 Maddalena Zuccotto
Maddalena Zuccotto Marco Piccinelli
Marco Piccinelli Alberto Castellini
Alberto Castellini Enrico Marchesini
Enrico Marchesini Alessandro Farinelli
Alessandro Farinelli- Department of Computer Science, University of Verona, Verona, Italy
We address the problem of learning relationships on state variables in Partially Observable Markov Decision Processes (POMDPs) to improve planning performance. Specifically, we focus on Partially Observable Monte Carlo Planning (POMCP) and represent the acquired knowledge with a Markov Random Field (MRF). We propose, in particular, a method for learning these relationships on a robot as POMCP is used to plan future actions. Then, we present an algorithm that deals with cases in which the MRF is used on episodes having unlikely states with respect to the equality relationships represented by the MRF. Our approach acquires information from the agent’s action outcomes to adapt online the MRF if a mismatch is detected between the MRF and the true state. We test this technique on two domains, rocksample, a standard rover exploration task, and a problem of velocity regulation in industrial mobile robotic platforms, showing that the MRF adaptation algorithm improves the planning performance with respect to the standard approach, which does not adapt the MRF online. Finally, a ROS-based architecture is proposed, which allows running the MRF learning, the MRF adaptation, and MRF usage in POMCP on real robotic platforms. In this case, we successfully tested the architecture on a Gazebo simulator of rocksample. A video of the experiments is available in the Supplementary Material, and the code of the ROS-based architecture is available online.
1 Introduction
Planning under uncertainty is a problem of sequential decision-making, which has important applications in artificial intelligence and robotics. Over the last 2 decades, the interest in this topic has grown rapidly due to methodological improvements and the application of these techniques to real-world domains, such as smart buildings, industrial machinery controllers, and mobile robot navigation. Intelligent and autonomous agents have been, in fact, recently employed in complex domains (e.g., search and rescue, warehouse pick-and-place operations, and mobile robot navigation) where the environment is only partially observable. In such domains, it is hard to have complete knowledge of the environment in which the agent acts. In this work, we tackle a specific problem in the context of planning under uncertainty: the problem of learning probabilistic state-variable relationships. Consider, for instance, a warehouse made of aisles with different traffic levels. A robot has to move in the warehouse to accomplish some tasks. The state of the system contains the robot’s position and the configuration of traffic levels in each aisle, but the traffic levels are not known by the robot. It has to discover them using noisy sensors while moving in the warehouse. In this case, each state variable represents the traffic level of an aisle. In the following, state variables refer to the hidden part of the state. Learning state-variable relationships in this context means learning the relationships among the traffic levels of different aisles in the warehouse. The rationale is that if the robot knows that two aisles have the same traffic levels with a high probability, it can improve its planning performance because once it has observed the traffic level of one aisle, it has also acquired some knowledge about the traffic of the other aisle and it can plan considering that knowledge.
Partially Observable Markov Decision Processes (POMDPs) (Sondik, 1978; Kaelbling et al., 1998) are a powerful framework for planning under uncertainty. Markov Decision Processes (MDPs) (Russell and Norvig, 2010) are extended to the case of partially observable environments. To tackle partial observability, they consider all possible states of the (agent-environment) system and assign to each of them a probability value expressing the related likelihood of being the true state. These probabilities, considered as a whole, constitute a probability distribution over states, called belief. A solution for a POMDP is a policy that maps beliefs into actions. The computation of optimal policies is unfeasible in practice (Papadimitriou and Tsitsiklis, 1987). Therefore, much effort was put into developing approximate (Hauskrecht, 2000) and online (Ross et al., 2008) solvers. The most recent approaches mainly rely on the use of point-based value iteration (Spaan and Vlassis, 2004, 2005; Veiga et al., 2014) or Monte-Carlo Tree Search (MCTS) based solvers (Kocsis and Szepesvári, 2006; Browne et al., 2012) to deal with large state spaces. Deep Reinforcement Learning (DRL) approaches are instead used to learn policies directly from observations, without using a model of the environment dynamics (Silver et al., 2016, 2017; Sutton and Barto, 2018). Planning and reinforcement learning methods have also been used together (Leonetti et al., 2016) to allow adaptation to the environment and increased reliability. Among the main MCTS-based solvers (Thrun, 2000; Kocsis and Szepesvári, 2006), a meaningful improvement was obtained by Partially Observable Monte Carlo Planning (POMCP) (Silver and Veness, 2010), a pioneering algorithm that allows applying model-based reinforcement learning to very large state spaces, overcoming the scalability problem that has limited the usage of POMDPs for many years.
We apply the proposed approach for learning state-variable relationships to POMCP. The standard version of this algorithm does not consider any kind of prior knowledge about state-variable relationships. Castellini et al. (2019) proposed an extension of POMCP, which considers these relationships in the form of Constraint Networks (CNs) or Markov Random Fields (MRFs). In that work, the introduction of such knowledge provides an improvement in terms of planning performance, with no additional overhead in terms of time complexity. However, it is assumed to have full knowledge about the CN or MRF containing the state-variable constraints. This knowledge could be provided, for instance, by experts. Herein, instead, we deal with a methodology for learning this knowledge in the form of an MRF. The literature provides some general approaches for learning MRFs, mainly in the context of computer vision (Vuffray et al., 2020; Shah et al., 2021), but they are very general and often time-consuming. On the contrary, our proposed approach is specialized in planning under uncertainty with POMDPs. Hence, it integrates with POMCP without increasing its time complexity. Learning pairwise MRFs, instead of general MRFs, requires a smaller amount of data, which is important in the context of planning, where each learning episode can take a long time. Let us consider, for instance, the case study of the warehouse mentioned above, in which a learning episode could last an entire day of work, having the autonomous robot collect data about traffic levels in the aisles while doing its job.
In this work, we propose three methodological advancements. The first is an algorithm for learning the MRF during the execution of POMCP. The second is implementing a framework to integrate POMCP in ROS, enabling the employment of the MRF learning algorithm on real robotic platforms, with experiments performed on Gazebo simulators of known application domains. The ROS-based architecture allows learning the MRF on real robotic platforms. It comprises three ROS nodes: environment, agent, and planning. The environment node discretizes the real world by exploiting a task-specific representation. The agent node, instead, holds information about odometry and interfaces the ROS-based robotic platform with the environment and the planner. Finally, the planner node runs the learning algorithm. The third advancement is an algorithm called “Adapt” (see Algorithm 2), which deals with cases in which we use the learned MRF in episodes with unlikely state-variable configurations with respect to the joint probability defined by MRF. This algorithm runs when the knowledge provided by the learned MRF does not reflect the true state-variable values. In such cases, the MRF is misleading because it forces the belief probabilities toward configurations of state variables that are discordant from the true state, decreasing the probability of the true state. Thus, the proposed algorithm adapts (i.e., changes) the MRF potentials when the agent acquires knowledge about the true state-variable values and detects a mismatch between the information in the learned MRF and the specific state-variable relationships of the episode to fix the mismatch. The adaptation is performed online, as POMCP works, limiting the performance decrease that could derive from the usage of the MRF when the true state-variable configuration represents an unlikely state.
Our empirical analysis shows that the MRF adaptation method improves the performance obtained using the MRF without adaptation. We tested the algorithm on two domains, namely, rocksample (Smith and Simmons, 2004), a benchmark domain in which an agent moving in a grid has to collect hidden rocks maximizing their values, and velocity regulation (Castellini et al., 2020, 2021), a domain in which a robot traveling on a predefined path has to regulate its velocity to minimize the time to reach the end and the collisions with obstacles in the path. Results show an average improvement of a discounted reward of 6.54% on rocksample and 3.51% on velocity regulation. Finally, we tested the proposed ROS-based architecture on a Gazebo simulator of rocksample. The architecture enables the generation of informative MRFs that produces statistically significant performance improvements. A video showing the evolution of the learning process performed on the ROS-based architecture and the Gazebo simulator is available in the Supplementary Material. The code of the ROS-based architecture is also available online.1
In summary, the main contributions of this work to state of the art are as follows:
• We present a methodology for learning state-variable relationships in the form of an MRF as POMCP is executed on a mobile robot.
• We introduce a framework to integrate POMCP within ROS, targeting ROS-based mobile robots. The architecture supports both the phase in which the MRF is learned and the phase in which it is used.
• We propose an algorithm for adapting the MRF constraints to episodes having unlikely state-variable configurations as new observations are acquired from the environment.
The rest of the study is organized as follows: Section 2 discusses related work. Section 3 describes the rocksample domain used as a running example. Section 4 presents background on POMDP, POMCP, MRF, and the extended POMCP. Section 5 formalizes the learning algorithm and the stopping criterion, describes the ROS-based architecture, and formalizes the MRF adaptation method. Section 6 presents the empirical evaluation of the three contributions. Section 7 draws conclusions and suggests future research directions.
2 Related Work
We identified four research topics in the literature related to our work: probabilistic planning under uncertainty, application of POMCP to robotic platforms, Bayesian adaptive learning and other forms of learning for planning, and MRF learning.
