 Milad Shafiee Ashtiani
Milad Shafiee Ashtiani Alborz Aghamaleki Sarvestani
Alborz Aghamaleki Sarvestani Alexander Badri-Spröwitz
Alexander Badri-Spröwitz- Dynamic Locomotion Group, Max Planck Institute for Intelligent Systems, Stuttgart, Germany
Animals locomote robustly and agile, albeit significant sensorimotor delays of their nervous system and the harsh loading conditions resulting from repeated, high-frequent impacts. The engineered sensorimotor control in legged robots is implemented with high control frequencies, often in the kilohertz range. Consequently, robot sensors and actuators can be polled within a few milliseconds. However, especially at harsh impacts with unknown touch-down timing, controllers of legged robots can become unstable, while animals are seemingly not affected. We examine this discrepancy and suggest and implement a hybrid system consisting of a parallel compliant leg joint with varying amounts of passive stiffness and a virtual leg length controller. We present systematic experiments both in computer simulation and robot hardware. Our system shows previously unseen robustness, in the presence of sensorimotor delays up to 60 ms, or control frequencies as low as 20 Hz, for a drop landing task from 1.3 leg lengths high and with a compliance ratio (fraction of physical stiffness of the sum of virtual and physical stiffness) of 0.7. In computer simulations, we report successful drop-landings from 3.8 leg lengths (1.2 m) for a 2 kg quadruped robot with 100 Hz control frequency and a sensorimotor delay of 35 ms.
1 Introduction
Animals use muscle-tendon networks, which they control by spinal circuits, the brainstem, and with sensory feedback to produce joint torque and work for legged locomotion (Forssberg et al., 1977; Grillner and Wallen, 1985; Biewener, 1989; Ijspeert, 2008; Takakusaki et al., 2016; Stratmann et al., 2018). The response time for muscle action caused by an external stimulus is related to axonal conduction velocity and animal body weight, and the resulting sensorimotor delay can be as slow as 41 ms in a 4 kg, cat-sized animal (More et al., 2010; Franklin and Wolpert, 2011; More and Donelan, 2018). House cats run with up to 5 Hz locomotion frequency (Bertram et al., 2014). At an assumed duty cycle of 0.4 the stance phase lasts 80 ms, and the animal would be sensor-blind for half its stance phase, i.e., during the entire force ramp-up time. We often assume feedback to be critical in challenging conditions like in rough terrain locomotion. However, running birds and other animals traverse hidden perturbations with ease, albeit limited sensorimotor capabilities (Daley et al., 2006; Ernst et al., 2018).
Animal locomotion control is simplified by a morphology with tendons and muscles with intrinsic physical stiffness (Alexander, 1990; Blickhan et al., 2007a). Physical elasticities mounted serially like tendons can lead to under-actuation and reduced controllability. However, animals show no obvious signs of decline in robustness, responsiveness, or agility. Many muscle-tendons are part of more extensive networks with parallel muscle-tendon units, requiring sensorimotor coordination (Lombard, 1903; Hutchinson et al., 2005). This raises two questions: For parallel mounted active and passive stiffness, how do animals deal with significant sensorimotor delays (Figure 1A)? And how are legged robots impacted (Figure 1B)? This section briefly reviews concepts from biomechanics and legged robotics dealing with sensorimotor delays, the control of leg forces, especially at leg impacts, and active and passive joint stiffness. In the main part of this work we present a robotic proof-of-concept characterizing parallel active and passive stiffness as one source of robustness against adverse conditions for feedback controllers.
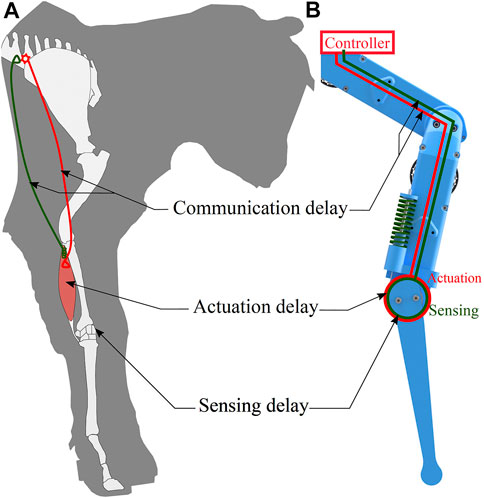
FIGURE 1. (A) Animal locomotion control is subject to sensorimotor delays from sensing, communication, and actuation. The drawing is loosely inspired by Figure 1 of More and Donelan (2018). (B) Robots typically have lower intrinsic delays from electronic sensing and communication. Instead, delays are caused, for example, by filtering noisy data. We systematically tested robot controllers with varying sensorimotor delay and control frequency. We hypothesized that a hybrid system comprised of passive joint elasticity and parallel active joint stiffness can reject sensorimotor delays robustly, for appropriate compliance ratios.
Inspired by animal morphology and passive and active leg stiffness, legged robot designs often include mechanical springs (Nasiri et al., 2016; Ambrose and Ames, 2020). Series elastic actuation (SEA) can simplify control, improve robustness and interaction safety, and protect actuators from overloads (Raibert et al., 1984; Robinson et al., 1999; Pratt and Krupp, 2004; Hutter et al., 2011; Calanca et al., 2015; Hutter et al., 2016; AhmadSharbafi et al., 2020). Designs with parallel mounted springs and actuators (parallel elastic actuation, PEA) can increase leg forces, improve locomotion energy efficiency, and reduce actuator loading (Gunther et al., 2015; Niehues et al., 2015; Plooij et al., 2016; Yesilevskiy et al., 2016; Liu et al., 2018; Toxiri et al., 2018; Yesilevskiy et al., 2018; Roozing et al., 2019; Ambrose and Ames, 2020). Combined parallel and serial elastic designs have been proposed, leading to reduced peak torques and improved locomotion applicability (Grimmer et al., 2012). Leg stiffness is altered mechanically in several ways; decoupling actuator and spring action during the locomotion cycle can simplify control and improve energy efficiency (Wiggin et al., 2011; Spröwitz et al., 2013). Variable elastic mechanisms augment physical stiffness for efficient actuation (Choi et al., 2011; Mathijssen et al., 2014; Braun et al., 2016). Until today, it remains challenging to effectively alter and rapidly manipulate compliance under high loads while keeping the mechanisms compact, robust, and lightweight.
Serial and parallel elastic-legged robots can locomote by feed-forward control and without system state knowledge from feedback (Iida and Pfeifer, 2004; Narioka et al., 2012; Spröwitz et al., 2018; Ruppert and Spröwitz, 2019). However, passive, compliant designs are under-actuated and show limited controllability. Parallel elastic designs can maintain good control authority; when controllability is more needed than spring-based natural dynamics, the actuator overrides the spring’s action (Verstraten et al., 2016). Usually, parallel elastic legs are designed with strong springs providing all essential torques and forces. Consequently, strong, relatively heavy, and fast actuators are required to override springs.
Legged robots with proprioceptive actuation and sensing and quasi-direct drives feature the highest control authority, compared to passive and partially actuated designs (Seok et al., 2012; Ding and Park, 2017; Park et al., 2017). These legged machines are agile and fast, they jump high, and land robustly (Park et al., 2017; Grimminger et al., 2020). From a sensorimotor perspective, proprioceptive actuators require 1) low communication and control delays in the range of a few milliseconds allowing 2) high-frequency control above 500 Hz, 3) accurate force and joint speed sensing, 4) and precise touch-down sensing (Bledt et al., 2018; Grimminger et al., 2020; Li et al., 2020). Not all conditions are always met, especially in unknown terrain and during harsh touch-downs, when actuator gains are changed, and when sensor noise indirectly causes feedback delays (Hubicki et al., 2016; Hammoud et al., 2020).
