 Rinat B. Rosenberg-Kima
Rinat B. Rosenberg-Kima Yaacov Koren
Yaacov Koren Goren Gordon
Goren Gordon
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Robot. AI , 10 January 2020
Sec. Human-Robot Interaction
Volume 6 - 2019 | https://doi.org/10.3389/frobt.2019.00148
This article is part of the Research Topic Robot-Assisted Learning and Education View all 12 articles
Acknowledging the benefits of active learning and the importance of collaboration skills, the higher education system has started to transform toward utilization of group activities into lecture hall culture. In this study, a novel interaction has been introduced, wherein a social robot facilitated a small collaborative group activity of students in higher education. Thirty-six students completed a 3 h activity that covered the main content of a course in Human Computer Interaction. In this within-subject study, the students worked in groups of four on three activities, moving between three conditions: instructor facilitation of several groups using pen and paper for the activity; tablets facilitation, also used for the activity; and robot facilitation, using tablets for the activity. The robot facilitated the activity by introducing the different tasks, ensuring proper time management, and encouraging discussion among the students. This study examined the effects of facilitation type on attitudes toward the activity facilitation, the group activity, and the robot, using quantitative, and qualitative measures. Overall students perceived the robot positively, as friendly and responsive, even though the robot did not directly respond to the students' verbal communications. While most survey items did not convey significant differences between the robot, tablet, or instructor, we found significant correlations between perceptions of the robot, and attitudes toward the activity facilitation, and the group activity. Qualitative data revealed the drawbacks and benefits of the robot, as well as its relative perceived advantages over a human facilitator, such as better time management, objectivity, and efficiency. These results suggest that the robot's complementary characteristics enable a higher quality learning environment, that corresponds with students' requirements and that a Robot Supportive Collaborative Learning (RSCL) is a promising novel paradigm for higher education.
Classrooms in the twenty-first century are slowly being transformed from frontal lectures halls filled with passive students, to collaborative small groups actively participating in project based learning (Helle et al., 2006; Kokotsaki et al., 2016). Studies have shown that such active participatory learning is more effective in content retention (Al-Balushi and Al-Aamri, 2014) and engagement (Fernandes et al., 2014). Thus, emphasis has been diverted to so-called twenty-first century skills (Crane, 2003; Saavedra and Opfer, 2012; Trilling and Fadel, 2012), with focus on the 4C super-skills, i.e., communication, collaboration, creativity, and critical thinking (Shulman, 1986; Kivunja, 2015). This focus has created several new pedagogies, such as to provide students with the opportunity, within the classroom, to observe, imitate, and practice critical agency, and reflect upon it (ten Dam and Volman, 2004); collaborate by learning to share tasks and resources and be responsible for their tasks (Lai et al., 2017); engage in inter-, trans-, and cross-disciplinary approaches to promote creativity (Harris and de Bruin, 2018); and use project-based learning as the basis for improving communication skills (Saenab et al., 2018).
In higher education, the proliferation of massive online open courses (MOOCs) (Bozkurt et al., 2017) has not lived up to its initial expectation (Khalil and Ebner, 2014; Thomas and Thorpe, 2019). However, the emergence of the “flipped classroom” paradigm (Gilboy et al., 2015; Schmidt and Ralph, 2016), in which students learn the material at home via on-line learning platforms and then discuss and practice it in small groups in the classroom, has been shown to be highly effective (Chen and Chen, 2015; Thomas and Thorpe, 2019).
These paradigms have started to reshape the role of the lecturer in higher education, wherein the role of group facilitator has become an important aspect of teaching in such scenarios (Franco and Nielsen, 2018). Group facilitation involves the mediation of the material via encouragement of communication, active participation, and discussion of all the group members (Phillips and Phillips, 1993). Best practices involve promotion of reflection and action (Franco and Nielsen, 2018) and maintaining engagement density (Matsuyama et al., 2015).
These changes to classic teaching methods have also introduced new challenges as large classrooms, restructured as several small discussion groups, demand the attention of the lecturer, and her TAs (Moust and Schmidt, 1994). While on-line discussion forums have prospered in recent years (Pendry and Salvatore, 2015; Yang et al., 2015; Chiu and Hew, 2018), with AI assisting in managing such forums (Goel and Joyner, 2017), studies have shown that personal face-to-face interactions and discussions in small groups have their advantages (Chen and Chen, 2015; Thomas and Thorpe, 2019). The question of scaling-up group facilitation is thus of prominent importance.
Concurrently, social robots have progressed drastically in the last decade, especially in the field of education (Mubin et al., 2013; Brown and Howard, 2014; Gordon et al., 2015; Belpaeme et al., 2018b). Compared to tablets and screens, social robots have been shown to convey more learning gains (Wainer et al., 2006; Leyzberg et al., 2012; Li, 2015; Luria et al., 2017) and evoke more emotional expressions (Spaulding et al., 2016). They have been used to teach science (Shiomi et al., 2015), math (Brown and Howard, 2014), languages (Kory and Breazeal, 2014; Belpaeme et al., 2015; Hein and Nathan-Roberts, 2018), and even nutrition (Short et al., 2014). Moreover, they have been used to promote meta-cognitive skills such as curiosity (Gordon et al., 2015; Ceha et al., 2019) and growth mindset (Park et al., 2017). Social robots in education have taken different roles. They have been used as peers or companions in learning with the students (Okita et al., 2009), or tutors in which the robot teaches students (Belpaeme et al., 2018b). Moreover, social robots have been used as teachers using frontal lecture mode (Sisman et al., 2018), one-on-one interaction (Short et al., 2014; Gordon et al., 2015) and even in two-person dialogues (Tahir et al., 2014). Several studies have addressed how a single robot can interact with small groups of children (Leite et al., 2015; Strohkorb et al., 2015), elderly (Matsuyama et al., 2008), and adults (Matsuyama et al., 2015). More specifically, several studies examined possible roles of social robots in group interaction (Jung et al., 2015; Shen et al., 2018; Alves-Oliveira et al., 2019; Correia et al., 2019; Oliveira et al., 2019).
These advances in social robots resulted in their slow introduction into the educational system (Belpaeme et al., 2018a; Kory-Westlund and Breazeal, 2019) and into homes (Scassellati et al., 2018). Many studies have focused on young children, from preschoolers (Kory and Breazeal, 2014), through elementary school (Leite et al., 2015), and adolescents (Björling et al., 2019), with special interest in children with Autism (Scassellati et al., 2018). In recent years, several applications of social robots in higher education have started to emerge (Brown and Howard, 2014; Edwards et al., 2016; Deublein et al., 2018). Pfeifer and Lugrin (2018) showed that a female robot can lead to better learning in female students while breaking stereotypical beliefs. Rosenberg-Kima et al. (2019) showed that social robots can serve as teaching assistants by answering simple questions of students working in small groups.
In this contribution we report on a higher education application of social robots as small group facilitators. Our goal was to compare the current state, in which an instructor attempts to facilitate several groups in the classroom, to a robot facilitator that is more limited in terms of emotional and cognitive capabilities yet remains with the group for the entire activity to facilitate it. An undergraduate course group activity that summarizes the material taught during a full semester has been converted into an interaction facilitated by a social robot, Nao, and mediated by tablets. Groups of four students performed the group activity, followed the instructions of the robot facilitator, discussed the material, and then answered questionnaires about the interaction. The same groups performed similar activities with tablets alone and with pen-and-paper, facilitated by the instructor of the course (within-subject design). Their impressions of the different activities' modalities are reported.