Planning under uncertainty is a crucial task for autonomous and intelligent agents. The first works on POMDP-based planning date back to the seventies (Sondik, 1978). Since then, several methods have been proposed to solve POMDPs (Kaelbling et al., 1998). Recent works highlight the benefits of introducing prior knowledge in problems formalized as POMDPs and solved by POMCP. Castellini et al. (2019) showed that the introduction of prior knowledge about state-variable relationships yields performance improvement. In particular, constraints expressed as MRFs (Murphy, 2012) and CNs (Dechter, 2003) were used. Castellini et al. (2021) showed how mobile robots exploited prior knowledge about task similarities to improve their navigation performance in an obstacle avoidance context. The main limitation of these works regards the requirement to have a full specification of the prior knowledge in advance, but this is not always feasible in practice, especially in complex application domains such as robotic ones. What differentiates our work from Castellini et al. (2021, 2019) is that here we aim to learn the MRF on real robots while acting in the environment and adapt the MRF while it is used. Some other works deal with the problem of adding constraints to planning for improving the performance or scaling to large environments. Lee et al. (2018)used MCTS to generate policies for constrained POMDPs, and Amato and Oliehoek (2015) explored the multi-agent structure of some specific problems to decompose the value function. Instead, we constrain the state space on the basis of state-variable relationships to refine the belief during execution. More precisely, we exploit the learned MRF whose potentials express probabilistic constraints between state-variable values. Other related works in the field of planning under uncertainty concern factored POMDPs and their applications (McAllester and Singh, 1999; Williams and Young, 2007). However, our approach is substantially different as the performance improvement does not derive from a factorization of the POMDP but from the introduction in POMDP of prior knowledge on the domain, represented as an MRF learned from previously collected data.
Regarding the application of POMCP to robotic platforms, we noticed that the planning algorithm has been recently applied to different robotic problems. Goldhoorn et al. (2014) proposed two extensions of POMCP to find-and-follow people that work in the continuous space and plan actions in real time. The Adaptive Highest Belief Continuous Real-Time POMCP Follower presented in that paper aimed to avoid unnecessary turns of the robot in reaching the goal. Our method and ROS-based architecture, instead, aim to learn state-variable relationships and use them in POMCP to improve planning performance. Wang et al. (2020) and Giuliari et al. (2021) used POMCP in the context of Active Visual Search. The authors proposed a method in which the agent starts acting in an unknown environment (i.e., with no information about the area map). Moreover, they present a new belief reinvigoration approach dealing with dynamically growing state space. Lauri and Ritala (2016) used POMCP to control a mobile robot to explore a partially known environment. POMCP was previously integrated with ROS in Wertheim et al. (2020), where a robotic planning platform called ROS-POMDP was presented. It generated the POMDP model of the problem using Performance Level Profiles (PLP) (Brafman et al., 2016) and Relational Dynamic Influence Diagram Language (RDDL) (Sanner, 2010). A two-layer control architecture was instead proposed by Castellini et al. (2021), where the upper layer used an extension of POMCP to tune the velocity of a mobile robot and the lower layer used a standard engine controller to deal with path planning. As explained above, our proposed ROS architecture has a completely different goal, integrating the learning of the MRF with POMCP.
As our goal is to learn some information about the environment and introduce it in POMCP to improve its performance, we also analyzed related works on merging learning and planning, with a specific focus on POMDPs and POMCP. Our work is also related, for instance, to Bayesian adaptive learning in POMDPs (Ross et al., 2011). Katt et al. (2017) presented an elegant method for learning the transition and reward models. They extended the POMCP algorithm to the Bayes-Adaptive case, proposing the Bayes-Adaptive Partially Observable Monte Carlo Planning (BA-POMCP) approach that, however, learns the parameters of the transition model. Our method, instead, learns probabilities of pairs of state variables to have equal values in the hidden part of single states (i.e., we do not consider any information about how the state changes over time). We assume that the hidden part of the state can change only from one episode to another, and each state has a probability of occurring that depends on some (unknown) state-variable probabilistic relationships. We notice that this setting is very common in practice (see the warehouse example in the introduction), but it cannot be naturally encoded in the transition model. The information encoded in our MRF is instead used to initialize and update the belief. For the same reason, our approach also differentiates from Factored BA-POMDP (Katt et al., 2019), which learns a compact model of the dynamics by exploiting the underlying structure of a POMDP, allowing for better scale to large problems. Even this approach deals with knowledge about the transition from one state to another across the steps of execution, and it cannot learn the probability distribution of states considering probabilistic state-variable relationships, as our MRF does. We remark that we do not factorize the POMDP to learn the compact model of dynamics. We are interested in learning probabilistic relationships between state-variable values, which is information affecting the belief and its update over time. For instance, the traffic level in two aisles of a warehouse can be highly correlated. Hence, in an episode, the two aisles may have a high traffic level; in another episode, they may have a low traffic level, but the probability that the two aisles have different traffic levels in an episode is low. This prior knowledge about the state of the environment, represented by the initial belief in POMDPs, can be naturally integrated into POMCP using the MRF, a generative model that directly represents state-variable relationships. Using the MRF, we push the belief probabilities toward states that agree with this knowledge. Methodologies for optimally updating POMDP beliefs to reduce uncertainty on the true state have been proposed by Stachniss et al. (2005), Araya et al. (2010), Veiga (2015), Ognibene et al. (2019), Fischer and Tas (2020), and Thomas et al. (2020). However, these methods mainly focus on introducing the belief into the reward function to allow the definition of information gain goals, otherwise not definable, in the context of POMDP. In order to deal with large environments in practical problems, hierarchical models (Friston, 2008) have been used to extend the POMDP framework (Pineau et al., 2001; Theocharous et al., 2001; Theocharous et al., 2004; Sridharan et al., 2008; Doshi-Velez, 2009). These approaches take advantage of the structure of the problem to decompose the state or the action space, introducing different levels of abstraction to learn much larger models. Moreover, in these works, the computation of optimal policies is performed considering only a subset of the models or an action subset because it is intractable to compute optimal policies for the original problem. However, in our approach, we do not decompose the original problem into sub-tasks. We compute policies considering the entire problem domain. Finally, within the research topic of learning for planning in robotic platforms, Atrash and Pineau (2010) proposed a methodology for learning a model of the user in applications where untrained humans interact and control the robot. In this case, the goal is also to learn a model of the environment.
In the literature, some works proposed approaches to learning arbitrary MRF structures (Besag, 1977; Abbeel et al., 2006; Pletscher et al., 2009; Salakhutdinov, 2009; Vuffray et al., 2020) mainly in the field of computer vision. Due to their generality, these approaches have a higher complexity than our proposed approach, which is specialized in pairwise MRF for representing state-variable relationships inside POMDPs. Shah et al. (2021) also focused on pairwise MRF, but their proposed methodology focused on learning continuous pairwise MRF. The MRFs that we used in our approach are discrete.
3 Rocksample: A Domain for a Running Example
As a running example for explaining the main elements of the proposed contributions, in the rest of the study, we consider rocksample (Smith and Simmons, 2004) a benchmark domain inspired by robotic planetary exploration. In the rocksample, the agent acts in a grid containing valuable and valueless rocks and aims to maximize the value of the collected rocks. The agent does not know the values of the rocks, but it knows only their locations in the grid. Rock values can only be inferred from noisy observations returning the true value of the rock with a probability proportional to the distance between the agent and the observed rock. Knowing in advance the relationships between pairs of rock values (e.g., close rocks could have similar values in real-world applications), the agent can improve its planning performance, collecting more valuable rocks in less time. An example of a probabilistic equality relationship between two state variables X1 and X2 assuming values in {0, 1} is “X1 is equal to X2 with probability 0.9”. In the rocksample, this means that rocks 1 and 2 have the same values with high probability. This kind of relationship cannot be encoded in the transition or observation models because it does not deal with the dynamics of the environment or state observability. Instead, it is a property of state distribution and can be represented by the potential of a pairwise MRF in which nodes correspond to state variables and edges to probabilistic relationships between pairs of state-variable values.
4 Background
In this section, we provide definitions of POMDP, the model used to formalize our planning problem, POMCP, the planning algorithm used to solve the POMDP, MRF, and the structure used to represent state-variable relationships. Finally, we describe the extension of POMCP that considers prior information.
4.1 POMDP
A POMDP (Kaelbling et al., 1998) is defined as a tuple (S, A, O, T, Ω, R, γ), where S is a finite set of states, A is a finite set of actions, Ω is a finite set of observations, T: S × A → Π(S) is the transition model, where Π(S) is the space of probability distribution over states, O: S × A → Π(Ω) is the observation model,
4.2 POMCP
POMCP (Silver and Veness, 2010) is a Monte-Carlo-based algorithm for planning in partially observable environments that combines MCTS (Browne et al., 2012) to compute an approximated policy with a particle filter to represent the belief. The particle filter is initialized with k particles, each representing a state s and following a uniform distribution if no prior knowledge is available about the initial state. At each step, POMCP uses an MCTS to find the best action to perform. The MCTS is generated by iteratively 1) sampling a state from the particle filter and 2) performing a simulation with that state according to the transition and observation models known by the agent. The Upper Confidence bounds applied to the Trees (UCT) strategy (Kocsis and Szepesvári, 2006) is used to balance exploration and exploitation in the simulation phase. The reward of each simulation is backpropagated in the tree to compute the approximated Q-values Q (b, a) for the current belief b and, at the end of the process, the action a with the higher Q-value is selected. After the selected action, a is performed in the real environment, a real observation o is collected, and particles in the belief are updated by keeping only particles that explain the observations. Particle reinvigoration is used if no more particles are available in the particle filter.
