 Brock Laschowski
Brock Laschowski William McNally
William McNally Alexander Wong1,2
Alexander Wong1,2 John McPhee
John McPhee
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
DATA REPORT article
Front. Robot. AI , 03 December 2020
Sec. Biomedical Robotics
Volume 7 - 2020 | https://doi.org/10.3389/frobt.2020.562061
This article is part of the Research Topic Interfacing Humans and Machines for Rehabilitation and Assistive Devices View all 19 articles
Hundreds of millions of individuals worldwide have mobility impairments resulting from degenerative aging and/or neuro-musculoskeletal disorders (Grimmer et al., 2019). Fortunately, robotic lower-limb exoskeletons and prostheses can allow otherwise wheelchair-bound seniors and rehabilitation patients to perform movements that involve net positive mechanical work (e.g., climbing stairs and standing from a seated position) using onboard actuators and intelligent control systems (Tucker et al., 2015; Young and Ferris, 2017; Laschowski and Andrysek, 2018; Krausz and Hargrove, 2019; Zhang et al., 2019a). Generally speaking, the high-level controller recognizes the patient's locomotion mode (intention) by analyzing real-time measurements from wearable sensors using machine learning algorithms. The mid-level controller then translates the locomotion intentions into mode-specific reference trajectories. This control level typically comprises a finite state machine, which implements a discrete parametrized control law (e.g., joint position or mechanical impedance control) for each locomotion mode. Finally, the low-level controller tracks the reference trajectories and minimizes the signal error by modulating the device actuators using feedforward and feedback control loops (Tucker et al., 2015; Young and Ferris, 2017; Laschowski and Andrysek, 2018; Krausz and Hargrove, 2019; Zhang et al., 2019a).
Accurate transitions between different locomotion modes is important since even rare misclassifications can cause loss-of-balance and injury. In many commercial devices like the ReWalk and Indego lower-limb exoskeletons, the patient acts as the high-level controller by performing volitional movements to manually switch between locomotion modes (Tucker et al., 2015; Young and Ferris, 2017). These human-controlled methods can be time-consuming, inconvenient, and cognitively demanding. Researchers have recently developed automated locomotion mode recognition systems using wearable sensors like inertial measurement units (IMUs) and surface electromyography (EMG) to automatically switch between different locomotion modes (Tucker et al., 2015; Young and Ferris, 2017; Laschowski and Andrysek, 2018; Krausz and Hargrove, 2019; Zhang et al., 2019a). Whereas mechanical and inertial sensors respond to the patient's movements, the electrical potentials of biological muscles, as recorded using surface EMG, precede movement initiation and thus could (marginally) predict locomotion mode transitions. Several researchers have combined mechanical sensors with surface EMG for automated locomotion mode recognition. Such neuromuscular-mechanical data fusion has improved the locomotion mode recognition accuracies and decision times compared to implementing either system individually (Huang et al., 2011; Du et al., 2012; Wang et al., 2013; Liu et al., 2016). However, these measurements are still patient-dependent, and surface EMG are susceptible to fatigue, changes in electrode-skin conductivity, and crosstalk from adjacent muscles (Tucker et al., 2015).
Supplementing neuromuscular-mechanical data with information about the upcoming walking environment could improve the high-level control performance. Similar to the human visual system, environment sensing would precede modulation of the patient's muscle activations and/or walking biomechanics, therein enabling more accurate and real-time locomotion mode transitions. Environment sensing could also be used to adapt low-level reference trajectories (e.g., changing toe clearance corresponding to an obstacle height) (Zhang et al., 2020) and optimal path planning (e.g., identifying opportunities for energy regeneration) (Laschowski et al., 2019a, 2020a). Preliminary research has shown that supplementing an automated locomotion mode recognition system with environment information can improve the classification accuracies and decision times compared to excluding terrain information (Huang et al., 2011; Wang et al., 2013; Liu et al., 2016). Several researchers have explored using radar detectors (Kleiner et al., 2018) and laser rangefinders (Zhang et al., 2011; Wang et al., 2013; Liu et al., 2016) for environment sensing. However, vision-based systems can provide more detailed information about the field-of-view and detect physical obstacles in peripheral locations. Most environment recognition systems have included either RGB cameras (Krausz and Hargrove, 2015; Diaz et al., 2018; Khademi and Simon, 2019; Laschowski et al., 2019b; Novo-Torres et al., 2019; Da Silva et al., 2020; Zhong et al., 2020) or 3D depth cameras (Krausz et al., 2015, 2019; Varol and Massalin, 2016; Hu et al., 2018; Massalin et al., 2018; Zhang et al., 2019b,c,d).
