
95% of researchers rate our articles as excellent or good
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.
Find out more
REVIEW article
Front. Plant Sci. , 26 July 2023
Sec. Technical Advances in Plant Science
Volume 14 - 2023 | https://doi.org/10.3389/fpls.2023.1214006
This article is part of the Research Topic Remote Sensing for Field-based Crop Phenotyping View all 18 articles
 Yongxin Lin1,2
Yongxin Lin1,2 Shuang Li1Shaoguang Duan1Yanran Ye1
Shuang Li1Shaoguang Duan1Yanran Ye1 Bo Li3
Bo Li3 Guangcun Li1Dianqiu Lyv2
Guangcun Li1Dianqiu Lyv2 Liping Jin1Chunsong Bian1*
Liping Jin1Chunsong Bian1* Jiangang Liu1*
Jiangang Liu1*Timely and accurate prediction of crop yield is essential for increasing crop production, estimating planting insurance, and improving trade benefits. Potato (Solanum tuberosum L.) is a staple food in many parts of the world and improving its yield is necessary to ensure food security and promote related industries. We conducted a comprehensive literature survey to demonstrate methodological evolution of predicting potato yield. Publications on predicting potato yield based on methods of remote sensing (RS), crop growth model (CGM), and yield limiting factor (LF) were reviewed. RS, especially satellite-based RS, is crucial in potato yield prediction and decision support over large farm areas. In contrast, CGM are often utilized to optimize management measures and address climate change. Currently, combined with the advantages of low cost and easy operation, unmanned aerial vehicle (UAV) RS combined with artificial intelligence (AI) show superior potential for predicting potato yield in precision management of large-scale farms. However, studies on potato yield prediction are still limited in the number of varieties and field sample size. In the future, it is critical to employ time-series data from multiple sources for a wider range of varieties and large field sample sizes. This study aims to provide a comprehensive review of the progress in potato yield prediction studies and to provide a theoretical reference for related research on potato.
Global food security is encountering significant challenges from climate change and increasing resource competition (Godfray et al., 2010). Potato (Solanum tuberosum L.), a tuberous crop, is cultivated worldwide due to its stable and high yield, wide adaptability, and complete nutritional composition. Furthermore, it is a pivotal crop for realizing the United Nations (UN) Sustainable Development Goals (SDGs). Yield of potato and other crops is determined interactively by genotype (G), environment (E), and management practices (M) (Cooper et al., 2021). Analysis and modeling of key parameters can effectively predict crop yield, providing crucial guidance and decision support for various stakeholders, such as farmers, policy makers, and agribusinesses. In addition, these predictions substantially impact optimizing planting structure, optimizing trading policies, allocating resources efficiently, and conducting precision management.
There have been significant strides in both theoretical and practical aspects of predicting potato yield. Early on, such prediction relied on field sampling, whereby the number and weight of potatoes per unit area were measured to calculate the yield (Dyke and Avis, 1953). Other agronomic traits in subsequent studies, including petiole potassium content (Holm and Nylund, 1978), also served as useful indicators for potato yield. Nevertheless, these destructive methods require substantial labor for field sampling and do not provide complete spatial or temporal coverage.
Remote sensing (RS) has emerged as a popular tool in crop phenotyping (Araus and Cairns, 2014), growth monitoring (Liu et al., 2021), and yield prediction (Ma et al., 2021), attributed to it being non-destructive, high-throughput, and having large spatial coverage. In 1974, the Large Area Crop Inventory Experiment (LACIE) program, which showed the possibility of RS for yield prediction for the first time, was used to assess wheat acreage in the United States, Canada, and the former Soviet Union combined with Landsat (MacDonald et al., 1975). In 1977, the LACIE accurately predicted a declining trend in spring wheat production in the Soviet Union with precision of 90% leading to a positive impact on the United States economy (Hill et al., 1980). From 1980 to 1986, multiple departments involved in the LACIE program collaborated in the Agriculture and Resources Inventory Surveys Through Aerospace Remote Sensing (AgRISTARS) initiative (Doraiswamy et al., 1979). This effort aimed to predict yield for eight crops (not including potato) within the United States and other countries worldwide. Satellite-based potato yield prediction commenced later in the 1980s. Potato acreage was estimated to predict production in Canada by Landsat (Ryerson et al., 1985). In 1987, the European Union proposed the Monitoring Agricultural Resources (MARS) project, which utilized satellite and aerial imagery to continuously monitor the planting area and growth status of several staple crops including potatoes (Van der Velde and Nisini, 2019). It also provided timely prediction results of crop yields for the European Union.
Although satellites have the advantage of covering large areas of farmland, they are greatly affected by the revisit interval and low resolution. To address the growing demand for site-specific crop monitoring and yield prediction among farmers, research into proximal RS technologies such as unmanned aerial vehicle (UAV) and ground-based RS has increased rapidly. In contrast to satellites, UAVs possess tremendous potential for site-specific phenotype acquisition, yield prediction, and precision management, which is attributed to their low cost, convenience, and high spatial resolution (Yang G. et al., 2017). Additionally, ground-based methods are increasingly being utilized for more detailed phenotypic analyses in a variety of specific scenarios. In general, RS is capable of rapidly monitoring fields without damaging them. However, it employs empirical modeling methods most of which lack a robust mechanism.
Crop growth model (CGM) aim to describe the process of potato development before harvest. POTATO (Ng and Loomis, 1984) is the first CGM for potato with a complete mechanism. Between the 1990s and early 2000s, potato CGM became more comprehensive with the incorporation of additional parameters, such as water and nitrogen modules (Tang et al., 2021). During this period, various models were developed, including DSSAT-SUBSTOR (Ritchie et al., 1995) and LINTUL-NPOTATO (Van Delden et al., 2003). Although these models are mechanistic and have high precision, they require a substantial number of input parameters. Furthermore, the calibration and validation of these models rely on ground-truth data, which can be laborious to acquire.
During the 2010s, sensor technology, machine learning (ML), digital image analysis, and data mining techniques developed rapidly. Additionally, mechanisms underlying potato growth and development, yield quality formation principles, and interactions between crop-environment-management measures were better understood, encouraging improvement in theories of potato yield prediction.
Yield prediction requires multidisciplinary knowledge at the intersection of agronomy, meteorology, statistics, economics, and computer science. Several studies have reviewed the advancements made in yield prediction for diverse crops such as rice (dela Torre et al., 2021) and maize (Tandzi and Mutengwa, 2020). In contrast, yield prediction for potato differs from other major crops because its edible part is located belowground. Currently, there is no comprehensive literature survey of potato yield prediction due to complex model types and application scenarios. To tackle these issues, this paper provides an overview of the advancements in and prospects for potato yield prediction. First, we present a summary of the commonly used methodologies and compare them. Second, after thoroughly evaluating the existing methods, we envision the future development of potato yield prediction. This review comprehensively evaluates the progress made in potato yield prediction and provides the corresponding theoretical references.
A total of 276 articles including the keywords “potato”, “yield or production or output”, and “estimat* or forecast* or predict* or simulat*” were identified in the Web of Science™ database (Clarivate Analytics) through January 11, 2023. To encompass a broader scope of relevant studies, we also conducted a literature survey with the abovementioned keywords on the Scopus database and retrieved 152 publications. After eliminating duplicates and irrelevant studies, 160 publications were included in this study. As depicted in Figure 1A, the number of pertinent studies has progressively increased since the 2010s. Furthermore, Figure 1B demonstrates a growing number of annual citations for these publications, indicating increased interest in this research domain.
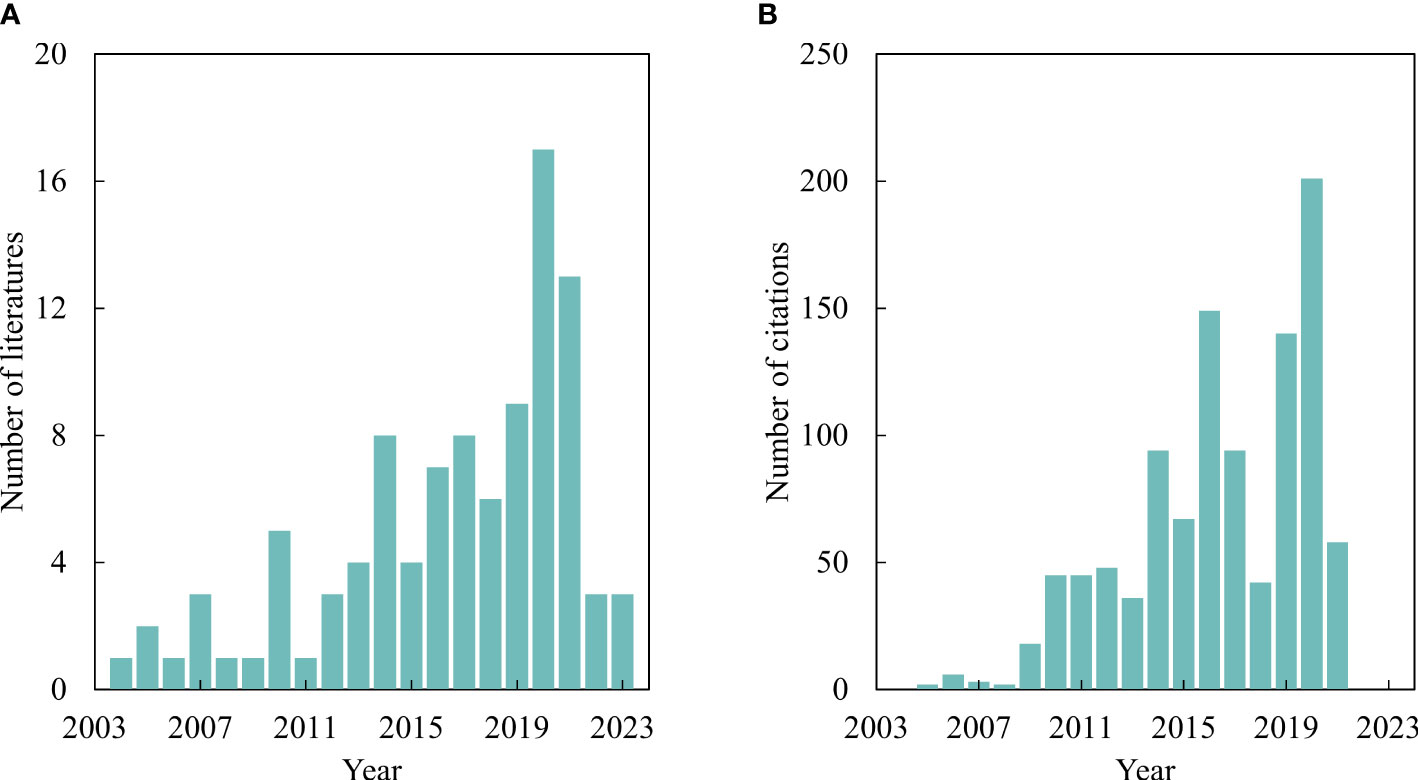
Figure 1 Literature counts (A) and citations (B) for potato yield production since 2003 to 2023.
Through literature review, we classified studies on potato yield prediction into three categories including methods based on RS, CGM, and yield limiting factor (LF). Methods with LF include those based on agronomic and environmental parameters. Figure 2 displays the numbers of the three approaches in potato yield prediction studies over the past 50 years. Initially, RS and CGM were less used for potato yield prediction. CGM-based methods have a long history with the key period of research and development occurring in the 1980s and 1990s. Since the 21st century, CGM have been widely applied, with research efforts focused on the parameterization of models under various conditions. The CO2 response module is integrated with climate models to assess the impact of climate change on future yields. With the development of advanced information technology, RS-based methods have emerged in the study of crop yield prediction, utilizing next-generation sensors, UAVs, and ML algorithms. For instance, in 2020, there were 17 publications relating to potato yield prediction, of which ten were dedicated to RS-based methods. These publications contain RS-based yield prediction at multiple carrying platforms for sensors, ranging from satellites and aerial, to ground-based methods (Figure 3), achieving site-specific yield prediction across multiple spatial scales. Finally, to facilitate comprehension of readers, we have produced a nomenclature (Table 1).
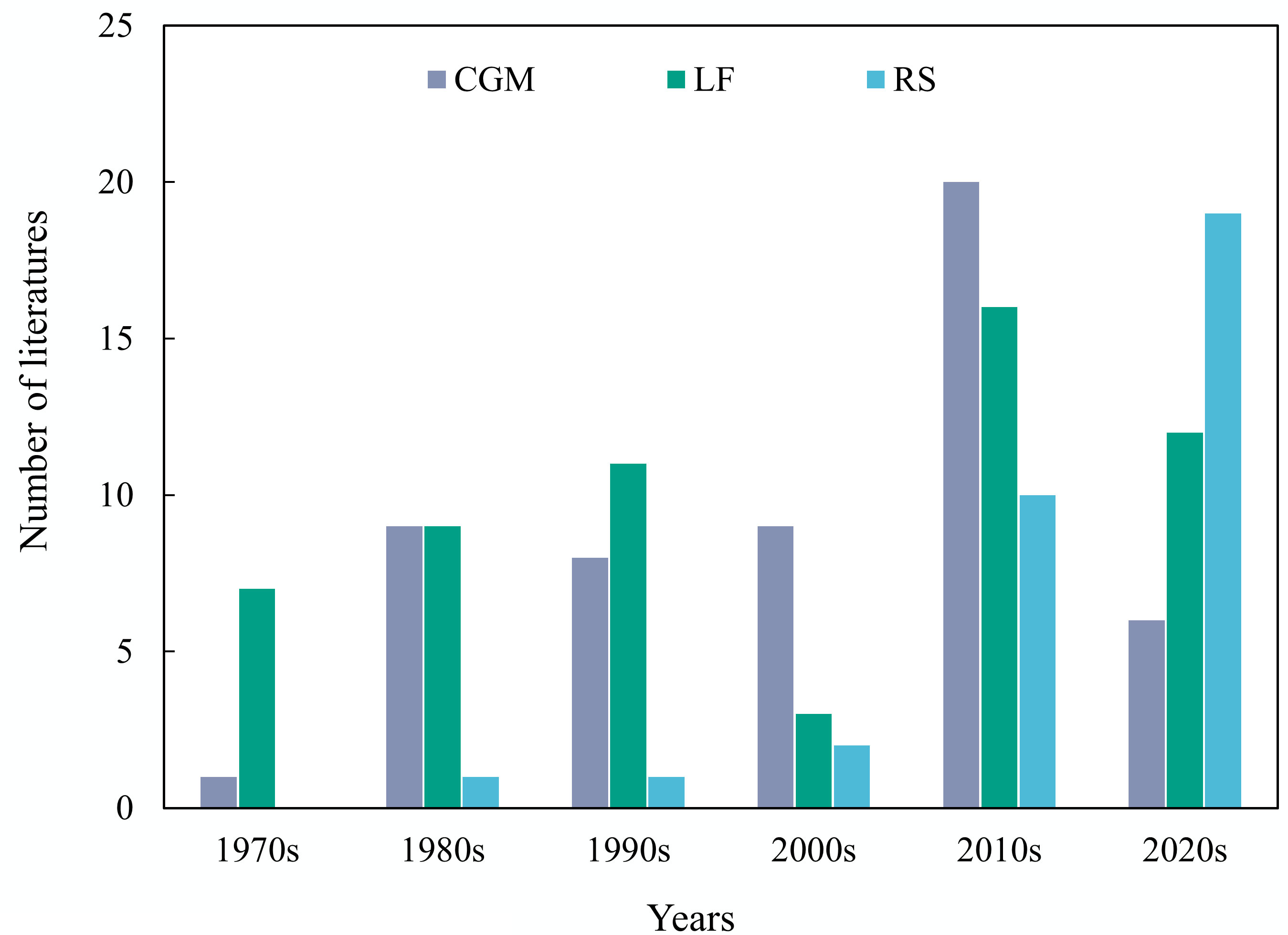
Figure 2 Distribution of strategies for potato yield prediction using CGM, RS, and LF-based methods since 1970s to 2020s.