Thirty-six students (age M = 28 years, SD = 0.3, 58.3% females) who participated in the course Human Computer Interaction completed a three-parts activity that covered the main content of the course and served as preparation for the final exam. The students consented to include their participation data in the study. The study was approved by the IRB.
All the participants completed three group-linked activities, each covering different content of the course, and serving as training for the final exam. The students worked collaboratively in groups of four students (nine groups in total). The overall goal of the activities was to design a family App that aims to provide all the needed information and tools to support family communication and planning (e.g., weekly schedule, messages, budget planning, etc.), while enabling each member of the family to be an active participant. Each activity lasted about 30 min. The specific goals of each activity are described in Table 1.
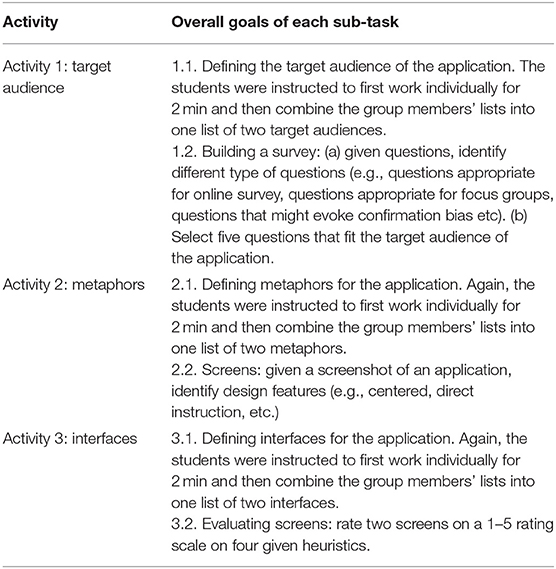
Table 1. Description of the goals of each task in the Human-Computer Interaction course activities, where the overall goal was to develop a family-oriented App.
The study had a within-subject design, wherein the students worked in groups of four, each group going through three conditions (Figure 1):
1. Robot condition: In this condition, each group of students performed the task using tablets and were facilitated by a social robot. Each group was located in a separate room.
2. Tablet condition: In this condition, the groups of students performed the task and were facilitated by tablets, located in a large lecture hall.
3. Instructor condition: In this condition, the groups of students performed the task using pen and paper. All the groups were located in a large lecture hall and were facilitated by a single instructor.
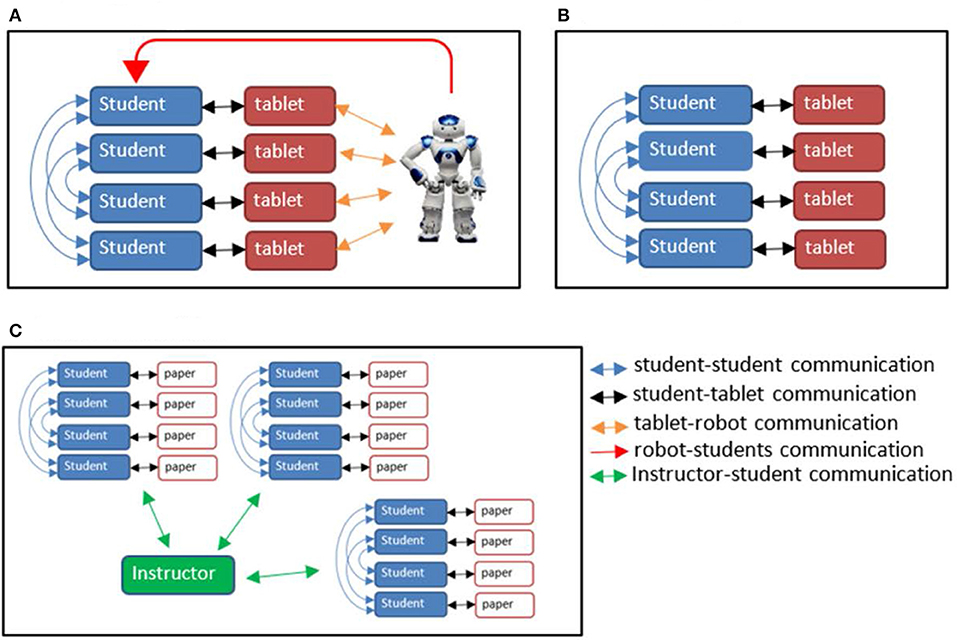
Figure 1. Setup architecture of the three conditions used in the study. (A) Robot condition. (B) Tablet condition. (C) Instructor condition.
The order of the conditions differed between the groups, but the order of the activities with respect to the task itself was the same, as each activity was building on the previous one.
Each of the nine groups completed the three activities and experiences all three conditions. Thus, for example, the first group completed the first activity with a robot-facilitation (robot + tablets), then moved to a different room where it completed the second activity with a tablet-facilitation (tablets only), and lastly moved to a different room where it completed the third activity with paper based instruction, and an instructor-facilitation. The sequence of conditions varied between the groups to control for activity and order effect (see Table 2 for a complete sequence of all the groups).
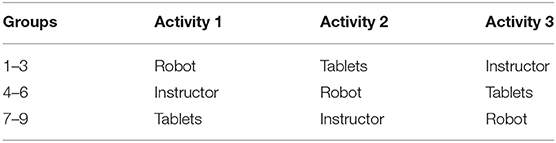
Table 2. Sequence of activity and conditions for each group.
The setup architecture of the social-robot facilitator (robotator) condition included communication between four students, four android tablets (one per student), and a NAO robot (see Figure 1A). Unfortunately, state-of-the-art Natural Language Processing (NLP) could not support verbal communication facilitation of a group at this level. Hence, the robot spoke to the students utilizing pre-recorded sentences, but in order to establish bidirectional communication, the tablets served as additional sources of input and output between the robot and students. To implement this architecture, we used Python and Kivy to develop the tablet application, and ROS (Robot Operating Systems) and Python to control and manage the communication between the Robot and the tablets. The robotator facilitated this interaction by introducing the different tasks, managing the time (e.g., the robot said in relation to the design App task: “take 2 min to list different target audiences for the App, and then create a combined list with two target audiences,” after which a timer of 2 min started followed by the next set of instructions), and encouraging discussion between the students (e.g., if two students answered the same question differently, the robot would say “I see that your answers are different, would you like to discuss that?”).
The setup architecture of the tablets-only condition included communication between four students, each with one tablet (see Figure 1B). Python and Kivy were used to develop the tablet application, that included presentation of the tasks, guidelines, and time management via a presented timer.
The setup for the instructor condition included exchange of ideas between four students who worked with paper-based instructions that included the exact same instructions as in the tablet and robot-tablet conditions, but did not include support such as a timer. A human instructor was present in the classroom to answer questions of all the groups in this condition.
After each activity, students completed a 13-items questionnaire to evaluate their attitudes toward the robot\tablet\instructor depending on the condition. Students responded to a series of statements on a 5-point Likert-type scale (from 1 = Strongly disagree to 5 = Strongly agree) (e.g., “I trusted the information given by the robot\tablet\instructor”; see Table 3 for the complete list). The questionnaire items were combined to form the attitudes toward the facilitation scale (Cronbach's alpha = 0.881).