For image classification, researchers have used learning-based algorithms like support vector machines (Varol and Massalin, 2016; Massalin et al., 2018) and deep convolutional neural networks (Rai and Rombokas, 2018; Khademi and Simon, 2019; Laschowski et al., 2019b; Novo-Torres et al., 2019; Zhang et al., 2019b,c,d; Zhong et al., 2020). Although convolutional neural networks typically outperform support vector machines for image classification (LeCun et al., 2015), deep learning requires significant and diverse training images to prevent overfitting and promote generalization. Deep learning has become pervasive ever since AlexNet (Krizhevsky et al., 2012) popularized convolutional neural networks by winning the 2012 ImageNet challenge. ImageNet is an open-source dataset containing ~15 million labeled images and 22,000 different classes (Deng et al., 2009). The lack of an open-source, large-scale dataset of human locomotion environment images has impeded the development of environment-aware control systems for robotic lower-limb exoskeletons and prostheses. Until now, researchers have been required to individually collect training images to develop their classification algorithms. These repetitive measurements are time-consuming and inefficient, and individual private datasets have prevented comparisons between classification algorithms from different researchers (Laschowski et al., 2020b). Drawing inspiration from ImageNet, we developed ExoNet–the first open-source, large-scale hierarchical database of high-resolution wearable camera images of human walking environments. In accordance with the Frontiers submission guidelines, this article provides a detailed description of the research dataset. Benchmark performance and analyses of the ExoNet database for human locomotion environment classification will be presented in future work.
One subject was instrumented with a lightweight wearable smartphone camera system (iPhone XS Max); photograph shown in Figure 1A. Unlike limb-mounted systems (Zhang et al., 2011, 2019b,c; Varol and Massalin, 2016; Diaz et al., 2018; Hu et al., 2018; Kleiner et al., 2018; Massalin et al., 2018; Rai and Rombokas, 2018; Da Silva et al., 2020), chest-mounting can provide more stable video recording and allow users to wear pants and long dresses without obstructing the sampled field-of-view. The chest-mount height was ~1.3 m from the ground when the participant stood upright. The smartphone contains two 12-megapixel RGB rear-facing cameras and one 7-megapixel front-facing camera. The front and rear cameras provide 1,920 × 1,080 and 1,280 × 720 video recording at 30 frames/s, respectively. The smartphone weighs ~0.21 kg, and features an onboard rechargeable lithium-ion battery, 512-GB of memory storage, and a 64-bit ARM-based integrated circuit (Apple A12 Bionic) with six-core CPU and four-core GPU. These hardware specifications can support onboard machine learning for real-time environment classification. The relatively lightweight and unobtrusive nature of the wearable camera system allowed for unimpeded human walking biomechanics. Ethical review and approval were not required for this research in accordance with the University of Waterloo Office of Research Ethics.
