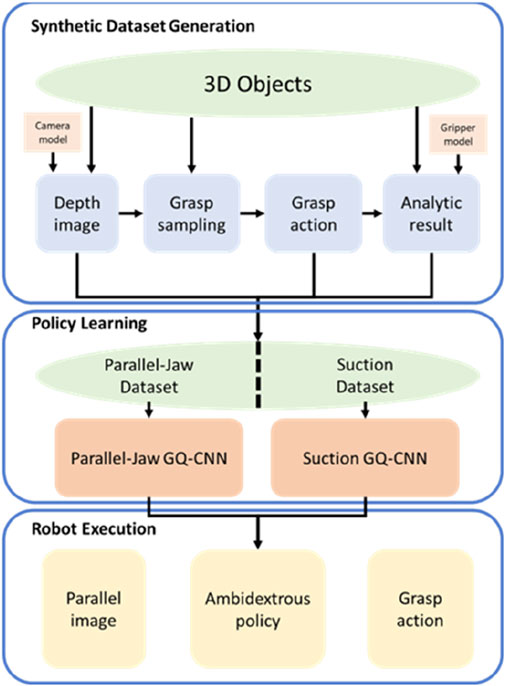
FIGURE 6. Ambidextrous grasping policy learning (Mahler et al., 2019).
Grasping Pose Detection (GPD) (ten Pas et al., 2017) utilizes a four-layer CNN-based grasp quality evaluation model. Even though the heuristic produces diverse grasping candidates, the limitation is that the GPD might mistake multiple objects as one due to a lack of object segmentation, and the GPD might have overfitting problems when the point cloud is sparse.
Similarly, PointNetGPD (Liang et al., 2019) introduces lightweight network architecture by the point cloud within a gripping finger that is transformed into a local grasp representation. The orthogonal approaching and parallel moving directions are along the ZXY axes, respectively, with the origin lying at the bottom center of the gripper. The grasping quality is evaluated by N points that are passed through the network.
Xie et al. (2022) proposed a universal soft gripping method with a decision maker based on tactile sensor feedback on objects with varying shapes and textures, which is a further improvement from the PointNetGPD baseline (Liang et al., 2019). Figure 7 shows the grasping of enoki mushroom that is unknown to the training databases.
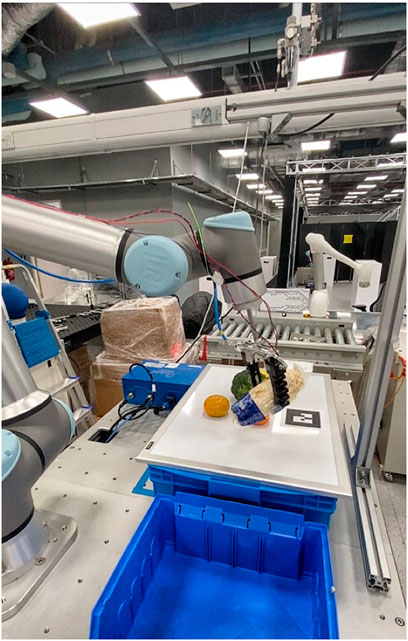
FIGURE 7. Data-driven soft gripping on the novel object.
Table 1 shows the comparison table between various grasping pose evaluation methods in terms of inputs, grasping type, specifications, and learning type in the recent literature. If force (force closure) or wrench (GWS) is taken into consideration, only grasping hand or finger grippers can be used for this type of application. However, force closure requires tactile sensor reading to be more accurate and real time in order to be practical (Saito et al., 2022). Moreover, parametric GPE such as SVM can be applied if the grasping shape can be represented or estimated by parameters. SVM, random forest, and supervised bag-of-visual-words are utilized for supervised or self-supervised learning applications only. When a large number of data are presented, data-driven learning-based methods such as GPD and DGGN are more suitable to make sense of big data and perform better than other types of GPE methods. Last but not least, ensemble learning methods, such as AdaBoost, have gained more attention recently, which combine multiple learning methods to provide better evaluation results (Yan et al., 2022).
D. Reinforcement learning (RL) approach

TABLE 1. Learning-based grasping pose evaluation.
RL does result in flexible and more adaptable robotic grasping algorithms. Policy gradient methods, model-based methods, and value-based methods are the three most popular deep reinforcement learning methods (Arulkumaran et al., 2017). However, value-based learning such as Q-learning has the limitation of optimization on a non-convex value function, thus making it difficult for large-scale RL tasks until scalable RL with stochastic optimization over the critic was proposed to avoid second maximizer networks (Kalashnikov et al., 2018). These algorithms can be further divided into two categories: off-policy learning and tactile feedback. Off-policy learning (Quillen et al., 2018) is emphasized and generalized to unseen objects. Common off-policy learning methods include Point Cloud Library (PCL) (Nachum et al., 2017), deep deterministic policy gradient (DDPG) methods (LillicrapHunt et al., 2015), deep Q-learning (MnihKavukcuoglu et al., 2013), Monte Carlo (MC) policy evaluation (Xie and Zhong, 2016a; Arulkumaran et al., 2017), and more robust-corrected Monte Carlo methods (Betancourt, 2017).
Human-labeled data are intrinsically subjective due to human bias, which is a problem of increasing concern in machine learning (Xie et al., 2017; Fonseca et al., 2021). Researchers have attempted to adopt unsupervised learning by trial and error for object manipulation learning from scratch (Boularias et al., 2015) but were restrained by a small amount of data. Pinto and Gupta (2016) trained CNN using large-scale datasets and proved that multi-stage training can get rid of overfitting problems for self-supervised robotic grasping (Zhu et al., 2020).
Self-supervised learning (Berscheid et al., 2019) that connects manipulation primitive shifting with prehensile action grasping based on Markov decision processes (MDPs) can significantly improve grasping in clustered scenarios. Some other prominent works, such as Visual Pushing and Grasping (VPG) (Zeng et al., 2018), utilize two fully convolutional networks trained by self-supervised Q-learning for inference of pushes and grasps, respectively, based on the sampling of end effector orientation and position. The limitation is that only simple push and grasping motions are considered among all the non-prehensile manipulation primitives, and the grasping objects demonstrated are regular shapes. Finally, motion primitives are pre-defined, and alternative parameterizations are needed to improve the motion expressiveness. Multi-functional grasping (Deng et al., 2019) with a deep Q-Network (DQN) can improve the successful grasping rate from the clustered environment by tagging the performance of suction gripping.
Our review involved comparing data-driven approaches with deep reinforcement learning (DRL) approaches (Kalashnikov et al., 2018), and it revealed that the limitations of DRL such as being data-intensive, complex, and collision-prone, preventing itself from being industry ready.
E. Chronological map
Figure 8 presents the development of key learning algorithms for intelligent grasping from 2015 to 2022. The data show the popularity of three main categories of algorithms, namely, supervised learning, reinforced learning, and unsupervised learning. The size of each bubble represents the number of research papers published in each category, while the x-axis indicates the year of publication. Some popular algorithms include PointNet, PointNet++, and 3D ShapeNets. The figure indicates that supervised learning is still the major algorithm used for intelligent grasping. Reinforced learning and unsupervised learning are also obtaining more attention in recent years.