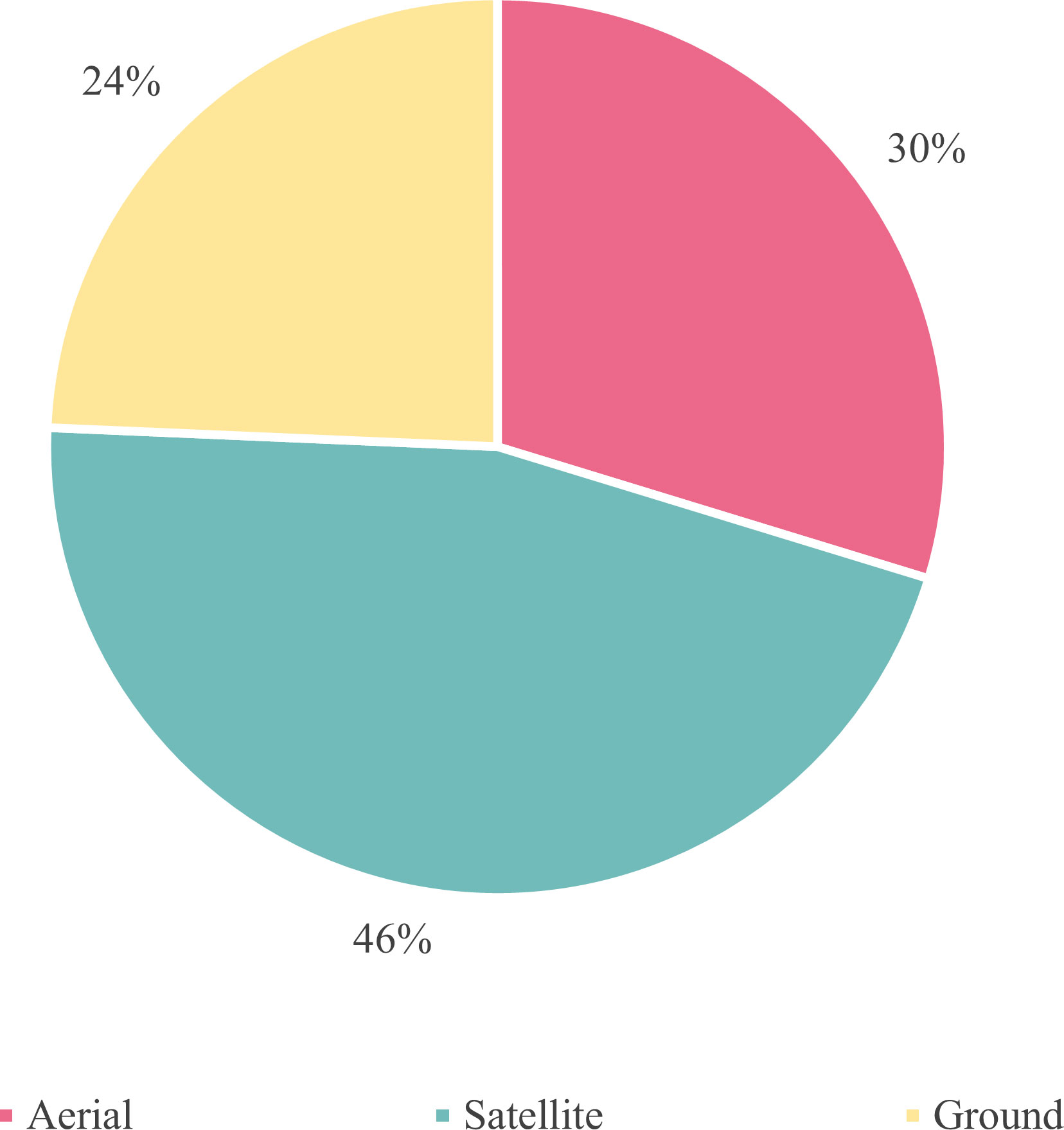
Figure 3 Distribution of RS Platforms adopted for potato yield prediction.
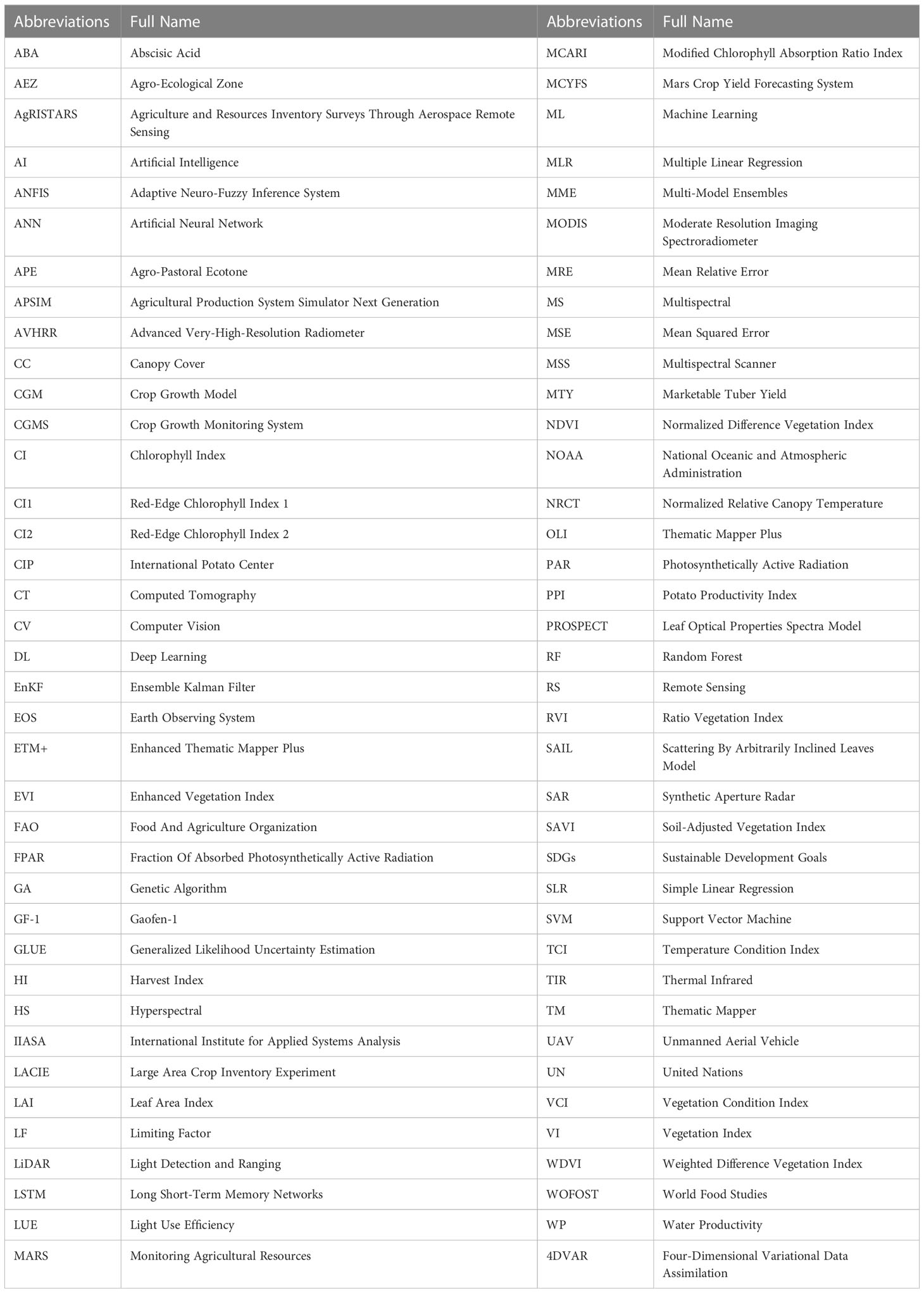
Table 1 Nomenclature: abbreviations and corresponding full names.
Agricultural RS was primarily applied in the resource survey, and in crop growth monitoring, yield prediction, disaster estimation, and loss assessment (Weiss et al., 2020). The LACIE program in the 1970s was representative of RS-based yield prediction in other crops; related applications in potatoes have been relatively delayed. In the 1980s, researchers employed satellite imagery to estimate potato acreage and combined it with yield data to estimate production (Ryerson et al., 1985). Nonetheless, during this period, yield data were still obtained through interviewing farmers, rather than direct evaluation of RS imagery. In 1992, potato yield was estimated by combining process-based crop models with leaf area index (LAI) data collected by handheld multispectral sensors (Finke, 1992). However, the spatial coverage of the handheld instruments was incomplete, which made it challenging to capture the yield variability of the entire field. In the early 21st century, several studies were conducted using non-destructive and convenient UAVs and satellites, which provided more comprehensive spatial coverage, for potato yield estimation (Yokobori et al., 2004; Bala and Islam, 2009). Currently, the technology for RS-based potato yield prediction has significantly advanced with the emergence of new-generation platforms, sensors, and advanced algorithms.
In this section RS-based yield prediction methods were reviewed from three perspectives: the acquisition of RS information, the selection of modeling parameters and the evolution of yield prediction models.
The RS system is comprised of a platform and integrated sensors. Different types of RS platforms offer unique benefits for specific application scenarios. According to the type of platform, we divided the potato yield prediction method based on RS into satellite-based, aerial-based, and ground-based methods for evaluation.
Primarily, satellites equipped with spectral sensors can obtain ground vegetation spectral information over large areas for the purposes of land resource surveying, crop growth monitoring, and yield prediction (Nakalembe et al., 2021). Since 1972, satellites such as the Landsat-1, which is equipped with a Multispectral Scanner (MSS) containing four spectral bands, have been successfully launched. As a result, humanity began monitoring global resources and environmental factors on a large scale. Landsat imagery was used to estimate potato acreage by Statistics Canada in New Brunswick from 1980 to1982. They found that potato acreage could be estimated accurately using Landsat images, with a coefficient of variation of around 5.5% (Ryerson et al., 1985). A series of weather observation satellites, such as NOAA-6 with the Advanced Very-High-Resolution Radiometer (AVHRR), has been operated by the National Oceanic and Atmospheric Administration (NOAA) since 1979. These satellites have provided an ample amount of RS imagery for accurate potato yield prediction (Akhand et al., 2016).
Even the revisit time of NOAA satellites equipped with AVHRR sensors is 12 hours, the spatial resolution is only 1.1 km. In 1999, the Earth Observing System (EOS) program launched Terra, which carries five specially designed sensors for monitoring environmental and climate change. Terra carries a Moderate Resolution Imaging Spectroradiometer (MODIS) capable of receiving spectral information of 36 bands between 0.4 and 14.4 μm with a spatial resolution of 250-1000 m. The potato yield was estimated using Normalized Difference Vegetation Index (NDVI), LAI, and Fraction of Absorbed Photosynthetically Active Radiation (FPAR) extracted from Terra-MODIS with an average error rate at 15% compared with actual yield by Bala and Islam (2009).
Despite significant enhancements in the resolution of MODIS imaging sensor compared with the NOAA satellites, the mixed image components comprising of different objects such as soil and potato canopy remain challenging to be discriminated. Low-resolution satellite imaging encounters the obstacle in estimating potato yields in relatively smaller regions. Landsat 4 and subsequent satellites equipped with Thematic Mapper (TM), Enhanced Thematic Mapper Plus (ETM+), or Operational Land Imager (OLI), featuring a spatial resolution from 30 to 120 meters. The ongoing Landsat 8 and Landsat 9 observation missions each offer a revisit cycle of around 16 days. The joint utilization of both satellites has the potential to halve the revisit period to 8 days. Similarly, the Sentinel-2 of Copernicus Programme captures images of the same region every 10 days with a high spatial resolution ranging from 10 to 60 meters. Furthermore, the successful integration of Sentinel-2A and Sentinel-2B has the capability to reduce the revisit interval to a mere 5 days.
Satellites with greater spatial resolution and shorter revisit cycles showed better potential in predicting potato yield. Al-Gaadi et al. (2016) compared the accuracy of yield estimation for potato using Landsat-8 and Sentinel-2. Landsat-8 exhibited a range of prediction errors, ranging from 7.9% to 13.5%, along with R2 values ranging from 0.39 to 0.65 at different sites. In contrast, Sentinel-2 demonstrated a lower prediction error, falling between 3.8% and 10.2%, though there was no significant improvement in R2, which was between 0.47 and 0.65.
Ultra-high-resolution satellites with meter and sub-meter spatial resolution have emerged in recent years providing high-quality RS imaging data for monitoring crop development. RS employed in satellites has recently undergone substantial development, resulting in significant advancements in spatial, spectral, and temporal resolution. Nevertheless, the current cost of high-precision images acquired by commercial satellites remains high, and it is challenging for free satellite imagery at low spatial resolution to provide high-accuracy yield prediction. Moreover, apart from resolution and cost, weather conditions like cloud cover can also limit the data quality of obtained vegetation spectra. Site-specific potato dry matter yield was estimated using GeoEye-1 with an R2 value of 0.60 (Elmetwalli et al., 2014). Due to the cost reduction in satellite launch, a number of commercial companies have launched small satellites that can be leveraged for Earth observation. PlanetScope, launched by Planet comprising 130 small satellites that can capture daily multispectral images at 3-meter resolution. PlanetScope images were utilized to develop potato yield prediction models in Idaho and applied them to assess yield differences between Norkotah and Russet varieties in Lebanon (Abou Ali et al., 2020). Table 2 displays several satellites and sensors that have been utilized for potato yield prediction in recent times. Meanwhile, we present some cases of potato yield prediction with satellites in Table 3.
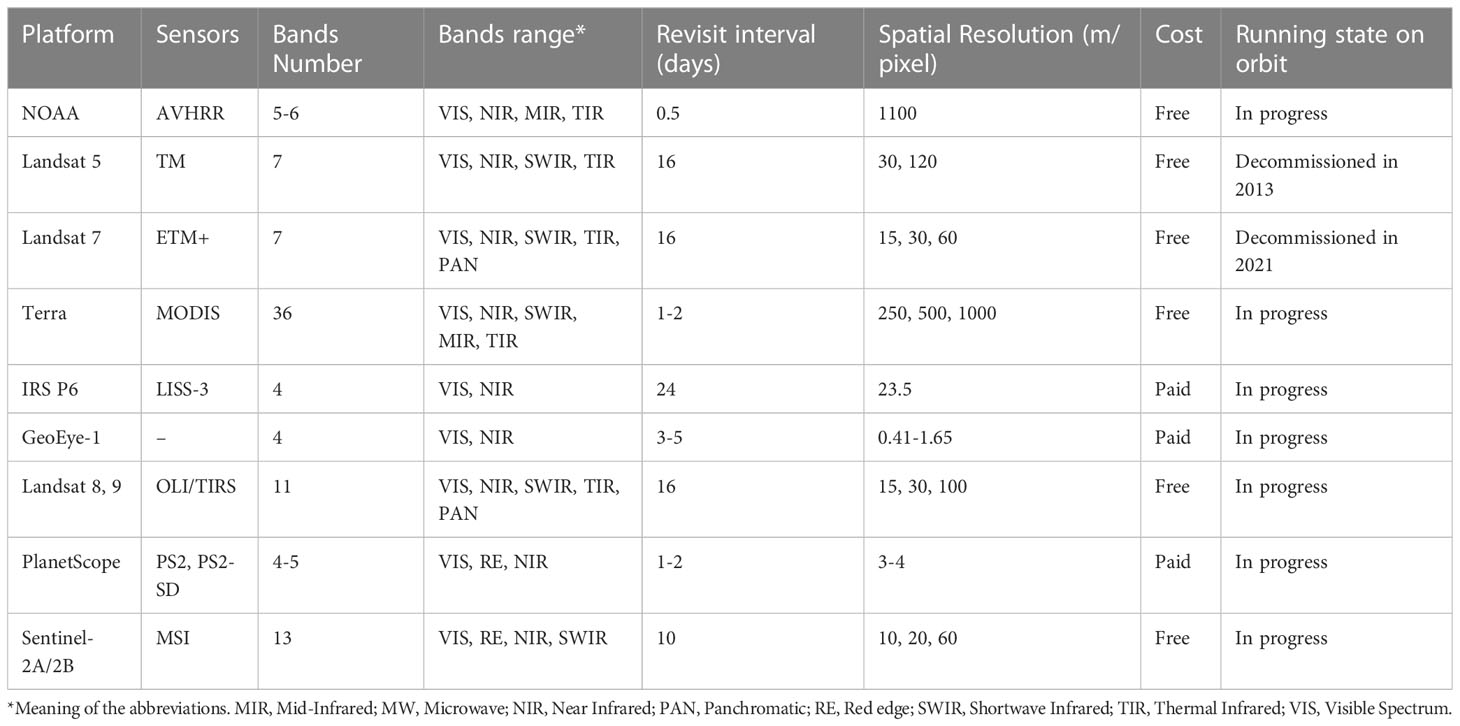
Table 2 Satellites that have previously been used to predict potato yields.

Table 3 Summary of satellite-based potato yield prediction.
For the past decades, RS employed in satellites has undergone substantial development, resulting in significant advancements in spatial, spectral and temporal resolution. Nevertheless, the current cost of high-precision images acquired by commercial satellites remains high, and it is challenging for the free satellite imagery at low spatial resolution to provide high-accuracy yield prediction. Moreover, apart from resolution and cost, weather conditions like cloud cover can also limit the data quality of obtained vegetation spectra.
Aerial-based RS platforms include aerial vehicles at high altitudes and UAVs at low altitudes. A fixed-wing aerial plane Piper Seneca equipped with multispectral cameras was used to capture images of southern Idaho to estimate irrigated potato yield, which can be performed as a flexible and effective tool for yield prediction (Sivarajan, 2011). However, the cost for fuel and professional pilot is high. Recently, UAVs has become an important tool for RS-based yield prediction owing to its advantages of high resolution, high throughput, and low cost (Yang G. et al., 2017). Compared with satellites and manned aircraft, UAVs equipped with high-resolution sensors are able to acquire more detailed vegetation phenotypic information to predict yield. Most of the UAVs for field phenotyping fly at an altitude of below 150 m (Stöcker et al., 2017), and the image resolution can reach the centimeter level. There are several kinds of UAVs used in agriculture, such as multi-rotor UAVs, fixed-wing UAVs and unmanned helicopters. Multi-rotor UAVs are able to hover and turn flexibly in the air (Fu et al., 2020) but with high power usage, which lead to short battery life mostly within 30 minutes. In addition, multi-rotor UAV can carry limited number and types of sensors due to the small payload. Fixed-wing UAVs can fly at high speed with longer battery life, allowing them to cover a large area of farmland in a short period of time. In addition, fixed-wing UAVs with large wings typically have larger payloads which can offer a wider sensor option. However, it is impossible for fixed-wing UAV to capture data in small-scale farms because of the long runways required for takeoff and landing, and the inability to hover and turn flexibly in the air. Multi-rotor UAV is mostly used for potato yield forecasting, which is also for current mapping operations. Although we have not yet found the application of fixed-wing drones in potato yield prediction, they have great potential for large-scale potato field monitoring due to their high speed, long endurance, and large loads.