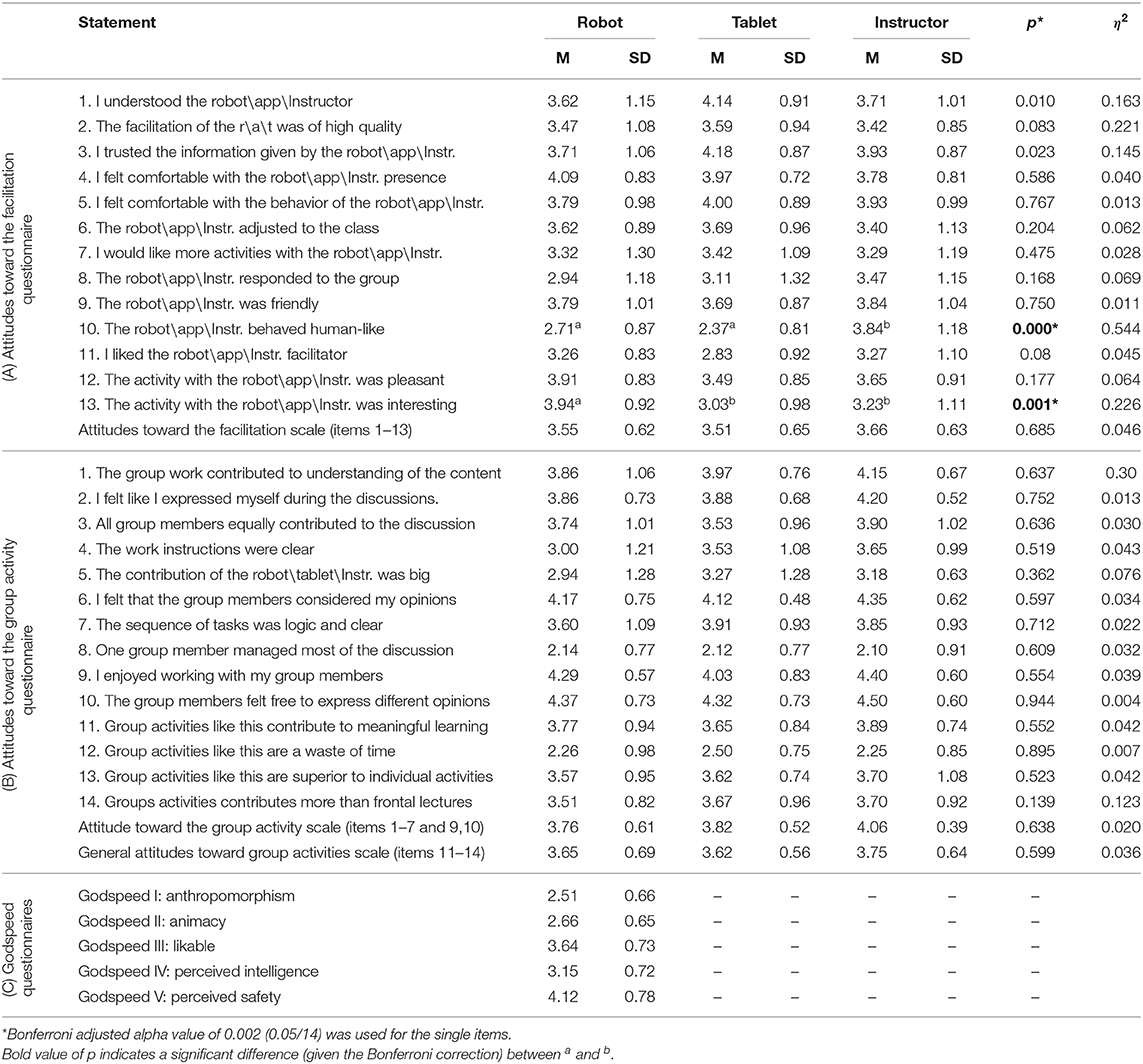
Table 3. Results for attitudes toward the activity facilitation questionnaire (A), attitudes toward the group activity questionnaire (B), and Godspeed questionnaires (C).
After each activity, students completed a 14-items questionnaire to evaluate their attitudes toward the group. Students responded to a series of statements on a 5-point Likert-type scale (from 1 = Strongly disagree to 5 = Strongly agree). The questionnaire resulted in two subscales: attitudes toward the specific group activity scale (e.g., “The group work contributed to understanding the content”; see Table 3 for the complete list), which included items 1–10 excluding item 8 (Cronbach's alpha = 0.816), and attitudes toward group activities scale (e.g., “Group activities like this, are superior to individual activities”), which included items 11–14 (Cronbach's alpha = 0.743).
After the robot-facilitated activity, the students completed the 24-items Godspeed questionnaire, in which students responded to pairs of words and rated the robot on a 5-point semantic differential scale (e.g., Unfriendly-Friendly, Ignorant-Knowledgeable), resulting in 5 subscales: (I) Anthropomorphism consisting of 5 items (in this study Cronbach's alpha = 0.686), (II) Animacy consisting of six items (in this study Cronbach's alpha = 0.728), (III) Likable consisting of five items (in this study Cronbach's alpha = 0.867), (IV) Perceived Intelligence consisting of five items (in this study Cronbach's alpha = 0.845), and (V) Perceived Emotional safety (e.g., anxious vs. relaxed) consisting of three items (in this study Cronbach's alpha = 0.786) (Bartneck et al., 2009).
A semi open-ended questionnaire was used to collect qualitative data. The participants were asked to specify, in writing, three advantages, and three disadvantages the robot had as a facilitator of student groups. The open-ended questionnaire served as a means to get the perspective of students in their own words to provide “depth, detail, and meaning at a very personal level of experience” (Patton, 2014, p. 24). Nevertheless, given the limitations of an open-ended questionnaire in writing (e.g., dependent on writing skills of respondents or the impossibility of extending responses), observational data, based on video recording of activity, and a video sample analysis was used as a supportive tool to capture the context (Bauer and Gaskell, 2000).
After signing a consent form, the students were placed in groups of four students. The groups were then guided to the location of their first activity settings according to their conditions as described in Table 2. Thus, groups 1–3 were guided to three different rooms in which the robots and tablets setting was located, groups 4–6 were placed in groups in one big room, where each student received a tablet, and groups 7–9 were placed in groups in one big room, where each student received paper-based instructions and a human instructor was present to answer questions. After completing the first activity, which took about 30 min, the students completed the questionnaires for about 15 min and were then guided to the location of the second activity according to the conditions, completed the second activity, filled again the questionnaires and were guided in the same way to the third activity. Overall completing the three activities, filling the questionnaires after each activity, and changing locations took 3 h (see Figure 2 for footage of the robot condition).

Figure 2. Footage from the study of the robot condition settings.
This study examined the effects of facilitation type (robot facilitation, tablet facilitation, and instructor facilitation) on attitudes toward the activity and attitudes toward the group activity using one-way within-subject ANCOVA with group order as a covariant to control for order and activity (in groups 1–3 the robot facilitated the first activity, in groups 4–6 the robot facilitated the second activity, and in groups 7–9 the robot facilitated the third activity). Overall, we did not find an effect for the group order. In addition, attitudes toward the robot were measured using the Godspeed questionnaires and were correlated to the attitudes toward the robot facilitation and the attitudes toward the robot group activity.