4.3 Markov Random Fields
An MRF is an undirected graph where nodes represent variables and edges represent probabilistic relationships between variable values (Bishop, 2006; Murphy, 2012). A potential function is a non-negative function of its arguments representing the relative “compatibility” of different variable assignments. According to the Hammersley–Clifford theorem (Upton and Cook, 2008), the joint probability represented by the MRF can be computed as the product of potential functions over the maximal cliques of the graph, namely,
where x is a variable configuration (e.g., x = (1, 0 … , 0)), θ is a parametrization of the MRF (i.e., a specific set of values for the parameters θ that represent the MRF), C is the set of maximal cliques, ψc (xc|θc) is the potential function, and Z(θ) is the partition function, that is, a normalization factor that can be computed as
Potentials can be represented by a Boltzmann distribution (i.e., exponentials); thus, ψc (yc|θc) = exp (−F (xc|θc)), where F (xc) is the energy function. Restricting the parametrization of the MRF to the edge rather than to the maximal clique of the graph, we obtain pairwise MRF, and, consequently, the product of potentials can be computed by summing the energies of all pairwise relationships. We call E the set of pairwise relationships (i, j) in the MRF, where i, j ∈ 1, … , n, and n is the number of state variables. For instance, given a pair of state variables (Xi, Xj)|(i, j) ∈ E representing two rocks in rocksample, a potential could be
where k is the number of possible values of each variable.
4.4 Extended POMCP
The methodology we use to introduce prior knowledge in POMCP (Castellini et al., 2019) allows for defining probabilistic equality relationships among pairs of state variables through MRFs. The use of the MRF allows factorizing the joint probability function of state-variable configurations, and this probability is used to constrain the state space. Indeed, the MRF defines a probability distribution over states of the POMDP. For instance, in the rocksample domain, the state space is the set of all possible rock value configurations, and the constraints introduced by the MRF allow (probabilistically) reducing the possibility of exploring states that have a small probability of being the true state. The integration of prior knowledge in POMCP is mainly developed in the particle filter initialization and in the reinvigoration phase (Castellini et al., 2019), where the probabilistic constraints stored in the MRF are used to optimize the management of the particle filter representing the agent belief.
To intuitively understand the advantage introduced by the MRF, consider the rocksample environment depicted in Figure 1A, in which the knowledge introduced by the MRF is represented by blue edges between rocks on the grid. The prior knowledge about state-variable relationships is information about equality relationships among the value of different rocks (e.g., with a probability of 0.9, rocks 4 and 5 have the same value). We use this knowledge to “push” the belief probabilities toward states that agree with this information during particle filter initialization. The rationale is that if the agent knows that two rocks (i.e., two state variables) have the same value with high probability (0.9 in Figure 1A), then it can improve its planning performance because once it has observed the value of one rock, it has also acquired some knowledge about the value of the other rock and it can plan accordingly. In the first row of Figure 1B, we show a hypothetical sequence of action performed by the agent with no knowledge about rock values relationships (i.e., standard POMCP), whereas in the second row, we show a hypothetical sequence of action performed by exploiting such knowledge. In both cases, in step 2, the agent performs a sensing action to check the value of rock 1 (yellow colored). In the hypothesis that the agent observes that rock 1 is valuable (green pentagon in the second column), in the first case (i.e., without MRF), it has no information about rocks 2 and 3, whereas in the second case (i.e., with MRF), the agent also has some information about rocks 2 and 3, which are considered valuable with high probability (green pentagons). In step 10, exploiting the acquired knowledge about rock value relationships, the agent with MRF has already sampled rocks from the three rocks, whereas the agent without any knowledge has only sampled rocks 1 and 2. Hence, the agent with the MRF moves faster. We remark that the knowledge in the MRF does not affect the transition model but only the probability distribution over POMDP states. The knowledge stored in an MRF is used to initialize the particle filter (representing the belief) of POMCP and update the particle filter (i.e., the belief) during reinvigoration, a procedure used by POMCP to introduce new particles upon depletion.
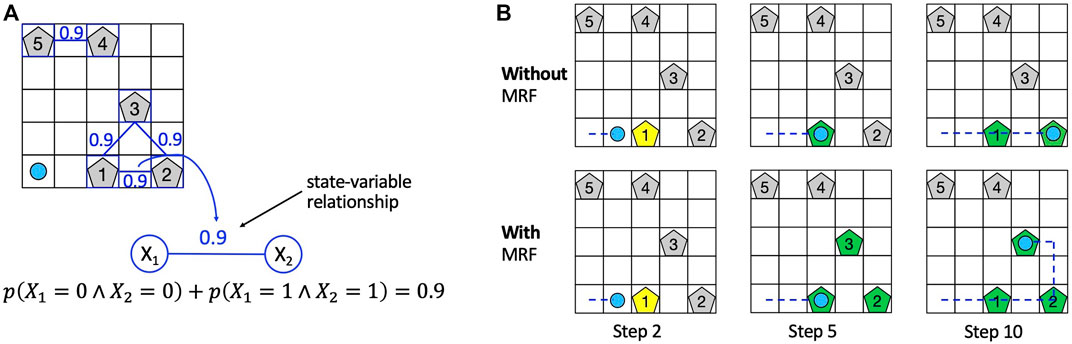
FIGURE 1. (A) Example of usage of the MRF in the rocksample environment. The MRF topology is depicted using rocks as nodes, and equality probability constraints are specified on blue edges between rocks. (B) Effect of the action performed by the agent at steps 2, 5, and 10 using standard POMCP (first row) and the information stored in the MRF (second row). A yellow-colored rock means that the rock is checked by the agent, whereas a green-colored rock represents a rock observed to be valuable by the agent. We consider rocks 1, 2, and 3 valuable in this example.
5 Methodology
In this section, we present a method for learning the MRF during POMCP execution (Section 5.1) that leverages information from the state with the highest probability in the belief and a stopping criterion based on the convergence of MRF potentials (Section 5.2). In Section 5.4, we describe MRF Adaptation; the algorithm that adapts the learned MRF as new knowledge is gathered about the true state-variable configuration and it differs from the information in the MRF. Finally, in Section 5.3, we present the ROS-based architecture designed to have POMCP running within ROS and learn the MRF on real mobile robots.
5.1 MRF Learning
We present a method to learn the MRF during POMCP execution based on the information provided by the belief. More precisely, it employs information from the state having maximum probability. In all our tests, we assume to learn the MRF in NE episodes, where each episode e is composed of a fixed number of steps, but the proposed methodology can simply adapt to the case of episodes with a different number of steps. We assume the hidden part of the state to be static in each episode and changing across episodes. We initialize the MRF with uninformative priors and then update it at the end of each episode. Then, at the end of the learning process, we have an MRF which defines probabilistic constraints on hidden state variables. This information allows for better initializing and updating of the state distribution. Details about the proposed methodology and the used data structures are reported in the following.
5.1.1 Data Structures Used in the Learning Algorithm
Learning the MRF means learning the potentials of pairwise MRF representing state-variable relationships. Given two variables Xi and Xj with k possible values each, we need to learn the potential
In summary, at each episode e, we compute
5.1.2 Learning Algorithm
At each episode e, the vector of state-variable values
Update of equality/inequality counts
Computation of potentials ψ from counts
where (i, j) ∈ E. Namely, we consider only pairs of nodes connected by an edge. For instance, given a pair of state variables (Xi, Xj)|(i, j) ∈ E assuming values in {0, 1}, the potential
Computation of probabilities of state-variable equalities
In other words,
5.2 Stopping Criterion
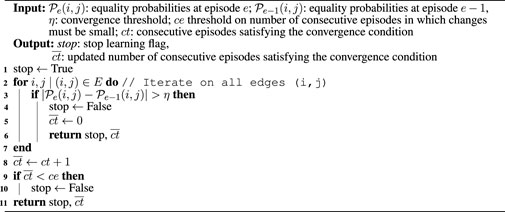
At the end of each learning episode, the MRF is updated, considering the information about the state-variable relationships acquired in the episode. The question we answer in this section is, “when can the learning process be stopped?”. The MRF must provide meaningful knowledge about state-variable relationships to improve planning performance. The methodology we propose analyzes the equality probabilities in the MRF and stops the learning phase when these probabilities converge, namely, when their values have little changes for a few consecutive episodes. More precisely, at the end of each episode e, we check if each equality probability
Algorithm 1. Stopping criterion.