Compared to satellites that carry a fixed number and type of sensors, UAVs can readily change to appropriate sensors to meet specific needs. For example, it is feasible to extract information such as vegetation structure and reflectance from high-resolution RGB images for growth monitoring and biomass estimation. In contrast to digital RGB cameras that can function in the visible range, multispectral (MS) cameras obtain images at multiple spectral bands, including near infrared, which provides supplemented spectral information to estimate yield by calculating vegetation indexes (VIs). With the relatively low price of RGB and MS cameras, researchers often choose affordable small or medium-sized UAVs to conduct field trials. Most MS can only acquire a small amount of spectral information with low spectral resolution in the visible and near-infrared bands. In contrast, hyperspectral (HS) cameras provide higher spectral resolution with more continuous spectral information than MS. The above-mentioned spectral sensors have specific requirements for weather conditions when performing their tasks; in particular MS and HS need to acquire images in clear and cloud-free conditions.
Relative to passive sensors, active sensors can obtain highly accurate phenotypic information, such as plant height and biomass, independent of sunlight (ten Harkel et al., 2020). Light Detection and Ranging (LiDAR) and Synthetic Aperture Radar (SAR) are typical active sensors available on the market today. LiDAR obtains 3D and echo intensity information of vegetation to monitor crop growth based on the backward scattering characteristics of the light feature (Raj et al., 2020). SAR is a high-resolution active microwave imaging detection sensor that can penetrate clouds to obtain crop phenotypic information independent of atmospheric conditions and solar radiation (Lyalin et al., 2018). Active sensors such as LiDAR and SAR have not been applied in potato yield prediction. Due to the high cost of HS imaging sensor, reliable UAVs, such as the DJI Matrice 600 Pro (DJI Technology Co., Shenzhen, China) is preferred. Despite the advantages of UAVs for yield estimation at a large scale, there are still fewer studies on the application of UAV for potato yield prediction comparing to other staple crops. For reference, we summarize some previous studies of potato yield prediction combined with UAVs in Table 4.
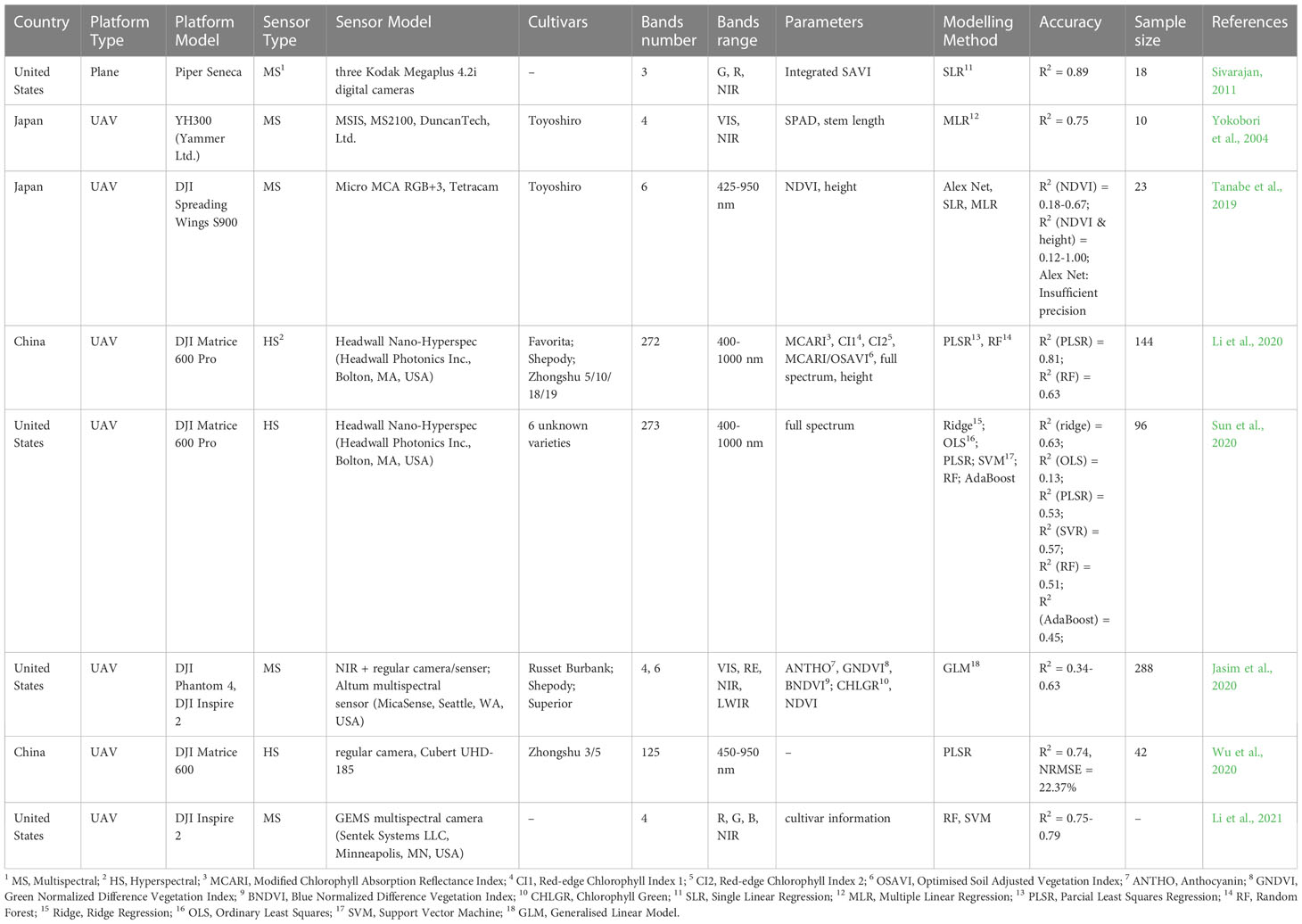
Table 4 Summary of aerial-based potato yield prediction.
Ground-based methods provide higher resolution and more angular image data for crop field phenotype. Many ground-based platforms have been developed, such as handheld or bracketed devices, ground carriers, tracks, ropeways, and fixed towers. They have their own unique advantages for different applications. Handheld or bracketed devices are simple and flexible in acquiring data. Tracks, ropeways, and fixed towers provide continuous observation of the same plot with high-precision sensors. However, they can only acquire data of specific plant samples. In contrast, ground carriers can perform data acquisition tasks over relatively larger areas.
According to our literature review, handheld or bracketed devices are still the most applied ground-based platforms for potato yield prediction. Different sensors have been used to predict potato yield by correlating various factors with yield. Zaeen et al. (2020) combined chlorophyll index (CI) and multiple VIs obtained by active sensors (Crop Circle™ and GreenSeeker™) to improve the performance of potato yield prediction. Their results indicated that the 18th and 20th leaf growth stages were the optimal period for data collection. No significant difference in accuracy between active spectral sensor and passive sensor was found for yield prediction in the early season by comparing handheld active sensors (Crop Circle™ and GreenSeeker™) with the portable MS Altum (MicaSense, Seattle, WA, USA) equipped on UAVs (Jasim et al., 2020). To the best of our knowledge, active sensors such as SAR and LiDAR have not been applied in potato yield prediction.
Proximal handled thermal infrared (TIR) imaging sensors could obtain canopy temperature at higher accuracy, but the accuracy decreased to ±5°C when integrating with UAV due to the impact of environmental conditions for potato yield prediction (Kelly et al., 2019). By capturing imaging data with combining a handheld infrared camera (Ti-32, Fluke Thermography, Glottertal, Germany) and a digital RGB camera (D5100 reflex, Kodak, Tokyo, Japan), an integrated adaptive neuro-fuzzy inference system with a genetic algorithm (ANFIS-GA) was used to predict yield of two potato varieties in a dry crop trial in Egypt (Elsayed et al., 2021). Similarly, we list some studies for potato yield prediction by ground-based RS in the Table 5. Other platforms were not identified for potato yield prediction.
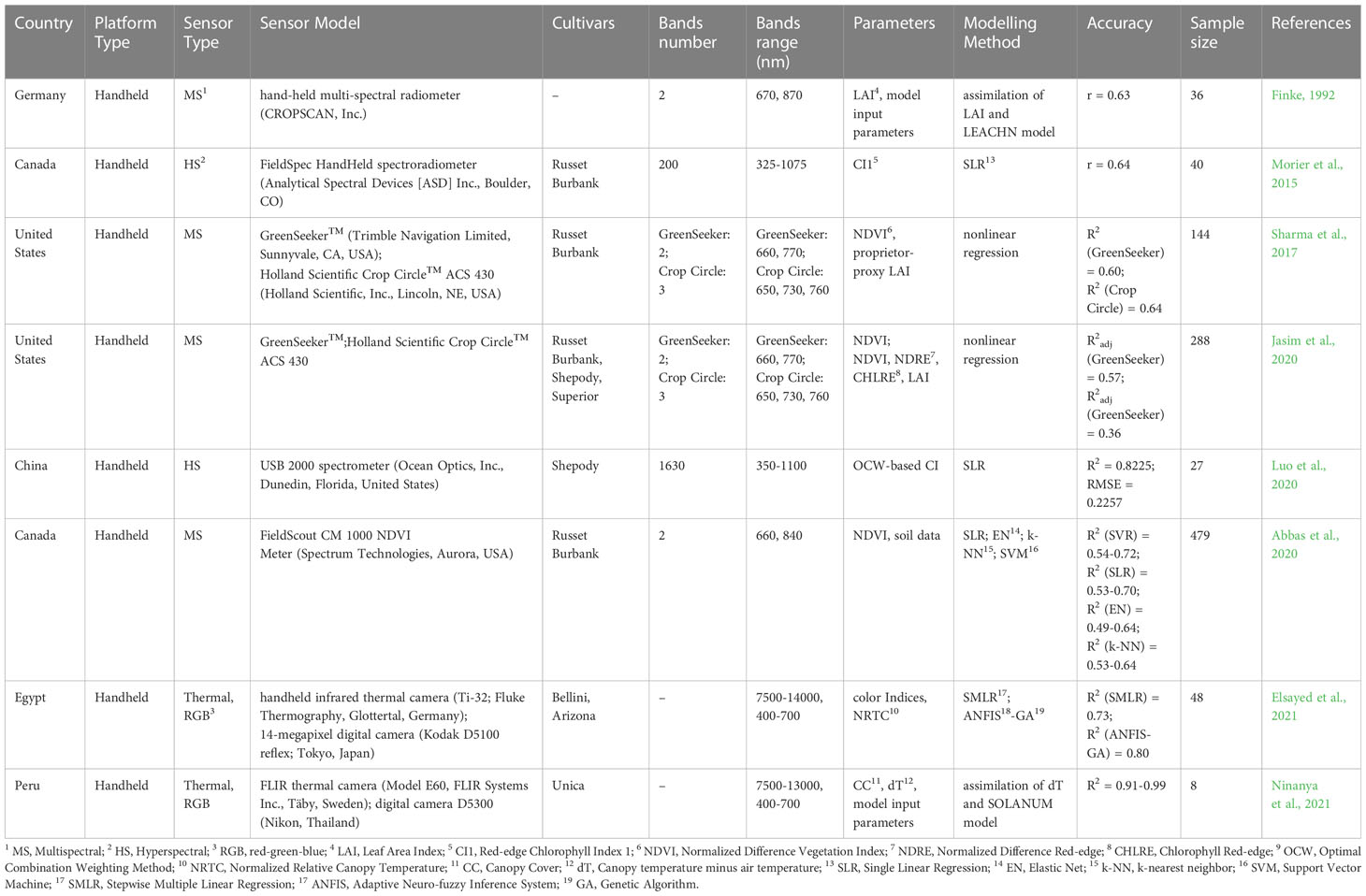
Table 5 Summary of ground-based potato yield prediction.
The spectral, structural, thermal, and textural information of crop canopies are important indicators to explain yield variability (Maimaitijiang et al., 2020). Reflected light from the canopy allows us to estimate the photosynthetic capacity and other crop growth conditions of plants to predict yield. VIs highlight image spectral features to analyze crop phenotypic traits by fusing reflectance information from two or more bands; the normalized difference vegetation index (NDVI) is the most used VI in agriculture RS (Huang et al., 2021). In addition to NDVI, other VIs such as Soil-Adjusted Vegetation Index (SAVI), Ratio Vegetation Index (RVI) and Enhanced Vegetation Index (EVI) are also used in the field of potato yield prediction. Recently, Potato Productivity Index (PPI), calculated based on the two bands at 490 to 945 nm bands considering the key role of water stress on potato tuber development and yield formation, was designed for potato production practices by Gómez et al. (2021). All bands of Sentinel-2, NDVI, PPI, coupled with a random forest (RF) model were adopted to predict potato yield, with the R2 of 0.77. In addition to moisture, temperature is also an important environmental factor affecting potato tuber development. TIR cameras can generate thermal indices such as normalized relative canopy temperature (NRCT) to monitor temperature change on canopy to monitor drought tolerance (Elsayed et al., 2021). The difference between canopy temperature and air temperature can also reveal the water stress status of potato. The full spectral bands obtained by HS cameras provide more spectral information in visible and near infrared region for potato yield prediction than the spectral index above. Potato yield was predicted by using full-band spectra between 400 and 1000 nm (R2 = 0.81), which had better performance than using plant height and several VIs including Red-edge Chlorophyll Index 1 (CI1), Modified Chlorophyll Absorption Ratio Index (MCARI), Ratio2, and Red-edge Chlorophyll Index 2 (CI2) (R2 = 0.69) (Li et al., 2020).
It is essential to select the best period to estimate yield because of the great variation in the predicted performance of different growth periods. The weight of values at different growing periods were determined for estimating yield of potato using a handheld hyperspectral camera (Luo et al., 2020). They believed that the tuber expansion period (about 70 days after planting in this study) was the best period for potato yield prediction with an adjusted R2 = 0.83. In addition, it has also been noted that 90 days after planting is satisfactory for potato yield prediction (Li et al., 2020). This may be caused by the great variation in species and environmental conditions selected for different studies. Meanwhile, many studies have used time series data rather than single period data to predict yields (Fernandes et al., 2017; Aghighi et al., 2018). This could be due to the more comprehensive information on crop growth and development contained within the time-series data. For potato yield prediction, three-date Integrated SAVI (ISAVI) is a better predictor of yield than single-period SAVI (Sivarajan, 2011). Time-series data can also be applied to advanced algorithms such as Long Short-Term Memory networks (LSTM) and three-dimensional Convolutional Neural Network (3D-CNN).
Compared with spectral features, canopy traits such as LAI, plant height, and canopy cover (CC) can reflect the light use efficiency on the canopy. VIs combined with structural parameters such as plant height and LAI provides a better prediction of potato yield (Sharma et al., 2017; Tanabe et al., 2019). In contrast to passive RS, active RS comes with its own radiation source and reflects the characteristics of the ground by transmitting and receiving electromagnetic waves. Their applications are less affected by ambient light and the electromagnetic wave wavelength and emission mode can be set according to different land features, allowing them to obtain the vegetation spatial structure parameters more accurately. In addition to spectral and structural parameters, adding texture features can potentially impact the performance of yield prediction (Ma et al., 2022). However, there are no publications investigating potato yield prediction with texture features extracted from image analysis.
It is also difficult to fully represent the crop growth status by RS data alone. Integrating RS parameters with other indicators of agronomy and meteorology is an effective way to improve yield prediction capability. NDVI combined with plant height provides improved estimation accuracy of potato yield compared with using NDVI alone (Tanabe et al., 2019). Combining soil parameters, such as moisture, conductivity, and nutritional parameters, with NDVI obtained from handheld instruments, potato yield was predicted by Support Vector Machine (SVM) and the determination coefficient of different datasets ranged from 0.54 to 0.72 (Abbas et al., 2020). Likewise, RS information combined with meteorological parameters provides a good prediction of yield with the determination of coefficients ranging from 0.76 to 0.86 in winter and summer growing seasons (Salvador et al., 2020).
Empirical modeling methods, such as Simple Linear Regression (SLR), Multiple Linear Regression (MLR), and Artificial Neural Network (ANN), are mostly used for current RS-based potato yield prediction. LR clearly shows the relationship between one or more explanatory variables and yield. SLR can build a linear relationship between a single parameter and the yield. Introducing more variables including VIs, agronomic parameters, and meteorology by MLR can improve model performance. However, since the relationship between the variables of the dataset is not linear in most real-life scenarios, a non-linear approach is necessary.
