 Hayato Dan
Hayato Dan Takeshi Hatanaka
Takeshi Hatanaka Junya Yamauchi
Junya Yamauchi  Takumi Shimizu
Takumi Shimizu Masayuki Fujita
Masayuki Fujita
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Robot. AI , 25 October 2021
Sec. Robotic Control Systems
Volume 8 - 2021 | https://doi.org/10.3389/frobt.2021.740460
This article is part of the Research Topic Safety in Collaborative Robotics and Autonomous Systems View all 9 articles
In this paper, we address a persistent object search and surveillance mission for drone networks equipped with onboard cameras, and present a safe control strategy based on control barrier functions The mission for the object search and surveillance in this paper is defined with two subtasks, persistent search and object surveillance, which should be flexibly switched depending on the situation. Besides, to ensure actual persistency of the mission, we incorporate two additional specifications, safety (collision avoidance) and energy persistency (battery charging), into the mission. To rigorously describe the subtask of persistent search, we present a novel notion of γ-level persistent search and the performance certificate function as a candidate of a time-varying Control Barrier Function. We then design a constraint-based controller by combining the performance certificate function with other CBFs that individually reflect other specifications. In order to manage conflicts among the specifications, the present controller prioritizes individual specifications in the order of safety, energy persistency, and persistent search/object surveillance. The present controller is finally demonstrated through simulation and experiments on a testbed.
Environmental monitoring is one of the key applications of networked multi-robot systems, wherein each robot is expected to deploy over the mission space. To this end, the most promising control technology is coverage control that provides distributed control strategies for enhancing efficiency of information acquisition on the environment (Cortés et al., 2005; Martínez et al., 2007; Renzaglia et al., 2012). The recent technological advances in drone technology make it viable to implement coverage control on drone networks, and many successful results have been reported in the literature (Schwager et al., 2011; Bentz et al., 2018; Funada et al., 2019). These publications consider the scene such that drones with onboard cameras looking down the ground to be monitored move around over the ground as illustrated in Figure 1.
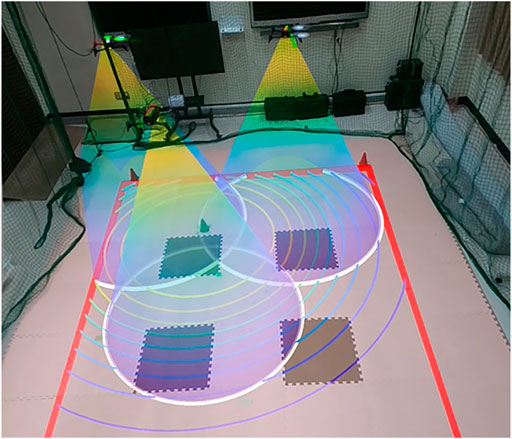
FIGURE 1. A scene of coverage control with drone networks.
Specifications for environmental monitoring vary depending on the application scenarios. In this paper, we address a scene where drones are required to surveil a target object on the environment whose location is initially unknown for the drones. In this scenario, the drones need to first search the object, and then to switch the task to surveillance of the object once it is found. In the phase of searching, the drones are expected to take exploratory actions to patrol the mission space while avoiding too much overlaps of fields of view among drones. Avoiding the overlaps is handled by coverage control but most of the coverage control algorithms lead robots to a stationary configuration rather than persistently taking patrolling motion. Consequently, some subregion may remain uncovered and, accordingly, the drones may fail to find the object especially when the number of drones is not many enough to fully cover the environment as in the scene of Figure 1. To address the issue, the authors presented persistent coverage control schemes in (Hübel et al., 2008; Sugimoto et al., 2015; Kapoutsis et al., 2019), where a notion of information reliability is introduced and so-called density function is dynamically updated according to the reliability. It is then exemplified that the gradient ascent algorithm with the update of the density function generates persistently patrolling motion over the mission space. A similar concept is also presented in (Wang and Wang, 2017), wherein the concept is termed awareness. However, these methodologies do not provide any guarantee on the coverage performance. Meanwhile, Franco et al. (2015) and Palacios-Gasós et al. (2016) address the performance guarantee for the persistent coverage, but a prescribed performance level is not always ensured therein in the presence of the performance decay in time. Kapoutsis et al. (2019) present a persistent coverage scheme not requiring exact models of the environment and robot’s coverage capabilities.
In order to ensure persistency of the mission in practice, it is not enough just to make drones take persistent motion and we have to meet a variety of constraints. For example, we need to certify safety during the mission. Specifically, collision avoidance among drones must be a key in ensuring persistency since drones no longer continue the mission if they collide with each other just once. Moreover, drones are normally driven by batteries with limited storage, and battery exhaustion prevents drones from continuing the mission. We thus need to take account of energy persistency, namely we need to control drones so that they return to charging stations before their batteries are exhausted. These issues have been individually addressed e.g. in (Hussein et al., 2007; Zhu and Martínez, 2013; Bentz et al., 2018; Wang et al., 2020), but a more general framework to flexibly integrate a variety of specifications is needed. Meanwhile, a great deal of recent publications have been devoted to Control Barrier Function (CBF) in order to certify the constraint fulfillment, e.g., to ensure safe operation of multi-robot systems (Ames et al., 2017; Notomista et al., 2018). The CBF has also been employed in coverage control, e.g., in (Egerstedt et al., 2018; Funada et al., 2019). Egerstedt et al. (2018) certifies collision avoidance and maintenance of the energy level in the coverage mission based on the inherent flexibility of CBFs that allows one to integrate various specifications. Funada et al. (2019) manages overlaps of fields of view for drone networks using the CBFs. The paper most closely related to the present paper is Santos et al. (2019), wherein the authors investigate coverage control with a time-varying density function similarly to the persistent coverage control. However, the paper does not give any explicit guarantee of the coverage performance.
