
94% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
ORIGINAL RESEARCH article
Front. Plant Sci. , 05 July 2024
Sec. Technical Advances in Plant Science
Volume 15 - 2024 | https://doi.org/10.3389/fpls.2024.1415006
This article is part of the Research Topic Harnessing Machine Learning to Decode Plant-Microbiome Dynamics for Sustainable Agriculture View all 15 articles
 Zuoliang Tang1,2
Zuoliang Tang1,2 Lijia Xu1*
Lijia Xu1* Haoyang Li1Mingyou Chen3
Haoyang Li1Mingyou Chen3 Xiaoshi Shi1,2Long Zhou1Yuchao Wang1Zhijun Wu1
Xiaoshi Shi1,2Long Zhou1Yuchao Wang1Zhijun Wu1 Yongpeng Zhao1Kun Ruan2
Yongpeng Zhao1Kun Ruan2 Yong He4
Yong He4 Wei Ma5Ning Yang6Lufeng Luo3Yunqiao Qiu7
Wei Ma5Ning Yang6Lufeng Luo3Yunqiao Qiu7This study addresses the challenges of low detection precision and limited generalization across various ripeness levels and varieties for large non-green-ripe citrus fruits in complex scenarios. We present a high-precision and lightweight model, YOLOC-tiny, built upon YOLOv7, which utilizes EfficientNet-B0 as the feature extraction backbone network. To augment sensing capabilities and improve detection accuracy, we embed a spatial and channel composite attention mechanism, the convolutional block attention module (CBAM), into the head’s efficient aggregation network. Additionally, we introduce an adaptive and complete intersection over union regression loss function, designed by integrating the phenotypic features of large non-green-ripe citrus, to mitigate the impact of data noise and efficiently calculate detection loss. Finally, a layer-based adaptive magnitude pruning strategy is employed to further eliminate redundant connections and parameters in the model. Targeting three types of citrus widely planted in Sichuan Province—navel orange, Ehime Jelly orange, and Harumi tangerine—YOLOC-tiny achieves an impressive mean average precision (mAP) of 83.0%, surpassing most other state-of-the-art (SOTA) detectors in the same class. Compared with YOLOv7 and YOLOv8x, its mAP improved by 1.7% and 1.9%, respectively, with a parameter count of only 4.2M. In picking robot deployment applications, YOLOC-tiny attains an accuracy of 92.8% at a rate of 59 frames per second. This study provides a theoretical foundation and technical reference for upgrading and optimizing low-computing-power ground-based robots, such as those used for fruit picking and orchard inspection.
Citrus is one of the most widely cultivated and highest-yielding fruit crops globally, generating significant economic value (The United States Department of Agriculture, 2024). However, the citrus industry faces immense pressure due to skilled labor shortages, rising production costs, market demand fluctuations, and extreme climate changes (Castro-Garcia et al., 2019; Apolo-Apolo et al., 2020a). Agricultural robots can mitigate these pressures by reducing reliance on skilled labor, lowering economic and environmental costs, and enhancing orchard management and productivity (Bargoti and Underwood, 2017; Fu et al., 2020a). Accurate fruit detection is essential for automated harvesting and early yield prediction (Zhuang et al., 2018; Apolo-Apolo et al., 2020b; Lu et al., 2023). Consequently, the detection of citrus fruits has become a research hotspot (Wang et al., 2022c; Ma et al., 2024). Particularly, there is an urgent need for high-performance detection models that can be deployed on resource-limited robots and other edge devices (Tang et al., 2020; Xu et al., 2023).
Multispectral cameras, optical digital cameras, 3D stereoscopic cameras, and RGB-D depth cameras are the primary devices used for fruit detection (Chen et al., 2020; Condotta et al., 2020). Multispectral cameras can capture spectral information across various bands from visible to near-infrared and are commonly mounted on unmanned aerial vehicles for large-scale crop health, yield estimation, and disease monitoring (Huang et al., 2020; Lan et al., 2020). However, their high cost and complex data processing requirements limit their application in ground-based agricultural robots. Optical digital cameras, 3D stereoscopic cameras, and RGB-D depth cameras typically produce RGB images with three visible light bands: red, green, and blue. Many studies have shown that RGB images are sufficient for fruit detection (Lu et al., 2018; Yu et al., 2019; Gené-Mola et al., 2020; Liu et al., 2023). These devices are cost-effective and require less computational power, making them more suitable for the practical needs of real-time monitoring and automated harvesting robots.
Over the past few decades, methods combining digital image processing with traditional machine learning (ML) techniques have been used for fruit detection, including citrus (Liu et al., 2018), kiwifruit (Fu et al., 2019), and apples (Lu et al., 2022). However, the pixel values in RGB images are highly sensitive to changes in lighting and background interference. Traditional ML algorithms, such as support vector machines and decision trees, rely on complex feature extraction and manual rules to handle these variations (Fu et al., 2018). Consequently, these algorithms exhibit performance fluctuations in complex environments and fail to meet the need for stable citrus fruit detection by robots in real-world scenarios.
In recent years, the advancement of deep learning (DL) technology has significantly impacted the field of agricultural detection due to its exceptional feature learning capability, robust generalization performance, and substantial computational power (Gené-Mola et al., 2020; Maheswari et al., 2021). DL methods for fruit detection are broadly categorized into two main approaches: region-based two-stage methods (Girshick et al., 2014; Shaoqing et al., 2016) and end-to-end single-stage methods (Redmon et al., 2016; Wei et al., 2016).
Two-stage detection methods first extract a large number of regions of interest (RoIs) that potentially contain target fruits. These RoIs are then passed through a convolutional neural network (CNN) for detection, with final detection results obtained after post-processing (Girshick et al., 2014; Shaoqing et al., 2016). Although this process is time-consuming, these methods typically achieve high detection precision due to the utilization of CNNs for fruit detection on RoIs (Redmon et al., 2016). For example, C.H. Yang et al. (Yang et al., 2020) developed a citrus fruit detection algorithm based on Mask R-CNN, achieving a detection precision of 88.15%. Longsheng Fu et al. (Fu et al., 2020b) proposed an apple detection algorithm based on Faster R-CNN, achieving a detection precision of 89.3%. However, the inherent characteristics of two-stage methods, including slower detection speed and high memory consumption, limit their suitability for applications such as harvesting robots, which require rapid detection and are constrained by computational resources.
In contrast, the YOLO series of single-stage detection methods, introduced in 2015, offers faster detection speeds and high detection accuracy (Redmon et al., 2016). YOLO models perform target detection in a single pass through a CNN, eliminating the need for separate stages and reducing redundant operations (Redmon et al., 2016; Wang et al., 2022a). While early YOLO models had lower detection accuracy compared to two-stage models like R-CNN, subsequent optimizations, and improvements by numerous researchers have led to the development of several highly effective fruit detection methods. For instance, Longsheng Fu et al. (Fu et al., 2021) proposed a kiwifruit detection algorithm, DY3TNet, by improving the YOLOv3-tiny model, achieving a detection precision of 90.05%. Shenglian Lu et al. (Lu et al., 2022) developed the CA-YOLOv4 detection algorithm for apples in orchard environments, achieving a detection precision of 92.6% for Envy apples during harvest. Additionally, Lijia Xu et al. (Xu et al., 2023) proposed the HPL-YOLOv4 citrus detection model for complex environments, achieving a detection precision of 93.45%.
Citrus is a general term for fruits belonging to the Citrus genus of the Rutaceae family, with major types including grapefruit, lemon, tangerine, and orange (Liu et al., 2012). Among these, navel oranges, Ehime Jelly oranges, and Harumi tangerines are widely cultivated in the southwestern regions of China, and their fruits turn orange-red upon ripening. In this study, we refer to them as non-green-ripe citrus. While existing models can detect single-variety or single-degree ripeness fruits, such as apples or certain citrus fruits (Lu et al., 2018, 2022), there remains an urgent need for a real-time and accurate detection model for multi-ripeness fruits of different non-green-ripe citrus varieties in complex orchards. To address this issue, we first collected and created a custom image dataset of non-green-ripe citrus, covering the detection needs of unripe, semi-ripe, and ripe fruits. We then proposed a lightweight, single-stage citrus detection model suitable for deployment on edge devices such as robots. The main contributions of this work are as follows:
(1) We designed a comprehensive image dataset, RC3025, which includes images of non-green-ripe citrus fruits of various varieties and ripeness levels in complex scenarios.
(2) We discovered and proposed that incorporating a small number of pure citrus fruit images into the training set enhances the model’s detection performance in real orchards.
(3) We developed a general, lightweight, and high-performance multi-ripeness citrus recognition model, YOLOC-tiny, based on YOLOv7.
(4) We validated the practical performance and advantages of YOLOC-tiny through robot deployment application experiments, demonstrating its effectiveness in detecting non-green-ripe citrus fruits in complex environments.
To properly train the developed DL model, a number of raw images are required as an initial dataset (Apolo-Apolo et al., 2020a). Research suggests that 2,500 annotated instances are adequate for training deep networks to recognize a certain type of fruit (Wang et al., 2022b). From 2020 to late 2023, we continuously collected raw images over four years using both manual and robotic photography, as shown in Figure 1. Various imaging devices, including a 3D stereoscopic camera (ZED), a Canon 80D camera, and four different mobile phones (VIVO Y97, Mi 10, Redmi K40, and iPhone Xs), were employed to capture images of citrus fruits at different ripeness levels and varieties in three non-green-ripe citrus orchards. These orchards are located in three different counties in the western part of Sichuan Province: Yucheng District, Ya’an City (29°58′N, 102°59′E); Jintang County, Chengdu City (30°43′N, 104°29′E); and Danling County, Meishan City (29°58′N, 103°32′E). To meet the operational needs of ground-based agricultural robots, the shooting distance ranged from 0.3 to 1.2 meters.
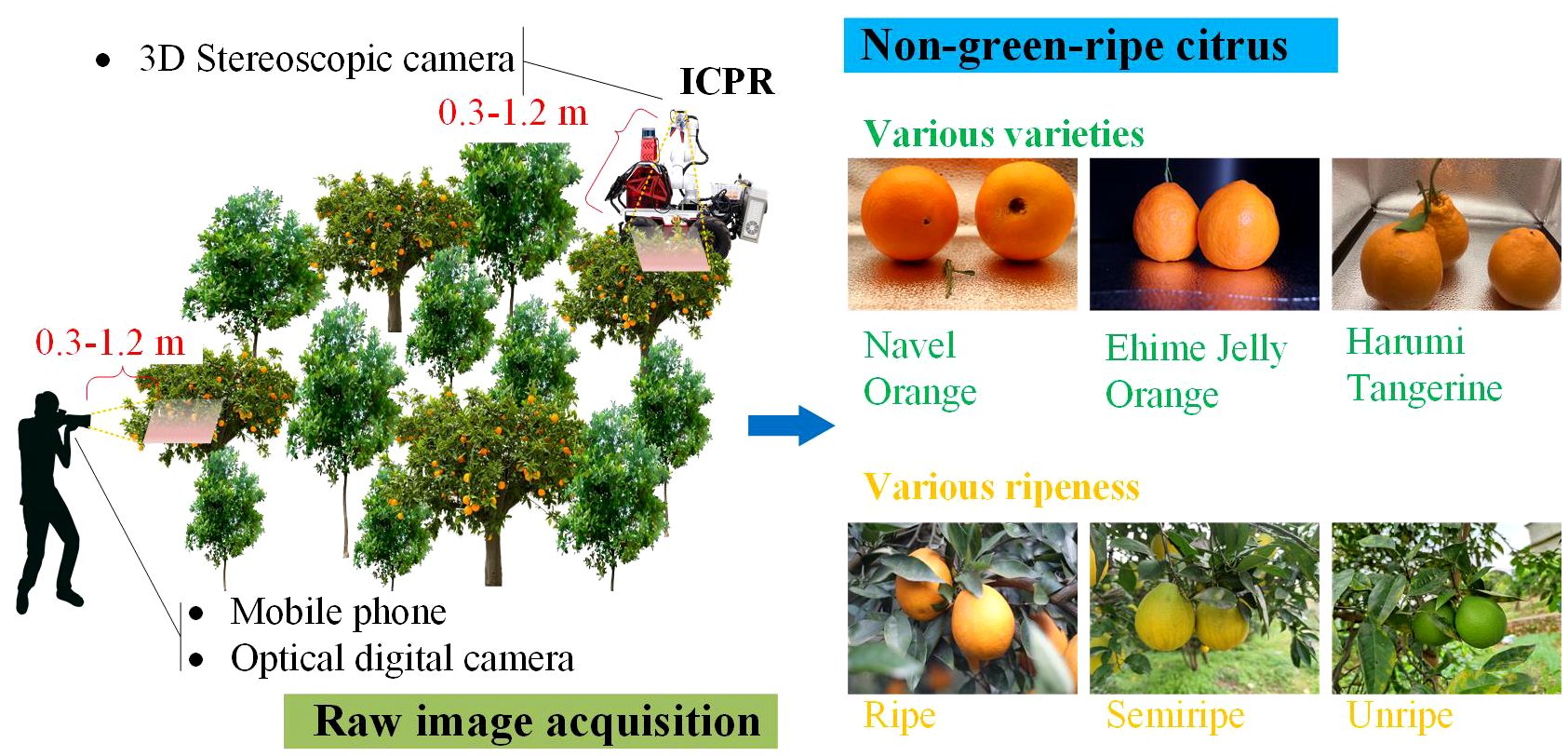
Figure 1 Schematic diagram of how to capture the images of non-green-ripe citrus fruits and some examples.