With the development of artificial intelligence (AI), ML models have been increasingly applied to RS-based potato yield prediction. An ANN model was constructed with variables including Vegetation Condition Index (VCI) and Temperature Condition Index (TCI) captured by NOAA-AVHRR between 1980-2014 (Akhand et al., 2016). Percentage error was calculated as lower than 10% to quantify the difference between actual and predicted yield. In addition, there are significant differences in prediction accuracy between various ML algorithms. Six ML algorithms (PLSR, Parcial Least Squares Regression; RF, Random Forest; Ridge, Ridge Regression; OLS, Ordinary Least Squares; SVM, Support Vector Machine; GLM: Generalised Linear Model) were compared for potato yield prediction at different irrigation levels using a Headwall nano-hyperspec imager, and ridge regression showed the highest accuracy with R2 of 0.63 (Sun et al., 2020). Yield prediction performance of several ML algorithms were compared using Sentinel-2 images and svmRadial got the highest accuracy (R2 = 0.93) (Gómez et al., 2019). It is also worth noting that varietal differences can significantly impact predicted results. ML combined with cultivar information and UAV-based images was used to improve potato yield prediction (Li et al., 2021). The results showed that RF and SVM models using only RS data yield poor estimation (R2 = 0.48-0.51) but had significantly improved performance (R2 = 0.75-0.79) when variety information was included. The use of ML algorithms combined with high spatial resolution images and cultivar information can significantly improve yield prediction for different potato varieties than approaches without variety information.
The AlexNet algorithm, proposed in 2012 as the first deep learning (DL) model, generates both low- and high-level features of data through a multilayer neural network as the input of fully connected layers before a classification task (Krizhevsky et al., 2017). Compared to conventional ML with handcrafted features, which reaches a bottleneck in model performance with increasing the size of training dataset, DL can further improve model performance by enlarging the training dataset due to the huge amount of generated features. The performance of MLR and AlexNet to assess potato yield was compared and concluded that the DL algorithm was superior (Tanabe et al., 2019). However, the accuracy of the proposed model was still not high enough to meet the requirement in practice, which encouraged the investigation of more complex DL networks. With the rapid development of DL, other networks including LSTM have been widely applied in yield prediction in recent years (Muruganantham et al., 2022). Many DL-based studies have been conducted in other crops (Tian et al., 2021; Liu et al., 2022). However, there is still a lack of application of such DL methods applied to potato yield prediction.
Different from the empirical models that do not have a complete mechanism of crop development, the physical model of RS considering spectra, radiation, and scattering, are deterministic based on the laws of physics. The PROSAIL, a combination of PROSPECT (leaf optical PROperties SPECTra model) and SAIL (Scattering by Arbitrarily Inclined Leaves model), considering leaf angle, canopy structure and biochemical properties of vegetation is widely used for to estimate chlorophyll content, LAI and biomass (Berger et al., 2018). A mechanistic physical model, such as the radiative transfer model, requires a thorough understanding of vegetation structure characteristics and radiative transfer theory. Probably due to high complexity of the models, physical models have not yet been applied to potato yield prediction.
Compared with the mechanistic models based on RS, the semi-empirical models allow a compromise by estimating intermediate variables or simplifying the model. The commonly used semi-empirical approach is the light use efficiency (LUE) model, which calculates dry matter yield by estimating total primary productivity and combining it with harvest index (Monteith, 1972). According to the principle of assimilates accumulation and distribution, yield could be calculated as the product of photosynthetically active radiation (PAR), fraction of absorbed PAR (FPAR), LUE, and harvest index (HI). Calculation formula is shown below:
CGM delineate crop growth and development as a function of environmental factors, such as climatic, soil, and management parameters, predicated upon the physiological and ecological tenets of crops (Raymundo et al., 2014). The mechanistic simulation of potato development is an efficacious tool for predicting potato yield.
The potato growth model has evolved from establishing fundamental principles to widespread application and continuous optimization. The original CGM was established by de Wit at Wageningen University during the 1960s (Bouman et al., 1996). Development of potato CGM began in the late 1970s when researchers designed a model based on physiological characteristics and field experiments. During this stage, the model simulated the accumulation and distribution of assimilates through potential light and thermal conditions, thereby simulating the process of potato yield formation. A simulation of potato growth was conducted by utilizing temperature, photoperiod, and soil moisture during specific time intervals (Sands et al., 1979). Light interception calculated from canopy cover was used to estimate potential potato yield (Van der Zaag, 1984). Similarly, it was posited that fundamental data such as the time of sowing and harvest, soil and air temperature, and solar radiation can be used to estimate the maximum dry matter yield of potatoes (Marshall et al., 1984). The POTATO model, crafted by Ng and Loomis (1984), is the pioneer mechanistic model for comprehensively delineating the morphology and physiology of potato. During this period, models primarily focused on productivity simulations without considering the effects of environmental stress on actual yield.
In the 1990s, soil water and nitrogen dynamic modules were successively incorporated into potato CGM. For instance, SUBSTOR-potato (Griffin et al., 1993), a sub-module of DSSAT, is utilized to simulate potato growth, with its water and nitrogen dynamics module derived from CERES (Crop Environment Research Synthesis). During the same period, numerous studies explored the optimization of potato irrigation and fertilization management schemes using CGM. Additionally, some research employed models to assess the impact of climate change on potato production.
Currently, models are being widely calibrated and validated across different regions to suit the needs of potato growth simulation. Additionally, CO2 response modules have been added to the CGM (Wolf, 2002), which have been extensively used for decision support and climate change response studies (Raymundo et al., 2018; Tang et al., 2021). The uncertainty in potato models caused by model structure, model input, and model parameters has already attracted the attention of researchers (Ojeda et al., 2020). This has been extensively studied in other crops (Bert et al., 2007; Wang et al., 2020). In addition, CGM utilize data of specific samples, which cannot reflect the spatial heterogeneity of large-scale farmland. Combination of the high-throughput and full-coverage advantages of RS with the complete mechanism of CGM makes the assimilation of RS and CGM an effective way to achieve continuous spatiotemporal monitoring of potato growth dynamics. For instance, in recent years, AquaCrop has emerged to simulate crop yield using CC as an intermediate variable, which is closely related to RS. However, there is still limited research on predicting potato yield using assimilation techniques. Table 6 illustrates the application of CGM for predicting potato yield in recent years.
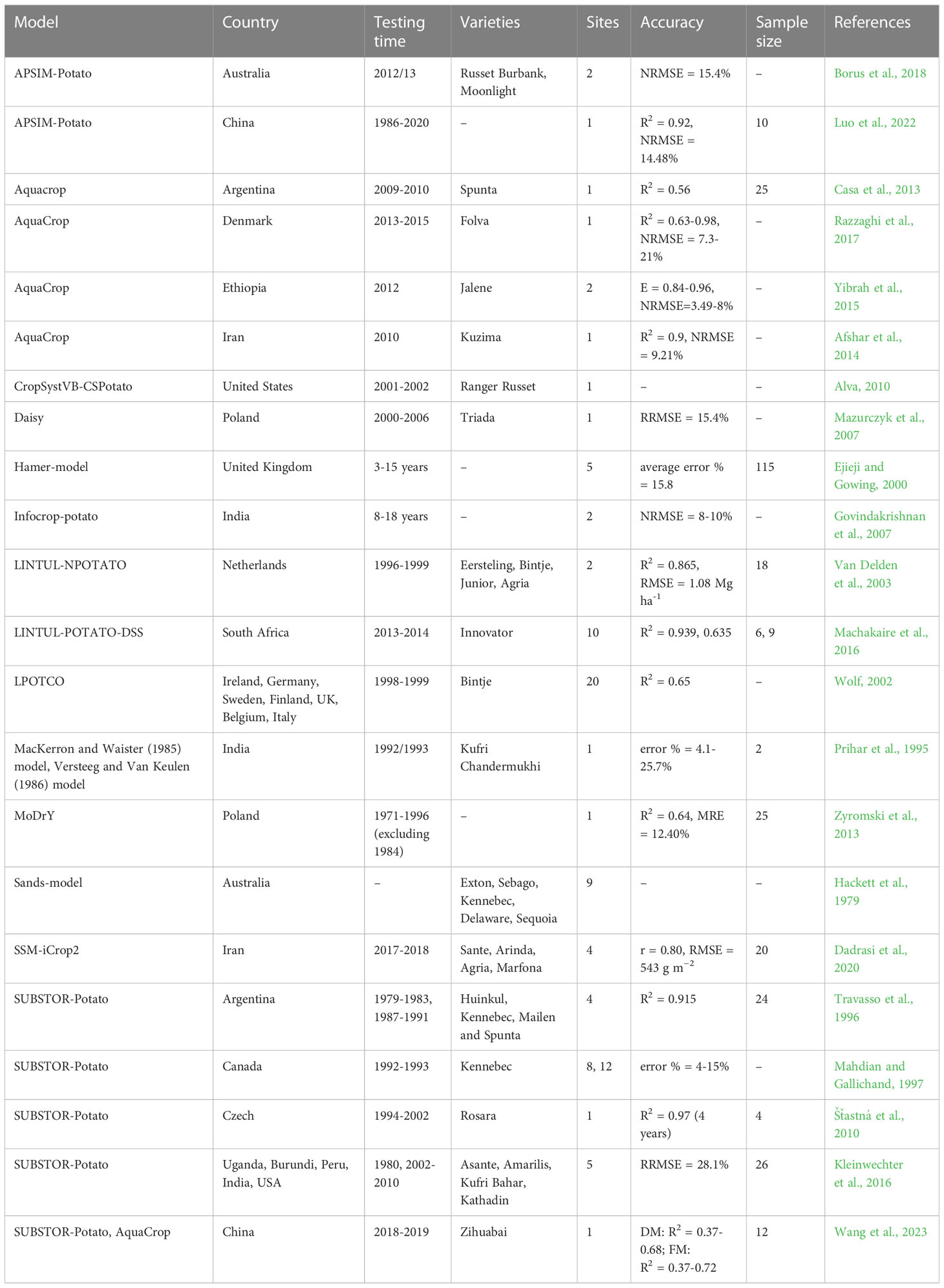
Table 6 Summary of CGM-based potato yield prediction.
After more than 40 years of evolution, dozens of potato growth models have been built. The principles of CGM have certain commonalities. Most models include basic crop growth, meteorology, soil, and management modules. The models also have their own focuses and have formed their own schools in various parts of the world and in different application fields. In this subsection, we will introduce some common potato CGM and systematically evaluate their applications over decades.
The potential productivity of a crop can be derived by simulating the net photosynthesis and the percentage of assimilates apportioned to the tubers (Weir et al., 1984). Multiple CGM employ this underlying principle while integrating environmental modules such as soil and climate to simulate yield. Among the early potato models, POTATO stands out as a light-driven model, which completely simulates the growth and development of the crop. Nonetheless, this model is still an oversimplified representation of the crop’s growth. Potato yield was effectively modeled by modifying the POTATO model through adjusting the photosynthetic capacity of potatoes on cloudy days (Ewing et al., 1990). In contrast to POTATO, which results in overestimated yields, NPOTATO offers more accurate yield simulation (Wolf, 2002).
SUBSTOR-Potato, a light-driven model derived from CERES, is a more comprehensive and widely used model. For improved accuracy, SUBSTOR-Potato 2.0 added water and nitrogen simulation modules (Griffin et al., 1993). Over decades of research and experimentation, researchers have identified some shortcomings in the model. As the number of studies increases, the model is constantly being refined. In a Canadian study, SUBSTOR-Potato was applied to simulate yield, but an underestimation of 15% occurred due to incorrectly simulated soil moisture content (Mahdian and Gallichand, 1997). Similarly, the model predictions may still underestimate yields under extreme weather conditions. Data from 87 field experiments was synthesized and it was proposed that it is necessary to improve SUBSTOR-Potato to capture the effects of increased atmospheric CO2 concentration and temperature rise on crop growth (Raymundo et al., 2017). In DSSAT version 4.7, this problem was solved by modifying the response function (Raymundo et al., 2018). However, this version of DSSAT still neglects the impacts of pests and diseases on yield loss caused by quality degradation (Tooley et al., 2021).
LINTUL-Potato, which is based on the light interception and utilization model, carefully considers the influence of temperature and daylength on potato yield formation (Kooman and Haverkort, 1995). Temperature is significant in seedling emergence, light energy utilization, canopy morphogenesis, tuber bulking, and yield formation, while photoperiod has a considerable effect on light energy utilization and potato tuberization (Snyder and Ewing, 1989). By assessing the effect of freezing on yield, the simulated result of LINTUL-Potato showed that an increase in the cold tolerance of potatoes from -1°C to -2°C and -3°C led to respective increases in average yield of 26% and 40% (Hijmans et al., 2003). In addition, numerous models have been derived from LINTUL-Potato that are tailored to various scenarios. Van Delden et al. (2003) simulated nitrogen dynamics and potato yield under different organic nitrogen management strategies in the Netherlands using LINTUL-NPOTATO. Similarly, the LINTUL-Potato model was optimized for simulating yield of potatoes with different genotypes in the Andes Mountains by the International Potato Center (CIP). The revised model known as SOLANUM (Condori et al., 2010) showed acceptable results (R2>0.88). LINTUL-POTATO-DSS is an enhanced version of LINTUL-Potato that reduces the potential for errors during computation by utilizing fewer parameters (Haverkort et al., 2015).
Simulating the formation and distribution of photosynthetic assimilation products is essential in the CGM. Moreover, moisture dynamics are critical in determining potato yield. Some models utilize the transpiration or evapotranspiration of the crop or soil as a driver to simulate crop growth and yield formation processes. These water-driven models can assist in the development of rational irrigation practices for efficient utilization of limited water resources. The AquaCrop model (Steduto et al., 2009), developed by the Food and Agriculture Organization (FAO) of the UN, is an example of a water-driven model that calculates biomass as the product of water productivity (WP) and cumulative evapotranspiration, multiplied by a harvest index to determine yield:
where Y is final crop yield (kg·m-2), B is biomass (kg·m-2), HI is harvest index (%), Tr is transpiration (mm), and WP is water production efficiency (kg·m-2·mm-1).
Compared to other models that require numerous input parameters, the AquaCrop model is relatively simple and demands fewer input parameters. Furthermore, AquaCrop employs CC rather than LAI to depict the canopy structure, which allows for direct use of RS data with this model (Steduto et al., 2009; Sun et al., 2017). AquaCrop was employed to achieve better simulation results for potato tuber yield under varying irrigation conditions (R2 = 0.98, NRMSE=0.046) (Razzaghi et al., 2017). However, it should be noted that AquaCrop demonstrated limited efficacy in simulating each indicator at higher or lower irrigation levels (Jin et al., 2019).
Another class of water-driven model integrates a CGM with a hydrological model to describe the impacts of alterations in crop water management on potato respiration and yield. A combined SWAP-WOFOST model was employed to evaluate productivity and recommended the inclusion of capillary rise and recirculation in the model to enhance the precision of potato yield prediction (Kroes et al., 2018).
The improvement of crop yields is heavily reliant on the use of fertilizers, particularly nitrogen fertilizers. Nonetheless, excessive nitrogen application can inflate production costs, harm the environment, and pose risks to human health (Zhang et al., 2015). Precise management of nitrogen fertilizer can diminish pollution while also reducing expenses. Researchers recognized the significance of accurate nitrogen management several decades ago and integrated a nitrogen simulation module into the potato model. DAISY, a one-dimensional soil-plant-atmosphere system model, can simulate crop production, soil water balance, carbon and nitrogen cycles, and so on (Plauborg et al., 2022). DAISY was employed to simulate root abscisic acid (ABA) synthesis, stomatal conductance, transpiration and yield under water-saving irrigation conditions in potato crops (Plauborg et al., 2010). Potato yield under different split-N fertigation regimes was simulated and it was observed that prolonged N fertigation consistently increased yield (Zhou et al., 2018).
The APSIM-Potato model is part of the Agricultural Production System Simulator Next Generation (APSIM) family. APSIM simulates potato development and yield formation based on radiation, temperature, photoperiod, soil water, and nitrogen balance in daily increments (Keating et al., 2003). Many studies conducted in Australia and China have focused on water, nitrogen, sowing management, and strategies for coping with climate change (Tang et al., 2021; Li et al., 2022). APSIM-Potato, however, requires additional parameters to improve model performance (Borus et al., 2018).
The World Food Studies (WOFOST) model, developed based on the SUCROS model from Wageningen University, incorporates water and soil simulation modules to primarily simulate regional-scale crop growth and yield changes (Van Diepen et al., 1989). A study that simulated the yield of early potatoes under water-limited conditions indicated that simulation results of WOFOST are sensitive to water deficits (Kulig et al., 2020). Subsequent versions of WOFOST have included a CO2 response module to better simulate the effects of climate change on potato yields.
The utilization of RS technology enables high-throughput and non-destructive acquisition of crop phenotype data in the field. However, it falls short in simulating the crop yield formation process and lacks a strong mechanistic foundation. Mechanistic CGM simulate crop growth and development as well as yield formation processes, but they use specific samples, an aspect that is lacking in spatial expansion. The assimilation of RS and CGM can leverage the advantages of both to enhance the prediction accuracy of various crop canopy state variables and yields at regional and national scales. Despite several studies being conducted on RS and CGM assimilation for other crops, limited research has been conducted in potato. LAI acquired by Gaofen-1 (GF-1) satellite data was employed as the assimilated variable coupled with DSSAT-SUBSTOR with the SCE-UA optimization algorithm for regional potato yield prediction (Duan, 2019). The mean relative error (MRE) was only 6.17%, 9.45% lower than that of unassimilated RS data. Quiroz et al. (2017) estimated single-point potato yield using CC and the weighted difference vegetation index (WDVI) corrected crop growth model SOLANUM. Current data assimilation algorithms such as Ensemble Kalman Filter (EnKF) and Four-Dimensional Variational Data Assimilation (4DVAR), have emerged, which could lead to further research progress in assimilation studies of RS and CGM. Due to the lack of application of assimilation methods, the technical gaps might increase between yield prediction of potato and other crops.
