 Keenan Albee1*†
Keenan Albee1*† Charles Oestreich1,2*†
Charles Oestreich1,2*† Caroline Specht3
Caroline Specht3 Antonio Terán Espinoza1
Antonio Terán Espinoza1 Jessica Todd4
Jessica Todd4 Ian Hokaj1
Ian Hokaj1 Roberto Lampariello3
Roberto Lampariello3 Richard Linares1
Richard Linares1- 1Space Systems Laboratory (SSL) and Astrodynamics, Space Robotics and Controls Lab (ARCLab), Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, Cambridge, MA, United States
- 2Guidance & Control Group, The Charles Stark Draper Laboratory, Inc., Cambridge, MA, United States
- 3Autonomy and Teleoperation, Institute of Robotics and Mechatronics, German Aerospace Center (DLR), Oberpfaffenhofen, Germany
- 4Human Systems Laboratory (HSL), Department of Aeronautics and Astronautics and Department of Applied Ocean Physics and Engineering, Massachusetts Institute of Technology/Woods Hole Oceanographic Institute, Cambridge, MA, United States
Accumulating space debris edges the space domain ever closer to cascading Kessler syndrome, a chain reaction of debris generation that could dramatically inhibit the practical use of space. Meanwhile, a growing number of retired satellites, particularly in higher orbits like geostationary orbit, remain nearly functional except for minor but critical malfunctions or fuel depletion. Servicing these ailing satellites and cleaning up “high-value” space debris remains a formidable challenge, but active interception of these targets with autonomous repair and deorbit spacecraft is inching closer toward reality as shown through a variety of rendezvous demonstration missions. However, some practical challenges are still unsolved and undemonstrated. Devoid of station-keeping ability, space debris and fuel-depleted satellites often enter uncontrolled tumbles on-orbit. In order to perform on-orbit servicing or active debris removal, docking spacecraft (the “Chaser”) must account for the tumbling motion of these targets (the “Target”), which is oftentimes not known a priori. Accounting for the tumbling dynamics of the Target, the Chaser spacecraft must have an algorithmic approach to identifying the state of the Target’s tumble, then use this information to produce useful motion planning and control. Furthermore, careful consideration of the inherent uncertainty of any maneuvers must be accounted for in order to provide guarantees on system performance. This study proposes the complete pipeline of rendezvous with such a Target, starting from a standoff estimation point to a mating point fixed in the rotating Target’s body frame. A novel visual estimation algorithm is applied using a 3D time-of-flight camera to perform remote standoff estimation of the Target’s rotational state and its principal axes of rotation. A novel motion planning algorithm is employed, making use of offline simulation of potential Target tumble types to produce a look-up table that is parsed on-orbit using the estimation data. This nonlinear programming-based algorithm accounts for known Target geometry and important practical constraints such as field of view requirements, producing a motion plan in the Target’s rotating body frame. Meanwhile, an uncertainty characterization method is demonstrated which propagates uncertainty in the Target’s tumble uncertainty to provide disturbance bounds on the motion plan’s reference trajectory in the inertial frame. Finally, this uncertainty bound is provided to a robust tube model predictive controller, which provides tube-based robustness guarantees on the system’s ability to follow the reference trajectory translationally. The combination and interfaces of these methods are shown, and some of the practical implications of their use on a planned demonstration on NASA’s Astrobee free-flyer are additionally discussed. Simulation results of each of the components individually and in a complete case study example of the full pipeline are presented as the study prepares to move toward demonstration on the International Space Station.
1 Introduction
Tumbling objects are commonplace on-orbit. Spent rocket bodies, fuel-exhausted satellites, and space debris are all examples of potential free-tumbling objects. In a variety of sub-fields of space robotics, including on-orbit servicing and repair, active debris removal, and on-orbit assembly, the ability to dock with arbitrary tumbling objects given the limited initial knowledge of the Target object is a key capability (Flores-Abad et al., 2014). Often, these tasks are safety critical but cannot allow human-in-the-loop oversight due to the complexity of the maneuvers involved and the lack of reliable teleoperation and communication. As a result, robotic autonomous execution of rendezvous activities is a desirable capability in order to repair satellites, de-orbit debris, and more.
Consequently, autonomous docking with tumbling Targets is an active area of literature in the space robotics community, with a variety of individual algorithmic contributions over the past two decades. Some of the earliest studies dealt with motion and parameter estimation of tumbling Targets, the first step in preparing for rendezvous (Hillenbrand and Lampariello, 2005). Assuming Target knowledge, multiple early studies also proposed a variety of motion planning and control techniques, including deterministic approximate analytical trajectory optimization (Fejzi and Miller, 2008), detailed optimal control formulations (Aghili, 2008), and nonlinear optimization-based formulations (Lampariello, 2010). Work in this area progressively added greater complexity, including increased sources of uncertainty (Aghili, 2012; Sternberg and Miller, 2018) and more advanced motion planning approaches (Aghili, 2020).
Recently, some work has begun to explore the significant robotics systems integration considerations required for the integration of multiple elements of the autonomous rendezvous phase: estimation, motion planning, and control under uncertainty, to name a few (Terán Espinoza et al., 2019). Leveraging recent work in robust control and planning, the ability to provide guarantees on system performance in the real-time setting of autonomous rendezvous has brought full-fledged autonomous docking frameworks within reach (Limon et al., 2008; Majumdar and Tedrake, 2017; Buckner and Lampariello, 2018; Mammarella et al., 2018). However, the need remains for a complete autonomy pipeline for such a maneuver that is additionally robust to the most significant uncertainty sources of autonomous docking with tumbling Targets and that can operate with automatic visual estimation and motion planning components.
This study details such a framework that can account for some of the key uncertainty sources of tumbling rendezvous; specifically, the unknown Target tumble state. This framework, currently scheduled for a series of International Space Station (ISS) tests in 2021, introduces the algorithmic approach to connect these submodules to make autonomous close proximity rendezvous a reality, while additionally considering uncertainty due to imperfect knowledge of these tumbling Targets. Furthermore, this study describes the unique way in which this form of uncertainty results in an uncertain reference trajectory and discusses the limits on providing robustness guarantees. Initial results on all parts of the autonomy pipeline are presented independently, along with a full case study example of an autonomous rendezvous in a detailed simulation environment.
The remainder of this article is formulated as follows: Section 2 outlines the autonomous rendezvous problem; Section 3 details the varied methods needed to form the full autonomy pipeline and how these segments interact; Section 4 presents results of individual components as well as a case study example of the full pipeline algorithm in a detailed simulation environment; and finally, Section 5 includes a discussion of the proposed pipeline and plans for integration and future experimental testing.
2 Problem Formulation
The problem considers a close proximity rendezvous maneuver within the last ∼20–40 m of the approach operation, with the goal of safely approaching a tumbling free-floating object (the “Target”) and reaching a predefined offset point fixed in the Target’s body frame called the mating point (MP). It is assumed that the Target is non-cooperative and passive. The Chaser spacecraft that will perform the rendezvous begins at some initial standoff offset distance
2.1 Representative Satellite System of Interest
The Astrobee robots are a series of free-flying robots operating aboard the ISS with the purpose of 1) astronaut assistance and 2) microgravity autonomy research (Albee, Ekal, and Oestreich, 2020). In this way, the Astrobee program serves as a successor to the Synchronized Position Hold, Engage, and Reorient Experimental Satellites (SPHERES) in terms of guidance, navigation, and control experiments in microgravity Saenz-Otero and Miller (2005). The development of the autonomy pipeline proposed in this study has been produced in conjunction with scheduled ISS testing on the Astrobee hardware, and so uses this representative satellite system for demonstration purposes.
Astrobee is one of the first reusable microgravity testbeds capable of providing the hardware needed to test an autonomous tumbling rendezvous framework. Astrobee utilizes two impellers which are throttled in each direction to provide full holonomic propulsion capability. The robots use multiple sensors for navigation, including 2D visual cameras, 3D time-of-flight (ToF) cameras, and an inertial measurement unit (IMU). The flight software is implemented on two general-purpose processors, each running Ubuntu 16.04 and the Robotic Operating System (ROS). Two Astrobees are used in this experiment: one designated as the Chaser satellite, and the other designated as the Target object. The Chaser’s forward-facing 3D ToF camera (“HazCam”) and IMU provide the front-end measurements to the relative state and parameter estimation problem.
2.2 System Dynamics
Two sets of dynamics are at work: those of a partially uncharacterized/uncertain tumbling rigid body Target and of a rigid body Chaser. The Newton–Euler equations can be used to fully describe the 6 degree of freedom (DOF) motion of both systems. The translational dynamics are of particular interest for the Chaser with respect to motion robustness (i.e., collision avoidance).