F. Soft gripping technology
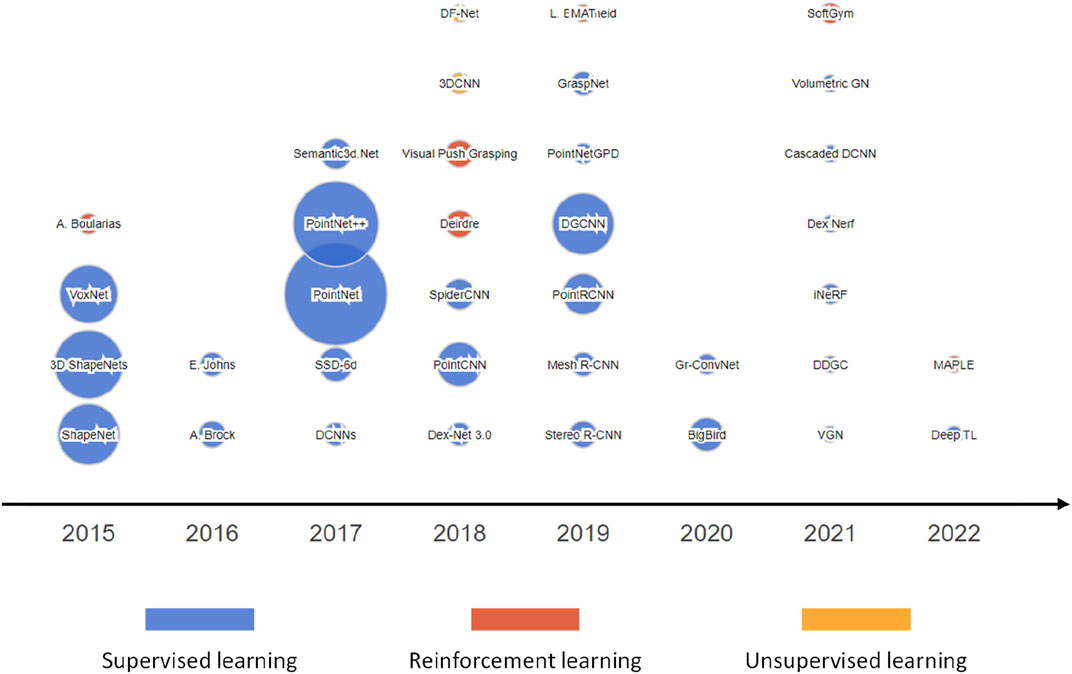
FIGURE 8. Key learning algorithms for intelligent grasping.
As an alternative to traditional rigid grippers, soft grippers have been researched and developed in the last decade (Rus and Tolley, 2015; Hughes et al., 2016; Shintake et al., 2018; Whitesides, 2018). Due to the intrinsic softness and compliance of gripper materials and actuation mechanisms, the control complexity is greatly reduced for handling delicate objects and irregular-shaped objects. The early studies on soft grippers mainly focused on soft materials, structure design optimization, and actuating mechanisms. In recent years, control strategies and smart grasping are becoming more essential in soft gripper research. Learning algorithms are adopted in soft grippers to enable intelligent grasping. The objective of using learning algorithms mainly falls into two domains: object detection/classification during grasping and increasing grasping success rates.
To enable object detection/classification when grasping using soft grippers, the sensors are usually integrated on the soft fingers to perceive the grasping mode. To detect the deformation of each finger, strain sensors are implemented into the soft grippers (Elgeneidy et al., 2018; Jiao et al., 2020; Souri et al., 2020; Zuo et al., 2021). These sensors can detect the deformation of bending actuators so that the grasping pose of different fingers can be estimated. Long short-term memory (LSTM) (Xie and Zhong, 2016b) is typically utilized to process the data and classify the objects from the SoftMax function (Zuo et al., 2021). However, since the strain sensors are normally made for one axis detection, they are usually insufficient for detection and need to be used together with other sensors such as tactile (Zuo et al., 2021) and vision (Jiao et al., 2020) sensors. Tactile sensors are widely used for detecting objects (Jiao et al., 2020; She et al., 2020; YangHan et al., 2020; Subad et al., 2021; Zuo et al., 2021; Deng et al., 2022). They can be built and fabricated on a small scale and embedded into soft grippers. Tactile sensors can be made from capacitance sensing (Jiao et al., 2020; Zuo et al., 2021), optical fiber-based sensing (YangHan et al., 2020), microfluidics, (Deng et al., 2022), or even vision-based tactile sensors (She et al., 2020). Since the grasping motion dynamically changes with time, LSTM is usually adopted to process the data and classify the objects. Other kinds of sensors, such as IMU (Della Santina et al., 2019; Bednarek et al., 2021), can be used to detect the motion of the soft gripper to estimate the grasping process. LSTM is used for IMU sensors (Bednarek et al., 2021), but CNN-based methods, such as YOLO v2, are applied if vision is used together with IMU (Della Santina et al., 2019).
Vision-based learning algorithms are widely used to train the grasping mode and increase the grasping success rate. De Barrie et al. (2021) proposed a study on using CNN to capture the deformation of an adaptive gripper so that the stress on the gripper can be estimated to detect the grasping motion. Yang et al. (2020) used a fully convolution neural network (FCNN) to detect whether the grasping was successful, and the grasping data were based on the soft–rigid, rigid–soft, and soft–soft interaction. Liu et al.( 2022b) used double deep Q-learning (DDQN)-based deep reinforced learning to train a multimodal soft gripper for employing different grasping modes (grasping or vacuum suction) for different objects. Wan et al. (2020) used CNN to detect the objects and benchmark the effectiveness of using different finger structures (three or four fingers; circular or parallel) for object grasping. Zimmer et al. (2019) integrated accelerometer, magnetometer, gyroscope, and pressure data on the soft gripper and used RealSense to detect the objects. Different learning algorithms, including support vector machine (SVM), Spatio-Temporal Hierarchical Matching Pursuit (ST-HMP), FFNN, and LSTM, were compared in this study based on their sensor structures.
To conclude this, the combination of soft grippers with learning algorithms is still a new research field, and the papers have mainly been published in the past 4 years. The compliant properties of the soft gripper eases the concerns regarding grasping delicate objects, while object detection/classification and grasping mode optimization is the key research field. LSTM-based learning algorithms are widely used for object detection/classification during grasping, and CNN-based algorithms are used for vision-based learning for increasing grasping success rates.
G. Tactile sensors for robotic grasping
Tactile feedback is an alternative area for off-policy learning. Wu et al. (2019) achieved grasps by coarse initial positioning of the multi-fingered robot hand.
The maximum entropy (MaxEnt) RL policy is optimized through Proximal Policy Optimization (PPO) with a clipped surrogate objective to learn exploitation and exploration (E/E) strategies. The robot can decide the grasping recovery and whether to proceed with a re-grasp motion based on the proprioceptive information.
Tactile sensing technology has been rapidly developing in the past few years with strong interest from the research community. Tactile sensors are classified according to their physical properties and how they acquire data: capacitive, resistive, piezoelectric, triboelectric, ultrasonic, optical, inductive, and magnetic (Wang et al., 2019), (Baldini et al., 2022), (Dahiya and Valle, 2008). Traditionally used in the medical and biomedical industry for prosthetic rehabilitation or robotic surgery applications (Al-Handarish et al., 2020), tactile technology is now common in robotics. Grasping and manipulation tasks exploit tactile sensors for contact point estimation, surface normals, slip detections, and edge or curvature measurements (Kuppuswamy et al., 2020), (Dahiya and Valle, 2008), while recent applications for physical HRI are proposed by Grella et al. (2021). These sensors can provide dense and detailed contact information, especially in occluded spaces where vision is unreliable. However, these sensing capabilities can be worsened by external object compliance (Kuppuswamy et al., 2020).
Traditional low-cost off-the-shelf force-sensitive resistor tactile sensors (Tekscan, 2014) are still used as tactile sensors to provide end-of-arm tools (EOAT) with force sensing capabilities. Current research studies, however, show different trends and design principles when developing new tactile technologies. These can be summarized as follows:
• Minimal and resilient design (Subad et al., 2021), (Kuppuswamy et al., 2020): low power, simple wiring, minimal dimensions, single layers, durable, and resistant to stress (mechanical and shear).
• Distributed (Jiao et al., 2020), (Cannata et al., 2008), (Kuppuswamy et al., 2020): expandable, flexible, conformable, and spatially calibrated.
• Information dense (Elgeneidy et al., 2018; Xie and Zhong, 2016b; Yuan et al., 2017; Jeremy et al., 2013): high resolution, multimodal sensing, and multi-dimensional contact information.
These design principles are extracted from the current state-of-the-art tactile sensing technology. Novel and established tactile sensors are summarized in Table 2, which highlights each sensor’s technological features and their use in machine learning for grasping.