In this paper, we present a novel persistent object search and surveillance control with safety certificates for drone networks based on CBFs. We first introduce a new concept of γ-level persistent search as a performance metric for the searching mission in the form of a constraint function. We then formulate constraint functions that describe the control goal for the object surveillance and specifications for safety (collision avoidance) and energy persistency (battery charging). We then formulate inequality constraints to be met by the control input, following the manner of CBFs. A constraint-based controller is then presented, including all of the above inequality constraints. The controller with all of the constraints however may result in issues on infeasibility in online optimization required by the controller. We thus present prioritization among the constraints, where we place priority in the order of safety, energy persistency, and persistent search/object surveillance. Based on the designed priority, we present a novel constraint-based controller that ensures feasibility, where the inequality constraints for persistent search and object surveillance are appropriately switched depending on whether the object is detected or not. The controller is moreover shown to be implemented in a partially distributed manner. We then run simulation of the constraint-based control only with the performance certificate for the persistent search. It is revealed there that the present constraint-based controller maintains the γ-level persistent search during the simulation, while the gradient-based controller in (Sugimoto et al., 2015) occasionally fails to meet the level. Finally, we implement the present control algorithm including not only the constrained-based controller but also an object detection algorithm and takeoff from/landing to the charging stations on a testbed with three drones.
The contributions of this paper are summarized as follows: 1) a novel constraint-based controller is presented so that a prescribed performance level is maintained, differently from the gradient-based persistent coverage algorithm (Hübel et al., 2008; Sugimoto et al., 2015), constraint-based coverage algorithms (Santos et al., 2019), and other related algorithms (Franco et al., 2015; Palacios-Gasós et al., 2016; Wang and Wang, 2017), 2) a novel object search/surveillance problem is formulated, wherein not only the persistent coverage, safety certificates and energy persistency in (Egerstedt et al., 2018; Santos et al., 2019) but also task switches between search and surveillance are integrated, and 3) the algorithm is demonstrated through experiments, where we put the vision data and associated image processing in the loop while other related publications purely examine only robot motion (Schwager et al., 2011; Sugimoto et al., 2015; Egerstedt et al., 2018; Funada et al., 2019; Santos et al., 2019).
A part of the contents in this paper is presented in the conference version (Dan et al., 2020). The incremental contributions relative to (Dan et al., 2020) are: 4) we implement the present partially distributed control architecture on Robot Operating System (ROS), while the experimental setup in (Dan et al., 2020) took a centralized control architecture, 5) owing to the contribution 4), we increase the number of drones from two to three in the experiment, and 6) we newly add simulation to precisely check if the performance is guaranteed in the absence of uncertain factors in real experiments.
In this section, we present the notion of control barrier functions that play a central role in this paper. Let us consider a control affine system formulated as
where
Define the Control Barrier Function (CBF) as below.
Definition 1. Let
for all x in the set
It is shown that if h is a CBF, then the set
We next present an extension of CBF to the case where the set
It is shown that the forward invariance of the set
Definition 2. Given a dynamical system (1) and a set
holds.
Let us consider a 3-D space including n drones to be controlled and a ground modelled by a 2-D plane as illustrated in Figure 2. Without loss of generality, we arrange the world frame Σw so that its origin is on the ground, and its (x, y)-plane is parallel to the ground. The subset of the (x, y)-coordinates on the ground to be monitored is called field, and denoted by a compact set
• Persistent search: Drones patrol the entire field persistently to search the object.
• Object surveillance: Drones keep monitoring the object once the object is found through the persistent search.
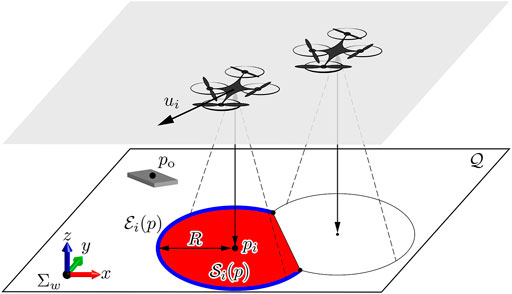
FIGURE 2. Illustration of the problem setting with the field
These subtasks should be appropriately switched depending on whether the object is detected or not.
Let us denote the set of identifiers of n drones by
where ui is the velocity input to be designed. Throughout this paper, we assume that pi is available for control of drone i. Remark that the constant and common altitudes are assumed in order to highlight the main issue to be addressed in this paper. It is actually possible to handle full 3-D motion of the drones, e.g., by taking the formulation of (Funada et al., 2019) at the cost of the computational simplicity.