Robot force sensors are affected by leg impacts loading legs from zero to multiple body weights in a few ten milliseconds, and leading to wobbling masses (Günther et al., 2003; Mo et al., 2020). Impact vibrations transfer to the sensor’s mechanics and appear as sensor noise requiring processing (Spröwitz et al., 2018; Grimminger et al., 2020). Low-noise leg force sensors are being developed, yet there remains a trade-off between sensitivity and specificity, sensor noise from impacts, and sensor weight and complexity (Ananthanarayanan et al., 2012; Hutter et al., 2014; Grimminger et al., 2020; Ruppert and Badri-Spröwitz, 2020). Noisy force data can be filtered to identify touch-down and leg loading uniquely, but filtering adds to the overall sensorimotor delay; for example, delays of 31 ms are documented to uniquely identify touch down with proprioceptive sensing (Grimminger et al., 2020). Monitoring the deflection of physical joint elasticity provides alternative leg loading information, for example, for virtual model control (Pratt et al., 1997). Virtual damping assumes precise speed estimation, but numerically differentiating noisy signals requires filtering for sufficiently smooth signals, leading to feedback delay (Flacco et al., 2012; Hammoud et al., 2020).
Robot-internal electrical communication is limited only by the speed of light, and with relatively short wire lengths communication delays are minimal. Contrary, teleoperation between operator and legged robot over long-distance can lead to significant feedback delays (Varkonyi et al., 2014). Dedicated force feedback control can robustly deal with limited delays; beyond that, control destabilizes (Lee and Spong, 2006; Shafiee-Ashtiani et al., 2017; Shafiee et al., 2019). The applicability of high-level locomotion planners is related to control frequency and therefore also to sensorimotor delay; current planners run on time for control frequencies above 100 Hz (Ponton et al., 2018; Mastalli et al., 2020). Legged robots intrinsically tolerating low control frequencies are therefore good candidates for complex online locomotion planners.
Besides virtual and physical springs, both virtual and physical damping have been applied to control legged locomotion, also as part of impedance control (Seok et al., 2012; Boaventura et al., 2013; Nagayama et al., 2016; Park et al., 2017; Heim et al., 2020; Mo et al., 2020). By dissipating excess potential and kinetic energy and producing damping forces, leg reaction forces are adapted, and post-impact oscillations are reduced (Blickhan et al., 2007a; Haeufle et al., 2014; Semini et al., 2015). Virtual damping control requires precise speed estimation, which makes the method brittle in the presence of sensor noise (Bledt et al., 2018; Hammoud et al., 2020). Mechanical leg dampers are immune to feedback delays and sensor noise but must actively be switched off when not required (Mo et al., 2020).
In animals, upper limb control is subject to sensorimotor delays, like during manipulation tasks. Humans and other animals manipulate objects by exploiting muscle-tendon elasticities, effectively changing joint stiffness (Franklin et al., 2004). Antagonistic pairs of muscle-tendons can be prestressed by feed-forward (‘preflex’) control, leading to increased joint stiffness for a given posture independent from feedback delay, but with limited movement range (Hogan, 1984; Crevecoeur and Scott, 2014). Alternatively, reflexes can alter joint stiffness. Mouel and Brette (2019) show that increased joint stiffness should be compensated for by reduced sensorimotor gains; otherwise, delayed feedback leads to unstable behavior. Setting joint impedance through feed-forward sensorimotor commands might allow stable upper limb postures with noisy state estimation (Berret and Jean, 2020). Upper limb manipulation and lower limb locomotion tasks differ in their respective loading scenarios. Most manipulation tasks are continuous, while legged locomotion is always hybrid and non-continuous. Leg forces and loading times depend on body weight and drop height. The leg forces in this work ramp up from zero to body weights within 0.1 s and lead to joint angle changes above 45°. End-effector forces during manipulation are typically within the range of the object’s weight instead of the user’s body weight (Crevecoeur and Scott, 2014).
In this work, we aim to merge two diametrical principles while maintaining their best properties; 1) Passive leg joint compliance that works without feedback and at low control frequency, and 2) active joint compliance providing control authority. We hypothesize that, for a given robot design and locomotion task, there exists a range of compliance ratios—a ‘hybrid’ range—that works best despite significant feedback delays and low control frequencies.
This work uniquely contributes as follows; We systematically characterized the full range of active-to-passive parallel compliance ratios for a given total leg joint compliance. We simulate adverse controller conditions in simulated and hardware drop landings, including significant feedback delays, low control frequencies, and varying duty cycles. Previous work in parallel-elastic legged robotics typically investigated parallel compliance with high-frequency and low delay actuation (Mazumdar et al., 2016).
In Section 2, we present a stability analysis of a simplified model in the presence of sensorimotor delays, for two ratios of parallel compliance. We then present computer simulations and hardware experiments and investigate the effect of control frequencies, sensorimotor delays, and duty cycles on a robot leg with varying ratios of parallel compliance, for drop-landings (Section 3). We also characterize a simulated quadruped robot made of four of these legs, for multiple drop-landing heights. We discuss the work in Section 4, and conclude in Section 5.
2 Materials and Methods
We quantify the total (sum of) system compliance as active compliance in parallel to passive (spring-based) compliance, acting at the knee joint (Figure 1B):
where
Hence, for a compliance ratio
2.1 Theoretical Analysis of a Simplified, Reduced Model of an Actuated Pendulum
We analyzed a simplified system with parallel compliance, to analytically quantify the effects of sensorimotor delays. The reduced order model consists of a strut-like leg mounted as a single degree-of-freedom pendulum and represents a simplified robot lower leg (Figure 4A). The equations governing the pendulum motion are:
where
where
We linearized the system’s exponential time delay term with a third-order Padé approximation. A system pole analysis of this simple system provides an intuitive understanding of the effects of two compliance ratios for a given total joint stiffness on closed-loop stability, and for given sensorimotor delays.