H. Deep learning via tactile technology
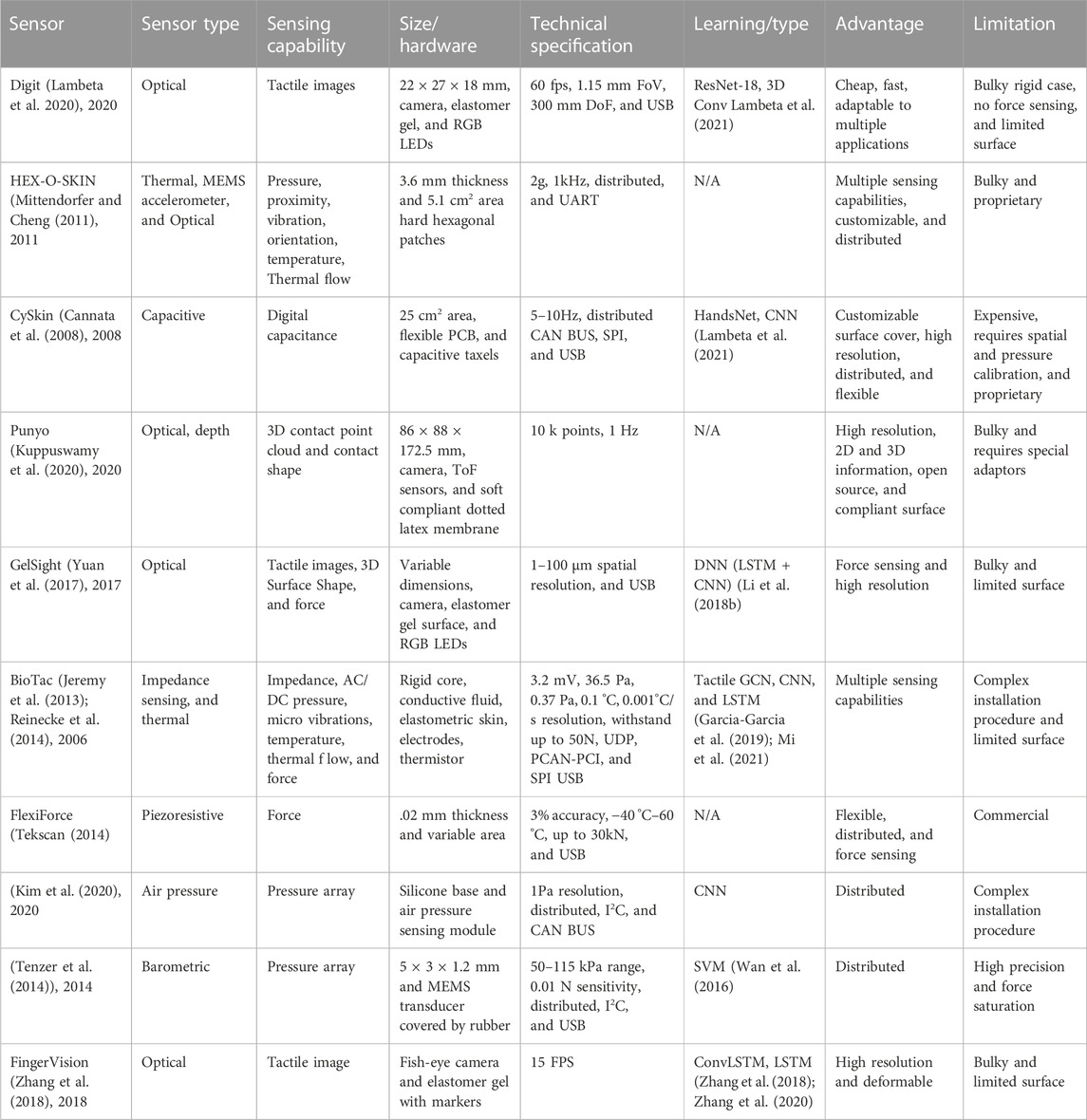
TABLE 2. Learning-based tactile sensing.
Deep learning and neural networks have successfully attempted to use tactile data as input and feedback in grasping and manipulation stability evaluation. Sensors such as GelSight (Yuan et al., 2017) or DIGIT (Lambeta et al., 2020) are already supported by open-source software packages to simulate, test, and train grasping and manipulation. TACTO (Wang et al., 2022c) is a PyBullet-based open-source simulator that is able to reproduce and render tactile contacts, learn manipulation tasks, and reproduce them in the real world. PyTouch (Lambeta et al., 2021) is a machine learning library to process tactile contacts and provides built-in solutions such as contact detection. Tactile sensors and modern machine learning techniques are used to solve grasp stability, control, contact detection, and grasp correction. Contact models, grasp stability, and slip detections are learnable outputs that can be generalized to novel objects for dexterous grasping (Kopicki et al., 2014). Schill et al. (2012) and Cockbum et al. (2017) used tactile sensors mounted on a robotic hand for bin picking which were able to generate a tactile image that is fed to SVM algorithms, achieving between 70% and 80% grasping stability in both papers. Wan et al. (2016) had a similar set-up and used another SVM prediction from tactile contact to classify grasp outcomes. Li et al. (2018b) mounted pressure sensors on a three-finger gripper and used an SVM for stability prediction; despite the 90% accuracy, the limited performance of SVMs is acknowledged in the previous papers, and the authors encourage the use of more complex algorithms. Grella et al. (2021) used a tactile skin for an industrial pHRI application gripper by human detection via a simple DNN called HandsNet. Wan et al. (2016) proposed various LSTM-based DNNs and Pixel Motion to predict contact detection from tactile images generated from the FingerVision sensor, achieving 98.5% accuracy. Kim et al. (2020) used a simple DNN to linearize tactile information, which was then used to optimize the proposed torque control scheme. Calandra et al. (2018) compared tactile only and vision + tactile information to improve grasping; tactile and visual images were fed to ResNet, and multi-layer perceptron evaluated grasp success stability. Li et al. (2018b) proposed a similar architecture with the GelSight tactile sensor + vision on pre-trained networks with LSTM and an FC layer to detect slip during grasping, showing how multimodal inputs can, in general, improve grasp stability and avoid slippage. A graph convolutional network acquiring tactile data from the BioTac was proposed in both Garcia-Garcia et al. (2019) and Mi et al. (2021) to predict grasp stability; this method can, in general, outperform LSTM and SVM, but both papers show that the higher the graph connectivity, the lower the accuracy.
3 Trends and challenges
In this section, we discuss the trends and challenges on grasping benchmarks, tactile sensors, and learning-based soft gripping.
A. Learning-based grasping pose generation
Several 3D grasping sampling benchmarks emerged with the help of learning-based 3D segmentation benchmarks. The current development of learning-based grasping pose generation provides advantages of adaptability to novel objects and various gripper configurations. However, the success rate is still not reliable enough to be implemented in the real world, and manual feature engineering is still needed to generalize to unknown objects. We can see trends of the fusion of traditional approaches with an empirical approach to address the grasping quality evaluation. Grasping from the clustered environment remains a challenge as non-prehensile primitive actions (Zeng et al., 2018) are involved to decouple the occluded objects. Moreover, multimodal perception data (Saito et al., 2021) have been used besides vision to provide broader coverage regarding the grasping stability. However, grasping tagged on reinforcement learning demonstrates the tendency to become computationally lightweight, free from overfitting, simplified, and more collision aware. Last but not least, how to enrich training datasets using synthetic simulation data still remains a research challenge.
B. Tactile sensors and grasping
The literature shows that tactile sensors are being developed with Minimal, Resilient, Distributed and Information Dense Design as guiding principles (Cannata et al., 2008; Mittendorfer and Cheng, 2011; Zimmer et al., 2019; Wan et al., 2020). This is to improve the hardware and software implementation and provide meaningful information regarding the contact. The main limitations of these sensors are bulky designs, complex integration, and costs. The main advantage is in providing rich multimodal information in an occluded situation or when the visual input is not sufficient. Vision-based tactile sensors are becoming increasingly popular as tactile images are a rich kind of information that can be successfully used in machine learning.
Grasping is intrinsically variable due to variations in the target pose and position, the grasping hardware and software, and the external environment (Wan et al., 2016). Adopting successful grasping policies is the challenge that tactile machine learning is successfully attempting to solve. SVM is a typical approach that has been successfully implemented to predict grasping stability (Schill et al., 2012; Wan et al., 2016; Cockbum et al., 2017; Li et al., 2018b) with acceptable accuracy but limited generalizability. Traditional CNNs have been proposed in Li et al. (2018b), Calandra et al. (2018), and Lambeta et al. (2021) for various applications, such as tactile image classification, which can be useful in various scenarios. Novel and efficient use of GCN is shown in Zhang et al. (2018) and Zhang et al. (2020) despite limited generalizability and a trade-off in size and accuracy. LSTM networks have been successfully proposed for grasp detection, stability, and slip detection (Schill et al., 2012; Li et al., 2018b; Zhang et al., 2018; Zhang et al., 2020) in various scenarios and applications. CNNs have also been used together with LSTM for grasping stability (Garcia-Garcia et al., 2019). Overall, the review shows that LSTM is the most promising class of DNNs for tactile sensors, as sequences of tactile images provide more insightful and usable data. There is a little known work on contact wrenches and torsional and tangential force interpretation (Zhang et al., 2020) with either DNNs or traditional algorithms. This has a high potential to improve grasping stability and force-closure estimation.