We next present an external sensor and network models for the drones. Every drone is assumed to be equipped with a single onboard camera that captures the ground. We suppose that the optical axis of each camera is perpendicular to the ground, and that the field of view of camera i is modeled by a circle
for a sensing radius R > 0. Let us now introduce the Voronoi partition of the field
Using the above sets, we define the feasible sensing area
where p is the collection of p1, p2, … , pn. For convenience of the subsequent discussions, we also define the following set called inner edge of the set
We also assume an inter-drone network such that drone i and j can exchange messages if their distance ‖pi − pj‖ is smaller than or equal to 2R. It is then well-known that the set
When Δi = 1 holds, drone i can compute the position of the object po by the detection result and the geometric relation. In real applications, drones need to install an algorithm for detecting the object in the sensing area. See Section 6 for more details on how to detect the object.
In this paper, we implicitly assume that the collection of the fields of view
The function

FIGURE 3. Example of distribution of density function ϕ(q, t). The point q1 is more important point, which need to be monitored than the point q2.
Eq. 6 means that importance of point q monitored by at least one drone decays while that of point q such that
In order to certify the search performance, we formally define the objective of the persistent search as below.
Definition 3. Let a function
where γ is a negative real constant. The drones are then said to achieve γ-level persistent search, if
holds for all t ≥ t0 with a given initial time t0.
Remark that a similar concept is also investigated in (Franco et al., 2015; Palacios-Gasós et al., 2016). It is an extension of the concept to the time-varying objective function.
Let us next consider the object surveillance that should be performed only when Δi takes the value of 1. Define the function
Assuming R > dsur > 0, the object must be inside of the field of view
holds. It is also fully expected that Eq. 8 holds at the time when Δi switches from 0 to 1. The goal of the object surveillance is thus to keep meeting (8) during the period with Δi = 1.
Besides the above subtasks, we need to meet the following specifications in order to ensure persistency in real operations.
• Safety: Drones avoid collisions with each other.
• Energy persistency: Drones return to their charging stations before their batteries run out.
If either of the above two would not be satisfied, drones would no longer continue the search and surveillance mission. In this sense, we should place a higher priority on these specifications than 7) and (8). Remark that the subsequent formulations follow the manner of (Egerstedt et al., 2018; Santos et al., 2019).
In order to formulate the specification for safety, let us first define the function:
where pi,near denotes the position of the drone nearest to drone i within the radius 2R, and davd is selected so that davd > 0. Then, drone i keeps the distance from all other drones greater than davd if
holds. Accordingly, collisions are avoided as long as davd is selected to be large enough and 9) is satisfied.We finally formulate the condition for energy persistency. To this end, the state of charge for drone i, denoted by Ei, is assumed to obey
We then assume that there is a minimum energy level Emin, that is, Ei ≥ Emin must hold during the mission. Also, charging stations are assumed to be located on the ground, where the center of the station assigned to drone i is denoted by
Note that the positive constant kchg should be selected so that
is always satisfied, the state of charge for drone i is never exhausted before arriving at the station.
In summary, two subtasks, persistent search and object surveillance, and two specifications, safety and energy persistency, are formulated in the form of the constraint functions (7)–(10), respectively. The control goal for the persistent object search and surveillance mission is to design the control inputs that satisfy the inequalities (7)–(10).
In this section, we present a constraint-based controller to meet (7)–(10) that are possibly conflicting with each other. To this end, we first focus on Eq. 7 for the γ-level persistent search in Definition 3.
Now, the time derivative of the function hJ along with the trajectories of system 4) is given as
The first term in the right hand side of the equation is rewritten as below according to (Diaz-Mercado et al., 2017) and (6).
The second term can be expressed as
In the same way as (12), hJ is also rewritten as
Combining (11)–(13), we find that
where
Assume that there exists a controller for each agent:
Then, the definition of the forward invariance means γ-level persistent search for any initial condition inside of the set
Let us next consider the satisfaction of Eqs 8–10. It is known that hi,sur, hi,avd and hi,chg are all CBFs (Egerstedt et al., 2018; Notomista et al., 2018; Notomista and Egerstedt, 2021). According to Definition 1, we thus formulate the inequality constraints for ensuring (8)–(10) as:
with locally Lipschitz extended class
all of Eqs 7–10 are satisfied. However, due to the conflicts among the specifications, the controller set
To address the above issue, we prioritize the specifications, which can be realized by relaxing some of the constraints. It is now immediate to see that 7) and 8) are never met in practice if the safety constraint 9) or energy constraint (10) is violated. Accordingly to the insight, we propose the following controller ui = Ki(p, t):
where the weights ϵλ, ϵμ, and ϵν are non-negative scalars. The slack variables λi, μi, νi allow the violations of the associated constraints, and the corresponding weights adjust the penalty on the individual constraint violations. When one of the weights takes a value smaller than other weights, then the controller tries to satisfy the corresponding constraint more strictly than others. When the weight is equal to zero, then the controller treats the constraint as a hard constraint. In this paper, we arrange the weights so that ϵλ ≫ϵμ, ϵν in order to prioritize safety and energy persistency over the control goals of the subtasks. If the weights ϵλ, ϵν, ϵμ are all positive or only one of ϵμ and ϵν is equal to zero, then the optimization problem in (17) is ensured to be feasible as long as (9) and (10) are satisfied at the initial time t0.