Preliminary data analysis included examination of missing data and outliers, verification of the equivalence of treatment groups, and tests for assumptions of the parametric statistics. Some of the students missed some of the items in which case they were omitted from the analysis in the relevant places. Shapiro–Wilk normality test was used to detect violation of the normal distribution assumption. Results indicated that several dependent measures were not normally distributed. Nevertheless, it was suggested that ANOVA is robust enough to moderate violations of this assumption (Blanca et al., 2017). The overall scales were normally distributed. In addition, Bonferroni correction was applied to adjust the alpha values: Bonferroni adjusted alpha value of 0.002 (0.05/14) was used for the single items.
Overall the students reported that the activity with the robot was pleasant and interesting and the overall mean for the attitudes toward the robot facilitation scale was 3.55 (±0.62) (see Table 3A and Figure 3). Results of the within-subject ANCOVA for item 10 (“the robot\tablet\instructor behaved human-like”) indicated a significant within-subject effect [F(2,52) = 30.982, p < 0.001]. Post-hoc Bonferroni tests revealed a significant difference between the instructor and the robot conditions (p < 0.001) and between the instructor and the tablet condition (p < 0.001). As expected, the participants rated the instructor as significantly more human-like than the robot and the tablet. There was no significant difference between the robot and the tablet condition. In addition, results of the ANCOVA for item 13 (“the activity with the robot\tablet\instructor was interesting”) indicated a significant within-subject effect [F(2,52) = 7.576, p = 0.001]. Post-hoc Bonferroni tests revealed a significant difference between the robot and the tablet conditions (p = 0.004) and between the robot and the instructor condition (p = 0.023). The participants rated the activity with the robot as significantly more interesting than the tablet and the instructor conditions. There was no significant difference between the instructor and the tablet condition. Nevertheless, for the rest of the items there was no significance difference between the robot, the tablet, and the human instructor.
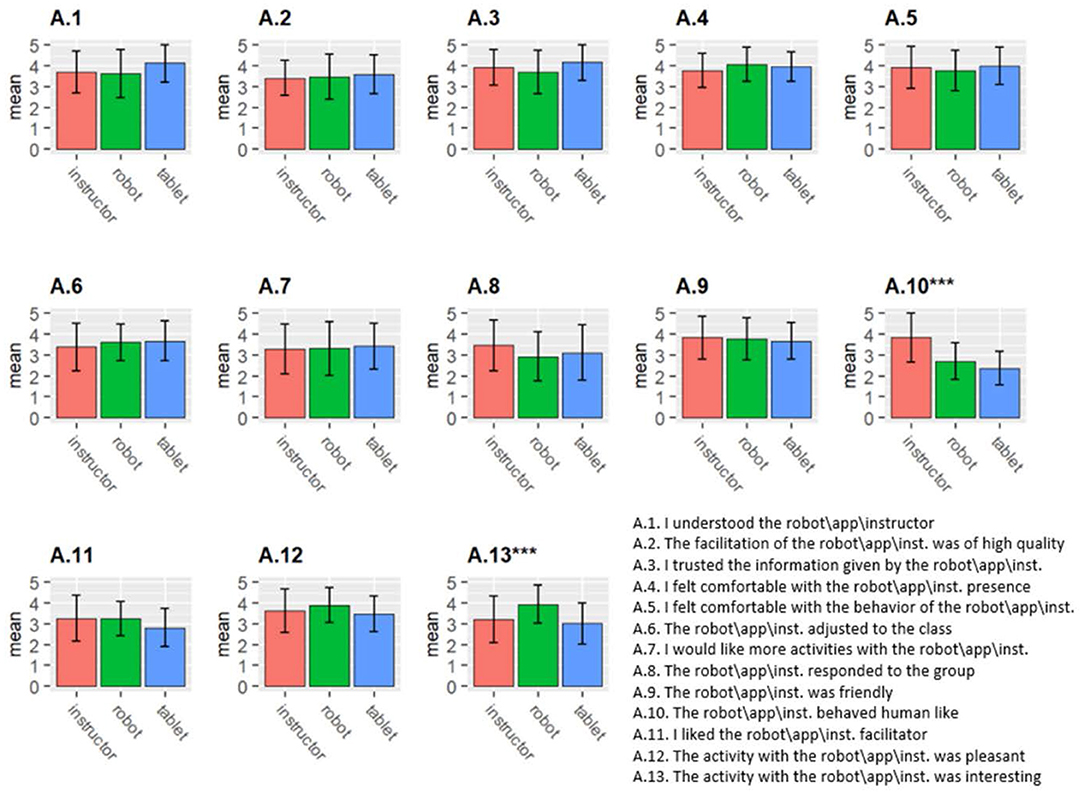
Figure 3. Attitudes toward the facilitation (see Table 3 for the complete list of statements). ***p < 0.001.
Overall students rated the group activity positively (see Table 3B). Results of the within-subject ANCOVA yielded no significance effects. Attitudes toward the robot facilitator had an overall mean of 3.76 (±0.61) for the attitudes toward the current group activity scale and an overall mean of 3.65 (±0.69) for the attitudes toward general group activities scale.
Godspeed questionnaire, consisting of five subscales, was used to measure the participants' attitudes toward the robot used in the study. On a 1–5 scale, overall the participants rated the robot 2.51 (±0.66) on anthropomorphism, 2.66 (±0.65) on animacy, 3.64 (±0.73) on likable, 3.15 (±0.72) on perceived intelligence, and 4.12 (±0.78) on perceived safety (see Table 3C). We were interested in finding what were the correlations between the Godspeed subscales and the three attitudes scales (attitudes toward the facilitation scale, the group activity scale, and group activities scale). With regard to the attitudes toward the facilitation scale, Pearson correlation tests indicated strong correlations between the scale and Anthropomorphism (r = 0.632, p < 0.01), Animacy (r = 0.559, p < 0.01), Likable (r = 0.634, p < 0.01), and Perceived Intelligence (r = 0.595, p < 0.01), but not with Perceived Safety (r = −0.080, p = 0.655). With regard to the attitudes toward the current group activity scale, only Perceived Intelligence of the robot was significantly correlated to the scale (r = 0.429, p < 0.05). With regard to attitudes toward general groups activities scale, none of Godspeed subscales was correlated to this scale (See Figure 4).
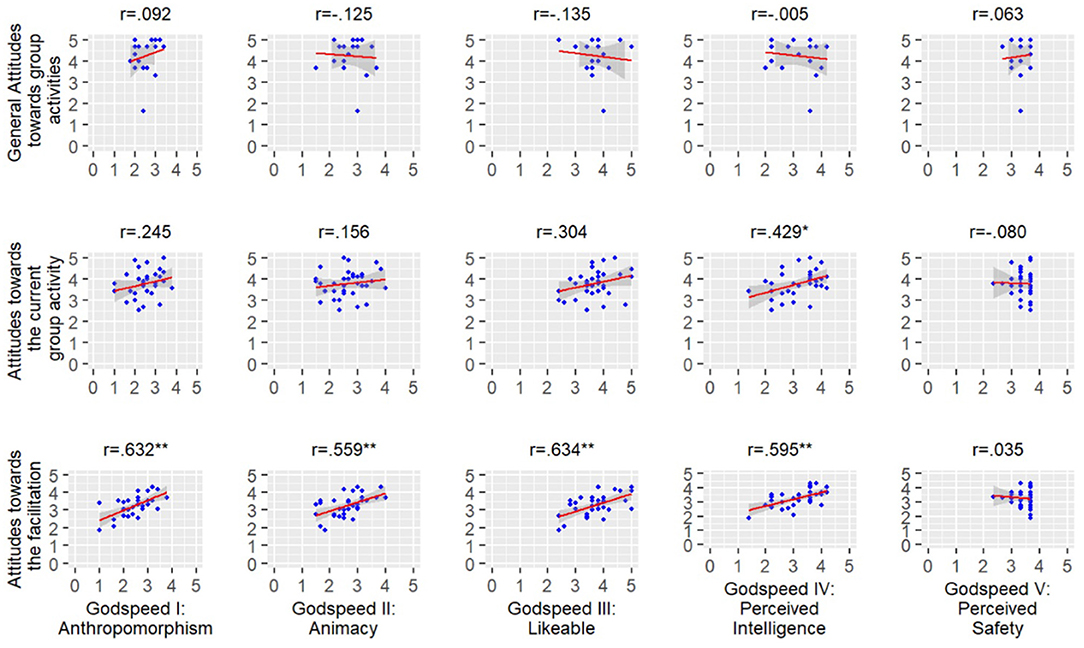
Figure 4. Pearson correlations between Godspeed questionnaires and the attitudes scales. **p < 0.01, *p < 0.05.