2.2 Computer Simulation of Articulated Robot Legs
We characterized a single, articulated robot leg with hybrid joint compliance. Drop landings are one of the most challenging tasks due to high, impulse-like ground reaction forces, and nonlinear and hybrid leg loading. Drop landing is similar to a step response perturbation, which is a conventional control theory tool to characterize black box systems. We computer simulated the robot leg in PyBullet (Coumans and Bai, 2019), and performed extensive drop-landing simulations for a broad range of sensorimotor delays, duty cycle frequencies, and
In Figure 2, we show the control and sensorimotor strategies tested. The black curve is the schematic, desired knee motor torque trajectory. The control frequency (step-like, brown line) is measured in commands per second. For reference, the control frequency of proprioceptive actuation in legged robots is often around 1 kHz, i.e., a cycle period takes
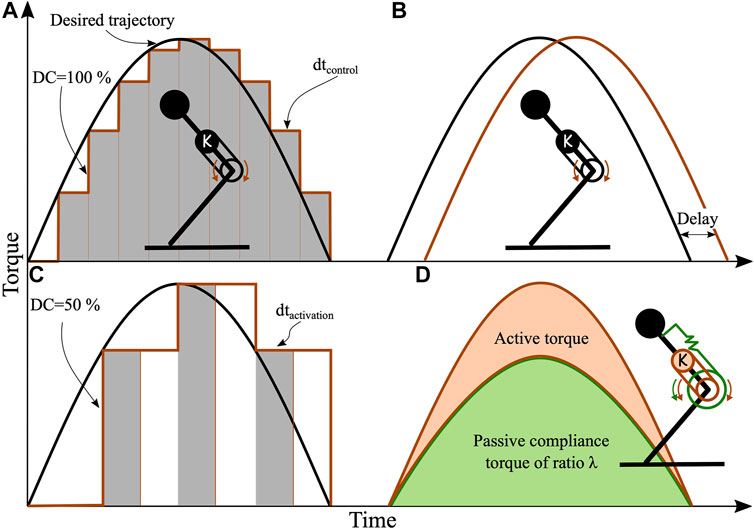
FIGURE 2. Knee motor command for different combinations of control frequency, duty cycle, and sensorimotor delay. (A) A 100% duty cycle at low control frequency. (B) A set sensorimotor delay between the desired knee output torque, and the commanded output torque. (C) A 50% duty cycle. (D) An example for a compliance ratio of
Torque is applied with three strategies; First, the activation duration
The active compliance controller knee joint input is:
To simulate the spring in PyBullet, we implemented a knee joint spring torque:
2.3 Setup Hardware Experiments
We modified a single leg of the eight degree-of-freedom (8-DOF), open-source, quadruped robot ‘Solo’ (Grimminger et al., 2020). The leg has two active degrees of freedom, one at the hip and one at the knee. Both leg segments are 0.16 m long, the lower leg mounts a semi-circular foot of 15 mm radius. A brushless motor (Antigravity MN4004-kv380, T-Motor) drives a two-stage belt transmission with an overall
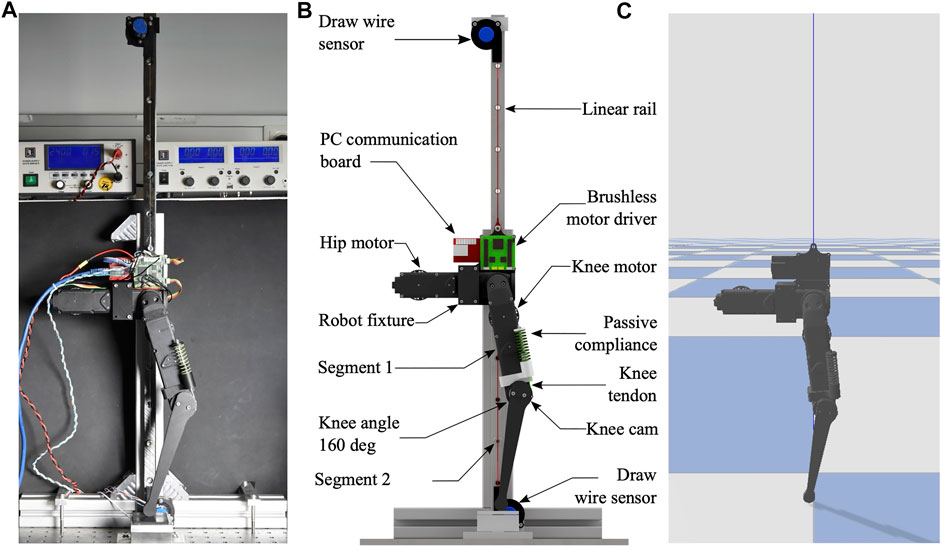
FIGURE 3. Experimental setup. (A) The 2-DOF hybrid compliant leg. The one-directional spring (passive compliance) extends the knee joint via a knee tendon and a knee pulley. Knee springs with varying stiffness were mounted during the experiments, supporting between 0 and 100% robot’s weight. A rail guides the robot’s vertical drop, and a pair of potentiometers measures the robot’s height. The knee motor produces torques in parallel to mounted knee spring. (B) Setup details, computer aided drawing. (C) The Unified Robot Description Format (URDF)-based model of the hybrid compliant robot leg, simulated in PyBullet.
To simplify the touch-down scenario, the robot leg was dropped guided by a vertical rail (Figure 3A). The hip joint was constrained to follow half of the knee joint angle at all times, controlled by a position controller creating foot contact vertically below the hip joint. We recorded the vertical hip position with two draw-wire sensors (LX-PA-40, WayCon) mounted above and below the robot, to cancel out single sensor force bias. The hip position allows quantifying the robot’s landing behavior and characterizing hybrid compliance. The hip position was sampled by an analog-to-digital (A/D) converter on the brushless motor driver board. The motor board sends motor position and vertical position data to the PC communication board, via a serial peripheral interface (SPI). The PC communication board connects the motor driver board via EtherCAT to a PC (Intel Xeon(R) W-2145 CPU, 3.7 GHz, 16 cores, 64 bit, 62.5 GB Ram, Ubuntu 18.04). We wrote a Python wrapper to control the robot. The Python wrapper timestamps and saves joint angles, motor currents, and hip height into a text file. We analyzed and plotted data in Matlab.
3 Result
This section initially presents results from the pendulum task. We then show computer simulation results with a single robot leg and hybrid joint compliance. We simulated quadruped-robot drops from multiple heights, and we present hardware experiment results with a single leg mounted to a vertical slider.
3.1 Hanging Pendulum Analysis, Simplified Model
The pendulum pole analysis shows that for
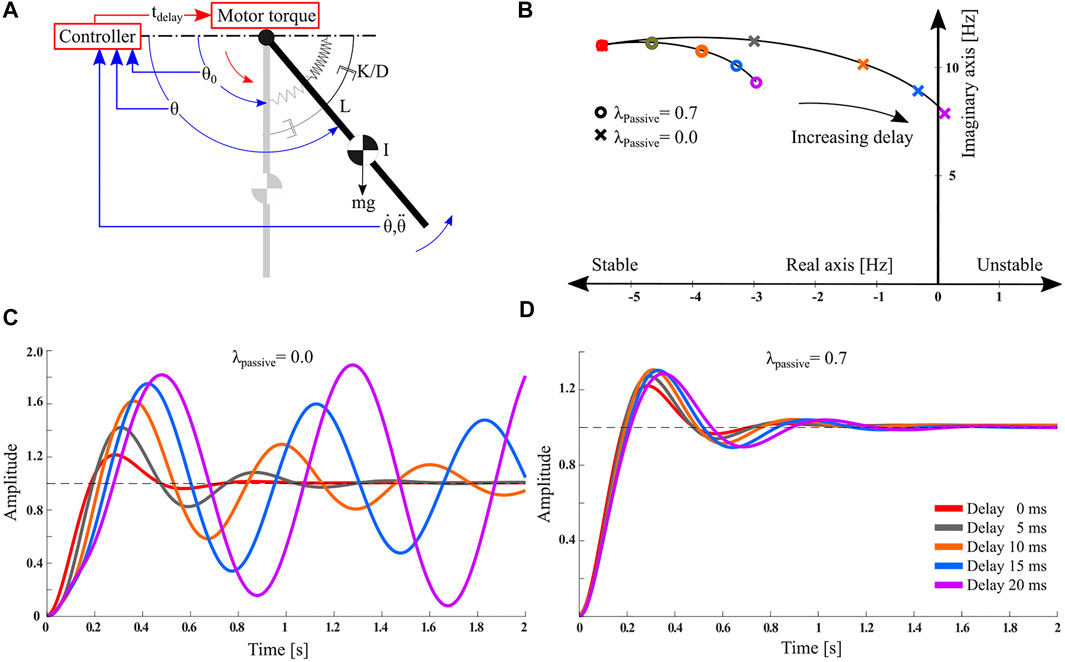
FIGURE 4. Simulation results of a simplified, single-link pendulum mounted to a parallel motor-spring combination (A). Parameters are provided in Section 2.1. (B) Graphical pole analysis of the actuated pendulum. The effects of varying delay and compliance ratios on the system stability are shown. (C) The system’s step response for varying delays with
The pendulum example is a simplification allowing a pole analysis with few parameters, but with an intuitive interpretation; Figure 4B shows when parameters lead to destabilization, with a clear cross-over into the unstable regime. The robot leg computer simulations in the following sections require more elaborate interpretation, but are more precise in terms of mechanics, and less simplified. Instead of continuous time analyses, time-discrete analyses are also applied for simplified systems, and we briefly provide results of a time-discrete analysis of the pendulum example in the Supplementary Material section for the interested reader.