Overall, machine learning and tactile technologies are still being heavily researched; however, tactile sensors are becoming cheaper and more readily available, and a few valid design principles and trends have been identified such as Minimal and Resilient Design, Distributed, and Information Dense. On the other hand, ML applications with tactile technology are still at an exploratory stage, with no clear dominant market trend or approach. This shows that the technology is still not yet industry ready and is quite immature, which leaves room for further research and improvement toward more reliable and accurate solutions.
C. Learning-based soft gripping
Deep learning and deep reinforced learning have dominated the recent research to train the soft grippers for successful grasp and object detection. However, the soft grippers used for training are usually not state-of-the-art design architectures. Cable-driven underactuated soft grippers and adaptive soft grippers are still the trends in this field. In the future, a more functional soft gripper with versatile grasping capabilities should be used for smart grasping operations. Furthermore, most of the research employed very mature algorithms, such as LSTM, for tactile-based sensing and CNN for vision-based sensing. The development of more specific algorithms for soft grippers is necessary to fully utilize the advantages of the soft grippers. Moreover, to extend the sensing capabilities and enable more precise grasping, various sensors, such as force sensors, strain sensors, and vision systems, need to be further developed and integrated into the soft grippers. With more features from the sensors, object detection can have higher accuracy.
4 Conclusion
In this study, we first conducted a literature survey on data-driven 3-day benchmarks and grasping pose sampling algorithms. After that, grasping evaluation metrics and deep learning-based grasping pose detection were discussed. The comparison results showed that the learning-based approach performs quite well in terms of grasping unknown objects. In terms of the success rate of grasping, the current learning-based methods fail to achieve a reliable percentage for real-world-ready products and are not yet ready for production line deployment. Finally, we did see trends in the development of tactile sensors and soft gripping technology to improve grasping stability. Some recent work has been carried out on learning-based grasping with tactile feedback, and we could see that more compatible robotic sensors have emerged. A clear finding is that a successful and effective solution is the combination of the right problem statement with suitable hardware and the proper AI-enabled algorithm. With the findings regarding the current technologies and research trends, the current challenges of learning-based grasping pose generation, tactile sensing, and soft gripping are proposed. We expect future works will focus on multimodal deep learning with various supplementary grasping proprioceptive and exteroceptive information.
Author contributions
ZX contributed to most parts of the paper; CR contributed to the study on the tactile sensors and learning for tactile sensors; and XL contributed to the reviews of soft gripping and learning methods.
Funding
This research was supported by the Advanced Remanufacturing and Technology Center under Project No. C22-05-ARTC for AI-Enabled Versatile Grasping and Robotic HTPO Seed Fund (Award C211518007).
Acknowledgments
The authors thank their colleagues and ARTC industry members who provided insight and expertise that greatly assisted the research.
Conflict of interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
References
Abdi, H., and Williams, L. J. (2010). Principal component analysis. Wiley Interdiscip. Rev. Comput. Stat. 2 (4), 433–459. doi:10.1002/wics.101
Brock, A., Lim, T., and Ritchie, J. M. (2016). Generative and discriminative voxel modeling with convolutional neural networks. eprint arXiv:1608.04236.
Al-Handarish, Y., Omishore, O., and Igbe, T. (2020). A survey of tactile-sensing systems and their applications in biomedical engineering. Adv. Mater. Sci. Eng. 2020. doi:10.1155/2020/4047937
Arulkumaran, K., Deisenroth, M. P., Brundage, M., and Bharath, A. A. (2017). Deep reinforcement learning: A brief survey. IEEE Signal Process. Mag. 34 (6), 26–38. doi:10.1109/msp.2017.2743240
Asif, U., Bennamoun, M., and Sohel, F. A. (2017). RGB-D object recognition and grasp detection using hierarchical cascaded forests. IEEE Trans. Robotics 33 (3), 547–564. doi:10.1109/tro.2016.2638453
Asif, U., Bennamoun, M., and Sohel, F. A. (2017). RGB-D object recognition and grasp detection using hierarchical cascaded forests. IEEE Trans. Robot. 33 (3), 547–564. doi:10.1109/tro.2016.2638453
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P., Huang, Q., Li, Z., et al. (2015). ShapeNet: An information-rich 3d model repository. arXiv preprint.
Ayoobi, H., Kasaei, H., Cao, M., Verbrugge, R., Verheij, B. J. R., and Systems, A. (2022). Local-HDP: Interactive open-ended 3D object category recognition in real-time robotic scenarios. Rob. Auton. Syst. 147, 103911. doi:10.1016/j.robot.2021.103911
Zeng, A., Song, S., Welker, S., Lee, J., Rodriguez, A., and Funkhouser, T. (2018).” Learning synergies between pushing and grasping with self-supervised deep reinforcement learning," in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October 1-5, 2018, 4238–4245.
Baldini, G., Albini, A., Maiolino, P., and Cannata, G. (2022). An atlas for the inkjet printing of large-area tactile sensors. Sensors 22 (6), 2332. doi:10.3390/s22062332
Bednarek, M., Kicki, P., Bednarek, J., and Walas, K. J. E. (2021). Gaining a sense of touch object stiffness estimation using a soft gripper and neural networks. Electronics 10 (1), 96. doi:10.3390/electronics10010096
Bekiroglu, Y., Laaksonen, J., Jorgensen, J. A., Kyrki, V., and Kragic, D. J. (2011). Assessing grasp stability based on learning and haptic data. Assess. grasp Stab. based Learn. haptic data 27 (3), 616–629. doi:10.1109/tro.2011.2132870
Berscheid, L., Meißner, P., and Kröger, T. (2019). “Robot learning of shifting objects for grasping in cluttered environments,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, SAR, China, November 3-8, 2019, 612–618.
Besl, P. J., and McKay, N. D. (1992). Method for registration of 3-D shapes. Sens. fusion IV control paradigms data Struct. 1611, 586–606.
Bohg, J., Morales, A., Asfour, T., and Kragic, D. (2013). Data-driven grasp synthesis—A survey. IEEE Trans. Robotics 30 (2), 289–309. doi:10.1109/tro.2013.2289018
Boularias, A., Bagnell, J. A., and Stentz, A. (2015). “Learning to manipulate unknown objects in clutter by reinforcement,” in Twenty-Ninth AAAI Conference on Artificial Intelligence, Hyatt Regency Austin, Texas, USA, January 25–30, 2015.
Wu, B., Akinola, I., Varley, J., and Allen, P. (2019). Mat: Multi-fingered adaptive tactile grasping via deep reinforcement learning. arXiv preprint.
Calandra, R., Owens, A., Jayaraman, D., Lin, J., Yuan, W., Malik, J., et al. (2018). More than a feeling: Learning to grasp and regrasp using vision and touch. IEEE Robot. Autom. Lett. 3 (4), 3300–3307. doi:10.1109/lra.2018.2852779
Calli, B., Singh, A., Walsman, A., Srinivasa, S., Abbeel, P., and Dollar, A. M. (2015). “The ycb object and model set: Towards common benchmarks for manipulation research,” in 2015 international conference on advanced robotics (ICAR), Istanbul, Turkey, July 27-31, 2015, 510–517.
Cannata, G., Maggiali, M., Metta, G., and Sandini, G. (2008). “An embedded artificial skin for humanoid robots,” in 2008 IEEE International conference on multisensor fusion and integration for intelligent systems, Seoul, Korea, August 20-22, 2008, 434–438.