2.2.1 Reference Frames
The frames of reference used in this study are defined as follows:
These are depicted in context of the relative state estimation problem in Figure 1. Note that frames are also referred to using
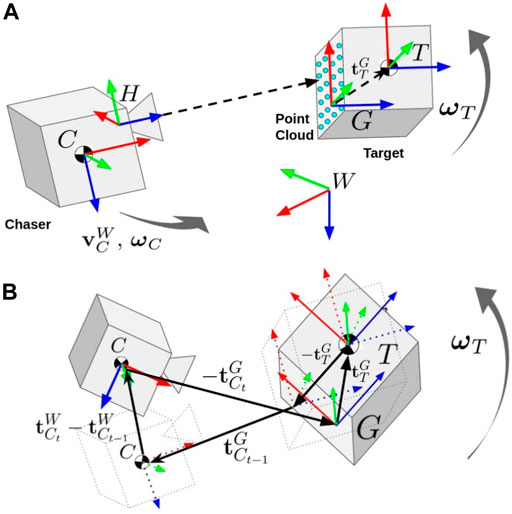
FIGURE 1. (A) The relevant coordinate frames for estimation of the Chaser and Target states and Target inertial parameters. The Chaser’s body frame
2.2.2 Tumbling Target Rigid Body Dynamics
The Target is assumed to be a rigid body in a free tumble, the dynamics of which are described by the Newton–Euler equations. The full equations of motion are given by the following:
where the rotational terms are of interest, namely,
where the products of inertia
The inertia tensor and initial angular velocity can yield a large variety of future system behaviors. A classic example is the flat spin, where
The Target is free to tumble, and dissipative effects are considered negligible over the timescales of rendezvous. Uncertainty in the Target’s tumbling dynamics will result in an uncertain solution to the IVP, addressed in Section 2.4.
2.2.3 Chaser Translational Dynamics
The Chaser is also a 6 DOF rigid body and obeys the same set of dynamics as the Target, albeit with its own unique parameters. Since the translational dynamics of interest are purely linear they may be written in state space form, as follows:
where
The Chaser and Target Astrobees each have a mass of 9.58 kg and inertial parameters
The Envisat tumble can be mimicked by an actively controlled Astrobee with a different inertia tensor—precomputed tumble types can be actively tracked to simulate the tumble of a different object.
2.3 Chaser Motion Constraints
As it is typical in on-orbit missions, the maneuver is constrained by the Target geometry, as well as the Chaser’s limits on velocity and input. Constraints are additionally drawn from safety considerations including collision avoidance and plume impingement of the Target. The thruster authority available to the Chaser from the on-board thrusters dictates the available Chaser linear force and rotational torque.
2.3.1 Constraints for the System of Interest
For the particular scenario of interest involving Astrobee, the motion constraints also result from the restrictions on Chaser movement dictated by the space available in the ISS Japanese Experiment Module (JEM) which houses the Astrobee platform, resulting in additional position and velocity constraints on the Chaser.
Considering that the approach tasks are restricted to the JEM, the robots are confined to move within a workspace of dimensions of approximately
While the Astrobee robots have a fairly simple shape, the inertia of the Target satellite has been simulated, as discussed in the previous section, to match the more complex shape of the Envisat satellite. It is further assumed that this complex shape is the actual shape of the Target spacecraft. The Target Astrobee robot, therefore, wears a virtual geometry, similar to the real geometry of Envisat. As can be seen in Figure 2, the virtual geometry of the Target Astrobee includes a large solar panel and antenna appendages. This makes the collision avoidance task non-trivial. This complexity is tackled by creating a geometric model (
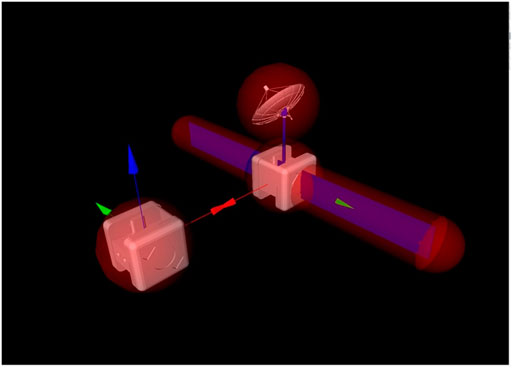
FIGURE 2. Scene depicting the approach of the Chaser to the Target Astrobee. The virtual geometry of the Target Astrobee is shown.
2.4 Uncertainty Sources
Uncertainty enters the problem in a unique fashion: normally, additive uncertainty is thought of as a representation of unknowns in a system’s dynamics, environmental disturbances, and “noise.” However, in this problem the uncertainty of interest is due primarily to the reference trajectory itself (Buckner and Lampariello, 2018). As the motion planner must use the predicted Target motion to successfully reach the MP and avoid collisions, deviations in the Target motion due to parameter uncertainty in the Target’s initial tumbling state must be accounted for.
First, an approach trajectory in the Target’s body frame
which is a function of the initial Target state estimate
The nominal inertial trajectory
will differ from the nominal trajectory due to the real Target motion. This creates an additive disturbance to the system in the inertial frame dependent on initial estimate inaccuracy, the inertial parameter estimates or prior knowledge, and the rate and accuracy of online updates,
As such, the controller should strive to track
3 Approach and Methods
3.1 The Autonomy Pipeline: Concept of Operations
The approach taken can be broken into several distinct phases, depicted pictorially in Figure 3. First, the Chaser vehicle uses its time in the holding standoff position within approximately ∼20–40 m of the Target to gather observations of the Target tumble state and produce estimates of its angular velocity and attitude as well as its principal axes of rotation, as discussed in Section 3.2. Next, the Target tumble may be propagated using the nominal Target model, enabling the motion planning process described in Section 3.3 and the calculation of an uncertainty bound using the statistics of these estimates, as in Section 3.4. In Section 3.5, the maneuver is executed using tube-based robust model predictive control to retain performance guarantees. Finally, the MP is reached and the mission concludes. The algorithmic components in each of these phases are depicted in Figure 4, delineating the flow of inputs and outputs to each component of the algorithm.
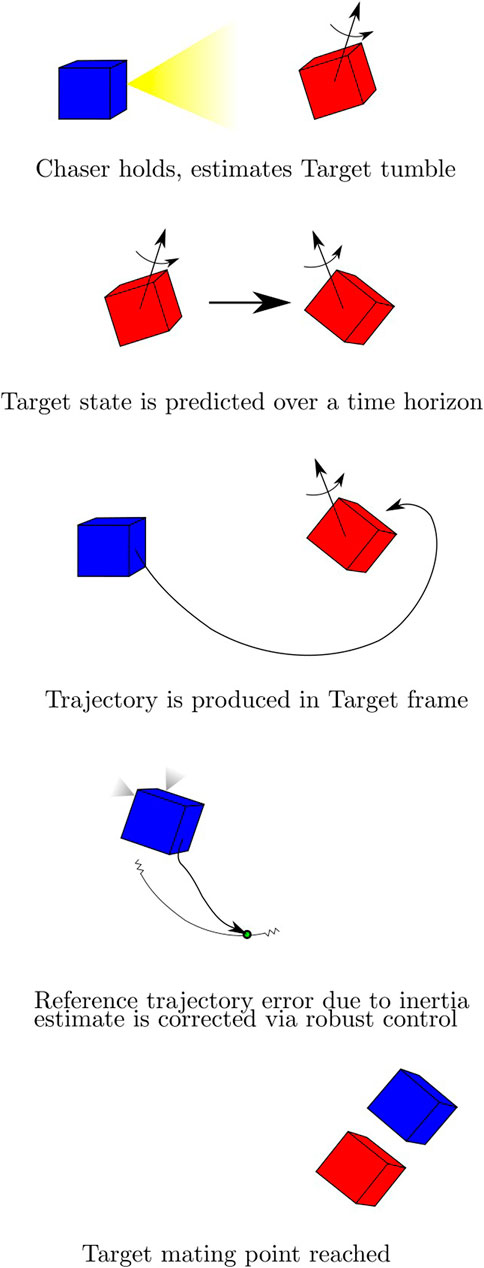
FIGURE 3. The concept of operations for the autonomous docking procedure with Chaser (blue) and Target (red). Following a standoff estimation phase a motion planner uses an estimate of future Target attitude to create a plan in the inertial frame, which is tracked by a robust controller. Uncertainty is converted from Target parameter uncertainty to Chaser reference trajectory uncertainty bounds.