5.3 ROS Architecture for POMCP
We developed a light and straightforward framework that integrates POMCP with ROS, targeting mobile robots. The architecture can also be exploited to execute the MRF learning algorithm and subsequently run the extended POMCP that leverages the constraints in the learned MRF. Optionally, the extended POMCP can be run with MRF adaptation. The architecture can be used with all mobile robotic platforms supporting the ROS Navigation Stack (Marder-Eppstein et al., 2010) and with POMDPs defined following the original POMCP implementation. Additionally, it can be executed in simulation using Gazebo. Since the architecture relies on the ROS network to communicate, the POMCP algorithm is not directly run on the machine mounted on the robotic platform but on an external one, which has more computational power. This results in faster execution of POMCP, with lower power consumption for the mobile robot. The structure of the architecture is illustrated in Figure 2. It contains three main components, namely, the environment, the planner, and the agent, all implemented in C++. In the following paragraphs, each component is described in detail.
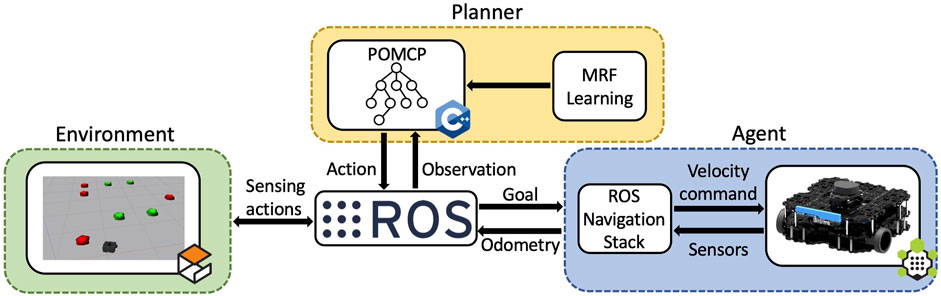
FIGURE 2. ROS architecture for running POMCP on mobile robotic platforms. The three main components are identified by the colored boxes and connected to the same ROS network. The planner supports standard POMCP, extended POMCP, and our proposed approach with MRF adaptation, besides the MRF learning algorithm.
5.3.1 Environment
The environment is a discretization of the real world that exploits a task-specific representation, such as a grid for the rocksample domain.
5.3.2 Planner
The role of the planner is manifold. First, it runs POMCP, from the standard to the extended version. Second, it manages the whole learning process, handling the learning algorithm and keeping track of learned relations to eventually trigger the stopping criterion. When performing the MRF learning process, the node keeps track of the belief, after which each action is performed by the agent. Then, at the end of each episode, the MRF is updated accordingly.
The planner communicates with the ROS network during the Step function call, hence when applying the transition and the observation model of the POMPD. Right after producing the best-desired action, a command is dispatched to the agent, and the planner pauses until the agent feeds back the result.
5.3.3 Agent
The agent node is the interface with the robotic platform. It holds information about the robot’s position through odometry and is responsible for moving the mobile platform to the desired position whenever the planner produces a goal command, which corresponds to a 3D pose in the environment. This is done by exploiting the ROS Navigation Stack, which takes the pose as input and gives a series of target velocities as output. On the contrary, if the planner produces a sensing action, the agent will directly interfere with the environment or sensors mounted on the robotic platform.
5.4 MRF Adaptation
The MRF is learned on several episodes and contains probabilistic information about state-variable relationships. For instance, a probability of 0.9 between state variables X1 and X2, that is,
Algorithm 2. MRF adaptation algorithm.

6 Experiments
In this section, we present the results of our empirical analysis. We perform three different tests on two application domains described in Section 6.1. Section 6.2 defines the measure used to evaluate the performance. Then, we present the results of our test following the order by which we introduced the methodological contributions. First, in Section 6.3, we analyze the performance of the proposed learning algorithm on a C++ simulator of the rocksample environment. The empirical analysis shows the average performance improvement achieved using the learned MRF in the extended POMCP against standard POMCP (in the following, we refer to them as EXT and STD, respectively). Second, in Section 6.4, we show the evaluation of the ROS-based architecture for learning and using the learned MRF. The empirical analysis shows the average performance improvement achieved when the MRF learned on the robotic platform is used in EXT on the same platform. A video is also presented, which shows a complete learning process performed on the Gazebo simulator of rocksample. Third, in Section 6.5, we describe the experiments performed to evaluate the MRF adaptation algorithm. The performance of POMCP with MRF adaptation (ADA, in the following) is compared with that of EXT.
6.1 Domains
We provide full details on the two application domains used in our tests, namely, rocksample (Smith and Simmons, 2004) and velocity regulation (Castellini et al., 2020, 2021).
6.1.1 Rocksample
In the rocksample domain (Smith and Simmons, 2004), an agent moves through a grid containing valuable and valueless rocks placed in a fixed position to maximize the discounted reward collecting rock values. We perform our tests on rocksample (5,8), consisting of a 5 × 5 grid in which we pose eight rocks (Figure 3A). The rock value configuration changes at each episode and is decided a priori to reflect specific constraints. Notation (i, j) identifies the cell in column i and row j on the grid, whereas for rocks, we use indices from 1 to 8. The agent (light blue circle in Figure 3A) knows the rock locations, but it cannot observe rock values (which is the hidden part of the state). These values can only be inferred using observations returned by the environment. The correct result of rock observations, however, is inversely proportional to the distance between the agent position and the rock. At each step, the agent performs one action among moving (up, down, left, right), sensing a rock (i.e., checking its value), or sampling a rock (i.e., collecting its value). The reward obtained by moving and sensing is 0, whereas sampling a rock gives a reward of 10 if the rock is valuable and −10 if it is valueless. Figure 3B shows the true MRF we used to constrain rock values. It presents five edges with the following probability values:
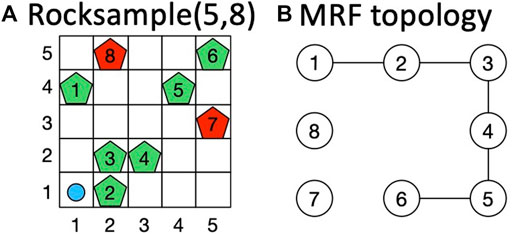
FIGURE 3. (A) Instance of rocksample environment (Zuccotto et al., 2022). (B) True MRF topology used for the domain.
This problem can be formalized as a POMDP. The state is characterized by 1) the agent position on the grid, 2) the rocks’ configuration (hidden), and 3) a flag indicating rocks already sampled. The set of actions is composed of the four moving actions, the sample action, and a sensing action for each rock. Observations have three possible values: 1 for valuable and 2 for valueless rock observation returned by sensing actions and 3 for null observations returned by moving actions. The discount factor used is γ = 0.95. We aim to maximize the information learned about state-variable relationships, so we prevent the agent from exiting the grid.
6.1.2 Velocity Regulation
In the velocity regulation problem (Castellini et al., 2020, 2021), a mobile robot traverses a pre-defined path (Figure 4A) divided into segments gi and subsegments gi,j. Notation (i, j) identifies the position of the robot in the path, where i is the index of the segment and j the index of the subsegment. More precisely, with (i, j), we mean that the agent is at the beginning of subsegment gi,j. Each segment is characterized by a difficulty fi that depends on the obstacle density in the segment. The robot has to traverse the entire path in the shortest possible time, tuning its speed v to avoid collisions with obstacles. Each time the robot collides, a time penalty is given. The robot does not know in advance the real difficulty of the segments (which is the hidden part of the state), and it can only infer their values from the readings of a sensor (Figure 4A). Figure 4B shows the true MRF that we used to constrain segment difficulties. It presents five edges with the following probability values:
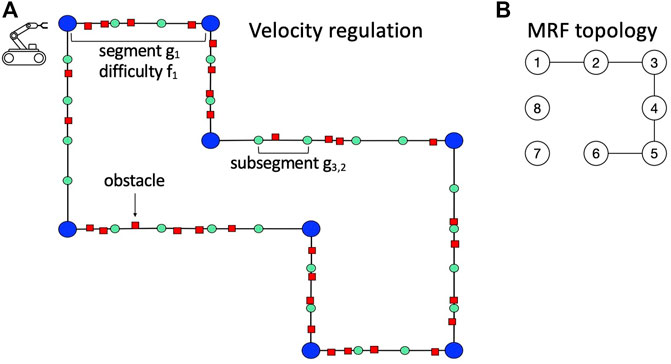
FIGURE 4. (A) Instance of velocity regulation. (B) True MRF topology used for the domain.
This problem can be formalized as a POMDP. The state is characterized by 1) the position of the robot in the path; 2) the (hidden) true configuration of segment difficulties (f1, … , fm), where fj ∈ {L, M, H}, L represents low difficulty, M medium difficulty, H high difficulty; 3) t is the time elapsed from the beginning of the path. The set of actions is composed of the three possible speed values of the robot in a subsegment: slow (S), intermediate (I), or fast (F). Observations are related to subsegment occupancy and robot angular velocity. The occupancy model p (oc|f) probabilistically relates segment difficulties to subsegment occupancy. oc = 0 means that no obstacles are detected in the next subsegment. On the contrary, oc = 1 means that some obstacles are detected. The angular velocity model, instead, provides the probability of angular velocity given segment difficulties, namely, p (av|f). More precisely, av = 0 means that the robot performs a few curves in the subsegment, whereas av = 1 means it performs several curves. In a realistic application on a mobile robot, oc is computed by averaging the values of the laser in front of the robot and applying a threshold to obtain the two binary values. Moreover, we count the actions corresponding to robot turns with angular velocity
The time required to traverse a subsegment depends on the action that the agent performs and the time penalty it receives. Namely, the agent needs one time unit if the action is F (fast speed), two time units if the action is I, and three time units if the action is S. The collision model p (c|f, a) regulates the collision probability; more precisely, c = 0 means no collision and c = 1 means a collision occurs. The reward function here is R = −(t1 + t2), where t1 is the time depending on the agent’s action and t2 is the penalty due to collisions (in our tests t2 = 10). Finally, the discount factor we used is γ = 0.95. The parameters used in our tests are summarized in Tables 1–3.