Cao, H., Fang, H.-S., Liu, W., and Lu, C. (2021). Suctionnet-1billion: A large-scale benchmark for suction grasping. IEEE Robtics Automation Lett. 6 (4), 8718–8725. doi:10.1109/lra.2021.3115406
Goldfeder, C., Ciocarlie, M., Dang, H., and Allen, P. K. (2009)”. The columbia grasp database,” in 2009 IEEE international conference on robotics and automation, Kobe, Japan, May 12 - 17, 2009, 1710–1716.
Chao, Y.-W., Yang, W., Xiang, Y., Molchanov, P., Handa, A., Wyk, K. V., et al. (2021). “DexYCB: A benchmark for capturing hand grasping of objects,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 19-25 June 2021, 9044–9053.
Chitta, S., Jones, E. G., Ciocarlie, M., and Hsiao, K. (2012). Mobile manipulation in unstructured environments: Perception, planning, and execution. IEEE Robtics Automation Mag. Special Issue Mob. Manip. 19 (2), 58–71. doi:10.1109/mra.2012.2191995
Choi, C., Schwarting, W., DelPreto, J., and Rus, D. (2018). Learning object grasping for soft robot hands. IEEE Robotics Automation Lett. 3 (3), 2370–2377. doi:10.1109/lra.2018.2810544
Cockbum, D., Roberge, J.-P., Maslyczyk, A., and Duchaine, V. (2017). “Grasp stability assessment through unsupervised feature learning of tactile images,” in 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, May 29 - June 3, 2017, 2238–2244.
Dahiya, R. S., and Valle, M. (2008). “Tactile sensing for robotic applications,” in Sensors: Focus on tactile, force and stress sensors (London, UK: IntechOpen), 298–304.
De Barrie, D., Pandya, M., Pandya, H., Hanheide, M., and Elgeneidy, K. (2021). A deep learning method for vision based force prediction of a soft fin ray gripper using simulation data. Front. Robotics AI 104, 631371. doi:10.3389/frobt.2021.631371
De Boer, P.-T., Kroese, D. P., Mannor, S., and Rubinstein, R. (2005). A tutorial on the cross-entropy method. Ann. Operations Res. 134 (1), 19–67. doi:10.1007/s10479-005-5724-z
de Souza, J. P. C., Rocha, L. F., Oliveira, P. M., Moreira, A. P., Boaventura-Cunha, J. J. R., and Manufacturing, C.-I. (2021). Robotic grasping: From wrench space heuristics to deep learning policies. Robot. Comput. Integr. Manuf. 71, 102176. doi:10.1016/j.rcim.2021.102176
Della Santina, C., Arapi, V., Averta, G., Damiani, F., Fiore, G., Settimi, A., et al. (2019). Learning from humans how to grasp: A data-driven architecture for autonomous grasping with anthropomorphic soft hands. IEEE Robot. Autom. Lett. 4 (2), 1533–1540. doi:10.1109/lra.2019.2896485
Deng, L., Shen, Y., Fan, G., He, X., Li, Z., and Yuan, Y. (2022). Design of a soft gripper with improved microfluidic tactile sensors for classification of deformable objects. IEEE Robot. Autom. Lett. 7 (2), 5607–5614. doi:10.1109/lra.2022.3158440
Deng, Y., Guo, X., Wei, Y., Lu, K., Fang, B., Guo, D., et al. (2019). “Deep reinforcement learning for robotic pushing and picking in cluttered environment,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, SAR, China, November 3-8, 2019, 619–626.
Detry, R., Kraft, D., Kroemer, O., Bodenhagen, L., Peters, J., Kruger, N., et al. (2011). Learning grasp affordance densities. Paladyn, J. Behav. Robotics 2 (1), 1–17. doi:10.2478/s13230-011-0012-x
Dhillon, A., and Verma, G. K. J. P. i. A. I. (2020). Convolutional neural network: A review of models, methodologies and applications to object detection. Prog. Artif. Intell. 9 (2), 85–112. doi:10.1007/s13748-019-00203-0
Maturana, D., and Scherer, S. (2015). “VoxNet: A 3d convolutional neural network for real-time object recognition,” in 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS), Hamburg, Germany, 28 September - 3 October 2015. 922–928.
Morrison, D., Corke, P., and Leitner, J. (2018). Closing the loop for robotic grasping: A real-time, generative grasp synthesis approach. arXiv preprint.
Du, G., Wang, K., Lian, S., and Zhao, K. J. A. I. R. (2021). Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: A review. Artif. Intell. Rev. 54 (3), 1677–1734. doi:10.1007/s10462-020-09888-5
Egger, B., Smith, W. A. P., Tewari, A., Wuhrer, S., Zollhoefer, M., Beeler, T., et al. (2020). 3d morphable face models—Past, present, and future. ACM Trans. Graph. 39 (5), 1–38. doi:10.1145/3395208
Elgeneidy, K., Neumann, G., Jackson, M., and Lohse, N. (2018). Directly printable flexible strain sensors for bending and contact feedback of soft actuators. Front. Robotics AI 2, 2. doi:10.3389/frobt.2018.00002
Ergene, M. C., and Durdu, A. (2017). “Robotic hand grasping of objects classified by using support vector machine and bag of visual words,” in 2017 International Artificial Intelligence and Data Processing Symposium (IDAP), Malatya, Turkey, 16-17 September 2017, 1–5.
Fang, H.-S., Wang, C., Gou, M., and Lu, C. (2020). “Graspnet-1billion: A large-scale benchmark for general object grasping,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, Seattle, WA, USA, June 13 2020 to June 19 2020, 11444–11453.
Fischinger, D., and Vincze, M. (2012). “Empty the basket-a shape based learning approach for grasping piles of unknown objects,” in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, Portugal, October 7-12, 2012, 2051–2057.
Fischinger, D., Vincze, M., and Jiang, Y. (2013). “Learning grasps for unknown objects in cluttered scenes,” in 2013 IEEE international conference on robotics and automation, Karlsruhe, Germany, Held 6-10 May 2013, 609–616.
Jeremy, F., Gary, L., Gerald, L., and Peter, B. (2013). Biotac product manual. Available: https://www.syntouchinc.com/wp-content/uploads/2018/08/BioTac-Manual-V.21.pdf.
Liu, F., Fang, B., Sun, F., Li, X., Sun, S., and Liu, H. (2022). Hybrid robotic grasping with a soft multimodal gripper and a deep multistage learning scheme. arXiv preprint.
Fonseca, E., Favory, X., Pons, J., Font, F., and Serra, X. (2021). FSD50k: An open dataset of human-labeled sound events. IEEE/ACM Trans. Audio, Speech, Lang. Process. 30, 829–852. doi:10.1109/taslp.2021.3133208
Garcia-Garcia, A., Zapata-Impata, B. S., Orts-Escolano, S., Gil, P., and Garcia-Rodriguez, J. (2019). “TactileGCN: A graph convolutional network for predicting grasp stability with tactile sensors,” in 2019 International Joint Conference on Neural Networks (IJCNN), Budapest. Submission Deadline, Dec 15, 2018, 1–8.
Gkioxari, G., Malik, J., and Johnson, J. (2019). “Mesh R-CNN,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, Oct. 27 2019 to Nov. 2 2019, 9785–9795.
Grella, F., Baldini, G., Canale, R., Sagar, K., Wang, S. A., Albani, A., et al. (2021). “A tactile sensor-based architecture for collaborative assembly tasks with heavy-duty robots,” in 2021 20th International Conference on Advanced Robotics (ICAR), Ljubljana, Slovenia, 06-10 December 2021, 1030–1035.
Herzog, A., Pastor, P., Kalakrishnan, M., Righetti, L., Asfour, T., and Schaal, S. (2012). “Template-based learning of grasp selection,” in 2012 IEEE international conference on robotics and automation, St Paul, Minnesota, USA, 14-18 May 2012, 2379–2384.
Herzog, A., Pastor, P., Kalakrishnan, M., Righetti, L., Bohg, J., Asfour, T., et al. (2014). Learning of grasp selection based on shape-templates. Auton. Robots 36 (1), 51–65. doi:10.1007/s10514-013-9366-8
Fang, H., Fang, H.-S., Xu, S., and Lu, C. (2022). TransCG: A large-scale real-world dataset for transparent object depth completion and grasping. ArXiv preprint.