Thematic analysis method (Boyatzis, 1998) was used for analyzing and reporting themes within the data. The method is applicable to the research objective to report the ways individuals make meaning of their experience, on the one hand, and is not wedded to any pre-existing theoretical framework, on the other (Braun and Clarke, 2006). Following the template approach (Crabtree and Miller, 1998), and based on a preliminary scanning of the data, 157 students' statements were classified by two research team members to four principle categories: (1) Technical Functionality Benefits. (2) Social and Psychological Benefits. (3) Technical Functionality Drawbacks. (4) Social and Psychological Drawbacks. Within each category, statements were re-reviewed, collating statements into relevant themes. The analysis according to the aforementioned coding resulted in a total of 48% statements expressing benefits the robot had as a facilitator of student groups vs. 52% statements expressing drawbacks. Results analysis to the semi-open question indicated that students were well-attentive to the interaction with the robot (supported by video recording analysis), to its benefits as well as to the drawbacks of using a robot as a group facilitator. Excluding apparent novelty effect statements revealed that they were more concerned with technical functionalities issues, but also attentive to social, and psychological aspects.
Themes that emerged in the category technical functionality benefits include efficiency (e.g., “saves manpower,” “time efficient,” “put the activity to order”)1, focus (e.g., “its mind is not distracted,” “focused on the tasks,” “concentrated only in issues relevant to the task”), accurate (e.g., “accurate instructions,” “don't forget anything”), and responsive (e.g., “responsive to topics addressed by the students via tablets”). Themes that emerged in the category technical functionality drawbacks include limited communication skills (e.g., “its voice was not clear enough,” “did not respond to oral questions,” “one-shot answer, cannot repeat it”), limited pedagogical skills (e.g., “you cannot ask it follow-on questions,” “instructions were not always clear”), and technical problems (“there were some bugs,” “its voice was not load enough,” “slow boot”).
Themes that emerged in the category psychological drawbacks include being inhuman (e.g., “not human,” “mechanic,” “frigid”), awkward (e.g., “strange eye contact,” “caused strange feelings,” “strange head movements”), limited communication skills (“did not interact enough with the group,” “did not adjust itself to the group,” “behaved in a not socially acceptable manner”), and impersonal (“no personal relationship”). Interestingly, for many students the fact that the robot was not human was an advantage. Thus, themes that emerged in the category social and psychological benefits include objective, not judgmental (e.g., “the robot have no personal bias against one of the students,” “the robot does not have a favorite student”), friendly (e.g., “the robot was cute and friendly”), pleasant (e.g., “the robot was polite,” “the robot was nice”). The themes break routine and innovative also emerged but were removed as they were related to the novelty effect.
In addition, analysis of the video recordings revealed that the robot served as a focal point and was very effective in facilitating the activity in terms of time management and group interaction. For example, when the robot gave the students 2 min for individual thinking, the students worked individually, and when it asked to regroup the students immediately regrouped and started to work together. In the tablet and instructor conditions, there was less of a clear distinction between individual and group activity. Thus, for example, when the students read the instruction to work individually for 2 min, in many cases they did not do that but rather worked in a group or pairs.
A novel interaction has been introduced, wherein a robot facilitated a small group activity of students in higher education. While we have not explicitly implemented a “flipped-classroom” paradigm (Gilboy et al., 2015; Thomas and Thorpe, 2019), since the students learned the material in a frontal lecture mode, we have applied principles of group facilitation to robot-directed interaction (Chen and Chen, 2015).
The post-interaction questionnaire and its quantitative analysis revealed interesting insights into the interaction. Most items did not reveal significant differences between instructor and robot. The only highly significant differences were the expected questions of perception of the robot/tablet/ instructor as human-like, and the perception of the activity as interesting. In the human-like perception question, students rated the instructor as obviously more human-like, but the difference between tablet and robot, while not small, was not significant. This may represent the perception of the students that the robot was “a machine,” much like a tablet, and not strictly “a social agent,” like a human (Kahn et al., 2011). The perception of the activity as “interesting” was rated significantly higher for the robot condition, but this may be due to the novelty effect: this was the first interaction of the students with a social robot.
Moreover, even though the robot did not directly respond to the students' verbal communications, they still perceived it as friendly and responsive. However, these results should be taken in view of the similar ratings the tablet-condition received. It is unsure how students interpreted “the app was friendly,” whereas “the robot was friendly” had a much more direct social interpretation.
The Godspeed questionnaire produced several important insights. The student's perception of the robots correlated with how they perceived the activities. However, the strongest correlations were between the perceived intelligence, anthropomorphism, animacy, likeability, and the facilitation itself. Hence, students who perceived the robot as more animate and likable, rated the facilitation higher. This conforms to previous studies with human facilitators that stressed the importance of the social presence of the facilitator on the activity (Franco and Nielsen, 2018). The rating of the current group activity was only correlated to the perceived intelligence of the robot, emphasizing the difference between activity, which relates to intelligence, and facilitation of the group, which relates also to animacy and likeability. In contrast, the perception of the robot was uncorrelated to the students' attitudes toward group activities in general. The robot's safety, while rated very high, did not correlate to any other scale. This may be due to the physical distance of the robot from the students, its more childlike appearance or lack of possibly threatening actions.
The qualitative analysis of the students' answers gave insights into the benefits of the current setup and raised issues that can be addressed in future applications. First, there were many benefits to the setup, e.g., time management which is an important concern in effective group activities (Gresalfi et al., 2012), accuracy and focus, which can add another layer of efficiency to repeated activities. Second, the fact that the robot was non-judgmental, as opposed to a human facilitator, raises the interesting topic of the benefits of social robots over humans in roles that involve possible judgments (Kidd and Breazeal, 2007). These results also support the media-equation according to which people relate to computers and other technologies, and in this case to robots, in the same way they relate to other human beings (Reeves and Nass, 1996).
However, many drawbacks shed light on possible improvements for future applications. The most obvious ones are technical, e.g., improved quality assurance tests on a larger scale setup are required. The biggest drawback that the students' commented on was the lack of communication skills and responsiveness. Due to technological challenges of natural language processing in a group scenario, especially in the students' native language, these lacks in the setup will not be overcome easily in the near future. However, improved perceptions, such as speaker recognition and engagement via facial expressions (Bhattacharya et al., 2018) can be implemented in such a setup and supply better social and emotional management for the group activity (Matsuyama et al., 2015). Overall, the students commented on the potential of this setup in terms of saving manpower and scalability, non-judgmental and objective facilitation, and increased focus and efficiency of activity management.