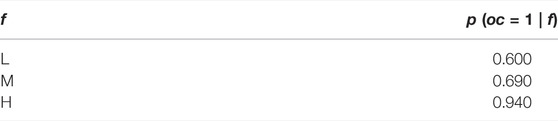
TABLE 1. Main elements of the POMDP model for the collision avoidance problem. Occupancy model p (o|f): probability of subsegment occupancy given segment difficulty.
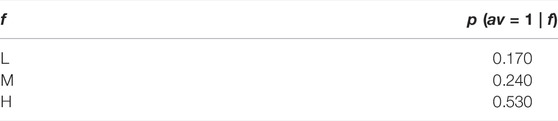
TABLE 2. Main elements of the POMDP model for the collision avoidance problem. Angular velocity model p (av|f).
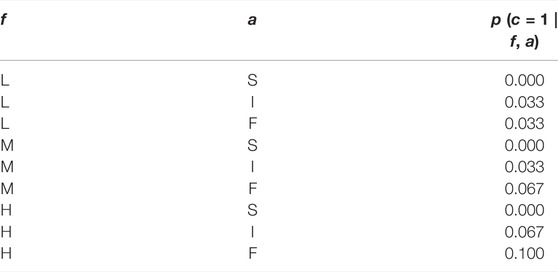
TABLE 3. Main elements of the POMDP model for the collision avoidance problem. Collision model p (c|f, a): collision probability given segment difficulty and action.
6.2 Performance Measure
We introduce the performance measure used to evaluate the planning performance of our methods: difference and average difference in discounted returns. The discounted return of episode e, called ρe, is the sum of the discounted rewards collected in all steps of that episode. The difference between the discounted return obtained using two different methods, such as EXT with the learned MRF and STD or ADA and EXT, on episode e is called Δρe. The average of this difference over all episodes of all runs is called
6.3 Test on MRF Learning
We introduce the experimental setting used in our tests on the MRF learning method and then present our empirical analysis results.
6.3.1 Experimental Setting
We perform tests using the MRF learning algorithm (Section 5.1) with the stopping criterion (Section 5.2) to learn the MRF. Experiments are performed on the rocksample domain described in Section 6.1.1 using a C++ simulator.
In this test, we first select a true MRF (i.e., a set of relationships among rock values; see Figure 5A). Edge probabilities are always set to 0.9 in the true MRF. We perform NR = 10 runs. Hence, we compute 10 MRFs. In each run, we start preparing an empty MRF with the same topology (i.e., set of edges) as the true one (notice that our current method does not learn the topology of the MRF but only the potentials of an MRF with pre-defined topology). We learn the MRF potentials for several episodes determined by the stopping criterion with threshold η = 0.01 and ce = 3. The configuration of rock values changes with each episode satisfying the distribution defined by the true MRF. Then, we evaluate the performance of the learned MRF performing NE = 100 episodes with EXT and STD algorithms, comparing the discounted return of each episode and averaging it over all the runs. In each episode, the agent performs NS = 60 steps. The POMCP always uses 100,000 particles and performs the same number of simulations.
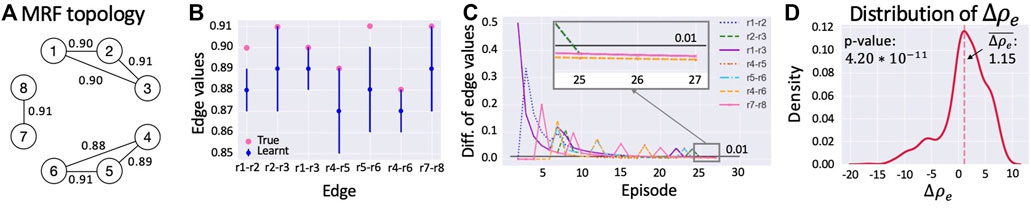
FIGURE 5. (A) True MRF topology with the equality probability constraints on its edges. (B) True MRF and average of the learned MRFs. Pink dots represent the values on the edges of the true MRF, whereas blue dots and lines correspond to the average edge values of the learned MRF and their standard deviations, respectively. (C) Difference of edge probability values during execution of the learning process until the convergence is reached in episode 27. The black line represents the convergence threshold. (D) The density of difference in discounted return from STD.
To prove that the introduction of the learned MRF provides a statistically significant improvement with respect to STD, we show that the average difference
6.3.2 Results
The results we obtained using the C++ simulator are summarized in Figure 5. The main result is represented by the average difference in discounted return,
To explain the motivation for this improvement in Figure 5B, we compare the true and the learned MRF. On the x-axis, we display the edges of the MRF topology, whereas, on the y-axis, we show edge probability values. With pink dots, we represent the values on the true MRF edges (i.e., that from which we sampled the state-variable configurations of the learning episodes), whereas blue dots and lines represent, respectively, the average values of the learned MRF and their standard deviations (where the average is computed over the 10 runs performed in the learning process). The picture shows that the similarity between learned MRFs and the true one is very high. Moreover, Figure 5C depicts the trend of difference in probability values of all edges during a run of the learning process until it is stopped by the proposed criterion. In episode 25, on the x-axis, the difference in equality probabilities of all edges starts to be lower than 0.01, the threshold used in the stopping criterion. Since this condition persists in the next three episodes, the stopping criterion ends the learning phase in episode 27. Similar results with a different stopping criterion have been presented by Zuccotto et al. (2022).
6.4 Tests on the ROS Architecture for MRF Learning
In this section, we test the ROS architecture for MRF learning and present the results of our empirical analysis performed using this architecture.
6.4.1 Experimental Setting
We perform tests using the MRF learning algorithm (Section 5.1) with the stopping criterion (Section 5.2) to learn the MRF on the ROS architecture proposed in Section 5.3. We perform our tests on the open-source multi-robot simulator Gazebo (Koenig and Howard, 2004), in which TurtleBot3 acts in the rocksample domain described in Section 6.1.1.
In this test, we first select a true MRF (Figure 6A). Edge probabilities are always set to the values on the edges of the true MRF topology. We perform NR = 10 runs. In each run, we start preparing an empty MRF with the same topology as the true one. We learn the MRF potentials on the Gazebo environment, running the learning algorithm for several episodes determined by the stopping criterion with threshold η = 0.01 and ce = 3. The configuration of rock values changes in each episode, satisfying the distribution defined by the true MRF shown in Figure 6A. Then, we test the performance of the learned MRF performing NE = 100 episodes with EXT and STD, comparing the discounted return of each episode and averaging it over all the runs. The MRF we used is the average of the 10 MRFs obtained during the learning process. In each episode, the agent performs NS = 60 steps. The POMCP always uses NP = 100,000 particles and performs the same number of simulations.

FIGURE 6. (A) True MRF topology with the equality probability constraints on its edges. (B) True MRF and average of the learned MRFs. Pink dots represent the values on the edges of the true MRF, whereas blue dots and lines correspond to the average edge values of the learned MRF and their standard deviations, respectively. (C) Difference of edge probability values during execution of the learning process until the convergence is reached in episode 23. The black line represents the convergence threshold. (D) Density of difference in discounted return from STD.
To prove that the introduction of the learned MRF provides a statistically significant improvement with respect to STD, we show that the average difference
6.4.2 Results
The results we obtained using the Gazebo simulator are summarized in Figure 6. The main result consists of the average difference of discounted return,
What allows this improvement is visible in Figure 6B in which we compare the true and the learned MRF. On the x-axis, we display the edges of the MRF topology, while on the y-axis, we show edge probability values. Pink dots represent the values on the true MRF edges (i.e., that from which we sampled the state-variable configurations of the learning episodes), whereas blue dots and lines represent, respectively, the average values of the learned MRF and their standard deviations (where the average is computed over the 10 runs performed in the learning process). The picture shows that the learned MRFs are very similar to the true one. Moreover, this also shows that using the proposed learning approach implemented in the ROS architecture allows us to learn accurate MRFs. Figure 6C depicts the trend of difference in probability values of all edges during a run of the learning process until it is stopped by the proposed criterion. In episode 20, on the x-axis, the difference in equality probabilities of all edges starts to be lower than 0.01, the threshold used in the stopping criterion. Because this condition persists in the next three episodes, the stopping criterion ends the learning phase in episode 23.