Hughes, J., Culha, U., Giardina, F., Guenther, F., Rosendo, A., and Iida, F. (2016). Soft manipulators and grippers: A review. Front. Robotics AI 3, 69. doi:10.3389/frobt.2016.00069
Huang, I., Nagaraj, Y., Eppner, C., and Sundarlingam, B. (2021). Defgraspsim: Simulation-based grasping of 3d deformable objects.arXiv.
Irshad, M. Z., Zakharov, S., Ambrus, R., Kollar, T., Kira, Z., and Gaidon, A. (2022). “ShAPO: Implicit representations for multi-object shape, appearance, and pose optimization,” in Computer vision – eccv 2022 (Cham: Springer Nature Switzerland), 275–292.
Jiang, D., Li, G., Sun, Y., Hu, J., Yun, J., and Liu, Y. (2021). Manipulator grabbing position detection with information fusion of color image and depth image using deep learning. J. Ambient. Intell. Humaniz. Comput. 12 (12), 10809–10822. doi:10.1007/s12652-020-02843-w
Jiang, P., Oaki, J., Ishihara, Y., Ooga, J., Han, H., Sugahara, A., et al. (2022). Learning suction graspability considering grasp quality and robot reachability for bin-picking. Orig. Res. 16. doi:10.3389/fnbot.2022.806898
Jiang, Y., Moseson, S., and Saxena, A. (2011). “Efficient grasping from RGB-D images: Learning using a new rectangle representation,” in 2011 IEEE International conference on robotics and automation, Shanghai, China, 9-13 May 2011, 3304–3311.
Jiao, C., Lian, B., Wang, Z., Song, Y., and Sun, T. (2020). Visual–tactile object recognition of a soft gripper based on faster Region-based Convolutional Neural Network and machining learning algorithm. Int. J. Adv. Robotic Syst. 17 (5), 172988142094872. doi:10.1177/1729881420948727
Liang, J., and Boularias, A. J. (2022). Learning category-level manipulation tasks from point clouds with dynamic graph CNNs. arXiv.
Mahler, J., Liang, J., Niyaz, S., Laskey, M., Doan, R., Liu, X., et al. (2017). Dex-net 2.0: Deep learning to plan robust grasps with synthetic point clouds and analytic grasp metrics. arXiv preprint.
Reinecke, J., Dietrich, A., Schmidt, F., and Chalon, M. (2014).” Experimental comparison of slip detection strategies by tactile sensing with the BioTac® on the DLR hand arm system,” in 2014 IEEE international Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May - 7 June 2014, 2742
Kalashnikov, D., Irpan, A., Pastor, P., Ibarz, J., Herzog, A., Jang, E., et al. (2018). “Scalable deep reinforcement learning for vision-based robotic manipulation,” in Conference on Robot Learning, New Zealand, December 14 to 18, 2022, 651–673.
Kappler, D., Bohg, J., and Schaal, S. (2015). “Leveraging big data for grasp planning,” in 2015 IEEE international conference on robotics and automation (ICRA), Seattle, Washington, USA, 26-30 May 2015, 4304–4311.
Katyara, S., Deshpande, N., Ficuciello, F., Chen, F., Siciliano, B., and Caldwell, D. G. (2021). Fusing visuo-tactile perception into kernelized synergies for robust grasping and fine manipulation of non-rigid objects. Comput. Sci. Eng. - Sci. Top. 2021.
Katz, D., Venkatraman, A., Kazemi, M., Bagnell, J. A., and Stentz, A. J. A. R. (2014). Perceiving, learning, and exploiting object affordances for autonomous pile manipulation. Auton. Robots 37 (4), 369–382. doi:10.1007/s10514-014-9407-y
Kehl, W., Manhardt, F., Tombari, F., Ilic, S., and Navab, N. (2017). “SSD-6d: Making RGB-based 3d detection and 6d pose estimation great again,” in Proceedings of the IEEE international conference on computer vision, Venice, Italy, 22-29 October 2017, 1521–1529.
Kim, D., Lee, J., Chung, W.-Y., and Lee, J. J. S. (2020). Artificial intelligence-based optimal grasping control. Sensors (Basel). 20 (21), 6390. doi:10.3390/s20216390
Kopicki, M., Detry, R., Schmidt, F., Borst, C., Stolkin, R., and Wyatt, J. L. (2014). “Learning dexterous grasps that generalise to novel objects by combining hand and contact models,” in 2014 IEEE international conference on robotics and automation (ICRA), Hong Kong, China, Held 31 May - 7 June 2014, 5358–5365.
Krull, A., Brachmann, E., Michel, F., Yang, M. Y., Gumhold, S., and Rother, C. (2015). “Learning analysis-by-synthesis for 6D pose estimation in RGB-D images,” in Proceedings of the IEEE international conference on computer vision, Santiago, Chile, Held 7-13 December 2015, 954–962.
Kumra, S., and Kanan, C. (2017). “Robotic grasp detection using deep convolutional neural networks,” in 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, September 24 - 1, 2017, 769–776.
Lai, K., Bo, L., Ren, X., and Fox, D. (2011). “A large-scale hierarchical multi-view RGB-D object dataset,” in 2011 IEEE international conference on robotics and automation, Shangai, China, May 9, 2011- May 13, 2011, 1817–1824.
Lambeta, M., Chou, P. W., Tian, S., Yang, B., Maloon, B., Most, V. R., et al. (2020). Digit: A novel design for a low-cost compact high-resolution tactile sensor with application to in-hand manipulation. IEEE Robot. Autom. Lett. 5 (3), 3838–3845. doi:10.1109/lra.2020.2977257
Lambeta, M., Xu, H., Xu, J., Chou, P. W., Wang, S., Darrell, T., et al. (2021). “PyTouch: A machine learning library for touch processing,” in 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi'an, China, 30 May 2021 - 05 June 2021, 13208–13214.
Lenz, I., Lee, H., and Saxena, A. (2015). Deep learning for detecting robotic grasps. Int. J. Robotics Res. 34 (4-5), 705–724. doi:10.1177/0278364914549607
Levine, S., Pastor, P., Krizhevsky, A., and Ibarz, J. (2018). Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection. Sage J. 37 (4-5), 421–436. doi:10.1177/0278364917710318
Li, J., Dong, S., and Adelson, E. (2018). “Slip detection with combined tactile and visual information,” in 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21-25 May 2018, 7772–7777.
Li, P., Chen, X., and Shen, S. (2019). “Stereo R-CNN based 3d object detection for autonomous driving,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, June 15 2019 to June 20 2019, 7644–7652.
Li, Y., Bu, R., Sun, M., Wu, W., Di, X., and Chen, B. (2018). PointCNN: Convolution on x-transformed points. Adv. Neural Inf. Process. Syst. 31.
Liang, H., Ma, X., Li, S., Gorner, M., Tang, S., Fang, B., et al. (2019). “Pointnetgpd: Detecting grasp configurations from point sets,” in 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20-24 May 2019, 3629–3635.
Liu, Y., Jiang, D., Tao, B., Qi, J., Jiang, G., Yun, J., et al. (2022). Grasping posture of humanoid manipulator based on target shape analysis and force closure. Alexandria Eng. J. 61 (5), 3959–3969. doi:10.1016/j.aej.2021.09.017
Liu, Z., Liu, W., Qin, Y., Xiang, F., Gou, M., Xin, S., et al. (2021). Ocrtoc: A cloud-based competition and benchmark for robotic grasping and manipulation. IEEE Robtics Automation Lett. 7 (1), 486–493. doi:10.1109/lra.2021.3129136
Yang, L., Han, X., Guo, W., and Zhang, Z. (2020). Design of an optoelectronically innervated gripper for rigid-soft interactive grasping. arXiv.
Mahler, J., Malt, M., Satish, V., Danielczuk, M., Derose, B., Mckinely, S., et al. (2019). Learning ambidextrous robot grasping policies. Sci. Robotics 4 (26), eaau4984. doi:10.1126/scirobotics.aau4984
Mahler, J., Matl, M., Liu, X., Li, A., Gealy, D., and Goldberg, K. (2018). “Dex-net 3.0: Computing robust vacuum suction grasp targets in point clouds using a new analytic model and deep learning,” in 2018 IEEE International Conference on robotics and automation (ICRA), Brisbane, Australia, Held 21-25 May 2018, 5620–5627.
Betancourt, M. (2017). A conceptual introduction to Hamiltonian Monte Carlo. arXiv preprint no. 02434.