Experienced researchers screened the raw images and collected a total of 2,905 image data samples covering three citrus varieties (navel orange, Ehime Jelly orange, and Harumi tangerine) at different ripeness levels in unstructured orchards. Additionally, to investigate whether pure citrus images could enhance model detection performance, 120 images featuring pure citrus fruits were captured in the laboratory using both ZED and digital cameras. Specifically, the sections pertaining to citrus images in complex orchards and pure citrus images were separately labeled as RC2905 and RC120. The labeling process for the 3,025 images was completed using the open-source tool LabelImg (Tzutalin, 2015), and the citrus image dataset RC3025 (raw citrus dataset with 3,025 images) was created, comprising a total of 10,653 labeled instances. Details of the dataset are shown in Supplementary Table 1.
Several studies have successfully used a 10% validation split (Lu et al., 2022; Liu et al., 2023; Xu et al., 2023), achieving significant detection results. To balance computational resources and maintain training efficiency, the RC2905 dataset was partitioned into the raw training set (TRAIN-R), the raw validation set (VAL-R), and the raw test set (TEST-R) in an 8:1:1 ratio, as illustrated in Figure 2. The RC120 dataset was employed to investigate the impact of pure citrus images on model performance by randomly substituting 120 images in TRAIN-R, defining the refined training set as FTRAIN-R after fine-tuning. TEST-R was further categorized based on background complexity and citrus occlusion, resulting in a complex background test set comprising 166 images (TEST-RCE) and a simple background test set with 124 images (TEST-RSE). Given the variations in light intensity, the test set was further stratified into a set containing 228 images with normal light intensity (TEST-RNL) and another set containing 62 images under low-light conditions (TEST-RWL).
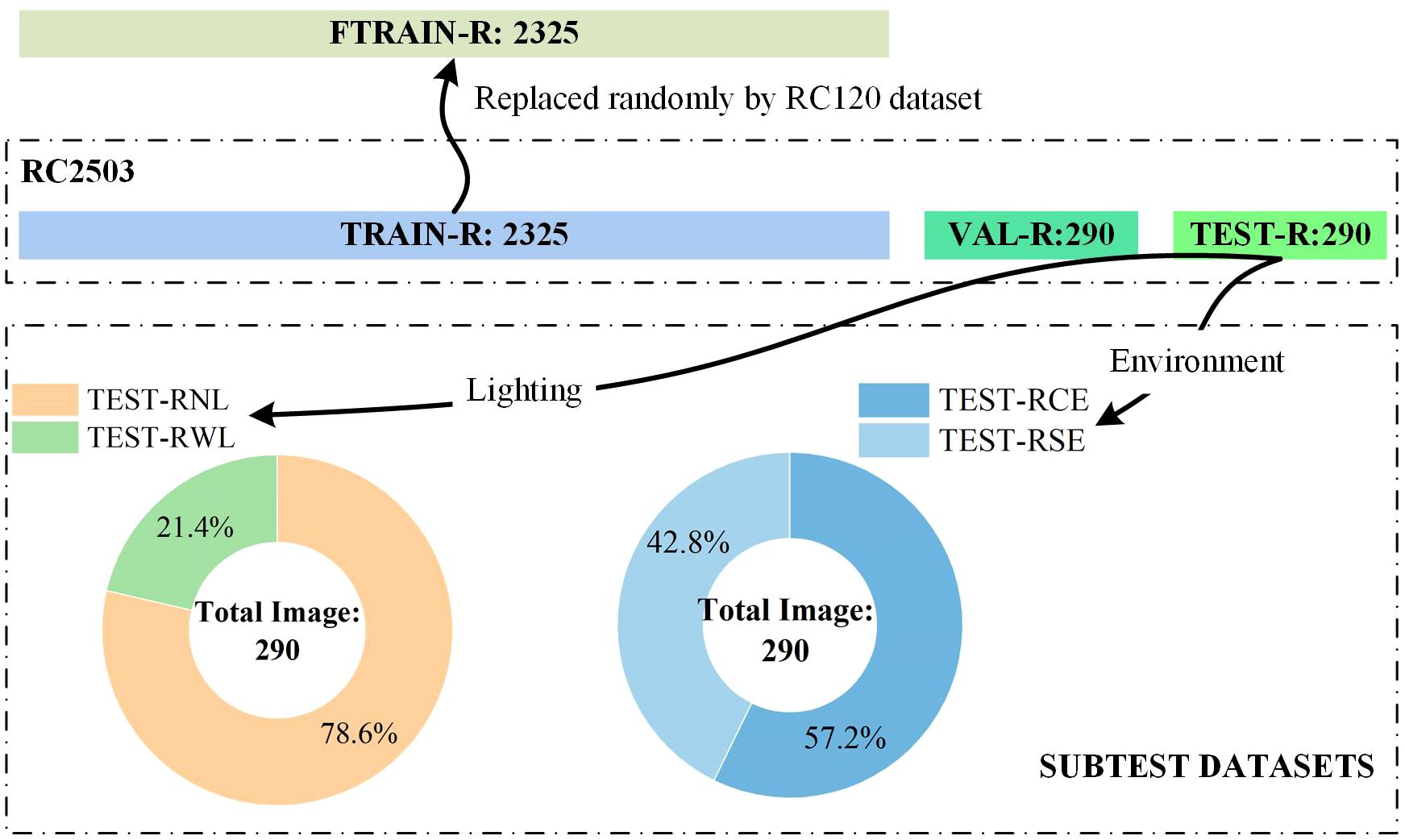
Figure 2 Diagram of dataset partitions.
Many studies demonstrated that enhancing raw images can improve the model’s generalization ability. In the present study, seven enhancement methods, including affine transformation, luminance adjustment, cut-out, coarse dropout, Gaussian noise, motion blur, and salt–pepper noise, were employed to augment the training and validation sets, as illustrated in Figure 3. These enhancement operations were executed on TRAIN-R, VAL-R, TEST-R and FTRAIN-R, resulting in the corresponding enhanced datasets TRAIN-A, VAL-A, TEST-A and FTRAIN-A, respectively. Three enhancement methods—up and down flip, contrast adjustment, and Gaussian blur—were simultaneously applied to the test set. Two datasets, TEST-ANL and TEST-AWL, were generated by enhancing the original test set of normal and weak light environments. Additionally, the TEST-ACE and TEST-ASE datasets were created by augmenting the original test sets of complex and simple environments, respectively. These enhanced datasets aim to simulate accurately the diverse lighting conditions, backgrounds, and fruit states in real-life orchard scenes, thereby bolstering the robustness and accuracy of the detection models in practical scenarios. An overview of the augmented dataset and the number of images is provided in Supplementary Table 2.
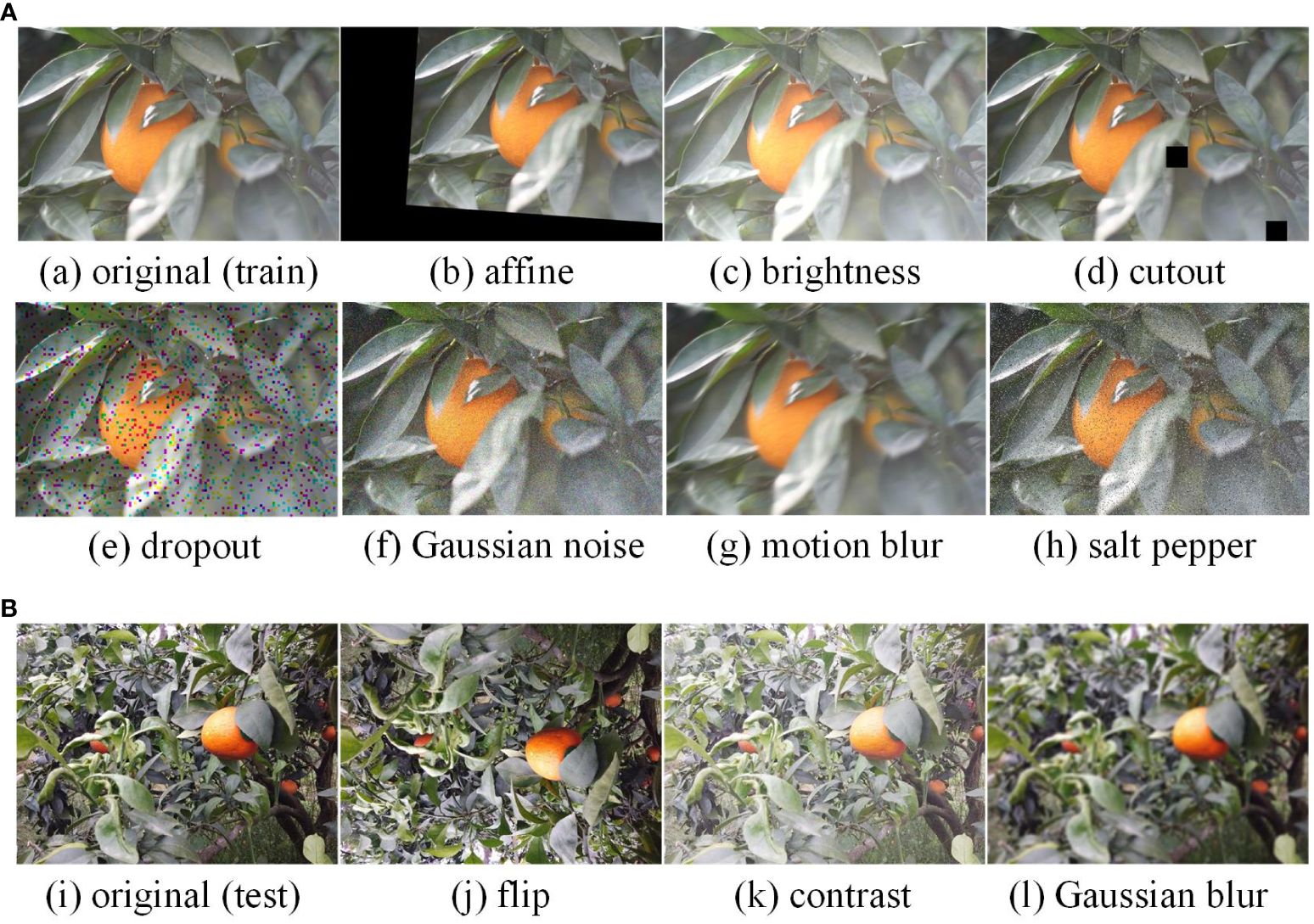
Figure 3 Image augmentations. (A) Augmentation methods for TRAIN-R, FTRAIN-R, and VAL-R: affine transformation, brightness adjustment, cutout, coarse dropout, Gaussian noise, motion blur, and salt and pepper noise. (B) Augmentation methods for TEST-R: up and down flip, contrast adjustment, and Gaussian blur.
Orchard operation robots face constraints due to limited computational resources, whereas traditional DL models pose challenges with their high computational complexity and demanding hardware requirements. To ensure that robots can reliably, accurately, and efficiently detect various types and ripeness levels of citrus fruits in complex non-green-ripe citrus orchards, we initially used our custom datasets TRAIN-A, VAL-A, and TEST-A to train and test most of the popular SOTA object detectors, including YOLOv7 and YOLOv8. Based on the practical needs of robotic operations and the experiment results, we chose YOLOv7 (Wang et al., 2022a) as the foundational network and conducted a series of optimizations and improvements.
Given the large size of the YOLOv7 backbone network, we selected a lightweight feature extraction network, EfficientNet-B0, to replace the original backbone. After comparing various advanced attention mechanisms, we introduced a composite efficient attention mechanism, CBAM, to enhance target perception. Subsequently, after numerous experiments, we carefully designed an extended efficient aggregation network module incorporating CBAM, called Efficient Layer Aggregation Networks in the Head with CBAM (ELAN-HC). Considering the phenotypic features of the targets, we proposed an adaptive and efficient complete intersection over the union regression loss function (ACIoU). This function allows for adjustments to the aspect ratio regression loss penalty factor, enhancing the perception ability of citrus fruits and consequently improving detection accuracy.
We integrated these measures to develop a generalized base network, YOLOC, where C stands for citrus, to recognize non-green-ripe citrus varieties such as navel orange, Ehime jelly orange, and Harumi tangerine in complex environments, particularly in the hilly areas of southwest China. The structure of YOLOC is depicted in Figure 4, where RepConv denotes reparametrized convolution. Furthermore, we leveraged transfer learning to train YOLOC on FTRAIN-A and employed sparse training and Layer-based Adaptive Magnitude Pruning (LAMP), a quantized pruning technique, to derive a lightweight recognition model, YOLOC-tiny.

Figure 4 Structure of the YOLOC network.