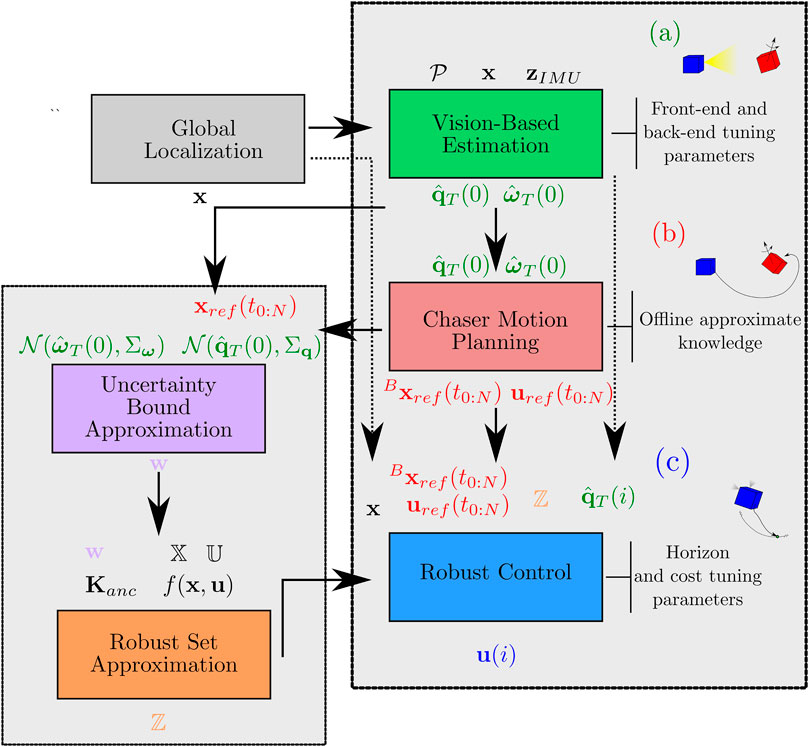
FIGURE 4. The full algorithmic pipeline, showing major inputs and outputs of each component algorithm. Inputs are shown above, and outputs are shown below. (A) shows the SLAM and polhode analysis visual estimation of the Target, (B) shows the online motion planning component, and (C) shows the robust model predictive controller and its supporting algorithms.
3.2 Relative Navigation and Target Characterization
As outlined in Section 3.1, on-orbit inspection of an unknown spacecraft is not only a required component of currently proposed missions (Sullivan et al., 2015) but also of the more general spacecraft close-proximity operations (Terán Espinoza et al., 2019). There have been numerous research efforts to implement simultaneous localization and mapping (SLAM) approaches for estimating the Chaser and Target states as well as the Target’s inertial parameters (Tweddle et al., 2015; Setterfield et al., 2018a; Terán Espinoza, 2020). These studies utilize incremental smoothing and mapping (iSAM) (Kaess et al., 2008; Kaess et al., 2012) with stereo camera and IMU measurements to recover both the inspector and the Target state estimates in real time. Microgravity experiments on the ISS-based SPHERES testbed indicated the success and potential of these algorithms (Fourie et al., 2014; Tweddle et al., 2016). As such, this pipeline adapts the framework of Terán Espinoza (2020) for the inspection of an unknown tumbling Target using Astrobee’s sensor suite to provide SLAM front-end measurements. The full SLAM framework is implemented in Astrobee’s simulation environment via ROS.
The remainder of this section describes the specific details of the portion of the scenario handled herein (e.g., sensor suite), the mathematical formulation used to formalize the problem (factor graphs), the front-end components developed for information extraction (e.g., point cloud registration), the back-end components used for sensor fusion (e.g., iSAM), and the accompanying problems resolved in incorporation with the pipeline.
3.2.1 Scenario Description
It is assumed that the Chaser satellite has a sensor suite capable of providing internal IMU measurements and external measurements that can be interpreted by a front-end as the Target pose. The Chaser Astrobee is equipped with the following sensors that fulfill these requirements: an IMU for ego-motion estimation, received at 62.5 Hz; and a 3D time-of-flight (ToF) camera to return 3D information of the Target for feature extraction and tracking purposes, received at 5 Hz. The 3D ToF camera is forward-facing on Astrobee and has a resolution of
Using the acquired per-frame IMU and 3D depth information, the goal is to incrementally estimate the dynamic states of the Target and Chaser.
where
3.2.2 Factor Graphs and Problem Formulation
A bipartite factor graph connects all relevant variables and measurement factors for the relative state estimation problem (Figure 5). The graph is composed of independent Target and Chaser pose chains. Nodes represent unknown variables (the Chaser and the Target poses) and are connected by probabilistic factors that arise from odometry measurements. The Target motion
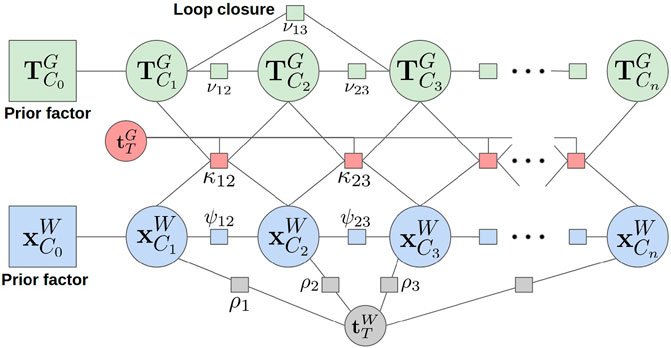
FIGURE 5. The full factor graph used for Chaser and Target state estimation. Nodes represent pose variables and are connected by ToF camera pose odometry, IMU odometry, range/bearing measurements, and rotation kinematic factors.
3.2.2.1 Front-End Modules for Information Extraction
The Chaser’s ToF camera provides a 3D point cloud of the scene at regular intervals. This depth data provides measurements of the Target motion relative to the Chaser which are then used in the Target’s pose chain within the factor graph. The Teaser++ solver (Yang et al., 2020) is used to solve the point cloud registration problem between frames, thus providing pose odometry measurements with respect to the geometric frame
of the Chaser with respect to the Target’s
The specific front-end for the Astrobee system of interest will be addressed here, though similar front-ends could be substituted for different satellite sensor suites. The Chaser’s IMU serves as the source of measurements for the Chaser’s pose chain in the factor graph. Since Astrobee’s IMU operates at a much faster rate than the ToF camera, the IMU preintegration theory from (Lupton and Sukkarieh, 2011; Carlone et al., 2014; Forster et al., 2016) is leveraged. The set of IMU readings
where
Finally, range and bearing measurements of the Target are provided by the ToF camera point clouds. These measurements are defined as:
where
3.2.2.2 Factor Graphs for Probabilistic Inference
As stated above, the Target’s pose chain is established using features from the Target’s depth information, correlated across subsequent frames. The point cloud-based odometry factor ν added to the graph is formulated as a relative pose measurement constraint, as given below:
where
Loop closures on this pose chain can be implemented in the same manner by taking matching point cloud features across non-successive frames. Practically speaking, a randomly chosen past frame can be checked for loop closures with the current frame. If there are enough matches, the odometry is computed and added to the graph.
The Chaser’s pose chain is generated from IMU factors. To carry out inertial navigation using the IMU’s information, a binary IMU factor ψ is created of the form given below:
where
The range and bearing measurements between the Chaser and the (approximate) Target’s center of mass are implemented as binary factors between the Chaser’s navigational state
where
Rotation kinematic constraints are used to disambiguate the motion of the Target and Chaser satellites. The rotation kinematic factor enforces a zero sum vector addition between temporally equivalent time step pairs in the Target and Chaser pose chains, given the assumption that the Target is unperturbed and translationally stationary. The rotation kinematic factor is built by following the vector addition shown in Figure 1, to give:
Notice that the rotation kinematic factor is dependent on estimating the constant offset between the geometric frame and Target’s body frame,
While the factor graph shown thus far exactly represents the mathematical formulation of the problem being solved, the actual online solution is computed using a different, but directly related, data structure called the Bayes tree (Kaess et al., 2010; Fourie et al., 2020; Terán Espinoza, 2020). By recycling computations at each time step, a full SLAM solution can be computed fast and accurately every time new information is received.
3.2.3 Estimation of Angular Velocity and Target Principal Axes
The above factor graph formulation allows the Chaser to estimate its own navigational state and the Target’s attitude at each timestep. These estimates are then processed to provide angular velocity measurements of each spacecraft and also determine the Target’s principal axes of rotation.
The instantaneous angular velocity estimates
where Log acts as shorthand for the SO(3) logarithmic map log followed by the inverse skew symmetric matrix operator.