Mi, T., Que, D., Fang, S., Zhou, Z., Ye, C., Liu, C., et al. (2021). “Tactile grasp stability classification based on graph convolutional networks,” in 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining, China, 15-19 July 2021, 875–880.
Miften, F. S., Diykh, M., Abdulla, S., Siuly, S., Green, J. H., and Deo, R. C. (2021). A new framework for classification of multi-category hand grasps using EMG signals. Artif. Intell. Med. (2017). 112, 102005. doi:10.1016/j.artmed.2020.102005
Miller, A. T., and Allen, P. K. (2004). GraspIt!. IEEE Robtics Automation Mag. 11 (4), 110–122. doi:10.1109/mra.2004.1371616
Mittendorfer, P., and Cheng, G. (2011). Humanoid multimodal tactile-sensing modules. IEEE Trans. Robotics 27 (3), 401–410. doi:10.1109/tro.2011.2106330
Mo, K., Zhu, S., Chang, A. X., Yi, L., Tripathi, S., Guibas, L. J., et al. (2019). “Partnet: A large-scale benchmark for fine-grained and hierarchical part-level 3d object understanding,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, Long Beach, CA, USA, June 15 2019 to June 20 2019, 909–918.
Mousavian, A., Eppner, C., and Fox, D. (2019). “6-dof graspnet: Variational grasp generation for object manipulation,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Korea, Oct. 27 2019 to Nov. 2 2019, 2901–2910.
Murali, A., Li, Y., Gandhi, D., and Gupta, A. (2018). “Learning to grasp without seeing,” in International symposium on experimental robotics (Germany: Springer), 375–386.
Nachum, O., Norouzi, M., Xu, K., and Schuurmans, D. (2017). Bridging the gap between value and policy based reinforcement learning. Adv. Neural Inf. Process. Syst. 30.
Nguyen, V.-D. (1988). Constructing force- closure grasps. Int. J. Robotics Res. 7 (3), 3–16. doi:10.1177/027836498800700301
Kuppuswamy, N., Alspach, A., Uttamchandani, A., Creasey, S., Ikeda, T., and Tedrake, R. (2020).” Soft-bubble grippers for robust and perceptive manipulation,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020- 24 January 2021, 9917–9924.
Pelossof, R., Miller, A., Allen, P., and Jebara, T. (2004). “An SVM learning approach to robotic grasping,” in IEEE International Conference on Robotics and Automation, 2004, New Orleans, LA, USA, April 26 - May 1, 2004, 3512–3518.
Pinto, L., and Gupta, A. (2016). Supersizing self-supervision: Learning to grasp from 50k tries and 700 robot hours,” in 2016 IEEE international conference on robotics and automation (ICRA), Stockholm, Sweden, May 16 - 21, 2016, 3406–3413.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017). “PointNet: Deep learning on point sets for 3d classification and segmentation,” in Proceedings of the IEEE conference on computer vision and pattern recognition, Honolulu, HI, USA, July 21 2017 to July 26 2017, 652–660.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017). PointNet++: Deep hierarchical feature learning on point sets in a metric space. Adv. Neural Inf. Process. Syst. 30.
Quillen, D., Jang, E., Nachum, O., Finn, C., Ibarz, J., and Levine, S. (2018). “Deep reinforcement learning for vision-based robotic grasping: A simulated comparative evaluation of off-policy methods,” in 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, Held 21-25 May 2018, 6284–6291.
Richtsfeld, A., Mörwald, T., Prankl, J., Zillich, M., and Vincze, M. (2012). “Segmentation of unknown objects in indoor environments,” in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura, Algarve, Portugal, October 7-12, 2012, 4791–4796.
Roa, M. A., and Suárez, R. (2015). Grasp quality measures: Review and performance. Aut. Robots 38 (1), 65–88. doi:10.1007/s10514-014-9402-3
Rodriguez, A., Mason, M. T., and Ferry, S. (2012). From caging to grasping. Int. J. Robotics Res. 31 (7), 886–900. doi:10.1177/0278364912442972
Rus, D., and Tolley, M. T. (2015). Design, fabrication and control of soft robots. Nature 521 (7553), 467. doi:10.1038/nature14543
Saito, D., Sasabuchi, K., Wake, N., Takamatsu, J., Koike, H., and Ikeuchi, K. J. (2022). “Task-grasping from human demonstration,” in 2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), Ginowan, Japan, 28-30 November 2022.
Saito, N., Ogata, T., Funabashi, S., Mori, H., Sugano, S. J. I. R., and Letters, A. (2021). How to select and use tools? Act. Percept. target objects using multimodal deep Learn. 6 (2), 2517–2524. doi:10.1109/lra.2021.3062004
Saxena, A., Driemeyer, J., and Ng, A. Y. (2008). Robotic grasping of novel objects using vision. Int. J. Robotics Res. 27 (2), 157–173. doi:10.1177/0278364907087172
Schill, J., Laaksonen, J., Przybylski, M., Kyrki, V., Asfour, T., and Dillmann, R. (2012). “Learning continuous grasp stability for a humanoid robot hand based on tactile sensing,” in 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24 - 27 June 2012, 1901–1906.
She, Y., Liu, S. Q., Yu, P., and Adelson, E. (2020). “Exoskeleton-covered soft finger with vision-based proprioception and tactile sensing,” in 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, May 31 - August 31, 2020, 10075–10081.
Shi, S., Wang, X., and Li, H. (2019). “PointRCNN: 3d object proposal generation and detection from point cloud,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, Long Beach, CA, USA, June 15 2019 to June 20 2019, 770–779.
Shintake, J., Cacucciolo, V., Floreano, D., and Shea, H. (2018). Soft robotic grippers. Adv. Mater. 30 (29), 1707035. doi:10.1002/adma.201707035
Souri, H., Banerjee, H., Jusufi, A., Radacsi, N., Stokes, A. A., Park, I., et al. (2020). Wearable and stretchable strain sensors: Materials, sensing mechanisms, and applications. Adv. Intell. Syst. 2 (8), 2000039. doi:10.1002/aisy.202000039
Stansfield, S. A. (1991). Robotic grasping of unknown objects: A knowledge-based approach. Int. J. Robotics Res. 10 (4), 314–326. doi:10.1177/027836499101000402
Subad, R. A. S. I., Cross, L. B., and Park, K. J. A. M. (2021). Soft Robotic Hands Tactile Sensors Underw. Robotics 2 (2), 356–382.
Tekscan (2014). Force sensors. Available: https://tekscan.com/force-sensors.
ten Pas, A., Gualtieri, M., Saenko, K., and Platt, R. (2017). Grasp pose detection in point clouds. Int. J. Robotics Res. 36 (13-14), 1455–1473. doi:10.1177/0278364917735594
Tenzer, Y., Jentoft, L. P., Howe, R. D. J. I. R., and Magazine, A. (2014). The feel of MEMS barometers: Inexpensive and easily customized tactile array sensors. IEEE Robot. Autom. Mag. 21 (3), 89–95. doi:10.1109/mra.2014.2310152
Hackel, T., Savinov, N., Ladicky, L., Wegner, J. D., Schindler, K., and Pollefeys, M. (2017). Semantic3d.Net: A new large-scale point cloud classification benchmark. ArXiv preprint.
Thomas, J., Loianno, G., Sreenath, K., and Kumar, V. (2014). “Toward image based visual servoing for aerial grasping and perching,” in 2014 IEEE international conference on robotics and automation (ICRA), Hong Kong, China, 31 May - 7 June 2014, 2113–2118.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., and Abbeel, P. (2017). “Domain randomization for transferring deep neural networks from simulation to the real world,” in 2017 IEEE/RSJ international conference on intelligent robots and systems (IROS), Vancouver, BC, Canada, September 24 - 1, 2017, 23–30.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., and Heess, N. (2015). Continuous control with deep reinforcement learning. arXiv preprint no. 02971.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A., Antonoglou, I., Wierstra, D., et al. (2013). Playing atari with deep reinforcement learning. arXiv preprint.