3.2 Single-Leg Computer Simulation
We studied the effects of varying combinations of sensorimotor delay, control frequency, and compliance ratio
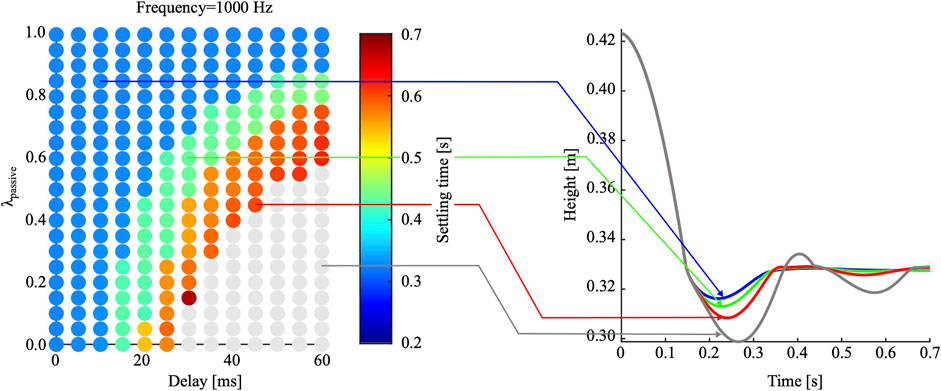
FIGURE 5. Computer simulation results: 273 drops were simulated, for the robot leg controlled with a control frequency of 1,000 Hz and a duty cycle of 100%. The compliance ratio
We then performed computer simulations to quantify the viability of the landing task, varying
In PyBullet, we set joint damping values of 0.01 Nms/rad and 0.05 Nms/rad for hip and knee, respectively. A single leg weighs 0.6 kg, and the quadruped robot 2.0 kg. We chose the total knee joint stiffness so that leg length changed by 10% during the first mid-stance, after dropping it from 42.5 cm. We implemented a
In Figure 5, the results of 273 drop-landing simulations are shown, with varying sensorimotor delays and
We then investigated the effect of varying control frequency (20, 50, 100, 250, and 1,000 Hz) and duty cycle (25, 50, and 100%, Figure 6). Most visible is a decreasing feasible area for all three duty cycles at reduced control frequencies. Comparing duty cycles of 25 and 100% (Figures 6A,C) shows that the feasible area did change with reduced duty cycles. Low compliance ratios (
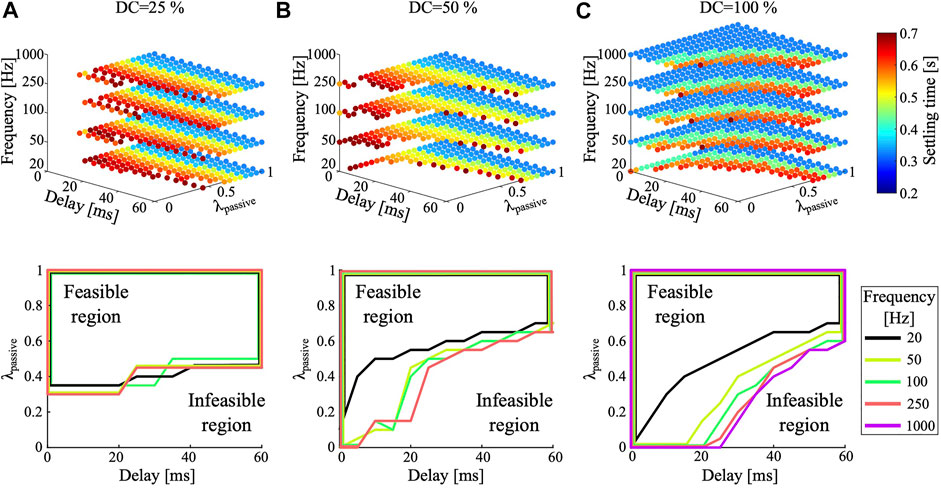
FIGURE 6. Simulation results: Dropping the hybrid actuated robot leg from a height of 42.5 cm. Parameters varied are duty cycle (DC), control frequency, system delay, and compliance ratio (
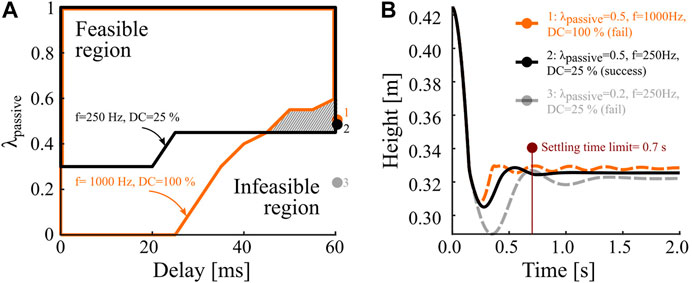
FIGURE 7. For simulations with a 25% duty cycle and 60 ms feedback delay feasible solutions are visible for compliance ratios of
3.3 Quadruped Computer Simulation
The previous single leg simulation results indicate that with high compliance ratio, robot performance becomes largely independent of sensorimotor delay, and control frequency. But fully passive compliance reduces control authority. In seven drop-landing scenarios, we altered drop height and passive and active stiffness of a quadruped robot, to characterize system and controller performance, but also to emphasize the importance of control authority (Figure 8). The duty cycle was set to 100% in all quadruped robot simulations. The simulation parameters are provided in Table 1.
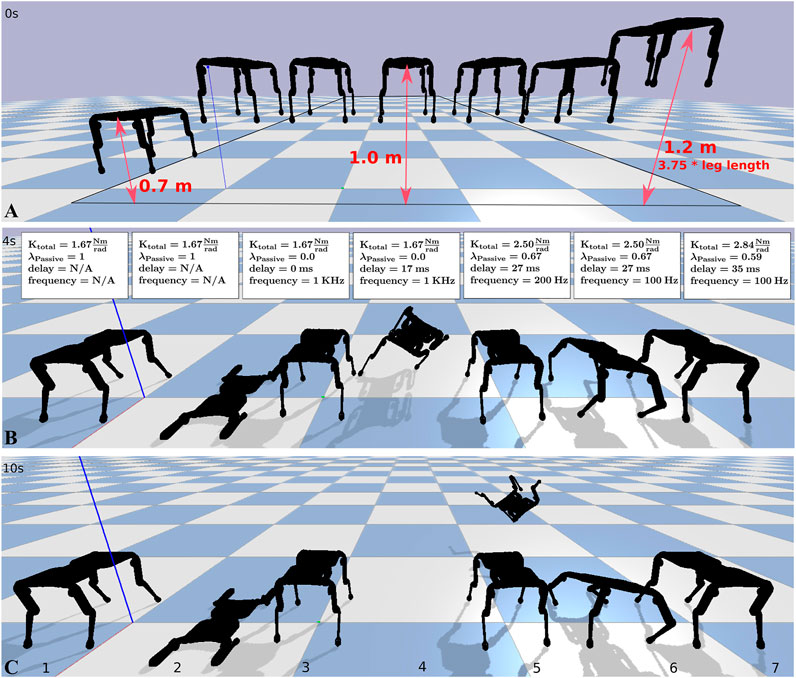
FIGURE 8. Computer simulated quadruped robots landing, in seven different scenarios, controlled with a duty cycle of 100%. (A) The robot’s initial drop heights are indicated with red arrows. (B) An intermediate robot state at 4 s simulation time. The panels also provide controller parameters. (C) Converged robot state after 10 s. Cases 1, 3, 5, and 7 landed successfully.

TABLE 1. Simulation parameters of the quadrupedal robot, with a duty cycle of 100%.