Note that the Target’s orientation and angular velocity estimates are with respect to the arbitrarily initialized
The specific combination of conic types for each plane further specifies the convention and estimate for the principal axes orientation. For instance, a tumbling Target with a tri-axial inertia tensor and low rotational energy will result in two ellipses and one hyperbola Setterfield et al. (2018b). The final result is an optimized orientation
Once the angular velocity profile has been correctly aligned with the principal axes, it is possible to proceed with the estimation of the Target’s inertia ratios if they are not already known. By leveraging the closed-form solution for rigid body motion based on the Jacobi elliptic functions Hurtado and Satak (2011), a second procedure from Setterfield et al. (2018b) can be employed to create a constrained nonlinear optimization problem and solve for physically consistent values for the inertia ratios
3.3 Chaser Motion Planning
The motion planner considers only the nominal motion of the Target (propagated within the motion planner using Boost (Mascellani, 2019)) to generate nominal trajectories to control the Chaser. The method is based on Stoneman and Lampariello (2016), in which it is made evident that, if present, large appendages play an important role in the motion planning task. Similar approaches can be found in the literature, such as (Ventura et al., 2015; Park et al., 2017; Sternberg and Miller, 2018). In these studies, the convex optimization-based approach does not retain convergence guarantees. In Virgili-Llop et al. (2019), a covexification of the nonlinear collision avoidance constraint allows fast online planning for any relevant tumbling state of the Target, while retaining convergence guarantees. It is noted, however, that the method therein is based on a three-stage planning approach, necessary to account for the case in which the MP is inside the convex hull, as well as on repeated replanning, possibly for a complete period of motion of the Target, to identify the global minimum for the query at hand.
The Chaser trajectory
The approach maneuver is formulated here as a nonlinear optimization problem (NLP) to ensure feasibility of the generated trajectories with respect to the motion constraints. The NLP minimizes the mechanical energy cost
In this NLP, the first four constraints in the list are box constraints using the values outlined in Section 2.3. Additionally,
Recalling the discussion of the collision avoidance constraint from Section 2.3, the collision constraint is given by the penetration depth d such that
which is an iterative, nonlinear function. Note that the Chaser is modeled as a sphere, therefore relieving the need to consider its orientation in this constraint. Geometric modeling and collision detection is implemented using the Open Dynamics Engine, and additionally tested using the Gazebo simulation environment, detailed in Section 4 (Smith, 2009).
In order to reduce the computation time, an online planning method has been devised which provides a warm start to the optimization problem. This method makes use of a precompiled look-up table (LUT) of corresponding pairs of initial conditions for the Target’s motion and composite optimization parameter solutions p for the three b-splines to identify a suitable initial guess for the planner. By inspecting the members of the LUT to select the initial guess, it is possible to quickly reach the local minimum in solving (Eq. 22).
This LUT must be generated offline, due to the computational burden involved. Its generation requires approximate knowledge of the inertia of the Target (up to a constant multiplying factor) and geometry of the Target. If the Target is initially entirely unknown with respect to these criteria, this missing information must first be identified and relayed to ground. The inertia can be identified using one of a variety of methods, including those detailed in Setterfield and Miller (2017); Teran, (2021); Lampariello et al. (2021) and the geometry can be determined using 3D reconstruction methods. However, aside from this modeling information (which is often given ahead of time, at least approximately) the motion planning method is entirely online-computable. The resulting NLP is implemented and solved using the SLSQP algorithm provided in the nonlinear optimization package NLopt (Johnson, 2017).
3.4 Uncertainty Bound Definition
The disturbance level of major uncertainty sources must be defined in order to provide a form of robustness guarantee. The tube model predictive control (MPC) relies on a known bound of the additive disturbances; in the context of the tumbling rendezvous maneuver, this means that limits must be determined for the magnitude of disturbances defined by Eq. 11, the primary uncertainty source of interest. Given a nominal reference trajectory provided by the motion planner and uncertainty levels of the Target state estimates a series of Monte Carlo trials is computed to approximate the maximum disturbance over the course of the trajectory in a manner similar to (Buckner and Lampariello, 2018). Additionally, the effect of online-updating (and the frequency of online updating) is accounted for in the approximation procedure. For each trial, the nominal initial Target state is perturbed within the state estimate uncertainty levels, based on the statistics of the state estimates. This creates a Target tumbling trajectory that differs from the predicted motion used by the motion planner. The disturbance is then measured at each timestep of the Monte Carlo trial trajectory by comparing the nominal reference trajectory to the “real” trajectory that arises from Eq 10. This difference constitutes the defined disturbance in Eq. 11. The repeated Monte Carlo trials build up a sampling of disturbance values seen across all trajectories and, like all Monte Carlo evaluations, increase the modeling accuracy of the true distribution with a greater number of trials. From there, the uncertainty bound is defined via the largest disturbance magnitudes in each state dimension. This is a conservative approximation, and can be relieved if a lower σ value is desired. The full algorithm to determine the uncertainty bound is detailed in the algorithm of Figure 6. Note that the current implementation assumes all disturbances arise from initial state estimate errors. This algorithm can be easily modified to include disturbances from inertia parameter error as well, if desired. The Monte Carlo uncertainty bound determination process is shown in Figure 6.
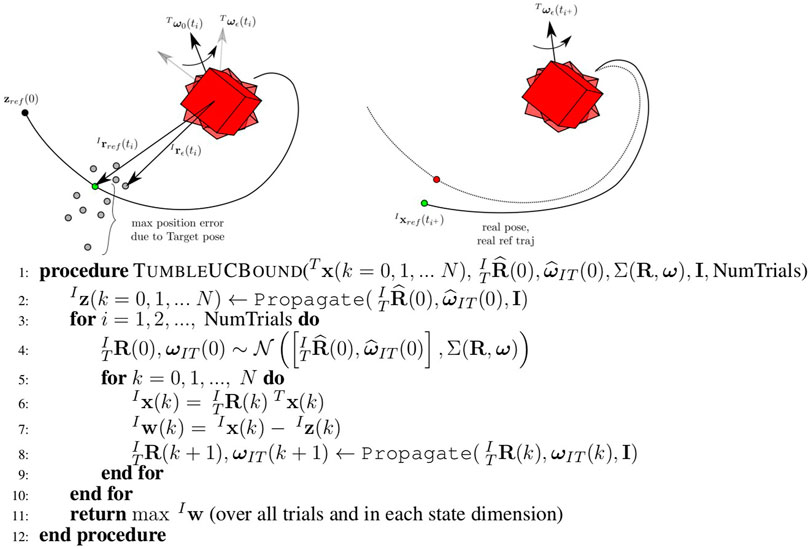
FIGURE 6. The Propagate step of the uncertainty bound procedure (left). Many Monte Carlo runs over potential initial conditions and parameters for the Target result in many possible reference trajectory updates from
3.5 Robust Tube Model Predictive Control
Model predictive control (MPC) is a commonly used control technique which is particularly notable for its ability to approximately optimally control general dynamical systems under constraints. While proofs for MPC stability under certain conditions (Mayne et al., 2011) abound, guarantees for stochastic systems are generally lacking. Tube MPC is a notable exception, providing robustness guarantees when bounded additive uncertainty is encountered in the system dynamics. Using tube MPC, a portion of control authority is reserved for robust actuation, often in a simple feedback form to counter disturbances. The guarantee obtained is one of tube robustness—if a system starts in a tube of possible states, it remains within a tube around a nominal trajectory. These tubes are formed around the nominally planned MPC trajectory, and the motion of the system can be thought of as a composition of these planned “safe sets.”
Tube MPC methods exist for both nonlinear and linear systems with additive bounded uncertainty—for this particular problem linear tube MPC is of interest for the linear translational satellite (double integrator) dynamics. (Attitude control is not considered under this robustness paradigm: the Euler equations are nonlinear and pointing constraints under the tumbling uncertainty are not as important—line of sight constraints are somewhat generous and it is assumed that motion plans produce collision-free trajectories for a max-radius ball about the system’s center of mass.) In essence, two controllers must be produced: 1) a nominal MPC, operating under a modified set of constraints to account for worst-case uncertainty; 2) an ancillary or “disturbance rejection” controller that provides robustness to aleatoric uncertainty. Given a reference trajectory, tube MPC will repeatedly plan the nominal trajectory online, and append ancillary controller actuation to the system inputs, resulting in tube robustness.