The accuracy of target detection and localization is significantly influenced by the choice of the loss function (Yu et al., 2022). The loss function was computed based on the intersection over union (IoU), and the CIoU utilized by YOLOv7 comprehensively considered the variations in the overlap area, center distance, and aspect ratio between the predicted box and the ground truth box (Zheng et al., 2020), as illustrated in (Equations 1–3).
where denotes the loss value, represents the IoU ratio between the ground truth box and the predicted box, signifies the Euclidean pixel distance between the ground truth box and the predicted, represents the diagonal length of the smallest enclosing area that surrounds both the predicted and ground truth bounding boxes, is the acquired trade-off coefficient, denotes the consistency factor of the width and height of the predicted box and the ground truth box, and are the width and height of the ground truth box, respectively, and and are the width and height of the predicted box, respectively.
The CIoU loss function is commonly employed in target detection tasks; however, it exhibits the following drawbacks (Yu et al., 2022): (1) The use of an inverse tangent function in CIoU makes it highly sensitive to outliers, resulting in poor robustness. (2) The value domain of the inverse tangent function cannot directly fulfill the normalization requirements of the loss function. (3) Adaptability to adjust the corresponding features of the loss function based on the detection object is lacking. Hence, considering the phenotypic features of the large non-green-ripe citrus fruits, we proposed ACIoU. This function can dynamically adjust the length and width regression loss penalty factor based on the phenotypic parameters of citrus fruits, as depicted in (Equations 4–6).
where represents the value of the ACIoU function, and denotes the adaptive Sigmoid deformation parameters that can be adjusted based on different aspect ratios of the detection targets, and signifies the adaptive consistency factor of the width and height of the predicted box and the ground truth box.
The variation curves of the width and height difference loss penalty terms corresponding to the real and predicted boxes for different deformation parameters, and , are presented in Figure 5. The disparity between the length and width of the ground truth box of citrus fruits is smaller than that in Microsoft Common Objects in Context (COCO). We randomly selected 47 citrus fruits with different maturity levels from the orchard of Ya’an Yucheng District, and their average transverse and longitudinal diameters were measured using vernier calipers. The transverse diameter represents the maximum equatorial diameter of the mandarin orange. The longitudinal diameter is the straight-line distance between the pith (at the stalk) and the center of the top of the fruit, as shown in Figure 6. The measured average longitudinal diameter of citrus was 68.04 mm, the average transverse diameter was 64.94 mm, and the average aspect ratio was 1.05. These measurements can serve as a reference for adaptively adjusting the loss function width and high consistency evaluation index.
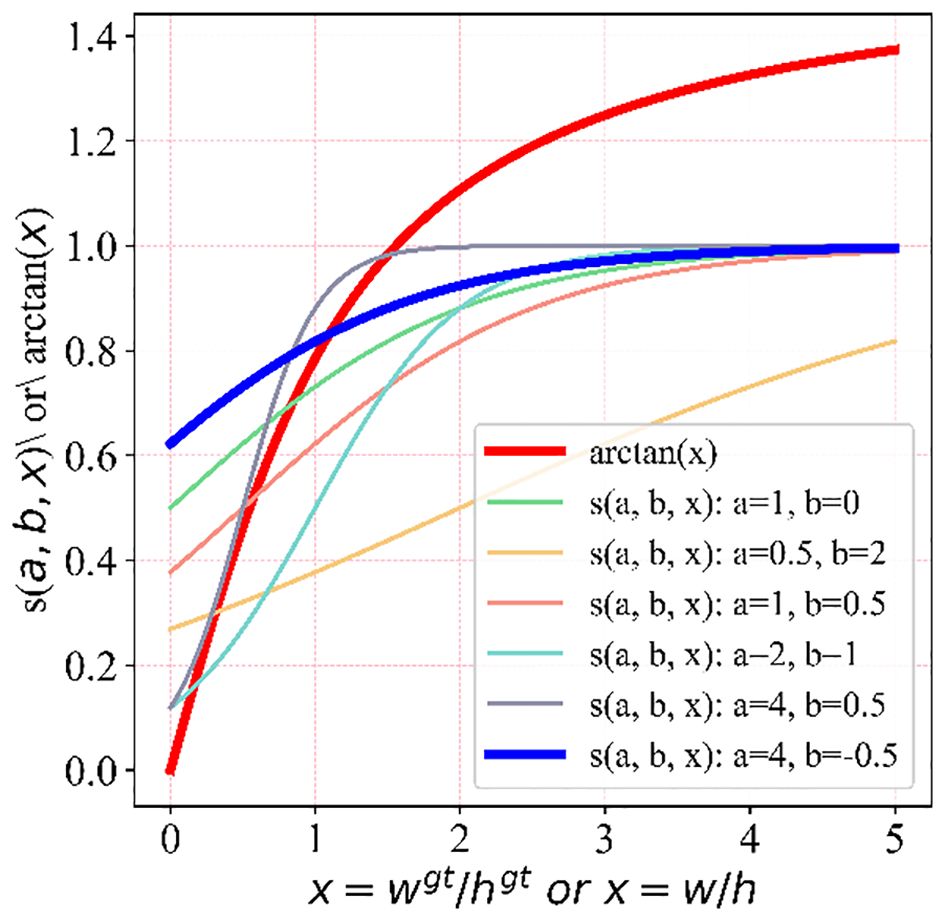
Figure 5 Loss penalty curves of the width and height differences with different deformation parameters.

Figure 6 Measurement methods of longitudinal and transverse diameters and samples. (A) Measurement method of citrus fruit longitudinal diameter. (B) Measurement method of citrus fruit transverse diameter. (C) Samples of citrus fruits.
This study utilized EfficientNet-B0 as the feature extraction backbone to optimize the model parameters for practical deployment in orchard robots for recognizing large non-green-ripe citrus. EfficientNet-B0, a lightweight and high-performance neural network, was designed using neural architecture search. The architecture primarily consists of mobile inverted bottleneck convolutions (MBConv), as illustrated in Supplementary Figure 1. MBConv integrates depthwise separable convolutions (DWConv) with Squeeze-and-Excitation (SE) blocks and inverse residual blocks. The SE module within MBConv dynamically recalibrates channel-wise feature responses by explicitly modeling interdependencies between the channels. With its DWConv and SE modules, MBConv offers a lightweight structure while maintaining good detection performance.
The spatial attention mechanism amplifies the model’s capability to concentrate on specific regions within the image, facilitating the extraction of features crucial for target detection. The channel attention mechanism guides the model to prioritize significant features in the image, thereby contributing to an overall enhancement in target detection accuracy. CBAM integrates the channel attention mechanism and the spatial attention mechanism. YOLOv7 introduces efficient layer aggregation networks in the detection head (ELAN-H), leading to significant performance improvements. Empirically drawing on engineering experience, we incorporated CBAM into the ELAN-H network module, resulting in the formation of the ELAN-HC module, as depicted in Figure 7. This integration is aimed at optimizing further the model’s detection performance for non-green-ripe citrus in the unstructured orchards.
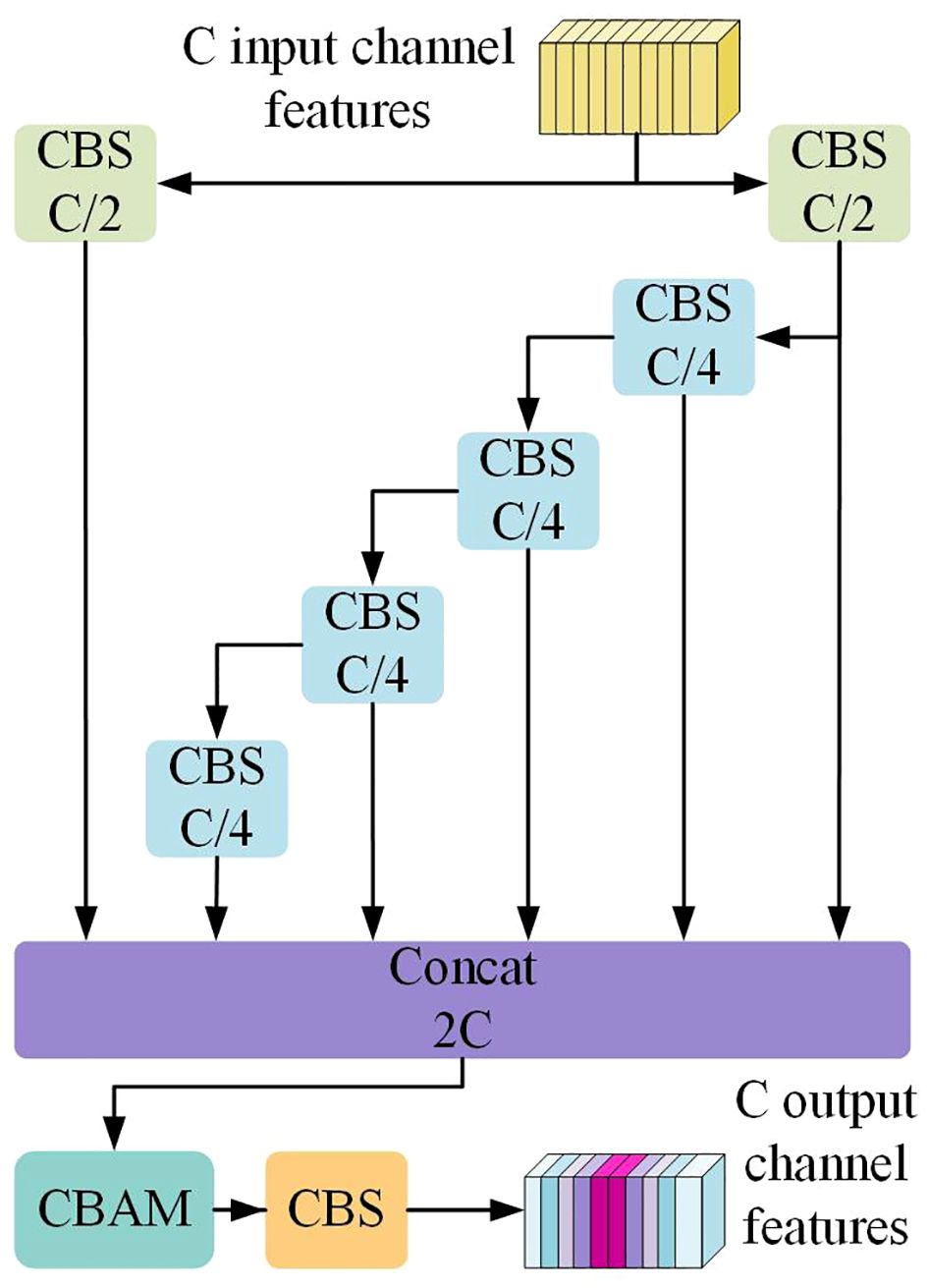
Figure 7 The structure of ELAN-HC.
We employed the LAMP pruning method on the trained YOLOC model to eliminate redundant parameters and connections, thereby enhancing the deployable performance and detection efficiency of YOLOC-tiny (Supplementary Figure 2). Subsequently, the pruned model underwent retraining in FTRAIN-A, resulting in the development of a lightweight detection model, YOLOC-tiny. The calculation for the LAMP score is expressed in Equation 7. The LAMP score was used to measure the importance of all weights in each layer of the YOLOC network to the citrus detection performance. During each round of pruning iterations, we removed the weights that contributed the least to the detection performance until the global sparsity constraint was satisfied. Thus, the model size was compressed, with little impact on its detection accuracy. LAMP retained at least one connection in each layer to ensure that at least one surviving connection was retained in each layer, thereby avoiding the loss of neurons and helping to maintain the ability to perceive non-green-ripe large citrus.
where is the th weight magnitude in the th () layer of the YOLOC network after ascending order, and is the LAMP score of .
In this study, three computers, namely, PC1, PC2 and PC3, were employed for model training, testing, and deploying applications, respectively. PC3 is a lightweight industrial control mainframe computer integrated into the self-developed intelligent citrus picking robot (ICPR), as shown in Figure 1. The detailed hardware and software configurations of the three computers are provided in Table 1.