Vo, A.-V., Truong-Hong, L., Laefer, D. F., and Bertolotto, M. (2015). Octree-based region growing for point cloud segmentation. ISPRS J. Photogrammetry Remote Sens. 104, 88–100. doi:10.1016/j.isprsjprs.2015.01.011
Wan, F., Wang, H., Wu, J., Liu, Y., Ge, S., Song, C., et al. (2020). A reconfigurable design for omni-adaptive grasp learning. IEEE Robotics Automation Lett. 5 (3), 4210–4217. doi:10.1109/LRA.2020.2982059
Wan, Q., Adams, R. P., and Howe, R. D. (2016). “Variability and predictability in tactile sensing during grasping,” in 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, May 16 - 21, 2016, 158–164.
Wang, L., Meng, X., Xiang, Y., Fox, D. J. I. R., and Letters, A. (2022). Hierarchical policies for cluttered-scene grasping with latent plans. IEEE Robot. Autom. Lett. 7 (2), 2883–2890. doi:10.1109/lra.2022.3143198
Wang, S., Lambeta, M., Chou, P.-W., and Calandra, R. (2022). Tacto: A fast, flexible, and open-source simulator for high-resolution vision-based tactile sensors. IEEE Robtics Automation Lett. 7 (2), 3930–3937. doi:10.1109/lra.2022.3146945
Wang, X., Kang, H., Zhou, H., Au, W., Chen, C. J. C., and Agriculture, E. i. (2022). Geometry-aware fruit grasping estimation for robotic harvesting in apple orchards. Comput. Electron. Agric. 193, 106716. doi:10.1016/j.compag.2022.106716
Wang, Y., Sun, Y., Liu, Z., Sarma, S. E., Bronstein, M. M., and Solomon, J. M. (2019). Dynamic graph CNN for learning on point clouds. ACM Trans. Graph. 38 (5), 1–12. doi:10.1145/3326362
Weisz, J., and Allen, P. K. (2012). “Pose error robust grasping from contact wrench space metrics,” in 2012 IEEE international conference on robotics and automation, St Paul, Minnesota, USA, Held 14-18 May 2012, 557–562.
Whitesides, G. M. (2018). Soft robotics. J. Angew. Chem. Int. Ed. 57 (16), 4258–4273. doi:10.1002/anie.201800907
Wu, Z., Song, S., Khosla, A., Yu, F., Zhang, L., Tang, X., et al. (2015). “3d shapenets: A deep representation for volumetric shapes,” in Proceedings of the IEEE conference on computer vision and pattern recognition, Boston, Massachusetts, USA, Held 7-12 June 2015, 1912–1920.
Xie, Z., Aneeka, S., Lee, Y., and Zhong, Z. (2017). Study on building efficient airspace through implementation of free route concept in the Manila FIR. Int. J. Adv. Appl. Sci. 4 (12), 10–15. doi:10.21833/ijaas.2017.012.003
Xie, Z., Seng, J. C. Y., and Lim, G. (2022). “AI-enabled soft versatile grasping for high-mixed-low-volume applications with tactile feedbacks,” in 2022 27th International Conference on Automation and Computing (ICAC), Bristol, United Kingdom, September 1-3, 2022, 1–6.
Xie, Z., Somani, N., Tan, Y. J. S., and Seng, J. C. Y. (2021). “Automatic toolpath pattern recommendation for various industrial applications based on deep learning,” in 2021 IEEE/SICE International Symposium on System Integration, Iwaki, Japan, January 11-14, 2021, 60–65.
Xie, Z., and Zhong, Z. W. (2016). Changi airport passenger Volume forecasting based on an artificial neural network. Far East J. Electron. Commun., 2016 163–170. doi:10.17654/ecsv216163
Xie, Z., and Zhong, Z. W. (2016). Unmanned vehicle path optimization based on Markov chain Monte Carlo methods. Appl. Mech. Mater. 829, 133–136. doi:10.4028/www.scientific.net/amm.829.133
Xu, Y., Fan, T., Xu, M., Zeng, L., and Qiao, Y. (2018). “SpideRCNN: Deep learning on point sets with parameterized convolutional filters,” in Proceedings of the European Conference on Computer Vision (ECCV), Tel Aviv, Israel, October 23-27, 2022, 87–102.
Yan, G., Schmitz, A., Funabshi, S., Somlor, S., Tomo, T. P., Sugano, S., et al. (2022). A robotic grasping state perception framework with multi-phase tactile information and ensemble learning. IEEE Robotics Automation Lett. 7, 6822. doi:10.1109/LRA.2022.3151260
Yan, X., Hsu, J., Khansari, M., Bai, Y., Patak, A., Gupta, A., et al. (2018). “Learning 6-dof grasping interaction via deep geometry-aware 3d representations,” in 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, Held 21-25 May 2018, 3766–3773.
Yang, L., Wan, F., Wang, H., Liu, X., Liu, Y., Pan, J., et al. (2020). Rigid-soft interactive learning for robust grasping. IEEE Robot. Autom. Lett. 5 (2), 1720–1727. doi:10.1109/lra.2020.2969932
Yen-Chen, L., Florence, P., Barron, J. T., Rodriguez, A., Isola, P., and Lin, T.-Y. (2021). “inerf: Inverting neural radiance fields for pose estimation,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, September 27 - Oct. 1, 2021, 1323–1330.
Yu, B., Chen, C., Wang, X., Yu, Z., Ma, A., and Liu, B. J. E. S. (2021). Prediction of protein–protein interactions based on elastic net and deep forest. Expert Syst. Appl. 176, 114876. doi:10.1016/j.eswa.2021.114876
Yu, S.-H., Chang, J.-S., and Tsai, C.-H. D. J. S. (2021). Grasp to see—Object classification using flexion glove with support vector machine. Sensors (Basel). 21 (4), 1461. doi:10.3390/s21041461
Yuan, W., Dong, S., and Adelson, E. H. J. S. (2017). Gelsight: High-resolution robot tactile sensors for estimating geometry and force. Sensors (Basel). 17 (12), 2762. doi:10.3390/s17122762
Zhang, Y., Kan, Z., Tse, Y. A., Yang, Y., and Wang, M. Y. (2018). Fingervision tactile sensor design and slip detection using convolutional lstm network. arXiv preprint.
Zaheer, M., Guruganesh, G., Dubey, A., Ainslie, J., Alberti, C., Ontanon, S., et al. (2020). Big bird: Transformers for longer sequences. Adv. Neural Inf. Process. Syst. 33, 17283–17297.
Zhang, H., Peeters, J., Demeester, E., Kellens, K. J. J. o. I., and Systems, R. (2021). A CNN-based grasp planning method for random picking of unknown objects with a vacuum gripper. J. Intell. Robot. Syst. 103 (4), 64–19. doi:10.1007/s10846-021-01518-8
Zhang, Y., Yuan, W., Kan, Z., and Wang, M. Y. (2020). “Towards learning to detect and predict contact events on vision-based tactile sensors,” in Conference on Robot Learning, Nov 14, 2020- Nov 16, 2020, 1395–1404.
Zhen, X., Seng, J. C. Y., and Somani, N. (2019). “Adaptive automatic robot tool path generation based on point cloud projection algorithm,” in 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Zaragoza, Spain, September 10-13, 2019, 341–347.
Zhu, H., Li, Y., and Lin, W. (2020). “Grasping detection network with uncertainty estimation for confidence-driven semi-supervised domain adaptation,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020- 24 January 2021, 9608–9613.
Zimmer, J., Hellebrekers, T., Asfour, T., Majidi, C., and Kroemer, O. (2019). “Predicting grasp success with a soft sensing skin and shape-memory actuated gripper,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, SAR, China, November 3-8, 2019, 7120–7127.
Keywords: versatile grasping, learning policy, high mix and low volume, personalization, tactile sensing, soft gripping
Citation: Xie Z, Liang X and Roberto C (2023) Learning-based robotic grasping: A review. Front. Robot. AI 10:1038658. doi: 10.3389/frobt.2023.1038658
Received: 07 September 2022; Accepted: 16 March 2023;
Published: 04 April 2023.
Edited by:
Tetsuya Ogata, Waseda University, JapanReviewed by:
Gustavo Alfonso Garcia Ricardez, Ritsumeikan University, JapanDimitris Chrysostomou, Aalborg University, Denmark
Copyright © 2023 Xie, Liang and Roberto. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Zhen Xie, eGllX3poZW5AYXJ0Yy5hLXN0YXIuZWR1LnNn