In the past, agronomists predicted potato yields by the “visual method” using basic conditions of local agricultural production and the growth of potatoes. Considering the impact of yield-enhancing technical measures and the yearly climate on yields, they assessed potato yields per unit area visually and by experience. However, this method relies on the investigators’ experience with crop growth and development patterns and yield formation rules, which is highly subjective. When new situations arise, such as the adoption of new technologies, the promotion of superior varieties, or when crops suffer severe losses due to abnormal disasters, the judgment of crop growth status often exceeds the investigators’ experience. This method thus often results in large errors in yield estimates and is rarely used in current agricultural production. Instead, quantitative yield estimation models based on LFs have become an important method for predicting potato yields.
Methods employing traditional agronomic parameters were applied in potato yield prediction before the advent of RS and CGM. Earlier studies destructively sampled tubers to record potato weight and number of potatoes to estimate yield directly (Dyke and Avis, 1953). In addition, canopy parameters could be linked to yield by reflecting the growth status. The first category is structure indicators that can directly reflect photosynthetic capacity, such as LAI and leaf number. At the canopy structure level, planting density and number of leaves were used as yield indicators and achieved a reduction of mean squared error (MSE) of 9% (Singh et al., 2020). In addition, some physiological and biochemical indicators have been adopted. The highest correlation between yield and chlorophyll content (expressed as SPAD) has been revealed with an R2 value of 0.663 (Meng et al., 2021). The nutritional status of the 4th leaf, as measured by the Mg DRIS index (Mgi) and N DRIS index (Ni) during the onset of tuberization, have demonstrated potential as yield predictors. Moreover, N content in stems has shown a strong correlation with marketable tuber yield (MTY), while the Ca:N ratio in stems has displayed the highest correlation with MTY.
Traditional regression methods often have inadequate simulation performance, while some innovative methods provide better prediction results. For instance, a Canadian study demonstrated that using a three-input multiple-layer perceptron (MLP) network with cumulative LAI, maximum LAI, and cumulative rainfall achieved a higher accuracy in yield estimation than MLR and SUBSTOR (Fortin et al., 2011).
Methods based on agronomic parameters often require tedious field sampling. In addition to the plant itself, environmental and management factors, among others, can affect yield. Therefore, the ability of a method to simulate different cultivation and management conditions varies.
Environmental factors affecting crop growth, such as meteorology, soil, pests, and diseases, could be considered yield indicators. The concept of using meteorological data to replace destructive sampling for predicting potato yield was proposed in a report in 1929 by an unknown author in the American Potato Journal. In addition, the agro-ecological zone (AEZ) model, jointly developed by the FAO of the UN and the International Institute for Applied Systems Analysis (IIASA), predicted the yield potential of different potato farming areas based on statistical data in China from 1961 to 1997 (Cai et al., 2006). In a study examining the relationship between meteorology and yield variability over multiple years, models were constructed with 35 years of data based on MLR, stepwise regression, and BP neural networks, with MREs of 6.715%, 7.811%, and 4.479% (Yang S. et al., 2017). Piekutowska et al. (2021) constructed MLR and ANN models using yield data and meteorological and management data from 2010 to 2017, with the ANN model estimating potato yield more accurately (R2 = 0.86).
Furthermore, soil indicators have been utilized as predictors of potato yield in some studies. For instance, ANN and MLR models were constructed that incorporated soil infiltration resistance, organic matter, microbial load, and tillage system, resulting in superior prediction of potato yield, with R2 values of 0.951 and 0.894, respectively (Abrougui et al., 2019). Yield was simulated based on soil apparent conductivity and achieved an R2 between 0.57 and 0.66 (Frąckowiak et al., 2020). However, yield loss due to pests and diseases also constitutes an essential component of yield prediction theory. It was reported that the rate of yield loss caused by 64 potato cyst nematode eggs per gram of soil ranged from 8.5% to 56% and 9% to 58%, for two experimental sites (Hajihassani et al., 2013).
Several environmental indicators can be used as yield indicators because their variability greatly affects potato yield. However, as with methods based on agronomic parameters, these methods do not reflect the full range of potato yield formation.
The approach based on input-output theory considers various agricultural inputs, including human labor, energy, fertilizer, irrigation, pesticides, and so on (Chen and Wang, 2010). Some of the input-output model for yield prediction were developed by quantifying the effects of different energy inputs on yield by combining economic mathematical models such as the Cobb-Douglas function. Potato production was estimated in Iran using input-output theory combined with ANN and ANFIS, with correlation coefficients of 0.925 and 0.987, respectively (Khoshnevisan et al., 2014). Farm potato production was compared in Iran combined with various inputs, such as manpower, machinery, diesel, fertilizer, farmyard manure, pesticides, electricity, irrigation water, and seeds (Hamedani et al., 2015). In addition, empirical statistical models consider the yield of previous years as a crucial indicator for yield estimation.
This type of model generally employs a questionnaire to acquire the different forms of energy inputs. However, the most significant aspect of questionnaire approach might be the representativeness of the respondents and the authenticity of the survey data. Additionally, there are some differences in total energy consumption and potato yield among various production models (Al-Hamed and Wahby, 2016). For instance, the energy ratio, energy productivity, and net energy of large-scale farms (>3 ha) were considerably higher than those of smaller farms (Khoshnevisan et al., 2014). These factors constrain the applicability of prediction methods at different scales.
This study revealed the research progress of estimating potato yield since 1953. A systematic review of different methods provides an important reference for understanding potato yield prediction applications. In this section, application scenarios, and advantages and disadvantages of various methods are systematically discussed. Additionally, the trend of potato yield prediction is prospected.
Different application scenarios necessitate the use of matching yield prediction methods. Yield prediction could be used to create maps of potato yield layout in various regions and to identify the most suitable planting areas within the planting structure layout. Precise pre-harvest yield prediction at the international trade level is beneficial for early adjustment of trade policies to manage evolving international trade dynamics. Furthermore, in large-scale potato production, pre-harvest yield estimation enables development of timely marketing and storage plans to ensure economic benefits. We present several application scenarios and discuss the applicable yield prediction methods below.
Potato yield forecasts at the regional and national level can support decision-making in planning growing areas and international trade. Satellite RS is the most intuitive and effective method to meet these demands because it can monitor the extent of potato cultivation over large areas while obtaining various parameters for assessing vegetation growth and predicting final yields. In contrast to traditional statistical survey methods, satellite RS can provide accurate and real-time maps of potato yield distribution. Combining yield mapping for other crops and yield projections for different geographic spaces under future climate change conditions can identify more suitable planting areas for each crop. The integration of satellite RS technology and CGM can facilitate the prediction of crop yields over large areas with greater accuracy and precision. Satellite-based RS could predict yield about two months before harvest to allow earlier development of trade strategies and ensure economic development and food security.
From a farm perspective, potato yield prediction provides decision support for marketing and storage strategies. High-resolution satellites could be used to predict potato yield for large plantings. However, it is preferable to use UAVs to acquire high-resolution image data for slightly smaller farmlands. Companies in smart agriculture could provide these special services. In addition, long-term yield forecasting services, such as MARS Crop Yield Forecasting System (MCYFS), are necessary for all stakeholders.
Estimating potential yield through crop models and simulating potato productivity under different environmental conditions can offer suggestions to potato farmers to reduce yield differentials, such as implementing better management strategies for irrigation, fertilization, and sowing period (Deguchi et al., 2016; Li et al., 2022). UAV RS provides a fast and non-destructive way to access field phenotypes and is an important tool for decision support in field management. Various yield estimation models can also be integrated with intelligent management systems to achieve accurate field management.
The image processing and model building for UAV remote sensing and CGM can be challenging and require specialized skills. However, many growers may not have the necessary professional background to conduct yield prediction using these methods. To address this issue, smart agriculture companies with expertise can provide data collection, analysis, and integrated delivery services. For instance, a user interface based on the input-output model was developed using C-sharp that enables direct potato yield prediction (Al-Hamed and Wahby, 2016). In addition, the CGM could provide decision support for precision management by simulating the potato growth process under different management and climate conditions. However, it is still necessary to use different varieties to calibrate CGM in different regions. Due to the complexity of CGM, some simplified models, such as AquaCrop, might be suitable.
As smartphones become more prevalent, one approach to site-specific yield forecasting is to deliver dependable yield projections and decision-making support by incorporating multiple sources of big data into mobile devices and designing an intuitive user interface for potato farmers. It is critical that the yield estimation technique is practical and comprehensible. It should provide unambiguous information as accurately as possible while remaining applicable to commercial farming practices. Dispelling user misunderstandings is crucial in facilitating replication. Conducting pilot studies and demonstrating the effects of yield estimation in specific regions is an effective means of promotion.
Assessing the impact of climate change on potato growth and yield is beneficial for selecting the most suitable varieties and management strategies under climate change conditions. However, the impact of climate change on potato production varies due to differences in cultivation areas, growing seasons, and cultivation management practices (Bender and Sentelhas, 2020; Yagiz et al., 2020).
There are many studies pointing to a possible decline in potato yields under future climate change conditions. Applying future climate change scenarios to current potato cropping systems using an improved SUBSTOR-potato, it was pointed to a small decline in global tuber production by 2055 (-2% to -6%) and a large decline by 2085 (-2% to -26%)(Raymundo et al., 2018). DSSAT was used to simulate the yields of barley and potato under future climate change conditions (Holden et al., 2003). Non-irrigated potato tuber production in Ireland is projected to decline in 2055 and 2075 due to water shortages. A study of yield changes under future climate change scenarios for a variety of crops in Mexico using AquaCrop suggests that Mexican potato yields will decline (Arce Romero et al., 2020).
Interestingly, other studies have produced the opposite result. The possible negative effects of increased temperatures and reduced water availability for potato are offset by the positive effects of increased CO2 levels on water use efficiency and crop productivity (Haverkort et al., 2013). By mid-century, potato yield variability and productivity will increase in Belgium with greater variability between climate change models than spatial variability (Vanuytrecht et al., 2016). The differences in prediction results could be attributed to the different CGM and study areas used in these investigations. In addition, different climate change scenarios also produce different simulation results (Pushpalatha et al., 2021). Despite extensive research on the impact of climate change on potato yields, validation of previous climate change impact assessment results on yields is still lacking.
According to the prediction results, it is possible to implement corresponding countermeasures, such as changing the planting area or management practices. For example, optimizing sowing and irrigation strategies can improve agro-pastoral ecotone (APE) potato yield and water productivity (Tang et al., 2018). Delayed sowing and selection of medium-maturing potato varieties are important ways to cope with warm and dry climates in the APE of northern China (Li et al., 2019). WOFOST has been integrated into the Crop Growth Monitoring System (CGMS) to assess the impacts of climate change. The impact of climate change on potential productivity of potato was studied in West Bengal using the WOFOST crop growth simulation model (Dua and Sharma, 2017). They minimized the impact of climate change by selecting appropriate varieties and changing planting dates to design management strategies.
Various prediction methods have their own characteristics. In this section, yield prediction strategies are compared and the knowledge gaps between potato and other crops are presented.
RS-based methods could replace other destructive sampling methods by obtaining crop phenotype through non-destructive methods to build yield prediction models. Morier et al. (2015) inferred nitrogen stress and estimated potato yield combined with a handheld hyperspectral sensor (FieldSpec handheld spectroradiometer), which obtained similar results to destructive methods. In addition, there are significant variations between different platforms and sensors for predicting potato yield.
Satellite RS can be used to monitor large areas of field with its wide coverage. However, the constraints of cloud cover and revisit cycles might limit the availability of images. Additionally, the low spatial resolution of satellite results in a blended image element composed of soil and vegetation is challenging to process. Yield prediction using satellites faces significant challenges in many regions due to small plot sizes, mixed cropping, and intercropping. Advanced satellites and image processing methods might solve these problems. Satellites used for potato yield estimation are detailed in Table 2. Currently, satellites equipped with spectral sensors are still prevalent, and there is a lack of active RS satellites, such as the C-SAR-equipped GF-3 with high resolution of 1 m, applied to related research. In addition, hyperspectral satellites have not been applied to predict potato yield.
Compared to satellites, proximal RS is more suitable for site-specific rather than regional yield prediction. UAVs are a promising solution for precision agriculture management, given their high resolution, low cost, and flexibility. According to our literature survey, studies on potato estimation with UAV RS have employed a variety of sensors, but there are few applications of UAV-based active sensors. Fixed-wing drones are also applied less in potato yield prediction, although their applications in more rapid monitoring of large areas of farms cannot be ignored. Ground-based RS can capture phenotypes with higher resolution. However, handheld instruments have incomplete spatial coverage and are time-consuming for sampling. Additionally, fixed ground-based phenotyping devices have limited coverage and come with high costs.
Potato yield formation can be described as the production of photosynthetic assimilates multiply by the harvest index (Khan, 2012). The growth dynamics of the aboveground canopy can directly reflect canopy light energy interception and thus affect the formation of photosynthetic assimilation products. Therefore, many practical applications in the studies we investigated have been conducted to predict potato yield by directly obtaining aboveground phenotypes from passive optical sensors. However, they can only obtain information from the top of the canopy and are susceptible to clouds and light. Active sensors that used controlled sources of radiation, such as SAR and LiDAR, are not affected by weather and clouds. Another method is to detect the underground tubers directly by sensors with penetrating ability. Longer wavelengths are more penetrating because the object absorbs less of the wave. There has been a study conducted on the use of sound waves for detecting sweet potatoes in sandy soil (Iwase et al., 2015). However, the research is still in its preliminary stages. Computed tomography (CT) can be used to obtain potato tuber phenotypes non-destructively using X-ray to penetrate the soil for precise yield prediction. Nevertheless, CT is mostly used in indoor pot experiments (Ferreira et al., 2010), and it is difficult to apply it in open conditions due to the associated radiation dangers and the requirements of a receiver after penetrating the tuber. Ground penetrating radar (GPR) is an effective means of non-destructive detection of underground targets. Although GPR is still at the research phase in the detection of underground tubers in potato with limited throughput, this type of tool has great potential for future potato yield prediction (Cheng et al., 2022). Currently, there are few studies comparing active and passive sensors for potato yield prediction, and more research is needed to evaluate the predictive performance of both.
There are some differences in potato RS-based yield estimation compared to other crops. For example, computer vision (CV) is widely used in intelligent yield prediction to identify and count fruits for further harvesting and marketing decisions (Ramu and Priyadarsini, 2021), but potato tubers located underground are difficult to observe directly by conventional optical sensors. Sound waves and CT could obtain tuber phenotype without the effect of soil, but most studies are limited to potted plants. In complex field conditions, there is a lack of research on obtaining potato tuber phenotype directly for predicting yield. Furthermore, the leaves of potatoes are compound, and the propagation path of light between the leaves is different from that of rice and other field crops. It is necessary to improve or establish a dedicated RS-based yield prediction methods for potatoes, taking into account the inherent characteristics of potato.
Compared to the mechanistic model, most RS-based methods build empirical models by observing aboveground phenotype directly. In addition, these complex relationships between crop growth and external environmental factors, including meteorological conditions, soil nutrients, and field management, remain difficult to accurately capture through RS.
Despite significant progress in the development of theoretical models and operational systems for RS yield estimation, the limitations of current RS technology prevent accurate and quantitative reflection of the underlying mechanisms of crop development and yield formation.
CGM simulate yield with comprehensive information of variety, management, meteorological parameters, and soil. CGM thus have a complete mechanism to simulate the crop growth process, which is their most significant property. In addition, along with yield prediction, CGM can simulate other elements such as water and nitrogen dynamics of crops to provide support for precision management. Finally, combining CGM with climate change models could predict the yield potential under different regions, cultivars, and cultivation strategies under future climate change conditions to make optimal decisions.
However, most CGM make accurate simulations based on numerous input parameters, which is often difficult to achieve in potato production. In addition, CGM require laborious field trials to calibrate and validate the models for different varieties in different regions. Somewhat simplified CGM, such as AquaCrop and LINTUL-POTATO-DSS, which significantly reduce the number of input parameters, have also been developed in recent years. Additionally, the establishment of a database platform of shared variety parameters helps to enhance the applicability of the models.
Compared to large scale RS methods, CGM cannot reflect the variation of yield in different spaces by collecting data from specific samples. Assimilation of RS with CGM could extend the model application to a regional scale. In addition, although some models use a constant HI, the effectiveness of such an approach is not always satisfactory. Techniques for assimilating external observations into the model to continually adjust certain state variables and attributes can be used to enhance model performance. RS data can offer prompt updates on crop or environmental conditions, allowing for periodic updates of model simulations during the simulation process (Hao et al., 2021).
Currently, DSSAT-SUBSTOR is still the most widely used model for predicting potato yield. However, due to differences in the modeling principles of individual models, these models often exhibit different simulation results. Uncertainty due to differences in model structure could be reduced by multi-model ensembles (MME), which could improve the prediction performance compared to a single model (Martre et al., 2015).
