Design of an Inkjet-Printed Rotary Bellows Actuator and Simulation of its Time-Dependent Deformation Behavior
 Gabriel Dämmer
Gabriel Dämmer Michael Lackner1
Michael Lackner1 Zoltán Major
Zoltán Major- 1Institute of Polymer Product Engineering, Johannes Kepler University Linz, Linz, Austria
- 2Advanced Development Control and Robotics, Festo SE and Co. KG, Esslingen, Germany
A Corrigendum on
Design of an Inkjet-Printed Rotary Bellows Actuator and Simulation of Its Time-Dependent Deformation Behavior
by Dämmer, G., Lackner, M., Laicher, S., Neumann, R., and Major, Z. (2021). Front. Robot. AI 8:663158. doi:10.3389/frobt.2021.663158
In the original article, there was a mistake in Figure 13 as published. The angles were too small by a factor of 10 in Figure 13. However, the angular values in the text and all other figures are correct. The corrected Figure 13 appears below.
FIGURE 13
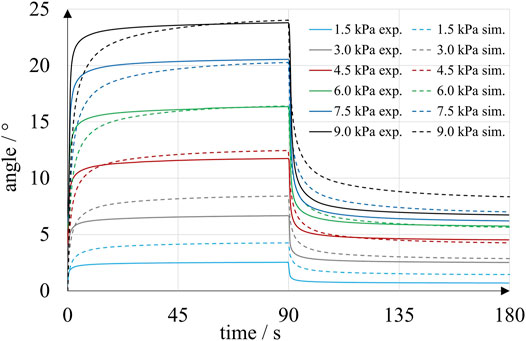
FIGURE 13. Time-dependent angular position of inkjet-printed rotary bellows actuators in experiments (solid lines) and simulation (dashed lines). Each solid curve is an average of five experiments with four bellows chambers at a particular pressure level.
The authors apologize for this error and state that this does not change the scientific conclusions of the article in any way. The original article has been updated.
Keywords: bellow actuator, printed robotics, design for additive manufacture, multi-material 3D printing, soft pneumatic actuator, time-dependent materials, printed elastomer, PolyJet elastomers
Citation: Dämmer G, Lackner M, Laicher S, Neumann R and Major Z (2021) Corrigendum: Design of an Inkjet-Printed Rotary Bellows Actuator and Simulation of its Time-Dependent Deformation Behavior. Front. Robot. AI 8:729549. doi: 10.3389/frobt.2021.729549
Received: 23 June 2021; Accepted: 24 June 2021;
Published: 09 July 2021.
Edited and reviewed by:
Panagiotis Polygerinos, Hellenic Mediterranean University, GreeceCopyright © 2021 Dämmer, Lackner, Laicher, Neumann and Major. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Gabriel Dämmer, Z2FicmllbC5kYWVtbWVyQGZlc3RvLmNvbQ==