This framework is now explained for the trajectory tracking of the uncertain rendezvous reference trajectory, requiring a few ingredients: a reference trajectory

FIGURE 7. A demonstration of the tube robustness guarantee. Robust tubes are produced around nominal reference trajectories which need not necessarily coincide with the real initial state and are in turn made to track a motion planning reference trajectory,
The inertial frame Chaser translational error dynamics are then,
where
The stochastic dynamics are now in a suitable format for linear robust tube MPC. First, a disturbance rejection controller called the ancillary controller must be used to reject disturbance from a nominal MPC trajectory. The ancillary controller takes the form below and is added onto a nominal MPC input,
where
Secondarily, the actual nominal MPC trajectory
An additional modification to the MPC can be added: a parameterization of steady state values for the nominal system, captured in
subject to
Eq. 27 is executed for the first timestep of the nominal MPC solution until the solution can be recomputed at
4 Results
The components of the full rendezvous pipeline were implemented and tested using Astrobee’s simulation environment. Astrobee’s software is based on the Robotic Operating System (ROS) framework, where modular software components (nodes) exchange messages over topics for complex multi-threaded code coordination. Each part of the proposed autonomy pipeline constitutes a ROS node that is added to Astrobee’s core flight software and in some cases overrides default behavior.
The Target coordinator provides torque-free tumbling motion setpoints that are tracked by a custom standard MPC controller. In this way, the Target Astrobee can follow correct tumbling trajectories for various inertia tensor test cases, such as Envisat’s. The Chaser coordinator orchestrates all parts of the autonomy pipeline and activates each step based on timing parameters and completion status. The full ROS architecture will be used in experimental testing on the ISS. Additional detail is provided in Section 4.4 on the full pipeline setup and testing.
Each component of the pipeline is first demonstrated against individual performance tests, in preparation for combined experimental testing. The full composition of algorithms is provided in Figure 4. The results of the vision-based state and parameter estimation are summarized in Section 4.1, the motion planning in Section 4.2, and the uncertainty bound and tube MPC in Section 4.3. In Section 4.4, a case study is presented for the full operations pipeline, providing a complete example of the full autonomous rendezvous pipeline operating in the high-fidelity Astrobee simulation environment.
4.1 State and Principal Axes Estimation Performance
In testing the relative state and principal axes estimation framework, the Chaser was initially situated 1.5 m away from the Target Astrobee, which had an initial angular velocity
Downsampling and background elimination was applied to the point clouds for more efficient processing. Sufficient numbers of matches from frame to frame were found, which in turn enabled reliable pose registration solutions. In general, the Teaser++ pose registration solver provided robust pose odometry estimates of the Target’s geometric frame with low noise levels along with several loop closures. Truth values from the simulator serve as a metric to evaluate the proposed approach and provide estimation error statistics.
In terms of Chaser navigation, the estimates were smooth and closely corresponded to the true values, demonstrating the ability to disambiguate Chaser motion from the tumbling Target motion. The Target orientation and angular velocity estimates were estimated in the factor graph with respect to the arbitrary
Figure 8 shows the results for the principal axes estimation portion of the pipeline. The optimized value of
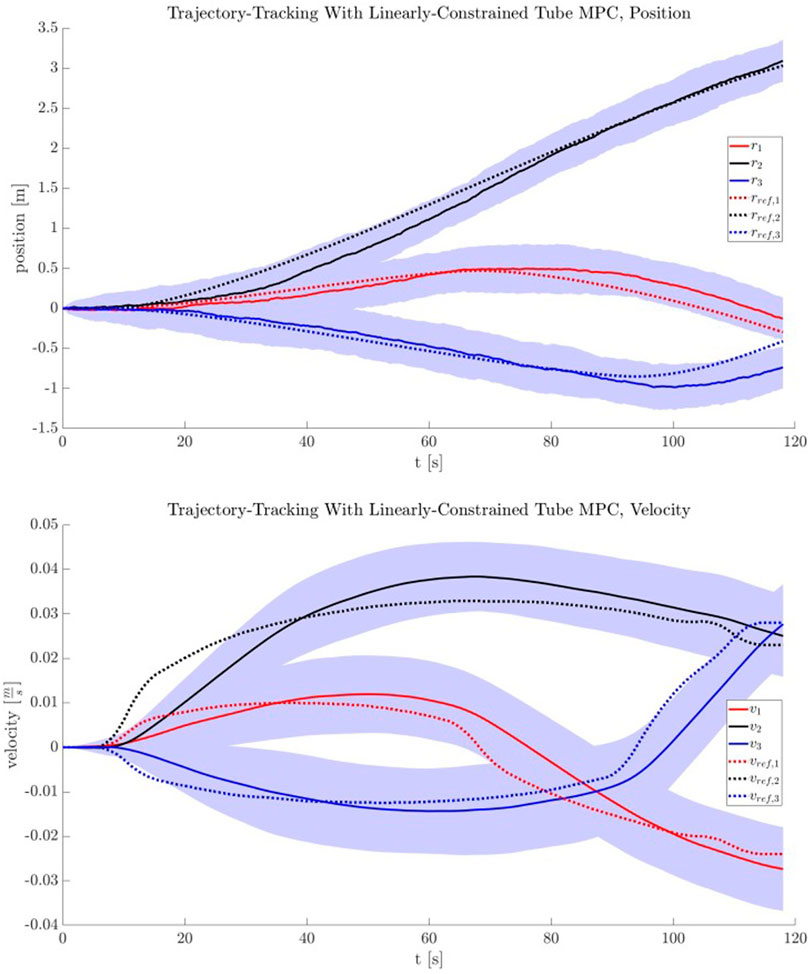
FIGURE 8. (A) Resulting polhode after alignment to the Target’s estimated principal axes. The polhode’s plane projections produce central conics (not rotated nor displaced from their respective origins). Solid circles indicate the polhode, and open circles indicate the projected conics. (B) Polhode comparison between the measured (blue, in geometric frame), aligned (red, after rotating by the estimated orientation from geometric to principal axes), and groundtruth-aligned (orange) curves. (C) Visual comparison of the offset between the groundtruth principal axes (bold RGB triad) against the estimated orientation (thin, longer RGB triad).
Table 1 shares estimation error statistics for the navigational states. The low magnitude of these values indicate successful performance of the on-orbit inspection task, which in turn would enable the subsequent motion planning and trajectory tracking with online-updating phases that are required to intercept the Target.
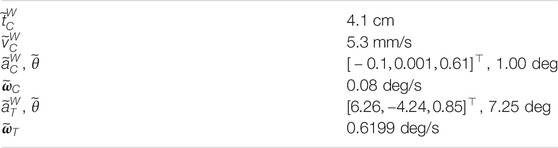
TABLE 1. Estimation error statistics for the navigational states. All error values are the median L2 norm between the estimated and true values, except for
4.2 Chaser Motion Planning Performance
The motion planner was validated and analyzed for performance. A few statistics are note-worthy within the above context.
First, for the chosen tuning of the NLP implementation in terms of the cost function accuracy (1e-8) and constraint gradient finite-difference step size (1e-10) and with a warm start provided by the LUT and nominal initial conditions for the Chaser, it is found that the planner produces motion plans for random queries of the Target parameters with a mean runtime of 0.84 s with a
For 1,000 queries with a warm start of the motion planner and the Chaser located at the nominal initial position, there is a 100% success rate in the optimizer converging to a feasible trajectory. For comparison, for the same sample size and Chaser initial position, but with a cold start, the success rate is 90%.
As the Chaser will be placed at its initial position manually, the effect of placement error has also been investigated. For
4.3 Uncertainty Bound and Robust Tube MPC Performance
A reference trajectory
The reference trajectory used is a long looping motion occurring over TumbleUCBound produces a
An ancillary gain matrix
The tightened constraints are passed off to the robust tube MPC, which computes a nominal MPC solution at each time step, supplemented by the action of the ancillary controller. A series of
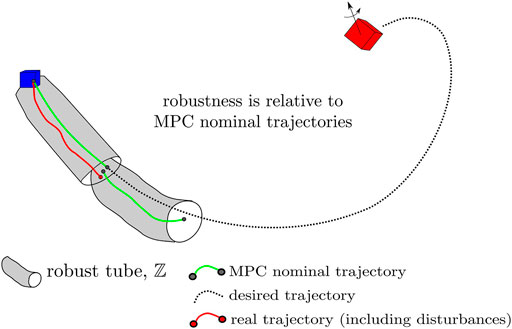
FIGURE 9. The position and velocity tracking performance for the robust tube MPC, with shading indicating 1-σ bounds of
4.4 The Full Pipeline: A Case Study Result
A case study is presented for a full pipeline run of the proposed rendezvous algorithm for a scenario representing planned testing on the ISS using NASA’s Astrobee robotic satellites. To provide additional context on the computing environment, the Astrobee Robot Software uses the Robotic Operating System (ROS) as middleware for communication, with approximately 50 nodelets running on two ARM processors (MLP and LLP). These processors run the general-purpose operating system Ubuntu 16.04 and ROS Kinetic with a sensor suite including time of flight cameras, IMUs, and more as previously detailed.