To further clarify the learning process performed on the ROS-based architecture, we provide a video showing four learning episodes performed by a TurtleBot in the Gazebo simulator of the rocksample domain. Figure 7 shows a snapshot of the video. The mobile robot acting in the Gazebo environment is shown in Figure 7A. When it performs a sensing action on a rock, a question mark appears in the cell containing the rock. This cell becomes green or red if the outcome of the sensing action identifies the rock as valuable or valueless. When the agent performs a sampling action on a rock, the cell in which the rock is posed turns blue to specify that the rock has been collected. Figure 7B shows the true rock value configuration of the episode that satisfies the distribution defined by the true MRF. In Figures 7C,D, we show the edge probability values of the learned MRF updated at the end of episode 23 and the ones of the true MRF we aim at learning. In Figure 7E, we show the evolution of the edge probability values in the learned MRF, and when all the values reach the convergence in Figure 7E, the learning process ends.
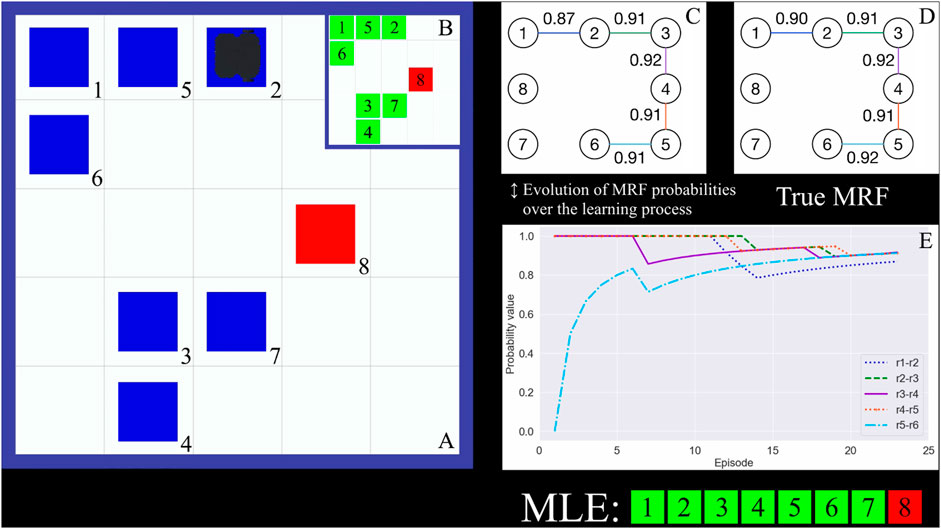
FIGURE 7. (A) Instance of the rocksample environment in which the TurtleBot acts during episode 23. (B) True rock values in episode 23. (C) MRF learned after 23 episodes. (D) True MRF, the one to be learned. (E) Evolution of edge probability values at the end of episode 23. When they converge, the learning process is ended.
6.5 Test on MRF Adaptation
We introduce the experimental setting used in our tests on ADA and then present the results of our empirical analysis.
6.5.1 Experimental Setting
We perform two tests to evaluate the ADA method described in Section 5.4: one is performed on rocksample (5,8) and the second on velocity regulation. In both cases, a C++ simulator of the environment has been used to avoid the slowdown introduced by Gazebo because the physics of the environment is not fundamental to evaluating this algorithm. The goal of our tests is to highlight that by using ADA, we can, on average, improve the performance of the planner over both STD and EXT. This improvement is achieved by limiting the performance decrease generated when the learned or given by expert MRF is used on episodes characterized by unlikely state-variable configurations. In both tests, we perform NR = 10 runs using an MRF that reflects probabilistic equality constraints among state-variable values learned using the MRF learning method of Section 5.1. To evaluate the performance of ADA, we perform NE = 100 episodes using the MRF adaptation approach every time a discrepancy is detected during an episode and NE = 100 episodes using the EXT algorithm. Then, we compare the discounted return of the two methods considering only the episodes in which the MRF adaptation approach has been used and average it over all the runs. In each episode, the agent performs NS = 60 steps in the rocksample domain, whereas in the velocity regulation environment, it performs for NS = 32 steps, namely, the number of subsegments in the path. The configuration of rock values (for the test on rocksample) and segment difficulties (for the test on velocity regulation) changes with each episode satisfying the distribution defined by the true MRF. The POMCP always uses NP = 100,000 particles and performs the same number of simulations. We summarize the parameters used in our tests in Table 4.

TABLE 4. Parameters of tests on ADA.
To prove that the use of the MRF adaptation method in POMCP provides a statistically significant improvement with respect to the use of the MRF without adaptation, we show that the average difference
6.5.2 Results
Figure 8 and Table 5 summarize the results of the two environments.
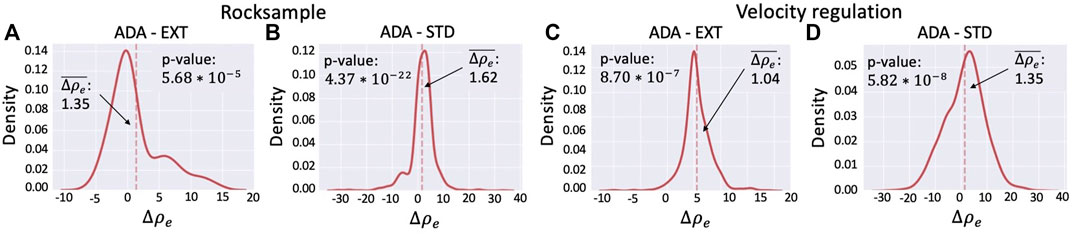
FIGURE 8. Density of difference in discounted return between (A) ADA and EXT on rocksample. (B) ADA and STD on rocksample. (C) ADA and EXT on velocity regulation. (D) ADA and STD on velocity regulation.
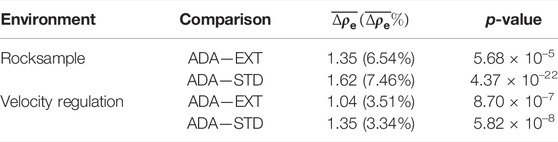
TABLE 5. Performance of ADA.
6.5.2.1 Rocksample
Figure 8A shows the distribution of the differences between the discounted returns obtained using ADA and those obtained using EXT. The distribution is computed considering the 162 episodes (out of 1,000, i.e., 100 episodes for 10 runs) in which the adaptation mechanism was activated (i.e., at least a discrepancy between the learned MRF and the true state has been detected). The average distance is
6.5.2.2 Velocity Regulation
The experiments performed on the velocity regulation domain confirm the positive results obtained on the rocksample. Figure 8C shows the distribution of the differences between the discounted returns obtained using ADA and the ones obtained using EXT. The distribution is computed considering 714 episodes (out of 1,000), that is, the number of episodes in which the adaptation mechanism was activated. The average difference is
Finally, to highlight the different behavior of ADA compared to EXT, in Figure 9A, we show the behavior of ADA (on the left) and EXT (on the right) in a specific episode in which ADA is used and gives a performance improvement. Instead, in Figure 9D, we show the behavior of a specific episode in which the use of ADA yields a decrease in performance. In each figure, we represent on the left grid the actions performed by the agent using ADA, whereas, on the right grid, we represent its action using the learned MRF. To denote the presence of a rock in a specific cell, we use its ID (from 1 to 8). The agent’s starting position is represented by the light blue circle, and blue arrows indicate the path traveled by the agent. In pink-bordered boxes, we indicate the ID of the rock that the agent senses from a cell. With green boxes and red triangles we, respectively, represent the fact that the agent samples a valuable or valueless rock in the corresponding cell. Finally, the orange lightning means that a discrepancy is detected and that the adaptation approach is used as previously described in Section 5.4.
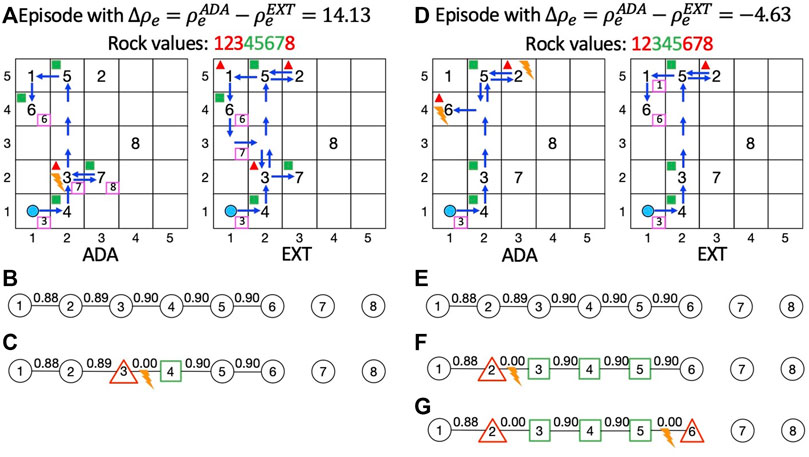
FIGURE 9. (A) Relevant actions of the execution traces of an episode with a positive Δρe between ADA (on the left) and EXT (on the right). (B) Initial MRFs (learnt). (C) Adapted MRF,
Figure 9A shows lighting in cell (2,2) of the left grid. The learned MRF (Figure 9B) expresses a high equality probability between rock 4 and rock 3
In Figure 9D, instead, we depict the most relevant agent actions of an episode in which ADA performs worse than EXT. On the left grid, we show that two discrepancies with the learned MRF (Figure 9E) are detected, respectively, in cell (2,5) and (1,4). Thus, ADA is used twice in this episode. The effect of the first usage of ADA (Figure 9F) consists of discouraging the agent from sampling rock 1, whereas the second (Figure 9G) does not influence any other sampling action because rock 5 has already been sampled and no other state variable has equality relationships with rock 6. In the right grid, the agent performs a sensing action on rock 6 that returns a negative response discouraging the agent from sampling the rock. The different behavior of the agents about rock 6 gives a negative value for Δρe, which is −4.63.