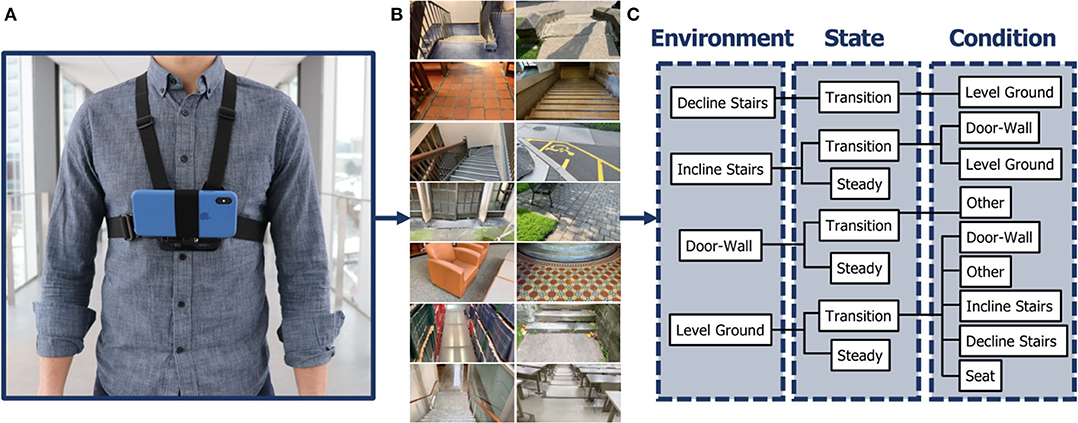
Figure 1. Development of the ExoNet database, including (A) photograph of the wearable camera system used for large-scale data collection; (B) examples of the high-resolution RGB images (1,280 × 720) of human walking environments; and (C) schematic of the 12-class hierarchical labeling architecture.
While most environment recognition systems have been limited to controlled indoor environments and/or prearranged walking circuits (Zhang et al., 2011, 2019b,c,d; Du et al., 2012; Wang et al., 2013; Krausz et al., 2015, 2019; Liu et al., 2016; Hu et al., 2018; Kleiner et al., 2018; Khademi and Simon, 2019), our subject walked around unknown outdoor and indoor real-world environments while collecting images with occlusions, signal noise, and intraclass variations. Data were collected at various times throughout the day to incorporate different lighting conditions. Similar to human gaze fixation during walking (Li et al., 2019), the sampled field-of-view was ~1–5 meters ahead of the participant, thereby showing upcoming walking environments rather than the ground underneath the subject's feet. The camera's pitch angle slightly differed between data collection sessions. Images were sampled at 30 Hz with 1,280 × 720 resolution. More than 52 h of video were recorded, amounting to ~5.6 million images (examples shown in Figure 1B). The same environment was never sampled twice to maximize diversity among the ExoNet images. Data were collected throughout the summer, fall, and winter seasons to incorporate different weathered surfaces like snow, grass, and multicolored leaves. In accordance with the Frontiers submission guidelines, the ExoNet database was deposited in a public repository (IEEE DataPort) and is available for download at https://ieee-dataport.org/open-access/exonet-database-wearable-camera-images-human-locomotion-environments. The file size of the uncompressed videos is ~140 GB.
Given the subject's preferred walking speed, there were minimal differences between consecutive images sampled at 30 Hz. The labeled images were therefore downsampled to 5 frames/s to minimize the demands of manual annotation and increase the diversity in image appearances. However, for real-time environment classification and control of robotic lower-limb exoskeletons and prostheses, higher sampling rates would be more advantageous for accurate locomotion mode recognition and transitioning. Similar to ImageNet (Deng et al., 2009), the ExoNet database was human-annotated using a hierarchical labeling architecture (see Figure 1C). Images were labeled according to exoskeleton and prosthesis control functionality, rather than a purely computer vision perspective. For instance, images of level-ground environments showing either pavement or grass were not differentiated since both surfaces would use the same level-ground walking state controller. In contrast, computer vision researchers might label these different surface textures as separate classes.
Approximately 923,000 images in ExoNet were manually labeled and organized into 12 classes using the following descriptions, which also include the number of labeled images/class: {IS-T-DW = 31,628} shows incline stairs with a door and/or wall; {IS-T-LG = 11,040} shows incline stairs with level-ground thereafter; {IS-S = 17,358} shows only incline stairs; {DS-T-LG = 28,677} shows decline stairs with level-ground thereafter; {DW-T-O = 19,150} shows a door and/or wall with other (e.g., hand or window); {DW-S = 36,710} shows only a door and/or wall; {LG-T-DW = 379,199} shows level-ground with a door and/or wall; {LG-T-O = 153,263} shows level-ground with other (e.g., humans, cars, bicycles, or garbage cans); {LG-T-IS = 26,067} shows level-ground with incline stairs thereafter; {LG-T-DS = 22,607} shows level-ground with decline stairs thereafter; {LG-T-SE = 119,515} shows level-ground with seats (e.g., couches, chairs, or benches); and {LG-S = 77,576} shows only level-ground. These classes were selected to encompass the different walking environments encountered during the data collection sessions. We included the other class to improve image classification performance when confronted with non-terrain related features like humans or bicycles.