In addition to yield, commercial attributes of potato are also very important. Tuber yield and tuber size (expressed as number of tubers per 10 kg) were simulated using LINTUL-POTATO-DSS (Machakaire et al., 2016). However, there were few studies that simulated commercial indicators such as potato tuber size. Additionally, unpredictable extreme weather events remain a concern, and even with the ability to anticipate and forecast potential risks, current capacity to cope with them is limited.
Yield prediction based on physiological and biochemical agronomic indicators, require frequent manual sampling, but achieving full spatial coverage is often challenging. In addition, many agronomic parameter-based approaches employ one or a few parameters for empirical modeling, which might lead to weaker generalizability.
Meteorological parameter-based methods predict potato yields under specific climatic conditions, without laborious field sampling. However, multi-year historical yield and climate data is difficult to obtain in reality. As with the agronomic parameter-based approach, which employs an empirical approach to modeling, this method also oversimplifies. Simulation results are not reliable with drastic changes in weather conditions. Providing farmers with suitable agricultural insurance may be a way to mitigate the adverse effects of unexpected weather conditions. With the growing scope of agricultural informatization, developing a precise and comprehensive agricultural information data platform containing a range of meteorological and yield data is crucial to achieve multi-year yield prediction.
Yield prediction methods based on input-output theory necessitate multiple input parameters, which are frequently derived from interviews with growers. Meanwhile, farmer surveys are also labor-intensive. Ensuring the accuracy of the data collected can be challenging (Fermont and Benson, 2011).
Uncertainty is a range centered on the true value, and the larger the range the greater the uncertainty (Lu, 2004). Model uncertainty emerges due to necessary simplification of the real physical process. Differences between the theoretical and real values due to various factors such as assumptions made during model construction, boundary conditions, and the difficulty of reflecting them in calculations at the current state of technology are considered model uncertainty (Xing and Guo, 2006). Potato yield formation is a complex system determined by a combination of cultivation management practices, climatic conditions, soil conditions, and varieties. The yield simulation process could be influenced by any changes in the above conditions. At the same time, different parameter selections, model inputs, and model structures can lead to uncertainty when constructing potato yield prediction models. It is important to address sources of uncertainty and improve the adaptability of model prediction accuracy and prediction confidence for accurate and reliable potato yield prediction (Ma et al., 2021).
The causes of uncertainty include inherent limitations in predictability (e.g., future greenhouse gas emissions) and deficiencies in forecasting skills (e.g., flaws in model design)(Challinor et al., 2013). Model structure, inputs, and parameters are the three main sources of uncertainty (Wallach et al., 2016). Although the empirical statistical model is computationally simple, there is uncertainty in the functional form and coefficients of different modeling approaches (Wu et al., 2014). Any simple model-based or empirical regression-based inversion is unlikely to produce stable inversion results, and accounting for errors in ground truth and sensor data can improve the estimation accuracy of the parameters in the model (Fermont and Benson, 2011). The mechanistic model simplifies the real growth state of the crop due to assumptions made in the construction process, boundary conditions, and the difficulty of responding in the calculations at the current level of technology. Therefore, the uncertainty caused by the model structure needs to be considered in yield prediction.
Moreover, the accuracy and representativeness of the yield prediction model largely depends on the accuracy of the input data, including weather, soil, and management information. The uncertainty of these input data, especially in large-scale applications, can lead to significant errors in the prediction results. Therefore, it is necessary to further improve the accuracy of input data acquisition and data processing methods to improve the accuracy of yield prediction methods. In terms of RS, its integration with other methods, such as ground-based sensors and machine learning algorithms, can also improve the accuracy and practicality of yield prediction models. For example, RS data noise and environmental stress can increase the prediction uncertainty (Ma et al., 2021).
Uncertainty in model parameters, on the other hand, is a bias in simulation results due to deviations in the selection of parameters. For example, the impact of parameter value uncertainty on spring wheat phenology prediction uncertainty was quantified, and the relative contribution of model structure-driven and parameter value-driven uncertainty to overall prediction uncertainty were assessed (Alderman and Stanfill, 2017).
Few studies address all three sources of uncertainty simultaneously. For CGM, most studies have been devoted to the resolution of model input uncertainty. Sensitivity analysis is the most used uncertainty analysis method to determine which model inputs are more important for simulation results (Matott et al., 2009). In addition, other methods such as Monte Carlo analysis, Bayesian methods, and Generalized Likelihood Uncertainty Estimation (GLUE) can be used for model uncertainty analysis. Currently, most uncertainty assessments focus on the three staple crops wheat, maize, and rice, with less research on potato. Yield forecasting is the most concentrated area of uncertainty research because of its importance and because the results are influenced by many factors (Chapagain et al., 2022).
The yield estimation performance of models with a single source of estimation information are often inferior to estimation models that combine data from multiple sources. Previous studies have shown that combining multiple image feature parameters can improve yield prediction accuracy. Incorporating various parameters in RS yield estimation models can improve model performance. The crop model AquaCrop was combined with an economic model for optimizing irrigation management at the farm level (Garcia-Vila and Fereres, 2012). It is significant to use field trials, simulations, and deep learning models to study changing sowing dates to mitigate the effects of climate change (Dewedar et al., 2021). By combining deep learning algorithms with multi-source imagery including LiDAR and optical sensors, crop detection can be significantly improved (Prins and Van Niekerk, 2020). Coupling crop models with RS data is now a common method for yield estimation. RS images can be used to invert the LAI and applied to the crop model. However, the inconsistent relationship of LAI with most VIs and saturation problems lead to uncertainty in yield estimation. Other canopy variables, such as CC can be used in the AquaCrop model (Steduto et al., 2009) for yield prediction instead of LAI.
In this paper, methodologies for potato yield prediction and its evolution were comprehensively reviewed. The advantages and disadvantages of various strategies for potato yield prediction were compared. Moreover, the uncertainties of models and multi-source data fusion for yield prediction were discussed, providing a foundation for future studies.
Currently, potato yield prediction on large farmlands commonly employs RS and CGM. RS-based methods obtain farmland image information quickly and comprehensively by making full use of the unique advantages of RS platforms and sensors, however it is difficult to reflect the intrinsic mechanism of crop growth. CGM-based methods simulate the yield formation process of the crop, but their operation is challenging due to the lack of spatial expansion. In addition, methods based on agronomic parameters, meteorological parameters, and input-output theory are also widely used in the field of potato yield prediction.
With the progress in RS platforms, sensor technologies, and AI algorithms, UAVs and satellites equipped with advanced sensors have become mainstream tools for field monitoring and yield prediction at regional scales, which can be used for resource allocation and trade decisions. In addition, with the incorporation of modules, including water, nitrogen, meteorology, and economics, mechanisms of CGM have been more comprehensive. Combined with the comparison and improvement of multi-model ensembles, potato models are continuously improved in terms of precision management.
Multi-source and time-series data have great potential for future yield prediction, despite the current study using a limited number of varieties and sample sizes for potato yield prediction. In the future, it is necessary to pay attention to large time-series data studies with multiple varieties and large sample sizes.
YL, JL and BL conducted the literature survey and drafted the article; CB, GL, SD, YY, SL, DL and LJ gave valuable comments to the manuscript and carried out critical revisions. JL and CB obtained the funding to support this study. All authors contributed to the article and approved the submitted version.
This research was supported by National Natural Science Foundation of China (32001485), Breeding new varieties for advantageous agricultural industries in Ningxia - Digital breeding system for potato in China (2019NYYZ01-4) and Key scientific and technological projects of Heilongjiang province in China (2021ZXJ05A05-03) awarded to Jiangang Liu, and China Agriculture Research System (CARS-09-P12) awarded to CB.
We are grateful to the reviewers for their valuable comments and recommendations.
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article, or claim that may be made by its manufacturer, is not guaranteed or endorsed by the publisher.
Abbas, F., Afzaal, H., Farooque, A. A., Tang, S. (2020). Crop yield prediction through proximal sensing and machine learning algorithms. Agronomy 10 (7), 1046. doi: 10.3390/agronomy10071046
Abou Ali, H., Delparte, D., Griffel, L. (2020). “From pixel to yield: Forecasting potato productivity in Lebanon and Idaho,” in The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences. Eds. Jordan, T. R., Schuckman, K. (Switzerland: ISPRS), 1–7.
Abrougui, K., Gabsi, K., Mercatoris, B., Khemis, C., Amami, R., Chehaibi, S. (2019). Prediction of organic potato yield using tillage systems and soil properties by artificial neural network (ANN) and multiple linear regressions (MLR). Soil Tillage Res. 190, 202–208. doi: 10.1016/j.still.2019.01.011
Afshar, A., Afsharmanesh, G. R., Adeli, M., Malekian, A. (2014). Assessment of AquaCrop model in the simulation of potato yield and water use efficiency under different water regimes. J. Biol. Environ. Sci. 8 (23), 79–86.
Aghighi, H., Azadbakht, M., Ashourloo, D., Shahrabi, H. S., Radiom, S. (2018). Machine learning regression techniques for the silage maize yield prediction using time-series images of Landsat 8 OLI. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 11 (12), 4563–4577. doi: 10.1109/JSTARS.2018.2823361
Akhand, K., Nizamuddin, M., Roytman, L., Kogan, F. (2016). “Using remote sensing satellite data and artificial neural network for prediction of potato yield in Bangladesh,” in Remote Sensing and Modeling of Ecosystems for Sustainability XIII. Eds. Gao, W. W., Chang, N. B. (California: SPIE), 52–66.
Alderman, P. D., Stanfill, B. (2017). Quantifying model-structure- and parameter-driven uncertainties in spring wheat phenology prediction with Bayesian analysis. Eur. J. Agron. 88, 1–9. doi: 10.1016/j.eja.2016.09.016
Al-Gaadi, K. A., Hassaballa, A. A., Tola, E., Kayad, A. G., Madugundu, R., Alblewi, B., et al. (2016). Prediction of potato crop yield using precision agriculture techniques. PloS One 11 (9), e0162219. doi: 10.1371/journal.pone.0162219
Al-Hamed, S. A., Wahby, M. F. (2016). Prediction of potato yield based on energy inputs using artificial neural networks and C-sharp under Saudi Arabia conditions. Biosci. Biotechnol. Res. Asia 13 (2), 631–644. doi: 10.13005/bbra/2079
Alva, A. K. (2010). Enhancing sustainable nutrient and irrigation management for potatoes. J. Crop Improv. 24 (3), 281–297. doi: 10.1080/15427528.2010.487742
Araus, J. L., Cairns, J. E. (2014). Field high-throughput phenotyping: the new crop breeding frontier. Trends Plant Sci. 19 (1), 52–61. doi: 10.1016/j.tplants.2013.09.008
Arce Romero, A., Monterroso Rivas, A. I., Gómez Díaz, J. D., Palacios Mendoza, M. A., Navarro Salas, E. N., López Blanco, J., et al. (2020). Crop yield simulations in Mexican agriculture for climate change adaptation. Atmósfera 33 (3), 215–231. doi: 10.20937/ATM.52430
Bala, S. K., Islam, A. S. (2009). Correlation between potato yield and MODIS-derived vegetation indices. Int. J. Remote Sens. 30 (10), 2491–2507. doi: 10.1080/01431160802552744
Bender, F. D., Sentelhas, P. C. (2020). Assessment of regional climate change impacts on Brazilian potato tuber yield. Int. J. Plant Prod. 14 (4), 647–661. doi: 10.1007/s42106-020-00111-7
Berger, K., Atzberger, C., Danner, M., D’Urso, G., Mauser, W., Vuolo, F., et al. (2018). Evaluation of the PROSAIL model capabilities for future hyperspectral model environments: A review study. Remote Sens. 10 (1), 85. doi: 10.3390/rs10010085
Bert, F. E., Laciana, C. E., Podestá, G. P., Satorre, E. H., Menéndez, A. N. (2007). Sensitivity of CERES-Maize simulated yields to uncertainty in soil properties and daily solar radiation. Agric. Syst. 94 (2), 141–150. doi: 10.1016/j.agsy.2006.08.003
Borus, D., Parsons, D., Boersma, M., Brown, H., Mohammed, C. (2018). Improving the prediction of potato productivity: APSIM-Potato model parameterization and evaluation in Tasmania, Australia. Aust. J. Crop Sci. 12 (1), 32–43. doi: 10.21475/ajcs.18.12.01.pne570
Bouman, B., Van Keulen, H., Van Laar, H., Rabbinge, R. (1996). The ‘School of de Wit’crop growth simulation models: a pedigree and historical overview. Agric. Syst. 52 (2-3), 171–198. doi: 10.1016/0308-521X(96)00011-X
Cai, C., van Velthuizen, H., Fischer, G., Prieler, S. (2006). Analyses of potato yield potential by chinese farming system zoning based on AEZ model. Chin. Potato J. 20 (4), 207–211. doi: 10.3969/j.issn.1672-3635.2006.04.005
Casa, A., Ovando, G., Bressanini, L., Martinez, J. (2013). Aquacrop model calibration in potato and its use to estimate yield variability under field conditions. Atmos. Clim. Sci. 3 (3), 397–407. doi: 10.4236/acs.2013.33041
Challinor, A. J., Smith, M. S., Thornton, P. (2013). Use of agro-climate ensembles for quantifying uncertainty and informing adaptation. Agric. For. Meteorol. 170, 2–7. doi: 10.1016/j.agrformet.2012.09.007
Chapagain, R., Remenyi, T. A., Harris, R. M. B., Mohammed, C. L., Huth, N., Wallach, D., et al. (2022). Decomposing crop model uncertainty: A systematic review. Field Crops Res. 279, 108448. doi: 10.1016/j.fcr.2022.108448
Chen, X., Wang, H. (2010). Some important applications of input-occupancy-output technique. Chin. J. Manage. 7 (12), 1737–1740+1748. doi: 10.3969/j.issn.1672-884X.2010.12.001
Cheng, Q., van Verre, W., Podd, F. J., Daniels, D. J., Peyton, A. J. (2022). “Ground penetrating radar antenna alignment for potato detection,” in 2022 23rd International Radar Symposium (IRS) (Gdansk: IEEE), 54–56.
Condori, B., Hijmans, R. J., Quiroz, R., Ledent, J.-F. (2010). Quantifying the expression of potato genetic diversity in the high Andes through growth analysis and modeling. Field Crops Res. 119 (1), 135–144. doi: 10.1016/j.fcr.2010.07.003
Cooper, M., Voss-Fels, K. P., Messina, C. D., Tang, T., Hammer, G. L. (2021). Tackling G× E× M interactions to close on-farm yield-gaps: creating novel pathways for crop improvement by predicting contributions of genetics and management to crop productivity. Theor. Appl. Genet. 134, 1625–1644. doi: 10.1007/s00122-021-03812-3
Dadrasi, A., Torabi, B., Rahimi, A., Soltani, A., Zeinali, E. (2020). Parameterization and evaluation of a simple simulation model (SSM-iCrop2) for potato (Solanum tuberosum L.) growth and yield in Iran. Potato Res. 63 (4), 545–563. doi: 10.1007/s11540-020-09456-y
Deguchi, T., Iwama, K., Haverkort, A. J. (2016). Actual and potential yield levels of potato in different production systems of Japan. Potato Res. 59 (3), 207–225. doi: 10.1007/s11540-016-9322-z
dela Torre, D. M. G., Gao, J., Macinnis-Ng, C. (2021). Remote sensing-based estimation of rice yields using various models: A critical review. Geo Spatial Inf. Sci. 24 (4), 580–603. doi: 10.1080/10095020.2021.1936656
Dewedar, O., Plauborg, F., El-Shafie, A., Marwa, A. (2021). Response of potato biomass and tuber yield under future climate change scenarios in Egypt. J. Water Land Dev. 49 (IV-VI), 139–150. doi: 10.24425/jwld.2021.137106
Doraiswamy, P. C., Hodges, T., Phinney, D. E. (1979) Crop yield literature review for agristars cropscorn, soybeans, wheat, barley, sorghumrice, cotton, and sunflowers. Available at: https://ntrs.nasa.gov/api/citations/19800015257/downloads/19800015257.pdf.
Dua, V. K., Sharma, J. (2017). Forecasting impact of climate change on potato productivity in west Bengal and adaptation strategies. Indian J. Hortic. 74 (4), 533–540. doi: 10.5958/0974-0112.2017.00103.7
Duan, D. (2019). Regional potato production estimation based on data assimilation of remote sensing information and DSSAT-SUBSTOR model. (Beijing: Chinese Academy of Agricultural Sciences).