We finally show that the present controller is implementable in a (partially) distributed manner. The gradient ∂J(p, t)/∂pi in Eq. 17b is known to be rewritten as follows (Cortés et al., 2005):
where
As mentioned before, the sets
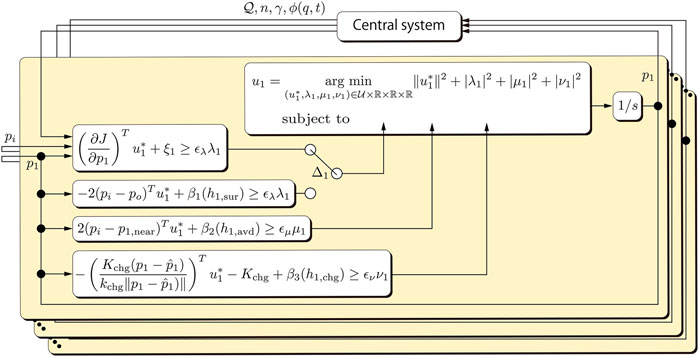
FIGURE 4. Block diagram of the partially distributed control architecture.
Remark 1. The computation in the density update (6) left to the central computer is almost scalable with respect to the number of drones, while solving the optimization problems (17) for all i at a central computer is not scalable. It is thus fully expected that the present partially distributed architecture works even for large-scale drone networks. Nevertheless, some readers may have a concern about using a central computer itself. In many practical applications, however, the communication infrastructure between drones and a central system is established so that a person at the monitoring center monitors the data acquired by the drones. Thus, assuming the computational supports from the central computer must be reasonable in such application scenarios.
Remark 2. Santos et al. (2019) addressed coverage control with a time varying density function using time-varying CBFs, which is close to the present approach. The contribution of this paper relative to (Santos et al., 2019) is as follows. The controller presented in (Santos et al., 2019) is designed based on the distance between the current robot position and the centroid of the Voronoi cell. However, the relation between the metric and the coverage performance quantified by the objective function is not always obvious. On the other hand, the presented controller The switches between subtasks are also not investigated in (Santos et al., 2019).
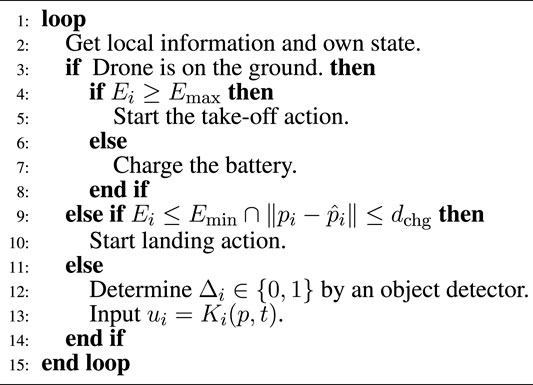
Algorithm 1. Algorithm for drone i.
In this section, we focus only on the persistent search mission while ignoring other objectives, object surveillance, safety, and energy persistency. We then verify through simulation that the constrained-based controller achieves the performance specified by the parameter γ. To this end, we employ the simplified version of the controller (17):
In the simulation, the field is set to
Figure 5 shows the time responses of the performance function J for the above two methods, where the blue line shows the performance by the gradient-based controller (Sugimoto et al., 2015), the green line that by (Santos et al., 2019) the yellow line that by the constraint-based controller (18), and the red line illustrates the prescribed performance level γ = − 4.0. We see that the gradient-based controller (Sugimoto et al., 2015) and (Santos et al., 2019) occasionally fail to meet the desired performance level, namely the value of performance function J goes below γ. On the other hand, the constraint-based controller 18) successfully keeps the performance above the level γ = − 4.0. Figure 6 illustrates the results for n = 5, wherein we take γ = − 2.5 to highlight the differences between the present controller and the other two. It is immediate to see that the above insights from Figure 5 are also applied to this case. It is now to be noted that, if we remove the density update 6) from consideration, the controller in (Santos et al., 2019) is itself fully distributed, while the present constraint-based controller still needs partial support from a central computer. However, in the present scene, 6) needs to be executed in a central computed regardless of the control algorithm, as mentioned in Section 4.
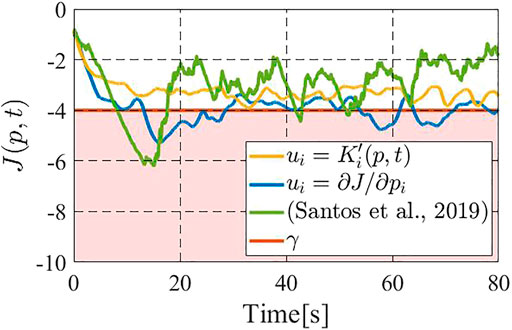
FIGURE 5. Comparison on the value of the performance function (with three drones): the gradient-based controller (blue) and (Santos et al., 2019) (green) do not meet J ≥ γ, while the constraint-based controller (yellow) satisfies.
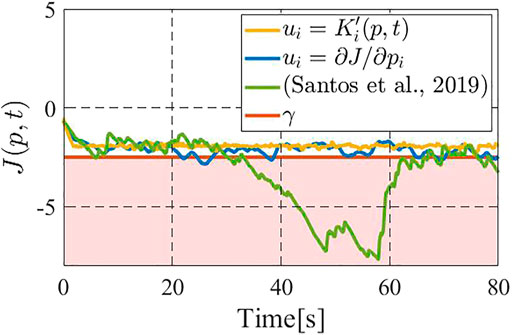
FIGURE 6. Comparison on the value of the performance function with five drones among the gradient-based controller (blue) (Santos et al., 2019) (green), and the present the constraint-based controller (yellow).