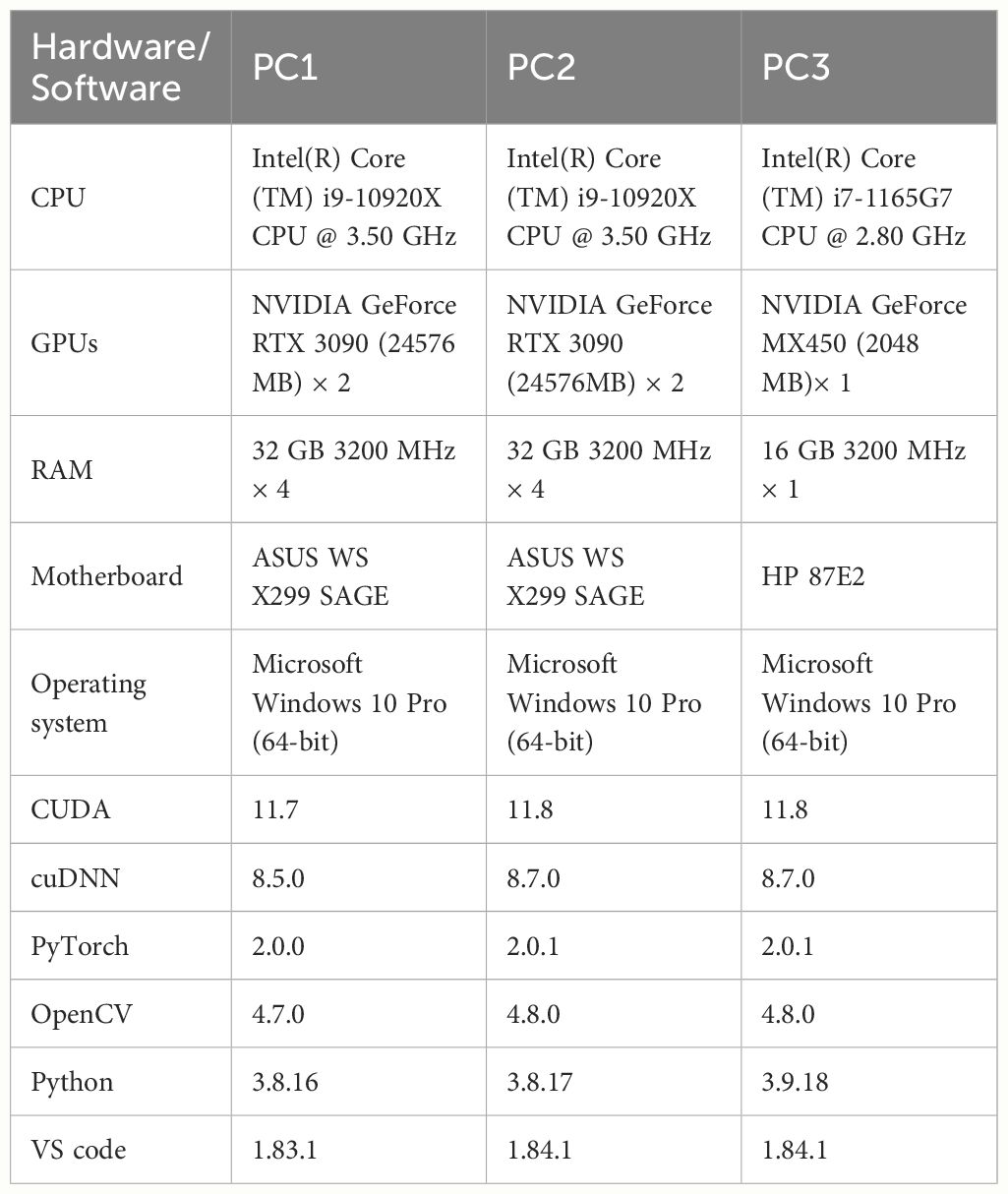
Table 1 Key hardware and software configurations of the experimental environment.
The model training was performed on PC1 and initialized with pre-trained weights from the COCO dataset. The stochastic gradient descent algorithm was used as the optimizer for model training. The training parameters included an initial learning rate of 0.01, momentum decay of 0.937, weight decay of 0.0005, a model input image size of 640 × 640, and a training epoch count of 300. A label smoothing strategy was implemented to address potential network overfitting resulting from incorrect data labeling by improving the model’s generalization ability. Additionally, online data augmentation using the mosaic method at each iteration was employed to enrich the citrus image data and further enhance the model’s generalization ability.
The model evaluation tests were conducted on PC2. The batch size for model test inputs was set to 1, the confidence threshold was 0.001, the IOU threshold was 0.6, and the model input image size was 640 × 640 by aligning with the practical conditions of the orchard robot. Given the constraints of the robot’s limited hardware resources, the models were comprehensively evaluated in this study based on three aspects, namely, basic detection performance, degree of lightweight, and detection speed, to assess the detection performance of different models. The evaluation of basic detection performance includes detection precision (P), recall (R), and mean average precision (mAP), which were calculated according to (Equations 8–10).
where (true positive) represents the count of accurately detected citrus fruits, (false positive) signifies the count of erroneously identified objects or backgrounds as citrus fruits, (false negative) corresponds to the count of undetected or inaccurately identified citrus fruits, and denotes the specific fruit type to be detected. In this study, is 3, indicating the three categories of ripe, semi-ripe, and unripe citrus fruits.
The evaluation metrics for lightweight degree encompass the memory size occupied by the model (model size), the number of parameters (params), and the model detection speed measured by the number of FPS. Additionally, we introduced four normalized evaluation indicators, including the compound evaluator (CEval), which provides a holistic assessment of the model considering basic performance, the degree of lightweight, and detection speed. The CEval, model size score, model parameter score, and frame rate score are calculated as depicted in (Equations 11–14).
where , , , , and are the weight coefficients, and their sum is 1.0. They differentiate the importance of various indicators for intelligent operation robots in orchards. , and control the thresholds for each evaluation indicator.
The curves illustrating the model size score, model parameter score, and frame rate score are presented in Figure 8. Slight variations in the FPS of each model were observed across experiments; thus, the FPS rates of all models were averaged over five tests after completing the graphics card warm-up. Aligned with the real-time target detection task and the goal of maintaining lightweight models, the threshold values (t1, t2, and t3) in this study were set at 50, 50, and 30, respectively. A high frame rate score indicates proximity to 1. However, the frame rate beyond the robot’s real-time monitoring need of 30 FPS becomes barely crucial. Conversely, parameter and model size scores approach 1 as they decrease and approach 0 as they increase.
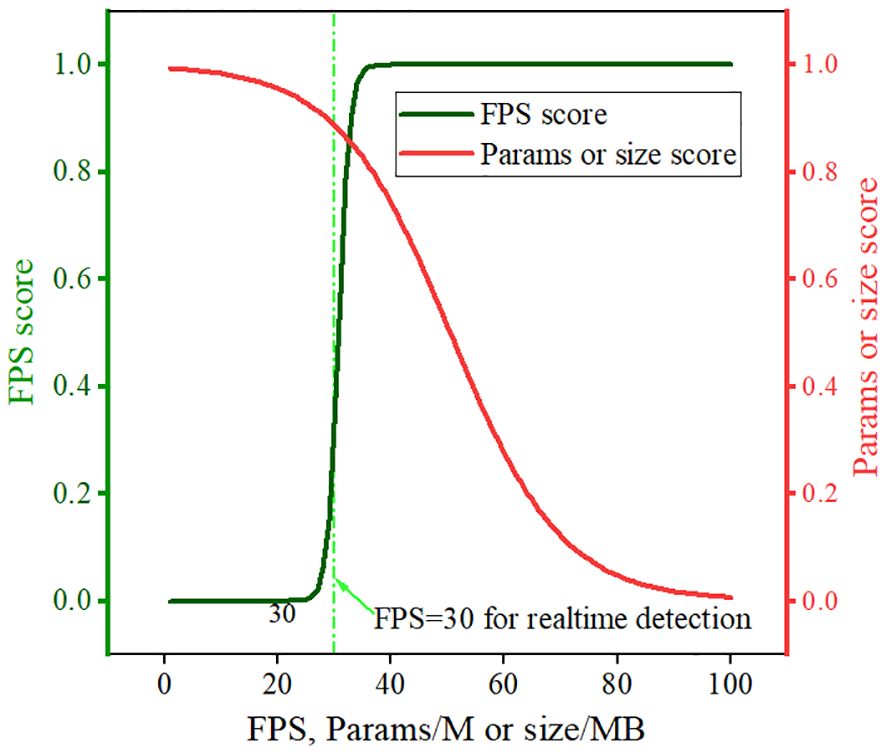
Figure 8 Evaluation metric score curves of model performance.
YOLOv7 was employed as a baseline to elucidate the impact of attention mechanisms on the detection performance of the YOLOC model. Various attention mechanisms were incorporated into the ELAN-H module, and comparative experiments were conducted to assess the detection performance for non-green-ripe large citrus. The results are presented in Table 2.
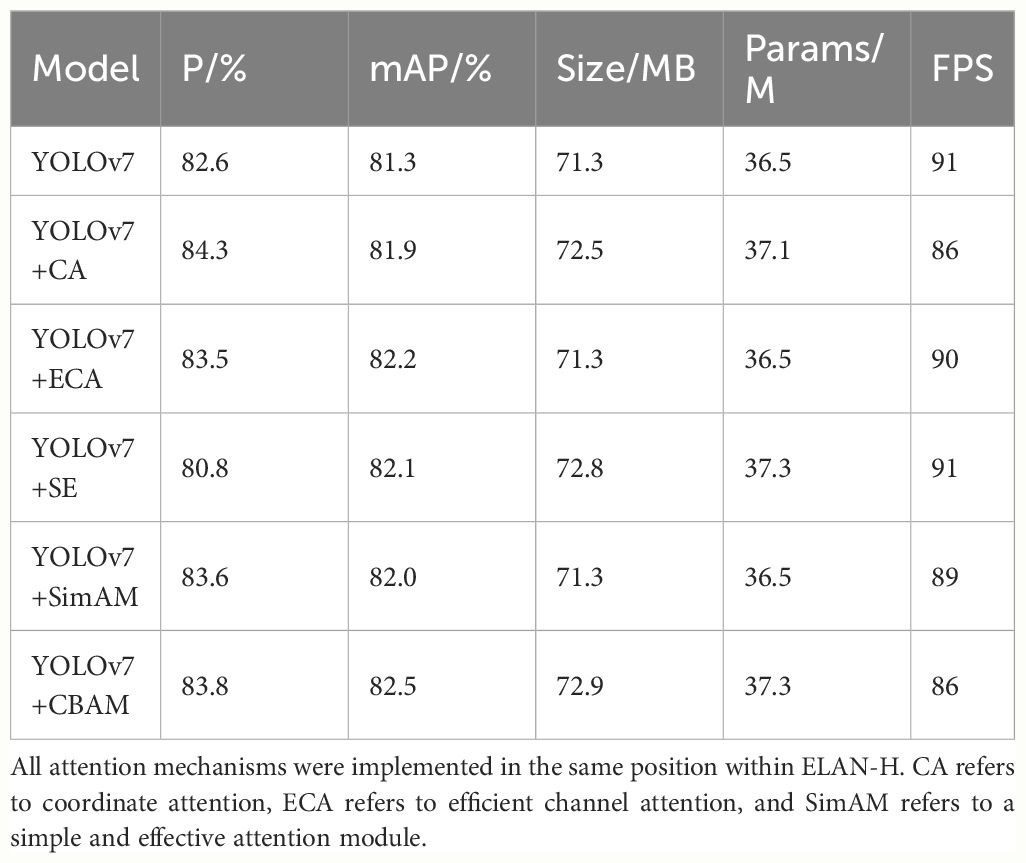
Table 2 Experimental results of incorporating various attention mechanisms.
Table 2 reveals that the introduction of different attention mechanisms impacts the model’s detection performance to varying degrees. Regarding performance metrics, YOLOv7+CBAM exhibits a detection accuracy of 83.8%, marking a 1.2 percentage point improvement over YOLOv7. Thus, it only ranks second to the YOLOv7+CA model. Compared with the average accuracy of YOLOv7, that of YOLOv7+CBAM reaches 82.5%, indicating a 1.2 percentage point increase, whereas that of YOLOv7+CA is only 81.9%. This finding suggests that YOLOv7+CBAM excels in capturing citrus image features. Although the model size and number of parameters of YOLOv7+CBAM experience a slight increase compared with those of YOLOv7, its detection accuracy is enhanced. The frame rate of YOLOv7+CBAM is 86 FPS, satisfying the real-time target detection requirements. We employed the GradCAM algorithm to generate detection heat maps for multiripeness citrus images and gain deep insights into the suitability of the CBAM attention mechanism in citrus fruit detection. The corresponding detection results are presented in Figure 9. All heat maps were generated at the same layer above the detection head of the detect network layer of the model.