Dyke, G. V., Avis, P. R. D. (1953). A survey of maincrop potatoes I. Estimates of yield 1948-50. J. Agric. Sci. 43 (4), 450–455. doi: 10.1017/S0021859600057920
Ejieji, C. J., Gowing, J. W. (2000). A dynamic model for responsive scheduling of potato irrigation based on simulated water-use and yield. J. Agric. Sci. 135, 161–171. doi: 10.1017/S0021859699008102
Elmetwalli, A. H., Fouda, T. Z., Ali, E. Y. (2014). High resolution satellite imagery to detect stress in potato. Acta Hortic. 1038, 97–104. doi: 10.17660/ActaHortic.2014.1038.10
Elsayed, S., El-Hendawy, S., Khadr, M., Elsherbiny, O., Al-Suhaibani, N., Alotaibi, M., et al. (2021). Combining thermal and RGB imaging indices with multivariate and data-driven modeling to estimate the growth, water status, and yield of potato under different drip irrigation regimes. Remote Sens. 13 (9), 1679. doi: 10.3390/rs13091679
Ewing, E. E., Heym, W. D., Batutis, E. J., Snyder, R. G., Ben Khedher, M., Sandlan, K. P., et al. (1990). Modifications to the simulation model POTATO for use in New York. Agric. Syst. 33 (2), 173–192. doi: 10.1016/0308-521X(90)90079-6
Fermont, A., Benson, T. (2011). Estimating yield of food crops grown by smallholder farmers: a review in the Uganda context. IFPRI Discussion Papers (1097).
Fernandes, J. L., Ebecken, N. F. F., Esquerdo, J. C. D. M. (2017). Sugarcane yield prediction in Brazil using NDVI time series and neural networks ensemble. Int. J. Remote Sens. 38 (16), 4631–4644. doi: 10.1080/01431161.2017.1325531
Ferreira, S. J., Senning, M., Sonnewald, S., Keßling, P.-M., Goldstein, R., Sonnewald, U. (2010). Comparative transcriptome analysis coupled to X-ray CT reveals sucrose supply and growth velocity as major determinants of potato tuber starch biosynthesis. BMC Genomics 11 (1), 1–17. doi: 10.1186/1471-2164-11-93
Finke, P. A. (1992). Integration of remote sensing data in the simulation of spatially variable yield of potatoes. Soil Technol. 5 (3), 257–270. doi: 10.1016/0933-3630(92)90026-W
Fortin, J. G., Anctil, F., Parent, L.-E., Bolinder, M. A. (2011). Site-specific early season potato yield forecast by neural network in Eastern Canada. Precis. Agric. 12 (6), 905–923. doi: 10.1007/s11119-011-9233-6
Frąckowiak, K., Potarzycki, J., Grzebisz, W., Szczepaniak, W. (2020). Potato nutritional status at the onset of tuberisation – a yield prediction tool. Plant Soil Environ. 66 (2), 86–92. doi: 10.17221/533/2019-PSE
Fu, Z., Jiang, J., Gao, Y., Krienke, B., Wang, M., Zhong, K., et al. (2020). Wheat growth monitoring and yield estimation based on multi-rotor unmanned aerial vehicle. Remote Sens. 12 (3), 508. doi: 10.3390/rs12030508
Garcia-Vila, M., Fereres, E. (2012). Combining the simulation crop model AquaCrop with an economic model for the optimization of irrigation management at farm level. Eur. J. Agron. 36 (1), 21–31. doi: 10.1016/j.eja.2011.08.003
Godfray, H. C. J., Beddington, J. R., Crute, I. R., Haddad, L., Lawrence, D., Muir, J. F., et al. (2010). Food security: the challenge of feeding 9 billion people. Science 327 (5967), 812–818. doi: 10.1126/science.1185383
Gómez, D., Salvador, P., Sanz, J., Casanova, J. L. (2019). Potato yield prediction using machine learning techniques and Sentinel 2 data. Remote Sens. 11 (15), 1745. doi: 10.3390/rs11151745
Gómez, D., Salvador, P., Sanz, J., Casanova, J. L. (2021). New spectral indicator Potato Productivity Index based on Sentinel-2 data to improve potato yield prediction: a machine learning approach. Int. J. Remote Sens. 42 (9), 3430–3448. doi: 10.1080/01431161.2020.1871102
Govindakrishnan, P. M., Singh, J. P., Lal, S. S., Sushma, P. (2007). A methodology for pre-harvest prediction of mean potato yield at regional scale using infocrop-potato model. Potato J. 34 (1/2), 125–126.
Griffin, T. S., Johnson, B. S., Ritchie, J. T. (1993). A simulation model for potato growth and development: Substor-potato Version 2.0. (Michigan: IBSNAT Project).
Hackett, C., Sands, P. J., Nix, H. A. (1979). A model of the development and bulking of potatoes (Solanum tuberosum L.) II. Prediction of district commercial yields. Field Crops Res. 2 (C), 333–347. doi: 10.1016/0378-4290(79)90032-7
Hajihassani, A., Ebrahimian, E., Hajihasani, M. (2013). Estimation of yield damage in potato caused by iranian population of Globodera Rostochiensis with and without aldicarb under greenhouse conditions. Int. J. Agric. Biol. 15 (2), 352–356.
Hamedani, S. R., Liaqat, M., Shamshirband, S., Al-Razgan, O. S., Al-Shammari, E. T., Petkovic, D. (2015). Comparative study of soft computing methodologies for energy input-output analysis to predict potato production. Am. J. Potato Res. 92 (3), 426–434. doi: 10.1007/s12230-015-9453-9
Hao, S., Ryu, D., Western, A., Perry, E., Bogena, H., Franssen, H. J. H. (2021). Performance of a wheat yield prediction model and factors influencing the performance: A review and meta-analysis. Agric. Syst. 194, 103278. doi: 10.1016/j.agsy.2021.103278
Haverkort, A. J., Franke, A. C., Engelbrecht, F. A., Steyn, J. M. (2013). Climate change and potato production in contrasting south african agro-ecosystems 1. Effects on land and water use efficiencies. Potato Res. 56 (1), 31–50. doi: 10.1007/s11540-013-9230-4
Haverkort, A., Franke, A., Steyn, J. M., Pronk, A., Caldiz, D., Kooman, P. (2015). A robust potato model: LINTUL-Potato-DSS. Potato Res. 58 (4), 313–327. doi: 10.1007/s11540-015-9303-7
Hijmans, R. J., Condori, B., Carrillo, R., Kropff, M. J. (2003). A quantitative and constraint-specific method to assess the potential impact of new agricultural technology: the case of frost resistant potato for the Altiplano (Peru and Bolivia). Agric. Syst. 76 (3), 895–911. doi: 10.1016/s0308-521x(02)00081-1
Hill, J. D., Strommen, N. D., Sakamoto, C. M., Leduc, S. K. (1980). LACIE - application of meteorology for united-states and foreign wheat assessment. J. Appl. Meteorol. 19 (1), 22–34. doi: 10.1175/1520-0450(1980)019<0022:Laomfu>2.0.Co;2
Holden, N. M., Brereton, A. J., Fealy, R., Sweeney, J. (2003). Possible change in Irish climate and its impact on barley and potato yields. Agric. For. Meteorol. 116 (3-4), 181–196. doi: 10.1016/S0168-1923(03)00002-9
Holm, D. G., Nylund, R. E. (1978). Use of mineral element content of potato petioles for predicting yield potential. Am. Potato J. 55 (6), 291–305. doi: 10.1007/BF02852071
Huang, S., Tang, L., Hupy, J. P., Wang, Y., Shao, G. (2021). A commentary review on the use of normalized difference vegetation index (NDVI) in the era of popular remote sensing. J. For. Res. 32 (1), 1–6. doi: 10.1007/s11676-020-01155-1
Iwase, J., Sato, Y., Comparini, D., Masi, E., Mancuso, S., Kawano, T. (2015). Non-invasive acoustic sensing of tuberous roots of sweet potato (Ipomoea batatas) growing belowground. Adv. Hortic. Sci. 29 (4), 176–180.
Jasim, A., Zaeen, A., Sharma, L. K., Bali, S. K., Wang, C., Buzza, A., et al. (2020). Predicting phosphorus and potato yield using active and passive sensors. Agriculture 10 (11), 564. doi: 10.3390/agriculture10110564
Jin, J., Huang, J., Gui, L. (2019). Optimization of potato irrigation system based on AquaCrop model. Acta Agric. Boreali-occident. Sin. 28 (08), 1250–1258. doi: 10.7606/j.issn.1004-1389.2019.08.006
Keating, B. A., Carberry, P. S., Hammer, G. L., Probert, M. E., Robertson, M. J., Holzworth, D., et al. (2003). An overview of APSIM, a model designed for farming systems simulation. Eur. J. Agron. 18 (3-4), 267–288. doi: 10.1016/S1161-0301(02)00108-9
Kelly, J., Kljun, N., Olsson, P.-O., Mihai, L., Liljeblad, B., Weslien, P., et al. (2019). Challenges and best practices for deriving temperature data from an uncalibrated UAV thermal infrared camera. Remote Sens. 11 (5), 567. doi: 10.3390/rs11050567
Khan, M. S. (2012). Assessing genetic variation in growth and development of potato. (Wageningen: Wageningen University).
Khoshnevisan, B., Rafiee, S., Omid, M., Mousazadeh, H. (2014). Prediction of potato yield based on energy inputs using multi-layer adaptive neuro-fuzzy inference system. Measurement 47, 521–530. doi: 10.1016/j.measurement.2013.09.020
Kleinwechter, U., Gastelo, M., Ritchie, J., Nelson, G., Asseng, S. (2016). Simulating cultivar variations in potato yields for contrasting environments. Agric. Syst. 145, 51–63. doi: 10.1016/j.agsy.2016.02.011
Kooman, P., Haverkort, A. (1995). “Modelling development and growth of the potato crop influenced by temperature and daylength: LINTUL-POTATO,” in Potato ecology and modelling of crops under conditions limiting growth (Wageningen: Springer), 41–59.
Krizhevsky, A., Sutskever, I., Hinton, G. E. (2017). Imagenet classification with deep convolutional neural networks. Commun. ACM 60 (6), 84–90. doi: 10.1145/3065386
Kroes, J., Supit, I., Van Dam, J., Van Walsum, P., Mulder, M. (2018). Impact of capillary rise and recirculation on simulated crop yields. Hydrol. Earth Syst. Sci. 22 (5), 2937–2952. doi: 10.5194/hess-22-2937-2018
Kulig, B., Skowera, B., Klimek-Kopyra, A., Kołodziej, S., Grygierzec, W. (2020). The use of the WOFOST model to simulate water-limited yield of early potato cultivars. Agronomy 10 (1), 81. doi: 10.3390/agronomy10010081
Kumar, P., Dubey, S., Kimothi, M. M., Neetu, Mamatha, S., Ray, S. S. (2019). “Analysis of remote sensing-based assessment of potato statistics and its comparison with government estimates,” in International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences (New Delhi: ISPRS Archives) XLII-3/W6, 299–305.
Li, D., Miao, Y., Gupta, S. K., Rosen, C. J., Yuan, F., Wang, C., et al. (2021). Improving potato yield prediction by combining cultivar information and UAV remote sensing data using machine learning. Remote Sens. 13 (16), 3322. doi: 10.3390/rs13163322
Li, Y., Wang, J., Fang, Q., Hu, Q., Zhang, J., Pan, Z., et al. (2022). Optimal planting dates for diverse crops in Inner Mongolia. Field Crops Res. 275, 108365. doi: 10.1016/j.fcr.2021.108365
Li, Y., Wang, J., Tang, J., Huang, M., Bai, H., Wang, N., et al. (2019). Coupling impacts of planting date and cultivar on potato yield. Chin. J. Eco-Agric. 27 (2), 296–304. doi: 10.13930/j.cnki.cjea.180707
Li, B., Xu, X., Zhang, L., Han, J., Bian, C., Li, G., et al. (2020). Above-ground biomass estimation and yield prediction in potato by using UAV-based RGB and hyperspectral imaging. ISPRS J. Photogramm. Remote Sens. 162, 161–172. doi: 10.1016/j.isprsjprs.2020.02.013
Liu, N., Townsend, P. A., Naber, M. R., Bethke, P. C., Hills, W. B., Wang, Y. (2021). Hyperspectral imagery to monitor crop nutrient status within and across growing seasons. Remote Sens. Environ. 255, 112303. doi: 10.1016/j.rse.2021.112303
Liu, Y., Wang, S., Chen, J., Chen, B., Wang, X., Hao, D., et al. (2022). Rice yield prediction and model interpretation based on satellite and climatic indicators using a transformer method. Remote Sens. 14 (19), 5045. doi: 10.3390/rs14195045
Luo, S., He, Y., Li, Q., Jiao, W., Zhu, Y., Zhao, X. (2020). Nondestructive estimation of potato yield using relative variables derived from multi-period LAI and hyperspectral data based on weighted growth stage. Plant Methods 16 (1), 150. doi: 10.1186/s13007-020-00693-3
Luo, X., Sun, Y., Liu, L., Wang, L., Yang, L., Gao, X. (2022). Simulation of response of potato growth and yield to drought stress in the singlecropping region in northern China: A case of Wuchuan County. Arid Land Geogr. 45 (3), 867–878. doi: 10.12118/j.issn.1000-6060.2021.350
Lyalin, K. S., Biryuk, A. A., Sheremet, A. Y., Tsvetkov, V. K., Prikhodko, D. V. (2018). “UAV synthetic aperture radar system for control of vegetation and soil moisture,” in 2018 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering, ElConRus 2018. Ed. Shaposhnikov, S. (Moscow and St. Petersburg: IEEE), 1673–1675.
Ma, Y., Ma, L., Zhang, Q., Huang, C., Yi, X., Chen, X., et al. (2022). Cotton yield estimation based on vegetation indices and texture features derived from RGB image. Front. Plant Sci. 13. doi: 10.3389/fpls.2022.925986
Ma, Y., Zhang, Z., Kang, Y., Özdoğan, M. (2021). Corn yield prediction and uncertainty analysis based on remotely sensed variables using a Bayesian neural network approach. Remote Sens. Environ. 259, 112408. doi: 10.1016/j.rse.2021.112408
MacDonald, R., Hall, F., Erb, R. (1975). “The use of Landsat data in a large area crop inventory experiment (LACIE),” in LARS Symposia (Indiana: IEEE), Paper 46.
Machakaire, A. T. B., Steyn, J. M., Caldiz, D. O., Haverkort, A. J. (2016). Forecasting yield and tuber size of processing potatoes in south africa using the LINTUL-Potato-DSS model. Potato Res. 59 (3), 195–206. doi: 10.1007/s11540-016-9321-0
Mahdian, M. H., Gallichand, J. (1997). Estimating potato yield with the SUBSTOR model in Quebec. Can. Agric. Eng. 39 (3), 157–164.
Maimaitijiang, M., Sagan, V., Sidike, P., Hartling, S., Esposito, F., Fritschi, F. B. (2020). Soybean yield prediction from UAV using multimodal data fusion and deep learning. Remote Sens. Environ. 237, 111599. doi: 10.1016/j.rse.2019.111599
Marshall, B., Heilbron, T., MacKerron, D., Waister, P. (1984). “Modelling potential dry-matter production,” in Proceedings of the 9th Triennial Conference of the European Association for Potato Research. 340–341.
Martre, P., Wallach, D., Asseng, S., Ewert, F., Jones, J. W., Rötter, R. P., et al. (2015). Multimodel ensembles of wheat growth: many models are better than one. Global Change Biol. 21 (2), 911–925. doi: 10.1111/gcb.12768
Matott, L. S., Babendreier, J. E., Purucker, S. T. (2009). Evaluating uncertainty in integrated environmental models: A review of concepts and tools. Water Resour. Res. 45, W06421. doi: 10.1029/2008WR007301
Mazurczyk, W., Nowacki, W., Takac, J. (2007). Comparison of the production and environmental effects of different potato cultivation systems based on the simulation experiment: the Daisy model. Acta Scientiarum Polonorum Agricultura 6 (3), 27–34.
Meng, X., Han, Z., Zhang, S., Sun, J., Xv, F., Xv, S., et al. (2021). Dynamic changes of chlorophyll in potato leaves and their correlation with yield. J. Jilin Agric. Sci. 46 (03), 79–81.
Mhango, J. K., Harris, E. W., Green, R., Monaghan, J. M. (2021). Mapping potato plant density variation using aerial imagery and deep learning techniques for precision agriculture. Remote Sens. 13 (14), 2705. doi: 10.3390/rs13142705
Monteith, J. L. (1972). Solar radiation and productivity in tropical ecosystems. J. Appl. Ecol. 9 (3), 747–766. doi: 10.2307/2401901
Morier, T., Cambouris, A. N., Chokmani, K. (2015). In-Season nitrogen status assessment and yield estimation using hyperspectral vegetation indices in a potato crop. Agron. J. 107 (4), 1295–1309. doi: 10.2134/agronj14.0402
Muruganantham, P., Wibowo, S., Grandhi, S., Samrat, N. H., Islam, N. (2022). A systematic literature review on crop yield prediction with deep learning and remote sensing. Remote Sens. 14 (9), 1990. doi: 10.3390/rs14091990
Nakalembe, C., Becker-Reshef, I., Bonifacio, R., Hu, G., Humber, M. L., Justice, C. J., et al. (2021). A review of satellite-based global agricultural monitoring systems available for Africa. Global Food Secur. 29, 100543. doi: 10.1016/j.gfs.2021.100543
Newton, I. H., Islam, A. M. T., Islam, A. S., Islam, G. T., Tahsin, A., Razzaque, S. (2018). Yield prediction model for potato using landsat time series images driven vegetation indices. Remote Sens. Earth Sys. Sci. 1 (1), 29–38. doi: 10.1007/s41976-018-0006-0
Ng, N., Loomis, R. S. (1984). Simulation of growth and yield of the potato crop Vol. 4 (Wageningen: Centre for Agricultural Publishing and Documentation, P.O. Box), 6700 AA.