Inspired by previous work (Huang et al., 2011; Du et al., 2012; Wang et al., 2013; Liu et al., 2016; Khademi and Simon, 2019), the hierarchical labeling architecture included both steady (S) and transition (T) states. A steady state describes an environment where an exoskeleton or prosthesis user would continuously perform the same locomotion mode (e.g., only level-ground terrain). In contrast, a transition state describes an environment where the exoskeleton or prosthesis high-level controller might switch between different locomotion modes (e.g., level-ground and incline stairs). Manually labeling the transition states was relatively subjective. For example, an image showing level-ground terrain was labeled level-ground-transition-incline stairs (LG-T-IS) when an incline staircase was approximately within the sampled field-of-view and forward-facing. Similar labeling principles were applied to transitions to other conditions. The Python code used for labeling the ExoNet database was uploaded to GitHub and is publicly available for download at https://github.com/BrockLaschowski2/ExoNet.
Environment recognition systems can improve the control of robotic lower-limb exoskeletons and prostheses during human locomotion. However, small-scale and private training datasets have impeded the widespread development and dissemination of image classification algorithms for human locomotion environment recognition. Motivated by these limitations, we developed ExoNet–the first open-source, large-scale hierarchical database of high-resolution wearable camera images of human walking environments. Using a lightweight wearable camera system, we collected over 5.6 million RGB images of different indoor and outdoor real-world walking environments, of which ~923,000 images were human-annotated using a 12-class hierarchical labeling architecture. Available publicly through IEEE DataPort, ExoNet provides researchers an unprecedented communal platform to develop and compare next-generation image classification algorithms for human locomotion environment recognition. Although ExoNet was originally designed for environment-aware control systems for lower-limb exoskeletons and prostheses, applications could extend to humanoids and autonomous legged robots (Park et al., 2015; Villarreal et al., 2020). Users of the ExoNet database are requested to reference this dataset report.
Aside from being the only open-source image database of human locomotion environments, the large scale and diversity of ExoNet significantly distinguishes itself from previous environment recognition systems, as illustrated in Table 1. ExoNet contains ~923,000 individually labeled images. In comparison, the previous largest dataset contained ~402,000 images (Massalin et al., 2018). While most environment recognition systems have included fewer than six classes (Krausz and Hargrove, 2015; Krausz et al., 2015, 2019; Varol and Massalin, 2016; Massalin et al., 2018; Khademi and Simon, 2019; Laschowski et al., 2019b; Novo-Torres et al., 2019; Zhang et al., 2019b,c,d; Zhang et al., 2020), the ExoNet database features a 12-class hierarchical labeling architecture. These differences have real-world implications given that learning-based algorithms like convolutional neural networks require significant and diverse training images (LeCun et al., 2015). The spatial resolution of the ExoNet images (1,280 × 720) is considerably higher than previous efforts (e.g., 224 × 224 and 320 × 240). Poor image resolution has been attributed to decreased classification accuracy of human walking environments (Novo-Torres et al., 2019). Although higher resolution images can increase the computational and memory storage requirements, that being unfavorable for real-time mobile computing, researchers have been moving toward the development of efficient convolutional neural networks that require fewer operations (Tan and Le, 2020), therein enabling the processing of larger images for relatively similar computational power. Here we assume mobile computing for the exoskeleton and prosthesis control (i.e., untethered and no wireless communication to cloud computing). Nevertheless, an exoskeleton or prosthesis controller may not always benefit from additional information provided by higher resolution images, particularly when interacting with single surface textures (i.e., only pavement or grass). With ongoing research and development in computer vision and artificial intelligence, larger and more challenging training datasets are needed to develop better image classification algorithms for environment-aware locomotor control systems.