Simulation results for this scenario were obtained using NASA’s ROS/Gazebo-based Astrobee simulation environment. The simulation environment includes extensive modeling of Astrobee including its impeller propulsion system, onboard visual navigation, environmental disturbances, and many more true-to-life models Flückiger et al. (2018). The full rendezvous pipeline was implemented as an additional set of Python and C++ ROS nodes and nodelets that run alongside the default Astrobee flight software. Significant development effort was dedicated to architecting software that would be usable for both simulation and hardware testing Albee et al. (2020). It may be helpful to the reader to follow Figure 4, which fully delineates the flow of information in the rendezvous pipeline.
4.4.1 The Scenario
For this scenario it is assumed that the participant Astrobee robots have been placed at their respective starting positions within the Japanese Experiment Module (JEM) and are initially station-keeping. The relative distance between the two robots is
The Target performs a tri-axial tumble mimicking Envisat’s inertia
4.4.2 State and Principal Axes Estimation
The Chaser successfully observed the Target’s tumbling motion and provided accurate state estimates for both spacecraft throughout the entire maneuver. The observation period lasted 120 s to accumulate enough Target angular velocity estimates before determining the orientation of the principal axes. Figure 10 shows the time history of state estimates throughout the maneuver. The “snap” in Target’s attitude and angular velocity estimates is clearly evident when the principal axes are determined and proper alignment occurs. The average time taken for a factor graph update was 0.08 s on the same machine as Section 3.5. These values were then handed off to the Chaser motion planner.
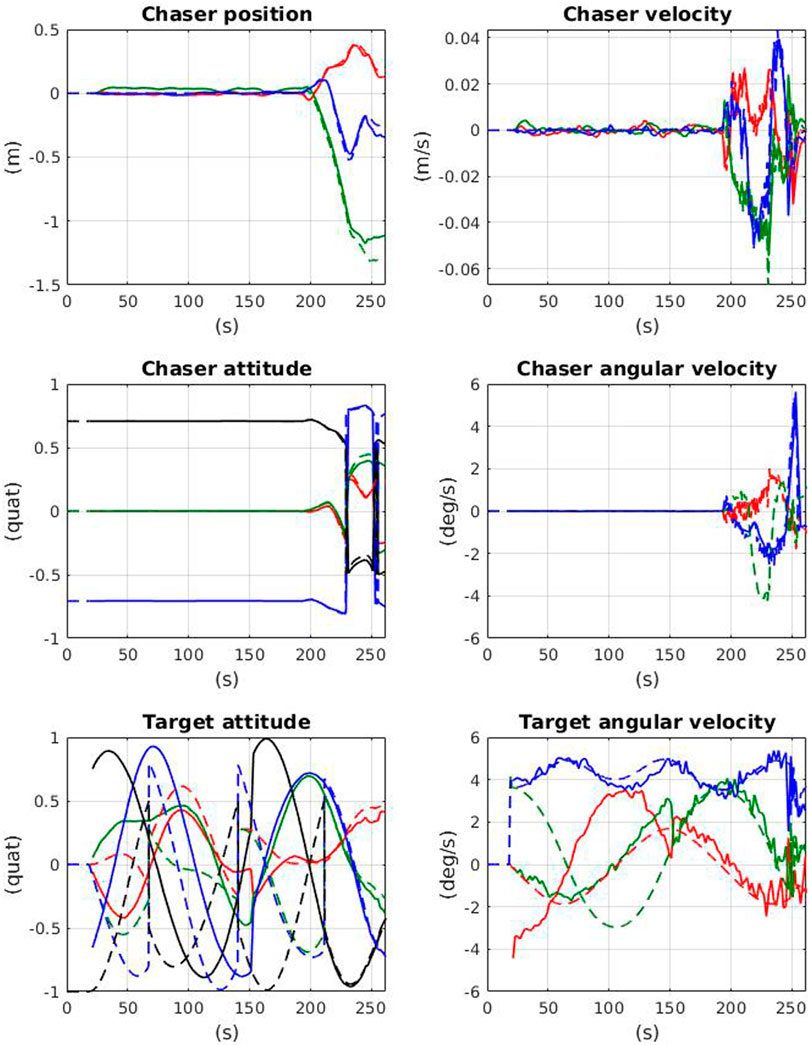
FIGURE 10. Chaser and Target state estimates over the time-history of the full pipeline demonstration. Solid lines indicate estimated values, dashed lines indicate simulator truth. Notice the “snap” that occurs in the Target estimates when the principal axes are determined (∼150 s).
4.4.3 Chaser Motion Planning
The estimated Target parameters and the measured Chaser and estimated Target positions in the inertial frame are of interest for the motion planner. The motion planner uses the LUT designed for a given set of Target parameters as indicated in Section 3.3 to determine the warm-start parameters for the given Target parameter query and from which a motion plan is developed. Included in this plan are Chaser states at each via point and a start time for the approach maneuver. A planned trajectory for this scenario is provided in Figure 11, using the outputs of the visual estimation procedure.
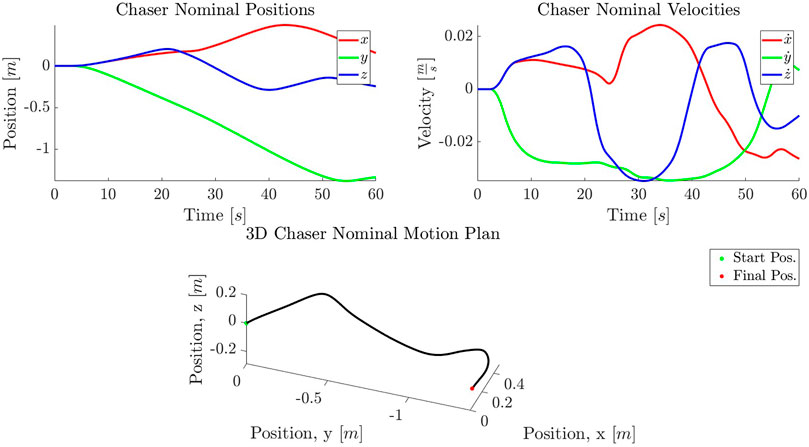
FIGURE 11. A planned trajectory in position (A) and velocity (B) for a tri-axial tumble query with inputs supplied by the Target estimation, with final Chaser position and velocity equal to that of the MP. The 3D representation of the trajectory is given (C). The trajectory is presented in the inertial frame.
For the tumble described in this case study, the motion planner produces plans with 100% success for random initial conditions. The mean time for plan generation for this scenario is 1.12 s and the
4.4.4 Uncertainty Bound and Robust Tube MPC
The resulting motion plan,
The first step in calculating these values is to determine the uncertainty bound,
Now,
In this case, a shrunken
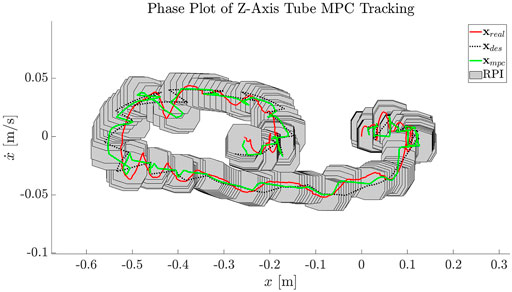
FIGURE 12. An example of the robust tube MPC maintaining the real
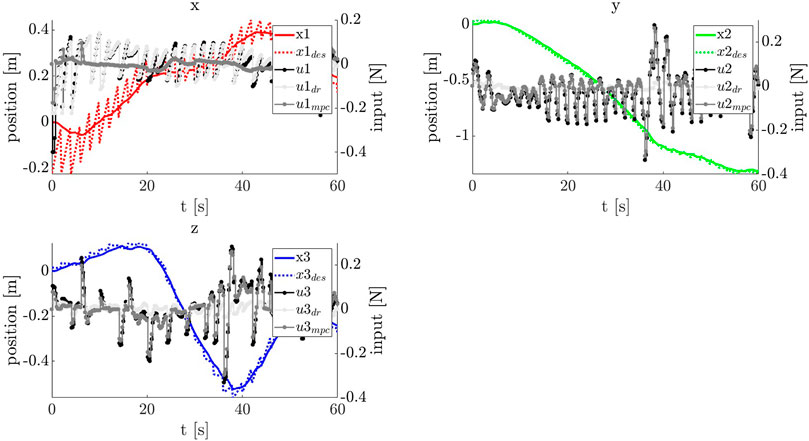
FIGURE 13. The input and state histories for the robust controller tracking the online-updated reference trajectory (dashed). It is important to remember that the reference trajectory in this scheme actually shifts in real-time as new SLAM estimates of the true Target attitude,
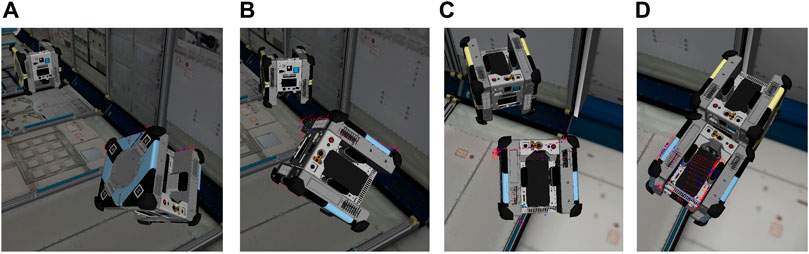
FIGURE 14. A timelapse of the rendezvous portion of the pipeline for an arbitrary tri-axial tumble. (A–D), the Chaser begins tracking the motion plan with its robust controller while periodically updating the inertial frame reference trajectory based on SLAM estimates of
5 Conclusion
The framework and algorithms proposed in this study are a significant step toward autonomous rendezvous with tumbling Targets, uniting multiple key algorithmic components of the autonomy pipeline. Furthermore, key uncertainty sources are considered throughout and robustness and constraint satisfaction despite these uncertainties are incorporated into the pipeline logic. The treatment of uncertainty due to imperfect Target estimation combined with online-updating is considered, along with the implications of choosing overly conservative uncertainty bounds. Planned ISS tests in mid-2021 on the Astrobee platform will provide extensive experimental validation of this study, which has been shown algorithmically defined here and demonstrated in a detailed simulation environment that directly transfers to the Astrobee hardware.