Ninanya, J., Ramirez, D. A., Rinza, J., Silva-Diaz, C., Cervantes, M., Garcia, J., et al. (2021). Canopy temperature as a key physiological trait to improve yield prediction under water restrictions in potato. Agronomy 11 (7), 1436. doi: 10.3390/agronomy11071436
Ojeda, J. J., Rezaei, E. E., Remenyi, T. A., Webb, M. A., Webber, H. A., Kamali, B., et al. (2020). Effects of soil- and climate data aggregation on simulated potato yield and irrigation water requirement. Sci. Total Environ. 710, 135589. doi: 10.1016/j.scitotenv.2019.135589
Piekutowska, M., Niedbala, G., Piskier, T., Lenartowicz, T., Pilarski, K., Wojciechowski, T., et al. (2021). The application of multiple linear regression and artificial neural network models for yield prediction of very early potato cultivars before harvest. Agronomy 11 (5), 885. doi: 10.3390/agronomy11050885
Plauborg, F., Abrahamsen, P., Gjettermann, B., Mollerup, M., Iversen, B. V., Liu, F., et al. (2010). Modelling of root ABA synthesis, stomatal conductance, transpiration and potato production under water saving irrigation regimes. Agric. Water Manage. 98 (3), 425–439. doi: 10.1016/j.agwat.2010.10.006
Plauborg, F., Motarjemi, S. K., Nagy, D., Zhou, Z. (2022). Analysing potato response to subsurface drip irrigation and nitrogen fertigation regimes in a temperate environment using the Daisy model. Field Crops Res. 276, 108367. doi: 10.1016/j.fcr.2021.108367
Prihar, S. S., Arora, V. K., Singh, G., Singh, R. (1995). Estimating potato-tuber yield in a subtropical environment with simple radiation-based models. Exp. Agric. 31 (1), 65–73. doi: 10.1017/S0014479700025023
Prins, A. J., Van Niekerk, A. (2020). Regional mapping of vineyards using machine learning and LiDAR data. Int. J. Appl. Geospat. Res. 11 (4), 1–22. doi: 10.4018/IJAGR.2020100101
Pushpalatha, R., Santhosh Mithra, V., Sunitha, S., Goerge, J., Nedunchezhiyan, M., Mamatha, K., et al. (2021). Impact of climate change on the yield of tropical root and tuber crops vs. rice and potato in India. Food Secur 14 (2), 495–508. doi: 10.1007/s12571-021-01226-z
Quiroz, R., Loayza, H., Barreda, C., Gavilan, C., Posadas, A., Ramirez, D. A. (2017). Linking process-based potato models with light reflectance data: Does model complexity enhance yield prediction accuracy? Eur. J. Agron. 82, 104–112. doi: 10.1016/j.eja.2016.10.008
Raj, T., Hanim Hashim, F., Baseri Huddin, A., Ibrahim, M. F., Hussain, A. (2020). A survey on LiDAR scanning mechanisms. Electronics 9 (5), 741. doi: 10.3390/electronics9050741
Ramu, K., Priyadarsini, K. (2021). “A review on crop yield prediction using machine learning methods,” in Proceedings - 2nd International Conference on Smart Electronics and Communication, ICOSEC 2021 (Trichy: IEEE). 1239–1245. doi: 10.1109/ICOSEC51865.2021.9591764
Raymundo, R., Asseng, S., Cammarano, D., Quiroz, R. (2014). Potato, sweet potato, and yam models for climate change: A review. Field Crops Res. 166, 173–185. doi: 10.1016/j.fcr.2014.06.017
Raymundo, R., Asseng, S., Prassad, R., Kleinwechter, U., Concha, J., Condori, B., et al. (2017). Performance of the SUBSTOR-potato model across contrasting growing conditions. Field Crops Res. 202, 57–76. doi: 10.1016/j.fcr.2016.04.012
Raymundo, R., Asseng, S., Robertson, R., Petsakos, A., Hoogenboom, G., Quiroz, R., et al. (2018). Climate change impact on global potato production. Eur. J. Agron. 100, 87–98. doi: 10.1016/j.eja.2017.11.008
Razzaghi, F., Zhou, Z., Andersen, M. N., Plauborg, F. (2017). Simulation of potato yield in temperate condition by the AquaCrop model. Agric. Water Manage. 191, 113–123. doi: 10.1016/j.agwat.2017.06.008
Ritchie, J. T., Griffin, T. S., Johnson, B. S. (1995). SUBSTOR: functional model of potato growth, development and yield (Wageningen: Wageningen Pers), 401–435.
Ryerson, R. A., Dobbins, R. N., Thibault, C. (1985). Timely crop area estimates from landsat. Photogramm. Eng. Remote Sens. 51 (11), 1735–1743.
Salvador, P., Gómez, D., Sanz, J., Casanova, J. L. (2020). Estimation of potato yield using satellite data at a municipal level: A machine learning approach. ISPRS Int. J. Geo- nf. 9 (6), ijgi9060343. doi: 10.3390/ijgi9060343
Sands, P. J., Hackett, C., Nix, H. A. (1979). A model of the development and bulking of potatoes (Solanum Tuberosum L.) I. Derivation from well-managed field crops. Field Crops Res. 2 (C), 309–331. doi: 10.1016/0378-4290(79)90031-5
Sharma, L. K., Bali, S. K., Dwyer, J. D., Plant, A. B., Bhowmik, A. (2017). A case study of improving yield prediction and sulfur deficiency detection using optical sensors and relationship of historical potato yield with weather data in Maine. Sensors 17 (5), 1095. doi: 10.3390/s17051095
Singh, N. O., Singh, N. G., Singh, L. N., Kumar, S., Paull, A. K. (2020). Forecasting model of potato yield from farmers’ fields in Manipur. Int. J. Agric. Stat. Sci. 16 (1), 401–405.
Singha, C., Swain, K. C. (2022). “Evaluating the NDVI based Rice and Potato Yield Prediction map Using GIS Geostatistical Environment,” in 2nd International Conference on Advances in Electrical, Computing, Communication and Sustainable Technologies, ICAECT 2022 (Bhilai: IEEE). doi: 10.1109/ICAECT54875.2022.9807981
Sivarajan, S. (2011). Estimating yield of irrigated potatoes using aerial and satellite remote sensing. (Utah: Utah State University).
Snyder, R. G., Ewing, E. E. (1989). Interactive effects of temperature, photoperiod, and cultivar on tuberization of potato cuttings. HortScience 24 (2), 336–338. doi: 10.21273/HORTSCI.24.2.336
Šťastná, M., Toman, F., Dufková, J. (2010). Usage of SUBSTOR model in potato yield prediction. Agric. Water Manage. 97 (2), 286–290. doi: 10.1016/j.agwat.2009.09.015
Steduto, P., Hsiao, T. C., Raes, D., Fereres, E. (2009). Aquacrop-the FAO crop model to simulate yield response to water: I. concepts and underlying principles. Agron. J. 101 (3), 426–437. doi: 10.2134/agronj2008.0139s
Stöcker, C., Bennett, R., Nex, F., Gerke, M., Zevenbergen, J. (2017). Review of the current state of UAV regulations. Remote Sens. 9 (5), 459. doi: 10.3390/rs9050459
Sun, C., Feng, L., Zhang, Z., Ma, Y., Crosby, T., Naber, M., et al. (2020). Prediction of end-of-season tuber yield and tuber set in potatoes using in-season UAV-based hyperspectral imagery and machine learning. Sensors 20 (18), 5293. doi: 10.3390/s20185293
Sun, S., Zhang, L., Chen, Z., Sun, J. (2017). Advances in AquaCrop model research and application. Sci. Agric. Sin. 50 (17), 3286–3299. doi: 10.3864/j.issn.0578-1752.2017.17.004
Tanabe, D., Ichiura, S., Nakatsubo, A., Kobayashi, T., Katahira, M. (2019). “Yield prediction of potato by unmanned aerial vehicle,” in TAE 2019 - Proceeding of 7th International Conference on Trends in Agricultural Engineering 2019 (Prague: TAE). 540–546.
Tandzi, L. N., Mutengwa, C. S. (2020). Estimation of Maize (Zea mays L.) Yield Per Harvest Area: Appropriate methods. Agronomy 10 (1), 29. doi: 10.3390/agronomy10010029
Tang, J., Wang, J., Fang, Q., Wang, E., Yin, H., Pan, X. (2018). Optimizing planting date and supplemental irrigation for potato across the agro-pastoral ecotone in North China. Eur. J. Agron. 98, 82–94. doi: 10.1016/j.eja.2018.05.008
Tang, J., Xiao, D., Wang, J., Fang, Q., Zhang, J., Bai, H. (2021). Optimizing water and nitrogen managements for potato production in the agro-pastoral ecotone in North China. Agric. Water Manage. 253, 106945. doi: 10.1016/j.agwat.2021.106945
ten Harkel, J., Bartholomeus, H., Kooistra, L. (2020). Biomass and crop height estimation of different crops using UAV-based lidar. Remote Sens. 12 (1), 17. doi: 10.3390/rs12010017
Tian, H., Wang, P., Tansey, K., Zhang, J., Zhang, S., Li, H. (2021). An LSTM neural network for improving wheat yield estimates by integrating remote sensing data and meteorological data in the Guanzhong Plain, PR China. Agric. For. Meteorol. 310, 108629. doi: 10.1016/j.agrformet.2021.108629
Tooley, B. E., Mallory, E. B., Porter, G. A., Hoogenboom, G. (2021). Predicting the response of a potato-grain production system to climate change for a humid continental climate using DSSAT. Agric. For. Meteorol. 307, 108452. doi: 10.1016/j.agrformet.2021.108452
Travasso, M. I., Caldiz, D. O., Saluzzo, J. A. (1996). Yield prediction using the SUBSTOR-potato model under Argentinian conditions. Potato Res. 39 (3), 305–312. doi: 10.1007/BF02360922
Van Delden, A., Schröder, J. J., Kropff, M. J., Grashoff, C., Booij, R. (2003). Simulated potato yield, and crop and soil nitrogen dynamics under different organic nitrogen management strategies in The Netherlands. Agric. Ecosyst. Environ. 96 (1-3), 77–95. doi: 10.1016/S0167-8809(03)00012-4
Van der Velde, M., Nisini, L. (2019). Performance of the MARS-crop yield forecasting system for the European Union: Assessing accuracy, in-season, and year-to-year improvements from 1993 to 2015. Agric. Syst. 168, 203–212. doi: 10.1016/j.agsy.2018.06.009
Van der Zaag, D. (1984). Reliability and significance of a simple method of estimating the potential yield of the potato crop. Potato Res. 27, 51–73. doi: 10.1007/BF02356197
Van Diepen, C. A., Wolf, J., van Keulen, H., Rappoldt, C. (1989). WOFOST: a simulation model of crop production. Soil Use Manage. 5 (1), 16–24. doi: 10.1111/j.1475-2743.1989.tb00755.x
Vannoppen, A., Gobin, A. (2022). Estimating yield from NDVI, weather data, and soil water depletion for sugar beet and potato in Northern Belgium. Water 14 (8), 1188. doi: 10.3390/w14081188
Vanuytrecht, E., Raes, D., Willems, P. (2016). Regional and global climate projections increase mid-century yield variability and crop productivity in Belgium. Reg. Environ. Change 16 (3), 659–672. doi: 10.1007/s10113-015-0773-6
Wallach, D., Thorburn, P., Asseng, S., Challinor, A. J., Ewert, F., Jones, J. W., et al. (2016). Estimating model prediction error: Should you treat predictions as fixed or random? Environ. Modell. Softw. 84, 529–539. doi: 10.1016/j.envsoft.2016.07.010
Wang, H., Cheng, M., Liao, Z., Guo, J., Zhang, F., Fan, J., et al. (2023). Performance evaluation of AquaCrop and DSSAT-SUBSTOR-Potato models in simulating potato growth, yield and water productivity under various drip fertigation regimes. Agric. Water Manage. 276, 108076. doi: 10.1016/j.agwat.2022.108076
Wang, B., Feng, P., Liu, D. L., O’Leary, G. J., Macadam, I., Waters, C., et al. (2020). Sources of uncertainty for wheat yield projections under future climate are site-specific. Nat. Food 1 (11), 720–72+. doi: 10.1038/s43016-020-00181-w
Weir, A., Bragg, P., Porter, J., Rayner, J. (1984). A winter wheat crop simulation model without water or nutrient limitations. J. Agric. Sci. 102 (2), 371–382. doi: 10.1017/S0021859600042702
Weiss, M., Jacob, F., Duveiller, G. (2020). Remote sensing for agricultural applications: A meta-review. Remote Sens. Environ. 236, 111402. doi: 10.1016/j.rse.2019.111402
Wolf, J. (2002). Comparison of two potato simulation models under climate change. I. Model calibration and sensitivity analyses. Clim. Res. 21 (2), 173–186. doi: 10.3354/cr021173
Wu, X., Washaya, P., Liu, L., Li, K., Shao, Y., Meng, L., et al. (2020). Rice yield estimation based on spaceborne SAR: A review from 1988 to 2018. IEEE Access 8, 157462–157469, 9179784. doi: 10.1109/ACCESS.2020.3020182
Wu, X., Xiao, Q., Wen, J., Liu, Q., Peng, J., Li, X. (2014). Advances in uncertainty analysis for the validation of remote sensing products: Take leaf area index for example. Natl. Remote Sens. Bull. 18 (05), 1011–1023. doi: 10.11834/jrs.20143332
Xing, K., Guo, H. (2006). Review on uncertainty analysis methods in environment model. Environ. Sci. Technol. 05), 112–115+121. doi: 10.19672/j.cnki.1003-6504.2006.05.045
Yagiz, A. K., Cakici, M., Aydogan, N., Omezli, S., Yerlikaya, B. A., Ayten, S., et al. (2020). Exploration of climate change effects on shifting potato seasons, yields and water use employing NASA and national long-term weather data. Potato Res. 63 (4), 565–577. doi: 10.1007/s11540-020-09457-x
Yang, S., Liu, J., Liang, J., Yang, C., QIN, Y., Xv, X., et al. (2017). Potato climate yield prediction model based on BP neural network. J. Agric. 7 (04), 29–33. doi: 10.11923/j.issn.2095-4050.cjas16080007
Yang, G., Liu, J., Zhao, C., Li, Z., Huang, Y., Yu, H., et al. (2017). Unmanned aerial vehicle remote sensing for field-based crop phenotyping: current status and perspectives. Front. Plant Sci. 8. doi: 10.3389/fpls.2017.01111
Yibrah, G., Araya, B., Amsalu, N. (2015). Performance of aquacrop model in simulating tuber yield of potato (Solanum tuberosum L.) under various water availability conditions in Mekelle Area, Northern Ethiopia. J. Nat. Sci. Res. 5 (5), 123–130.
Yokobori, J., Niwa, K., Sugiura, R., Noguchi, N., Chiba, Y. (2004). “Variable management for uniform potato yield using remote sensing images with unmanned helicopter,” in Proceedings of the International Conference on Automation Technology for Off-road Equipment, ATOE 2004 (Kyoto: MSABE). 447–454.
Zaeen, A. A., Sharma, L., Jasim, A., Bali, S., Buzza, A., Alyokhin, A. (2020). In-season potato yield prediction with active optical sensors. Agrosyst. Geosci. Environ. 3 (1), e20024. doi: 10.1002/agg2.20024
Zhang, X., Davidson, E. A., Mauzerall, D. L., Searchinger, T. D., Dumas, P., Shen, Y. (2015). Managing nitrogen for sustainable development. Nature 528 (7580), 51–59. doi: 10.1038/nature15743
Zhou, Z., Plauborg, F., Liu, F., Kristensen, K., Andersen, M. N. (2018). Yield and crop growth of table potato affected by different split-N fertigation regimes in sandy soil. Eur. J. Agron. 92, 41–50. doi: 10.1016/j.eja.2017.10.001
Keywords: yield prediction, potato, precision agriculture, remote sensing, crop growth model
Citation: Lin Y, Li S, Duan S, Ye Y, Li B, Li G, Lyv D, Jin L, Bian C and Liu J (2023) Methodological evolution of potato yield prediction: a comprehensive review. Front. Plant Sci. 14:1214006. doi: 10.3389/fpls.2023.1214006
Received: 28 April 2023; Accepted: 06 July 2023;
Published: 26 July 2023.
Edited by:
Huiling Chen, Wenzhou University, ChinaReviewed by:
Qingquan Chu, China Agricultural University, ChinaCopyright © 2023 Lin, Li, Duan, Ye, Li, Li, Lyv, Jin, Bian and Liu. This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
*Correspondence: Chunsong Bian, YmlhbmNodW5zb25nQGNhYXMuY24=; Jiangang Liu, bGl1amlhbmdhbmdAY2Fhcy5jbg==
Disclaimer: All claims expressed in this article are solely those of the authors and do not necessarily represent those of their affiliated organizations, or those of the publisher, the editors and the reviewers. Any product that may be evaluated in this article or claim that may be made by its manufacturer is not guaranteed or endorsed by the publisher.
Research integrity at Frontiers
Learn more about the work of our research integrity team to safeguard the quality of each article we publish.