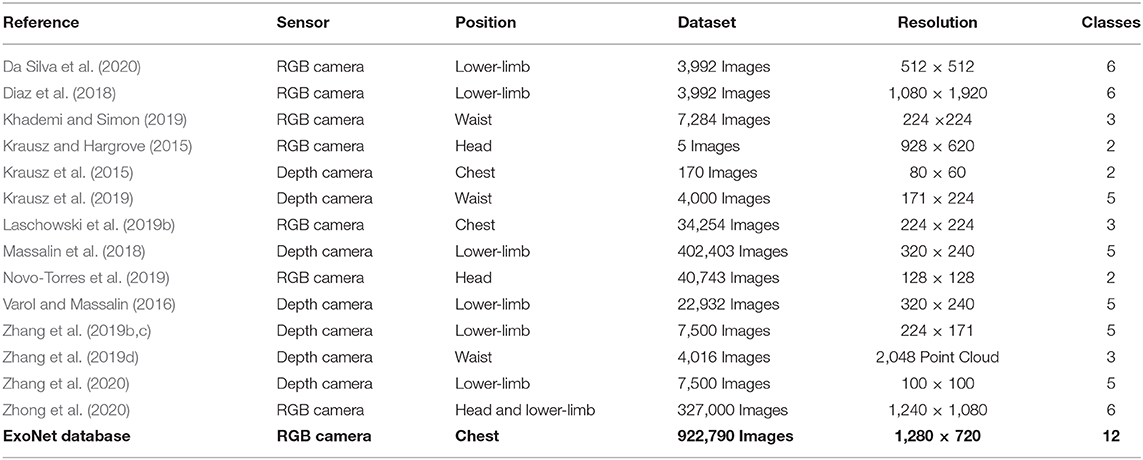
Table 1. Comparison of the ExoNet database with previous environment recognition systems for robotic lower-limb prostheses and exoskeletons.
A potential limitation of the ExoNet database is the two-dimensional nature of the environment information. Whereas RGB cameras measure light intensity information, depth cameras also provide distance measurements (Krausz et al., 2015, 2019; Varol and Massalin, 2016; Hu et al., 2018; Massalin et al., 2018; Zhang et al., 2019b,c,d). Depth cameras work by emitting infrared light and calculate distances by measuring the light time-of-flight between the camera and physical environment (Varol and Massalin, 2016). Depth measurement accuracies typically degrade in outdoor lighting conditions (e.g., sunlight) and with increasing measurement distance. Consequently, most environment recognition systems using depth cameras have been tested in indoor environments (Krausz et al., 2015, 2019; Varol and Massalin, 2016; Hu et al., 2018; Massalin et al., 2018) and have had limited capture volumes (i.e., between 1 and 2 m of maximum range imaging) (Krausz et al., 2015; Varol and Massalin, 2016; Massalin et al., 2018). Assuming mobile computing, the application of depth cameras for environment sensing would also require robotic lower-limb exoskeletons and prostheses to have embedded microcontrollers with significant computing power and minimal power consumption, the specifications of which are not supported by existing untethered systems (Massalin et al., 2018). These practical limitations motivated our decision to use RGB images.
Our camera images could be fused with the smartphone IMU measurements to improve high-level control performance. For example, if an exoskeleton or prosthesis user unexpectedly stops while walking toward an incline staircase, the acceleration measurements would indicate static standing rather than stair ascent, despite the staircase being accurately detected in the field-of-view. Since environment information does not explicitly represent the locomotor intent, environment recognition systems should supplement, rather than replace, the automated locomotion mode recognition systems based on patient-dependant measurements like mechanical and inertial sensors. The smartphone IMU measurements could also be used for sampling rate control (Zhang et al., 2011; Diaz et al., 2018; Khademi and Simon, 2019; Da Silva et al., 2020). Faster walking speeds would likely benefit from higher sampling rates for continuous classification. In contrast, static standing does not necessarily require environment information and therefore the smartphone camera could be powered down, or the sampling rate decreased, to minimize the computational and memory storage requirements. However, the optimal method for fusing the smartphone camera images with the onboard IMU measurements remains to be determined.