Figure 7 shows the snapshot of simulation in Figure 5 at t = 17 s, where the left and right figure correspond to the gradient-based controller (Sugimoto et al., 2015) and the constraint-based controller (18), respectively. The color map on the field illustrates the value of the density function ϕ(q, t), where the yellow region has high density while the dark blue means low density. We immediately see from the definition of J in Eq. 5 that low density is directly linked with a good search performance. In the left, some areas remain yellow while, in the right, the entire area is almost filled with blue. It is thus concluded that the constraint-based controller 18) achieves a better performance than the gradient-based controller.
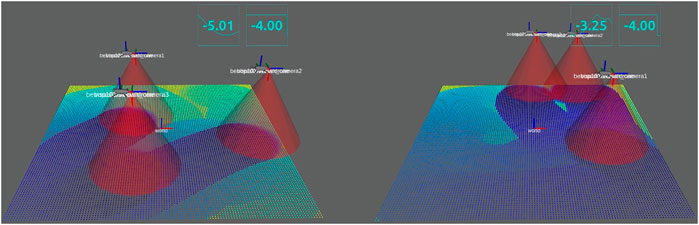
FIGURE 7. Snapshots at time t =17 s: the constraint-based controller (right) almost fills the entire field with blue, while some regions remain yellow for the gradient-based controller (left).
Remark that if we take a larger gain κ, then the gradient-based controller tends to achieve a better performance and may even meet the prescribed performance level. Even through that, the performance level is not rigorously ensured and, more importantly, it is hard to know an appropriate gain for given environment and parameters in advance. Of course, taking a too large feedback gain may result in unstable motion in real implementation.
It is finally to be noted that the optimization problem in the controller has never been infeasible, namely the gradient
In this section, we demonstrate Algorithm 1 through experiments on a testbed. We set the field
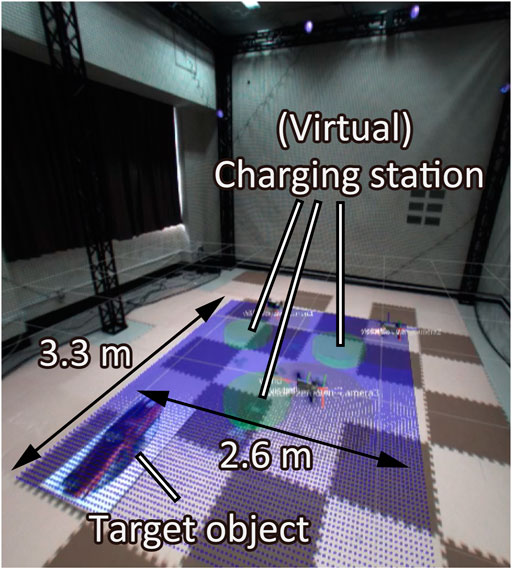
FIGURE 8. Experiment room: Overview of the environment.
A local controller for each drone is designed so that its altitude is maintained to be 1.2 m and the body is parallel to the ground. When a drone takes the above desirable states, the field of view of the camera is given by about 1.8 m × 1.2 m rectangle as illustrated in Figure 9. In order to compensate the gap from the circular field of view assumed in the previous sections, we set the red circle in Figure 9 with radius 0.6 m inside of the rectangle while accepting conservatism. Also, the optical axis of the camera is not perpendicular to the body, which differs from the model in Figure 2. In order to fill the gap, the center of the circle is shifted from that of the rectangle. This shift does not matter in practice since the object position is also shifted in the sequel. Generalization of the algorithm that does not require such remedies is left as a future work.
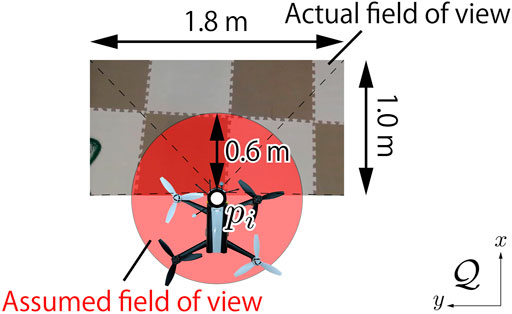
FIGURE 9. Definition of the field of view for a drone.
The schematic of the testbed is illustrated in Figure 10 which consists of a desktop computer, three laptops, and a motion capture system (OptiTrack) as well as drones. The motion capture measures the positions of drones at every 4.17 ms (240 fps). The desktop computer (PC0) receives all drones’ positions from the motion capture system, updates the value of density function ϕ(q, t), and publishes the positions and the field information such as field size (tensorflow object detector (https://github.com/osrf/tensorflow_object_detector). The object position is computed by the detection result and the geometric relation, and then shifted to compensate the gap between the rectangle and red circle in Figure 9. The laptop then calculates the inputs ui based on the information published by PC0 and the detected object position by Python script. The quadratic program in Eq. 17 is solved in the script using CVXOPT. The input is converted into a suitable format for communication and sent to the drone. Note that each distributed controller needs the positions of not all drones but only the neighboring drones within the radius 2R = 1.2 m. To mimic the real distributed computation, each laptop deletes drones’ positions not within the radius, and does not use the information at all in the program.