Considering the relative acceptance of the students of a robot facilitator puts the role of the future instructor in a new light (Franco and Nielsen, 2018). In our envisioned future “robot facilitated flipped classroom” paradigm, the group facilitation will be conducted by social robots. However, due to formidable technological challenges, the robot cannot understand the discussion's verbal content, nor deal with delicate emotional and social scenarios. Hence, the role of the robot could include for example time management and role assignment whereas the role of future instructors may focus more on answering complex questions, managing divergence from proper discussion content and dealing with emotional and social aspects of the task.
Several limitations in this study should be noted. First, the interaction with a social robot facilitator was novel for all the students and a novelty effect was evident especially with respect to some benefits noted by the students. In order to get a deeper understanding of the long-lasting potential of a social robot facilitator longer interventions (e.g., lasting over a semester) should be examined. In addition, this study was holistic. We were interested in comparing the current state of an instructor facilitating several groups in parallel to the scenario where several robots assist the instructor in facilitating the groups. Nevertheless, this holistic comparison comes with a price tag of control. Thus, there were several differences between the conditions: students in the paper-based condition sat in a lecture hall with all the other groups, whereas in the robot condition they were alone with the robot in a separate room. This makes it more difficult to claim that the effect was of a robot vs. human, or the fact that it was a private facilitator (the robot) vs. a shared facilitator (the instructor). Yet another limitation was the lack of pre-post exams of the content that was due to the fact the HCI content involves skills that are hard to measure. Future studies should conduct a research in a content area that is easier to assess for learning.
We have introduced a novel educational paradigm in which a social robot facilitated a small group activity in higher educational settings. We have conducted a first study that compared the robot-facilitated setup to human facilitation and activities with tablets only. We have shown that while human facilitation is still considered better in most aspects, students could tap into the benefits of a robot facilitator, such as better time management, objectivity, and efficiency. Nevertheless, in terms of the quantitative data we did not find significant differences that cannot be attributed to a novelty effect (e.g., the robot was significantly more interesting).
Future work will include upgrading the setup to include augmented perception via a larger sensor suite composed of directional microphones and cameras. This will enable real-time speaker recognition and engagement detection to facilitate also the social and emotional sides of the group activity. Furthermore, applying the setup in primary and secondary educational settings raises new challenges, and new opportunities.
Furthermore, while the current study did not asses the students' communication and collaboration skills, future studies will examine the possible positive influence of repeated robot facilitation, using state-of-the-art pedagogy, such as time-management, and maintaining engagement density (Matsuyama et al., 2015), on students' 4C's super skills (Shulman, 1986; Kivunja, 2015).
To conclude, this contribution offers a new and exciting venue for using social robots for robot supported collaborative learning (RSCL) in education, as efficient, objective, and social facilitators for small group discussions.
The datasets generated for this study are available on request to the corresponding author.
The studies involving human participants were reviewed and approved by Tel Aviv University Internal Review Board. The patients/participants provided their written informed consent to participate in this study.
RR-K contributed to the code of the setup, ran the study, and contributed to the data analyzes and writing of the paper. YK assisted in the execution of the research and the analysis of the qualitative findings. GG contributed to the code of the setup, helped in running the study, and contributed to the writing of the paper.
This research was funded by the Minducate Innovation Center of the Sagol School of Neuroscience to RR-K and by the generosity of Eric and Wendy Schmidt by recommendation of the Schmidt Futures program.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
1. ^Translated from Hebrew by team members.
Al-Balushi, S. M., and Al-Aamri, S. S. (2014). The effect of environmental science projects on students' environmental knowledge and science attitudes. Int. Res. Geogr. Environ. Educ. 23, 213–227. doi: 10.1080/10382046.2014.927167
Alves-Oliveira, P., Melo, F. S., Castellano, G., and Paiva, A. (2019). Empathic robot for group learning: a field study. ACM Trans. Hum. Robot Interact. 8:3. doi: 10.1145/3300188
Bartneck, C., Kulić, D., Croft, E., and Zoghbi, S. (2009). Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int. J. Soc. Robot. 1, 71–81. doi: 10.1007/s12369-008-0001-3
Bauer, M. W., and Gaskell, G. (2000). Qualitative Researching With Text, Image and Sound: A Practical Handbook for Social Research. London, UK: Sage. doi: 10.4135/9781849209731
Belpaeme, T., Kennedy, J., Baxter, P., Vogt, P., Krahmer, E. E., Kopp, S., et al. (2015). “L2TOR-second language tutoring using social robots,” in Proceedings of the ICSR 2015 WONDER Workshop (Paris).
Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., and Tanaka, F. (2018a). Social robots for education: a review. Sci. Robot. 3:eaat5954. doi: 10.1126/scirobotics.aat5954
Belpaeme, T., Vogt, P., Van den Berghe, R., Bergmann, K., Göksun, T., De Haas, M., et al. (2018b). Guidelines for designing social robots as second language tutors. Int. J. Soc. Robot. 10, 325–341. doi: 10.1007/s12369-018-0467-6
Bhattacharya, I., Foley, M., Zhang, N., Zhang, T., Ku, C., Mine, C., et al. (2018). “A multimodal-sensor-enabled room for unobtrusive group meeting analysis,” in Proceedings of the 20th ACM International Conference on Multimodal Interaction (New York, NY), 347–355. doi: 10.1145/3242969.3243022
Björling, E. A., Rose, E., Davidson, A., Ren, R., and Wong, D. (2019). Can we keep him forever? teens' engagement and desire for emotional connection with a social robot. Int. J. Soc. Robot. doi: 10.1007/s12369-019-00539-6. [Epub ahead of print].
Blanca, M., Alarcon, R., Arnau, J., Bono, R., and Bendayan, R. (2017). Non-normal data: is ANOVA still a valid option? Psicothema 29, 552–557. doi: 10.7334/psicothema2016.383
Boyatzis, R. E. (1998). Transforming Qualitative Information: Thematic Analysis and Code Development. Sage.
Bozkurt, A., Akgün-Özbek, E., and Zawacki-Richter, O. (2017). Trends and patterns in massive open online courses: review and content analysis of research on MOOCs (2008–2015). Int. Rev. Res. Open Distr. Learn. 18, 118–147. doi: 10.19173/irrodl.v18i5.3080
Braun, V., and Clarke, V. (2006). Using thematic analysis in psychology. Qual. Res. Psychol. 3, 77–101. doi: 10.1191/1478088706qp063oa
Brown, L. N., and Howard, A. M. (2014). “The positive effects of verbal encouragement in mathematics education using a social robot,” in 2014 IEEE Integrated STEM Education Conference (ISEC) (Princeton, NJ), 1–5. doi: 10.1109/ISECon.2014.6891009
Ceha, J., Chhibber, N., Goh, J., McDonald, C., Oudeyer, P.-Y., Kulić, D., et al. (2019). “Expression of curiosity in social robots: design, perception, and effects on behaviour,” in Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems (Glasgow, UK), 1–406. doi: 10.1145/3290605.3300636
Chen, Y.-H., and Chen, P.-J. (2015). MOOC study group: facilitation strategies, influential factors, and student perceived gains. Comput. Educ. 86, 55–70. doi: 10.1016/j.compedu.2015.03.008
Chiu, T. K. F., and Hew, T. K. F. (2018). Factors influencing peer learning and performance in MOOC asynchronous online discussion forum. Australas. J. Educ. Technol. 34, 16–28. doi: 10.14742/ajet.3240
Correia, F., Melo, F. S., and Paiva, A. (2019). “Group intelligence on social robots,” in 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI) (Daegu), 703–705. doi: 10.1109/HRI.2019.8673089
Crabtree, B., and Miller, W. (1998). “A template approach to text anyalysis: developing and using codebooks,” in Doing Qualitative Research in Primary Care: Multiple Strategies, eds B. F. Crabtree and W. L. Miller (Newbury Park, CA: Sage Publications), 93–109.