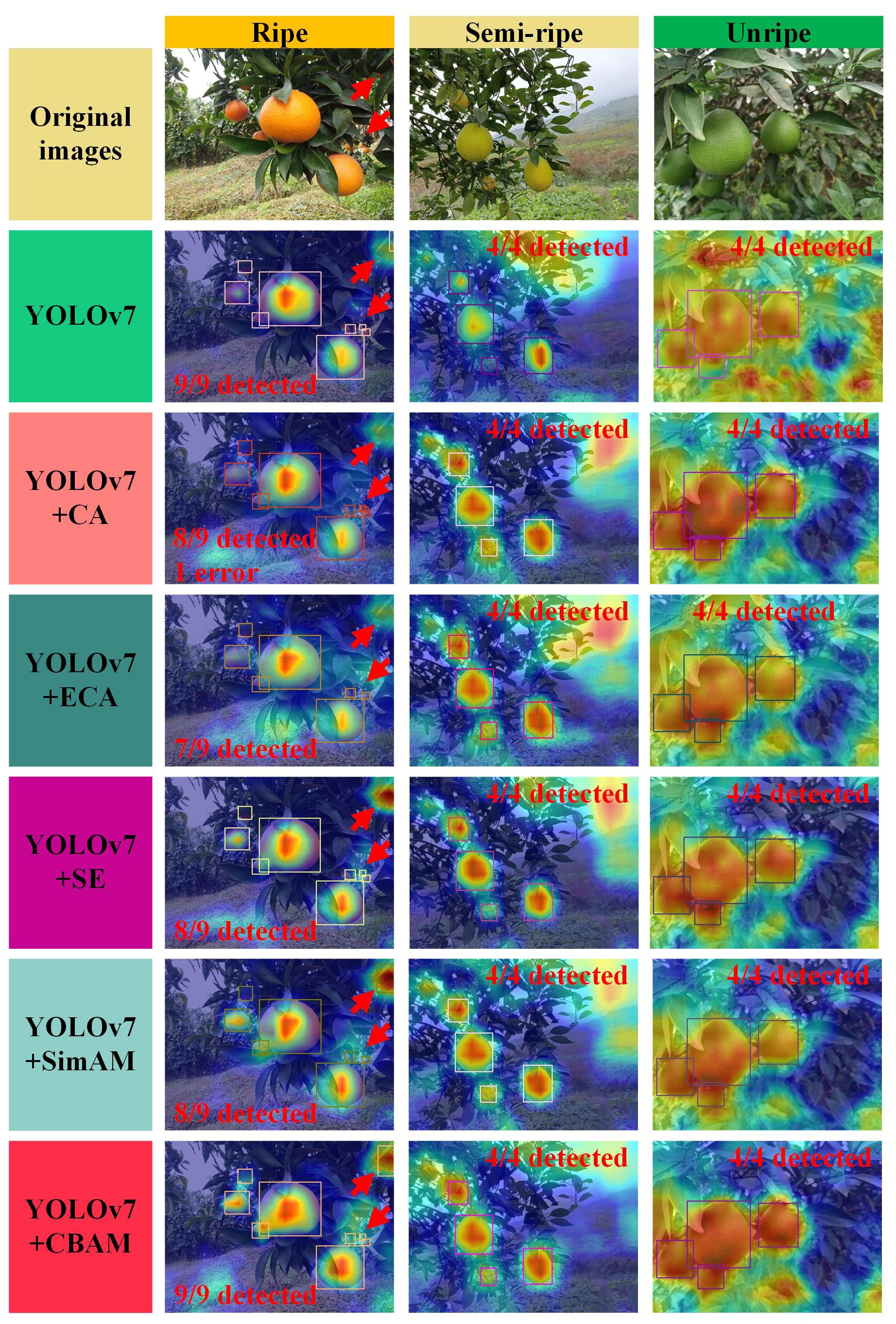
Figure 9 Thermograms and detection results of models integrated with various attention mechanisms. The red arrows indicate the locations where the detection results of different detectors are significantly different.
Figure 9 shows that different attention mechanisms allocate varying degrees of focus to citrus fruits, leading to differences in the detection performance of fruits at various ripeness levels. YOLOv7+CBAM exhibits the highest attention to citrus fruits with diverse ripeness, surpassing the attention given by YOLOv7, which allocates minimal attention to citrus fruits. For green unripe citrus, YOLOv7 distributes attention across the surroundings evenly. Despite the improvement in the model’s attention to citrus fruits with the introduction of other attention mechanisms, it still falls short of the performance achieved by the YOLOv7+CBAM model.
In terms of detection results, YOLOv7+CBAM and YOLOv7 exhibit no misdetections or omissions. By contrast, YOLOv7+CA has one omission and one misdetection in ripe citrus detection, YOLOv7+ECA has two omissions, and YOLOv7+SE and YOLOv7+SimAM have one omission in ripe citrus detection. In summary, the CBAM attention mechanism demonstrates superior performance in detecting multiripeness citrus fruits, particularly for unripe green citrus. Thus, it maintains high-precision results with no false or missed detections. Therefore, the CBAM attention mechanism proves to be well-suited for citrus fruit detection.
We conducted ablation experiments to assess comprehensively the impact of various enhancement measures on the model’s detection performance by incrementally introducing these measures with YOLOv7 as the baseline. The experimental results are presented in Table 3.
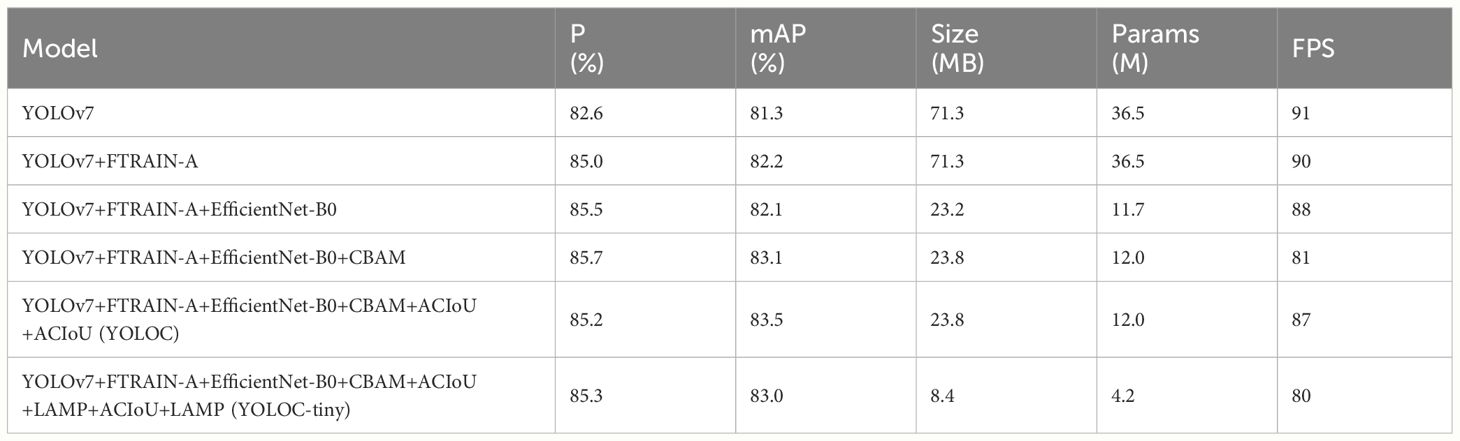
Table 3 Results of ablation experiments.
Table 3 reveals that all proposed enhancements in this study lead to varying degrees of improvement in the model’s detection accuracy or lightweight characteristics. Compared with the training set without the use of the fine-tuned training set, the YOLOv7 model with the fine-tuned training set FTRAIN-A exhibits a 2.4% improvement in P and a 0.9% improvement in mAP. Furthermore, incorporating the lightweight backbone network EfficientNet-B0 further enhances the model’s detection accuracy and increases its lightweight profile. Compared with YOLOv7, the model with the EfficientNet-B0 backbone shows a 2.9% increase in P and a 0.8% increase in mAP value whilst maintaining only 32.5% and 32.1% of the model size and number of parameters of YOLOv7, respectively.
The introduction of the ELAN-HC module with the CBAM attention mechanism leads to a slight increase in model size and a decrease in frame rate. However, the P and mAP of the model show significant improvements, reaching 85.7% and 83.1%, respectively, representing a 3.1% and 1.8% increase compared with those of YOLOv7. Given these improvements, the YOLOC model with ACIoU experiences a marginal decrease in detection accuracy by 0.5% but improves in mAP and frame rate by 0.4% and 6 FPS, respectively.
The YOLOC-tiny model, derived through pruning and retraining on top of YOLOC, excels not only in accuracy but also in achieving an extremely compact model size. In particular, the P and mAP of the model are 85.3% and 83.0%, respectively, representing 2.7% and 1.7% increases compared with those of YOLOv7. The model size of YOLOC-tiny is 8.4 MB, with only 11.8% and 11.5% of the model size and number of parameters of YOLOv7, respectively.
YOLOC-tiny was compared with the leading SOTA target detection models. The experimental results are presented in Table 4.
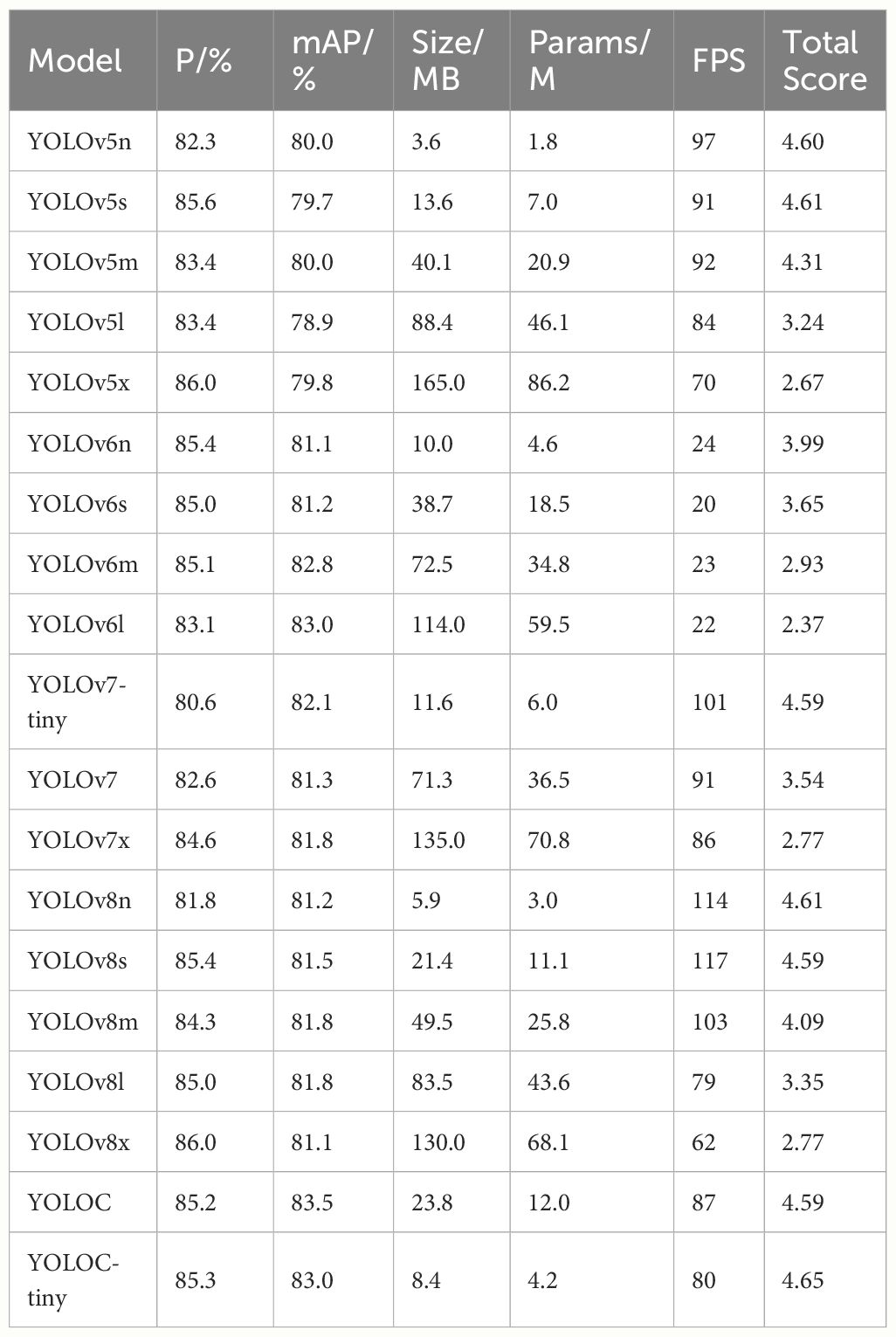
Table 4 Experimental results of different SOTA models.
Table 4 reveals that YOLOC-tiny achieves an accuracy of 85.3% in detecting multiripeness citrus fruits. This finding indicates that YOLOC-tiny outperforms most SOTA models and even surpasses YOLOC. Additionally, YOLOC-tiny attains an 83.0% mAP, ranking only second to YOLOC. YOLOC-tiny occupies a mere 8.4 MB of storage space, making it significantly more lightweight than YOLOv7x and YOLOv8x. The model’s parameter count is only 4.2 M, rendering it suitable for deployment in edge devices and resource-limited environments. Furthermore, YOLOC-tiny achieves a frame rate of 80 FPS, surpassing YOLOv8l and YOLOv8x. Thus, it is well-suited for real-time performance-critical scenarios.
We utilized the previously mentioned model lightweight, frame rate, and comprehensive performance indexes to analyze the detection performance of YOLOC series models comprehensively and thoroughly in complex environments for multiripeness and multispecies citrus fruits. The comprehensive performance diagrams of the aforementioned models were plotted, as shown in Figure 10. Figure 10 shows that YOLOC and YOLOC-tiny exhibit excellent detection performance for citrus fruits. YOLOC and YOLOC-tiny demonstrate commendable average detection accuracies, with YOLOC-tiny being more compact than other models. This compactness contributes to reduced storage requirements on edge devices. YOLOC-tiny outperforms all other SOTA models, including YOLOC, in terms of the total score. Therefore, YOLOC-tiny has significant advantages in various aspects, including detection accuracy, lightweight design, frame rate, and overall performance. It exhibits the strongest overall performance, making it highly suitable for target detection in citrus orchard scenarios.