Some major lessons learned from the development of this framework include the need for early standardization and the practical difficulties of moving to hardware implementation. Hardware implementation is vital, giving a direct look at the actual sensors, noise, computational power, and environments that will be seen by the algorithms developed for autonomous systems. However, hardware implementation leads to many complications, particularly in moving from desktop-based computational tools to embedded programming that may be lacking important libraries or computational power for example. Additionally, because of the number of algorithmic components, standardization and message-passing procedures must be settled early in development; luckily, ROS takes care of some of this complexity on the Astrobee platform. Some practical lessons learned are further documented in (Albee et al., 2020).
Algorithmically, the estimation, motion planning, uncertainty propagation, and robust control components have been outlined in detail and their application to a relevant satellite system explained. Individual performance metrics have been analyzed, showing the effectiveness of each of these portions independently. Additionally, the full pipeline presented in Figure 4 has been shown, demonstrating success of the autonomous rendezvous procedure in a detailed simulation environment, in real-time. A significant next step is ISS demonstration of the proposed pipeline on Astrobee hardware.
An interesting future direction for this study from a motion planning and controls perspective is the determination of system unknowns during execution. Prior work in this area for robotic free-flyers has recently been proposed and is applicable here in the case of online motion planning that accounts for the learning of Target inertial properties and permitting online recomputation, for instance (Albee et al., 2019). As it stands, the robust rendezvous framework documented here creates a full framework of algorithms needed to perform autonomous rendezvous with uncertain tumbling targets and adds robustness and systems integration considerations to an important open problem in microgravity close proximity operations, and demonstrates its effectiveness in a detailed simulation environment. Future study will document the framework’s performance as it moves toward on-orbit hardware demonstration.
Data Availability Statement
The raw data supporting the conclusion of this article will be made available by the authors, without undue reservation.
Author Contributions
Development of the robust tube MPC method for tumbling reference tracking: KA, CO, and CS; uncertainty bound formulation for robust tube MPC: CO and KA; vision-based state and parameter estimation: CO, JT, and TT; NLP-based motion planning for tumbling docking: RLa and CS; systems integration and CONOPS: KA, CO, and IH; editing and oversight: RLi and RLa.
Funding
A portion of this work was sponsored by the NASA Space Technology Mission Directorate through a NASA Space Technology Research Fellowship under grant 80NSSC17K0077. The Draper Fellow Program also sponsored a portion of this work. Support for this work was also provided under DLR research agreement 67272241.
Conflict of Interest
CO was employed by the company The Charles Stark Draper Laboratory, Inc.
The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Publisher’s Note
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Acknowledgments
The authors would like to thank the NASA Ames Astrobee operations and development teams, as well as others at NASA Ames’ Intelligent Robotics Group (IRG) for their support, particularly Brian Coltin, Jose Benavides, Ruben Garcia Ruiz, and In Won Park. The authors also thank Alvar Saenz-Otero and David W. Miller for providing their insights. Research reported in this study was supported by the International Space Station U.S. National Laboratory under agreement number UA-2019-969. The authors gratefully acknowledge the support that enabled this research.
Footnotes
1The polhode is the path traced by the angular velocity vector of a rotating body on its inertia ellipsoid.
References
Aghili, F. (2012). A Prediction and Motion-Planning Scheme for Visually Guided Robotic Capturing of Free-Floating Tumbling Objects with Uncertain Dynamics. IEEE Trans. Robot. 28, 634–649. doi:10.1109/TRO.2011.2179581
Aghili, F. (2008). Optimal Control for Robotic Capturing and Passivation of a Tumbling Satellite with Unknown Dynamics. AIAA Guidance, Navigation Control. Conf. Exhibit. doi:10.2514/6.2008-7274
Aghili, F. (2020). Optimal Trajectories and Robot Control for Detumbling a Non-cooperative Satellite. J. Guidance, Control Dyn. 43, 981–988. doi:10.2514/1.g004758
Albee, K., Ekal, M., Ventura, R., and Linares, R. (2019). “Combining Parameter Identification and Trajectory Optimization: Real-Time Planning for Information Gain,” in ESA Advanced Space Technologies for Robotics and Automation (ASTRA) (Noordwijk, Netherlands: ESA).
Andersson, J. A. E., Gillis, J., Horn, G., Rawlings, J. B., and Diehl, M. (2019). CasADi: a Software Framework for Nonlinear Optimization and Optimal Control. Math. Prog. Comp. 11, 1–36. doi:10.1007/s12532-018-0139-4
Buckner, C., and Lampariello, R. (2018). “Tube-Based Model Predictive Control for the Approach Maneuver of a Spacecraft to a Free-Tumbling Target Satellite,” in Proceedings of the American Control Conference, 5690–5697. doi:10.23919/ACC.2018.8431558
Carlone, L., Kira, Z., Beall, C., Indelman, V., and Dellaert, F. (2014). “Eliminating Conditionally Independent Sets in Factor Graphs: A Unifying Perspective Based on Smart Factors,” in IEEE Intl. Conf. On Robotics and Automation (ICRA) (IEEE), 4290–4297. doi:10.1109/icra.2014.6907483
ESA (2015). Phase B1 of an Active Debris Removal mission (E. DEORBIT Mission). Noordwijk, Netherlands: Tech. rep., European Space Agency.
Fejzi, A., and Miller, D. W. (2008). Development of Control and Autonomy Algorithms for Autonomous Docking to Complex Tumbling Satellites. Cambridge, MA: Massachusetts Institute of Technology. Ph.D. thesis.
Flores-Abad, A., Ma, O., Pham, K., and Ulrich, S. (2014). A Review of Space Robotics Technologies for On-Orbit Servicing. Prog. Aerospace Sci. 68, 1–26. doi:10.1016/j.paerosci.2014.03.002
Flückiger, L., Browne, K., Coltin, B., Fusco, J., Morse, T., and Symington, A. (2018). Astrobee Robot Software: Enabling Mobile Autonomy on the ISS. Madrid, Spain: Tech. rep., National Aeronautics and Space Administration.
Forster, C., Carlone, L., Dellaert, F., and Scaramuzza, D. (2016). On-manifold Preintegration for Real-Time Visual–Inertial Odometry. IEEE Trans. Robotics 33, 1–21. doi:10.1109/TRO.2016.2597321
Fourie, D., Terán Espinoza, A., Kaess, M., and Leonard, J. J. (2020). “Characterizing Marginalization and Incremental Operations on the Bayes Tree,” in Intl. Workshop on the Algorithmic Foundations of Robotics (WAFR) (Finland: Springer), 1–16.