The case-1 robot simulated a compliance ratio of 1.0, i.e., fully passive elastic knee joints. The robot was dropped from a height of 0.7 m and landed successfully. The case-2 robot used identical control parameters, was dropped from 1.0 m height, and failed to land successfully. At close observation it becomes visible that its knee joints inverted after the first landing rebound, and the robot landed with inverted knee angles and without spring support. Case-2 emphasizes the drawback of passive compliance; without control, the knee joint orientation cannot be adjusted prior to rebounding. The case-3 configuration featured a controller with full, bi-directionally active compliance (no passive compliance), and without sensorimotor delay. The controller ran at 1 kHz and successfully guided the landing. In case-4, a fully active compliant robot with 17 ms sensorimotor delay failed to land properly, which shows the vulnerability of active compliance in the presence of sensorimotor delay. Case-5 shows a successful landing scenario by combining passive and active compliance (
3.4 Hardware Experiments
We validated the previous single-leg simulations with hardware experiments. We chose compliance ratios of
In Figure 9, we assess the difference
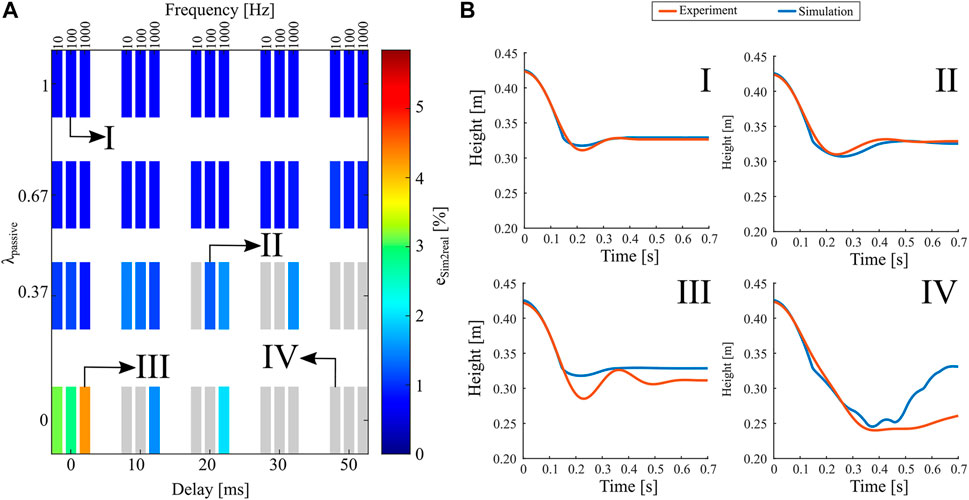
FIGURE 9. Results comparing computer simulations and hardware experiments, as root-mean-square error of the instantaneous hip height normalized by the initial leg length. (A) Good similarities are shown as colored data patches. Grey data patches indicate unsuccessful drop experiments, violating settling time or final height criteria. (B) Hip trajectories. (I–III) Successful landings with short settling times and sufficient settling hip heights. (IV) An example of an unsuccessful landing in simulation and hardware.
4 Discussion
The single-leg drop results in Figure 5 show a continuous and gentle decrease of system robustness with increasing feedback delay when transitioning from a fully physically springy leg toward a fully actuated leg controlled by a virtual-spring controller. Hence, parallel structures of active compliance with the correct amount of passive compliance offer one possible answer to the question of how animals counteract perturbations in the presence of large sensorimotor delays. The ratio of passive to active compliance could be permanently set genetically, formed over a lifetime by training (Fouré et al., 2012), or set when required by partial or full recruitment of slacked muscle-tendon structures (Hogan, 1984). Legged robots equally benefit from intrinsic robustness against feedback delay. We believe that compliance ratios for other designs will depend on the specific leg and controller design parameters, the locomotion task, and the required controllability. If the available control frequency is limited or high delays are expected, a higher compliance ratio can be used. In the future, we are especially interested in exploring compliance rations of
1. Select a total joint stiffness based on the required steady state leg length, the maximum leg deflection, and the leg geometry (segment lengths, robot mass, cam radius). This step can be executed by test-mounting a
2. Alternatively, a simplified kinematic model can provide an estimate of the steady-state leg length (Supplementary Material Section 3).
3. Select a desired compliance ratio. In the examples shown, compliance ratios between 0.5 and 0.7 worked well. Low compliance ratios provide higher controllability, as long as control frequencies are high and feedback delays are low, and vice versa. Duty cycles should be set to maximum (100%), unless they are specifically exploited.
4. Check that the parallel mounted actuator has the capacity to supply the required torque and speed. Low compliance ratios (
This work centers around adjusting the ratio of physical, passive compliance for a given total joint compliance. Online-adjustable spring stiffness mechanisms have been proposed, but many are still bulky and heavy (Yamaguchi and Takanishi, 1997; Vanderborght et al., 2013; Wolf et al., 2015). If a locomotion task requires large changes of total joint stiffness with a constant ratio of passive compliance (Ferris et al., 1998), robust and light-weight adjustable stiffness designs will be needed. For versatile locomotion sequences like jumping, landing and fast running, learning-based methods could extract a ‘best’ range of compliance ratios from large locomotion data sets.
We see at least three applications for hybrid compliance ratios in legged robots; 1) For legged robots which exploit natural dynamics of mechanical springs but require intermittent, high controllability for tasks like jumping or acceleration (Spröwitz et al., 2013; Lakatos et al., 2017). 2) For legged robots without access to high-frequency control or low-noise and low-latency sensors, which are expensive and time-consuming to develop (Nam et al., 2020). 3) For motion planners featuring update frequencies in the low sub-kilohertz range, in need of a legged robot with intrinsic robustness when controlled at these frequencies (Ponton et al., 2018).
5 Conclusion and Summary
We systematically characterized combinations of parallel mounted passive and active joint compliance for their ability to control the robot’s leg length after landing. We tested against detrimental effects of significant feedback delays, low control frequencies, and low duty cycles in the full range of compliance ratios. Our goal was to find a compliance ratio for one given total knee compliance that works well with the above controller limitations. In comparison, previous work in parallel-elastic legged robotics typically investigated parallel compliance with high-frequency and low delay actuation (Batts et al., 2016; Mazumdar et al., 2016).
Our computer simulations show successful single-leg drop-landings for sensorimotor delays up to 60 ms, and control frequencies as low as 20 Hz in combination with a compliance ratio of
We ran computer simulations of quadruped robots with varying total leg stiffness values when landing from multiple drop heights. Compliance ratios in the hybrid range (around 0.5) worked better in the presence of adverse controller settings (delays, control frequency) than active compliance, and allowed for the necessary amount of controllability compared to pure passive compliance. We finally note that the engineered compliance ratios were robustly handling feedback delays similar to the neuromuscular sensorimotor delays reported of running animals of equal size to the presented hybrid robot leg.
Data Availability Statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author Contributions
MA and AS contributed to the concept, robot design, experimental setup, simulation, and experimentation. AB-S developed the original hybrid active/passive compliant concept. All authors discussed the data, agreed with the presented results, and contributed to the writing.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Acknowledgments
The authors thank the International Max Planck Research School for Intelligent Systems (IMPRS-IS) for supporting AAS. We thank Felix Grimminger and Jad Saud for support developing the robot leg and the spring mechanism, the Robotic ZWE for prototyping support, and Julian Viereck for providing the quadruped robot URDF file.