Crane, T. (2003). Learning for the 21st Century: A Report and Mile Guide for 21st Century Skills. Partnership for 21st Century Skills.
Deublein, A., Pfeifer, A., Merbach, K., Bruckner, K., Mengelkamp, C., and Lugrin, B. (2018). Scaffolding of motivation in learning using a social robot. Comp. Educ. 125, 182–190. doi: 10.1016/j.compedu.2018.06.015
Edwards, A., Edwards, C., Spence, P. R., Harris, C., and Gambino, A. (2016). Robots in the classroom: differences in students' perceptions of credibility and learning between “teacher as robot” and “robot as teacher.” Comp. Hum. Behav. 65, 627–634. doi: 10.1016/j.chb.2016.06.005
Fernandes, S., Mesquita, D., Flores, M. A., and Lima, R. M. (2014). Engaging students in learning: findings from a study of project-led education. Eur. J. Eng. Educ. 39, 55–67. doi: 10.1080/03043797.2013.833170
Franco, L. A., and Nielsen, M. F. (2018). Examining group facilitation in situ: the use of formulations in facilitation practice. Group Decis. Negot. 27, 735–756. doi: 10.1007/s10726-018-9577-7
Gilboy, M. B., Heinerichs, S., and Pazzaglia, G. (2015). Enhancing student engagement using the flipped classroom. J. Nutr. Educ. Behav. 47, 109–114. doi: 10.1016/j.jneb.2014.08.008
Goel, A. K., and Joyner, D. A. (2017). Using AI to teach AI: lessons from an online AI class. AI Magazine 38, 48–59. doi: 10.1609/aimag.v38i2.2732
Gordon, G., Breazeal, C., and Engel, S. (2015). “Can children catch curiosity from a social robot?,” in Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (New York, NY), 91–98. doi: 10.1145/2696454.2696469
Gresalfi, M. S., Barnes, J., and Cross, D. (2012). When does an opportunity become an opportunity? Unpacking classroom practice through the lens of ecological psychology. Educ. Stud. Math. 80, 249–267. doi: 10.1007/s/10649-011-9367-5
Harris, A., and de Bruin, L. R. (2018). Secondary school creativity, teacher practice and STEAM education: an international study. J. Educ. Change 19, 153–179. doi: 10.1007/s10833-017-9311-2
Hein, M., and Nathan-Roberts, D. (2018). “Socially interactive robots can teach young students language skills; a systematic review,” in Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Philadelphia, PA), 1083–1087. doi: 10.1177/1541931218621249
Helle, L., Tynjälä, P., and Olkinuora, E. (2006). Project-based learning in post-secondary education—theory, practice and rubber sling shots. High. Educ. 51, 287–314. doi: 10.1007/s10734-004-6386-5
Jung, M. F., Martelaro, N., and Hinds, P. J. (2015). “Using robots to moderate team conflict: the case of repairing violations,” in Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (New York, NY), 229–236. doi: 10.1145/2696454.2696460
Kahn, P. H., Reichert, A. L., Gary, H. E., Kanda, T., Ishiguro, H., Shen, S., et al. (2011). “The new ontological category hypothesis in human-robot interaction,” in 2011 6th ACM/IEEE International Conference on Human-Robot Interaction (HRI) (Lausanne), 159–160. doi: 10.1145/1957656.1957710
Khalil, H., and Ebner, M. (2014). MOOCs Completion Rates and Possible Methods to Improve Retention—A Literature Review, 1305–1313. Retrieved from: https://www.learntechlib.org/primary/p/147656/
Kidd, C. D., and Breazeal, C. (2007). “A robotic weight loss coach,” in Proceedings of the National Conference on Artificial Intelligence, 22 (Menlo Park, CA; Cambridge, MA; London; AAAI Press; MIT Press).
Kivunja, C. (2015). Exploring the pedagogical meaning and implications of the 4Cs “super skills” for the 21st century through Bruner's 5E lenses of knowledge construction to improve pedagogies of the new learning paradigm. Creat. Educ. 6:224. doi: 10.4236/ce.2015.62021
Kokotsaki, D., Menzies, V., and Wiggins, A. (2016). Project-based learning: a review of the literature. Improv. Schools 19, 267–277. doi: 10.1177/1365480216659733
Kory, J., and Breazeal, C. (2014). “Storytelling with robots: learning companions for preschool children's language development,” in The 23rd IEEE International Symposium on Robot and Human Interactive Communication (Edinburgh), 643–648. doi: 10.1109/ROMAN.2014.6926325
Kory-Westlund, J. M., and Breazeal, C. (2019). A long-term study of young children's rapport, social emulation, and language learning with a peer-like robot playmate in preschool. Front. Robot. AI 6:81. doi: 10.3389/frobt.2019.00081
Lai, E., DiCerbo, K., and Foltz, P. (2017). Skills for Today: What We Know about Teaching and Assessing Collaboration. Pearson.
Leite, I., McCoy, M., Lohani, M., Ullman, D., Salomons, N., Stokes, C., et al. (2015). “Emotional storytelling in the classroom: individual versus group interaction between children and robots,” in Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction (Portland, OR), 75–82. doi: 10.1145/2696454.2696481
Leyzberg, D., Spaulding, S., Toneva, M., and Scassellati, B. (2012). “The physical presence of a robot tutor increases cognitive learning gains,” in Proceedings of the Cognitive Science Society, 34. Retrieved from: http://escholarship.org/uc/item/7ck0p200
Li, J. (2015). The benefit of being physically present: a survey of experimental works comparing copresent robots, telepresent robots and virtual agents. Int. J. Hum. Comput. Stud. 77, 23–37. doi: 10.1016/j.ijhcs.2015.01.001
Luria, M., Hoffman, G., and Zuckerman, O. (2017). “Comparing social robot, screen and voice interfaces for smart-home control,” in Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems—CHI'17 (New York, NY), 580–628. doi: 10.1145/3025453.3025786
Matsuyama, Y., Akiba, I., Fujie, S., and Kobayashi, T. (2015). Four-participant group conversation: a facilitation robot controlling engagement density as the fourth participant. Comput. Speech Lang. 33, 1–24. doi: 10.1016/j.csl.2014.12.001
Matsuyama, Y., Taniyama, H., Fujie, S., and Kobayashi, T. (2008). “Designing communication activation system in group communication,” Humanoids 2008 - 8th IEEE-RAS International Conference on Humanoid Robots (Daejeon), 629–634. doi: 10.1109/ICHR.2008.4756016
Moust, J. H. C., and Schmidt, H. G. (1994). Facilitating small-group learning: a comparison of student and staff tutors' behavior. Instruct. Sci. 22, 287–301. doi: 10.1007/BF00891782
Mubin, O., Stevens, C. J., Shahid, S., Al Mahmud, A., and Dong, J.-J. (2013). A review of the applicability of robots in education. J. Technol. Educ. Learn. 1:13. doi: 10.2316/Journal.209.2013.1.209-0015
Okita, S. Y., Ng-Thow-Hing, V., and Sarvadevabhatla, R. (2009). “Learning together: ASIMO developing an interactive learning partnership with children,” RO-MAN 2009-The 18th IEEE International Symposium on Robot and Human Interactive Communication (Toyama), 1125–1130. doi: 10.1109/ROMAN.2009.5326135
Oliveira, R., Arriaga, P., Correia, F., and Paiva, A. (2019). “The stereotype content model applied to human-robot interactions in groups,” in 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI) (Daegu), 123–132. doi: 10.1109/HRI.2019.8673171
Park, H. W., Rosenberg-Kima, R., Rosenberg, M., Gordon, G., and Breazeal, C. (2017). “Growing growth mindset with a social robot peer,” in 12th ACM/IEEE International Conference on Human Robot Interaction (Vienna: ACM). Retrieved from: http://robotic.media.mit.edu/wp-content/uploads/sites/14/2017/01/park2017hri-mindset.pdf
Patton, M. Q. (2014). Qualitative Research & Evaluation Methods: Integrating Theory and Practice. SAGE Publications.