7 Conclusion and Future Work
We presented three main contributions to the literature: a methodology for learning state-variable relationships in POMCP in the form of an MRF, an algorithm for adapting the MRF to the true states encountered while using the MRF in POMCP, and a ROS-based architecture that allows running the MRF learning and the POMCP with the MRF on real robotic platforms. Results show that the MRF adaptation algorithm achieves a statistically significant performance improvement over the use of the MRF without adaptation. Moreover, using the proposed architecture, we managed to learn informative MRFs that yield statistically significant performance improvement over standard POMCP. Our future work will focus on two main directions. From a methodological point of view, an interesting problem concerns integrating the learning process into the context of information gain problems on POMDPs. The goal, in that case, is to tune the exploration-exploitation trade-off considering the learning of the MRF. From an application viewpoint, we aim to extend the proposed ROS architecture to support other kinds of platforms, such as robotic manipulators, to assess our method on different problems that can be formalized as POMDPs.
Data Availability Statement
Code availability: https://github.com/kriato/pomcp_mrf_ros.
The original contributions presented in the study are included in the article/Supplementary Material. Further inquiries can be directed to the corresponding authors.
Author Contributions
MZ and AC: conceptualization, methodology, and writing—review and editing. MP: software, visualization, and writing—review and editing. EM: visualization and writing—review and editing. AF: supervision, project administration, funding acquisition, conceptualization, and writing—review and editing.
Funding
The research has been partially supported by the projects “Dipartimenti di Eccellenza 2018-2022”, funded by the Italian Ministry of Education, Universities and Research (MIUR), and “SAFEPLACE, POR-FESR 2014-2020”, funded by Regione del Veneto.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Supplementary Material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frobt.2022.819107/full#supplementary-material
Footnotes
1https://github.com/kriato/pomcp_mrf_ros
References
Abbeel, P., Koller, D., and Ng, A. Y. (2006). Learning Factor Graphs in Polynomial Time and Sample Complexity. J. Mach. Learn. Res. 7, 1743–1788.
Amato, C., and Oliehoek, F. A. (2015). “Scalable Planning and Learning for Multiagent POMDPs,” in Proceedings of the AAAI15, 1995–2002.
Araya, M., Buffet, O., Thomas, V., and Charpillet, F. (2010). “A Pomdp Extension with Belief-dependent Rewards,” in Advances in Neural Information Processing Systems (Red Hook, NY, USA: Curran Associates, Inc.), Vol. 23.
Atrash, A., and Pineau, J. (2010). “A Bayesian Method for Learning Pomdp Observation Parameters for Robot Interaction Management Systems,” in In The POMDP Practitioners Workshop.
Besag, J. (1977). Efficiency of Pseudolikelihood Estimation for Simple Gaussian Fields. Biometrika 64, 616–618. doi:10.1093/biomet/64.3.616
Bishop, C. M. (2006). Pattern Recognition and Machine Learning (Information Science and Statistics). Berlin, Germany: Springer-Verlag.
Brafman, R. I., Bar-Sinai, M., and Ashkenazi, M. (2016). “Performance Level Profiles: A Formal Language for Describing the Expected Performance of Functional Modules,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Daejeon, South Korea: IEEE Press), 1751–1756. doi:10.1109/IROS.2016.7759280
Browne, C. B., Powley, E., Whitehouse, D., Lucas, S. M., Cowling, P. I., Rohlfshagen, P., et al. (2012). A Survey of Monte Carlo Tree Search Methods. IEEE Trans. Comput. Intell. AI Games 4, 1–43. doi:10.1109/TCIAIG.2012.2186810
Castellini, A., Chalkiadakis, G., and Farinelli, A. (2019). “Influence of State-Variable Constraints on Partially Observable Monte Carlo Planning,” in Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, IJCAI 2019 (ijcai.org), 5540–5546. doi:10.24963/ijcai.2019/769
Castellini, A., Marchesini, E., and Farinelli, A. (2021). Partially Observable Monte Carlo Planning with State Variable Constraints for Mobile Robot Navigation. Eng. Appl. Artif. Intell. 104, 104382. doi:10.1016/j.engappai.2021.104382
Castellini, A., Marchesini, E., Mazzi, G., and Farinelli, A. (2020). “Explaining the Influence of Prior Knowledge on POMCP Policies,” in Multi-Agent Systems and Agreement Technologies - 17th European Conference, EUMAS 2020, and 7th International Conference, AT 2020, Thessaloniki, Greece, September 14-15, 2020, 261–276. Revised Selected Papers (Springer), vol. 12520 of Lecture Notes in Computer Science. doi:10.1007/978-3-030-66412-1_17
Dechter, R. (2003). Constraint Processing. Burlington, Massachusetts: Morgan Kaufmann Publishers Inc.
Doshi-Velez, F. (2009). “The Infinite Partially Observable Markov Decision Process,” in Advances in Neural Information Processing Systems, NeurIPS 2009 (Red Hook, NY, USA: Curran Associates, Inc.), 477–485.
Fischer, J., and Tas, O. S. (2020). “Information Particle Filter Tree: An Online Algorithm for POMDPs with Belief-Based Rewards on Continuous Domains,” in Proceedings of the 37th International Conference on Machine Learning (PMLR), vol. 119 of Proceedings of Machine Learning Research, 3177–3187.
Friston, K. (2008). Hierarchical Models in the Brain. PLoS Comput. Biol. 4, e1000211–24. doi:10.1371/journal.pcbi.1000211
Giuliari, F., Castellini, A., Berra, R., Bue, A. D., Farinelli, A., Cristani, M., et al. (2021). “POMP++: Pomcp-Based Active Visual Search in Unknown Indoor Environments,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Prague, Czech Republic: IEEE). doi:10.1109/IROS51168.2021.9635866
Goldhoorn, A., Garrell, A., Alquézar, R., and Sanfeliu, A. (2014). “Continuous Real Time POMCP to Find-And-Follow People by a Humanoid Service Robot,” in 2014 IEEE-RAS International Conference on Humanoid Robots, 741–747. doi:10.1109/HUMANOIDS.2014.7041445
Hauskrecht, M. (2000). Value-function Approximations for Partially Observable Markov Decision Processes. jair 13, 33–94. doi:10.1613/jair.678
Kaelbling, L. P., Littman, M. L., and Cassandra, A. R. (1998). Planning and Acting in Partially Observable Stochastic Domains. Artif. Intell. 101, 99–134. doi:10.1016/S0004-3702(98)00023-X
Katt, S., Oliehoek, F. A., and Amato, C. (2019). “Bayesian Reinforcement Learning in Factored POMDPs,” in Proceedings of the 18th International Conference on Autonomous Agents and MultiAgent Systems (International Foundation for Autonomous Agents and Multiagent Systems), AAMAS 2019, 7–15.
Katt, S., Oliehoek, F. A., and Amato, C. (2017). “Learning in POMDPs with Monte Carlo Tree Search,” in Proceedings of the 34th International Conference on Machine Learning - Volume 70 (JMLR.org), ICML’17, 1819–1827.
Kocsis, L., and Szepesvári, C. (2006). “Bandit Based Monte-Carlo Planning,” in Proceedings of the 17th European Conference on Machine Learning. ECML 2006, 282–293. doi:10.1007/11871842_29
Koenig, N., and Howard, A. (2004). “Design and Use Paradigms for Gazebo, an Open-Source Multi-Robot Simulator,” in 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566). vol. 3, 2149–2154. doi:10.1109/IROS.2004.1389727
Lauri, M., and Ritala, R. (2016). Planning for Robotic Exploration Based on Forward Simulation. Robotics Aut. Syst. 83, 15–31. doi:10.1016/j.robot.2016.06.008
Lee, J., Kim, G., Poupart, P., and Kim, K. (2018). Monte-carlo Tree Search for Constrained POMDPs. Adv. Neural Inf. Process. Syst. 2018, 7934–7943. doi:10.1155/2018/7689549
Leonetti, M., Iocchi, L., and Stone, P. (2016). A Synthesis of Automated Planning and Reinforcement Learning for Efficient, Robust Decision-Making. Artif. Intell. 241, 103–130. doi:10.1016/j.artint.2016.07.004
Marder-Eppstein, E., Berger, E., Foote, T., Gerkey, B., and Konolige, K. (2010). “The Office Marathon: Robust Navigation in an Indoor Office Environment,” in 2010 IEEE International Conference on Robotics and Automation, 300–307. doi:10.1109/ROBOT.2010.5509725
McAllester, D. A., and Singh, S. (1999). “Approximate Planning for Factored Pomdps Using Belief State Simplification,” in Proceedings of the Fifteenth Conference on Uncertainty in Artificial Intelligence (Morgan Kaufmann Publishers Inc.), UAI’99, 409–416.