Supplementary Material
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/frobt.2021.645748/full#supplementary-material
References
AhmadSharbafi, M., Yazdanpanah, M. J., Ahmadabadi, M. N., and Seyfarth, A. (2020). Parallel Compliance Design for Increasing Robustness and Efficiency in Legged Locomotion-Theoretical Background and Applications. IEEE/ASME Trans. Mechatronics. doi:10.1109/TMECH.2020.3019686
Alexander, R. (1990). Three Uses for Springs in Legged Locomotion. Int. J. Robotics Res. 9, 53–61. doi:10.1177/027836499000900205
Ambrose, E., and Ames, A. D. (2020). Improved Performance on Moving-Mass Hopping Robots with Parallel Elasticity. 2020 IEEE Int. Conf. Robotics Automation (Icra) (Ieee), 2457–2463. doi:10.1109/ICRA40945.2020.9197070
Ananthanarayanan, A., Foong, S., and Kim, S. (2012). A Compact Two DOF Magneto-Elastomeric Force Sensor for a Running Quadruped. 2012 IEEE Int. Conf. Robotics Automation (Icra), 13981403. doi:10.1109/ICRA.2012.6225201
Batts, Z., Kim, J., and Yamane, K. (2016). Design of a Hopping Mechanism Using a Voice Coil Actuator: Linear Elastic Actuator in Parallel (LEAP). 2016 IEEE Int. Conf. Robotics Automation (Icra), 655–660. doi:10.1109/ICRA.2016.7487191
Berret, B., and Jean, F. (2020). Stochastic Optimal Open-Loop Control as a Theory of Force and Impedance Planning via Muscle Co-contraction. PLOS Comput. Biol. 16, e1007414. doi:10.1371/journal.pcbi.1007414
Bertram, J. E. A., Gutmann, A., Randev, J., and Hulliger, M. (2014). Domestic Cat Walking Parallels Human Constrained Optimization: Optimization Strategies and the Comparison of normal and Sensory Deficient Individuals. Hum. Mov. Sci. 36, 154–166. doi:10.1016/j.humov.2014.05.008
Biewener, A. A. (1989). Scaling Body Support in Mammals: Limb Posture and Muscle Mechanics. Science 245, 45–48. doi:10.1126/science.2740914
Bledt, G., Wensing, P. M., Ingersoll, S., and Kim, S. (2018). Contact Model Fusion for Event-Based Locomotion in Unstructured Terrains. 2018 IEEE Int. Conf. Robotics Automation (Icra), 4399–4406. doi:10.1109/ICRA.2018.8460904.ISSN:2577-087X
Blickhan, R., Seyfarth, A., Geyer, H., Grimmer, S., Wagner, H., and Günther, M. (2007a). Intelligence by Mechanics. Phil. Trans. R. Soc. A: Math. Phys. Eng. Sci. 365, 199–220. doi:10.1098/rsta.2006.1911
Boaventura, T., Medrano-Cerda, G. A., Semini, C., Buchli, J., and Caldwell, D. G. (2013). IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Stability and Performance of the Compliance Controller of the Quadruped Robot Hyq
Braun, D. J., Apte, S., Adiyatov, O., Dahiya, A., and Hogan, N. (2016). Compliant Actuation for Energy Efficient Impedance Modulation. 2016 IEEE Int. Conf. Robotics Automation (Icra), 636–641. doi:10.1109/ICRA.2016.7487188
Calanca, A., Muradore, R., and Fiorini, P. (2015). A Review of Algorithms for Compliant Control of Stiff and Fixed-Compliance Robots. IEEE/ASME Trans. Mechatronics 21, 613–624. doi:10.1109/TMECH.2015.2465849
Choi, J., Hong, S., Lee, W., Kang, S., and Kim, M. (2011). A Robot Joint with Variable Stiffness Using Leaf Springs. IEEE Trans. Robotics 27, 229–238. doi:10.1109/TRO.2010.2100450
Coumans, E., and Bai, Y. (2019). Pybullet, a python Module for Physics Simulation for Games, Robotics and Machine Learning. Available at: http://pybullet.org.
Crevecoeur, F., and Scott, S. H. (2014). Beyond Muscles Stiffness: Importance of State-Estimation to Account for Very Fast Motor Corrections. PLoS Comput. Biol. 10, e1003869. doi:10.1371/journal.pcbi.1003869
Daley, M. A., Usherwood, J. R., Felix, G., and Biewener, A. A. (2006). Running over Rough Terrain: guinea Fowl Maintain Dynamic Stability Despite a Large Unexpected Change in Substrate Height. J. Exp. Biol. 209, 171–187. doi:10.1242/jeb.01986
Ding, Y., and Park, H.-W. (2017). Design and Experimental Implementation of a Quasi-Direct-Drive Leg for Optimized Jumping. 2017 IEEE/RSJ Int. Conf. Intell. Robots Syst. (Iros), 300–305.
Ernst, M., Götze, M., Blickhan, R., and Müller, R. (2018). Humans Adjust the Height of Their center of Mass within One Step when Running across Camouflaged Changes in Ground Level. J. Biomech. doi:10.1016/j.jbiomech.2018.12.036
Ferris, D. P., Louie, M., and Farley, C. T. (1998). Running in the Real World: Adjusting Leg Stiffness for Different Surfaces. Proc. R. Soc. Lond. Ser. B: Biol. Sci. 265, 989–994. doi:10.1098/rspb.1998.0388
Flacco, F., Luca, A. D., Sardellitti, I., and Tsagarakis, N. G. (2012). On-line Estimation of Variable Stiffness in Flexible Robot Joints. Int. J. Robotics Res. 31, 1556–1577. doi:10.1177/0278364912461813
Forssberg, H., Grillner, S., and Rossignol, S. (1977). Phasic Gain Control of Reflexes from the Dorsum of the Paw during Spinal Locomotion. Brain Res. 132, 121–139. doi:10.1016/0006-8993(77)90710-7
Fouré, A., Nordez, A., and Cornu, C. (2012). Effects of Eccentric Training on Mechanical Properties of the Plantar Flexor Muscle-Tendon Complex. J. Appl. Physiol., 114, 523–537. Publisher: American Physiological Society. doi:10.1152/japplphysiol.01313.2011
Franklin, D. W., So, U., Kawato, M., and Milner, T. E. (2004). Impedance Control Balances Stability with Metabolically Costly Muscle Activation. In J. Neurophysiol., 92. American Physiological Society, 3097–3105. doi:10.1152/jn.00364.2004.Publisher
Franklin, D. W., and Wolpert, D. M. (2011). 72. Publisher: Elsevier, 425–442. doi:10.1016/j.neuron.2011.10.006Computational Mechanisms of Sensorimotor ControlNeuron
Grillner, S., and Wallen, P. (1985). Central Pattern Generators for Locomotion, with Special Reference to Vertebrates. Annu. Rev. Neurosci. 8, 233–261. doi:10.1146/annurev.ne.08.030185.001313
Grimmer, M., Eslamy, M., Gliech, S., and Seyfarth, A. (2012). A Comparison of Parallel-And Series Elastic Elements in an Actuator for Mimicking Human Ankle Joint in Walking and Running. In Robotics and Automation (ICRA), 2012 IEEE International Conference on. (IEEE), 2463–2470.
Grimminger, F., Meduri, A., Khadiv, M., Viereck, J., Wüthrich, M., Naveau, M., et al. (2020). An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research. IEEE Robotics Automation Lett. 5, 3650–3657. doi:10.1109/LRA.2020.2976639
Gunther, F., Shu, Y., and Iida, F. (2015). Parallel Elastic Actuation for Efficient Large Payload Locomotion. 2015 IEEE Int. Conf. Robotics Automation (Icra), 823–828. doi:10.1109/ICRA.2015.7139273
Günther, M., Sholukha, V. A., Kessler, D., Wank, V., and Blickhan, R. (2003). Dealing with Skin Motion and Wobbling Masses in Inverse Dynamics. J. Mech. Med. Biol. 3, 309–335.
Haeufle, D. F. B., Günther, M., Wunner, G., and Schmitt, S. (2014). Quantifying Control Effort of Biological and Technical Movements: An Information-Entropy-Based Approach. Phys. Rev. E 89, 012716. doi:10.1103/PhysRevE.89.012716
Hammoud, B., Khadiv, M., and Righetti, L. (2020). Impedance Optimization for Uncertain Contact Interactions through Risk Sensitive Optimal Control arXiv:2011.04684 [cs, eess].
Heim, S., Millard, M., Le Mouel, C., and Badri-Spröwitz, A. (2020). A Little Damping Goes a Long Way: a Simulation Study of How Damping Influences Task-Level Stability in Running. Biol. Lett. 16, 20200467. doi:10.1098/rsbl.2020.0467Publisher: Royal Society
Hogan, N. (1984). Adaptive Control of Mechanical Impedance by Coactivation of Antagonist Muscles. IEEE Trans. automatic Control 29, 681–690. Publisher: IEEE.