The datasets presented in this study can be found in online repositories. The names of the repository/repositories and accession number(s) can be found below: https://ieee-dataport.org/open-access/exonet-database-wearable-camera-images-human-locomotion-environments. The name of the online repository is “IEEE DataPort” and the name of the image database is “ExoNet”.
Ethical review and approval was not required for the study on human participants in accordance with the local legislation and institutional requirements. Written informed consent for participation was not required for this study in accordance with the national legislation and the institutional requirements.
BL was responsible for the study design, literature review, data collection, image labeling, data interpretation, and manuscript writing. WM assisted with the study design, image labeling, data interpretation, and manuscript writing. AW and JM assisted with the study design, data interpretation, and manuscript writing. All authors read and approved the final manuscript.
This research was funded by the Natural Sciences and Engineering Research Council of Canada (NSERC), the Waterloo Engineering Excellence Ph.D. Fellowship, JM's Tier I Canada Research Chair in Biomechatronic System Dynamics, and AW's Tier II Canada Research Chair in Artificial Intelligence and Medical Imaging.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Da Silva, R. L., Starliper, N., Zhong, B., Huang, H. H., and Lobaton, E. (2020). Evaluation of embedded platforms for lower limb prosthesis with visual sensing capabilities. arXiv [Preprint]. arXiv:2006.15224.
Deng, J., Dong, W., Socher, R., Li, L. J., Li, K., and Fei-Fei, L. (2009). “ImageNet: a large-scale hierarchical image database,” in IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (Miami, FL: IEEE), 248–255. doi: 10.1109/CVPR.2009.5206848
Diaz, J. P., Da Silva, R. L., Zhong, B., Huang, H. H., and Lobaton, E. (2018). “Visual terrain identification and surface inclination estimation for improving human locomotion with a lower-limb prosthetic,” in Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Honolulu, HI: IEEE), 1817–1820. doi: 10.1109/EMBC.2018.8512614
Du, L., Zhang, F., Liu, M., and Huang, H. (2012). Toward design of an environment-aware adaptive locomotion-mode-recognition system. IEEE. Trans. Biomed. Eng. 59, 2716–2725. doi: 10.1109/TBME.2012.2208641
Grimmer, M., Riener, R., Walsh, C. J., and Seyfarth, A. (2019). Mobility related physical and functional losses due to aging and disease - a motivation for lower limb exoskeletons. J. Neuroeng. Rehabil. 16:2. doi: 10.1186/s12984-018-0458-8
Hu, B. H., Krausz, N. E., and Hargrove, L. J. (2018). “A novel method for bilateral gait segmentation using a single thigh-mounted depth sensor and IMU,” in IEEE International Conference on Biomedical Robotics and Biomechatronics (BIOROB) (Enschede: IEEE), 807–812. doi: 10.1109/BIOROB.2018.8487806
Huang, H., Dou, Z., Zheng, F., and Nunnery, M. J. (2011). “Improving the performance of a neural-machine interface for artificial legs using prior knowledge of walking environment,” in Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Boston, MA: IEEE), 4255–4258. doi: 10.1109/IEMBS.2011.6091056
Khademi, G., and Simon, D. (2019). “Convolutional neural networks for environmentally aware locomotion mode recognition of lower-limb amputees,” in ASME Dynamic Systems and Control Conference (DSCC) (Park City, UT: ASME), 11. doi: 10.1115/DSCC2019-9180
Kleiner, B., Ziegenspeck, N., Stolyarov, R., Herr, H., Schneider, U., and Verl, A. (2018). “A radar-based terrain mapping approach for stair detection towards enhanced prosthetic foot control,” in IEEE International Conference on Biomedical Robotics and Biomechatronics (BIOROB) (Enschede: IEEE), 105–110. doi: 10.1109/BIOROB.2018.8487722
Krausz, N. E., and Hargrove, L. J. (2015). “Recognition of ascending stairs from 2D images for control of powered lower limb prostheses,” in International IEEE/EMBS Conference on Neural Engineering (NER) (Montpellier: IEEE), 615–618. doi: 10.1109/NER.2015.7146698