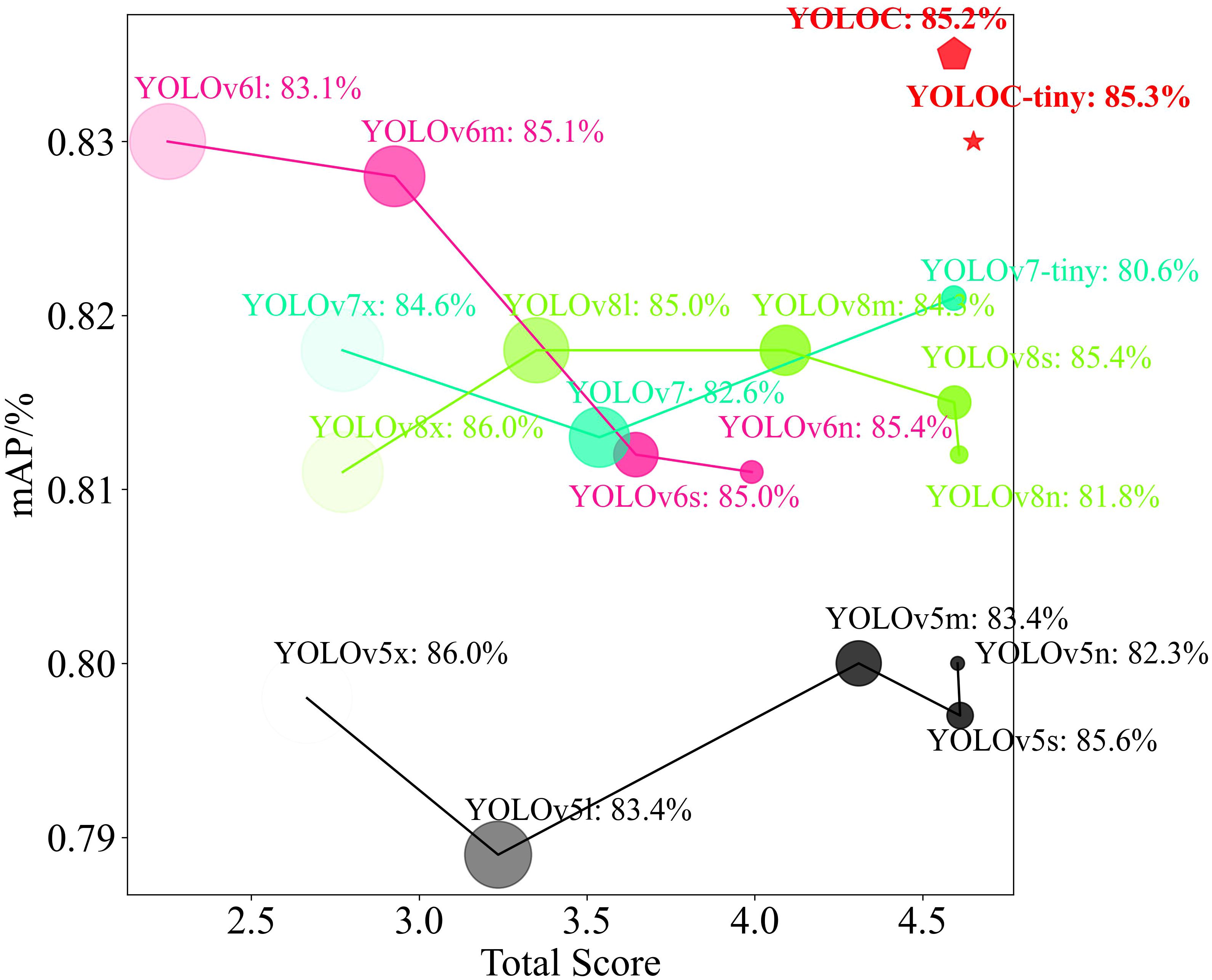
Figure 10 Detection performance charts for various SOTA models. The size of each geometric shape corresponds to the model size, with large shapes indicating large model sizes. The darkness of the geometric shape color represents the model parameter score, with dark colors indicating high parameter counts. The detection precision on the test set is provided for each model following its respective name.
We extensively validated the YOLOC and YOLOC-tiny models across multiple validation subsets, encompassing various scenarios, to address varying lighting conditions and environmental complexities. These subsets comprise the test subsets TEST-ANL and TEST-AWL for diverse lighting conditions, along with the test subsets TEST-ACE and TEST-ASE representing varying environmental complexities. Table 5 presents the average detection accuracies of different SOTA detectors on the respective test sets.
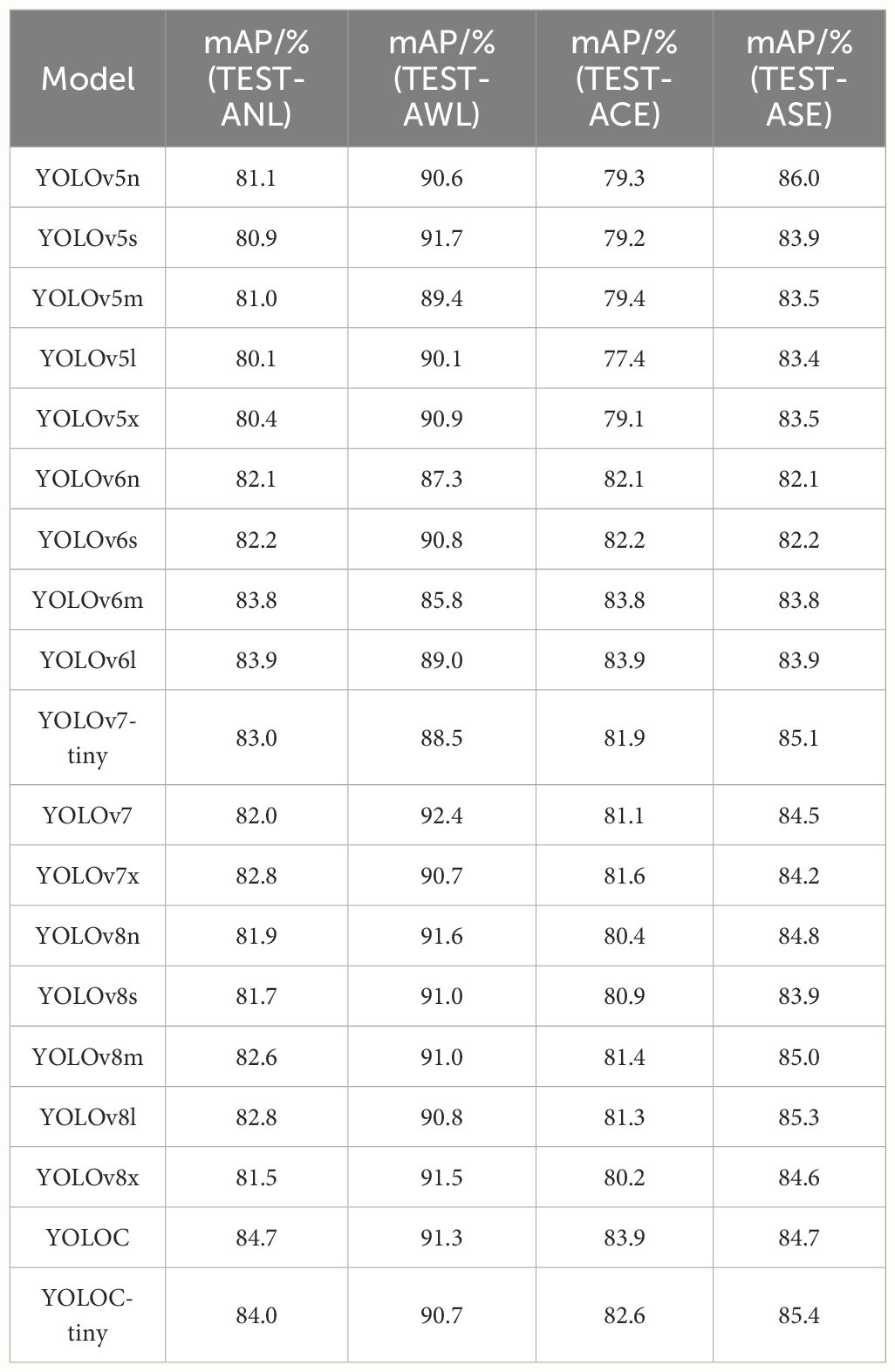
Table 5 Detection accuracy of SOTA detectors in different validation subsets.
Table 5 reveals that YOLOC-tiny exhibits notable mAP performance across all test sets, with impressive results on TEST-ANL and TEST-ACE. It achieves a substantial advantage on TEST-ANL, boasting a mAP of 84.0%, slightly below YOLOC’s 84.7%. This finding suggests that YOLOC-tiny excels in detection under regular lighting conditions. On TEST-AWL, the mAP of YOLOC-tiny is slightly lower than that of some algorithms. However, it still maintains a high level of performance. YOLOC-tiny achieves mAP scores of 85.4% and 82.6% on TEST-ASE and TEST-ACE, respectively, indicating its robustness in complex environments. These experimental results underscore the strong adaptability and practicality of YOLOC-tiny across various application scenarios.
Comparative experiments for real-world applications involving the YOLOC, YOLOC-tiny, YOLOv7, and YOLOv7-tiny models were conducted on ICPR, with deployment tests performed on PC3. The necessary software for model deployment includes onnx 1.14.0, onnxruntime-gpu 1.51.1, onnx-simplifier 0.4.33, and tensorrt 8.5.3.1. We initially exported the PyTorch models as general-purpose network models in the ONNX format. Then, we exported the ONNX model as a TensorRT model for ICPR deployment. Specific parameters, such as a confidence threshold of 0.4, an IOU threshold of 0.5, a model input image size of 640 × 640, and 32-bit floating-point precision, were set. Detection and labeling of images in the TEST-A dataset were performed on PC3 (Figure 11). Key metrics, including inference time, frame rate, detection accuracy, and the number of correctly detected citrus, were recorded. The accuracy rate was derived by sampling 29 images from the 290-image TEST-R test set for detection and manually verifying them multiple times. The detailed results are presented in Table 6.
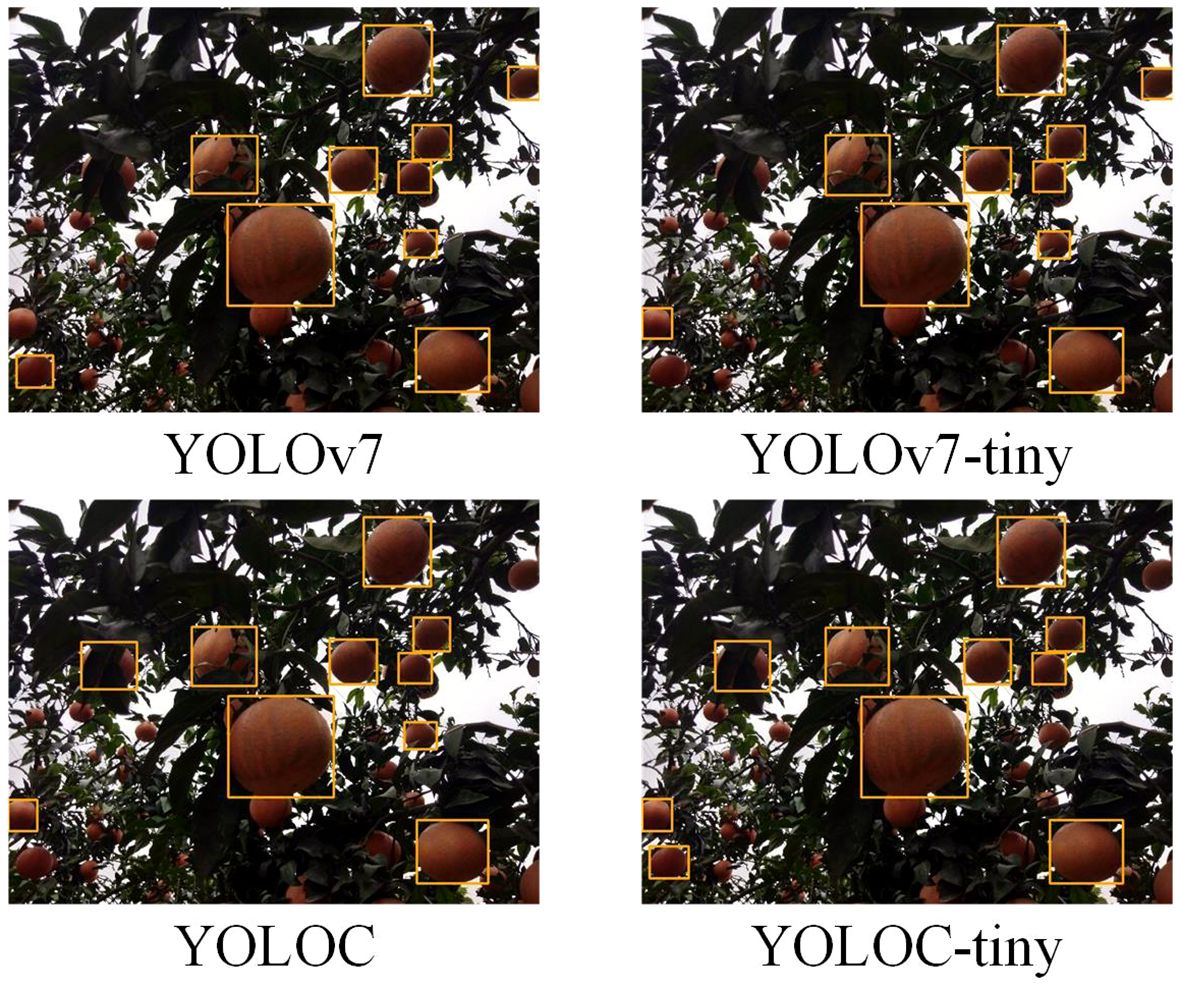
Figure 11 Detection results of various models in dark, complex environments.