Murphy, K. P. (2012). Machine Learning: A Probabilistic Perspective. Cambridge, MA, USA: The MIT Press.
Ognibene, D., Mirante, L., and Marchegiani, L. (2019). “Proactive Intention Recognition for Joint Human-Robot Search and Rescue Missions through Monte-Carlo Planning in Pomdp Environments,” in Social Robotics - 11th International Conference, ICSR 2019, Proceedings (Berlin, Germany: Springer), 332–343. Lecture Notes in Computer Science. doi:10.1007/978-3-030-35888-4_31
Papadimitriou, C. H., and Tsitsiklis, J. N. (1987). The Complexity of Markov Decision Processes. Math. OR 12, 441–450. doi:10.1287/moor.12.3.441
Pineau, J., Roy, N., and Thrun, S. (2001). “A Hierarchical Approach to Pomdp Planning and Execution,” in Workshop on Hierarchy and Memory in Reinforcement Learning (ICML).
Pletscher, P., Ong, C. S., and Buhmann, J. (2009). “Spanning Tree Approximations for Conditional Random Fields,” in Proceedings of the Twelth International Conference on Artificial Intelligence and Statistics (PMLR), vol. 5 of Proceedings of Machine Learning Research, 408–415.
Ross, S., Pineau, J., Chaib-draa, B., and Kreitmann, P. (2011). A Bayesian Approach for Learning and Planning in Partially Observable Markov Decision Processes. J. Mach. Learn. Res. 12, 1729–1770.
Ross, S., Pineau, J., Paquet, S., and Chaib-draa, B. (2008). Online Planning Algorithms for Pomdps. Jair 32, 663–704. doi:10.1613/jair.2567
Russell, S. J., and Norvig, P. (2010). Artificial Intelligence - A Modern Approach. Third International Edition. London, UK: Pearson Education.
Salakhutdinov, R. R. (2009). “Learning in Markov Random Fields Using Tempered Transitions,” in Advances in Neural Information Processing Systems, NeurIPS 2009 (Red Hook, NY, USA: Curran Associates, Inc.), Vol. 22.
Sanner, S. (2010). Relational Dynamic Influence Diagram Language (RDDL): Language Description. Canberra, Australia: Australian National University. Unpublished Manuscript.
Shah, A., Shah, D., and Wornell, G. W. (2021). “On Learning Continuous Pairwise Markov Random Fields,” in The 24th International Conference on Artificial Intelligence and Statistics, AISTATS 2021, April 13-15, 2021, 1153–1161. Virtual Event (PMLR), vol. 130 of Proceedings of Machine Learning Research.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L., van den Driessche, G., et al. (2016). Mastering the Game of Go with Deep Neural Networks and Tree Search. Nature 529, 484–489. doi:10.1038/nature16961
Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou, I., Huang, A., Guez, A., et al. (2017). Mastering the Game of Go without Human Knowledge. Nature 550, 354–359. doi:10.1038/nature24270
Silver, D., and Veness, J. (2010). “Monte-Carlo Planning in Large POMDPs,” in Advances in Neural Information Processing Systems, NeurIPS 2010 (Red Hook, NY, USA: Curran Associates, Inc.), Vol. 23, 2164–2172.
Smith, T., and Simmons, R. (2004). “Heuristic Search Value Iteration for POMDPs,” in Proceedings of the 20th Conference on Uncertainty in Artificial Intelligence (AUAI Press), UAI ’04, 520–527.
Sondik, E. J. (1978). The Optimal Control of Partially Observable Markov Processes over the Infinite Horizon: Discounted Costs. Operations Res. 26, 282–304. doi:10.1287/opre.26.2.282
Spaan, M. T. J., and Spaan, N. (2004). “A Point-Based POMDP Algorithm for Robot Planning,” in Proceedings of the 2004 IEEE International Conference on Robotics and Automation, ICRA 2004, April 26 - May 1, 2004 (New Orleans, LA, USA: IEEE), 2399–2404. doi:10.1109/ROBOT.2004.1307420
Spaan, M. T. J., and Vlassis, N. (2005). Perseus: Randomized Point-Based Value Iteration for Pomdps. jair 24, 195–220. doi:10.1613/jair.1659
Sridharan, M., Wyatt, J. L., and Dearden, R. (2008). “Hippo: Hierarchical Pomdps for Planning Information Processing and Sensing Actions on a Robot,” in International Conference on Automated Planning and Scheduling, (ICAPS) (AAAI), 346–354.
Stachniss, C., Grisetti, G., and Burgard, W. (2005). “Information Gain-Based Exploration Using Rao-Blackwellized Particle Filters,” in Proceedings of Robotics: Science and Systems (RSS). doi:10.15607/rss.2005.i.009
Sutton, R. S., and Barto, A. G. (2018). Reinforcement Learning: An Introduction. Second edn. Cambridge, MA, USA: The MIT Press.
Theocharous, G., Murphy, K., and Kaelbling, L. P. (2004). “Representing Hierarchical Pomdps as Dbns for Multi-Scale Robot Localization,” in Proceedings of the 2004 IEEE International Conference on Robotics and Automation, ICRA 2004, April 26 - May 1, 2004 (New Orleans, LA, USA: IEEE), 1045–1051. doi:10.1109/ROBOT.2004.1307288
Theocharous, G., Rohanimanesh, K., and Maharlevan, S. (2001). “Learning Hierarchical Observable Markov Decision Process Models for Robot Navigation,” in Proceedings 2001 ICRA. IEEE International Conference on Robotics and Automation (Cat. No.01CH37164). vol. 1, 511–516. doi:10.1109/ROBOT.2001.932601
Thomas, V., Hutin, G., and Buffet, O. (2020). “Monte Carlo Information-Oriented Planning,” in ECAI 2020 - 24th European Conference on Artificial Intelligence (Amsterdam, Netherlands: IOS Press), 2378–2385. vol. 325 of Frontiers in Artificial Intelligence and Applications. doi:10.3233/FAIA200368
Thrun, S. (2000). “Monte Carlo POMDPs,” in Advances in Neural Information Processing Systems, NeurIPS 1999 (Cambridge, MA, USA: MIT Press), 1064–1070.
Upton, G., and Cook, I. (2008). “A Dictionary of Statistics,” in Oxford Paperback Reference (Oxford: OUP Oxford). doi:10.1093/acref/9780199541454.001.0001
Veiga, T. S. (2015). Information Gain and Value Function Approximation in Task Planning Using POMDPs. Ph.D. thesis (Lisbon, Portugal: Instituto Superior Técnico, Universidade de Lisboa).
Veiga, T., Spaan, M. T. J., and Lima, P. U. (2014). “Point-Based POMDP Solving with Factored Value Function Approximation,” in AAAI (Palo Alto, California, U.S.: AAAI Press), 2513–2519.
Vuffray, M., Misra, S., and Lokhov, A. Y. (2020). “Efficient Learning of Discrete Graphical Models,” in Advances in Neural Information Processing Systems, NeurIPS 2020.
Wang, Y., Giuliari, F., Berra, R., Castellini, A., Bue, A. D., Farinelli, A., et al. (2020). “POMP: Pomcp-Based Online Motion Planning for Active Visual Search in Indoor Environments,” in 31st British Machine Vision Conference 2020, BMVC 2020, September 7-10, 2020 (Virtual Event, UK: BMVA Press).
Wertheim, O., Brafman, R. I., Shekhar, S., Feiner, T., and Pinsky, I. (2020). “ROS-POMDP – A Platform for Robotics Planning Using PLPs and RDDL in ROS,” in Planning and Robotics Workshop, 30th International Conference on Automated Planning and Scheduling (ICAPS).
Williams, J. D., and Young, S. (2007). Partially Observable Markov Decision Processes for Spoken Dialog Systems. Comput. Speech & Lang. 21, 393–422. doi:10.1016/j.csl.2006.06.008
Keywords: planning under uncertainty, POMCP, POMDP, prior knowledge, Markov Random Fields, learning, mobile robot planning
Citation: Zuccotto M, Piccinelli M, Castellini A, Marchesini E and Farinelli A (2022) Learning State-Variable Relationships in POMCP: A Framework for Mobile Robots. Front. Robot. AI 9:819107. doi: 10.3389/frobt.2022.819107
Received: 20 November 2021; Accepted: 13 June 2022;
Published: 19 July 2022.
Edited by:
Pedro U. Lima, University of Lisbon, PortugalReviewed by:
Dimitri Ognibene, University of Milano-Bicocca, ItalyJennifer Renoux, Örebro University, Sweden
Copyright © 2022 Zuccotto, Piccinelli, Castellini, Marchesini and Farinelli. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Maddalena Zuccotto, bWFkZGFsZW5hLnp1Y2NvdHRvQHVuaXZyLml0; Alberto Castellini, YWxiZXJ0by5jYXN0ZWxsaW5pQHVuaXZyLml0; Alessandro Farinelli, YWxlc3NhbmRyby5mYXJpbmVsbGlAdW5pdnIuaXQ=