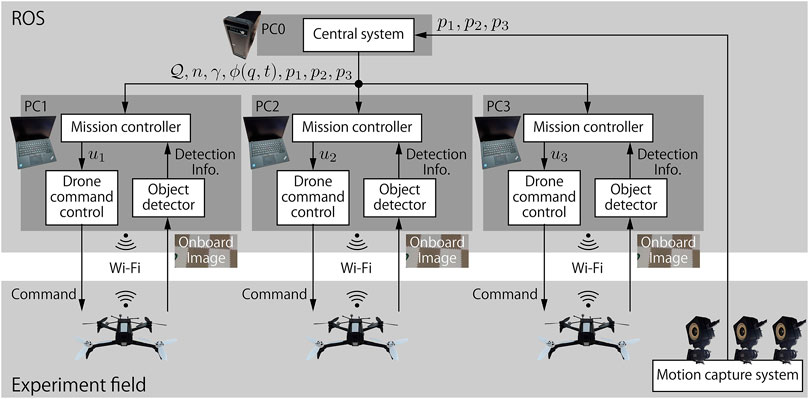
FIGURE 10. Experiment systems: Schematic description of the system.
The weight of constraints are given as follows:
This means that the primary constraint is safety, namely the collision avoidance, and it is treated as a hard constraint. The secondary is the battery charging, and tertiary is the subtasks: the persistent search and object surveillance, which are treated as soft constraints. For the safety reason, we restrict the speed of drones by setting input space

TABLE 1. Parameter setting.
The snapshots of the experiment are shown in Figure 11. When the object is not detected and all drones’ batteries have enough states of charge, drones run the persistent search and move around over the plane
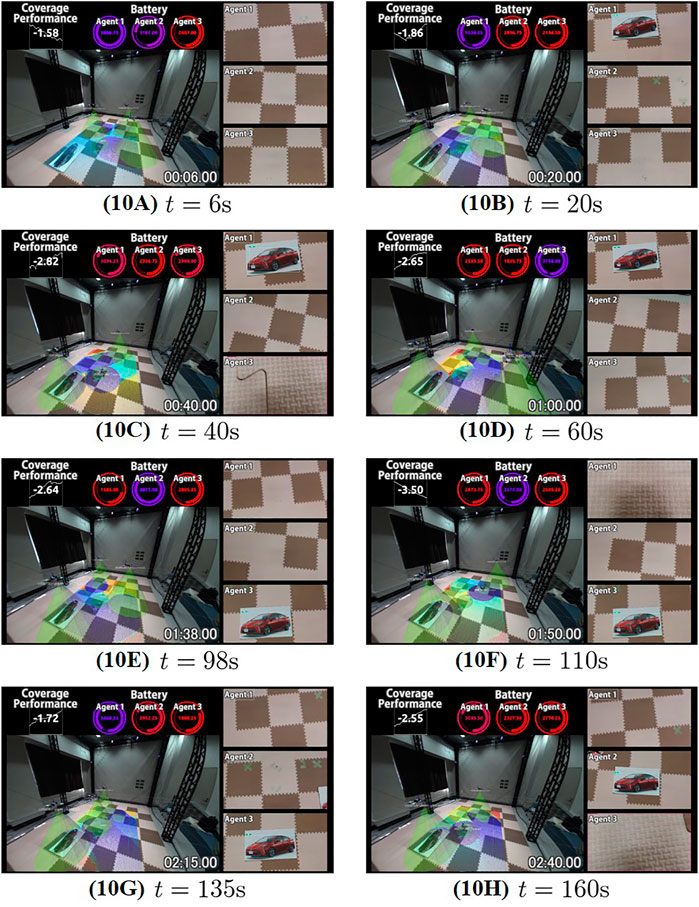
FIGURE 11. Snapshots of the experiment, where the plane
Let us next confirm the function of the secondary constraint for the energy persistency. The time series of the (virtual) states of charge are shown in Figure 12. We see from the figure that the drones successfully return to the charging station, and recharge the battery before their batteries reach the minimum limit Emin shown by dashed line with slight exception at around t = 225s. Finally, Figure 13 shows the time series data of the value of the function J. We see that the drones frequently failed to satisfy the performance level γ. This is fully reasonable since the collision avoidance, energy persistency and object surveillance are prioritized over the subtasks of persistent search. We see that the performance level is high in the early stage, where all drones engage in the persistent search as seen in Figure 11A. The performance decreases at around t = 20s since a drone switches to object surveillance (Figure 11B). The performance further decays around t = 30–40s since a drone goes back to the charging station and only one drone engages in persistent search (Figure 11C). Once the drone restarts persistent search (Figure 11D), the performance improves during t = 60–80 but it again decays at around t = 80s since another drone returns to the station. It is thus concluded that the present prioritization works as expected, and the present algorithm autonomously completes the overall mission.