Hubicki, C., Grimes, J., Jones, M., Renjewski, D., Spröwitz, A., Abate, A., et al. (2016). ATRIAS: Design and Validation of a Tether-free 3D-Capable spring-mass Bipedal Robot. Int. J. Robotics Res. 35, 1497–1521. doi:10.1177/0278364916648388
Hutchinson, J. R., Anderson, F. C., Blemker, S. S., and Delp, S. L. (2005). Analysis of Hindlimb Muscle Moment Arms in Tyrannosaurus rex Using a Three-Dimensional Musculoskeletal Computer Model: Implications for Stance, Gait, and Speed. Paleobiology 31, 676–701. doi:10.1666/04044.1
Hutter, M., Gehring, C., Hopflinger, M., Blosch, M., and Siegwart, R. (2014). Toward Combining Speed, Efficiency, Versatility, and Robustness in an Autonomous Quadruped. IEEE Trans. Robotics 1–14. doi:10.1109/TRO.2014.2360493 PP,
Hutter, M., Gehring, C., Jud, D., Lauber, A., Bellicoso, C. D., Tsounis, V., et al. (2016). Anymal-a Highly mobile and Dynamic Quadrupedal Robot. 2016 IEEE/RSJ Int. Conf. Intell. Robots Syst. (Iros) (Ieee), 38–44.
Hutter, M., Remy, C. D., Hoepflinger, M. A., and Siegwart, R. (2011). Scarleth: Design and Control of a Planar Running Robot. In 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems (IEEE), 562–567. doi:10.1142/9789814415958_0062
Iida, F., and Pfeifer, R. (2004). Cheap Rapid Locomotion of a Quadruped Robot: Self-Stabilization of Bounding Gait. Intell. Autonomous Syst. 8, 642–649.
Ijspeert, A. J. (2008). Central Pattern Generators for Locomotion Control in Animals and Robots: A Review. Neural Networks 21, 642–653. doi:10.1016/j.neunet.2008.03.014
Lakatos, D., Friedl, W., and Albu-Schaffer, A. (2017). Eigenmodes of Nonlinear Dynamics: Definition, Existence, and Embodiment into Legged Robots with Elastic Elements. IEEE Robotics Automation Lett. 1–1. doi:10.1109/LRA.2017.2658018
Lee, D., and Spong, M. W. (2006). Passive Bilateral Teleoperation with Constant Time Delay. IEEE Trans. robotics 22, 269–281. (Publisher: IEEE.
Li, C., Ding, Y., and Park, H.-W. (2020). Centroidal-momentum-based Trajectory Generation for Legged Locomotion. Mechatronics 68, 102364. doi:10.1016/j.mechatronics.2020.102364
Liu, X., Rossi, A., and Poulakakis, I. (2018). A Switchable Parallel Elastic Actuator and its Application to Leg Design for Running Robots. IEEE/ASME Trans. Mechatronics 23, 2681–2692. doi:10.1109/TMECH.2018.2871670
Lombard, W. P. (1903). The Tendon Action and Leverage of Two-Joint Muscles of the Hind Leg of the Frog, with Special Reference to the spring Movement. In Contributions to medical research. Ann Arbor: Wahr, 280–301.
Mastalli, C., Budhiraja, R., Merkt, W., Saurel, G., Hammoud, B., Naveau, M., et al. (2020). Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control. In 2020 IEEE International Conference on Robotics and Automation (ICRA), 2536–2542. doi:10.1109/ICRA40945.2020.9196673.ISSN:2577-087X
Mathijssen, G., Furnemont, R., Brackx, B., Van Ham, R., Lefeber, D., and Vanderborght, B. (2014). Design of a Novel Intermittent Self-Closing Mechanism for a MACCEPA-Based Series-Parallel Elastic Actuator (SPEA). 2014 IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS 2014), 2809–2814. doi:10.1109/IROS.2014.6942947
Mazumdar, A., Spencer, S. J., Hobart, C., Salton, J., Quigley, M., Wu, T., et al. (2016). Parallel Elastic Elements Improve Energy Efficiency on the STEPPR Bipedal Walking Robot. IEEE/ASME Trans. Mechatronics 1–1. doi:10.1109/TMECH.2016.2631170
Mo, A., Izzi, F., Haeufle, D. F. B., and Badri-Spröwitz, A. (2020). Effective Viscous Damping Enables Morphological Computation in Legged Locomotion. Front. Robotics AI 7. doi:10.3389/frobt.2020.00110
More, H. L., and Donelan, J. M. (2018). Scaling of Sensorimotor Delays in Terrestrial Mammals. Proc. R. Soc. B: Biol. Sci. 285, 20180613. doi:10.1098/rspb.2018.0613
More, H. L., Hutchinson, J. R., Collins, D. F., Weber, D. J., Aung, S. K., and Donelan, J. M. (2010). Scaling of Sensorimotor Control in Terrestrial Mammals. Proc. R. Soc. B: Biol. Sci. 277, 3563–3568. doi:10.1098/rspb.2010.0898
Mouel, C. L., and Brette, R. (2019). Anticipatory Coadaptation of Ankle Stiffness and Sensorimotor Gain for Standing Balance. PLOS Comput. Biol., 15. e1007463. Publisher: Public Library of Science. doi:10.1371/journal.pcbi.1007463
Nagayama, T., Ishihara, H., Tomori, H., Yamada, Y., and Nakamura, T. (2016). Vertical Jumping Motion Simulation with Consideration for landing Using a Monopedal Robot with Artificial Muscles and Magnetorheological Brakes. IECON 2016 - 42nd Annu. Conf. IEEE Ind. Elect. Soc., 660–665. doi:10.1109/IECON.2016.7794022
Nam, H., Xu, Q., and Hong, D. (2020). A Reliable Low-Cost Foot Contact Sensor for Legged Robots. 2020 17th Int. Conf. Ubiquitous Robots (Ur), 219–224. doi:10.1109/UR49135.2020.9144878.ISSN:2325-033X
Narioka, K., Rosendo, A., Spröwitz, A., and Hosoda, K. (2012). Development of a Minimalistic Pneumatic Quadruped Robot for Fast Locomotion. In Proceedings of IEEE International Conference on Robotics and Biomimetics (ROBIO). Guangzhou, China, 307–311. doi:10.1109/ROBIO.2012.6490984
Nasiri, R., Khoramshahi, M., Shushtari, M., and Ahmadabadi, M. N. (2016). Adaptation in Variable Parallel Compliance: Towards Energy Efficiency in Cyclic Tasks. IEEE/ASME Trans. Mechatronics 22, 1059–1070. doi:10.1109/TMECH.2016.2637826
Niehues, T. D., Rao, P., and Deshpande, A. D. (2015). Compliance in Parallel to Actuators for Improving Stability of Robotic Hands during Grasping and Manipulation. Int. J. Robotics Res. 34, 256–269. doi:10.1177/0278364914558016
Park, H.-W., Wensing, P. M., and Kim, S. (2017). High-speed Bounding with the MIT Cheetah 2: Control Design and Experiments. Int. J. Robotics Res. doi:10.1177/02783649176942440278364917694244
Plooij, M., Wisse, M., and Vallery, H. (2016). Reducing the Energy Consumption of Robots Using the Bidirectional Clutched Parallel Elastic Actuator. IEEE Trans. Robotics 32, 1512–1523. doi:10.1109/TRO.2016.2604496
Ponton, B., Herzog, A., Del Prete, A., Schaal, S., and Righetti, L. (2018). On Time Optimization of Centroidal Momentum Dynamics. 2018 IEEE Int. Conf. Robotics Automation (Icra) (Ieee), 5776–5782.