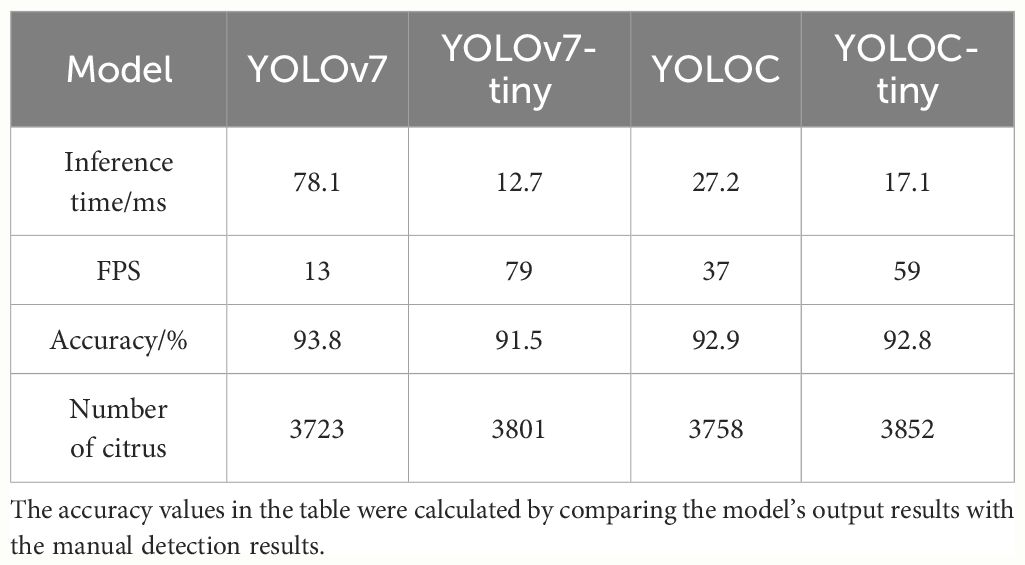
Table 6 Results of robot application experiments.
Table 6 reveals that the inference times for YOLOC and YOLOC-tiny are 27.2 and 17.1 ms, respectively. Although slightly higher than the 12.7 ms of YOLOv7-tiny, the values mentioned are significantly lower than the 78.1 ms of YOLOv7 (Figure 12A). YOLOC and YOLOC-tiny achieve frame rates exceeding the 30 FPS threshold required for the real-time detection needs of the robot, with YOLOC-tiny reaching an impressive 59 FPS. Although YOLOv7 demonstrates high detection accuracy, its FPS falls far below real-time requirements (Figure 12B). YOLOC-tiny detects 3852 citruses, outperforming the other three models (Figure 12C). This finding indicates its ability to capture targets comprehensively. Moreover, YOLOC-tiny exhibits superior real-time performance in citrus fruit detection. The detection accuracies of YOLOC and YOLOC-tiny are 92.9% and 92.8%, respectively, slightly lower than the detection accuracy of YOLOv7 (93.8%) but higher than that of YOLOv7-tiny (91.5%). This finding suggests that both models boast high detection accuracy and offer fast inference speeds and a good balance (Figure 12D). These experimental results further confirm the exceptional performance of the YOLOC series in real robotics applications.
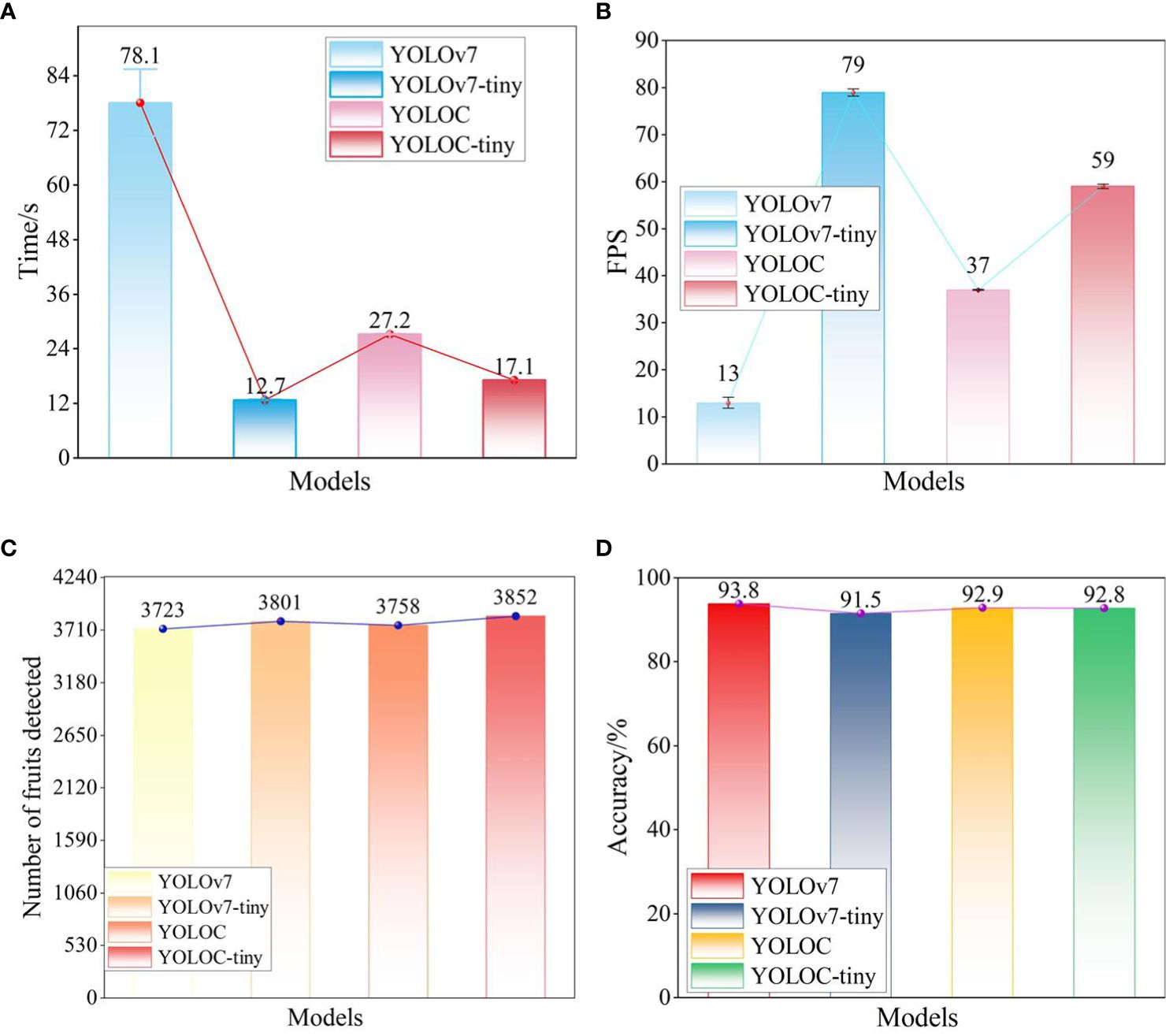
Figure 12 Detection results of different models deployed on ICPR. (A) Inference time of each model. (B) FPS of each model. (C) Number of citrus fruits detected. (D) Accuracy of each model.
Detecting and localizing fruits are crucial for the agronomic management of fruit crops, including yield prediction and automated harvesting (Fu et al., 2020a; Lu et al., 2023). Fruit harvesting operations typically account for 25% of the total production cost and 50% of the total labor force (Castro-Garcia et al., 2019). Developing lightweight, high-precision detection models suitable for deployment on robots with limited computational power can ensure operational efficiency in complex orchard environments (Liu et al., 2023; Xu et al., 2023). This also can provide stable visual information for early yield prediction and fruit thinning operations.
Although excellent algorithms for detecting ripe fruits such as citrus fruits (Xu et al., 2023), apples (Wang and He, 2021), and kiwifruit (Fu et al., 2021), and for detecting apples at different growth stages (Ma et al., 2024), have been proposed, rapid detection of multi-variety and multi-ripeness citrus fruits in complex orchards remains challenging. Additionally, balancing detection performance, speed, and model parameters on edge devices with limited computational power has yet to be achieved satisfactorily.
Based on engineering experience and experimental results, we compared and analyzed various SOTA object detectors. We selected YOLOv7 as the base network and implemented a series of optimizations and improvements, including using a lightweight backbone network and embedding the attention mechanism CBAM. We also designed metrics to comprehensively evaluate the model’s detection performance on edge devices with limited computational power (see Equations 11–14). Consequently, we proposed the lightweight detection model YOLOC-tiny.
While YOLOC-tiny demonstrated excellent detection performance in tasks involving multi-variety and multiripeness non-green-ripe citrus fruits, several limitations remain. First, as shown in Figure 9 of the revised manuscript, the model’s detection capability for citrus fruits that are either distant or severely occluded is insufficient. Although these fruits can be detected as the robot moves, detecting small, distant citrus fruits and severely occluded citrus fruits requires further attention. Second, in distinguishing between different citrus varieties and maturities, YOLOC-tiny’s detection accuracy is lower compared to algorithms that detect single-variety, single-maturity fruits (Fu et al., 2019; Apolo-Apolo et al., 2020a). As shown in Table 5, the mAP of YOLOC-tiny is slightly lower than that of YOLOv5n in simple environments, although YOLOC-tiny outperforms YOLOv5n in complex orchards and varying lighting conditions.
Moreover, in this study, we only verified the impact of adding pure citrus image datasets on enhancing the detection performance of citrus fruits in unstructured environments, without conducting quantitative and qualitative research. Considering the basic conditions of the robot’s operating environment, we used only seven data augmentation methods. Furthermore, transformers have proven effective in large language models and have recently been applied to object detection tasks, suggesting promising avenues for improving model performance (Zhu et al., 2022; Yang et al., 2023). We also note the recent advancements with YOLOv9 and YOLOv10.
We will further expand the dataset, enrich the images with various scenes and lighting conditions, or increase the image resolution. We will explore the effectiveness of generative adversarial networks and MixUp in robot applications in future research. Therefore, future work will focus on enriching the dataset and incorporating more efficient network architectures and modules to further enhance the model’s detection performance and lightweight characteristics. In our future research, we plan to optimize the model structure further to improve the detection performance of citrus fruits in low-light environments.
To address these issues, we will expand the dataset, enhance image diversity with various scenes and lighting conditions, and increase the image resolution (Wang et al., 2022b). Additionally, we will explore the effectiveness of generative adversarial networks and MixUp in dataset augmentation. Future work will focus on incorporating more efficient network architectures and modules to enhance the model’s detection performance and lightweight characteristics. We also plan to optimize the model structure to improve the detection of citrus fruits in low-light environments.
We introduce a generalized lightweight detection model, YOLOC-tiny, tailored for large non-green-ripe citrus of different varieties with multiripeness in complex environments by optimizing the network structure and reducing the model size to enhance computational efficiency. Our methodology begins with the curation of image datasets featuring citrus fruits in various environments and ripeness stages, encompassing navel orange, Ehime Jelly orange, and Harumi tangerine. YOLOC-tiny utilizes the EfficientNet-B0 feature extraction backbone, streamlining model parameters whilst augmenting feature extraction capabilities. Furthermore, it integrates a spatial and channel hybrid attention mechanism, CBAM, to enhance access to contextual information, intensify focus on diverse citrus fruits, and achieve superior detection performance. Additional parameter reduction is achieved by implementing the LAMP strategy.
The key findings from our study include the following: (1) Ablation experiments confirm the effectiveness of our enhancement measures in improving network performance for non-green-ripe citrus fruit detection. (2) Compared with TRAIN-A, YOLOv7 based on the F-TRAIN-A dataset exhibits a 2.4% and 0.8% improvement in P and mAP, respectively. This finding validates the benefit of replacing citrus images in real scenes with a small number of pure citrus images in complex environments to enhance model detection performance. (3) Compared with other SOTA models, such as YOLOv8, YOLOC-tiny surpasses real-time detection requirements with an impressive frame rate. It also demonstrates superior detection performance. YOLOC-tiny achieves an 85.3% P and an 83.0% mAP at a frame rate of 80 FPS, with a parametric count of merely 4.2 M. (4) In a real-world deployment with a citrus-picking robot, ICPR, YOLOC-tiny attains 92.8% accuracy at a frame rate of 59. Thus, YOLOC-tiny provides real-time, accurate information on multiripeness and diverse citrus fruits for orchard robots.
The original contributions presented in the study are included in the article/Supplementary Material. Further inquiries can be directed to the corresponding author.
ZT: Funding acquisition, Resources, Writing – original draft, Writing – review & editing, Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Project administration, Software, Supervision, Validation, Visualization. LX: Conceptualization, Data curation, Formal analysis, Funding acquisition, Investigation, Methodology, Project administration, Resources, Supervision, Writing – review & editing. HL: Data curation, Formal analysis, Software, Validation, Visualization, Writing – review & editing. MC: Conceptualization, Data curation, Funding acquisition, Supervision, Validation, Writing – review & editing. XS: Conceptualization, Data curation, Formal analysis, Investigation, Methodology, Software, Validation, Writing – review & editing. LZ: Data curation, Validation, Writing – review & editing, Methodology, Software. YW: Conceptualization, Data curation, Funding acquisition, Writing – review & editing. ZW: Funding acquisition, Methodology, Resources, Writing – review & editing. YZ: Data curation, Formal analysis, Resources, Writing – review & editing. KR: Software, Validation, Writing – review & editing. YH: Funding acquisition, Resources, Writing – review & editing. WM: Funding acquisition, Resources, Writing – review & editing. NY: Funding acquisition, Resources, Writing – review & editing. LL: Funding acquisition, Resources, Writing – review & editing. YQ: Funding acquisition, Supervision, Writing – review & editing.