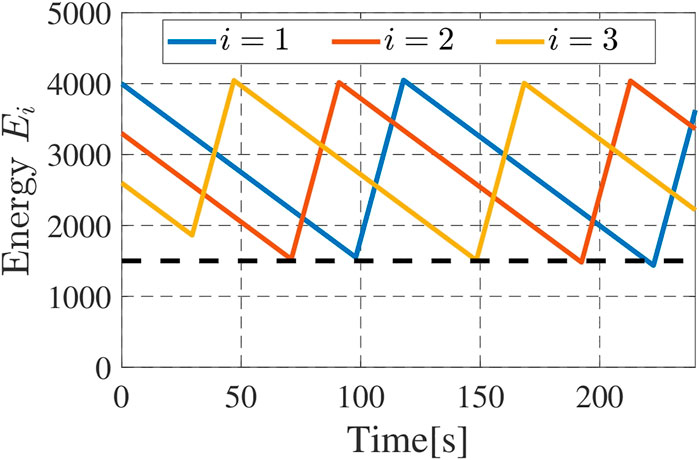
FIGURE 12. Time series of Ei. Each drone recharges its battery before Ei reaches the minimum limit.
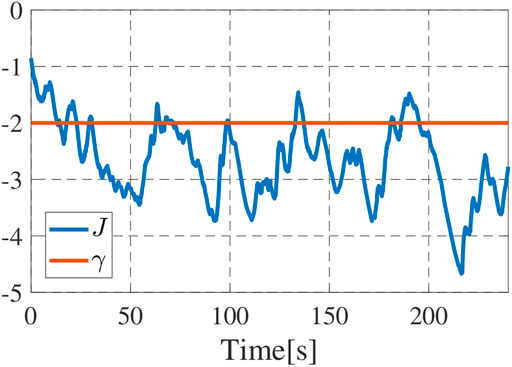
FIGURE 13. Time series of J, where the blue line denotes the function J and red line does its target level γ.
In this paper, we have investigated a persistent object search and surveillance mission with safety certificates for drone networks. To address the issue, the control goals for the persistent object search and surveillance together with certificates for safety and energy persistency have been rigorously formulated in the form of constraint functions. To design a controller that fulfills the constraints, we have derived inequality constraints to be met by the control input, following the manner of CBFs. We then have presented a constraint-based controller that appropriately prioritizes constraints to manage conflicts among specifications. The simulation study has revealed that the constraint-based controller certifies a prescribed performance level for the searching mission, differently from the authors’ antecessor and other related publications. The present algorithm has also been demonstrated through experiments. In the experiment, it has been confirmed that safety and energy persistency are successfully guaranteed by the controller even in the presence of a variety of uncertain factors in the real physical world, not in the ideal mathematical models. We have also observed through experiments that the present prioritization of the specifications works as expected, namely drones prioritize safety and energy persistency at the cost of the control goals for persistent object search and surveillance.
The original contributions presented in the study are included in the article/Supplementary Material, further inquiries can be directed to the corresponding author.
All authors listed have made a substantial, direct, and intellectual contribution to the work and approved it for publication.
Japan Society for the Promotion of Science Grant-in-Aid for Scientific Research (C) 21K04104
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
The reviewer NC declared a past co-authorship with one of the authors MF to the handling Editor.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors, and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The authors would like to thank Tokyo Tech Academy for Super Smart Society for their supports to build the experimental testbed.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frobt.2021.740460/full#supplementary-material
Supplementary Material | Experimental movie of the present constraint-based controller.
Ames, A. D., Xu, X., Grizzle, J. W., and Tabuada, P. (2017). Control Barrier Function Based Quadratic Programs for Safety Critical Systems. IEEE Trans. Automat. Contr. 62, 3861–3876. doi:10.1109/TAC.2016.2638961
Bentz, W., Hoang, T., Bayasgalan, E., and Panagou, D. (2018). Complete 3-D Dynamic Coverage in Energy-Constrained Multi-UAV Sensor Networks. Auton. Robot 42, 825–851. doi:10.1007/s10514-017-9661-x
Cortés, J., Martínez, S., and Bullo, F. (2005). Spatially-distributed Coverage Optimization and Control with Limited-Range Interactions. Esaim: Cocv 11, 691–719. doi:10.1051/cocv:2005024
Dan, H., Yamauchi, J., Hatanaka, T., and Fujita, M. (2020). “Control Barrier Function-Based Persistent Coverage with Performance Guarantee and Application to Object Search Scenario,” in Proceedings of IEEE Conference on Control Technology and Applications, Montreal, QC, August 24–26, 2020, 640–647. doi:10.1109/CCTA41146.2020.9206273
Diaz-Mercado, Y., Lee, S. G., and Egerstedt, M. (2017). “Human-Swarm Interactions via Coverage of Time-Varying Densities,” in Trends in Control and Decision-Making for Human–Robot Collaboration Systems. Editors Y. Wang, and F. Zhang (Cham, Switzerland: Springer International Publishing), 357–385. doi:10.1007/978-3-319-40533-9_15
Egerstedt, M., Pauli, J. N., Notomista, G., and Hutchinson, S. (2018). Robot Ecology: Constraint-Based Control Design for Long Duration Autonomy. Annu. Rev. Control. 46, 1–7. doi:10.1016/j.arcontrol.2018.09.006
Franco, C., Stipanović, D. M., López-Nicolás, G., Sagüés, C., and Llorente, S. (2015). Persistent Coverage Control for a Team of Agents with Collision Avoidance. Eur. J. Control. 22, 30–45. doi:10.1016/j.ejcon.2014.12.001