Pratt, J., Dilworth, P., and Pratt, G. (1997). Virtual Model Control of a Bipedal Walking Robot. 1997 IEEE Int. Conf. Robotics Automation, Proc. 1, 193–198. doi:10.1109/ROBOT.1997.620037
Pratt, J. E., and Krupp, B. T. (2004). Series Elastic Actuators for Legged Robots. In Unmanned Ground Vehicle Technology Vi, 5422 (Orlando, FL: International Society for Optics and Photonics), 135–144.
Raibert, M. H., Brown Jr, H. B., and Murthy, S. S. (1984). Machines that Walk. In Robotics and Artificial Intelligence. Springer, 345–364.
Roberts, T. J., and Gabaldón, A. M. (2008). Interpreting Muscle Function from EMG: Lessons Learned from Direct Measurements of Muscle Force. Integr. Comp. Biol. 48, 312–320. doi:10.1093/icb/icn056
Robinson, D. W., Pratt, J. E., Paluska, D. J., and Pratt, G. A. (1999). Series Elastic Actuator Development for a Biomimetic Walking Robot. In 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (Cat. No. 99TH8399). IEEE, 561–568.
Roos, F., Johansson, H., and Wikander, J. (2006). Optimal Selection of Motor and Gearhead in Mechatronic Applications. Mechatronics 16, 63–72. doi:10.1016/j.mechatronics.2005.08.001
Roozing, W., Ren, Z., and Tsagarakis, N. G. (2019). An Efficient Leg with Series–Parallel and Biarticular Compliant Actuation: Design Optimization, Modeling, and Control of the Eleg. Int. J. Robotics Res. doi:10.1177/02783649198937620278364919893762
Ruppert, F., and Badri-Spröwitz, A. (2020). FootTile: a Rugged Foot Sensor for Force and Center of Pressure Sensing in Soft Terrain. In 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 4810–4816. doi:10.1109/ICRA40945.2020.9197466
Ruppert, F., and Spröwitz, A. (2019). Series Elastic Behavior of Biarticular Muscle-Tendon Structure in a Robotic Leg. Front. neurorobotics 13, 64. doi:10.3389/fnbot.2019.00064
Semini, C., Barasuol, V., Boaventura, T., Frigerio, M., Focchi, M., Caldwell, D. G., et al. (2015). Towards Versatile Legged Robots through Active Impedance Control. Int. J. Robotics Res. doi:10.1177/02783649155788390278364915578839
Seok, S., Wang, A., Otten, D., and Kim, S. (2012). Actuator Design for High Force Proprioceptive Control in Fast Legged Locomotion. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 1970–1975. doi:10.1109/IROS.2012.6386252
Shafiee, M., Romualdi, G., Dafarra, S., Chavez, F. J. A., and Pucci, D. (2019). Online Dcm Trajectory Generation for Push Recovery of Torque-Controlled Humanoid Robots. In 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids). IEEE, 671–678. doi:10.1109/Humanoids43949.2019.9034996
Shafiee-Ashtiani, M., Yousefi-Koma, A., and Shariat-Panahi, M. (2017). Robust Bipedal Locomotion Control Based on Model Predictive Control and Divergent Component of Motion. In 2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 3505–3510. doi:10.1109/ICRA.2017.7989401
Spröwitz, A. T., Tuleu, A., Ajallooeian, M., Vespignani, M., Möckel, R., Eckert, P., et al. (2018). Oncilla Robot: A Versatile Open-Source Quadruped Research Robot with Compliant Pantograph Legs. Front. Robotics AI 5. doi:10.3389/frobt.2018.00067
Spröwitz, A., Tuleu, A., Vespignani, M., Ajallooeian, M., Badri, E., and Ijspeert, A. J. (2013). Towards Dynamic Trot Gait Locomotion: Design, Control, and Experiments with Cheetah-Cub, a Compliant Quadruped Robot. Int. J. Robotics Res. 32, 932–950. doi:10.1177/0278364913489205
Stratmann, P., Albu-Schäffer, A., and Jörntell, H. (2018). Scaling Our World View: How Monoamines Can Put Context into Brain Circuitry. Front. Cell Neurosci. 12. doi:10.3389/fncel.2018.00506
Takakusaki, K., Chiba, R., Nozu, T., and Okumura, T. (2016). Brainstem Control of Locomotion and Muscle Tone with Special Reference to the Role of the Mesopontine Tegmentum and Medullary Reticulospinal Systems. J. Neural Transm. 123, 695–729. doi:10.1007/s00702-015-1475-4
Toxiri, S., Calanca, A., Ortiz, J., Fiorini, P., and Caldwell, D. G. (2018). A Parallel-Elastic Actuator for a Torque-Controlled Back-Support Exoskeleton. IEEE Robotics Automation Lett. 3, 492–499. doi:10.1109/LRA.2017.2768120
Vanderborght, B., Albu-Schaeffer, A., Bicchi, A., Burdet, E., Caldwell, D. G., Carloni, R., et al. (2013). Variable Impedance Actuators: A Review. Robotics Autonomous Syst. 61, 1601–1614. doi:10.1016/j.robot.2013.06.009
Varkonyi, T. A., Rudas, I. J., Pausits, P., and Haidegger, T. (2014). Survey on the Control of Time Delay Teleoperation Systems. In IEEE 18th International Conference on Intelligent Engineering Systems INES 2014. IEEE, 89–94. doi:10.1109/INES.2014.6909347
Verstraten, T., Beckerle, P., Furnémont, R., Mathijssen, G., Vanderborght, B., and Lefeber, D. (2016). Series and Parallel Elastic Actuation: Impact of Natural Dynamics on Power and Energy Consumption. Mechanism Machine Theor. 102, 232–246.
Wiggin, M., Sawicki, G., and Collins, S. (2011). An Exoskeleton Using Controlled Energy Storage and Release to Aid Ankle Propulsion. In 2011 IEEE International Conference on Rehabilitation Robotics (ICORR). 1–5. doi:10.1109/ICORR.2011.5975342
Wolf, S., Grioli, G., Friedl, W., Grebenstein, M., Hoeppner, H., Burdet, E., et al. (2015). Variable Stiffness Actuators: Review on Design and Components. IEEE/ASME Transactions on Mechatronics. 1. doi:10.1109/TMECH.2015.2501019
Yamaguchi, J., and Takanishi, A. (1997). Design of Biped Walking Robots Having Antagonistic Driven Joints Using Nonlinear spring Mechanism. In , Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1997. IROS ’97. vol. 1, 251–259 vol.1. doi:10.1109/IROS.1997.649062
Yesilevskiy, Y., Gan, Z., and David Remy, C. (2018). Energy-optimal Hopping in Parallel and Series Elastic One-Dimensional Monopeds. J. Mech. Robotics 10. doi:10.1115/1.4039496
Keywords: legged robots, parallel and passive compliance, hybrid actuation and leg design, sensorimotor delay, Feedback, latency, parallel elastic actuation
Citation: Ashtiani MS, Aghamaleki Sarvestani A and Badri-Spröwitz A (2021) Hybrid Parallel Compliance Allows Robots to Operate With Sensorimotor Delays and Low Control Frequencies. Front. Robot. AI 8:645748. doi: 10.3389/frobt.2021.645748
Received: 23 December 2020; Accepted: 26 May 2021;
Published: 16 June 2021.
Edited by:
Dai Owaki, Tohoku University, JapanReviewed by:
Takashi Takuma, Osaka Institute of Technology, JapanThiago Boaventura, University of São Paulo, Brazil
Philipp Stratmann, Technical University of Munich, Germany
Copyright © 2021 Ashtiani, Aghamaleki Sarvestani and Badri-Spröwitz. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Alexander Badri-Spröwitz, c3Byb3dpdHpAaXMubXBnLmRl
†These authors have contributed equally to this work