Krausz, N. E., and Hargrove, L. J. (2019). A survey of teleceptive sensing for wearable assistive robotic devices. Sensors 19:5238. doi: 10.3390/s19235238
Krausz, N. E., Hu, B. H., and Hargrove, L. J. (2019). Subject- and environment-based sensor variability for wearable lower-limb assistive devices. Sensors 19:4887. doi: 10.3390/s19224887
Krausz, N. E., Lenzi, T., and Hargrove, L. J. (2015). Depth sensing for improved control of lower limb prostheses. IEEE. Trans. Biomed. Eng. 62, 2576–2587. doi: 10.1109/TBME.2015.2448457
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). “ImageNet classification with deep convolutional neural networks,” in Advances in Neural Information Processing Systems Conference (NIPS) (Lake Tahoe, NV), 1097–1105. doi: 10.1145/3065386
Laschowski, B., and Andrysek, J. (2018). “Electromechanical design of robotic transfemoral prostheses,” in ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference (IDETC-CIE) (Quebec City: ASME), V05AT07A054. doi: 10.1115/DETC2018-85234
Laschowski, B., McNally, W., Wong, A., and McPhee, J. (2019b). “Preliminary design of an environment recognition system for controlling robotic lower-limb prostheses and exoskeletons,” in IEEE International Conference on Rehabilitation Robotics (ICORR) (Toronto: IEEE), 868–873. doi: 10.1109/ICORR.2019.8779540
Laschowski, B., McNally, W., Wong, A., and McPhee, J. (2020b). “Comparative analysis of environment recognition systems for control of lower-limb exoskeletons and prostheses,” in IEEE International Conference on Biomedical Robotics and Biomechatronics (BIOROB) (New York City, NY: IEEE). doi: 10.1109/BioRob49111.2020.9224364
Laschowski, B., McPhee, J., and Andrysek, J. (2019a). Lower-limb prostheses and exoskeletons with energy regeneration: mechatronic design and optimization review. ASME J. Mech. Robot. 11:040801. doi: 10.1115/1.4043460
Laschowski, B., Razavian, R. S., and McPhee, J. (2020a). Simulation of stand-to-sit biomechanics for design of lower-limb exoskeletons and prostheses with energy regeneration. bioRxiv. doi: 10.1101/801258
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learning. Nature 521, 436–444. doi: 10.1038/nature14539
Li, M., Zhong, B., Liu, Z., Lee, I. C., Fylstra, B. L., Lobaton, E., et al. (2019). “Gaze fixation comparisons between amputees and able-bodied individuals in approaching stairs and level-ground transitions: a pilot study,” in Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Berlin: IEEE). doi: 10.1109/EMBC.2019.8857388
Liu, M., Wang, D., and Huang, H. (2016). Development of an environment-aware locomotion mode recognition system for powered lower limb prostheses. IEEE Trans. Neural Syst. Rehabilitation Eng. 24, 434–443. doi: 10.1109/TNSRE.2015.2420539
Massalin, Y., Abdrakhmanova, M., and Varol, H. A. (2018). User-independent intent recognition for lower limb prostheses using depth sensing. IEEE. Trans. Biomed. Eng. 65, 1759–1770. doi: 10.1109/TBME.2017.2776157
Novo-Torres, L., Ramirez-Paredes, J. P., and Villarreal, D. J. (2019). “Obstacle recognition using computer vision and convolutional neural networks for powered prosthetic leg applications, in Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Berlin: IEEE), 3360–3363. doi: 10.1109/EMBC.2019.8857420
Park, H. W., Wensing, P., and Kim, S. (2015). “Online planning for autonomous running jumps over obstacles in high-speed quadrupeds,” in Robotics: Science and Systems Conference (RSS) (Rome). doi: 10.15607/RSS.2015.XI.047
Rai, V., and Rombokas, E. (2018). “Evaluation of a visual localization system for environment awareness in assistive devices,” in Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Honolulu, HI: IEEE), 5135–5141. doi: 10.1109/EMBC.2018.8513442
Tan, M., and Le, Q. V. (2020). EfficientNet: rethinking model scaling for convolutional neural networks. arXiv [Preprint]. arXiv:1905.11946v115.