Fourie, D., Tweddle, B. E., Ulrich, S., and Saenz-Otero, A. (2014). Flight Results of Vision-Based Navigation for Autonomous Spacecraft Inspection of Unknown Objects. J. Spacecraft Rockets 51, 2016–2026. doi:10.2514/1.a32813
Hillenbrand, U., and Lampariello, R. (2005). Motion and Parameter Estimation of a Free-Floating Space Object from Range Data for Motion Prediction. Munich, Germany: European Space Agency, (Special Publication) ESA SP, 461–470.
Hurtado, J. E., and Satak, N. (2011). “Poinsot Motion Attitude,” in International Conference on Computational & Experimental Engineering and Sciences. Vol. 16.
Johnson, S. (2017). The Nlopt Nonlinear-Optimization Package. Available at: http://github.com/stevengj/nlopt.version 2.4.2.
Kaess, M., Ila, V., Roberts, R., and Dellaert, F. (2010). “The Bayes Tree: An Algorithmic Foundation for Probabilistic Robot Mapping,” in Algorithmic Foundations of Robotics IX. Springer Tracts in Advanced Robotics. Editors D. Hsu, V. Isler, J. C. Latombe, and M. C. Lin (Berlin: Springer) Vol. 68, 1–17. doi:10.1007/978-3-642-17452-0_10
Kaess, M., Johannsson, H., Roberts, R., Ila, V., Leonard, J., and Dellaert, F. (2012). iSAM2: Incremental Smoothing and Mapping Using the Bayes Tree. Intl. J. Robotics Res. (Ijrr) 31, 217–236. doi:10.1177/0278364911430419
Kaess, M., Ranganathan, A., and Dellaert, F. (2008). iSAM: Incremental Smoothing and Mapping. IEEE Trans. Robot. 24, 1365–1378. doi:10.1109/tro.2008.2006706
Lampariello, R., Mishra, H., Oumer, N., and Peters, J. (2021). Robust Motion Prediction of a Free-Tumbling Satellite with On-Ground Experimental Validation (Accepted). J. Guidance, Control. Dyn. 1–17. doi:10.2514/1.G005745
Lampariello, R. (2010). Motion Planning for the On-Orbit Grasping of a Non-cooperative Target Satellite with Collision Avoidance. Int. Symp. Artif. Intelligence, Robotics Automation Space 1, 636–643.
Limon, D., Alvarado, I., Alamo, T., and Camacho, E. F. (2008). On the Design of Robust Tube-Based MPC for Tracking. IFAC Proc. Volumes 41, 15333–15338. doi:10.3182/20080706-5-kr-1001.02593
Lupton, T., and Sukkarieh, S. (2011). Visual-inertial-aided Navigation for High-Dynamic Motion in Built Environments without Initial Conditions. IEEE Trans. Robotics 28, 61–76. doi:10.1109/TRO.2011.2170332
Majumdar, A., and Tedrake, R. (2017). Funnel Libraries for Real-Time Robust Feedback Motion Planning. Int. J. Robotics Res. 36, 947–982. doi:10.1177/0278364917712421
Mammarella, M., Capello, E., Park, H., Guglieri, G., and Romano, M. (2018). Tube-based Robust Model Predictive Control for Spacecraft Proximity Operations in the Presence of Persistent Disturbance. Aerospace Sci. Tech. 77, 585–594. doi:10.1016/j.ast.2018.04.009
Mascellani, G. (2019). Boost. Available at: https://www.boost.org/.version 1.71.0
Mayne, D. Q., Kerrigan, E. C., and Falugi, P. (2011). Robust Model Predictive Control: Advantages and Disadvantages of Tube-Based Methods. IFAC Proc. Volumes 44, 191–196. doi:10.3182/20110828-6-IT-1002.01893
NASA (2015). Reference Guide to the International Space Station. Washington, DC: Tech. rep., National Aeronautics and Space Administration.
Park, H., Zappulla, R., Zagaris, C., Virgili-Llop, J., and Romano, M. (2017). “Nonlinear Model Predictive Control for Spacecraft Rendezvous and Docking with a Rotating Target,” in 27th AAS/AIAA Space Flight Mechanics Meeting (San Antonio, TX, USA: AIAA), 1–14.
Rusu, R. B., Blodow, N., and Beetz, M. (2009). “Fast point Feature Histograms (Fpfh) for 3d Registration,” in 2009 IEEE International Conference on Robotics and Automation (Kobe) (IEEE), 3212–3217. doi:10.1109/robot.2009.5152473
Saenz-Otero, A., and Miller, D. W. (2005). Design Principles for the Development of Space Technology Maturation Laboratories Aboard the International Space Station. Cambridge, MA: Massachusetts Institute of Technology. Ph.D. thesis.
Setterfield, T. P., Miller, D. W., Leonard, J. J., and Saenz-Otero, A. (2018a). Mapping and Determining the center of Mass of a Rotating Object Using a Moving Observer. Int. J. Robotics Res. 37, 83–103. doi:10.1177/0278364917749024
Setterfield, T. P., and Miller, D. W. (2017). On-Orbit Inspection of a Rotating Object Using a Moving Observer. Cambridge, MA: Massachusetts Institute of Technology. Ph.D. thesis.
Setterfield, T. P., Miller, D. W., Saenz-Otero, A., Frazzoli, E., and Leonard, J. J. (2018b). Inertial Properties Estimation of a Passive On-Orbit Object Using Polhode Analysis. J. Guidance, Control Dyn. 41, 2214–2231. doi:10.2514/1.G003394
Smith, R. (2009). Open Dynamics Engine. Available at: http://www.ode.org/.version 0.11.
Sternberg, D. C., and Miller, D. (2018). Parameterization of Fuel-Optimal Synchronous Approach Trajectories to Tumbling Targets. Front. Robot. AI 5, 1–11. doi:10.3389/frobt.2018.00033
Stoneman, S., and Lampariello, R. (2016). “A Nonlinear Optimization Method to Provide Real-Time Feasible Reference Trajectories to Approach a Tumbling Target Satellite,” in 2016 International Symposium on Artificial Intelligence, Robotics and Automation in Space (Beijing, P.R. China: AIRAS), 1–10.
Sullivan, B. R., Kelm, B., Roesler, G., and Henshaw, C. G. (2015). “Darpa Robotic Space Servicer: On-Demand Gapabilities in Geo,” in AIAA SPACE 2015 Conference and Exposition (Pasadena, CA: AIAA).
Terán Espinoza, A., Hettrick, H., Albee, K., Hernandez, A. C., and Linares, R. (2019). “End-to-End Framework for Close Proximity In-Space Robotic Missions,” in International Astronautical Congress (IAC) (Washington, D.C.: IAC), 1–13.
Terán Espinoza, A. (2020). Versatile Inference Algorithms Using the Bayes Tree for Robot Navigation. Cambridge, MA: Massachusetts Institute of Technology. Ph.D. thesis.
Tweddle, B. E., Saenz-Otero, A., Leonard, J. J., and Miller, D. W. (2015). Factor Graph Modeling of Rigid-Body Dynamics for Localization, Mapping, and Parameter Estimation of a Spinning Object in Space. J. Field Robotics 32, 897–933. doi:10.1002/rob.21548
Tweddle, B. E., Setterfield, T. P., Saenz-Otero, A., and Miller, D. W. (2016). An Open Research Facility for Vision-Based Navigation Onboard the International Space Station. J. Field Robotics 33, 157–186. doi:10.1002/rob.21622
Ventura, J., Romano, M., and Walter, U. (2015). Performance Evaluation of the Inverse Dynamics Method for Optimal Spacecraft Reorientation. Acta Astronautica 110, 266–278. doi:10.1016/j.actaastro.2014.11.041
Keywords: space robotics, motion planning, robust tube MPC, visual estimation, on-orbit servicing, planning under uncertainty
Citation: Albee K, Oestreich C, Specht C, Terán Espinoza A, Todd J, Hokaj I, Lampariello R and Linares R (2021) A Robust Observation, Planning, and Control Pipeline for Autonomous Rendezvous with Tumbling Targets. Front. Robot. AI 8:641338. doi: 10.3389/frobt.2021.641338
Received: 14 December 2020; Accepted: 12 July 2021;
Published: 17 September 2021.
Edited by:
Behcet Acikmese, University of Washington, United StatesReviewed by:
Saptarshi Bandyopadhyay, NASA Jet Propulsion Laboratory (JPL), United StatesTommaso Guffanti, Stanford University, United States
Copyright © 2021 Albee, Oestreich, Specht, Terán Espinoza, Todd, Hokaj, Lampariello and Linares. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Keenan Albee, YWxiZWVAbWl0LmVkdQ==; Charles Oestreich, Y29lc3RyZWlAbWl0LmVkdQ==
†These authors have contributed equally to this work