The author(s) declare financial support was received for the research, authorship, and/or publication of this article. This study was founded by the National Natural Science Foundation of China (Grant No.32301704 and Grant No.32171909), the Department of Science and Technology of Sichuan province (Grant No. 2021JDRC0091 and Grant No. 22ZDYF0095), and the Sichuan Smart Agricultural Engineering Technology Research Centre.
We acknowledge the students who contributed to labeling raw non-green-ripe images for this research project, as well as the student and the EnPapers editors for their dedication to refining our research paper in impeccable English. We also extend our appreciation to the journal reviewers for their valuable contributions towards improving the paper.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
The Supplementary Material for this article can be found online at: https://www.frontiersin.org/articles/10.3389/fpls.2024.1415006/full#supplementary-material
Supplementary Figure 1 | The MBConv convolutional network.
Supplementary Figure 2 | Diagram of LAMP for PL-YOLO-tiny.
Supplementary Table 1 | Details of citrus fruit image datasets.
Supplementary Table 2 | Overview of the dataset and the number of images used in this study.
Apolo-Apolo, O. E., Martínez-Guanter, J., Egea, G., Raja, P., Pérez-Ruiz, M. (2020a). Deep learning techniques for estimation of the yield and size of citrus fruits using a UAV. Eur. J. Agron. 115, 126030. doi: 10.1016/j.eja.2020.126030
Apolo-Apolo, O. E., Pérez-Ruiz, M., Martínez-Guanter, J., Valente, J. (2020b). A cloud-based environment for generating yield estimation maps from apple orchards using UAV imagery and a deep learning technique. Front. Plant Sci. 11. doi: 10.3389/fpls.2020.01086
Bargoti, S., Underwood, J. P. (2017). Image segmentation for fruit detection and yield estimation in apple orchards. J. Field Robotics 34, 1039–1060. doi: 10.1002/rob.21699
Castro-Garcia, S., Aragon-Rodriguez, F., Sola-Guirado, R. R., Serrano, A. J., Soria-Olivas, E., Gil-Ribes, J. A. (2019). Vibration monitoring of the mechanical harvesting of citrus to improve fruit detachment efficiency. Sensors 19, 1760. doi: 10.3390/s19081760
Chen, M., Tang, Y., Zou, X., Huang, K., Huang, Z., Zhou, H., et al. (2020). Three-dimensional perception of orchard banana central stock enhanced by adaptive multi-vision technology. Comput. Electron. Agric. 174, 105508. doi: 10.1016/j.compag.2020.105508
Condotta, I. C. F. S., Brown-Brandl, T. M., Pitla, S. K., Stinn, J. P., Silva-Miranda, K. O. (2020). Evaluation of low-cost depth cameras for agricultural applications. Comput. Electron. Agric. 173, 105394. doi: 10.1016/j.compag.2020.105394
Fu, L., Feng, Y., Tola, E., Liu, Z., Li, R., Cui, Y. (2018). Image recognition method of multi-cluster kiwifruit in field based on convolutional neural networks. Trans. Chin. Soc. Agric. Eng. 34, 205–211. doi: 10.11975/j.issn.1002-6819.2018.02.028
Fu, L., Feng, Y., Wu, J., Liu, Z., Gao, F., Majeed, Y., et al. (2021). Fast and accurate detection of kiwifruit in orchard using improved YOLOv3-tiny model. Precis. Agric. 22, 754–776. doi: 10.1007/s11119-020-09754-y
Fu, L., Gao, F., Wu, J., Li, R., Karkee, M., Zhang, Q. (2020a). Application of consumer RGB-D cameras for fruit detection and localization in field: A critical review. Comput. Electron. Agric. 177, 105687. doi: 10.1016/j.compag.2020.105687
Fu, L., Majeed, Y., Zhang, X., Karkee, M., Zhang, Q. (2020b). Faster R–CNN–based apple detection in dense-foliage fruiting-wall trees using RGB and depth features for robotic harvesting. Biosyst. Eng. 197, 245–256. doi: 10.1016/j.biosystemseng.2020.07.007
Fu, L., Tola, E., Al-Mallahi, A., Li, R., Cui, Y. (2019). A novel image processing algorithm to separate linearly clustered kiwifruits. Biosyst. Eng. 183, 184–195. doi: 10.1016/j.biosystemseng.2019.04.024
Gené-Mola, J., Sanz-Cortiella, R., Rosell-Polo, J. R., Morros, J.-R., Ruiz-Hidalgo, J., Vilaplana, V., et al. (2020). Fruit detection and 3D location using instance segmentation neural networks and structure-from-motion photogrammetry. Comput. Electron. Agric. 169, 105165. doi: 10.1016/j.compag.2019.105165
Girshick, R., Donahue, J., Darrell, T., Malik, J. (2014). Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. Available online at: https://openaccess.thecvf.com/content_cvpr_2014/html/Girshick_Rich_Feature_Hierarchies_2014_CVPR_paper.html (Accessed May 20, 2024).
Huang, Y., Ren, Z., Li, D., Liu, X. (2020). Phenotypic techniques and applications in fruit trees: a review. Plant Methods 16, 107. doi: 10.1186/s13007-020-00649-7
Lan, Y., Huang, Z., Deng, X., Zhu, Z., Huang, H., Zheng, Z., et al. (2020). Comparison of machine learning methods for citrus greening detection on UAV multispectral images. Comput. Electron. Agric. 171, 105234. doi: 10.1016/j.compag.2020.105234
Liu, C., Feng, Q., Sun, Y., Li, Y., Ru, M., Xu, L. (2023). YOLACTFusion: An instance segmentation method for RGB-NIR multimodal image fusion based on an attention mechanism. Comput. Electron. Agric. 213, 108186. doi: 10.1016/j.compag.2023.108186
Liu, T.-H., Ehsani, R., Toudeshki, A., Zou, X.-J., Wang, H.-J. (2018). Detection of citrus fruit and tree trunks in natural environments using a multi-elliptical boundary model. Comput. Industry 99, 9–16. doi: 10.1016/j.compind.2018.03.007
Liu, Y., Heying, E., Tanumihardjo, S. A. (2012). History, global distribution, and nutritional importance of citrus fruits. Compr. Rev. Food Sci. Food Saf. 11, 530–545. doi: 10.1111/j.1541-4337.2012.00201.x
Lu, J., Chen, P., Yu, C., Lan, Y., Yu, L., Yang, R., et al. (2023). Lightweight green citrus fruit detection method for practical environmental applications. Comput. Electron. Agric. 215, 108205. doi: 10.1016/j.compag.2023.108205
Lu, J., Lee, W. S., Gan, H., Hu, X. (2018). Immature citrus fruit detection based on local binary pattern feature and hierarchical contour analysis. Biosyst. Eng. 171, 78–90. doi: 10.1016/j.biosystemseng.2018.04.009
Lu, S., Chen, W., Zhang, X., Karkee, M. (2022). Canopy-attention-YOLOv4-based immature/mature apple fruit detection on dense-foliage tree architectures for early crop load estimation. Comput. Electron. Agric. 193, 106696. doi: 10.1016/j.compag.2022.106696
Ma, B., Hua, Z., Wen, Y., Deng, H., Zhao, Y., Pu, L., et al. (2024). Using an improved lightweight YOLOv8 model for real-time detection of multi-stage apple fruit in complex orchard environments. Artif. Intell. Agric. 11, 70–82. doi: 10.1016/j.aiia.2024.02.001
Maheswari, P., Raja, P., Apolo-Apolo, O. E., Pérez-Ruiz, M. (2021). Intelligent fruit yield estimation for orchards using deep learning based semantic segmentation techniques—A review. Front. Plant Sci. 12. doi: 10.3389/fpls.2021.684328
Redmon, J., Divvala, S., Girshick, R., Farhadi, A. (2016). “You only look once: unified, real-time object detection,” in 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). (Las Vegas, NV, USA: IEEE), 779–788. doi: 10.1109/CVPR.2016.91
Shaoqing, R., He, K., Girshick, R., Sun, J. (2016). Faster R-CNN: towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 39, 1137–1149. doi: 10.1109/TPAMI.2016.2577031
Tang, Y., Chen, M., Wang, C., Luo, L., Li, J., Lian, G., et al. (2020). Recognition and localization methods for vision-based fruit picking robots: A review. Front. Plant Sci. 11. doi: 10.3389/fpls.2020.00510
The United States Department of Agriculture (2024). Citrus: World Markets and Trade. Available online at: https://apps.fas.usda.gov/psdonline/circulars/citrus.pdf (Accessed June 9, 2024).
Tzutalin (2015). LabelImg. Git code, (2015). Available online at: https://github.com/tzutalin/labelImg.
Wang, C.-Y., Bochkovskiy, A., Liao, H.-Y. M. (2022a). YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. Available online at: http://arxiv.org/abs/2207.02696. doi: 10.1109/CVPR52729.2023.00721
Wang, D., He, D. (2021). Channel pruned YOLO V5s-based deep learning approach for rapid and accurate apple fruitlet detection before fruit thinning. Biosyst. Eng. 210, 271–281. doi: 10.1016/j.biosystemseng.2021.08.015
Wang, X., Tang, J., Whitty, M. (2022b). Data-centric analysis of on-tree fruit detection: Experiments with deep learning. Comput. Electron. Agric. 194, 106748. doi: 10.1016/j.compag.2022.106748
Wang, Y., Yan, G., Meng, Q., Yao, T., Han, J., Zhang, B. (2022c). DSE-YOLO: Detail semantics enhancement YOLO for multi-stage strawberry detection. Comput. Electron. Agric. 198, 107057. doi: 10.1016/j.compag.2022.107057
Wei, L., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu, C.-Y., et al. (2016). “SSD: Single Shot MultiBox Detector,” in Computer Vision – ECCV 2016. Eds. Leibe, B., Matas, J., Sebe, N., Welling, M. (Springer International Publishing, Cham), 21–37. doi: 10.1007/978-3-319-46448-0_2
Xu, L., Wang, Y., Shi, X., Tang, Z., Chen, X., Wang, Y., et al. (2023). Real-time and accurate detection of citrus in complex scenes based on HPL-YOLOv4. Comput. Electron. Agric. 205, 107590. doi: 10.1016/j.compag.2022.107590
Yang, C. H., Xiong, L. Y., Wang, Z., Wang, Y., Shi, G., Kuremot, T., et al. (2020). Integrated detection of citrus fruits and branches using a convolutional neural network. Comput. Electron. Agric. 174, 105469. doi: 10.1016/j.compag.2020.105469
Yang, S., Wang, W., Gao, S., Deng, Z. (2023). Strawberry ripeness detection based on YOLOv8 algorithm fused with LW-Swin Transformer. Comput. Electron. Agric. 215, 108360. doi: 10.1016/j.compag.2023.108360
Yu, J., Wu, T., Zhang, X., Zhang, W. (2022). An efficient lightweight SAR ship target detection network with improved regression loss function and enhanced feature information expression. Sensors 22, 3447. doi: 10.3390/s22093447
Yu, Y., Zhang, K., Yang, L., Zhang, D. (2019). Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 163, 104846. doi: 10.1016/j.compag.2019.06.001
Zheng, Z., Wang, P., Liu, W., Li, J., Ye, R., Ren, D. (2020). “Distance-ioU loss: faster and better learning for bounding box regression,” in Proceedings of the AAAI Conference on Artificial Intelligence, Vol. 34. Palo Alto, California, USA: Association for the Advancement of Artificial Intelligence (AAAI), 12993–13000. doi: 10.1609/aaai.v34i07.6999
Zhu, J., Yang, G., Feng, X., Li, X., Fang, H., Zhang, J., et al. (2022). Detecting wheat heads from UAV low-altitude remote sensing images using deep learning based on transformer. Remote Sens. 14, 5141. doi: 10.3390/rs14205141
Keywords: non-green-ripe citrus, multiripeness fruits, YOLOv7, EfficientNet, CBAM, agricultural robot
Citation: Tang Z, Xu L, Li H, Chen M, Shi X, Zhou L, Wang Y, Wu Z, Zhao Y, Ruan K, He Y, Ma W, Yang N, Luo L and Qiu Y (2024) YOLOC-tiny: a generalized lightweight real-time detection model for multiripeness fruits of large non-green-ripe citrus in unstructured environments. Front. Plant Sci. 15:1415006. doi: 10.3389/fpls.2024.1415006
Received: 09 April 2024; Accepted: 18 June 2024;
Published: 05 July 2024.
Edited by:
Mohsen Yoosefzadeh Najafabadi, University of Guelph, CanadaReviewed by:
Orly Enrique Apolo-Apolo, KU Leuven, BelgiumCopyright © 2024 Tang, Xu, Li, Chen, Shi, Zhou, Wang, Wu, Zhao, Ruan, He, Ma, Yang, Luo and Qiu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Lijia Xu, eHVsaWppYUBzaWNhdS5lZHUuY24=
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.