Pendry, L. F., and Salvatore, J. (2015). Individual and social benefits of online discussion forums. Comput. Hum. Behav. 50, 211–220. doi: 10.1016/j.chb.2015.03.067
Pfeifer, A, and Lugrin, B. (2018). “Female robots as role-models? - The influence of robot gender and learning materials on learning success,” in Artificial Intelligence in Education. AIED 2018. Lecture Notes in Computer Science, Vol 10948, eds C. Penstein Rosé, et al. (Cham: Springer), 276–280. doi: 10.1007/978-3-319-93846-2_51
Phillips, L. D., and Phillips, M. C. (1993). Faciliated work groups: theory and practice. J. Operat. Res. Soc. 44, 533–549. doi: 10.1057/jors.1993.96
Reeves, B., and Nass, C. I. (1996). The Media Equation: How People Treat Computers, Television, and New Media Like Real People and Places. Cambridge University Press.
Rosenberg-Kima, R. B., Koren, Y., Yachini, M., and Godon, G. (2019). “Human-Robot-Collaboration (HRC): social robots as teaching assistants for training activities in small groups,” in Proceedings of the 2019 ACM/IEEE International Conference on Human-Robot Interaction (Daegu). doi: 10.1109/HRI.2019.8673103
Saavedra, A. R., and Opfer, V. D. (2012). Learning 21st-century skills requires 21st-century teaching. Phi Delta Kappan 94, 8–13. doi: 10.1177/003172171209400203
Saenab, S., Yunus, S. R., Saleh, A. R., Virninda, A. N., Hamka, L, and Sofyan, N. A. (2018). Project-based learning as the atmoshphere for promoting students' communication skills. J. Phys. 1028:012026. doi: 10.1088/1742-6596/1028/1/012026
Scassellati, B., Boccanfuso, L., Huang, C.-M., Mademtzi, M., Qin, M., Salomons, N., et al. (2018). Improving social skills in children with ASD using a long-term, in-home social robot. Sci. Robot. 3:eaat7544. doi: 10.1126/scirobotics.aat7544
Schmidt, S. M. P., and Ralph, D. L. (2016). The flipped classroom: a twist on teaching. Contemp. Issue Educ. Res. 9, 1–6. doi: 10.19030/cier.v9i1.9544
Shen, S., Slovak, P., and Jung, M. F. (2018). “Stop. I see a conflict happening: a robot mediator for young children's interpersonal conflict resolution,” in Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction (New York, NY), 69–77. doi: 10.1145/3171221.3171248
Shiomi, M., Kanda, T., Howley, I., Hayashi, K., and Hagita, N. (2015). Can a social robot stimulate science curiosity in classrooms? Int. J. Soc. Robot. 7, 641–652. doi: 10.1007/s12369-015-0303-1
Short, E., Swift-Spong, K., Greczek, J., Ramachandran, A., Litoiu, A., Grigore, E. C., et al. (2014). “How to train your DragonBot: socially assistive robots for teaching children about nutrition through play,” in The 23rd IEEE International Symposium on Robot and Human Interactive Communication (Edinburgh), 924–929. doi: 10.1109/ROMAN.2014.6926371
Shulman, L. S. (1986). Those who understand: knowledge growth in teaching. Educ. Res. 15, 4–14. doi: 10.3102/0013189X015002004
Sisman, B., Gunay, D., and Kucuk, S. (2019). Development and validation of an educational robot attitude scale (ERAS) for secondary school students. Interact. Learn. Environ. 27, 377–388. doi: 10.1080/10494820.2018.1474234
Spaulding, S., Gordon, G., and Breazeal, C. (2016). “Affect-aware student models for robot tutors,” in Proceedings of the 2016 International Conference on Autonomous Agents & Multiagent Systems, 864–872. Retrieved from: http://dl.acm.org/citation.cfm?id=2937050
Strohkorb, S., Leite, I., Warren, N., and Scassellati, B. (2015). “Classification of children's social dominance in group interactions with robots,” in Proceedings of the 2015 ACM on International Conference on Multimodal Interaction (New York, NY), 227–234. doi: 10.1145/2818346.2820735
Tahir, Y., Rasheed, U., Dauwels, S., and Dauwels, J. (2014). “Perception of humanoid social mediator in two-person dialogs,” in Proceedings of the 2014 ACM/IEEE International Conference on Human-Robot Interaction (New York, NY), 300–301. doi: 10.1145/2559636.2559831
ten Dam, G., and Volman, M. (2004). Critical thinking as a citizenship competence: teaching strategies. Learn. Instruct. 14, 359–379. doi: 10.1016/j.learninstruc.2004.01.005
Thomas, G., and Thorpe, S. (2019). Enhancing the facilitation of online groups in higher education: a review of the literature on face-to-face and online group-facilitation. Interact. Learn. Environ. 27, 62–71. doi: 10.1080/10494820.2018.1451897
Trilling, B., and Fadel, C. (2012). 21st Century Skills: Learning for Life in Our Times. John Wiley & Sons.
Wainer, J., Feil-Seifer, D. J., Shell, D. A., and Mataric, M. J. (2006). “The role of physical embodiment in human-robot interaction,” in ROMAN 2006-The 15th IEEE International Symposium on Robot and Human Interactive Communication (Hatfield), 117–122. doi: 10.1109/ROMAN.2006.314404
Keywords: social-robots, human-robot interaction, collaborative learning, active learning, educational technology, higher education
Citation: Rosenberg-Kima RB, Koren Y and Gordon G (2020) Robot-Supported Collaborative Learning (RSCL): Social Robots as Teaching Assistants for Higher Education Small Group Facilitation. Front. Robot. AI 6:148. doi: 10.3389/frobt.2019.00148
Received: 29 September 2019; Accepted: 13 December 2019;
Published: 10 January 2020.
Edited by:
Agnese Augello, Institute for High Performance Computing and Networking (ICAR), ItalyReviewed by:
Sofia Serholt, University of Gothenburg, SwedenCopyright © 2020 Rosenberg-Kima, Koren and Gordon. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Goren Gordon, Z29yZW5AZ29yZW5nb3Jkb24uY29t
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.