Funada, R., Santos, M., Yamauchi, J., Hatanaka, T., Fujita, M., and Egerstedt, M. (2019). “Visual Coverage Control for Teams of Quadcopters via Control Barrier Functions,” in Proceedings of 2019 International Conference on Robotics and Automation, Montreal, QC, May 20–24, 2019, 3010–3016. doi:10.1109/ICRA.2019.8793477
Hübel, N., Hirche, S., Gusrialdi, A., Hatanaka, T., Fujita, M., and Sawodny, O. (2008). Coverage Control with Information Decay in Dynamic Environments. IFAC Proc. Volumes 41, 4180–4185. doi:10.3182/20080706-5-kr-1001.00703
Hussein, I. I., Stipanovic, D. M., and Yue Wang, Y. (2007). “Reliable Coverage Control Using Heterogeneous Vehicles,” in Proceedings of 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, December 12–14, 2007, 6142–6147. doi:10.1109/CDC.2007.4434510
Kapoutsis, A. C., Chatzichristofis, S. A., and Kosmatopoulos, E. B. (2019). A Distributed, Plug-N-Play Algorithm for Multi-Robot Applications with A Priori Non-computable Objective Functions. Int. J. Robotics Res. 38, 813–832. doi:10.1177/0278364919845054
Lindemann, L., and Dimarogonas, D. V. (2019). Control Barrier Functions for Multi-Agent Systems under Conflicting Local Signal Temporal Logic Tasks. IEEE Control. Syst. Lett. 3, 757–762. doi:10.1109/LCSYS.2019.2917975
Martínez, S., Cortés, J., and Bullo, F. (2007). Motion Coordination with Distributed Information. IEEE Control. Syst. 27, 75–88. doi:10.1109/MCS.2007.384124
Notomista, G., and Egerstedt, M. (2021). Persistification of Robotic Tasks. IEEE Trans. Contr. Syst. Technol. 29, 756–767. doi:10.1109/TCST.2020.2978913
Notomista, G., Ruf, S. F., and Egerstedt, M. (2018). Persistification of Robotic Tasks Using Control Barrier Functions. IEEE Robot. Autom. Lett. 3, 758–763. doi:10.1109/LRA.2018.2789848
Palacios-Gasós, J. M., Montijano, E., Sagüés, C., and Llorente, S. (2016). Distributed Coverage Estimation and Control for Multirobot Persistent Tasks. IEEE Trans. Robot. 32, 1444–1460. doi:10.1109/TRO.2016.2602383
Renzaglia, A., Doitsidis, L., Martinelli, A., and Kosmatopoulos, E. B. (2012). Multi-robot Three-Dimensional Coverage of Unknown Areas. Int. J. Robotics Res. 31, 738–752. doi:10.1177/0278364912439332
Santos, M., Mayya, S., Notomista, G., and Egerstedt, M. (2019). “Decentralized Minimum-Energy Coverage Control for Time-Varying Density Functions,” in Proceedings of 2019 International Symposium on Multi-Robot and Multi-Agent Systems, New Brunswick, NJ, August 22–23, 2019, 155–161. doi:10.1109/MRS.2019.8901076
Schwager, M., Julian, B. J., Angermann, M., and Rus, D. (2011). Eyes in the Sky: Decentralized Control for the Deployment of Robotic Camera Networks. Proc. IEEE 99, 1541–1561. doi:10.1109/JPROC.2011.2158377
Sugimoto, K., Hatanaka, T., Fujita, M., and Huebel, N. (2015). “Experimental Study on Persistent Coverage Control with Information Decay,” in Proceedings of 2015 54th Annual Conference of the Society of Instrument and Control Engineers of Japan, Hangzhou, China, July 28–30, 2015, 164–169. doi:10.1109/SICE.2015.7285343
Wang, Y.-W., Zhao, M.-J., Yang, W., Zhou, N., and Cassandras, C. G. (2020). Collision-free Trajectory Design for 2D Persistent Monitoring Using Second-Order Agents. IEEE Trans. Control. Netw. Syst. 7, 545–557. doi:10.1109/TCNS.2019.2954970
Wang, Y., and Wang, L. (2017). “Awareness Coverage Control in Unknown Environments Using Heterogeneous Multi-Robot Systems,” in Cooperative Control of Multi-Agent Systems. Editors Y. Wang, E. Garcia, D. Casbeer, and F. Zhang (Hoboken, NJ: John Wiley & Sons), 265–290. doi:10.1002/9781119266235.ch10
Keywords: search and surveillance, drone networks, safe control, persistency, control barrier functions, distributed control, coverage control
Citation: Dan H, Hatanaka T, Yamauchi J, Shimizu T and Fujita M (2021) Persistent Object Search and Surveillance Control With Safety Certificates for Drone Networks Based on Control Barrier Functions. Front. Robot. AI 8:740460. doi: 10.3389/frobt.2021.740460
Received: 13 July 2021; Accepted: 01 October 2021;
Published: 25 October 2021.
Edited by:
Ashwin Dani, University of Connecticut, United StatesReviewed by:
Elias B. Kosmatopoulos, Democritus University of Thrace, GreeceCopyright © 2021 Dan, Hatanaka, Yamauchi , Shimizu and Fujita. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Takeshi Hatanaka, aGF0YW5ha2FAc2MuZS50aXRlY2guYWMuanA=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.