Tucker, M. R., Olivier, J., Pagel, A., Bleuler, H., Bouri, M., Lambercy, O., et al. (2015). Control strategies for active lower extremity prosthetics and orthotics: a review. J. Neuroeng. Rehabil. 12:1. doi: 10.1186/1743-0003-12-1
Varol, H. A., and Massalin, Y. (2016). “A feasibility study of depth image based intent recognition for lower limb prostheses,” in Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Orlando, FL: IEEE), 5055–5058. doi: 10.1109/EMBC.2016.7591863
Villarreal, O., Barasuol, V., Wensing, P., and Semini, C. (2020). “MPC-based controller with terrain insight for dynamic legged locomotion,” in IEEE International Conference on Robotics and Automation (ICRA) (Paris: IEEE), arXiv: 1909.13842. doi: 10.1109/ICRA40945.2020.9197312
Wang, D., Du, L., and Huang, H. (2013). “Terrain recognition improves the performance of neural-machine interface for locomotion mode recognition,” in IEEE International Conference on Computing, Networking and Communications (ICNC) (San Diego, CA: IEEE), 87–91. doi: 10.1109/ICCNC.2013.6504059
Young, A. J., and Ferris, D. P. (2017). State of the art and future directions for lower limb robotic exoskeletons. IEEE Trans. Neural Syst. Rehabilitation Eng. 25, 171–182. doi: 10.1109/TNSRE.2016.2521160
Zhang, F., Fang, Z., Liu, M., and Huang, H. (2011). “Preliminary design of a terrain recognition system,” in Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (Boston, MA: IEEE), 5452–5455. doi: 10.1109/IEMBS.2011.6091391
Zhang, K., De Silva, C. W., and Fu, C. (2019a). Sensor fusion for predictive control of human-prosthesis-environment dynamics in assistive walking: a survey. arXiv [Preprint]. arXiv:1903.07674.
Zhang, K., Luo, J., Xiao, W., Zhang, W., Liu, H., Zhu, J., et al. (2020). A subvision system for enhancing the environmental adaptability of the powered transfemoral prosthesis. IEEE Trans. Cybern. doi: 10.1109/TCYB.2020.2978216
Zhang, K., Wang, J., and Fu, C. (2019d). Directional PointNet: 3D Environmental Classification for Wearable Robotics. arXiv [Preprint]. arXiv: 1903.06846.
Zhang, K., Xiong, C., Zhang, W., Liu, H., Lai, D., Rong, Y., et al. (2019c). Environmental features recognition for lower limb prostheses toward predictive walking. IEEE Trans. Neural Syst. Rehabilitation Eng. 27, 465–476. doi: 10.1109/TNSRE.2019.2895221
Zhang, K., Zhang, W., Xiao, W., Liu, H., De Silva, C. W., and Fu, C. (2019b). Sequential decision fusion for environmental classification in assistive walking. IEEE Trans. Neural Syst. Rehabilitation Eng. 27, 1780–1790. doi: 10.1109/TNSRE.2019.2935765
Keywords: artificial intelligence, environment recognition, exoskeletons, rehabilitation robotics, prosthetics, biomechatronics, computer vision, wearable technology
Citation: Laschowski B, McNally W, Wong A and McPhee J (2020) ExoNet Database: Wearable Camera Images of Human Locomotion Environments. Front. Robot. AI 7:562061. doi: 10.3389/frobt.2020.562061
Received: 14 May 2020; Accepted: 06 November 2020;
Published: 03 December 2020.
Edited by:
Carlos Rodriguez-Guerrero, Vrije University Brussel, BelgiumReviewed by:
Luigi Manfredi, University of Dundee School of Medicine, United KingdomCopyright © 2020 Laschowski, McNally, Wong and McPhee. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Brock Laschowski, Ymxhc2Nob3dAdXdhdGVybG9vLmNh
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.